基于遗传算法的污水处理模糊控制方法
几种控制方法比较
几种控制方法的性能比较专业: 控制理论与控制工程 姓名: 周燕红 学号: 200930210690摘要:本文对同一控制对象分别采用常规PID 控制,模糊控制和基于遗传算法的PID 控制进行仿真,并对仿真结果进行分析,从而得出各个控制方法的性能优劣。
关键字:常规PID ;模糊控制器;遗传算法1 常规PID 控制1.1 PID 控制原理在模拟控制系统中,控制器最常用的控制规律是PID 控制。
模拟PID 控制系统原理框图如图1-1所示。
系统由模拟PID 控制器和被控对象组成。
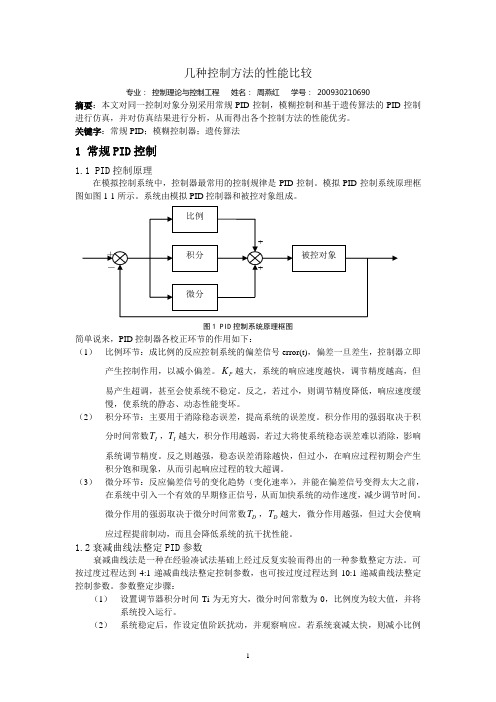
图1 PID 控制系统原理框图简单说来,PID 控制器各校正环节的作用如下:(1) 比例环节:成比例的反应控制系统的偏差信号error(t),偏差一旦差生,控制器立即产生控制作用,以减小偏差。
P K 越大,系统的响应速度越快,调节精度越高,但易产生超调,甚至会使系统不稳定。
反之,若过小,则调节精度降低,响应速度缓慢,使系统的静态、动态性能变坏。
(2) 积分环节:主要用于消除稳态误差,提高系统的误差度。
积分作用的强弱取决于积分时间常数I T ,I T 越大,积分作用越弱,若过大将使系统稳态误差难以消除,影响系统调节精度。
反之则越强,稳态误差消除越快,但过小,在响应过程初期会产生积分饱和现象,从而引起响应过程的较大超调。
(3) 微分环节:反应偏差信号的变化趋势(变化速率),并能在偏差信号变得太大之前,在系统中引入一个有效的早期修正信号,从而加快系统的动作速度,减少调节时间。
微分作用的强弱取决于微分时间常数D T ,D T 越大,微分作用越强,但过大会使响应过程提前制动,而且会降低系统的抗干扰性能。
1.2衰减曲线法整定PID 参数衰减曲线法是一种在经验凑试法基础上经过反复实验而得出的一种参数整定方法。
可按过度过程达到4:1递减曲线法整定控制参数,也可按过度过程达到10:1递减曲线法整定控制参数。
参数整定步骤:(1) 设置调节器积分时间Ti 为无穷大,微分时间常数为0,比例度为较大值,并将系统投入运行。
利用遗传算法自动生成模糊控制规则的研究

D ha uu3 )
, hnsaU i rt o i c dTcnl y C agh n e i f c nea eho g”,C agh 40 7) v sy S e n o hnsa 107
( eatet f t m ts n o ptr JhuU i rt )Jl ̄ 460 ) D pr n Ma e ac dC m u , i o n e i2,s m o h i a e s v sy ix 100 (ehSpot eatet f agh e cmm n ai us t n ogunTl o ui tn Tc uprD pr n o T nsaTl o ui tnSbti ,D nga e cmm n a o m e c o ao e ci
维普资讯
1 4
计 算 机 与 数 字 工 程
第 3 卷 4
利 用遗 传 算 法 自动生 成 模 糊 控 制 规 则 的研 究
何春梅 徐 蔚鸿 1’ 张笃 华。 ’ - 2 ’
( 沙理 工大学计算机 与通 信工程学 院 长沙 长 407 ) 107 53 1) 270 ( 吉首大学数学 与计算 机学 院 吉首 4 60 ) ’ 1 0 0 ( 东省东莞电信分公司塘厦电信分局技 术支持部 广东 广 ’
a cn o oj te. tl a sh rc d r fg n rtn ue yg n tc ̄g a h otl b ci s Iimut te p o e ue o e e i gr lsb e ei a o t m r e v l e
.
