基于改进的Harris和SIFT算法的眼底图像拼合
基于改进SIFT特征的双目图像匹配算法
基于改进SIFT特征的双目图像匹配算法王民;刘伟光【摘要】针对SIFT(尺度不变特征变换)算法无法准确定位物体形状特征的问题,提出了一种结合了Harris角点和SIFT算法的立体匹配方法.在DOG尺度空间提取Harris算子作为图像的特征点并为每个特征点定义主方向,计算出特征点的32维特征向量描述子并用BBF算法检索同名特征点之间的欧式距离进行匹配.在降低SIFT 算法的时间复杂度的同时提高了算法提取特征点的形状意义,在双目图像匹配实验中取得了较好的结果.%The SIFT (Scale Invariant Feature Transform) algorithm can not locate the object shape features accurately. To solve the problem, a stereo matching method based on both Harris corner and SIFT algorithm is proposed. The algorithm extracts image feature points using Harris operator and defines the main directions for each feature point. It calculates the 32-dimensional feature vectors of each feature point descriptor and uses Best Bin First (BBF) algorithm to calculate the Euclidean distance to match. The new algorithm reduces the SIFT algorithm' s time complexity and improves the real-time performance. Experimental results of image matching in binocular stereo vision demonstrate that the new algorithm has better performance than previously reported in the literature.【期刊名称】《计算机工程与应用》【年(卷),期】2013(049)002【总页数】4页(P203-206)【关键词】尺度不变特征变换(SIFT)特征点;Harris角点;DOG差分尺度空间;双目视觉【作者】王民;刘伟光【作者单位】西安建筑科技大学信息与控制工程学院,西安710055;西安建筑科技大学信息与控制工程学院,西安710055【正文语种】中文【中图分类】TP391双目图像匹配是双目视觉系统的重要组成部分,是近年来数字图像处理和计算机视觉领域的研究热点。
基于Harris和SIFT的特征匹配算法
价值工程0引言立体匹配是三维重建中一个至关重要且最为复杂的一个环节,按匹配基元的不同,立体匹配可分为区域匹配、特征匹配和相位匹配。
文章重点讨论特征匹配。
目前,根据特征空间,相似性度量,搜索空间和搜索策略的不同,已经形成了许许多多各具特色的特征匹配算法[1~3],但如何合理提取图像的特征点并对其进行高精度匹配,仍然是计算机视觉技术的一个瓶颈,至今还未完全得到解决。
文章提出了一种基于Harris [4]和SIFT [5]的特征匹配算法,算法基于在特征匹配方面取得了显著进展、性能得到了充分肯定的Harris 特征和SIFT特征描述子,对基于尺度不变特征的Harris 角点提取算法提取出的特征点进行SIFT 特征描述,然后利用最近邻欧式距离以及阈值判决来进行双向匹配,能有效解决传统的特征匹配算法对图像尺寸和旋转比较敏感的问题。
1算法基本原理特征匹配实质上就是在一幅图像中给定一点,寻找另一幅图像中的对应点的过程。
其基本步骤就是特征点提取,特征描述以及特征匹配。
算法的基本流程如图1所示,首先用基于尺度不变特征的Harris 特征检测算法提取标准图像和待匹配图像中的特征点,通过改进的SIFT 描述子并利用多维向量对各个特征点进行描述,通过立体视觉理论中的极线约束将匹配特征点的———————————————————————基金项目:国家自然科学基金重大专项项目(90820302);国家博士点基金资助项目(200805330005)。
作者简介:罗桂娥(1962-),女,湖南株洲人,中南大学电子科学与技术研究所,教授,主要研究信息融合技术,数字图像处理,智能仪器开发;李鹏(1983-),男,湖南益阳人,中南大学电子科学与技术研究所,硕士研究生,主要研究数字图像处理。
基于Harris 和SIFT 的特征匹配算法Features Matching Algorithm Based on Harris and SIFT罗桂娥Luo Guie ;李鹏Li Peng(中南大学电子科学与技术研究所,长沙410083)(School of Electronic Science and Technology ,Central South University ,Changsha 410083,China )摘要:为了克服传统的局部特征匹配算法对图像的尺寸和旋转比较敏感的缺点,文章提出了一种基于Harris 和SIFT 的特征匹配算法。
SUFT算法与改进的Harris算法相结合的图像匹配方法
郭 鲁 魏 颖 ( 沈阳工学院, 辽宁 抚顺 1 1 3 1 1 2 )
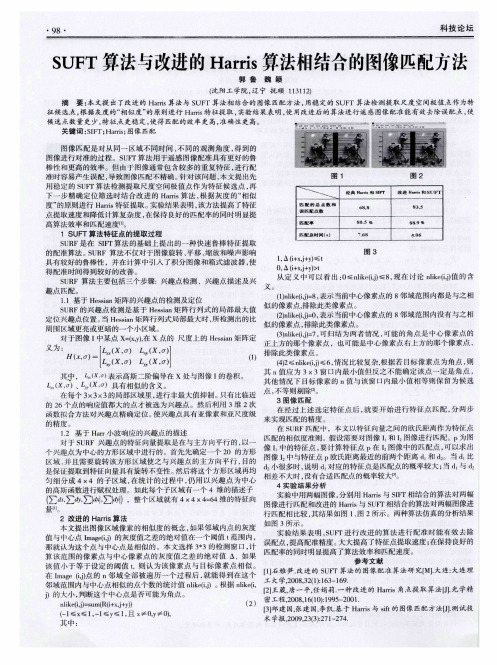
摘 要: 本 文提 出了改进 的 Ha ms 算法与 s uF T算法相 结合的图像 匹配方法 , 用稳 定的 s uF T算法检测提取尺度 空间极值 点作 为特 征候选点 , 根据灰度 的“ 相似 度” 的原则进行 Ha ms 特征提取 , 实验 结果表明 , 使 用改进后 的算法进 行遥感图像 配准能有效去除误配点 , 使 候选点数量更 少, 特征点更稳定 , 使 得 匹 配 的效 率更 高 , 准确性更高。 关键词 : S I F T; Ha ms ; 图像 匹 配 图像 匹配是对从 同一区域不 同时间 、 不 同的观测角度 , 得 到的 图像进行对准 的过程 。S U F F 算法用于遥感 图像配 准具 有更 好的鲁 棒性 和更 高的效率 。但 由于 图像通常包含较 多的重复特征 , 进行 配 图 1 图2 准时容易产生误配 , 导 致图像 匹配不精确 。 针对该 问题 , 本文提出先 用稳定 的 s u F r 算法 检测 提取尺度空 间极 值点作为特征候选 点 , 再 \ \ 妊翦 } I ・ | T ‘ 。和 ¥ 1 1  ̄ 1 g 改进 l - l m - t l m和 SUF T 下一 步精确定位筛 选时结合 改进 的 H a r r i s 算法 , 根 据灰度 的“ 相 似 匹 配 的 总 点 数 和 68 度” 的原则进行 H a r r i s 特征提取 。 实验结果 表明 , 该方法提高了特征 8 83 . 5 误匹鼍点数 点提取速度和降低计算复杂度 , 在保持 良好的匹配率 的同时 明显提 匹配睾 8 0 . S % 8 89% 高算法效率和匹配速度l 】 1 。 1 S UF T算法特征点的提取过 程 匹配总时间( s ) . 6 8 5 . 0 6 S U R F是在 S I F T算法的基础上提 出的一种快速鲁 棒特征提取 图 3 的配准算法。S U R F算法不仅对于图像旋 转 、 平移 、 缩放 和噪声影响 1 , △( i + x , j + y ) ≤t 具有较好的鲁棒性 ,并在计算中引入 了积分 图像和箱式滤波 器 , 使 0 , △( i + x + y ) > t 得配准时间得到较好的改善。 