3-北斗-全球卫星导航系统(GNSS)接收机数据自主交换格式BD410001-2015
UM982 BDS GPS GLONASS Galileo QZSS 全系统全频高精度定位定向模块用

INSTALLATION AND OPERATIONUSER MANUALUM982BDS/GPS/GLONASS/Galileo/QZSS全系统全频高精度定位定向模块修订记录权利声明本手册提供和芯星通科技(北京)有限公司(以下简称为“和芯星通”)相应型号产品信息。
和芯星通保留本手册文档,及其所载之所有数据、设计、布局图等信息的一切权利、权益,包括但不限于已有著作权、专利权、商标权等知识产权,可以整体、部分或以不同排列组合形式进行专利权、商标权、著作权授予或登记申请的权利,以及将来可能被授予或获批登记的知识产权。
和芯星通拥有“和芯星通”、“UNICORECOMM”以及本手册下相应产品所属系列名称的注册商标专用权。
本手册之整体或其中任一部分,并未以明示、暗示、禁止反言或其他任何形式对和芯星通拥有的上述权利、权益进行整体或部分的转让、许可授予。
UM982 User Manual免责声明本手册所载信息,系根据手册更新之时所知相应型号产品情形的“原样”提供,对上述信息适于特定目的、用途之准确性、可靠性、正确性等,和芯星通不作任何保证或承诺。
和芯星通可能对产品规格、描述、参数、使用等相关事项进行修改,或一经发现手册误载信息后进行勘误,上述情形可能造成订购产品实际信息与本手册所载信息有差异。
如您发现订购产品的信息与本手册所载信息之间存有不符,请您与本公司或当地经销商联系,以获取最新的产品手册或其勘误表。
前言本手册为用户提供有关和芯星通UM982模块的硬件组成信息。
适用读者本手册适用于对GNSS模块有一定了解的技术人员使用。
UM982 User Manual目录1产品简介 (1)1.1产品主要特点 (2)1.2技术指标 (2)1.3模块概览 (5)2硬件组成 (6)2.1机械尺寸 (6)2.2引脚功能描述(图) (8)2.3电气特性 (11)2.3.1最大耐受值 (11)2.3.2工作条件 (11)2.3.3IO阈值特性 (12)2.3.4天线特性 (12)3硬件设计 (13)3.1推荐的最小设计 (13)3.2外部天线馈电设计 (14)3.3接地与散热 (15)3.4模块上电与下电 (15)4生产要求 (16)5包装 (17)5.1标签说明 (17)5.2包装说明 (17)1产品简介UM982是和芯星通自主研发的新一代BDS/GPS/GLONASS/Galileo/QZSS全系统全频高精度定位定向模组,基于和芯星通自主研发的新一代高精度高性能GNSS芯片 — NebulasⅣTM设计,主要面向无人机、割草机、精准农业及智能驾考等领域,支持全系统全频点片上 RTK 定位及双天线定向解算,可作为移动站或基站使用。
北云GNSS高精度接收机快速使用说明书

GNSS高精度接收机快速使用说明书2018年8月20日目录1 串口数据格式说明 (1)2 基准站和流动站快速切换 (2)2.1 要配置成基准站 (2)2.1.1 方式一:恢复默认配置重启法 (2)2.1.2 方式二:逐条配置法 (2)2.2 要配置成流动站 (3)2.2.1 方式一:恢复默认配置重启法 (3)2.2.2 方式二:逐条配置法 (3)3 基准站和流动站配置 (4)3.1 基准站配置 (4)3.2 流动站配置 (6)4 出厂默认配置 (7)I1串口数据格式说明北云GNSS板卡(接收机)串口数据格式可分为novatel、rtcm、log、fpga四种。
具体定义如下:1)novatel格式:输出标准的NMEA-0183格式协议,具体可见文档《北云GNSS高精度接收机NMEA0183协议说明书》。
2)rtcm格式:基准站模式下默认输出标准的RTCM3.2格式差分数据。
帧头D300开头。
默认输出1074、1084、1114、1124、1006、1033和nav数据帧,不需要单独开启。
默认条件下差分数据量约500字节每秒,卫星数越多,差分数据量越大。
3)log格式:可以输出北云自定义格式的调试信息,便于研发人员进行快速故障定位和数据分析。
4)fgpa格式:可以输出北云自定义格式的原始数据,可用于更深层次的故障定位和数据分析。
注意:1,在novatel格式下,常用指令集均可识别,且指令执行后都会返回“OK”。
2,若需查询串口波特率及格式,可以用log comconfig指令来查询。
3,若需查询各串口输出语句,可用log loglista once 来查询。
4,在rtcm格式下,只识别interfacemode开头的指令。
常用指令集见文档《北云GNSS高精度接收机常用指令集》。
2基准站和流动站快速切换基准站和流动站可以通过串口指令快速切换。
当不确定目前板卡(接收机)是基准站还是流动站时,也可以直接切换。
Beidou ICD V1.0

4
4.1 4.2
信号规范 .........................................................................................3
信号结构 ................................................................................................. 3 信号特性 ................................................................................................. 3 载波频率 ........................................................................................... 3 调制方式 ........................................................................................... 3 极化方式 ........................................................................................... 