实验三A星算法求解8数码问题实验讲解
用A星算法解决八数码问题
A*算法解决八数码问题1 问题描述什么是八数码问题八数码游戏包括一个3×3的棋盘,棋盘上摆放着8个数字的棋子,留下一个空位。
与空位相邻的棋子可以滑动到空位中。
游戏的目的是要达到一个特定的目标状态。
标注的形式化如下:问题的搜索形式描述状态:状态描述了8个棋子和空位在棋盘的9个方格上的分布。
初始状态:任何状态都可以被指定为初始状态。
操作符:用来产生4个行动(上下左右移动)。
目标测试:用来检测状态是否能匹配上图的目标布局。
路径费用函数:每一步的费用为1,因此整个路径的费用是路径中的步数。
现在任意给定一个初始状态,要求找到一种搜索策略,用尽可能少的步数得到上图的目标状态。
解决方案介绍算法思想(估价函数是搜索特性的一种数学表示,是指从问题树根节点到达目标节点所要耗费的全部代价的一种估算,记为f(n)。
估价函数通常由两部分组成,其数学表达式为f(n)=g(n)+h(n)其中f(n) 是节点n从初始点到目标点的估价函数,g(n) 是在状态空间中从初始节点到n 节点的实际代价,h(n)是从n到目标节点最佳路径的估计代价。
保证找到最短路径(最优解)的条件,关键在于估价函数h(n)的选取。
估价值h(n)<= n到目标节点的距离实际值,这种情况下,搜索的点数多,搜索范围大,效率低。
但能得到最优解。
如果估价值>实际值, 搜索的点数少,搜索范围小,效率高,但不能保证得到最优解。
搜索中利用启发式信息,对当前未扩展结点根据设定的估价函数值选取离目标最近的结点进行扩展,从而缩小搜索空间,更快的得到最优解,提高效率。
启发函数进一步考虑当前结点与目标结点的距离信息,令启发函数h ( n )为当前8个数字位与目标结点对应数字位距离和(不考虑中间路径),且对于目标状态有 h ( t ) = 0,对于结点m和n (n 是m的子结点)有h ( m ) – h ( n ) <= 1 = Cost ( m, n ) 满足单调限制条件。
用A星算法解决八数码问题
A*算法解决八数码问题1 问题描述什么是八数码问题八数码游戏包括一个3×3的棋盘,棋盘上摆放着8个数字的棋子,留下一个空位。
与空位相邻的棋子可以滑动到空位中。
游戏的目的是要达到一个特定的目标状态。
标注的形式化如下:问题的搜索形式描述状态:状态描述了8个棋子和空位在棋盘的9个方格上的分布。
初始状态:任何状态都可以被指定为初始状态。
操作符:用来产生4个行动(上下左右移动)。
目标测试:用来检测状态是否能匹配上图的目标布局。
路径费用函数:每一步的费用为1,因此整个路径的费用是路径中的步数。
现在任意给定一个初始状态,要求找到一种搜索策略,用尽可能少的步数得到上图的目标状态。
解决方案介绍算法思想(估价函数是搜索特性的一种数学表示,是指从问题树根节点到达目标节点所要耗费的全部代价的一种估算,记为f(n)。
估价函数通常由两部分组成,其数学表达式为f(n)=g(n)+h(n)其中f(n) 是节点n从初始点到目标点的估价函数,g(n) 是在状态空间中从初始节点到n 节点的实际代价,h(n)是从n到目标节点最佳路径的估计代价。
保证找到最短路径(最优解)的条件,关键在于估价函数h(n)的选取。
估价值h(n)<= n到目标节点的距离实际值,这种情况下,搜索的点数多,搜索范围大,效率低。
但能得到最优解。
如果估价值>实际值, 搜索的点数少,搜索范围小,效率高,但不能保证得到最优解。
搜索中利用启发式信息,对当前未扩展结点根据设定的估价函数值选取离目标最近的结点进行扩展,从而缩小搜索空间,更快的得到最优解,提高效率。
启发函数进一步考虑当前结点与目标结点的距离信息,令启发函数h ( n )为当前8个数字位与目标结点对应数字位距离和(不考虑中间路径),且对于目标状态有 h ( t ) = 0,对于结点m和n (n 是m的子结点)有h ( m ) – h ( n ) <= 1 = Cost ( m, n ) 满足单调限制条件。
a星算法求解八数码问题python
a星算法求解八数码问题python一、介绍八数码问题是一种经典的智力游戏,也是人工智能领域中的经典问题之一。
在这个问题中,有一个3×3的棋盘,上面摆着1至8这8个数字和一个空格,初始状态和目标状态都已知。
要求通过移动数字,将初始状态变换成目标状态。
其中空格可以和相邻的数字交换位置。
为了解决这个问题,我们可以使用A*算法。
本文将详细介绍如何用Python实现A*算法来求解八数码问题。
二、A*算法简介A*算法是一种启发式搜索算法,常用于寻找最短路径或最优解等问题。
它基于Dijkstra算法,并加入了启发式函数来加速搜索过程。
在A*算法中,每个节点都有两个估价值:g值和h值。
g值表示从起点到该节点的实际代价,h值表示从该节点到目标节点的估计代价。
启发式函数f(n) = g(n) + h(n) 表示从起点到目标节点的估计总代价。
A*算法采用优先队列来保存待扩展的节点,并按照f(n)值从小到大排序。
每次取出队头元素进行扩展,并将扩展出来的新节点按照f(n)值插入队列中。
当扩展出目标节点时,算法结束。
三、八数码问题的状态表示在八数码问题中,每个状态都可以表示为一个3×3的矩阵。
我们可以用一个一维数组来表示这个矩阵,其中0表示空格。
例如,初始状态可以表示为[2, 8, 3, 1, 6, 4, 7, 0, 5],目标状态可以表示为[1, 2, 3, 8, 0, 4, 7, 6, 5]。
四、A*算法求解八数码问题的步骤1.将初始状态加入优先队列中,并设置g值和h值为0。
2.从队头取出一个节点进行扩展。
如果该节点是目标节点,则搜索结束;否则,将扩展出来的新节点加入优先队列中。
3.对于每个新节点,计算g值和h值,并更新f(n)值。
如果该节点已经在优先队列中,则更新其估价值;否则,将其加入优先队列中。
4.重复第2步至第3步直到搜索结束。
五、Python实现以下是用Python实现A*算法求解八数码问题的代码:```import heapqimport copy# 目标状态goal_state = [1,2,3,8,0,4,7,6,5]# 启发式函数:曼哈顿距离def h(state):distance = 0for i in range(9):if state[i] == 0:continuerow = i // 3col = i % 3goal_row = (state[i]-1) // 3goal_col = (state[i]-1) % 3distance += abs(row - goal_row) + abs(col - goal_col)return distance# A*算法def A_star(start_state):# 初始化优先队列和已访问集合queue = []visited = set()# 将初始状态加入优先队列中,并设置g值和h值为0heapq.heappush(queue, (h(start_state), start_state, 0))while queue:# 取出队头元素进行扩展f, state, g = heapq.heappop(queue)# 如果该节点是目标节点,则搜索结束;否则,将扩展出来的新节点加入优先队列中。