从定 义中可 以看 出 : 0 ≤n l i k e ( i , j ) ≤8 , 现 在 讨论 n l i k e ( i . j ) 值的 含 S U R F 算法 主要包括 三个 步骤 : 兴趣点检测 、兴趣点描述及兴 义。 趣 点匹配。 ( 1 ) n l i k e ( i . j ) = 8 , 表示 当前 中心像素点 的 8邻域范围 内都是与之相 1 . 1基 于 H e s s i a n矩 阵 的 兴趣 点 的检 测 及 定 位 似的像 素点, 排除此类像素点 。 S U R F的兴趣 点检测是基 于 H e s s i a n矩 阵行 列式的局部最 大值 ( 2 ) n l i k e ( i , j ) = 0 , 表示 当前 中心像素点的 8邻域范围 内没有与之相 定 位兴趣点位 置。 当H e s s i a n矩阵行列式局部最大时 , 所检测 出的 比 似的像素点 , 排除此类像 素点 。 周围区域更亮或 更暗的一个小 区域 。 ( 3 ) n l i k e ( i . j ) = 7 , 可归结 为两 者情 况 , 可能 的角 点是 中心像 素点的 对于图像 I 中某点 x = ( x , y ) , 在 x点 的 尺度上 的 H e s s i a n矩阵定 正上方的那个像素点 ,也可能是 中心像素点 右上方 的那 个像 素点 , 义 : I t ( x, ) L ( x, 盯 ) l 排除此类像素点 。 【 盯 ) } £ , ( x , ) L ( x , ) l ( 1 ) ( 4 ) 2 ≤n l i k e ( i , J ) ≤6 , 情况 比较 复杂, 根据若 目标 像素点为角点 , 则 其 n值应为 3×3窗 口内最小 值但 反之不能确 定该点一定是 角点 , 其L 中, k( , ) 表示高斯二阶偏导在 x处与图像 I 的卷积。 其他 情况下 目标像 素的 n值与该窗 口内最小值相 等则保 留为候 选 k( x , 口 )、 ( X, 具有相似的含义。 点, 不等则剔 除[ 2 1 。 在每个 3 x 3 × 3的局部 区域里 , 进行非最 大值 抑制 。 只有 比临近 3图像 匹配 的2 6个点的响应 值都 大的点才被选为兴趣点 。然后利用 3 维 2次 在 经过上述选 定特征点 后 , 就 要 开 始 进 行 特 征点 匹 配 , 分 两 步 函数拟合方法对兴趣点精确定位 。 使兴趣点具有亚像素和亚尺度级 来实现匹配的精度 。 的精 度 。 在S U R F匹配中 ,本文以特征 向量之间 的欧 氏距离作为特征点 1 . 2 基 于 Ha r r 小 波 响应 的 兴趣 点 的描 述 匹配 的相似度准则 。假设需要对图像 I 和I : 图像进行 匹配 。P为图 对于S U R F兴趣点 的特征向量提取是在与主方向平行的 , 以一 像I 中的特征点 , 要计算 特征点 P在 I : 图像 中的匹配点 , 可以求出 个兴趣点为 中心的方形区域中进行 的。首先先确定一个 2 0 的方形 图像 I 。 中与特征点 P欧 氏距离最近的前两个距离 d 。 和d 。 。当 d 。 比 区域 , 并 且需要旋 转该方形 区域使之与兴趣 点的主方 向平行 , 目的 d 小很多时 , 说明d , 对应 的特征点是 匹配点 的概 率较大 ; 当d 。 与d : 是保证提取到特征 向量具有旋转不变性 。 然后将这个方 形区域再均 相差 不大时 , 没有合适 匹配点的概率较大 。 匀细 分成 4 X4 的子 区域 , 在统 计的过程 中 , 仍 用 以兴趣点 为 中心 4实 验 结 果 分 析 的 高 斯 函数 进 行 赋 权 处 理 。如 此 每 个 子 区域 有 一 个 4 维 的描 述 子 实验 中用两幅图像 , 分别用 H a r r i s 与S I F T相结 合的算法 对两幅 ( ∑d x , ∑ , ∑I d x l , ∑I + 1 ) , 整个区域就有4 × 4 X 4 = 6 4 维的 特征向 图像进行匹配和改进的 H a r i r s 与S U F T相结合 的算法对两幅图像进 量【 “ 。 行匹配相 比较 , 其结果如图 1 、 图 2所示 。两种算法仿真的分析结 果 2 改进 的 H a r r i s 算法 如图 3所示。 本文提出图像区域像 素的相似度的概念 , 如果 邻域 内点的灰度 实验结 果表明 , S U F T进 行 改 进 的 算 法 进 行 配 准 时 能 有 效 去 除 值与中心点 I m a g e ( i , i )的灰度值之差的绝对值在一个阈值 t 范围内 , 误配点 , 提高配准精度 。 大大提高 了特征点 提取速度 ; 在保持 良好 的 那就认为这个点 与中心点 是相似的 。本文选择 3 * 3的检测 窗 口, 计 匹配率的同时明显提高 了算法效率和匹配速度。 算该范 围的像 素点与 中心像 素点 的灰 度值之差 的绝对值 △,如果 参 考 文 献 该 值小 于等于设 定的 阈值 t ,则认 为该像 素点与 目标 像素点 相似 。 【 1 ] 石雅笋. 改进 的 s u K r 算 法的 图像 配准算 法研 究【 M】 . 大连: 大连理 在I m a g e( i , j ) 点的 n 邻 域全部被 遍历一个 过程后 , 就能得到在 这个 z -  ̄ k 学, 2 0 0 8 , 3 2 ( 1 ) : 1 6 3 — 1 6 9 . 邻 域范围内与中心点相似 的点个数 的统计值 n l i k e ( i , J )。 根据 n l i k e ( i , [ 2 1 - - * - - 葳, 唐一 平, 任娟 莉. 一种 改进 的 H a r r i s角点提取 算法【 J ] . 光学精 j )的 大 小 , 判 断 这 个 中心 点 是 否 可 能 为 角 点 。 密工 程 , 2 0 0 8 . 1 6 ( 1 0 ) : 1 9 9 5 — 2 0 0 1 . n l i k e ( i , j ) = s u m ( R ( i + x , j + y ) ) ( 2 ) f 3 】 邱建 国, 张建 国, 李凯. 基 于 Ha r i r s 与s i t的图像 匹配方法[ f J 1 . 测试技 ( 一 1 ≤x ≤1 , - 1 ≤y ≤1 , 且X ≠0 , y ≠o ) , 术 学报 , 2 0 0 9 , 2 3 ( 3 ) : 2 7 1 — 2 7 4 . 其 中:
基于Harris和最佳缝合线的图像拼接算法
基于Harris和最佳缝合线的图像拼接算法摘要:图像拼接是图像处理技术的一个重要内容,是一种将多张有衔接重叠的图像拼成一张高分辨率图像的技术。
该技术广泛应用于显微图像分析、数字视频、运动分析、医学图像处理、虚拟现实技术和遥感图像处理等领域[1]。
本次方法探究是为满足不同形态的工件图像拼接要求,得到拼接影像量测工件尺寸,从而对图像拼接技术做深入探究,提出基于棋盘格标定板角点检测图像拼接的处理方法。
探究基于棋盘格标定板角点特征的图像拼接技术,利用RANSAC算法提高关键点匹配度,然后为消除拍摄角度产生的尺寸误差,对拍摄的图像进行透视变换,最后基于C++编程实验实现透视变换后两张图像拼接过程,实验结果证明了拼接方法的可行性及有效性。
关键词:特征检测匹配;RANSAC;最佳缝合线图像拼接;透视变换;0引言图像拼接是一个日益流行的研究领域,它已经成为照相绘图学、计算机视觉、图像处理和计算机图形学研究中的热点话题。
图像拼接所要解决的问题一般表现为通过对齐一系列的空间重叠图像构造一个无缝的高清晰度的图像,它具有比单个图像更高的分辨率和更大的视野[2]。
对于这些有重叠部分的图像,一边通过两种方法获得:一种是固定照相机的转轴,然后绕轴旋转所拍摄的照片;另一种是固定照相机的光心,水平摇动镜头所拍摄的照片[3]。
