机器人重启类型介绍
ABB机器人外部启动配置说明

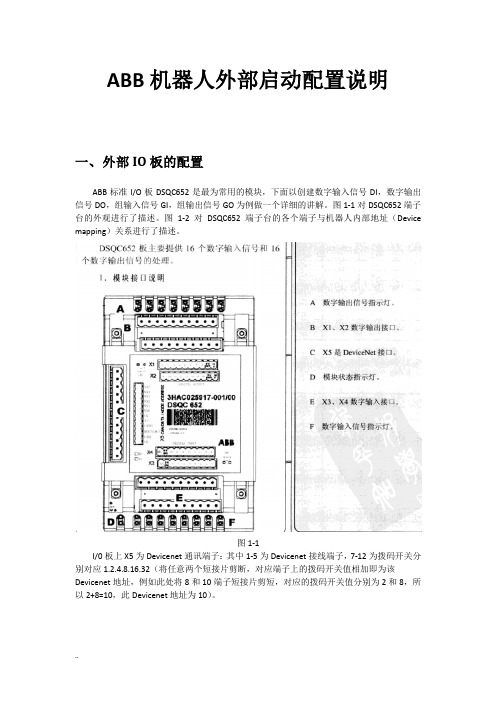
ABB机器人外部启动配置说明一、外部IO板的配置ABB标准I/O板DSQC652是最为常用的模块,下面以创建数字输入信号DI,数字输出信号DO,组输入信号GI,组输出信号GO为例做一个详细的讲解。
图1-1对DSQC652端子台的外观进行了描述。
图1-2对DSQC652端子台的各个端子与机器人内部地址(Device mapping)关系进行了描述。
图1-1I/0板上X5为Devicenet通讯端子:其中1-5为Devicenet接线端子,7-12为拨码开关分别对应1.2.4.8.16.32(将任意两个短接片剪断,对应端子上的拨码开关值相加即为该Devicenet地址,例如此处将8和10端子短接片剪短,对应的拨码开关值分别为2和8,所以2+8=10,此Devicenet地址为10)。
图1-21、定义DSQC652板的总线连接ABB标准I/O板都是下挂在DeviceNet现场总线下的设备,通过X5端口与DeviceNet现场总线进行通讯。
定义DSQC652板的总线连接相关参数说明见表1-1-1单击【ABB菜单】→【控制面板】→【配置】→【DeviceNet Device】→【添加】显示图1-1-1所示的界面图1-1-1单击“使用来自模板的值”行的下拉菜单,选择“DSQC 652 24 VDC I/O Device”,如图1-1-2所示图1-1-2点击【向下】按钮,找到参数名称Address,将值改成10。
单击【确定】,完成DSQC652板的总线连接。
提示“重启”选择【是】。
如图1-1-3所示图1-1-32、创建数字输入信号DI1单击【ABB菜单】→【控制面板】→【配置】→【Signal】→【添加】显示图1-2-1所示的界面,数字输入信号DI1相关参数说明见表1-2-1表1-2-1图1-2-1按照表1-2-1设定,设定完毕后如图1-2-2所示,单击【确定】,提示“重启”选择【是】,完成数字输入信号DI1的创建。
机器人设备常见故障排除的十个技巧

机器人设备常见故障排除的十个技巧机器人设备在现代工业生产中扮演着越来越重要的角色,但是在实际运行中难免会遇到各种各样的故障问题。
为了有效提高机器人设备的运行效率和延长使用寿命,掌握一些常见故障的排除技巧显得尤为重要。
在本文中,将分享机器人设备常见故障排除的十个技巧,帮助你快速解决故障问题,保障生产运行的正常进行。
1. 检查电源供应首先要确保机器人设备的电源供应是正常的,检查开关是否打开,插头是否松动,电缆是否断裂等。
有时候故障可能只是来自于电源供应的问题,及时排查可以避免不必要的麻烦。
2. 检查传感器传感器是机器人设备中的关键部件,负责感知周围环境并传达给控制系统。
当机器人出现异常运行时,需要检查传感器是否工作异常,清理传感器周围的灰尘或杂物,确保其正常运行。
3. 检查连接线路机器人设备通常有众多的线路连接,要经常检查连接线路是否松动或损坏,特别是在机器运行中频繁移动的地方。
及时修复线路问题可以有效减少故障发生的可能性。
4. 重启设备有时候机器人设备出现故障可能只是暂时性的问题,通过简单地重启设备可以解决一些无法在系统中找到原因的故障。
重启设备前记得保存好所有的数据,避免造成数据丢失。
5. 清洁设备机器人设备长时间运行后会积累大量的灰尘和杂物,影响设备的正常运行。
定期清洁设备表面和内部部件,特别是机器人关节和传感器等部位,可以有效预防故障的发生。
6. 更新软件机器人设备的软件系统也需要定期更新,以修复已知的BUG和优化系统性能。
确保软件是最新版本,可以提高设备的稳定性和可靠性,减少故障的发生。
7. 检查润滑部件机器人设备的关节和传动部件通常需要定期润滑以减少磨损和摩擦,确保设备的顺畅运行。
检查润滑部件的润滑油是否充足,是否已过期,及时更换和添加润滑油可以延长设备的使用寿命。
8. 校准设备有些机器人设备在长时间运行后可能需要进行重新校准以确保精准度和准确性。
定期校准设备可以避免设备运行的偏差和误差,提高设备的工作效率。
abb工程师认证参考题库

ABB工程师认证参考题库任务一:ABB工业机器人的开关机和重启操作1.ABB工业机器人关机时重新启动在哪个位置( )A控制面板 B手动操作 C校准 D ABB主菜单2.机器人工作站等电器设备起火时应该使用什么类型的灭火器( )A 二氧化碳 B水 C泡沫3.(判断题)拍下机器人示教器或者电控柜上急停打开急停后需要再按一次电机上电按钮解除急停状态()。