基于启发式搜索算法A星解决八数码问题
int statue[size][size]; //记录当前节点的状态 struct Node * Tparent; //用来构成搜索树,该树由搜索图的反向指针构成 struct Node * opennext; //用来构成 open 表,该指针指向该节点在 open 表中的下一个 节点 struct Node * closenext; //用来构成 open 表,该指针指向该节点在 close 表中的下一个 节点 struct Node * brothernext; //构成兄弟链表,该指针指向该节点在兄弟链表中的下一个节 点 int f; //记录当前节点的 f 函数值 int g; //记录当前节点的 g 函数的值 int h; //记录当前节点的 h 函数的值 };
5
get_bestroute (bestNode); return; }
2.2.7 生成 bestNode 所指节点的后继节点
定义一个后继节点链表,表头为 head_b,将 bestNode 所指节点的不是前驱节点的后继 节点,链接到后继及诶单链表中。getchild 函数可以实现这个功能。
//产生 bestNode 的一切后继节点。。 head head_b; //定义 bestNode 的后继节点表 head_b.next=NULL; getchild (&head_b,bestNode); //产生 bestNode 的子节点,将不是 bestNode 的父节点的
while (head_b.next!=NULL) { Node *tmp=getbrother (&head_b); //从后继节点表中取出一个节点记为 tmp,并从
八数码实验报告

八数码实验报告八数码实验报告引言:八数码,也被称为滑块拼图,是一种经典的益智游戏。
在这个实验中,我们将探索八数码问题的解决方案,并分析其算法的效率和复杂性。
通过这个实验,我们可以深入了解搜索算法在解决问题中的应用,并且探讨不同算法之间的优劣势。
1. 问题描述:八数码问题是一个在3x3的方格上进行的拼图游戏。
方格中有8个方块,分别标有1到8的数字,还有一个空方块。
游戏的目标是通过移动方块,将它们按照从左上角到右下角的顺序排列。
2. 算法一:深度优先搜索(DFS)深度优先搜索是一种经典的搜索算法,它从初始状态开始,不断地向前搜索,直到找到目标状态或者无法继续搜索为止。
在八数码问题中,深度优先搜索会尝试所有可能的移动方式,直到找到解决方案。
然而,深度优先搜索在解决八数码问题时存在一些问题。
由于搜索的深度可能非常大,算法可能会陷入无限循环,或者需要很长时间才能找到解决方案。
因此,在实际应用中,深度优先搜索并不是最优的选择。
3. 算法二:广度优先搜索(BFS)广度优先搜索是另一种常用的搜索算法,它从初始状态开始,逐层地向前搜索,直到找到目标状态。
在八数码问题中,广度优先搜索会先尝试所有可能的一步移动,然后再尝试两步移动,依此类推,直到找到解决方案。
与深度优先搜索相比,广度优先搜索可以保证找到最短路径的解决方案。
然而,广度优先搜索的时间复杂度较高,尤其是在搜索空间较大时。
因此,在实际应用中,广度优先搜索可能不太适合解决八数码问题。
4. 算法三:A*算法A*算法是一种启发式搜索算法,它在搜索过程中利用了问题的启发信息,以提高搜索效率。
在八数码问题中,A*算法会根据每个状态与目标状态之间的差异,选择最有可能的移动方式。
A*算法通过综合考虑每个状态的实际代价和启发式估计值,来评估搜索路径的优劣。
通过选择最优的路径,A*算法可以在较短的时间内找到解决方案。
然而,A*算法的实现较为复杂,需要合适的启发函数和数据结构。
A星八数码求解资料讲解

friend bool operator <(const P &a,const P &b){//按f(n)=g(n)+h(n)大小排序
return a.d+a.w>b.d+b.w; //最大堆
}
}p;
const int N=3;//棋盘大小
const string t="123405678";//目标状态
估价函数的形式可定义如下式所示:
f(n)=g(n)+h(n)其中n是被评价的当前节点。f(n)、g(n)和h(n)分别表示是对f*(n)、g*(n)和h*(n)3个函数值的估计值。
利用估价函数f(n)=g(n)+h(n)来排列open表节点顺序的图搜索算法称为算法A。在A算法中,如果对所有的x,
h(x)<=h*(x)成立,则称好h(x)为h*(x)的下界,它表示某种偏于保守的估计。采用h*(x)的下界h(x)为启发函数的A算法,称为A*算法。
而第二成节点只有654个,比第一种少了很多:
原因分析:
通过实验结果也说明了估计函数对启发式搜索算法的重要影响,因为第二种估价函数p(n)是节点与目标节点相比所需移动次数的总和,与第一种估价函数w(n)(只考虑错误位数)相比,p(n)不仅考虑了错位信息,还考虑了错位的距离,比w(n)更完美,所以它的执行效率更高。
}
}
}
if(flag%2!=0)
return -1;//搜索失败
}
6源程序(采用上述中更高效的第二种估价函数)。
//************************************
//*八数码问题
用A算法解决八数码问题

用A*算法解决八数码问题一、 题目:八数码问题也称为九宫问题。
在3×3的棋盘,有八个棋子,每个棋子上标有1至8的某一数字,不同棋子上标的数字不相同。
棋盘上还有一个空格,与空格相邻的棋子可以移到空格中。
要解决的问题是:任意给出一个初始状态和一个目标状态,找出一种从初始转变成目标状态的移动棋子步数最少的移动步骤。
二、 问题的搜索形式描述状态:状态描述了8个棋子和空位在棋盘的9个方格上的分布。
初始状态:任何状态都可以被指定为初始状态。
操作符:用来产生4个行动(上下左右移动)。
目标测试:用来检测状态是否能匹配上图的目标布局。
路径费用函数:每一步的费用为1,因此整个路径的费用是路径中的步数。
现在任意给定一个初始状态,要求找到一种搜索策略,用尽可能少的步数得到上图的目标状态算法介绍三、 解决方案介绍1.A*算法的一般介绍A*(A-Star)算法是一种静态路网中求解最短路最有效的方法。
对于几何路网来说,可以取两节点间欧几理德距离(直线距离)做为估价值,即()()()()()()**f g n sqrt dx nx dx nx dy ny dy ny =+--+--;这样估价函数f 在g 值一定的情况下,会或多或少的受估价值h 的制约,节点距目标点近,h 值小,f 值相对就小,能保证最短路的搜索向终点的方向进行。
明显优于盲目搜索策略。
A star算法在静态路网中的应用2.算法伪代码创建两个表,OPEN表保存所有已生成而未考察的节点,CLOSED表中记录已访问过的节点。
算起点的估价值,将起点放入OPEN表。