其中前者主要是用于远景或遥感图像的获取,后者主要用于显微图像的获取还有一种方法是针对于工件测量的拍摄方式,将相机放于工件上方水平移动拍摄,将拍摄的照片拼接起来。
它们共同的特点都是获得二维图像,但通常由于机械或者场景的不理想导致各衔接图像不能完全匹配,因此这给拼接图像环节带来了严重问题。
为此,本文就图像拼接出现的严重问题,为了满足不同形态的工件图像拼接要求,提高拼接的精度,提出一种基于棋盘格标定板角点检测特征匹配的拼接方法。
1 工件图像特征点检测完成高分辨率图像拼接的第一步是选择准确度较高的图片配准方法,这样才能找出图片中的关键点(即特征点)[4]。
结合 Harris 与 SIFT 算子的图像快速配准算法
结合 Harris 与 SIFT 算子的图像快速配准算法佚名【摘要】本文提出了一种结合Harris与SIFT算子的快速图像配准方法。
首先,对Harris算法进行两方面的改进:一是构建高斯尺度空间,提取具有尺度不变性的角点特征;二是采用Forsnter算子对提取的角点精定位,提高配准精度。
然后,利用SIFT算子的特征描述方法描述提取到的特征点,通过随机kd 树算法对两幅影像的特征点进行匹配。
最后采用RANSAC算法对匹配点对进行提纯,并通过最小二乘法估计两幅影像间的空间变换单应矩阵,完成图像配准。
实验结果表明:本文方法在基本保持配准精度的同时,在配准过程的时间消耗上比标准SIFT算法减少了64%。
%A new method for fast image registration based on improved Harris-Sift algorithm is proposed .First-ly, classic Harris algorithm is improved by building Gaussian scale space to extract scale invariant Harris cor -ners and they are refined to sub-pixel corners using Forsnter algorithm .Then the SIFT descriptor is utilized to characterize those feature points and the matching procedure is carried out via randomized kdtrees .At last, RANSAC is used to remove wrong matches and the optimal transform parameters are estimated using the least square method to accomplish the image registration process .The experimental results demonstrate that com-pared with the classic SIFT algorithm the proposed method decreases the cost time of the registration procedure mostly by 64%while almost keeping the same performance .【期刊名称】《中国光学》【年(卷),期】2015(000)004【总页数】8页(P574-581)【关键词】图像配准;多尺度Harris算子;SIFT;RANSAC【正文语种】中文【中图分类】TP391图像配准是图像处理领域的一个重要应用技术,在计算机视觉、侦察与测绘、医学图像分析等方面具有广泛的应用价值。
一种基于改进sift算法的高效图像匹配方法

一种基于改进sift算法的高效图像匹配方法专利名称:一种基于改进sift算法的高效图像匹配方法技术领域:本发明涉及一种图像匹配的方法,属于图像处理技术领域。
背景技术:图像匹配是指同一场景在两个不同时点下图像之间的对应关系,它是计算机视觉研究领域的一个基本问题,也是计算机视觉应用,如深度恢复、摄像机标定、运动分析以及三维重构等问题的研究起点或基础。
在特征匹配法中,如今运用最多的是点特征。
现在常见的特征点提取算法包括 Harris算子、ForIstner 算子、SIFT算法和基于小波变换的边缘点提取法。
其中SIFT 算法以其独特的优势,成为目前最为稳定的一种算法。
SIFT(Scale Invariant Feature Transform)算法即尺度不变特征变换算法,是David G. Lowe在1999年提出的一种基于尺度空间的、对图像缩放、旋转甚至仿射变换保持不变性的图像局部特征描述算子,SIFT将一幅图像映射(变换)为一个局部特征向量集,特征向量具有平移、缩放、旋转不变性,同时对光照变化、仿射及投影变换也有一定的不变性。
SIFT特征向量的生成由以下四个步骤组成I、在尺度空间中检测极值点;2、去除低对比度的极值点和不稳定的边缘极值点,得到特征点;3、计算特征点的方向参数;4、生成SIFT特征点向量,向量维数一般为128维。
运用SIFT算法提取的SIFT特征向量具有如下优点I、SIFT特征是图像的局部特征,对其旋转、尺度缩放、亮度变化保持不变性,对视角变化、仿射变换等保持一定程度的稳定性;2、独特性好,信息量丰富,使用于在海量特征数据库中进行快速、准确的匹配;3、多量性,即使少数的几个物体也可以产生大量SIFT 特征向量;4、可扩展性,可以很方便地与其他形式的特征向量进行联合。
尽管SIFT提取的特征点稳定,但SIFT算法缺点也很多,如算法复杂度较高,计算数据量大,耗时较长。
研究人员针对以上的缺点采取了许多改进措施,Yanke 等人提出了 PCA-SIFT方法[1],目的是对特征描述进行数据降维,虽使匹配速度加快,但是由于没有任何先验知识做基础,这种方法反而使计算量增加;Grabner等人用积分图像方法[2],使SIFT的计算速度提高了,但是降低了SIFT方法的优越性。
SIFT结合改进的Harris的图像匹配方法_唐坚刚
为寻找极值点, 需要把每一个采样点与其所有领域点进行 比较, 如图 4 所示, 中间检测点与其同尺度的 8 个像素点以及上 下相邻尺度的 9 × 2 个像素点进行比较, 当且仅当它比所有点都 大或都小时才会作为一个局部极值点并记下相应位置和尺度 。
Abstract
In order to improve the speed and accuracy of image matching further,this paper puts forward an image matching method of
SIFT combining with the improved Harris, which makes its number of candidate points less, more stable of the feature point and more efficient of matching. Firstly,the stable SIFT algorithm is used to detect and extract the extreme value point of scale space as the characteristic candidate points,the next step is to combine the improved Harris algorithm while precisely locating and screening,and to process the Harris feature extraction according to the principle of the " similarity" of the gray. Experimental results show that this method greatly increases the speed of characteristic point extraction and reduces the computational complexity. While keeping a good matching rate,it obviously improves the algorithm efficiency and matching speed. Keywords SIFT Harris Similarity Image matching SIFT 算子提取极值点作为特征候选点; 再根据 SIFT 是基于特征