3.(操作题)ABB工业机器人的开机操作?4.(操作题)从示教器上关闭工业机器人的操作?5.简述工业ABB机器人的重启类型?任务二:示教器的日期和语言设定1.机器人系统时间可以从那个菜单上设置?A手动操作 B控制面板 C系统信息2.(操作题)将工业机器人的当前日期设置为当前时间?3.(操作题)将工业机器人的当前语言设置为英文?任务三:ABB工业机器人的手动操纵1.机器人手操器在不使用同时应放置在什么地方( )A示教器支架 B地上 C机器人本体上2.机器人手动状态下,可以通过那个按钮控制电机上电( )A电机按钮上 B系统输入motor on C使能装置按钮3.单轴操作,4-6动作模式下,顺时针旋转要干,则机器人如何运动( )A 4轴正向旋转B 6轴负向旋转C 6轴正向旋转4.单轴操作,1-3动作模式下,顺时针旋转要干,则机器人如何运动( )A 1轴正向旋转B 1轴负向旋转C 2轴正向旋转5.机器人微调时,为保证移动精确及便捷,一般采用哪种方法( )A轻微推动摇杆 B降低机器人运行速度 C使用增量模式6.水平安装机器人,线性操作,参考基坐标系方向,逆时针旋转摇杆则机器人如何运动( )A向上移动 B向下移动 C朝机器人正前方移动7.重定位运动时,参考哪一点旋转工具姿态( )A法兰盘中心 B当前选中的工具坐标系原点 C基座中心8.重定位操作时,一般参考那种类型的坐标系( )A基坐标系 B工件坐标系 C工具坐标系9.增量模式中的用户增量在哪里可以设置其大小( )A程序数据菜单中 B手动操作菜单中 C示教器屏幕右下角快捷键10.为便于手动操作的快捷设置,示教器上提供了几个快捷键按钮( )A 2B 4C 611.(填空题)机器人手动极限模式下机器人的运行速度最高只能达到()12.(填空题)ABB机器人IRB-120具有六个轴度其中三轴转动范围是()。
ABB机器人外部启动配置说明书

ABB机器人外部启动配置说明一、外部IO板的配置ABB标准I/O板DSQC652是最为常用的模块,下面以创建数字输入信号DI,数字输出信号DO,组输入信号GI,组输出信号GO为例做一个详细的讲解。
图1-1对DSQC652端子台的外观进行了描述。
图1-2对DSQC652端子台的各个端子与机器人内部地址(Device mapping)关系进行了描述。
图1-1I/0板上X5为Devicenet通讯端子:其中1-5为Devicenet接线端子,7-12为拨码开关分别对应1.2.4.8.16.32(将任意两个短接片剪断,对应端子上的拨码开关值相加即为该Devicenet地址,例如此处将8和10端子短接片剪短,对应的拨码开关值分别为2和8,所以2+8=10,此Devicenet地址为10)。
图1-21、定义DSQC652板的总线连接ABB标准I/O板都是下挂在DeviceNet现场总线下的设备,通过X5端口与DeviceNet 现场总线进行通讯。
定义DSQC652板的总线连接相关参数说明见表1-1-1单击【ABB菜单】→【控制面板】→【配置】→【DeviceNet Device】→【添加】显示图1-1-1所示的界面图1-1-1单击“使用来自模板的值”行的下拉菜单,选择“DSQC 652 24 VDC I/O Device”,如图1-1-2所示图1-1-2点击【向下】按钮,找到参数名称Address,将值改成10。
单击【确定】,完成DSQC652板的总线连接。
提示“重启”选择【是】。
如图1-1-3所示图1-1-32、创建数字输入信号DI1单击【ABB菜单】→【控制面板】→【配置】→【Signal】→【添加】显示图1-2-1所示的界面,数字输入信号DI1相关参数说明见表1-2-1表1-2-1图1-2-1按照表1-2-1设定,设定完毕后如图1-2-2所示,单击【确定】,提示“重启”选择【是】,完成数字输入信号DI1的创建。
ABB机器人外部启动配置说明

Digital Input
设定信号的类型
Assigned to Device
DSQC 652 24 VDC I/O Device 设定信号所在的 IO 模块
Device Mapping
1
设定信号所占用的地址
Invert Physical Value
NO
如果想将信号取反,可选 Yes