while(OPEN!=NULL){从OPEN表中取估价值f最小的节点n;if(n节点==目标节点){break;}for(当前节点n 的每个子节点X){算X的估价值;if(X in OPEN){if( X的估价值小于OPEN表的估价值 ){把n设置为X的父亲;更新OPEN表中的估价值; //取最小路径的估价值}}if(X inCLOSE){if( X的估价值小于CLOSE表的估价值 ){把n设置为X的父亲;更新CLOSE表中的估价值;把X节点放入OPEN //取最小路径的估价值}}if(X not inboth){把n设置为X的父亲;求X的估价值;并将X插入OPEN表中; //还没有排序}}//end for将n节点插入CLOSE表中;按照估价值将OPEN表中的节点排序; //实际上是比较OPEN表内节点f的大小,从最小路径的节点向下进行。
A-star-算法-八数码问题-C++-报告+代码+详细注释1
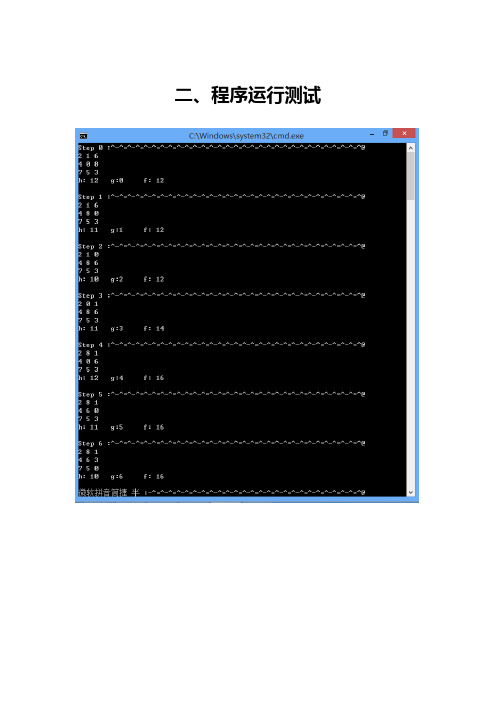
二、程序运行测试A*算法求解八数码问题一、详细设计说明1.评价函数以当前状态下各将牌到目标位置的距离之和作为节点的评价标准。
距离的定义为: “某将牌行下标与目标位置行下标之差的绝对值 + 列下标与目标位置列下标之差的绝对值”。
距离越小, 该节点的效果越好。
某个状态所有将牌到目标位置的距离之和用“h值”表示。
2.主要函数2.1countH(state & st);countH函数功能是计算st状态的h值。
2.2计算过程中将会用到rightPos数组, 数组里记录的是目标状态下, 0~9每个将牌在九宫格里的位置(位置 = 行下标 * 3 + 列下标)。
2.3f(state * p);f()=h()+level2.4look_up_dup(vector<state*> & vec, state * p);2.5在open表或close表中, 是否存在指定状态p, 当找到与p完全相等的节点时, 退出函数。
2.6search(state & start);在open表不为空时, 按f值由小到大对open表中元素进行排序。
调用findZero()函数找到0值元素的位置。
空格可以向上下左右四个方向移动, 前提是移动后不能越过九宫格的边界线。
确定某方向可走后, 空格移动一步, 生成状态p’。
2.7此时, 检查open表中是否已有p’, 若有, 更新p’数据;检查close表中是否已有p’, 若有, 将p’从close表中删除, 添加到open表中。
2.8重复的执行这个过程, 直到某状态的h值为零。
2.9dump_solution(state * q);在终端输出解路径。
// A*算法八数码问题#include"stdafx.h"#include<iostream>#include<vector>#include<time.h>#include<algorithm>using namespace std;const int GRID = 3; //Grid表示表格的行数(列数), 这是3*3的九宫格int rightPos[9] = { 4, 0, 1, 2, 5, 8, 7, 6, 3 };//目标状态时, 若p[i][j]=OMG,那么3*i+j = rightPos[OMG]struct state{int panel[GRID][GRID];int level; //记录深度int h;state * parent;state(int level) :level(level){}bool operator == (state & q){//判断两个状态是否完全相等(对应位置元素相等), 完全相等返回true,否则返回falsefor (int i = 0; i<GRID; i++){for (int j = 0; j<GRID; j++){if (panel[i][j] != q.panel[i][j])return false;}}return true;}state & operator = (state & p){ //以状态p为当前状态赋值, 对应位置元素相同for (int i = 0; i<GRID; i++){for (int j = 0; j<GRID; j++){panel[i][j] = p.panel[i][j];}}return *this;}};void dump_panel(state * p){ //将八数码按3*3矩阵形式输出for (int i = 0; i<GRID; i++){for (int j = 0; j<GRID; j++)cout << p->panel[i][j] << " ";cout << endl;}}int countH(state & st){ //给定状态st, 计算它的h值。
a算法求解八数码问题 实验报告
题目: a算法求解八数码问题实验报告目录1. 实验目的2. 实验设计3. 实验过程4. 实验结果5. 实验分析6. 实验总结1. 实验目的本实验旨在通过实验验证a算法在求解八数码问题时的效果,并对其进行分析和总结。
2. 实验设计a算法是一种启发式搜索算法,主要用于在图形搜索和有向图中找到最短路径。
在本实验中,我们将使用a算法来解决八数码问题,即在3x3的九宫格中,给定一个初始状态和一个目标状态,通过移动数字的方式将初始状态转变为目标状态。
具体的实验设计如下:1) 实验工具:我们将使用编程语言来实现a算法,并结合九宫格的数据结构来解决八数码问题。
2) 实验流程:我们将设计一个初始状态和一个目标状态,然后通过a 算法来求解初始状态到目标状态的最短路径。
在求解的过程中,我们将记录下每一步的状态变化和移动路径。
3. 实验过程我们在编程语言中实现了a算法,并用于求解八数码问题。
具体的实验过程如下:1) 初始状态和目标状态的设计:我们设计了一个初始状态和一个目标状态,分别为:初始状态:1 2 34 5 67 8 0目标状态:1 2 38 0 42) a算法求解:我们通过a算法来求解初始状态到目标状态的最短路径,并记录下每一步的状态变化和移动路径。
3) 实验结果在实验中,我们成功求解出了初始状态到目标状态的最短路径,并记录下了每一步的状态变化和移动路径。
具体的实验结果如下:初始状态:1 2 34 5 67 8 0目标状态:1 2 38 0 47 6 5求解路径:1. 上移1 2 37 8 62. 左移1 2 3 4 0 5 7 8 63. 下移1 2 3 4 8 5 7 0 64. 右移1 2 3 4 8 5 0 7 65. 上移1 2 3 0 8 5 4 7 61 2 38 0 54 7 67. 下移1 2 38 7 54 0 68. 右移1 2 38 7 54 6 0共计8步,成功从初始状态到目标状态的最短路径。
关于A算法实现的8数码问题(人工智能)

基于A*算法解决把数码问题《人工智能》专业:信息与计算科学班级:101001学号:101001102姓名:陈斌指导老师:时华日期:2013年10月14日一、问题描述8数码问题又称9宫问题,与游戏“华容道”类似。
意在给定的33⨯棋格的8个格子内分别放一个符号,符号之间互不相同,余下的一格为空格。