基于改进SIFT特征和图转换匹配的图像匹配算法_张官亮

Abstract: As the SIFT operator might extract more false keypoints in the image with various texture,which would affect the result of image matching,this paper proposed a new algorithm of image matching based on SIFT local invariant feature of Harris threshold criterion. On the basis of extracting SIFT invariant features,the extracted invariant feature was selected based on Harris threshold criterion. Therefore,there leaved some more robust and well separable features because the worse separable features were rejected in some region of closegrained image. Finally,it used the vector of invariant feature and graph transformation matching method to match accurately. The experimental results demonstrate that the image matching is high efficiency and robust if it combines stable features with a better matching strategy. Key words: image matching; feature point extraction; scale invariant feature transform ( SIFT ) feature; DOG scalespace; Harris threshold criterion; autocorrelation matrix; graph transformation matching ( GTM)
基于改进SIFT算法的图像匹配方法

2020年第39卷第10期传感器与微系统(Transducer and Microsyslem Technologies)45DOI:10.13873/J.1000-9787(2020)10-0045-03基于改进SIFT算法的图像匹配方法**收稿日期=2019-06-26*基金项目:国家自然科学基金资助项目(51575236)丁苏楠,张秋菊(江南大学机械工程学院,江苏无锡214000)摘要:针对尺度不变特征变换(SIFT)算法中128维的高维度特征描述符导致耗时长,实时性差的问题,首先提出了一种非线性的基于局部线性嵌入(LLE)法的降维方法,尽可能地保留原数据空间中的非线性信息,缩短算法运行时间,提高匹配精度。
其次,针对匹配过程中使用欧氏距离计算量大的问题,提岀使用曼哈顿距离计算参考图与待匹配图的相似度,进一步减少算法所耗时间。
实验结果表明,该算法在具有较高匹配率的同时,提高了匹配速度。
关键词:尺度不变特征变换(SIFT);局部线性嵌入法;MATLAB;图像匹配中图分类号:TP391.41文献标识码:A文章编号:1000-9787(2020)10-0045-03Image registration method based on improved SIFT algorithm*DING Sunan,ZHANG Qiuju(College of Mechanical Engineering,Jiangnan University,Wuxi214000,China)Abstract:Aiming at the problem that the128-dimensional feature descriptors in scale-invariant feature transform(SIFT)algorithm results in long time-consuming and poor real-time performance,an nonlinear improved SIFTalgorithm based on local linear embedding(LLE)is proposed, it is possible to presence nonlinear information in theoriginal data space,shorten the mnning time of the algorithm,and improve the matching precision.Secondly,aiming at the problem of large calculation quantity of Euclidean distance in the registration process,use theManhattan distance to calculate the similarity between reference map and the image to be matched to furtherreduce the time spent by the algorithm.The experimental results show that the algorithm has high matching speed,while has high matching rate・Keywords:scale・invariant feature transform(SIFT);local linear embedding(LLE);MATLAB;image registration0引言图像匹配⑴是指在若干图片中寻找与模板图相一致的图片或在某张图片中寻找与模板图中相一致的部分,在计算机视觉、智能机器人、医疗等领域有普遍的应用⑵。
一种改进Harris-SIFT算子的图像匹配算法
Vol. 37 No4332舰船电子工程Ship Electronic Engineering总第274期2017年第4期—种改进H arris*I F T算子的图像匹配算法李兰谢勤岚(中南民族大学生物医学工程学院武汉430074)摘要S IF T特征是一种性能良好的检测局部的特征,被广泛应用于图像匹配。
针对S IF T算法的数据处理量大、运 行速度慢、时间复杂度高等问题,提出了一种基于角点精确定位、降低特征维度、增强近似最近邻匹配法的改进算法。
实验 的结果证明,改进后的算法提高了算法的运行速度和匹配精确度。