图 1-2-1 按照表 1-2-1 设定,设定完毕后如图 1-2-2 所示,单击【确定】,提示“重启”选择【就 是】,完成数字输入信号 DI1 的创建。
Digital Output
设定信号的类型
Assigned to Device
DSQC 652 24 VDC I/O Device 设定信号所在的 IO 模块
Device Mapping
1
设定信号所占用的地址
Invert Physical Value
NO
如果想将信号取反,可选 Yes
按照表 1-3-1 设定,设定完毕后如图 1-3-1 所示,单击【确定】,提示“重启”选择【就
ABB 机器人外部启动配置说明
图 1-2-2
3、创建数字输出信号 DO1
单击【ABB 菜单】【控制面板】【配置】【Signal】【添加】显示图 1-2-1 所示 的界面,数字输出信号 DO1 相关参数说明见表 1-3-1
表 1-3-1
参数名称
设定值
说明
Name
DO1
设定数字输出信号的名字
Type of Signal
表 1-1-1
参数名称
设定值
说明
Name
d652
设定 IO 板在系统中的名字
Address
10
Fanuc机器人IO配置和UIUO配置
Fanuc机器人IO配置和UI/UO配置说明:这几天直接跳转发送Fanuc部分内容知识,以供大家阅读借鉴。
这里主要给大家分享Fanuc机器人的IO分类以及CRMA15、CRMA16的IO分配,UI/UO的分配。
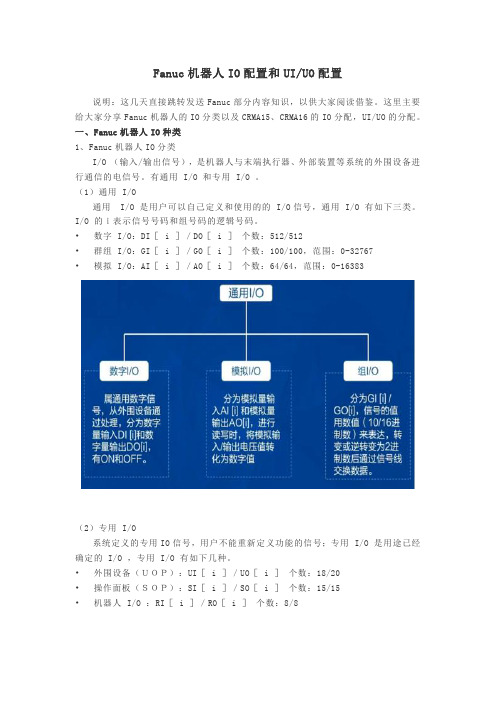
一、Fanuc机器人IO种类1、Fanuc机器人IO分类I/O (输入/输出信号),是机器人与末端执行器、外部装置等系统的外围设备进行通信的电信号。
有通用 I/O 和专用 I/O 。
(1)通用 I/O通用I/O 是用户可以自己定义和使用的的 I/O信号,通用 I/O 有如下三类。
I/O 的i表示信号号码和组号码的逻辑号码。
•数字 I/O:DI[ i ]/DO[ i ]个数:512/512•群组 I/O:GI[ i ]/GO[ i ]个数:100/100,范围:0-32767•模拟 I/O:AI[ i ]/AO[ i ]个数:64/64,范围:0-16383(2)专用 I/O系统定义的专用IO信号,用户不能重新定义功能的信号;专用 I/O 是用途已经确定的 I/O ,专用 I/O 有如下几种。
•外围设备(UOP):UI[ i ]/UO[ i ]个数:18/20•操作面板(SOP):SI[ i ]/SO[ i ]个数:15/15•机器人 I/O :RI[ i ]/RO[ i ]个数:8/83、Fanuc机器人图片(图片来自百度网络)二、Fanuc机器人通讯IO模块1、Fanuc机器人硬件种类和机架号机架系指构成I/O 模块的硬件的种类。
•0 =处理 I/O 印刷电路板•1~16=I/O 单元 MODELA/B•32 =I/O LINK 从动装置•48 =外围设备控制接口(CRMA15、CRMA16)2、Fanuc机器人CRMA15、CRMA16插槽插槽系指构成机架的I/O 模块部件的号码。
•使用处理 I/O 印刷电路板的情况下,按所连接的印刷电路板顺序分别为插槽1、2...。
•使用 I/O 单元 MODEL A/B的情况下,则为用来识别所连接模块的号码。
ABB机器人的系统IO功能详解
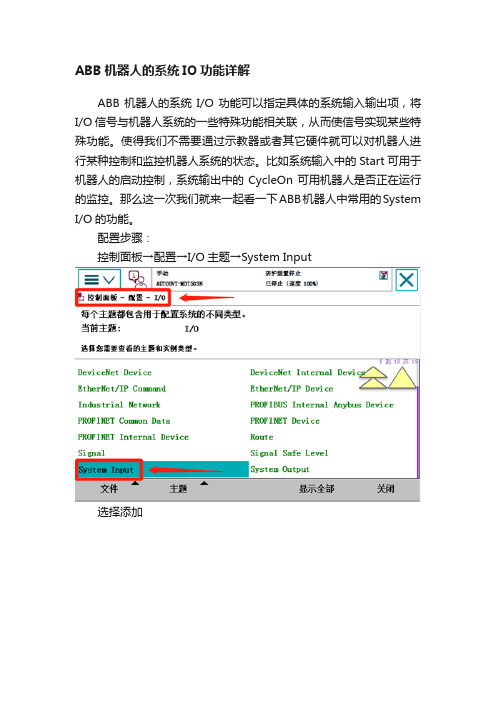
ABB机器人的系统IO功能详解ABB机器人的系统I/O功能可以指定具体的系统输入输出项,将I/O信号与机器人系统的一些特殊功能相关联,从而使信号实现某些特殊功能。
使得我们不需要通过示教器或者其它硬件就可以对机器人进行某种控制和监控机器人系统的状态。
比如系统输入中的Start可用于机器人的启动控制,系统输出中的CycleOn可用机器人是否正在运行的监控。
那么这一次我们就来一起看一下ABB机器人中常用的System I/O的功能。
配置步骤:控制面板→配置→I/O主题→System Input选择添加进行SignalName与Action值的设定。
点击确定后会提示是否重启机器人,可根据需要灵活选择现在立即重启或者在一起完成其它配置后手动进行重启。
到这里系统输入信号的配置流程演示就完成了,系统输入的其它功能的配置流程与系统输出的配置流程也与之相似,这里不再演示。