i e d l m ytm . h e ut o mua o e n n p n uu sse T e rs l f i lt n d mo - s s i
基于遗传算法优化的模糊PID控制研究及其仿真_乔志杰
收稿日期:2009-04-27作者简介:乔志杰(1983-),男,安徽固镇人,安徽电子信息职业技术学院,硕士,教师。
基于遗传算法优化的模糊PID 控制研究及其仿真乔志杰1,程翠翠2(1.安徽电子信息职业技术学院,安徽 蚌埠 233000;2.蚌埠机电工程学校,安徽 蚌埠 233000)摘 要:本文提出了一种基于遗传算法优化的模糊PI D 控制系统:采用遗传算法优化模糊控制中的隶属函数和控制规则,进一步完善了模糊PI D 控制器的性能,提高了系统的控制精度。
最后对优化后的模糊控制器进行了M atlab 仿真研究,仿真结果表明:经过优化后的控制器明显地改善了控制系统的动态性能,能使系统达到满意的控制效果,对进一步应用研究具有较大的参考价值。
关键词:MATLAB ;模糊PI D 控制;遗传算法;仿真中图分类号:TP273 文献标识码:A 文章编号:1672-9706(2009)03-0098-05R esearch on Opti m ization of Fuzzy PI D Control Basedon G enetic A lgorith m and Its Si m ulationQIAO Zhi -J ie 1,CHENG Cui -cui2(1.Anhui Vocational C ollege o f E lectronic&Infor m ation Technology,B engbu 233000,China;2.B engbu School of M echanical&E lectric E ng ineering,B engbu 233000,China )Abst ract :In th is paper ,a k i n d of opti m izati o n of fuzzy PI D con tro l syste m based on Genetic A lgorith m is discussed:The using o fGenetic A l g orith m to opti m ize the m e m bersh i p functi o n and contro l r u les o f fuzzy contro l syste m perfects the pr operties o f fuzzy PI D contro ller and i m proves the precisi o n o f control syste m.A t l a s,t theMATLAB si m ulati o n o f opti m ized fuzzy PI D contro l syste m is carried ou.t The result of si m u -lation ind i c ated that the opti m ized control syste m i m proves the dyna m ic pr operty .It can g i v e a good con -tro l perfor m ance and has a h i g h reference value for further applicati o ns .K ey w ords :MATLAB ;fuzzy PI D contro;l Genetic A l g orith m;si m u lati o n0 引言众所周知,模糊控制是当今控制领域中令人瞩目的新的控制方法和技术,它无需建模,只通过把专家的经验和控制策略总结成若干规则,采用简便、快速、灵活的手段,来完成那些用经典和现代控制难以实现的自动化和智能化的目标,因而在多个领域中得到越来越广泛的应用。
基于遗传算法优化可调整控制规则的模糊控制
t ue e c ie y a n lt x r si n h sb e e in d mlr l sd s rb d b n a ayi e p e so a e n d sg e .Th n t e i r v d g n t l oi m mpo e o c ry o tgo a a t p c e h mp o e e ei a g rt i e ly d t ar u l b l s 。 — c h s f
变 时滞 后 系统 具 有 较 好 的 适 应 能 力 。
关键词
可调 整 因子
模 糊控制 遗传算法 寻优
oPT M I I I S NG FUZZY CoNTRoL I W TH ADJ TABLE US
CoNTRoL RUL ES BAS ED oN NETI GE C ALGoRI THM
鲁棒性强 、 算法 简单 易用 、 于实 时控 制… 。但 普 通模 糊控 制 便 器也有其缺点 : 首先 , 模糊控制规则是根据 专家 的经验 制定 的 , 很难 避免带有一定 的主观性 ; 其次 , 控制规则一旦制定就不能 够 根据外界条件变 化进 行调 整 J 。这些 缺点 严重 限制 了模 糊控 制器的应用 , 尤其是 对那 些具 有参 数时变 、 时滞后较 大系统 的控 制_ 。为 了弥补这些不足 , j J 自然就考虑 到模糊 控制器应 向着 自 适应 、 自组织 和 自学 习方 向发展 , 使模糊控制规则在控制过程 中
Ke w r s y od
A js l f tr F z o t l G n t gr h O t i du t e a os u z c nr e ei a oi m b a c y o cl t pi s m e
基于遗传算法的模糊控制器设计

法, 已广 泛应 用 于 搜 索 、 化 和机 器 学 习等 方面 。对 于 单 变量 或 多 变 量 最优 化 问题 , A可 产 生 其近 似 解 。 优 G
在使 用 G A前 , 优 化 问题 应 转 化成 适 当的 函 数描 述 , 为 适 应 度 函 数 , 量 问题 性 能 的 好 坏 , 应 度越 最 称 度 适
J n.2 0 u 02
文 章编 号 :0 6 2 3 2 0 )2 0 1 4 1 0 —39 (02 0 —0 3 —0