4 载波相位噪声 ................................................................................... 4 用户接收信号电平 ........................................................................... 4 信号复用方式 ................................................................................... 4 卫星信号工作带宽及带外抑制 ........................................................ 5 杂散 ................................................................................................... 5 信号相关性 ....................................................................................... 5 星上设备时延差 ............................................................................... 5
北斗一代接收机数据接口要求
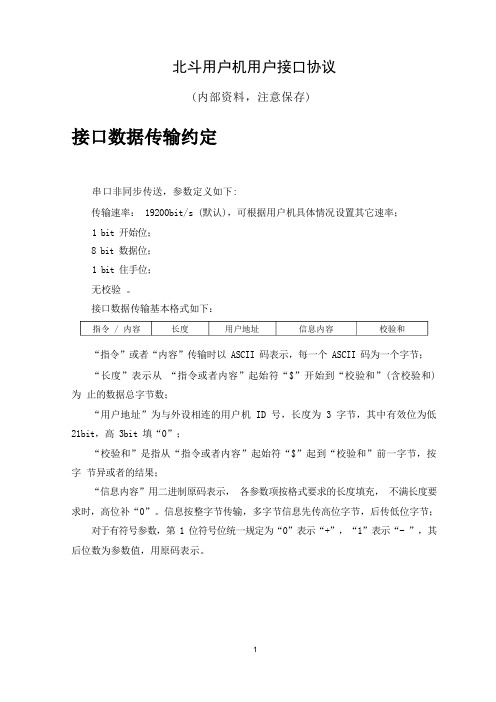
北斗用户机用户接口协议(内部资料,注意保存)串口非同步传送,参数定义如下:传输速率: 19200bit/s (默认),可根据用户机具体情况设置其它速率; 1 bit 开始位; 8 bit 数据位; 1 bit 住手位; 无校验 。
接口数据传输基本格式如下:“指令”或者“内容”传输时以 ASCII 码表示,每一个 ASCII 码为一个字节; “长度”表示从 “指令或者内容”起始符“$”开始到“校验和”(含校验和)为 止的数据总字节数;“用户地址”为与外设相连的用户机 ID 号,长度为 3 字节,其中有效位为低 21bit ,高 3bit 填“0”;“校验和”是指从“指令或者内容”起始符“$”起到“校验和”前一字节,按字 节异或者的结果;“信息内容”用二进制原码表示, 各参数项按格式要求的长度填充, 不满长度要 求时,高位补“0”。
信息按整字节传输,多字节信息先传高位字节,后传低位字节;对于有符号参数,第 1 位符号位统一规定为“0”表示“+”,“1”表示“- ”,其 后位数为参数值,用原码表示。
指令 / 内容信息内容 用户地址 校验和长度定位信息类别:“普通”表示用户所在位置的大地高程数据<16300 米或者天线高<400 米,“高 空”表示用户所在位置的大地高程数据≥16300 米或者天线高≥400 米;当“测高方式”为“00”时, “高程数据和天线高”参数单位 1 米。
对于普通用 户,该参数高 16bit (第 1 位为符号位)为天线所在点的大地高程数据,低 16bit 为 天线高(填全“0” );对于高空用户,该参数为为天线所在点的大地高程数据,是测高方式 2 bit 00 有高程01 无测高 10 测高 1 11 测高 2高程指示 1 bit0 普通有无时差 1 bit固定填 0紧急定位 1 bit定位 2bit00保密 1 bit固定填 0高程数据和天线高 气压数据32bit 32bit用户地址 电文长度 是否应答 24bit 16 bit 8bit传输速率8bit 帧号8bit (固定填 0)自检频度 16bit 输出频度 16bit(空)定位申请 $DWSQ 通信申请 $TXSQ 串口输出 $CKSC IC 检测 $ICJC 系统自检 $XTZJ 时间输出 $SJSC 版本读取 $BBDQ24 bit 24 bit 24 bit 24 bit 24 bit 24 bit 24 bit8 Bit 8 bit 8 Bit 8 bit 8 bit 8 bit 8 bit入站频度 16bit 电文内容 最长 1680bit16 bit 16 bit 16 bit 16 bit 16 bit 16 bit 16 bit信息类别 8bit 信息类别 8bit无符号数;当“测高方式”为“01”时,对于普通用户,“高程数据和天线高”参数高 16bit 填全“0”,低 16bit 填天线距离地面的高度,单位为 0.1 米;对于高空用户,该参数填天线距离地面的高度,单位为 0.5 米;当“测高方式”为“10”时,对于普通用户,“高程数据和天线高”参数高 16bit 填全“0”,低 16bit 填天线距离地面的高度,单位为 0.1 米;对于高空用户,该参数填天线距离地面的高度,单位为 0.5 米;当“测高方式”为“11”时,对于普通用户,“高程数据和天线高”参数低 16bit 填天线距离用户机中气压仪的高度,单位为 0.1 米,高 16bit 填用户机中气压仪所处位置的概略正常高,其中第 1 位为符号位,单位 1 米;对于高空用户,“高程数据和天线高”参数填用户机中气压仪所处位置的概略正常高,单位 1 米。
BD 440017-2017 北斗地基增强系统基准站数据存储与输出要求

北斗地基增强系统基准站数据 存储和输出要求
Data storing and exporting requirements for reference station of BDS ground-based augmentation system
2017-05-09 发布
2017-06-01 实施
表 2 监测站数据采样率
数据类型 原始观测数据
站点信息 定位结果 差分数据产品
采样率 1s
一次性记录,变更时更新 1s
按接收的差分数据产品频率存储
6.2.3 区域基准站
6.2.3.1 按天存储文件,文件的起止时间为:北斗时(BDT)0 时 0 分 0 秒~23 时 59 分 59 秒。 6.2.3.2 数据采样率见表 3。 6.2.3.3 数据存储能力应大于 30 天。 6.2.3.4 数据存储的卫星截止高度角应不大于 10°。
BD 440017-2017
目次