在实际应用中,Start信号应该使用Input类型信号进行关联,上边我为了演示系统输出也可以使用Output类型信号进行关联故使用了do0信号。
具体使用什么信号可以根据现场的实际情况来灵活配置。
下面我们就来看ABB机器人为我们提供的其它的系统I/O信号的值的含义。
系统输入信号系统输出信号:上述功能汇总整理基于RobotWare6.07,其它版本的RobotWare功能可能会略有增删。
由于篇幅限制,信号的详细功能请查阅ABB机器人随机光盘中所的“技术参考手册- 系统参数.pdf”,手册中对信号的作用与区别有更加详细的解释。
没有随机光盘的小伙伴可以点击下方的下载链接进行下载。
点我下载ABB机器人随机光盘文章首发自动化生产之家。
机器人问题及解决办法详解

线
运行费用
快 措施:编程时尽量避免有摔枪姿态,如果姿态受限可以放慢机器人编程速度。
关选项>启动类型>空格选中冷启动 提示栏显示下一次将为冷启动。
视程序与主程序赋值有冲突。
措施:在主程序里焊接完成后再清除一次启动信号。
:如再出现 重启焊机并冷启动机器人。
能用,只能冷启,这种情况发生过多次。
需解决
安全信号是否满足(变量a_safe或b_safe状态为TRUE)
线头问题
:更换喷嘴座并注意安装,必须保证瓷套与喷嘴平行。
嘴堵塞。
措施:检查送丝机及枪缆是否有堵塞或气管弯曲。
遮光旗升起,焊接过程中避开遮光旗挡不到的弧光。
飞溅烫伤气管。
措施:替换气管接头和气管并加强防护。
郑州地区配件代理来看过以为是防撞罩弹簧问题,修理之后问题依然出现,平均2天一次,
枪站气缸把枪夹弯,然后信号丢失。
措施:校准清枪程序。
较贵。
最近够买的备件,需要时更换。
丢失现象较多,多次联系厂家,但未来解决。
ABB机器人系统参数配置中英文含义

ABB机器⼈系统参数配置中英⽂含义系统参数配置I/0中英⽂含义1访问级别 2设备的信任⽔平 3⽹络设备 4以太⽹/ IP命令5⼯业⽹路6按某路线发送/通道7信号安全⽔平8交叉连接9设备⽹命令10 设备⽹内部设备11以太⽹/ IP设备12PROFIBUS内部任何总线设备13 信号 14系统输⼊ 15 System Output 系统输出系统输⼊中action英⽂含义1 电机运⾏(开启)2开始3停⽌ 4软停⽌ 5中断6重置紧急停⽌7电机启动并开始运⾏8电机停⽌(关闭)9从主程序开始10快速停⽌/急停11在循环结束时停⽌12加载和启动 13复位执⾏错误信号14停⽌教学15系统重新启动 16备份 17禁⽤备份 18PP移动到主程序(即程序指针移到主程序)19写访问 20 加载 21 sim卡模式22极限转速23碰撞避免24实现节能Continuous 连续 cycle循环系统输出中action英⽂含义1电机运⾏(开启) 2循环开启 3⾃动开启 4TCP速度 5电机接通状态 6电源故障错误 7运动监督 8电机停⽌(关闭)9紧急停⽌10解除已ok 11执⾏错误12电机关闭状态13运动监督触发14路径返回区误差 16 TCP速度参考值17机械装置活动18机械装置不动作19备份进⾏中20 sim卡模式 21碰撞避免23模拟输⼊输出24任务执⾏25⽣产执⾏错误26备份错误27极限转速28写⼊存取30节能模式31温度报警32SMB电池电量低34CPU 风扇不运⾏35绝对精度活跃36系统输⼊忙系统参数配置man-machine communication(⼈机通信)中英⽂含义automtically switch jog unit:⾃动切换点动(慢速)装置most common I/O signal 最常见的I/O信号most common instruction-list 2最常见的说明-列表2Production Permissiom ⽣产许可Backup Settings备份设置most common instruction-list 1最常见的说明-列表1most common instruction-list 3最常见的说明-列表3W arning at Start警告在开始。
任务 工业机器人手动操作基础知识

(1)手动线性
在“基本”功能选项卡,选中“Freehand”的“手动线性 图标”, 如图所示。然后选中鼠标指示放到箭头上,按住 鼠标左键,以箭头指示的方向进行线性移动。
实际应用中,往往需要工具的末端做线性运动,对于