基 于 遗 传 算 法 的模 糊 控 制 器 设 计 。
林 吉 海
( 庆 工 商 大 学 自动 化 及 电子 工 程 系 . 庆 40 3 ) 重 重 0 03
摘
统 。 卜
目前 , 大 部 分 Hc 都 是 基于 专 家的 经验 和 知识 设计 的。 然而 , 于 没 有 专 家 知识 的情 况 , 绝 对 不得 不 用 试探 法 来确 定模 糊 控制 规 则 和隶 属 函数 , 种方 法 效率 低 下 , 能 难 以满 足 要求 。在 此 , 出 了一 种基 于 这 性 提 遗 传算 法 ( A) F C的设 计 方法 。 G 的 L
1 遗 传 算 法
G A的本 质 是 一种 求 解 问题 的高 效 全 局 搜索 方 法 , 能 在搜 索 过 程 中 自动 获 取 和 积 累有 关 搜 索 空 间 它 的 知识 , 自适 应 地 控制 搜 索过 程 以求 得 最 优 解 , 于 速 度 要 求 较 高 的搜 索 问题 是 一 种 简 单 易 行 的 方 并 对
维普资讯
第 1 9卷 第 2期
Vl . 9 0 1 No. 1 2
渝州 大学学报( 自然 科 学版 )
污水处理厂智能控制系统(PDF 26页)

• 功能:预测实时出水水质BOD5。
• 技术要点: ☆输入输出参数的确定——相关性分析 ☆神经网络模型的构造 ☆训练算法的选择 ☆大量数据的训练、校正、再训练、再校正。。。
• 功能:提供专家诊断、专家分析和专家解决方案,以及故 障应急预案。
• 技术要点: ☆知识库的建立——专业、广泛、适用 ☆推理机的建立——针对性、结果性、可操作性
专家系统辅助决策树
专家系统模块结构
其它先进技术的应用
1
2
3
电能管理 设备管理 Web技术
模块
模块
的应用
电能管理(EM)模块
• 电能管理(Energy Management)模块以车间为单位, 可对每个车间以日或月为查询统计条件,分别进行电能监 测和成本核算。为管理者的调度管理及绩效考核提供参 考,并且能有效地将电能管理与优化调度策略结合起来, 实现反应全过程的优化控制,以及最大程度降低能耗的目 的。
城市污水处理厂智能控制与 节能管理( ICEM)系统
KingTrol
北京金控自动化技术有限公司
目录
1 ICEM系统介绍
污 2 遗传算法
水
3 模糊控制
处
4 神经网络
理
系
5 专家系统
统
6 其它先进技术
7 商务合作及研究团队
ICEM系统介绍
• 专门用于污水处理厂优化运行和节能降耗的自动化控制系 统。通过人工智能技术,实现污水处理过程的优化运行, 同时对全厂电能消耗和设备使用情况进行实时监测和管 理,最终实现污水处理全过程节能降耗的目的。
基于遗传算法的模糊控制理论研究及其应用(续)
因此研究双线性系统的模糊控制器之设计与优化,
就具 有很重 要 的理论 意 义和 广 阔 的 应 用前 景 , 文 本
设计 为某 化工 过程双 线性 动态模 型 :
Yt ) 一 . ( +1 = 0 9×Y t 一0 1 ×Y t ) () .8 ( 一1 +u t + () 16×u( 一1 . t )+0 4×Y( )×u( )+ . t t
Alo tm n t Ap l ain C u d ) g r h a dI pi t ( on . i s c o
JAO Ha- ig I i n ,YA i n NG J e
(col f ehncl dEetc ni e n ,agi nvrt Sho o cai l r a E gn r gJ x U i sy M aa n ci l ei i e i n o c neadTcnl y Gnhu5 10 ,hn ) f i c eho g , azo 400 C ia Se n o
工业 生产 中双线 性模 型在控 制 系统 中有非 常广 泛 的应 用 , 这种 系统 一 般 都 具 有 时变 、 非线 性 、 滞 纯
后、 随机 干扰 和多个 可测 干扰 等特征 , 此需要 设计 对
出一种适 用 于多种 干扰 、 克服 时变及 非线性 、 而更 从
近似 , 往 可 以得 到 更 符 合 实 际 系 统 的 近似 模 型 。 往
Ke r s: g n tc ag rt m ;f zy c nr l y wo d e ei o h l i u z o to ;M ATL a g a e AB l u g n
4 离线 优化 隶 属 函数
基于遗传算法优化的模糊pid控制研究及其仿真
基于遗传算法优化的模糊pid控制研究及其仿真随着工业生产自动化和精密控制的发展,PID控制器已成为控制系统中最常用的控制技术之一。
传统的PID控制方法具有一定的稳定性和可靠性,但也存在一定的缺陷,例如参数设置困难、优化效率低等问题。
为了解决这些问题,研究人员提出了基于遗传算法的模糊PID控制研究方法。
遗传算法是一种以自然选择为基础的模仿自然进化和模拟计算思想,由John Holland于1960年代提出,它能够自动调节参数并为优化问题提供有效解决方案。
它大大简化了传统PID控制中的参数设定和优化过程,使PID控制系统更加精确和可靠。
方法基于遗传算法的模糊PID控制研究方法,主要分为以下几个步骤:(1)首先,根据模糊控制的原理,为模糊PID控制器设定优化目标。
(2)确定遗传算法的迭代次数和基因池的大小。
(3)根据模糊逻辑和技术,使用遗传算法的特性建立一个模糊系统,利用遗传算法计算模糊系统参数。
(4)将计算出的参数应用到PID控制器中,进行系统仿真。
(5)根据仿真结果,对模糊系统参数进行调整,使系统性能更加稳定可靠。
结果和讨论通过基于遗传算法的模糊PID控制研究,可以得到较佳的控制系统参数,使系统稳定性和可靠性得到很大的提高。
仿真结果表明,基于遗传算法优化的模糊PID控制器在系统参数设置和稳定性方面有着良好的优势。
结论是,在工业生产自动化和精密控制中,基于遗传算法优化的模糊PID控制是一种有效的控制策略,它能够有效改善系统性能,提高系统稳定性和可靠性。
结论基于遗传算法优化的模糊PID控制是一种有效的控制策略,能够提高其稳定性和可靠性,从而有效改善系统性能。
但是,需要指出的是,以上研究主要集中在参数设计和优化上,而对系统动态和实时应用方面尚未有深入研究,仍有许多工作需要去完善。
基于遗传算法的模糊迭代学习控制算法