前言 ............................................................................... III 1 范围 .............................................................................. 1 2 规范性引用文件 .................................................................... 1 3 术语及定义 ........................................................................ 1 4 缩略语 ............................................................................ 1 5 数据分类 .......................................................................... 2
GPS北斗BD转发器GNSS-T6100 Signal Transponder
GNSS-T6100Signal Transponder使用手册深圳市因络通讯技术有限公司目录1功能描述 (1)2应用场合 (3)3配置清单 (4)4系统原理图 (4)5相关配件参数 (5)5.1有源接收天线 (5)5.2无源发射天线 (7)5.3射频线缆组件 (9)6操作说明 (12)6.1键盘操作 (12)6.2软件操作 (13)7故障排查 (14)8质量承诺 (14)9保养及售后服务 (14)9.1保养 (14)9.2注意事项 (14)9.3投诉建议 (15)1功能描述GNSS-T6100Signal Transponder系列可以接收室外GPS/北斗BD/GLONASS等一种或者多种卫星信号,经滤波、放大、信号分配、信号调节、转发等环节,把卫星信号转入室内或其它卫星信号偏弱(不能到达)的地方,使得各项测试工作在室内即可正常完成。
GNSS-T6100系列具有功耗低,安装简单,信号稳定且增益可调等特点,具体配置如下:◆GPS(1575MHz),北斗BD(1561MHz),GLONASS(1602MHz)等单系统卫星信号频点;◆GPS(1575MHz),北斗BD(1561MHz),GLONASS(1602MHz)任意两系统二频卫星信号频点组合;◆GPS(1575MHz),北斗BD(1561MHz),GLONASS(1602MHz)三系统三频卫星信号频点;◆GPS L1/L2,BD2B1/B2/B3,GLONASS G1/G2三系统七频卫星信号频点;◆其它特殊卫星频点,如Galileo,BD1L/S等;主机配置参数Parameters可选频率Optional Frequency(MHz)GPS(L1:1575±12,L2:1227±12)GLONASS(G1:1609±7,G2:1252±7)BD2(B1:1561±2,B2:1207±10,B3:1268±10)增益Gain(dB)(40~50)±1程控衰减Programmable Attenuation(dB)0~31噪声系数Noise Figure(dB)<2.0阻抗Impedance(Ω)50驻波比Standing-wave Ratio(VSWR)<2.0信号输出Signal Output4组接口类型Connector Type N-K(输入);SMA-K(输出)供电电压Voltage(V)110-240V AC工作温度Operating Temperature(°C)-30~+85外型尺寸Dimensions(mm)235(W)×305(D)×150(H)2应用场合卫星导航及周边电子产品生产线(智能手机、平板电脑、追踪定位器、车载DVD、导航仪、天线、模块、电子狗、行车记录仪…),学校实验室、大厦停车场、卖场、航空航天制造及维修等各种场合。
北斗卫星导航系统测量型终端通用规范
北斗卫星导航系统位置报告/短报文型终端通用规范(预)2014.08.141范围本通用规范规定了北斗卫星导航系统位置报告/短报文型终端(简称为北斗通信终端)的技术要求(包括一般要求、功能要求、性能要求、环境适应性要求)、试验方法、检验规则、以及包装、运输和储存等要求。
本标准适用于北斗通信终端的研制、生产和使用,也是制定北斗通信终端产品标准、检验产品质量和产品应用选型的依据。
2规范性引用文件下列文件对于本文件的应用是必不可少的。
凡是注日期的引用文件,仅注日期的版本适用于本文件。
凡是不注日期的引用文件,其最新版本(包括所有的修改单)适用于本文件。
•GB/T 191 包装储运图示标志•GB 2312—1980 信息交换用汉字编码字符集基本集•GB/T 2828.1—2003 计数抽样检验程序第1部分:按接收质量限(AQL)检索的逐批检验抽样计划•GB 4208—2008 外壳防护等级(IP代码)•GB/T 4857.5 包装运输包装件跌落试验方法•GB/T 5080.1—1986 设备可靠性试验总要求•GB/T 5080.7—1986 设备可靠性试验恒定失效率假设下的失效率与平均无故障时间的验证试验方案•GB/T 5296.1—1997消费品使用说明总则•GB/T 12267—1990 船用导航设备通用要求和试验方法•GB/T 12858—1991地面无线电导航设备环境要求和试验方法•GB/T 13384—2008 机电产品包装通用技术条件•GB 15702—1995 电子海图技术规范•GB 15842—1995移动通信设备安全要求和试验方法•GB/T 17626.3—2006 电磁兼容试验和测量技术射频电磁场辐射抗扰度试验3术语、定义和缩略语3.1 术语和定义下列术语和定义适用于本标准。
3.1.1北斗卫星导航系统 BeiDou navigation satellite system中国的全球卫星导航系统,简称北斗系统(BeiDou)。
北斗一号用户机数据接口要求(2.1版)

其前两个字符是询问装置的发送器标识符,接着两个字符是被询问装置的发送器标识 符,最后一个字符是询问字符“Q”。
3.3.2.2 数据字段 3.3.2.2.1 概述 语句中的数据字段跟在定界符“,”和一定的有效字符(和编码定界符“^”)之后。 专有语句中的数据字段只包含有效字符和定界符“,”与“^”。 由于存在变长数据字段和空字段,只有通过观察字段定界符“,”才能确定特殊数据 字段在一条语句中的位置。因而对于接收器来说,要通过定界符的计数来确定字段位置, 而不应该从语句的开始对接收到的总个数来计数。 对于固定长度的数字字段,如果有效数据位长度不够,则应在前面补上足够数量的 ASCII 码字符“0”,以满足长度要求。 3.3.2.2.2 数据字段的类型 数据字段可以是字母型、数据型、字母数据型、可变长度、固定长度和固定/可变长 度。有些字段是常量,其值由专门的语句规定,允许使用的字段类型见表 4。