并且通常把8个符号在棋格上的排列顺序称作8数码的状态。
开始时,规则给定一个初始状态和一个目标状态,并要求被试者对棋格内的符号经过若干次移动由初始状态达到目标状态,这个过程中只有空格附近的符号可以朝空格的方向移动,且每次只能移动一个符号。
为方便编程和表示,本文中8个格子内的符号分别取1—8的8个数字表示,空格用0表示。
并给定8数码的初始状态和目标状态分别如图1、2所示。
图1 初始状态图2 目标状态则要求以图1为初始状态,通过交换0和0的上、下、左、右四个方位的数字(每次只能和其中一个交换),达到图2所示目标状态。
二、算法设计根据任务要求,本文采用A*搜索算法。
但要在计算机上通过编程解决该问题,还应当解决该问题在计算机上表示的方式,并设计合适的启发函数,以提高搜索效率。
①状态的表示在A*算法中,需要用到open表和closed表,特别是在open表中,待扩展节点间有很严格的扩展顺序。
因此在表示当前状态的变量中,必须要有能指向下一个扩展节点的指针,以完成对open表中元素的索引。
从这一点上看,open表中的元素相互间即构成了一个线性表,因此初步选定使用结构体表示问题的状态。
如图3所示,表示问题的结构体包括表示当前节点状态的DATA和指向open 表中下一个待扩展节点的指针NEXT。
图3 结构体现在进一步考虑DATA中包括的内容:如图1、2所示,8数码问题的提出是以一个33⨯数表表示的,因此本文中采用一个33⨯的二维数组s[3][3]表示当前状态的具体信息。
而为了保证在搜索到目标状态后能够顺利复现寻优路径,当前状态的DATA中还应该包括一个指向其父节点的指针father,这样,才能在达到目标状态后,通过指针father逐层回溯到初始状态,即复现寻优路径。
用A星算法解决八数码问题
A*算法解决八数码问题1 问题描述什么是八数码问题八数码游戏包括一个3×3的棋盘,棋盘上摆放着8个数字的棋子,留下一个空位。
与空位相邻的棋子可以滑动到空位中。
游戏的目的是要达到一个特定的目标状态。
标注的形式化如下:问题的搜索形式描述状态:状态描述了8个棋子和空位在棋盘的9个方格上的分布。
初始状态:任何状态都可以被指定为初始状态。
操作符:用来产生4个行动(上下左右移动)。
目标测试:用来检测状态是否能匹配上图的目标布局。
路径费用函数:每一步的费用为1,因此整个路径的费用是路径中的步数。
现在任意给定一个初始状态,要求找到一种搜索策略,用尽可能少的步数得到上图的目标状态。
解决方案介绍算法思想(估价函数是搜索特性的一种数学表示,是指从问题树根节点到达目标节点所要耗费的全部代价的一种估算,记为f(n)。
估价函数通常由两部分组成,其数学表达式为f(n)=g(n)+h(n)其中f(n) 是节点n从初始点到目标点的估价函数,g(n) 是在状态空间中从初始节点到n 节点的实际代价,h(n)是从n到目标节点最佳路径的估计代价。
保证找到最短路径(最优解)的条件,关键在于估价函数h(n)的选取。
估价值h(n)<= n到目标节点的距离实际值,这种情况下,搜索的点数多,搜索范围大,效率低。
但能得到最优解。
如果估价值>实际值, 搜索的点数少,搜索范围小,效率高,但不能保证得到最优解。
搜索中利用启发式信息,对当前未扩展结点根据设定的估价函数值选取离目标最近的结点进行扩展,从而缩小搜索空间,更快的得到最优解,提高效率。
启发函数进一步考虑当前结点与目标结点的距离信息,令启发函数h ( n )为当前8个数字位与目标结点对应数字位距离和(不考虑中间路径),且对于目标状态有 h ( t ) = 0,对于结点m和n (n 是m的子结点)有h ( m ) – h ( n ) <= 1 = Cost ( m, n ) 满足单调限制条件。
课程设计 用A算法解决8数码问题
课程设计用A算法解决8数码问题
8数码问题是一个组合优化问题,是指给定8个数字,请将这些数字填入九宫格,使
九宫格中每行、列、粗实线和细实线中的数字之和都相等。
本文重点讨论的是用A算法解
决8数码问题的方法,即A算法估价函数。
A算法属于启发式搜索,它的原理是:先计算当前状态的分数,再根据该分数估计状
态所代表的最终的价值,以作为当前局面的启发,判断当前局面是否是最优局面。
针对 8数码问题,A算法估价函数可计算九宫格每行、列和粗实线差值总和,它代表
九宫格中九位之和是如何与其目标值(45)的偏差程度。
根据九宫格中九位之和的偏差程
度定义该九宫格的分数:若九位之和与其目标值相等,则分数成为 0;若差值跨越两个数字,则分数变为 2;若差值跨越一个数字,则分数变为 1。
有了这一定义,A算法便可应
用在8数码问题中了。
正如上述,A算法估价函数的总分数可由九宫格所有表项的偏差程度来定义,若九宫
格所有表项的结果均跟其目标值(45)相等,总分数则为 0,反之则不是,总分数就会根
据表项有多大的偏差程度来决定。
然后A算法搜索遍历到的每个状态都可以根据它对应的
分数计算当前状态的价值,以作为启发,最终定位最优状态。
从理论上讲,A算法可以在求解8数码问题时取得良好的运算的结果,它可以很好的
评估问题的最优解,因此使得搜索树更加有效,从而减少计算机运算时间,提升解答效率。
采用A算法解决八数码问题

人工智能实验一报告题目:采用A*算法解决八数码问题姓名:XXX学号:10S003028专业:计算机科学与技术提交日期:2011-05-04目录1问题描述 .............................................................................................................................. - 2 -1.1待解决问题的解释.................................................................................................. - 2 -1.2问题的搜索形式描述.............................................................................................. - 3 -1.3解决方案介绍(原理).......................................................................................... - 4 -2算法介绍 .............................................................................................................................. - 5 -2.1A*搜索算法一般介绍 .............................................................................................. - 5 -2.2 算法伪代码 ............................................................................................................. - 6 -3算法实现 .............................................................................................................................. - 7 -3.1 实验环境与问题规模............................................................................................. - 7 -3.2 数据结构.................................................................................................................. - 8 -3.3 实验结果.................................................................................................................. - 8 -3.4系统中间及最终输出结果 ..................................................................................... - 8 -4参考文献 .............................................................................................................................. - 9 -5附录—源代码及其注释................................................................................................... - 10 -1问题描述所谓八数码问题是指这样一种游戏:将分别标有数字1,2,3,…,8 的八块正方形数码牌任意地放在一块3×3 的数码盘上。
A星算法求解八数码问题-推荐下载
是 SUC=OLD,把它添加到 BESTNDOE 的后继结点表中
否 g(SUC)<g(OLD)
是
重新确定 OLD 的父辈节点为 BESTNODE,并修正父辈节点的 g 值和 f 值,记下 g(OLD)
2
计算 f 值
计算 g(SUC)=g(BES)+k(BES,SUC)
SUC∈OPEN
对全部高中资料试卷电气设备,在安装过程中以及安装结束后进行高中资料试卷调整试验;通电检查所有设备高中资料电试力卷保相护互装作置用调与试相技互术通关,1系电过,力管根保线据护敷生高设产中技工资术艺料0不高试仅中卷可资配以料置解试技决卷术吊要是顶求指层,机配对组置电在不气进规设行范备继高进电中行保资空护料载高试与中卷带资问负料题荷试2下卷2,高总而中体且资配可料置保试时障卷,各调需类控要管试在路验最习;大题对限到设度位备内。进来在行确管调保路整机敷使组设其高过在中程正资1常料中工试,况卷要下安加与全强过,看度并22工且22作尽22下可22都能22可地护以缩1关正小于常故管工障路作高高;中中对资资于料料继试试电卷卷保破连护坏接进范管行围口整,处核或理对者高定对中值某资,些料审异试核常卷与高弯校中扁对资度图料固纸试定,卷盒编工位写况置复进.杂行保设自护备动层与处防装理腐置,跨高尤接中其地资要线料避弯试免曲卷错半调误径试高标方中高案资等,料,编试要5写、卷求重电保技要气护术设设装交备备置底4高调、动。中试电作管资高气,线料中课并敷3试资件且、设卷料中拒管技试试调绝路术验卷试动敷中方技作设包案术,技含以来术线及避槽系免、统不管启必架动要等方高多案中项;资方对料式整试,套卷为启突解动然决过停高程机中中。语高因文中此电资,气料电课试力件卷高中电中管气资壁设料薄备试、进卷接行保口调护不试装严工置等作调问并试题且技,进术合行,理过要利关求用运电管行力线高保敷中护设资装技料置术试做。卷到线技准缆术确敷指灵设导活原。。则对对:于于在调差分试动线过保盒程护处中装,高置当中高不资中同料资电试料压卷试回技卷路术调交问试叉题技时,术,作是应为指采调发用试电金人机属员一隔,变板需压进要器行在组隔事在开前发处掌生理握内;图部同纸故一资障线料时槽、,内设需,备要强制进电造行回厂外路家部须出电同具源时高高切中中断资资习料料题试试电卷卷源试切,验除线报从缆告而敷与采设相用完关高毕技中,术资要资料进料试行,卷检并主查且要和了保检解护测现装处场置理设。备高中资料试卷布置情况与有关高中资料试卷电气系统接线等情况,然后根据规范与规程规定,制定设备调试高中资料试卷方案。
人工智能实验报告 八数码
人工智能实验报告八数码人工智能实验报告八数码引言:人工智能(Artificial Intelligence,简称AI)作为一门前沿的学科,已经在各个领域展现出了巨大的应用潜力。
其中,八数码问题作为一个经典的算法问题,被广泛应用于人工智能领域。
本文将对八数码问题进行实验研究,探讨其在人工智能中的应用。
一、八数码问题的定义八数码问题是指在一个3x3的棋盘上,摆放有1至8这8个数字,其中一个格子为空。
玩家需要通过移动数字,使得棋盘上的数字按照从小到大的顺序排列,空格在最后。
八数码问题可以被抽象为一个搜索问题,即找到从初始状态到目标状态的最短路径。
二、实验方法为了解决八数码问题,我们采用了A*算法作为实验方法。
A*算法是一种启发式搜索算法,通过估计目标状态与当前状态之间的代价函数,选择最优的路径进行搜索。
在本次实验中,我们将使用曼哈顿距离作为代价函数进行搜索。
三、实验结果我们使用Python编程语言实现了八数码问题的求解算法,并进行了多组实验。
实验结果表明,A*算法在解决八数码问题上表现出了较好的效果。
在大部分情况下,A*算法能够在较短的时间内找到最优解。
四、实验讨论尽管A*算法在解决八数码问题上表现出了较好的效果,但我们也发现了一些问题。
首先,A*算法在面对复杂的八数码问题时,搜索时间会显著增加。
其次,A*算法在面对某些特定情况时,可能会陷入局部最优解,无法找到全局最优解。
这些问题需要进一步的研究和改进。
五、应用前景八数码问题作为人工智能领域的经典问题,有着广泛的应用前景。
首先,八数码问题可以被应用于游戏设计中,作为一种智能对手的算法。
其次,八数码问题的解决方法可以被应用于路径规划、图像识别等领域,提高算法的效率和准确性。
六、结论通过本次实验,我们对八数码问题进行了深入的研究和探讨。
A*算法作为一种启发式搜索算法,在解决八数码问题上表现出了较好的效果。
然而,八数码问题仍然存在一些挑战和问题,需要进一步的研究和改进。
采用A星算法实现八数码问题