龙源期刊网 基于遗传算法的模糊迭代学习控制算法作者:郝晓弘金亚蓉马宇李恒杰来源:《计算机应用》2013年第04期0引言迭代学习控制可实现被控对象在有限时间区间上对期望输出的完全跟踪,它已成为智能控制的一个重要分支。
为了提高被控系统的控制精度、加快迭代域内收敛速度、优化迭代学习控制器参数,常将其与其他智能控制方法相结合,以期对非线性、不确定的复杂控制系统达到更好的控制效果。
模糊控制处理难以建立精确数学模型的系统具有较强的鲁棒性,因此,诸多学者将迭代学习控制与模糊控制相结合,以达到较为理想的控制效果。
遗传算法是建立在自然选择和自然遗传学机理基础上的迭代自适应随机搜索算法,其算法简单、鲁棒性强,能够解决许多传统的优化方法难以解决的问题,已在诸多领域得到应用和发展。
Pok等[1]提出一种模糊迭代学习控制(Iterative Learning Control,ILC)算法,该算法将以前迭代控制信号进行滤波之后,并与当前的误差及误差的导数的累加作为模糊迭代学习控制器输出,仿真实验验证这种新的算法提高了系统跟踪的准确性。
Precup等[2]运用ILC算法提出了mamdani PIfuzzy控制器。
张丽萍等[3]针对TS 模糊系统的轨迹跟踪控制问题,提出了基于正交多项式的迭代学习算法,并进行了仿真研究。
Ebadat等[4]提出了一种新型的模糊迭代学习控制方法。
在提出的方法中,模糊系统和ILC学习速度系数的计算使用优化算法。
不仅保持ILC的优势,而且通过模糊TSK(TakagiSugenoKang)模型产生合适的更新规则。
仿真结果表明该方法的优势。
本文提出一种基于遗传算法的模糊迭代学习控制算法,该算法运用遗传算法离线优化计算模糊迭代学习控制器的参数,并运用模糊TSK模型产生合理的迭代学习算法,实现对被控系统在迭代域内稳定收敛,并利用参数优化实现迭代学习算法的快速收敛。
基于遗传算法的模糊控制器的优化设计——采用模糊数据挖掘技术
设 计 模糊 控 制 器 的 核 心 问 题 是 模 糊 控 制 规则 的 获 取 和 隶 属 度 函数 参数 的确 定 , 计过 程 往 往 依 赖 于 系 统专 家 的 经 验 和 设 知 识 , 是 这种 先 验 知识 往 往 是 不 够 全 面 的 , 了解 决 这 一 问 但 为 题. 人们 一 直 在 研究 自动 生成 以及 优化 隶属 度 函 数 和 控 制 规 则 的方 法 与技 术 _ 近 年 来 . l _ 。 由数 据 设 计 一 个 模糊 控 制 系 统 来 拟 合
rc l r m o a h r d i p t o tu aaT e p o o e meh d c n p c p fz y r l mo e s a d d tr n h a e t fo s me g t e e n u - u p td t. h r p s d y to a ik u u z u e d l n ee mi e t e p — r mee s f a tr o me e s i f n t n o a h n u a a l a t mai al f m d q ae d t m、 d i c n p i z it — mb rh p u c i s f e c i p t v r b e u o t l r o i c y o a e u t au An t a o t mie n e g ae h a a t r f me e s i u cin u i g e l c d d r td t e p r me e s o mb rh p fn t s sn a r a o e Ge ei A g r h . i al a y i a f n t n o o — o nt c lo t msF n l i y, tpc l u ci f n n o
比较专家系统、模糊方法、遗传算法、神经网络、蚁群算法的特点及其适合解决的实际问题

比较专家系统、模糊方法、遗传算法、神经网络、蚁群算法的特点及其适合解决的实际问题一、专家系统(Expert System)1,什么是专家系统?在日常生活中大家所认知的“专家”一般都拥有某一特定领域的大量专业知识,以及丰富的实际经验。
在解决问题时,专家们通常拥有一套独特的思维方式,能较圆满地解决一类困难问题,或向用户提出一些建设性的建议等。
专家系统一般定义为一个具有智能特点的计算机程序。
它的智能化主要表现为能够在特定的领域内模仿人类专家思维来求解复杂问题。
因此,专家系统必须包含领域专家的大量知识,拥有类似人类专家思维的推理能力,并能用这些知识来解决实际问题。
专家系统的基本结构如图1所示,其中箭头方向为数据流动的方向。
图1 专家系统的基本组成专家系统通常由知识库和推理机两个主要组成要素。
知识库存放着作为专家经验的判断性知识,例如表达建议、 推断、 命令、 策略的产生式规则等, 用于某种结论的推理、 问题的求解,以及对于推理、 求解知识的各种控制知识。
知识库中还包括另一类叙述性知识, 也称作数据,用于说明问题的状态,有关的事实和概念,当前的条件以及常识等。
专家系统的问题求解过程是通过知识库中的知识来模拟专家的思维方式的,因此,知识库是专家系统质量是否优越的关键所在,即知识库中知识的质量和数量决定着专家系统的质量水平。
一般来说,专家系统中的知识库与专家系统程序是相互独立的,用户可以通过改变、完善知识库中的知识内容来提高专家系统的性能。
推理机实际上是一个运用知识库中提供的两类知识,基于木某种通用的问题求解模型,进行自动推理、 求解问题的计算机软件系统。
它包括一个解释程序, 用于决定如何使用判断性知识推导新的知识, 还包括一个调度程序, 用于决定判断性知识的使用次序。
推理机的具体构造取决于问题领域的特点,及专家系统中知识表示和组织的方法。
推理机针对当前问题的条件或已知信息,反复匹配知识库中的规则,获得新的结论,以得到问题求解结果。
飞行器的控制方法和技术

飞行器的控制方法和技术在飞行器的发展历程中,控制是一个非常重要的环节。
无论是民用飞机、军用战机,还是直升机、无人机等各种飞行器,都需要通过控制系统来实现飞行和操纵。
这些控制系统中运用了多种控制方法和技术,下面就对一些常见的控制方法和技术进行简要介绍。
一、PID控制技术PID控制技术是一种常见的控制方法,它的全称是比例-积分-微分控制技术,通过对被控对象进行实时的测量和反馈,调整控制参数,来保持被控对象的运动状态。