GB/T 6107—2000 使用串行二进制数据交换的数据终端设备和数据电路终接设备之间 的接口
GB/T 11014—1989 平衡电压数字接口电路的电气特性
3 要求
3.1 硬件 3.1.1 概述
北斗终端应可以通过一根连接线缆并入连接多个接收器。接收器的数目取决于发送器 的输出驱动能力、终端的输入驱动要求和是否使用终端电阻器。
RMC
推荐最简导航传输数据
TXT
文本信息
VTG
航塔和地速信息
ZBS
输入坐标参数
ZDA
UTC 时间、日期和本地时区等信息
7 / 79
ZTI
用户设备状态信息
RDSS 语句
BSI
接受波束状态信息
BSS
设置响应波束与时差波束
CXA
全球导航卫星系统(GNSS)信号采集回放仪校准规范JJF(通信) 042-2020
目录引言 (II)1范围 (1)2引用文件 (1)3术语和计量单位 (1)3.1采集带宽(MHz) (1)3.2回放信号频率 (1)4概述 (1)5计量特性 (2)5.1采集回放频点 (2)5.2采集带宽 (2)5.3回放信号频率频差 (2)5.4回放信号功率 (2)5.5内部时基 (2)6校准条件 (3)6.1环境条件 (3)6.2测量标准及其他设备 (3)6.2.1信号发生器 (3)6.2.2频谱分析仪 (3)6.2.3测量接收机 (3)6.2.4GNSS导航模拟器 (3)6.2.5GNSS导航接收机 (4)6.2.6频标比对器 (4)6.2.7微波计数器 (4)6.2.8参考时间频率源 (4)7校准项目和校准方法 (4)7.1校准项目 (4)7.2校准方法 (5)8校准结果表达 (8)9复校时间间隔 (8)附录A推荐校准记录格式 (9)附录B推荐证书内页格式 (11)附录C测量结果的不确定度评定实例 (13)引言本规范依据国家计量技术规范JJF1071-2010《国家计量校准规范编写规则》、JJF1001-2010《通用计量术语及定义》、JJF1059.1-2012《测量不确定度评定与表示》编制。
本规范参考了国家标准GB/T19391-2003《全球定位系统(GPS)术语及定义》、JJG180-2002《电子测量仪器内石英晶体振荡器》的相关内容。
本规范为首次制定。
全球导航卫星系统(GNSS)信号采集回放仪校准规范1范围本规范适用于GNSS信号采集回放仪(以下简称采集回放仪)的校准。
2引用文件本规范引用了下列文件:JJG180-2002《电子测量仪器内石英晶体振荡器》GB/T19391-2003《全球定位系统(GPS)术语及定义》凡是注日期的引用文件,仅注日期的版本适用于本规范;凡是不注日期的引用文件,其最新版本(包括所有的修改单)适用于本规范。
3术语和计量单位下列术语和定义适用于本规范。
3.1采集带宽(MHz)采集回放仪采集GNSS载波频点或通道中心频率时,载波频点或中心频率左右功率下降3dB时的频带宽度。
国产GPS接收机数据转换设置和TGO静态处理

国产GPS接收机数据转换设置和TGO静态处理数据转换设置和,,,静态处理一、数据转换1.1 华测GPS接收机采集数据转换和设置1.1.1 数据格式转换将外业采集的数据导入到计算机~保存为HCN格式~将HCN格式数据导入到华测静态数据处理软件~如图1-1所示。
图1-1 华测自带的数据格式转换为RINEX格式数据右键单击需要转换的观测点~在弹出菜单上单击转换成RINEX格式~则软件将HCN格式GPS数据转换为RINEX格式数据~并自动保存在工程项目文件夹下的Rinex文件下~如图1-2所示。
图1-2 数据格式转换的结果自动保存在工程项目文件下将转换后的RINEX格式的GPS数据文件导入到TGOGPS数据处理软件中~如图1-3所示~在根据野外观测记录修改接收机类型、天线类型、天线高度等信息,如图1-4所示,~再根据TGO数据处理软件的数据处理方法处理野外采集的GPS数据~后面一章将详细介绍。
图1-3 将转换后的RINEX格式文件导入到TGO软件图1-4 根据野外观测记录~修改接收机类型、天线高度、天线类型等参数图1-5 利用TGO软件处理野外观测数据1.1.2 GPS接收机参数设置在华测GPS静态处理软件模块安装目录下找到HcLoader工具~如图1-6所示~打开数据下载工具模块~如图1-7所示~单击设置工具栏~弹出GPS接收机参数设置对话框~可在该对话框中设置GPS接收机的参数。
图1-6 数据下载工具图1-7 GPS参数设置界面1.2 中海达GPS接收机采集数据转换和设置1.2.1 数据格式转换将外业采集的数据导入到计算机~保存为ZHD格式~将ZHD格式数据导入到中海达数据处理软件~如图1-6所示。
图1-8 中海达数据格式转换为RINEX格式数据右键单击需要转换的观测点~在弹出菜单上单击转换成RINEX格式~则软件将ZHD格式GPS数据转换为RINEX格式数据~并自动保存在工程项目文件夹下的Rinex文件下~如图1-7所示。
GPS+北斗BD双模接收机模块ATGM330B
BD2/GPS双模接收机模块ATGM330B规格书版本更新历史版本日期更新内容1.0 2012/11/20 初稿1功能描述1.1概述ATGM330B是高灵敏度BD2/GPS双模接收机模块,支持GPS和BD2的单系统定位和双系统联合定位。
其中的射频前端芯片和基带芯片全部为本公司独立研发,拥有自主知识产权。
ATGM330B包含32个跟踪通道,可以同时接收所有的GPS和BD2可见卫星。
ATGM330B可以直接替换REB-3571LP,ZYM-GA71等多款GPS模块,主要接口信号Pin-Pin兼容,安装孔一致。
1.2关键特性z高灵敏度:-160dBmz支持BD2、GPS的单系统定位和双系统联合定位z低功耗:小于280mW(双模连续跟踪并且定位)1.3应用z车载导航z个人手持导航z授时2技术描述2.1外观尺寸(单位:mm )2.2 PCB layout2.3管脚定义引脚编号名称I/O 描述电气特性1 VCC 系统电源直流 3.3V±5%2 GND 系统地3 nBOOT I 程序升级使用。
如不用,可悬空。