关键词SIFT; H a m s;图像匹配中图分类号TP391 D O I10. 3969/j. issa 1672-9730. 2017. 04. 009An Improved Image Matching Algorithm Based on Harris-SIFTLILan XIEQinlan(College of Biomedical Engineering, South-Central University for Nationalities,Wuhan 430074)Abstract SIFT features are a kind of local features w ith high performance,which are applied widely in the image matching field. However,there are some disadvantages about SIFT algorithm,such as,a large volume of running speed , high time complexity and so on Based on these disadvantages,the paper proposes an improved image matching algorithm based on Harris and SIFT. Experimental results prove that the improved algorithm has higher matching accuracy and less matching time.Key Words S IF T,H arris,image matchingClass Number TP3911引言图像匹配是利用图像处理方法将两幅图像相 同的区域进行匹配[1],它是图像处理领域的一个重 要应用技术,在计算机视觉、医学图像分析、模式识 别等多方面都有着广泛的应用价值。
基于改进Harris角点检测的视网膜图像配准

基于改进Harris角点检测的视网膜图像配准汪立;蒋念平【摘要】基于Harris角点的视网膜图像配准中,Harris角点检测算法无法针对不同的图像设定通用的阈值,检测到的角点也可能存在过多过密的问题.针对这些问题,提出一种改进的Harris角点检测算法,利用角点响应函数的均值来得到自适应阈值,并通过自动控制高斯模糊窗口大小,使角点数量在合理的范围.该算法采用Matlab语言来编程实现.实验结果表明,该方法能较好地配准各种视网膜图像,配准速度约为通用双引导就近点搜索算法的51%.【期刊名称】《电子科技》【年(卷),期】2017(030)002【总页数】4页(P119-122)【关键词】Harris角点;视网膜图像;局部特征;配准;Matlab【作者】汪立;蒋念平【作者单位】上海理工大学光电信息与计算机工程学院,上海200093;上海理工大学光电信息与计算机工程学院,上海200093【正文语种】中文【中图分类】TP391.41视网膜图像配准是将不同时间、不同成像设备或不同条件下获取的两幅或多幅视网膜图像进行空间对齐的过程。
通过对视网膜图像进行配准,眼科医生能够更好的诊断各种眼科疾病,如老年黄斑变性,青光眼[1]等。
视网膜图像配准的方法可以分为基于区域匹配和基于特征匹配的方法[2-3]。
基于特征匹配的方法由于操作简单、配准速度较快、精度较高,是目前应用较多的配准方法。
特征检测是基于视网膜图像匹配的第一步,也是一个重要环节。
以往大多使用视网膜血管节点作为图像的特征点[4],但由于各种眼科疾病对视网膜的影响,使得需要配准的视网膜图像血管模糊,很难提取足够多的血管节点,从而使配准不成功。
Harris角点检测算子是一种常用的特征点检测算子,具有很好的旋转不变性,同时对亮度和对比度的变化也不敏感,文中选用其检测的角点来代替血管节点作为特征点,不仅可检测到更多的特征点,且检测到的特征点较为稳定。
但Harris角点检测需要手动设定一个阈值,该阈值大小对角点检测结果影响较大。
一种改进的Harris角点检测的图像配准方法
一种改进的Harris角点检测的图像配准方法张见双;张红民;罗永涛;陈柏元【摘要】In traditional Harris corner detection process,manual input of single threshold may lead to corner cluster, false corners and so on.To solve this problem,an image registration method based on improved Harris corner detection algorithm was proposed.Firstly,the image was divided into 3 ×3 sub images.According to the contrast of each sub im-age,the threshold value of each sub image was set.Then,the detected Harris corners were roughly matched by NCC algorithm.Finally,the error matching corners in rough matching were removed by RANSAC algorithm.The experimen-tal results show that corner distribution of the algorithm is more uniform,and the algorithm can effectively increase the number of image matching points in image registration and has a good practicability.%针对在传统的Harris角点检测过程中,手动输入单个阈值可能出现角点聚簇、伪角点等现象,提出了一种改进的Harris角点检测方法的图像配准方法.首先,将图像分割成3×3个无重叠子图,根据每个子图的对比度的大小,来设置每个子图的阈值.然后,采用NCC算法对检测出的角点进行粗匹配.最后,采用RANSAC 算法对粗匹配中误匹配点对进行剔除.实验表明:该算法使得检测的角点分布比较均匀,并在图像配准中有效地增加图像匹配点对数,具有良好的实用性.【期刊名称】《激光与红外》【年(卷),期】2017(047)002【总页数】4页(P230-233)【关键词】Harris角点;图像配准;NCC;RANSAC【作者】张见双;张红民;罗永涛;陈柏元【作者单位】重庆理工大学电子信息与自动化学院,重庆 400054;重庆理工大学电子信息与自动化学院,重庆 400054;重庆理工大学电子信息与自动化学院,重庆400054;重庆理工大学电子信息与自动化学院,重庆 400054【正文语种】中文【中图分类】TP391.41图像配准一直以来在计算机视觉、视频监控、医学图像分析、军事侦察,遥感图像处理等领域有着广泛的作用。
结合Harris-Laplace与SIFT特征的无人机倾斜影像拼接