PID控制技术最大的优点是简单易懂,对于一些需要精密控制的系统,如飞行器、机器人等,都有广泛的应用。
在飞行器中,PID控制技术可以用于控制飞行器的姿态和高度等参数,保持飞行器的平衡状态,从而实现稳定的飞行。
例如,飞机的自动驾驶系统、直升机的稳定器以及无人机的高度控制系统,都可以运用PID控制技术来实现。
二、模糊控制技术模糊控制技术是一种基于模糊逻辑的控制方法,它可以针对复杂的控制问题,提供一种有效的解决方案。
在飞行器中,模糊控制技术可以用于控制飞行器的姿态、高度、速度等参数。
模糊控制技术对于飞行器的稳定性和鲁棒性有很好的保障,可以针对不同的控制要求进行定制化的优化。
三、神经网络控制技术神经网络控制技术是一种基于神经网络的智能控制方法,它能够模拟人类神经系统的学习和适应能力,通过学习已有的控制模型,并根据反馈信息进行调整,使控制系统能够适应不同的控制场景,并不断优化控制结果。
在飞行器中,神经网络控制技术可以用于控制飞行器的自主导航和自主控制。
例如,无人机的自主导航系统、飞机的自动驾驶系统等,都可以依靠神经网络控制技术实现智能化的控制。
四、遗传算法控制技术遗传算法控制技术是一种基于遗传算法的控制方法,它能够通过遗传算法的进化和优化过程,找到最优的控制参数组合,从而实现控制效果的最大化。
在飞行器中,遗传算法控制技术可以用于优化飞行器的控制模型。
例如,可以使用遗传算法寻找最优的控制参数组合,优化飞机的稳定性、速度、燃油消耗等多种因素,从而提高飞行器的性能和控制效果。
模糊PID控制中模糊控制规则的获取方法

模糊PID控制中模糊控制规则的获取方法一、概述随着工业自动化程度的不断提高,控制系统对于精确性和鲁棒性的要求也日益增强。
传统的PID控制方法虽然在实际应用中得到了广泛运用,但在处理非线性、时变以及具有不确定性的系统时,其控制效果往往不尽如人意。
模糊PID控制作为一种结合了模糊控制理论与PID控制优点的先进控制方法,逐渐受到了人们的关注。
模糊PID控制的核心在于通过模糊控制规则对PID控制器的参数进行在线调整,以适应系统特性的变化。
而模糊控制规则的获取则是实现模糊PID控制的关键步骤之一。
一个好的模糊控制规则不仅能够提高控制系统的性能,还能够降低系统的复杂度,使其更加易于实现和维护。
模糊控制规则的获取方法主要包括基于经验的方法、基于优化的方法以及基于学习的方法等。
基于经验的方法主要依赖于专家知识或实际操作经验,虽然简单易行,但往往缺乏足够的理论依据和普适性。
基于优化的方法则通过数学优化算法来寻找最优的模糊控制规则,虽然能够得到较为精确的结果,但计算复杂度较高,且对于复杂系统的优化问题可能难以求解。
而基于学习的方法则利用机器学习或深度学习等技术,通过大量数据的学习来获取模糊控制规则,这种方法具有更强的自适应性和泛化能力,但也需要足够的数据支持。
针对模糊PID控制中模糊控制规则的获取方法进行研究,具有重要的理论意义和实际应用价值。
本文旨在探讨各种模糊控制规则获取方法的优缺点及适用范围,为模糊PID控制的实际应用提供有益的参考。
1. 模糊PID控制的基本概念及特点模糊PID控制是一种结合模糊逻辑与PID控制算法的高级控制策略。
PID控制,即比例积分微分控制,是工业控制领域中应用最为广泛的控制方法之一。
传统的PID控制方法在面对复杂、非线性或时变系统时,往往难以取得理想的控制效果。
引入模糊逻辑对PID控制进行改进和优化,以提高其适应性和控制性能,成为了一种重要的研究方向。
模糊PID控制的核心思想是利用模糊逻辑对PID控制器的三个关键参数——比例系数Kp、积分系数Ki和微分系数Kd进行动态调整。
基于遗传算法的模糊控制系统设计与实现

基于遗传算法的模糊控制系统设计与实现近年来,遗传算法和模糊控制理论被广泛用于自动控制系统中,利用这两种技术设计出的模糊控制器在真实环境中的控制效果也越来越好,成为自动控制领域的一个热点。
本文基于遗传算法设计模糊控制系统,介绍了模糊控制原理、遗传算法原理,以及他们在控制系统中的应用。
一、模糊控制模糊控制是一种基于模糊逻辑的控制方法,与传统的精确控制相比,模糊控制在控制精度、效率和适用性方面都有很大的优势。
其基本思想是将模糊语言量化成数学变量,建立模糊规则库,通过模糊推理实现控制。
模糊控制器由输入量、输出量和一组模糊规则构成,输入量通过模糊化处理转换为隶属度函数,输出量通过去模糊化处理转换为实际控制量,模糊规则库定义了基于输入量和输出量之间的关系的一组规则。
对于模糊化,通常使用三角形或梯形隶属度函数,其中三角形隶属度函数通常表示有界语言,梯形隶属度函数通常表示无界语言。
对于去模糊化,通常使用常见的几何平均法或重心法等方法。
二、遗传算法遗传算法是一种模拟自然进化的优化算法,通过逐代迭代,模拟自然选择和基因交叉等现象,实现优良个体的筛选和优化。
遗传算法的具体过程包括选择、交叉和变异操作,其中选择操作保留精英个体,交叉操作模拟基因交换,变异操作模拟基因突变。
在遗传算法中,每个解都通过一个适应度函数来评价其好坏,适应度越高,该解在进化过程中被选择的概率越大。
通过迭代优化过程中的选择、交叉和变异操作,最终找到全局最优解。
三、基于遗传算法的模糊控制系统设计基于遗传算法的模糊控制系统设计流程如下:1. 确定目标量和控制量首先需要确定需要控制的目标量和控制量,即控制系统的输入和输出量,例如温度和加热功率之间的关系。
2. 设计模糊控制器根据目标量和控制量的数学模型设计模糊控制器,建立隶属度函数和模糊规则库,通过模糊推理实现控制。
3. 设计适应度函数由于遗传算法是基于适应度函数进行搜索的,在设计模糊控制系统时,需要根据控制目标制定适应度函数,以便算法能够自适应地搜索最优解。
采用遗传算法优化的模糊控制系统

Fu z n r lSy t m s d on GA tm i ai z y Co to se Ba e Op i z ton
ZHU e — u LU n — h a g , W ih a , Ro g s u n YANG e —o g W nln
( . p . f n o mai nE gn ei g J n x l r f s in l n t u e Ga z o 4 0 C i a 1 De t o f r t n ie r , i g i d P o e s a I s t t, n h u3 0 , h n I o n a Go o i 1 0