TTL电平;Vih≥0.7*Vcc;Vil≤0.3*Vcc4 RXD1 I 串行数据输入或用户自定TTL电平;Voh≥2.4V;Vol≤0.4V;Ioh=Iol=2mA5 TXD1 O 导航数据输出或用户自定义TTL电平;Voh≥2.4V;Vol≤0.4V;Ioh=Iol=2mA6 TXD2 O 串口输出或用户自定义TTL电平;Voh≥2.4V;Vol≤0.4V;Ioh=Iol=2mA7 RXD2 I 串行数据输入或用户自定TTL电平;Voh≥2.4V;Vol≤0.4V;Ioh=Iol=2mA8 nPWRDN I 系统电源控制如不用,可悬空。
POWER ON=1 系统默认;POWER OFF=09 GPIO1 I/O10 GND 系统地11 RF-GND PWR 模拟地12 RF-GND PWR 模拟地13 RF-GND PWR 模拟地14 RF-GND PWR 模拟地15 RF-GND PWR 模拟地16 RF-GND PWR 模拟地17 RF-IN I 天线信号输入18 RF-GND PWR 模拟地19 ANT_PWR PWR 天线电源以天线要求决定20 VCC_RF PWR 输出电源+3.3V,可给天线供电21 VCC_BACKUP PWR RTC及SRAM后备电源提供+3.0~+4.2V电源以保证GPS热启动22 nRESET I 系统复位如不用,可悬空。
北斗星通BDX-500 GNSS接收机产品说明书
产品说明书产品名称:产品型号:修订日期:GNSS接收机BDX-500 2019.10.01目录第一章产品概述 (3)1.1. 产品介绍 (3)1.2. 主要特点 (3)1.3. 接收机主要参数 (3)1.4. 物品清单 (5)第二章硬件组成 (5)2.1机械尺寸 (5)2.2接口说明 (6)2.3指示灯说明 (7)第三章产品安装说明 (8)3.1硬件连接 (8)第四章报文解析 (16)4.1常用报文解析 (16)第一章产品概述1.1.产品介绍BDX-500GNSS接收机采用自主研发的北斗+GPS+GLONASS三星主板,浓缩国内外GNSS行业的先进技术,具有抗干扰能力强、定位速度快、精度高的特点,是国内高精度GNSS 测量系统的典范。
BDX-500接收机分为电台版和网络版两款,外观如图1-1所示。
图1-1BDX-500GNSS接收机1.2.主要特点❖多种模式定位双天线输入,支持BD B1/B2,GPS L1/L2,GLONASS G1/G2三系统六频信号;❖高精度测姿功能,航向角、横滚与俯仰角;❖高精度、高可靠性、高稳定性;❖支持以太网、4G/UHF通讯;1.3.接收机主要参数表1-1BDX-500主要参数信号跟踪GPS L1,L2 BDS B1,B2 GLONASS G1,G2首次定位时间冷启动<60s 温启动<30s 热启动<10s数据精度(RMS)单机定位精度 1.5m静态精度水平:±(2.5+1×10-6×D)mm垂直:±(5+1×10-6×D)mm RTK精度水平:±(10+1×10-6×D)mm垂直:±(20+1×10-6×D)mm 差分定位精度0.3-0.6mRTK初始化时间<10s(基线长小于20km)初始化置信度>99.9%测速精度0.05m/s航向精度天线间距1.0米:<0.2度天线间距2.0米:<0.1度数据格式标准NMEA-0183CMR/RTCM2.X/RTCM3.X动态性能高度18000m 速度515m/s加速度4g数据刷新率最高20Hz环境参数工作温度-40℃~+70℃存储温度-45℃~+85℃湿度95%无冷凝防水IP67级标准电气参数供电电压9-36VDC,带正负级反接保护功耗<7W物理特性物理尺寸196mm×152mm×78mm重量<1.5Kg撞击和振动抗2m跌落,满足车辆振动要求指示6个LED指示灯1.4.物品清单表1-2为用户购买BDX-500接收机时包含的物品的详细清单。
GPS北斗双模授时器产品说明书v1.0_LOGO

GPS/北斗双模授时器GPS/BD X产品说明书苏州全波通信技术有限公司目录1产品简介 (3)1.1功能介绍 (3)1.2系统框图 (3)图1 GPS/北斗双模授时器GPS/BD X系统框图 (3)2产品结构 (4)2.1结构图 (4)图2 GPS/北斗双模授时器GPS/BD X结构图 (4)2.2产品前面板图 (5)图3 GPS/北斗双模授时器GPS/BD X前面板图 (5)2.3产品后面板图 (5)图4 GPS/北斗双模授时器GPS/BD X后面板图 (5)3主要特性和技术说明 (7)3.1主要特性 (7)3.2技术说明 (7)表1 GPS/北斗双模授时器GPS/BD X物理参数 (7)表2 GPS/北斗双模授时器GPS/BD X技术参数 (8)4全中文操作界面使用说明 (10)4.1开机 (10)4.2待机模式 (10)4.3查询模式 (10)表3 查询模式下的界面1 (10)表4 查询模式下的界面2 (11)4.4全中文操作界面使用说明 (11)图5 授时器状态参数 (12)图6 授时器系统参数 (13)5监控数据帧格式 (14)1产品简介1.1功能介绍本公司研发的GPS/北斗双模授时器具备同时接收GPS 系统和北斗系统共同提供的时间信息和定时信号功能,当其中一套系统失效时能自动切换到另一套系统继续稳定工作,能为网络设备提供精确、标准、安全、可靠的时间服务。
本产品采用模块化设计,精度高、性能好、功能强、功耗低,无积累误差,不受地域气候等环境条件限制,全自动智能化运行,操作简单,免维护,适合无人值守。
本产品可为广电单频网系统、计算机网络系统、电力自动化系统、水利自动化系统、电子商务系统等提供精密的标准时间信号和时间戳服务,已经被成功应用在广电、交通、金融、通信、安防、电力、水利、医疗、教育、IT 等领域。
本产品采用全中文操作界面,可通过RJ45接口、按键进行系统控制和监测。
本产品支持远程升级,可通过RJ45口完成对授时器的系统升级。
厦门才茂BD GPS终端 CM410 使用手册说明书
厦门才茂BD/GPS终端CM410使用手册厦门才茂通信科技有限公司厦门市集美区软件园三期诚毅北大街63号901、904单元电话:传真:邮政编码:361009网址:版权所有2003-2009----才茂通信通畅天下----说明书声明版权声明:本使用说明书包含的所有内容均受版权法的保护,未经厦门才茂通信科技有限公司的书面授权,任何组织和个人不得以任何形式或手段对整个说明书和部分内容进行复制和转载,并不得以任何形式传播。