结合Harris-Laplace与SIFT特征的无人机倾斜影像拼接陈庆飞【摘要】针对无人机影像存在仿射变形与阴影问题,本文提出应用Harris-Laplace 与SIFT特征的倾斜无人机影像匹配方法.首先,提取具有光照、影像噪声、尺度不变性的Harris-Laplace关键点,并计算关键点的主方向,生成特征点;然后采用SIFT特征描述子对第一步提取的特征点进行表达;最后,采用BBF方法提取初始匹配点对和最小二乘法约束的均方根误差(RMSE)剔除.实验结果表明,该算法在存在仿射变形、高大建筑物阴影的影像匹配表现较好的结果.【期刊名称】《北京测绘》【年(卷),期】2018(032)007【总页数】4页(P819-822)【关键词】Harris-Laplace特征;尺度不变特征转换;最佳桶优先;均方根误差;影像拼接【作者】陈庆飞【作者单位】东莞市海洋与渔业环境监测站,广东东莞 512100【正文语种】中文【中图分类】P2310 引言图像拼接技术[1]将一组具有互相重叠的影像进行几何匹配对准,再对影像进行重采样将各影像序列信息融合生成一幅视角场景较宽更好理解的新影像。
影像拼接技术在无人机影像处理、环境监测、医学成像、地质灾害监测技术等众多领域有着广泛的应用价值 [2]。
无人机在获取倾斜影像过程中由于受大气因素影响较小,操作简单、影像空间分辨率高机动性强等优点,可以弥补航空摄影以及卫星影像的不足。
但由于无人机影像飞行高度与数码相机视场角的限制,单幅影像覆盖的地表区域有限,难以有效地覆盖目标区域。
为了增强影像的可用性需要扩大影像的视场范围,需要采用影像拼接技术将在不同角度、时间、传感器拍摄获取具有一定重叠区域的多张单幅影像进行无缝拼接,生成一幅满足一定要求的新影像。
针对无人机影像拼接过程中的问题,国内外学者从影像匹配与拼接方法两个方面进行研究,如刘玉轩、蓝朝桢等改进SIFT匹配算法,通过划分格网实现影像上Harris兴趣点的均匀分布,提高无人机影像匹配的精度与算法效率[3];肖汉、张祖勋等通过高性能地GPGPU并行算法完成影像匹配[4];Montoliu,R等提出粗匹配和精匹配两个阶段,首先采用SIFT算法进行初始匹配消除影像明显的几何变形,然后采用最小二乘算法提高匹配点的定位精度,实现高精度的影像匹配[5]。
基于Harris算子的图像拼接高精度检测技术
基于Harris算子的图像拼接高精度检测技术
梅杨杨;谢海明;韩露;郭世俊
【期刊名称】《光学仪器》
【年(卷),期】2010(032)001
【摘要】针对医疗器械要求高精度检测的特点,提出了采用图像拼接对器械进行检测的方法,通过Harris算子精确提取图像中的特征点进行图像拼接,不但极大提高了拼接精度以及精密医疗器械的检测精度,而且增加图像分辨力与成像范围.拼接精度是检测精度的保证,基于Harris算子的拼接图像可实现微米级高精度检测.通过该方法进行图像拼接并测量其精度,测试精度与单幅图像相比明显提高,结果完全符合器械检测要求.基于拼接的精密仪器测量是一种提高测量精度的新方法,这方面的研究必将推动机器视觉技术的进一步发展.
【总页数】4页(P9-12)
【作者】梅杨杨;谢海明;韩露;郭世俊
【作者单位】上海理工大学,医疗器械与食品学院,上海,200093;上海理工大学,医疗器械与食品学院,上海,200093;上海理工大学,医疗器械与食品学院,上海,200093;上海理工大学,医疗器械与食品学院,上海,200093
【正文语种】中文
【中图分类】TP391.4
【相关文献】
1.基于改进Harris的图像拼接算法 [J], 李鹏程;曾毓敏;张梦
2.一种改进的基于Harris角点的图像拼接方法 [J], 张宇驰
3.基于Harris角点的图像拼接技术研究 [J], 张维;张晶晶
4.基于改进Harris算法的全自动无缝图像拼接 [J], 霍东旭;朱朦;任洪娥
5.基于Canny边缘检测和Harris角点检测的图像拼接方法 [J], 王玉凡
因版权原因,仅展示原文概要,查看原文内容请购买。
一种改进的医学图像深度信息恢复算法
一种改进的医学图像深度信息恢复算法郭姝言;刘桥;卢进【摘要】针对医学图像深度信息恢复的实时性问题, 提出了一种Harris角点检测与SIFT特征点检测相结合的算法, 提取医学图像的特征点, 采用欧式距离作为相似性判定准则将特征点进行匹配, 克服了传统SIFT算法提取特征点过多、耗时长的问题. 并对获得较致密的视差图, 运用三角测量的方法恢复医学图像的深度信息. 实验结果表明,文中所提算法在缩短了医学图像深度信息恢复的时间的同时提高了精度, 验证了该算法的有效性.%A Harris-SIFT algorithm is proposed to extract the medical image feature points at first for real -time medical image depth information recovery .The Euclidean distance is used as the similarity criterion for matching the feature points .This matching algorithm reduces the feature points and time consumption of SIFT extraction . The denser disparity maps are processed by the triangulation method to recover the depth information of medical image . The experimental result shows that the proposed algorithm effectively reduces the medical image depth information re -covery time and improves the accuracy .【期刊名称】《电子科技》【年(卷),期】2016(029)001【总页数】4页(P48-50,55)【关键词】双目立体视觉;Harris;SIFT;图像匹配;深度信息恢复【作者】郭姝言;刘桥;卢进【作者单位】长沙理工大学电气与信息工程学院,湖南长沙 410114;长沙理工大学电气与信息工程学院,湖南长沙 410114;长沙理工大学电气与信息工程学院,湖南长沙 410114【正文语种】中文【中图分类】TP391.41Abstract A Harris-SIFT algorithm is proposed to extract the medical image feature points at first for real-time medical image depth information recovery.The Euclidean distance is used as the similarity criterion for matching the feature points.This matching algorithm reduces the feature points and time consumption of SIFT extraction.The denser disparity maps are processed by the triangulation method to recover the depth information of medical image.The experimental result shows that the proposed algorithm effectively reduces the medical image depth information recovery time and improves the accuracy.Keywords binocular stereo vision;Harris;SIFT;image matching;depth information recovering视觉是人类观察和感知世界的一种重要手段,双目立体视觉的研究目标就是使机器人具备通过几幅图片来认知周围环境的能力,从二维图像中感知、获得三维世界的信息,目前已被广泛应用于遥感图像分析、道路跟踪、特定目标识别、医学图像处理、多媒体技术等方面。