本项目的工具TCP做线性运动,应在“基本”功能选项卡, 选中“设置”的“工具”下拉菜单中选择“MyTool”。 如图所示。与上面同样的方法进行的工具TCP做线性运动。
将MyTool安装到机器人手腕上,其操作方法为,在布局中的 MyTool上按住鼠标左键,向上拖到“IRB120_3_58_01”后松开左键, 弹出如图所示对话框,单击“是”。工具MyTool安装到机器人上效
果如图所示。将MyTool安装到机器人手腕上,其操作方法 也可采用,鼠标右键单击布局中的MyTool,选择“安装 到”“IRB120_3_58_01”。
ABB机器人有机器人本体(本教材以ABB IRB120为对象)、控制柜及示教器等组成
1工业机器人本体 IRB120机器人本体详细信息可参见项目一技术参数部分。 2控制器 机器人控制器主要包括两部分:控制面板和外部接口,控
制面板主要有:总开关、急停按钮、电机开启指示以及模
式选择开关等;如图所示。外部接口主要有示教器连接接 口、机器人驱动接口、机器人控制接口以及I/O通讯接口 等。
(1)更改默认语言: 单击“Default Language”>去掉 “English”前面的勾>勾 选“Chinese”。 (2)选择现场总线及协 议:
单击“Industrial Networks” >勾选“709-
1 DeviceNet Master/Slave” ; 单击“Anybus Adapters” >勾选
设备说明书模板

XXX项目电气用户手册感谢您选用本公司的设备!为了保证作业者的安全以及设备的安全,请您正确使用!您在使用前应熟记设备使用说明书中的操作内容。
手动操作前确认按钮的实际功能。
负载运转前应确认设备空载运行的可靠性。
设备所检测工件的质量除人为因素外,受以下因素的影响:1.机械因素:设备运转的平稳性设备运转前系统调整的准确性2.电气系统:控制系统可靠性3.其它:工件原料的各项属性参数电网电压波动情况目录一.设备的用途及特点 (4)1. 设备用途 (4)2. 特点 (4)二.主要技术参数 (4)三.机械系统 (4)四.气动系统 (4)五.电气控制系统 (5)1、系统介绍 (5)2、电气安装 (5)3、控制器操作说明 (5)4、设备的操作 (5)六.使用、安全、维护注意事项 (9)一.设备的用途及特点1. 设备用途装配风扇和车模型。
2. 特点■控制系统采用西门子S7-1500和S7-1200系列PLC控制器,触摸屏显示,性能稳定。
系统的运行状态及系统报警在可编程终端上显示,良好的人机操作界面使系统维护直观、操作便捷。
■该系统采用符合人机工程的设计,使操作者操作便捷、省力,减轻操作者劳动作业强度。
二.主要技术参数控制箱输入电源:三相380V/50HZ电压波动范围:AC 380±10%。
三.机械系统装配系统①机器人本体选用新型交流伺服电机,结构紧凑、响应快、可靠性高、运动平滑灵活,效率高,动作范围更广泛。
②高灵敏碰撞检测和柔性控制:避免意外碰撞引起位置偏移;机器人手臂比安全支架更快检测到负荷变化,能够自动切换成柔性控制,避免撞击。
③运动性能大幅度提高:驱动电机的容量及减速器的规格大幅度提高④减少自身的干涉:单独的小型手腕结构及弧形手臂能够大幅减少自身干涉。
冷却系统:采用左右对称风冷结构,有利于内部热量的及时排除。
四.气动系统根据用户现场要求安装接口,气路系统带空气过滤器、减压阀及油雾器并配有单独气路开关,主要气动元件(气缸、电磁阀等)均采用SMC产品,性能稳定,调整方便,配件便于采购。
KEBA机器人操作说明
KEBA机器人操作说明0界面简介KeTop是KEBA公司专门为工业机器人手持终端提供的硬件解决方案,该手持终端运行KEBA公司自主研发的人机界面软件TeachView。
该人机界面具有易操作、人性化,符合人机工程学。
TeachView登录界面图左侧的灯与按钮分别为状态与配置管理部分,而右侧按钮为机器人动作操作按钮,底部的按钮则是调节部分。
除了上述三部分,还有急停按钮、USB接口、手动/自动开关。
左侧4个灯表示了系统运行状态。
系统正常启动为RUN灯亮,绿色。
发生错误Error灯会亮,红色。
机器人上电时Motion灯亮,绿色。
左侧7个图标,分别为自定义界面、配置管理、变量管理、项目管理、程序管理、坐标显示、信息报告管理。
右侧机器人动作操作部分,通过按“+”与“-”按键可以在编程或者点动时调节机器人的坐标位置,点击“2nd”按键可以翻到下一页(附加轴页)。