商标声明:Cai more和其他才茂商标均为厦门才茂通信科技有限公司的商标。
本文档提及的其他所有商标或注册商标,由各自的所有人拥有。
注意由于产品版本升级或其他原因,本文档内容会不定期进行更新。
除非另有约定,本文档仅作为使用指导,本文档中的所有陈述、信息和建议不构成任何明示或暗示的担保。
版本说明文档版本修改说明发布日期作者签发V1.0初版定稿2012.05.13Lifw LifwV1.1使用串口助手进行GPS参数配置2015.05.19Huangjh Lifw目录目录 (3)第一章产品简介 (4)1.1产品概述 (4)1.2产品特点 (6)1.3技术参数 (6)第二章安装 (9)2.1概述 (9)2.2开箱 (9)2.3产品说明 (9)2.3.1外形尺寸: (9)2.3.2天线安装 (10)2.3.3安装电缆 (10)2.4供电电源 (10)2.5导轨安装 (10)第三章BD/GPS功能详细配置 (11)3.1NMEA输出语句对比表格 (11)3.2参数设置方法 (11)3.2.1CAS00指令 (13)3.2.2CAS01指令 (13)3.2.3CAS02指令 (14)3.2.4CAS03指令 (14)3.2.5CAS04指令 (15)3.2.6CAS06指令 (15)3.2.7CAS10指令 (16)附件一:指示灯的说明 (17)附件二:设备功耗 (17)附件三:协议介绍 (18)NMEA输出语句对比表格 (18)NMEA输出格式 (18)GGA语句格式: (18)GLL语句格式: (19)GSA语句格式: (20)GSV语句格式: (20)RMC语句格式: (21)VTG语句格式: (22)ZDA语句格式: (23)附件四:常见故障分析 (24)第一章产品简介1.1产品概述CAIMORE BD/GPS(BeiDou Navigation Satellite System/Global Positioning System,全称北斗卫星导航系统加全球定位系统,本文简称BD/GPS)支持BD2B1和GPS L1两个频点,并行双32通道,在BD模式中,快速定位,为服务区域内的用户提供全天候、实时定位服务,定位精度与GPS民用定位精度相当;短报文通信,一次可传送多达120个汉字的信息;精密授时,精度达20纳秒。
北斗卫星导航系统测量型模块技术要求及测试方法-最新国标
北斗卫星导航系统测量型模块技术要求及测试方法1范围本标准规定了北斗卫星导航系统测量型模块(以下简称模块)的技术要求和测试方法。
本标准适用于北斗卫星导航系统测量型模块的设计、生产、研制、检测和维护。
2规范性引用文件下列文件中的内容通过文中的规范性引用而构成本文件必不可少的条款。
其中,注日期的引用文件,仅该日期对应的版本适用于本文件;不注日期的引用文件,其最新版本(包括所有的修改单)适用于本文件。
GB/T39267-2020北斗卫星导航术语BD410002A-2022北斗/全球卫星导航系统(GNSS)接收机差分数据格式(一)BD410003A-2022北斗/全球卫星导航系统(GNSS)接收机差分数据格式(二)BD410004-2015北斗/全球卫星导航系统(GNSS)接收机导航定位数据输出格式3术语、定义和缩略语3.1术语和定义“GB/T39267-2020北斗卫星导航术语”界定的以及下列术语和定义适用于本文件。
3.1.1捕获灵敏度acquisition sensitivity用户设备在冷启动条件下,捕获导航信号并正常定位所需的最低信号电平。
[来源:GB/T39267-2020,5.2.7]3.1.2跟踪灵敏度tracking sensitivity用户设备在正常定位后,能够继续保持对导航信号的跟踪和定位所需的最低信号电平。
[来源:GB/T39267-2020,5.2.8]3.1.3冷启动cold start用户设备在星历、历书、概略时间和概略位置未知的状态下,从开机到正常定位的状态。
3.1.4热启动hot start用户设备在星历、历书、概略时间和概略位置已知的状态下,从开机到正常定位的状态。
3.1.5首次定位时间time to first fix用户设备开机至获得首次正确定位所需的时间。
[来源:GB/T39267-2020,5.1.40]3.1.6内部噪声水平interior noise level由测量型模块通道间的随机偏差,锁相环、码跟踪环的随机偏差,以及其钟差残差等引起的测距和测相误差。
北斗卫星bd标准
北斗卫星标准
北斗卫星导航系统(BeiDou Navigation Satellite System,简称北斗系统)是中国自主研发的卫星导航系统。
其标准体系包括了一系列技术规范和标准,以确保系统的正常运行和与其他导航系统的兼容性。
北斗系统的标准体系主要涉及信号与导航标准。
具体来说,北斗系统采用了多频多制式的导航信号,以提供更准确、可靠的导航服务。
相关的标准规定了各个信号的频率、编码方式、调制方式等技术参数。
另外,北斗系统的标准体系还包括卫星和地面站的相关标准,例如卫星设计、制造、试验、发射等标准和地面站的建设、运行、维护等标准。
这些标准确保了北斗系统的可靠性和稳定性。
总的来说,北斗系统的标准体系是一个综合性的体系,涵盖了从信号到硬件等多个方面,为整个系统的正常运行提供了有力保障。
如需了解更多有关北斗卫星导航系统的标准体系的信息,建议访问中国卫星导航系统管理办公室官网或咨询相关专家。
3-北斗-全球卫星导航系统(GNSS)接收机数据自主交换格式BD410001-2015
BD 410001-2015
目次
前 言 ................................................................................ V 引 言 .............................................................................. VII