一种改进 Harris 角点与 SIFT 的图像拼接技术
一种改进 Harris 角点与 SIFT 的图像拼接技术龚伦;刘璨;胡均谱【期刊名称】《计算机与数字工程》【年(卷),期】2015(000)011【摘要】In view of the SIFT feature vector detection efficiency is nothigh ,false matching points equivalence prob-lems ,in this paper ,in combination with the advantage of Harris corner detection ,a new feature point detection method —Harris_SIFT feature[1] point detection is proposed .Firstly ,lead cross matching algorithm is used to coarse matching of fea-ture points ,then improved random consistency algorithm[4] (RERANSAC[9] ) and nonlinear minimization iterative algorithm (LM ) are introducted to calculate the precise and stable transformation matrix ,then KLT algorithm for matching point in the video tracking is combined with to offset correction ,finally the image is mixed by using wavelet transform .%针对 SIFT 特征向量检测效率不高、存在误匹配点对等问题,论文在结合其与 Harris 角点检测优点的基础上提出了一种新的特征点检测方法——— Harris_SIFT 特征点检测。
基于快速视网膜关键点算法改进的图像匹配方法
基于快速视网膜关键点算法改进的图像匹配方法付偲;邓丽;卢根;费敏锐【摘要】传统的仿射尺度不变特征(ASIFT)算法通过模拟仿射变化图像实现完全仿射不变性,但是由于尺度不变特征(SIFT)算法本身的低效造成ASIFT的过程非常耗时,为了实现更为高效的图像匹配,引入快速视网膜关键点(FREAK)算法到ASIFT仿射模型中,并基于Lanczos-4插值进行改进。
在匹配过程中基于HAMMING距离实现暴力匹配,并结合随机样本一致性(RANSAC)算法改进对匹配点对的提纯,得到了新的AFREAK算法。
该算法既能实现完全仿射不变性,又能实现低耗时和低内存占用。
实验结果表明,提出的AFREAK算法处理速度上快于ASIFT近2~3倍,并且可以得到与之相似的匹配效果。
%Conventional Affine Scale Invariant Features(ASIFT)algorithm implements full affine invariance by simulating image with affine transformation. To solve the problem of time-consuming implements caused by low efficiency of SIFT algorithm and implement more efficient image matching, Fast Retina Keypoint(FREAK)is introduced to the affine model of ASIFT with improvements based on Lanczos-4 interpolation. With the implementation of Brute Force feature matching based on HAMMING distance and improvement of matching points pairs filtration combined with Random Sample Con-sensus(RANSAC), the new algorithm AFREAK is obtained, which implements full affine invariance with low consuming and memory usage. Experimental results show that the speed of proposed algorithm is almost 2 to 3 times faster than the original ASIFT algorithm with the similar matching effect.【期刊名称】《计算机工程与应用》【年(卷),期】2016(052)019【总页数】5页(P208-212)【关键词】尺度不变特征(SIFT);仿射尺度不变特征(ASIFT);快速视网膜关键点算法(FREAK);仿射不变;图像匹配【作者】付偲;邓丽;卢根;费敏锐【作者单位】上海大学机电工程与自动化学院,上海 200072; 上海市电站自动化技术重点实验室,上海 200072;上海大学机电工程与自动化学院,上海 200072; 上海市电站自动化技术重点实验室,上海 200072;上海大学机电工程与自动化学院,上海 200072; 上海市电站自动化技术重点实验室,上海 200072;上海大学机电工程与自动化学院,上海 200072; 上海市电站自动化技术重点实验室,上海200072【正文语种】中文【中图分类】TP273FU Cai,DENG Li,LU Gen,et al.Computer Engineering and Applications,2016,52(19):208-212.基于局部特征的图像匹配在图像拼接、目标检测等领域有着广泛应用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
0 引 言
眼底 图像丰 富的血 管和纹理 结构 ,对 于 眼底小 疣 、黄
T Ao h-a g Z i n ,HUANG a j i Hu
( c o lo e tia gn eig a d I fr to S h o fElcrc l En ie rn n n omain,Sc u n Unv r i ,C e g u 6 0 6 ,C ia ih a iest y h n d 1 0 5 hn ) Abtat sr c :On tetaio a wa s gt eSF ag r h ,t ecmp tt ni h aywhl wi a cu ay h rdt n l yui I T o tm h o uai ev i t b dac rc.Har g r h sd i n h l i o s e h ri a oi sl t i u e m s
R — d tM )一 是 ta e M ) e( (r c ( ) () 1
1 Har 角点 检测算 法 和 SFF算法简 介 ri s I
1 1 H ri 角点 检 测 算 法 . ar s
特征点 的提取 直接 关系 到图像 配准 的效 果 ,角 点作 为
收 稿 日期 :2 1 —01 ;修 订 日期 :2 1—21 0 11—2 0 11 —6
21 年 9 02 月
计 算机 工程 与设 计
COM P UTER NGI E NEERI NG AND DES GN I
S p. 0 2 e t 2 1
第3卷 3
第9 期
Vo . 3 No 9 13 .