维普资讯
兵 工 自动 化
囊控 技市
M e s r me t n n r l e h i u a u e n d Co t c n q e a o T
O. . t ma i n I Au o t o 2 0 Vo . 5 No 8 0 6, 1 2 , .
Absr c : o h y a c mo e f i v re e d l m y t m . d p e u z o to t o t e T S f z y c n r le ta t F rt e d n mi d lo n e t d p n u u s se a o t d f z y c n r lme h d. h - u z o to l r b s d o h t t e d a k wa e i n d.T e r a u a e n t e sa e f e b c s d s g e h e ln mb r c d s u e n v r h o e o e wa s d a d e e y c r mo o s c r e p n e o s me wa o r s o d d t
遗传算法的简介、操作步骤、模式理论、算法实现、改进、在模糊控制中的应用、求极大值、PID整定

1.2 遗传算法的基本思想
1.3 遗传算法的搜索机制
遗传算法模拟自然选择和自然遗传过程中发生的繁殖、交叉和基 因突变现象,在每次迭代中都保留一组候选解,并按某种指标从 种群中选取较优的个体,利用遗传算子(复制、交叉和变异)对这 些个体进行组合,产生新一代的候选解群,重复此过程,直到满 足某种收敛指标为止。
期望的选择次 数fi/¯fi
实际的选 择次数
1
01101
13
0.14
0.58
1
2
11000
24
576
0.49
1.92
0.22
2
0
3
01000
8
64 361
0.06
4
10011
19
0.31
1.23
1
总计
1170
1
4
4
平均
293
0.25
1
1
最大值
576
0.49
1.97
2
2.4
交叉
复制:将更好的方案推广
2.6 结论
随机产生的四个初始串为:01101,11000,01000,10011。 对应的x的值为13,24,8,19 平均适配值:293 最大适配值:576 经过一次复制、交叉和变异操作之后,种群中最优个体的适
配值和平均适配值均有所提高。可见每经过一次这样的遗传 经复制后产生的新的种群为:01101,11000,11000,10011 算法步骤,问题的解便朝着最优解方向前进了一步,只要这 对应的x的值为13,24,24,19 个过程一直进行下去,它最终会走向全局最优解,而每一步 平均适配值:421 的操作是非常简单的,而且对问题的依赖性很小。 最大适配值:576
遗传算法在模糊控制规则优化中的实现
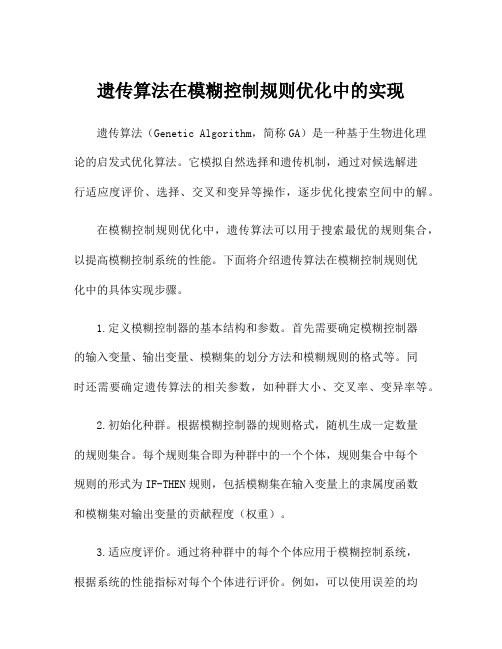
遗传算法在模糊控制规则优化中的实现遗传算法(Genetic Algorithm,简称GA)是一种基于生物进化理论的启发式优化算法。
它模拟自然选择和遗传机制,通过对候选解进行适应度评价、选择、交叉和变异等操作,逐步优化搜索空间中的解。
在模糊控制规则优化中,遗传算法可以用于搜索最优的规则集合,以提高模糊控制系统的性能。
下面将介绍遗传算法在模糊控制规则优化中的具体实现步骤。
1.定义模糊控制器的基本结构和参数。
首先需要确定模糊控制器的输入变量、输出变量、模糊集的划分方法和模糊规则的格式等。
同时还需要确定遗传算法的相关参数,如种群大小、交叉率、变异率等。
2.初始化种群。
根据模糊控制器的规则格式,随机生成一定数量的规则集合。
每个规则集合即为种群中的一个个体,规则集合中每个规则的形式为IF-THEN规则,包括模糊集在输入变量上的隶属度函数和模糊集对输出变量的贡献程度(权重)。
3.适应度评价。
通过将种群中的每个个体应用于模糊控制系统,根据系统的性能指标对每个个体进行评价。
例如,可以使用误差的均方根(Root Mean Square Error,RMSE)作为评价指标,以衡量模糊控制器的控制效果。
4.选择操作。
根据适应度评价结果,根据一定的选择策略选择一定数量的个体作为下一代的父代。
选择策略常用的有轮盘赌选择、竞争选择等。
5.交叉操作。
从父代中选择两个个体,根据交叉率决定是否进行交叉操作。
交叉操作可以采用单点交叉、多点交叉等方式,将两个个体的部分基因片段进行交换,生成两个子代。
6.变异操作。
对于进行了交叉操作的个体,根据变异率决定是否进行变异操作。
变异操作可以随机改变个体中某些基因的值,以增加搜索空间的多样性。
7.更新种群。
将选择、交叉和变异等操作得到的子代个体合并到种群中,形成新一代的种群。
8.终止条件判断。
设置适当的终止条件,如达到指定的迭代次数、满足一定收敛要求等,判断是否终止优化过程。
9.反复迭代。
重复进行2-8步骤,直到满足终止条件。
几种控制方法比较

几种控制方法的性能比较专业:控制理论与控制工程姓名:周燕红学号:200930210690摘要:本文对同一控制对象分别采用常规PID控制,模糊控制和基于遗传算法的PID控制进行仿真,并对仿真结果进行分析,从而得出各个控制方法的性能优劣。
关键字:常规PID ;模糊控制器;遗传算法1常规PID控制1.1 PID控制原理在模拟控制系统中,控制器最常用的控制规律是PID控制。
模拟PID控制系统原理框图如图1-1所示。
系统由模拟PID控制器和被控对象组成。
图1 PID控制系统原理框图简单说来,PID控制器各校正环节的作用如下:(1)比例环节:成比例的反应控制系统的偏差信号error(t),偏差一旦差生,控制器立即产生控制作用,以减小偏差。
K p越大,系统的响应速度越快,调节精度越高,但易产生超调,甚至会使系统不稳定。
反之,若过小,则调节精度降低,响应速度缓慢,使系统的静态、动态性能变坏。
(2)积分环节:主要用于消除稳态误差,提高系统的误差度。
积分作用的强弱取决于积分时间常数T I,T越大,积分作用越弱,若过大将使系统稳态误差难以消除,影响系统调节精度。
反之则越强,稳态误差消除越快,但过小,在响应过程初期会产生积分饱和现象,从而引起响应过程的较大超调。
(3)微分环节:反应偏差信号的变化趋势(变化速率),并能在偏差信号变得太大之前,在系统中引入一个有效的早期修正信号,从而加快系统的动作速度,减少调节时间。