bd4100012015北斗全球卫星导航系统gnss接收机数据自主交换格式beidouglobalnavigationsatellitesystemgnssreceiverindepedentexchangeformat20151101实施20151019发布bd410001201531术语和定义32缩略语41gnss接收机数据自主交换格式文件411文件类型412文件结构413文件格式414文件名称415卫星系统及编号416时间系统标识符42文件头部分421基本格式422头记录标识423头记录的排列顺序424头记录信息未知项的处理425头部分的读取426时间系统gnss观测数据文件51观测量511观测时刻513载波相位514多普勒变化值515其他观测量52基础观测量的修正521伪距观测值的系统时间差修正522接收机钟差修正53gnss观测数据文件的头部分bd4100012015531组成532文件生成时间10533观测值代码10534特殊观测值代码13535观测值代码与观测值记录的对应14536测站点类型14537比例因子15538运动物体上的数据记录15539码间偏差的修正155310天线相位中心偏差修正155311gnss观测数据文件的头部分格式1554gnss观测数据文件的数据部分20541观测数据的记录规则21542信号强度23543半波长观测数据半周模糊度的记录23544gnss观测数据文件数据部分的格式gnss导航数据文件2561gnss导航数据文件的头部分2562gnss导航数据文件的数据部分26621概述26622常用参数27623gnss导航数据文件gps数据27624gnss导航数据文件glonass数据29625gnss导航数据文件galileo数据29626gnss导航数据文件bds数据31627gnss导航数据文件qzss数据32628gnss导航数据文件sbas数据3471概述3472气象数据文件的头部分3473气象数据文件的数据部分37资料性附录37a1gnss观测数据文件示例37a2gnss导航数据文件示例39a21gps导航数据文件示例39a22glonass导航数据文件示例40a23galileo导航数据文件示例41bd4100012015iiia24bds导航数据文件示例41a25qzss导航数据文件示例43a26sbas导航数据文件示例44a3气象数据文件示例44bd410
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
BD 410001-2015
北斗/全球卫星导航系统(GNSS)接收机 数据自主交换格式
BeiDou/Global Navigation Satellite System (GNSS) receiver indepedent exchange format
2015-10-19 发布
2015-11-01 实施
1
BD 410001-2015
目次
前 言 .................................................. V 引 言 .............................................................................. VII
4.1.1 文件类型 ................................................................. 2 4.1.2 文件结构 ................................................................. 2 4.1.3 文件格式 ................................................................. 3 4.1.4 文件名称 ................................................................. 3 4.1.5 卫星系统及编号 ........................................................... 4 4.1.6 时间系统标识符 ........................................................... 4 4.2 文件头部分 ................................................................... 5 4.2.1 基本格式 ................................................................. 5 4.2.2 头记录标识 ............................................................... 5 4.2.3 头记录的排列顺序 ......................................................... 5 4.2.4 头记录信息未知项的处理 ................................................... 5 4.2.5 头部分的读取 ............................................................. 5 4.2.6 时间系统 ................................................................. 5 5 GNSS 观测数据文件 .................................................................. 6 5.1 观测量 ....................................................................... 6 5.1.1 观测时刻 ................................................................. 6 5.1.2 伪距 ..................................................................... 6 5.1.3 载波相位 ................................................................. 7 5.1.4 多普勒变化值 ............................................................. 7 5.1.5 其他观测量 ............................................................... 7 5.2 基础观测量的修正 ............................................................. 7 5.2.1 伪距观测值的系统时间差修正 ............................................... 7 5.2.2 接收机钟差修正 ........................................................... 9 5.3 GNSS 观测数据文件的头部分 ..................................................... 9