Start和Stop按钮与程序运行和停止有关。
底部F1、F2、Rob、F/B为闲置未定义按钮,Mot按钮用于机器人上电或下电,Jog用于切换机器人坐标系(轴坐标系、世界坐标系、工具手坐标系),Step用于切换程序进入单步模式还是连续模式。
V+和V-用于调节机器人运动速度。
在主界面顶部,有一个状态栏,它包含了机器人的操作模式、机器人状态及名称、坐标系、运动调节速度、项目程序名称、程序状态及执行模式、急停开关的状态、使用者等级等有关机器人系统状态方面的信息。
1配置管理维护1.1维护以下简要介绍一下维护界面底部的配置按钮:设置界面设置界面主要完成用户的登入、登出和系统设置。
登录界面可以选择要登录的用户,以及是否具有写权限和控制权。
系统设置包括界面语言选择以及日期、时间的设置,如下图。
用户界面用户为当前连接的使用者,包括其IP地址,等级以及是否有写入权限,如下图。
管理界面只有登录用户为管理员用户时才可以打开管理界面,可以管理用户组,对他们创建、编辑及删除等操作,如下图所示:版本界面版本界面显示控制器、手持设备和工具使用的版本信息。
E-01-O-A-机器人的开关机及重启.
一、选择题1.工业机器人的主电源开关包含几个档位?()A 1个B 2个C 3个D 自定义2.当机器人系统出错或崩溃时,应采用()。
A 重启B 重置RAPIDC 重置系统D 恢复到上次自动保存的状态3.恢复机器人系统到出厂状态采用()。
A 重置系统B 重置RAPIDC 返厂D 直接重启4.出现系统故障时,最有效的操作方式是()A 关机B 重置系统C 返厂D重新安装系统5.下列情况重新启动机器人系统的是()A更改了机器人系统配置参数B RAPID程序出现程序故障C RAPID程序出现程序出现奇点D出现系统故障(SYSFAIL)二、填空题1.机器人实际操作的第一步就是,只要将机器人控制柜上的总电源旋钮从【OFF】扭转到【ON】即可。
2.关闭机器人系统时,只需将机器人控制柜上的总电源旋钮从【ON】扭转到【OFF】即可。
3.采用关闭主计算机的选项时,应在控制器故障时使用。
4.恢复机器人系统到出厂状态采用。
5.出现系统故障时,最有效的操作方式是。
6.重新启动机器人。
三、判断题1.工业机器人在配置完成系统参数后,无需重新启动机器人启动。
()2.工业机器人长时间不用时,中间需定期开机给内部电池充电。
()3.重启机器人系统时,需要手动将主电源关闭。
()4.出现系统故障时,最有效的操作方式是恢复到上次自动保存的状态。
()5.恢复机器人系统到出厂状态采用返厂。
()6.当机器人系统出错或崩溃时,应采用恢复到上次自动保存的状态。
()7.RAPID程序出现程序出现奇点是需要重新启动机器人系统。
()四、问答题1.描述ABB工业机器人系统的开关机步骤?2.重新启动机器人系统的类型包含哪些?3.出现什么情况下需要重新启动机器人系统?4.简述各重新启动的类型?5.练习重启及关闭主计算机类型?。
《工业机器人编程》试题及答案

【易】【对】1、对机器人进行示教时, 模式旋钮打到示教模式后, 在此模式中,外部设备发出的启动信号()。
A.无效B.有效C.延时后有效 D.以上都不正确【易】【A】2、MOTOMAN 机器人NX100 控制柜上的运动模式没有()。
A.示教模式B.急停模式C.再现模式D.远程模式【中】【B】3、下图线框中钥匙所设定的运动模式是()。
A.示教模式B.自动模式C.手动模式D.远程模式【中】【C】4、ABB工业机器人运动模式的设定是在()上进行的。
A.示教器B.触摸屏C.机器人本体D.控制柜【中】【D】5、在手动模式下,机器人启用装置的安全功能会停用,以便机器人在没有人工干预的情况下移动。
【中】【错误】6、自动模式下无法编辑程序和手动控制机器人运行,如要进行这些操作,必须切换到手动模式。
【中】【错误】1、设置ABB工业机器人语言,需要点击示教器“主菜单”界面中的()选项。
A. 控制面板B.手动操纵C. 注销D. 重新启动【易】【A】2、ABB工业机器人出厂时界面为英语语言,要更改为中文,选项选择顺序为()。
A. Control Panel—Language—ChineseB. Jogging—Language—ChineseC. Control Panel—ProgKeys—ChineseD. Jogging—ProgKeys—Chinese【中】【A】3、再设置ABB工业机器人语言时弹出以下对话框,是系统提示用户()。