基 于 改 进 的 Har 和 SF ri s I T算 法 的眼 底 图像 拼 合
这 些 采 样 点 分 成 4组 ,对 每 组 中 的 1 6个 采 样 点 进 行 模 加
e -u 。 (z’ /
,
一… 轰 (
E( , x )一 [ , 3 x,3 z y ME y
——高斯窗平滑函数,一般为 W ( ,口 “ )一 矩阵 M-一 目标像 素点的 自相关 矩阵 ,具有两 _ 个 特征值 和 ,同局部 自相 关 矩阵 M 的 曲率 成 正 比。 因此 可以得 到 Har 角点的响应 函数为 ri s
泰 勒 展 式 为
尺度不变特 征 变换 (cl i ai tfauetaso1, sae n r n etr rnfFI v a T SF )算法 ] IT ,是一种基于尺度空间 ,具有图像缩放 、旋 转和仿变换不变性 的特征点 目标识 别和 图像匹 配算法 。它 使用高斯差分尺度空间检测方法来得 到尺度不变 的特 征点 ,
征点 ,而且 D G算 子计算 简单 ,可 以用归一 化 的 L G算 O O 子进行 近似
D( Y, x, )一 ( , k G( Y,3)一 G( Y,3 )*I x, x, k ) ( )
一
为 了使算子具备 旋转不 变性 ,可 以利用 特征 点的领 域
像素梯度方 向分 布特性 ,制定特 征点 的主方 向 。高斯 空间
t iu eo t h o n r ,whc a y i l e r sn h iu e h r ce i i Th of r u eC r e s g t i h c n tp c l r p e e tt e f r ' c a a t r t . e i r v d Ha r s c mbn d wi I T lo ay g s sc mp o e ri i o ie t S F ag — s h rt m ,t eCo esi fr t ni iu e u t r u hHa r ,a dt et o u h I T c r e p n i gd s r t r , i l v ro n h i h h m r n o ma i sf r dO t h o g o g ri s n h o kO tt eS F o rs o dn e c p o s wh eo e c migt e i e r r d y t el c l r de tic n itn eo l mo a i g ,a d a he e l mo a e ut tlw mp tt n ro sma eb h o a a in o s e c fmut d l ma e n c v d wel s i rs lsa g n s i i c o c o u ai . o
陶治 江 ,黄 华
( 四川 大学 电气信 息 学院 ,四川 成都 6 0 6 ) 1 0 5
摘 要 :传统 的眼底 图像拼合主要采用 SF I T算法 实现 ,算法计 算量 大,效 率低 ,准确 率也不 高。Har 提取 的是 图像 的 ri s 角点信 息,能较好准确地反应 图像的特征信息 。作者采用 Har 和 SF ri s I T算法相结合的方 式,采 用 Har 算法提取 的角点 ri s 信 息 ,并用这些角点提取 SF 特征描述符 ,且在 图像拼合的过程 中对算 法做 出相应 的改进 ,克服 了多模 式 图像 中局 部梯 I T 度信 息不一致带来的误差 ,计算效率 高,且拼合效果较好 。
中的梯度模和方 向可表示为
L( Y,3 x, k )一 L( Y, x,
ቤተ መጻሕፍቲ ባይዱ
m( )一 v ( z+ 1 ) L( 1 ) + ( z Y+ 1 一L( Y一 1 ) x, /L( , 一 x一 , ) L( , ) x, )
0x, ( )一 tn ( ( Y 1 一 L( , a- (L , + ) x 一 1 ) ( ( ) / L z+ 1 ) L( , 一 x一 1 ) ,) )
关键 词 :哈 里斯 角 点提 取 ;尺 度 不 变特 征 变换 ; 图像 拼 合 ; 图像 配 准 ; 图像 融合
中图法分类号 : P 9 . 1 文献标识号 : T 3 14 A 文章编号 :10 —0 4(0 2 930 —5 0 07 2 2 1 )0—5 70
Fu d s i g sm o ac b s d o mp o e a rsa d S F ag rt m n u ma e s i a e n i r v d h r i n I T l o i h
然后对高斯空 间 中的领域特 征点进 行采样 ,对 其梯度 方 向进行归类形成 梯度方 向直方 图 ,并使 用梯度模 量作 为 权重 ,最 后 选 择 梯 度 方 向直 方 图 主 峰 值 作 为 特 征 点 的
主方 向 。
代 表 了特征点 尺度 空 间领域 的 6 4个 采 样点 ,每个 小 方格 中的箭头代表 了采样点梯度 方向 ,长度 代表 模大 小 。将这
特征点的一种 ,包含了大量的信息 。Har 算子 l ] ri s _ 是受 到 3 信号处理中 自相关 函数 的启发 ,利 用图像 局部窗 口内的平 均灰度变化率来表示 该窗 口中心点 的角点量 ,同时还具 有 旋转 、平移不变性 ,可以达到亚像 素级的精度 。 Har 算 法中 ,图像 任意方 向上的 自相关 值 ,都可 以 ri s 表示为一组方形 区域 中图像灰度误差的综合
作者简介 :陶治江 (9 7 ) 1 8 一 ,男 ,江苏句容人,硕 士研究生 ,研究方 向为医学信号与图像处理 、计算 机软件与操作 系统;黄华 ( 9 1 ) 16 一 , 男 ,四川成都人 ,博士后 ,教授 ,研究方 向为医学电子学 、信号检测与处理 。E mal a z ̄a g c@1 6 cm - i oh in su 2 .o :t
并用其产生 图像 特征描 述符 ,以实现 图像 的配 准。算 法 主
要 包 含 以下 几 个 步 骤 。
D ) D x 专 (一 + + x
x
( 2 )
1 2 1 尺度空 间极值点检测 .. 对于一幅二维 图像 ,在不 同尺度下 的尺度 空 间可 以由 图像与高斯核卷积得 到 ,且高斯核 被 Kon ei edt k证 明是 实 n
一 一
a 0 - aD D
将 极值 点 带 入 式 () 后 得 到 极 值 大 小 D( )一 D+ 2
G( Y ∞ 一 x— ∽
式 中 :( )—— 图像 点的空 间坐标 ,卜 z,
尺度坐标 ,G
专号 , 果I I值 于 个 值 就 以 定 如 )的 小 某 阈 , 可 判 D (
・
30 ・ 58
d tM ) 一 l , a e M )一 1 e( 2 t c ( r + 2
计算机 工程 与设计
21 拄 o2
式 中 k作 为 一 个 常 系 数 ,用 来 产 生 两 个 领 域 尺 度 的 差 值 。
实践 中系数 志取值为 0 O ~0 0 ,当 目标 的 R值 大于 .4 .6 某一个阈值 时候 ,就判别该点为角点 。
式 中 x— E ,Y,胡 表 示 采 样 点 和 特征 点 之 间 的位 置 x
偏移 和尺度 偏移 ,对式 ( )求 导 并令 其 为零 ,得 到极 值 2
点 位 置
t,
现尺度变换 的唯一变换核 ,也被 Ln e eg等人证 明是 唯一 i br d
的线 性 核
L( Y, x, )一 G( Y, x, )*I x, ( )
该点不稳定而将 其舍 弃 ,最终保 留得 到稳定 的极值 点作 为
特征点 。 12 3 特 征 点 选 取 主 方 向 _.
( ,Y )—— 尺度可变 的高斯 函数 。实 践 中 ,高斯差 分 - , z
(O D G) 尺 度 空 间 可 以代 替 式 ( ) 得 到 尺 度 空 间 的 稳 定 特 1