人工智能实验一报告题目:采用A*算法解决八数码问题成员:李文、郭弯弯学号:、专业:计算机科学与技术完成日期: 2016/04/09一、实验要求、目的及分工1.1实验要求使用A*算法实现八数码问题,并用图形界面展示。
1.2实验目的a. 熟悉人工智能系统中的问题求解过程;b. 熟悉状态空间的盲目搜索和启发式搜索算法的应用;c. 熟悉对八数码问题的建模、求解及编程语言的应用。
1.3实验分工我们小组共两个人,共同查找背景资料,李文同学主要负责源代码,郭弯弯同学主要负责实验报告以及演示文稿的完成。
二、实验问题2.1问题描述所谓八数码问题是指这样一种游戏:将分别标有数字1,2,3,…,8 的八块正方形数码牌任意地放在一块3×3 的数码盘上。
放牌时要求不能重叠。
于是,在3×3 的数码盘上出现了一个空格。
现在要求按照每次只能将与空格相邻的数码牌与空格交换的原则,不断移动该空格方块以使其和相邻的方块互换,直至达到所定义的目标状态。
空格方块在中间位置时有上、下、左、右4个方向可移动,在四个角落上有2个方向可移动,在其他位置上有3个方向可移动,问题描述如下图所示:(a) 初始状态 (b) 目标状态图1 八数码问题示意图2.2问题解释首先,八数码问题包括一个初始状态(START) 和目标状态(TRAGET),所谓解决八数码问题就是在两个状态间寻找一系列可过渡状态:(START>STATE1>STATE2>...>TARGET )这个状态是否存在就是我们要解决的第一个问题;第二个问题是我们要求出走的路径是什么。
2.3八数码问题形式化描述初始状态:初始状态向量:规定向量中各分量对应的位置,各位置上的数字。
把3×3的棋盘写成一个二维向量。
我们可以设定初始状态:<1,5,2,4,0,3,6,7,8>后继函数:按照某种规则移动数字得到的新向量。
例如:<1,5,2,4,0,3,6,7,8> <1,0,2,4,5,3,6,7,8>路径耗散函数:规定每次移动代价为1,即每执行一条规则后总代价加1。
实验三:A星算法求解8数码问题实验讲解
实验三:A*算法求解8数码问题实验一、实验目的熟悉和掌握启发式搜索的定义、估价函数和算法过程,并利用A*算法求解N数码难题,理解求解流程和搜索顺序。
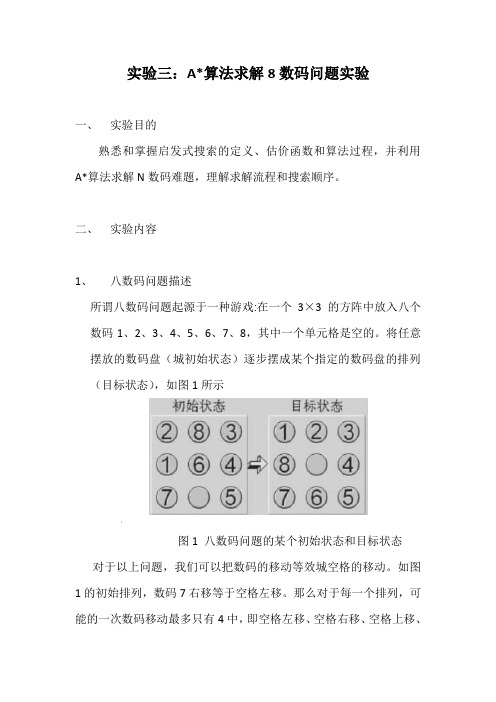
二、实验内容1、八数码问题描述所谓八数码问题起源于一种游戏:在一个3×3的方阵中放入八个数码1、2、3、4、5、6、7、8,其中一个单元格是空的。
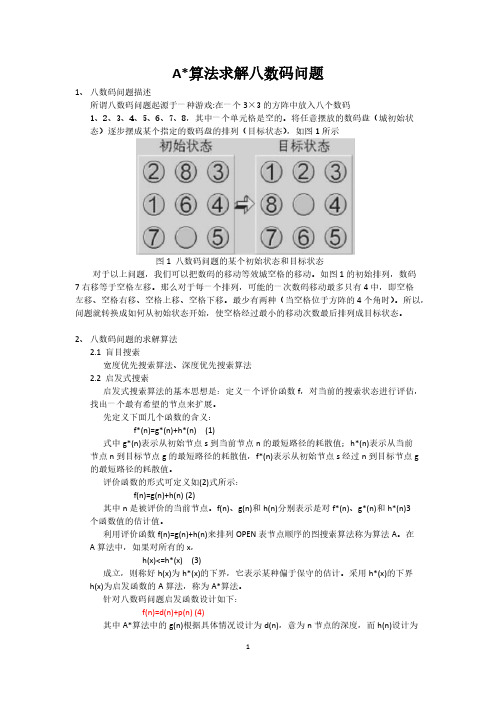
将任意摆放的数码盘(城初始状态)逐步摆成某个指定的数码盘的排列(目标状态),如图1所示:图1 八数码问题的某个初始状态和目标状态对于以上问题,我们可以把数码的移动等效城空格的移动。
如图1的初始排列,数码7右移等于空格左移。
那么对于每一个排列,可能的一次数码移动最多只有4中,即空格左移、空格右移、空格上移、空格下移。
最少有两种(当空格位于方阵的4个角时)。
所以,问题就转换成如何从初始状态开始,使空格经过最小的移动次数最后排列成目标状态。
2、八数码问题的求解算法盲目搜索宽度优先搜索算法、深度优先搜索算法启发式搜索启发式搜索算法的基本思想是:定义一个评价函数f,对当前的搜索状态进行评估,找出一个最有希望的节点来扩展。
先定义下面几个函数的含义:f*(n)=g*(n)+h*(n) (1)¥式中g*(n)表示从初始节点s到当前节点n的最短路径的耗散值;h*(n)表示从当前节点n到目标节点g的最短路径的耗散值,f*(n)表示从初始节点s经过n到目标节点g的最短路径的耗散值。
评价函数的形式可定义如(2)式所示:f(n)=g(n)+h(n) (2)其中n是被评价的当前节点。
f(n)、g(n)和h(n)分别表示是对f*(n)、g*(n)和h*(n)3个函数值的估计值。
利用评价函数f(n)=g(n)+h(n)来排列OPEN表节点顺序的图搜索算法称为算法A。
在A算法中,如果对所有的x,h(x)<=h*(x) (3)成立,则称好h(x)为h*(x)的下界,它表示某种偏于保守的估计。
采用h*(x)的下界h(x)为启发函数的A算法,称为A*算法。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实验三:A*算法求解8数码问题实验一、实验目的熟悉和掌握启发式搜索的定义、估价函数和算法过程,并利用A*算法求解N数码难题,理解求解流程和搜索顺序。
二、实验内容1、八数码问题描述所谓八数码问题起源于一种游戏:在一个3×3的方阵中放入八个数码1、2、3、4、5、6、7、8,其中一个单元格是空的。
将任意摆放的数码盘(城初始状态)逐步摆成某个指定的数码盘的排列(目标状态),如图1所示图1 八数码问题的某个初始状态和目标状态对于以上问题,我们可以把数码的移动等效城空格的移动。
如图1的初始排列,数码7右移等于空格左移。
那么对于每一个排列,可能的一次数码移动最多只有4中,即空格左移、空格右移、空格上移、空格下移。
最少有两种(当空格位于方阵的4个角时)。
所以,问题1就转换成如何从初始状态开始,使空格经过最小的移动次数最后排列成目标状态。
2、八数码问题的求解算法2.1 盲目搜索宽度优先搜索算法、深度优先搜索算法2.2 启发式搜索启发式搜索算法的基本思想是:定义一个评价函数f,对当前的搜索状态进行评估,找出一个最有希望的节点来扩展。
先定义下面几个函数的含义:f*(n)=g*(n)+h*(n) (1)式中g*(n)表示从初始节点s到当前节点n的最短路径的耗散值;h*(n)表示从当前节点n到目标节点g的最短路径的耗散值,f*(n)表示从初始节点s经过n到目标节点g的最短路径的耗散值。
评价函数的形式可定义如(2)式所示:f(n)=g(n)+h(n) (2)其中n是被评价的当前节点。
f(n)、g(n)和h(n)分别表示是对f*(n)、g*(n)和h*(n)3个函数值的估计值。
利用评价函数f(n)=g(n)+h(n)来排列OPEN表节点顺序的图搜索算法称为算法A。
在A算法中,如果对所有的x,h(x)<=h*(x) (3)成立,则称好h(x)为h*(x)的下界,它表示某种偏于保守的估计。
2采用h*(x)的下界h(x)为启发函数的A算法,称为A*算法。
针对八数码问题启发函数设计如下:f(n)=d(n)+p(n) (4)其中A*算法中的g(n)根据具体情况设计为d(n),意为n节点的深度,而h(n)设计为3开始把S放入OPEN表,记f=h是失败OPEN=NULL?否值的节点OPEN表上未设置过的具有最小f选取放入CLOSED表BESTNODE, 否是是BESTNODE 成功目标节点扩展BESTNODE,产生其后继结点SUCCESSOR建立从SUCCESSOR返回BESTNODE的指针计算g(SUC)=g(BES)+k(BES,SUC)是否OPEN∈SUCLOSEDSUSUC=OLD的后继结点表BESTNDOSUCCESSO放OPE表添BESTNOD的后g(SUC)<g(OLD)OLBESTNOD并修正父辈节点g(OLD)值,记4计图2 A*算法流程图p(n),意为放错的数码与正确的位置距离之和。