A. 语言更改失败,是否放弃B. 确认是否更改语言C. 需要重启系统才能更改,是否重启D.语言更改失败,是否重新尝试【中】【C】4、设置ABB工业机器人语言,需要在“控制面板”界面中点击()选项。
A. 设置B.语言【易】【正确】1、以下图片中,线框框起来的部分显示的是()。
A. 机器人当前工作模式B. 机器人外轴状态C. 机器人使能状态D. 机器人当前运行状态【易】【B】2、以下图片中,线框框起来的部分显示的是()。
机器人复位操作方法

机器人复位操作方法机器人复位操作是指将机器人恢复到初始状态的操作,通常包括将机器人的各个关节回到原位、重置机器人的坐标系以及重新初始化机器人的传感器等操作。
下面我将详细介绍机器人复位的操作方法。
1. 关节回到初始位置:机器人复位的第一步是将机器人的各个关节回到初始位置。
这可以通过机器人的控制器来实现,通常可以通过发送指令给机器人的控制器将机器人的关节运动到预设的初始位置。
机器人通常需要以逐个关节的方式逐步回到初始位置,可以先将第一个关节回到初始位置,然后再逐个回到初始位置,直到所有关节都回到初始位置。
2. 重置机器人坐标系:机器人复位的第二步是重置机器人的坐标系。
机器人的坐标系通常定义在机器人的末端执行器或工具上,用来描述机器人末端执行器在工作空间中的位置和姿态。
在复位操作中,机器人的坐标系需要回到初始位置和初始姿态。
重置机器人的坐标系可以通过将机器人的末端执行器移动到预设的初始位置和初始姿态来实现。
3. 重新初始化传感器:机器人复位的第三步是重新初始化机器人的传感器。
机器人通常搭配了各种传感器,比如激光传感器、摄像头、力传感器等,用来感知周围环境和工件的信息。
在复位操作中,这些传感器需要重新初始化,以确保它们的初始状态是正确的。
对于摄像头和激光传感器等视觉传感器,可以通过对其进行校准来恢复它们的初始状态;对于力传感器等力觉传感器,可以通过对其进行校准和调零操作来恢复其初始状态。
4. 复位机器人控制器:机器人复位的最后一步是复位机器人的控制器。
机器人的控制器通常是一个电脑或者嵌入式系统,用来控制机器人的运动和感知。
在复位操作中,机器人的控制器需要重新初始化和复位,以确保其初始状态是正确的。
这可以通过重启机器人的控制器或者通过软件方式对其进行重新初始化来实现。
总结起来,机器人复位操作包括将机器人的各个关节回到初始位置、重置机器人的坐标系、重新初始化机器人的传感器以及复位机器人的控制器等步骤。
通过执行这些操作,机器人可以回到初始状态,为下一次任务做好准备。
机器人控制软件机器人软件功能列表-V1
6.8 注释
可以对程序里的语句进行注释和反注释
6.9 变量断电保持
可以保存变量的过程值,断电重启后变量的值是断电前保存的值
6.10 流语句
用于控制程序的循环和条件调整
6.11 数学语句
可以直接调用sin、cos、tan、ln函数
6.12 位置点求和语句
将位置点与偏差相加后输出
6.13 位语句
实现变量值的位的左移右移和设置
4.41 信息、日志
显示机器人当前和近期的错误信息,包含错误号、时间、类型、错误描述和错误来源
4.42 状态显示
示教器的状态栏会显示机器人的运行模式、使能状态、参考的坐标系、工具、速度、公司标志、程序运行的状态和模式、以及安全回路状态
4.43 机器人状态显示灯
示教器有4个指示灯,显示机器人的使能、错误、程序运行状态
7.9 设置AO信号
可以在预读时或者运行到该语句时设置AO信号的值
7.10 AO速度跟随
AO同步打开和结束之间的运动语句,AO的值会随着机器人的速度线性变化
7.11 读取组DI信号
可以在预读时或者运行到该语句时读取组DI端口号的值
7.12 设置组DO信号
可以在预读时或者运行到该语句时设置组DO端口号的值
3.14 配置机器人回归路径下的动态信息 配置机器人回归路径下的动态信息:包括点到点路径、笛卡尔路径的动态信息
3.15 关节限制
配置机器人的关节限制
3.16 保存机器人配置文件
将配置软件所配置信息保存成xml格式
3.17 打开机器人配置文件
打开以xml格式保存的机器人配置文件
四、示教器基本功能
功能模块
5.8 带角度的圆弧运动
机器人走一个由起始点、中间点和末点确定的圆的一段圆弧
NACHI 那智机器人资料 操作篇

步骤 步骤
4