微分作用的强弱取决于微分时间常数T D,T D越大,微分作用越强,但过大会使响应过程提前制动,而且会降低系统的抗干扰性能。
1.2衰减曲线法整定PID参数衰减曲线法是一种在经验凑试法基础上经过反复实验而得出的一种参数整定方法。
可按过度过程达到4:1递减曲线法整定控制参数,也可按过度过程达到10:1递减曲线法整定控制参数。
参数整定步骤:(1)设置调节器积分时间Ti为无穷大,微分时间常数为0,比例度为较大值,并将系统投入运行。
基于免疫遗传算法优化的模糊控制方法及其应用

能; ) 2 具有抗体 的多样 性保持 功能 ; ) 3 具有 自我调 节 功能。 这些功能使免疫遗传算 法既保留了遗传算法随机全局并行搜 索的特点 , 又在 相当大程度上避免 了未成熟 收敛 , 确保快速 收
敛于全局最优解 。
HUANG a L — i g Hu , IAip n ,LI Xin— n N a ku
(ntu dacdMauatr g Tcnl y ogi n e i ,S a g a 0 02 hn ) Istt o vne nfc i ehoo ,Tni U i r t h nh i 0 9 ,C i i e fA un g v sy 2 a
n m r a cnr ( N )m ciepoeswt t s to hw ta tep p dm to a bt rpr r nc o prd u e c ot l C C ahn r s i i me d so th r pe e d hse t e oma ecm ae il o c h h h h o h e f
O p i ia i n ff z y l g c c n r l tm z to o u z o i o t o
b s d o mu e GA n p l a i n i ae n i m n- a d a p i to n CNC a h n n c m c ii g
维普资讯
第2 7卷 第 7期
20 0 7年 7月
文 章 编 号 :0 1 0 1 2 0 ) 7—13 o 10 —9 8 ( 07 0 7 7一 4
计算机 应 用
C mp trAp l ain o ue p i t s c o
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2009年1月第16卷第1期控制工程Contr ol Engineering of China Jan.2009Vol .16,No .1文章编号:167127848(2009)0120046203 收稿日期:2007212205; 收修定稿日期:2008201202 基金项目:国家自然科学基金资助项目(60304012);北京市科技新星计划基金资助项目(H022*********) 作者简介:白敏丹(19642),女,陕西合阳人,副教授,研究生,主要从事信息与控制等方面的教学与科研工作。
基于遗传算法的污水处理模糊控制方法白敏丹1,2,韩红桂1,乔俊飞1(1.北京工业大学电子信息与控制工程学院,北京 100022; 2.中国传媒大学信息工程学院,北京 100024)摘 要:模糊控制中的模糊推理规则和隶属函数的选取往往依据相关专家或技术人员的实际经验,对具有较强的非线性系统和未知动态环境条件下,其控制性能往往达不到很好的效果。
使用遗传算法同时对隶属函数和模糊规则进行优化,从而使模糊推理规则和隶属函数的确定摆脱了人为经验的局限,提高了模糊控制的自适应能力。
在此基础上设计出模糊控制器,并将其应用于污水处理溶解氧的控制中。
实验结果表明,该控制器能够使溶解氧快速、准确地达到期望的要求。
关 键 词:模糊控制;遗传算法;优化;污水处理中图分类号:TP 11 文献标识码:AFuzzy Contr ol f orWaste water Treat m ent Based on Genetic Alg orith mBA I M in 2dan1,2,HAN Hong 2gui 1,Q I AO Jun 2fei1(1.School of Electr onic I nfor mati on &Contr ol Engineering,Beijing University of Technol ogy,Beijing 100022,China;2.I nf or mati on Engineering School,Communicati on University of China,Beijing 100024,China )Abstract:The selecti on of inferential rules of the fuzzy contr ollers and me mbershi p functi ons depend mainly on the subjective experi 2ence of experts,which does not work well in the cases of great disturbances and unknowns .The membershi p functi ons and inferential rules are op ti m ized si m ultaneously by the genetic algorith m,s o that the deter m inati on got rid of the artificial experience li m itati on t o i m 2p r ove the rules and me mbershi p functi ons .Based on that a fuzzy contr oller is designed for the waste water treat m ent .The si m ulated re 2sults de monstrate the effectiveness and feasibility of the p r oposed method .Key words:fuzzy l ogic contr oller;genetic algorith m (G A );op ti m izati on;waste water treat m ent1 引 言模糊控制作为智能控制的一个分支,已在很多方面取得了成功应用[1],但是模糊控制中的模糊控制规则、隶属函数,输入输出比例因子等还必须借鉴操作人员或专家的经验来选取[2]。