由于实际情况中,一个将牌的移动都是单步进行的,没有交换拍等这样的操作。
所以要把所有的不在位的将牌,移动到各自的目标位置上,至少要移动从他们各自的位置到目标位置的距离和这么多次,所以最有路径的耗散值不会比该值小,因此该启发函数h(n)满足A*算法的条件。
3、A*算法流程图,如图2算法总结、A*44.1,把起始状态添加到开启列表。
4.2,重复如下工作:a) 寻找开启列表中f值最低的节点,我们称它为BESTNOEb) 把它切换到关闭列表中。
c) 对相邻的4个节点中的每一个*如果它不在开启列表,也不在关闭列表,把它添加到开启列表中。
把BESTNODE作为这一节点的父节点。
记录这一节点的f和g 值*如果它已在开启或关闭列表中,用g值为参考检查新的路径是否更好。
更低的g值意味着更好的路径。
如果这样,就把这一节点的父节点改为BESTNODE,并且重新计算这一节点的f和5g值,如果保持开启列表的f值排序,改变之后需要重新对开启列表排序。
d) 停止把目标节点添加到关闭列表,这时候路径被找到,或者没有找到路径,开启列表已经空了,这时候路径不存在。
4.3,保存路径。
从目标节点开始,沿着每一节点的父节点移动直到回到起始节点。
这就是求得的路径。
5、数据结构采用结构体来保存八数码的状态、f和g的值以及该节点的父节点;struct Node{int s[3][3];//保存八数码状态,0代表空格int f,g;//启发函数中的f和g值struct Node * next;struct Node *previous;//保存其父节点};6、实验结果,如图3所示6算法求解八数码问题实验结果A*图37、源代码//-----------------------------------------------------------------------------算法求解八数码问题。
代码:利用//A*g(n)A*其中算法中的//八数码问题的启发函数设计为:f(n)=d(n)+p(n),,设计为p(n)h(n)nd(n)根据具体情况设计为,意为节点的深度,而意为放错的数码与正确的位置距离之和。
7//后继结点的获取:数码的移动等效为空格的移动。
首先判断空格上下左右的可移动性,其次移动空格获取后继结点。
//-----------------------------------------------------------------------------#include<stdio.h>#include<stdlib.h>#include<math.h>//八数码状态对应的节点结构体struct Node{int s[3][3];//保存八数码状态,0代表空格int f,g;//启发函数中的f和g值struct Node * next;struct Node *previous;//保存其父节点};int open_N=0; //记录Open列表中节点数目//八数码初始状态int inital_s[3][3]={2,8,3,1,6,4,87,0,5};//八数码目标状态int final_s[3][3]={1,2,3,8,0,4,7,6,5};//------------------------------------------------------------------------//添加节点函数入口,方法:通过插入排序向指定表添加//------------------------------------------------------------------------void Add_Node( struct Node *head, struct Node *p){struct Node *q;if(head->next)//考虑链表为空{ q = head->next;if(p->f < head->next->f){//考虑插入的节点值比链表的第一个节点值小p->next = head->next;9head->next = p;}else {while(q->next)//考虑插入节点x,形如a<= x <=b{if((q->f < p->f ||q->f == p->f) && (q->next->f > p->f ||q->next->f == p->f)){p->next = q->next;q->next = p;break;}q = q->next;}if(q->next == NULL) //考虑插入的节点值比链表最后一个元素的值更大q->next = p;}}head->next = p; else}//------------------------------------------------------------------------10//删除节点函数入口//------------------------------------------------------------------------void del_Node(struct Node * head, struct Node *p ){struct Node *q;q = head;while(q->next){if(q->next == p){q->next = p->next;p->next = NULL;if(q->next == NULL) return;// free(p);}q = q->next;}}//------------------------------------------------------------------------//判断两个数组是否相等函数入口//------------------------------------------------------------------------int equal(int s1[3][3], int s2[3][3])11{int i,j,flag=0;for(i=0; i< 3 ; i++)for(j=0; j< 3 ;j++)if(s1[i][j] != s2[i][j]){flag = 1; break;}if(!flag)return 1;else return 0;}//------------------------------------------------------------------------//判断后继节点是否存在于Open或Closed表中函数入口//------------------------------------------------------------------------int exit_Node(struct Node * head,int s[3][3], struct Node *Old_Node) {struct Node *q=head->next;int flag = 0;while(q)if(equal(q->s,s)) {flag=1;Old_Node->next = q;return 1;}12else q = q->next;if(!flag) return 