从1开始,其后自动增加。 1
2
步骤 5
步骤
最大 9999
page 37
有两种步骤
步骤
移动命令
移动机器人
应用命令没 有位置的信
息
应用命令 为信号的开和关及焊接等工作
或者称「功能」
(応用命令的例子) SPOT FN119 点焊 CALLP FN80 程序调用 SETM FN105 输出信号操作
page 9
停止输入时按[R]键
画面上方有相应的快捷键(简单 操作)
第2章 上电、模式的选择
第2章 上电、模式的选择
参考使用说明书∶ 「基本操作篇」第3章
page 10
接通电源
FD控制装置
P OW E R
电源开关转到ON
ON
OFF
电源开关
系统自我诊断完成后,自动 出现以下画面
用模式切换开关可分别 显示设定好的画面
模
可以进行手动操作
不可手动操作 不可自动运行
式
※2边的模式开关都转到
※ 造成机器人不动的操作
切
示教模式
换
开
关
不可手动操作 不可自动运行
可以自动运行
※ 造成机器人不动的操作
※2边的模式开关都转到 再生模式。
page 13
第3章投入运转准备和手动操作
第3章
投入运转准备
和手动操作
参考使用说明书∶ 「基本操作篇」第3章
FD
AX
→
对应号码的程序就在画面上被调出来 了. 显示[无]就是空程序,可以新建.
显示[有]的情况下,即那个程序号码已经被使 用,所以要另外选择其他程序号码.
page 41
ABB机器人外部启动配置说明
一、外部 IO 板的配置
ABB 标准 I/O 板 DSQC652 是最为常用的模块,下面以创建数字输入信号 DI,数字输出 信号 DO,组输入信号 GI,组输出信号 GO 为例做一个详细的讲解。图 1-1 对 DSQC652 端子 台的外观进行了描述。图 1-2 对 DSQC652 端子台的各个端子与机器人内部地址(Device mapping)关系进行了描述。
图 1-1 I/0 板上 X5 为 Devicenet 通讯端子:其中 1-5 为 Devicenet 接线端子,7-12 为拨码开关分 别对应 1.2.4.8.16.32(将任意两个短接片剪断,对应端子上的拨码开关值相加即为该 Devicenet 地址,例如此处将 8 和 10 端子短接片剪短,对应的拨码开关值分别为 2 和 8,所 以 2+8=10,此 Devicenet 地址为 10)。
设定 IO 板在系统中的名字
Address
10
设定 IO 板在总线中的地址
来自模板的值
DSQC 652 24 VDC I/O Device 选择 DeviceNet 设备
单击【ABB 菜单】【控制面板】【配置】【DeviceNet Device】【添加】显示图 1-1-1 所示的界面
图 1-1-1 单击“使用来自模板的值”行的下拉菜单,选择“DSQC 652 24 VDC I/O Device”,如图 1-1-2 所示
..
图 2-1-2
图 2-1-3
..
三、MAIN 程序的编辑
详见附件
图 2-1-4
..
四、程序和 IO 配置的导出与导入
程序文件和 IO 配置可以导出到 USB 设备,需要指出的是:路径中不能包含中文 程序文件的导出与导入见下图:
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
通常,以下情况下需重新启动机器人系统:
• 安装了新的硬件。
• 更改了机器人系统配置文件。
• 添加并准备使用新系统。
• 出现系统故障(SYSFAIL)。
重启类型:
重启类型效果
热启动使用当前系统和当前设置重新启动系统。
所有程序和配置将保存。
关机将关闭主机,从而关闭整个系统。
当前系统将保存。
B- 启动将使用当前系统和最近成功关机后的系统数据重新启动控制器。
I- 启动将使用当前的系统和出厂默认设置重新启动控制器。
注意,这将从内存中永久性删除任何用户定义的设置和配置!
P- 启动将使用当前系统重新启动控制器,重新安装RAPID。
注意,这将从内存中永久性删除任何用户加载的RAPID 程序!
X- 启动将使用当前系统以外的另一个系统重新启动控制器。
在启动时,引导应用程序将启动,允许您指定运行哪个系统。
C- 启动控制器将重新启动,允许您使用:
• 在硬盘上安装的但与上次运行的系统不同的另一个系统
• 将安装新的系统
不管您选择哪个系统,都将从控制器删除当前系统。
在启动时,引导应用程序将启动,允许您指定运行哪个系统。