现有的模糊控制在优化设计时多数采用给定模糊控制规则和隶属函数优化比例因子;或给定模糊控制规则优化隶属函数;或给定隶属函数优化模糊控制规则[325]。
这些方案很难保证给定部分是最优的,难以实现最优控制。
但全部优化涉及的参数又非常多,优化难度很大,目前还没有非常理想的优化方法,这使得模糊控制在一些领域得不到很好的应用。
遗传算法(Genetic A lg orith m ,G A )是一种高效的模拟自然优化工具,易与其他技术结合,常用于智能控制系统中的参数、结构或环境的最优控制[627]。
本文首先对传统遗传算法作适当改进,用来同时优化模糊规则与隶属函数,使模糊控制系统的动、静态性能有较大提高。
最后将优化后的模糊控制器用于污水处理溶解氧的控制中,并进行计算机仿真,实验结果表明该算法能够快速、准确地达到期望的要求。
2 遗传算法优化模糊控制器设计模糊控制器一般由模糊化、模糊知识库、模糊推理机和去模糊4部分组成。
输入变量为误差e 和误差变化率ec,输出变量为实际系统所需要的变量,其控制原理是:首先将实际测得的精确量e 和ec 通过模糊化变换成模糊量,再根据由大量实验数据和专家经验得出的模糊知识库把模糊输入量进行模糊推理得到相应的模糊控制量,经模糊判决将模糊控制量转化为精确控制量输出,从而实现对控制量的控制。
遗传算法具有较强的全局寻优能力,但是不同的遗传策略和操作参数对全局寻优的实现和算法的收敛速度有着很大的影响。
本文对遗传算法进行了合理的改进以提高其运算效率,并利用它从整体上优化模糊控制器的设计,实现了如下几个方面的优化:输入、输出论域模糊划分的优化;输入、输出语言变量模糊子集隶属函数的优化;模糊控制规则前后件的优化。
1)隶属函数的编码形式 根据实际需要本文采用十进制编码来实现隶属函数和模糊控制规则的优化。
可以使系统在不同的输入情况下有着不同控制效果,更好地满足系统在不同阶段的性能要求。
在此基础上,选取三角形底边端点间距离作为优化参数,即对{x 1-0,x 2-x 1,x 3-x 2}进行编码。
在模糊划分条件下,三角形隶属函数的顶点可确定为0,x 1,x 2,x 3。
同时避免了在对0,x 1,x 2,x 3直接编码时,染色体在进行交叉、变异操作后产生大量无效码的弊端。
误差e 编码参数的变化范围可确定为(x 1-0)∈(0,1],(x 2-x 1)∈(x 1,215-x 1],(x 3-x 2)∈(x 2,6-x 2],误差变化率ec 和控制量u 也做同样的要求。
根据以上分析可知,由误差,误差变化率和控制量等组成的待优化隶属函数参数共有9个,它们的隶属函数编码可写为x 1e x 2e x 3e x 1ec x 2ec x 3ec x 1u x 2u x 3u ,其中,前3位是对误差e 的隶属函数编码,中间3位是对误差变化率ec 的隶属函数编码,最后3位是对控制量u 的隶属函数编码。
2)模糊控制规则的编码形式 对于模糊控制规则,同样采用十进制编码,以便和隶属函数一起构成一个完整的染色体。
约定7个整数代表模糊语言变量的7个语言值NB ,NM ,NS,Z,PS,P M ,P B 。
这样就可以方便地把用模糊变量表示的模糊控制表进行数字化,将其表示成元素为实数的二维数组,然后将二维数组拉伸成一维数组,就形成了编码。
对于一个典型的控制规则表,其编码为{0122234012233411233441223445223345523344562344556}。
3)适应度函数的确定 系统综合性能指标的表达形式多种多样,不同的性能指标体现了对系统控制过程的不同要求。
从广义上讲,对于控制系统的要求是系统输出能够及时准确地跟踪控制输入的变化,并且尽可能不受干扰影响。
直观上讲,要求系统的跟踪性好,上升时间短,超调量小,过渡时间短。
然而,这些指标都与系统的瞬态误差相关,在很多情况下难以求出,因而采用如下离散形式的目标函数来估价控制器的性能:J =∑t sk =1αe|e (k )|+αek |ec (k )|+αu |Δu (k )|(1)式中,t s 为控制器作用于对象的持续时间;αe ,αec ,αu 为式中各项的加权系数,分别决定了e (k ),ec (k ),Δu (k )在个体目标函数中所占的比重,其值越大表明对该项的重视程度越高;αec |ec (k )|的引入主要是防止输出响应的超调量过大。
由于遗传算法要求个体适应度越大越优,故需要将目标函数转化为最大值问题后,作为适应度函数,转换函数如下:F (x )=11+J (x )(2)4)模糊控制器参数寻优 将隶属函数的编码和模糊控制规则的编码联合起来,就形成了最终的一维的染色体编码串。
示意如下:x 1e x 2e x 3e x 1ec x 2ec x 3ec x 1u x 2u x 3u 0122234012233411233441223445223345523344562344556该编码串代表了一个完整的模糊控制器的寻优参数。
对于一个二维模糊控制器,3个模糊变量(每个变量取7个语言值)隶属函数的联合编码为9位实数编码,系统最多有7×7=49条规则,控制规则的编码为49位实数编码,故总的编码长度为9+49=58位。
需要注意的是,当用多个字节表示一个基因时,交叉操作时必须在2个基因的分界字节处进行,解码按照3,3,3,49断开解码。
使用遗传算法时,首先需要确定种群规模。
由于改进了初始种群的产生方法,在较小的规模下,也能保证种群的多样性,从而降低了计算负担,提高了遗传算法的效率。
因此,取种群规模为50,个体目标函数中(评价控制器性能)取αe =0135,αec =012,αu =0145。
经过30代得到最优解,最优个体如下:{01668117321987017721032170101842211521745666653366665335554225543211443111133100003310000},个体适应度为6582。
遗传算法计算及实现过程,如图1所示。
图1 遗传算法程序设计图F i g 11GA programm i n g d i a gram3 活性污泥法污水处理参数选取及控制仿 真研究 污水生物处理系统的控制变量即控制系统的输出,包括曝气池中的曝气量、回流污泥比和剩余污泥排放量等;控制参数即控制系统的输入,解决控制问题的关键在于寻找一些既可以在线监测,又可以指示反应进程的控制参数。