0;}//------------------------------------------------------------------------//计算p(n)的函数入口//其中p(n)为放错位的数码与其正确的位置之间距离之和//具体方法:放错位的数码与其正确的位置对应下标差的绝对值之和//------------------------------------------------------------------------int wrong_sum(int s[3][3]){int i,j,fi,fj,sum=0;for(i=0 ; i<3; i++)for(j=0; j<3; j++){for(fi=0; fi<3; fi++)for(fj=0; fj<3; fj++)if((final_s[fi][fj] == s[i][j])){sum += fabs(i - fi) + fabs(j - fj);break;}13}return sum;}//------------------------------------------------------------------------//获取后继结点函数入口//检查空格每种移动的合法性,如果合法则移动空格得到后继结点//------------------------------------------------------------------------int get_successor(struct Node * BESTNODE, int direction, struct Node *Successor)//扩展BESTNODE,产生其后继结点SUCCESSOR{int i,j,i_0,j_0,temp;for(i=0; i<3; i++)for(j=0; j<3; j++)Successor->s[i][j] = BESTNODE->s[i][j];//获取空格所在位置for(i=0; i<3; i++)for(j=0; j<3; j++)if(BESTNODE->s[i][j] == 0){i_0 = i; j_0 = j;break;}switch(direction){case 0: if((i_0-1)>-1 ){14temp = Successor->s[i_0][j_0];Successor->s[i_0][j_0] = Successor->s[i_0-1][j_0];Successor->s[i_0-1][j_0] = temp;return 1;}else return 0;case 1: if((j_0-1)>-1){temp = Successor->s[i_0][j_0];Successor->s[i_0][j_0] = Successor->s[i_0][j_0-1];Successor->s[i_0][j_0-1] = temp;return 1;}else return 0;case 2: if( (j_0+1)<3){temp = Successor->s[i_0][j_0];Successor->s[i_0][j_0] = Successor->s[i_0][j_0+1];Successor->s[i_0][j_0+1] = temp;return 1;}else return 0;15case 3: if((i_0+1)<3 ){temp = Successor->s[i_0][j_0];Successor->s[i_0][j_0] = Successor->s[i_0+1][j_0];Successor->s[i_0+1][j_0] = temp;return 1;}else return 0;}}//------------------------------------------------------------------------//从OPen表获取最佳节点函数入口//------------------------------------------------------------------------struct Node * get_BESTNODE(struct Node *Open){return Open->next;}//------------------------------------------------------------------------16//输出最佳路径函数入口//------------------------------------------------------------------------void print_Path(struct Node * head){struct Node *q, *q1,*p;int i,j,count=1;p = (struct Node *)malloc(sizeof(struct Node));//通过头插法变更节点输出次序p->previous = NULL;q = head;while(q){q1 = q->previous;q->previous = p->previous;p->previous = q;q = q1;}q = p->previous;while(q){17晩焨???瀾敲楶畯?牰湩晴尨八数码的初始状态:\n);汥敳椠??瀾敲楶畯??丠??牰湩晴尨八数码的目标状态:\n);汥敳瀠楲瑮?八数码的中间态%d\n,count++);for(i=0; i<3; i++)for(j=0; j<3; j++){printf(M,q->s[i][j]);if(j == 2)printf(\);}printf(=%d, g=%d\n\n,q->f,q->g);q = q->previous;}}//------------------------------------------------------------------------处理后继结点://A*子算法入口//------------------------------------------------------------------------BESTNODE, Open, Node sub_A_algorithm(struct void * * Node struct struct Node * Closed,struct Node *Successor){18struct Node * Old_Node = (struct Node *)malloc(sizeof(struct Node)); Successor->previous = BESTNODE;//建立从successor返回BESTNODE 的指针Successor->g = BESTNODE->g + 1;//计算后继结点的g值//检查后继结点是否已存在于Open和Closed表中,如果存在:该节点记为old_Node,比较后继结点的g值和表中old_Node节点//g值,前者小代表新的路径比老路径更好,将Old_Node的父节点改为BESTNODE,并修改其f,g值,后者小则什么也不做。