1 范围 .............................................................................. 1 2 规范性引用文件 .................................................................... 1 3 术语、定义和缩略语 ................................................................ 1
I
BD 410001-2015
5.3.1 组成 ..................................................................... 9 5.3.2 文件生成时间 ............................................................ 10 5.3.3 观测值代码 .............................................................. 10 5.3.4 特殊观测值代码 .......................................................... 13 5.3.5 观测值代码与观测值记录的对应 ............................................ 14 5.3.6 测站点类型 .............................................................. 14 5.3.7 比例因子 ................................................................ 15 5.3.8 运动物体上的数据记录 .................................................... 15 5.3.9 码间偏差的修正 .......................................................... 15 5.3.10 天线相位中心偏差修正 ................................................... 15 5.3.11 GNSS 观测数据文件的头部分格式 ........................................... 15 5.4 GNSS 观测数据文件的数据部分 .................................................. 20 5.4.1 观测数据的记录规则 ...................................................... 21 5.4.2 信号强度 ................................................................ 23 5.4.3 半波长观测数据,半周模糊度的记录 ........................................ 23 5.4.4 GNSS 观测数据文件数据部分的格式 .......................................... 23 6 GNSS 导航数据文件 ................................................................. 25 6.1 GNSS 导航数据文件的头部分 .................................................... 25 6.2 GNSS 导航数据文件的数据部分 .................................................. 26 6.2.1 概述 .................................................................... 26 6.2.2 常用参数 ................................................................ 27 6.2.3 GNSS 导航数据文件——GPS 数据 ............................................ 27 6.2.4 GNSS 导航数据文件——GLONASS 数据 ........................................ 29 6.2.5 GNSS 导航数据文件——Galileo 数据 ........................................ 29 6.2.6 GNSS 导航数据文件——BDS 数据 ............................................ 31 6.2.7 GNSS 导航数据文件——QZSS 数据 ........................................... 32 6.2.8 GNSS 导航数据文件——SBAS 数据 ........................................... 34 7 气象数据文件 ..................................................................... 34 7.1 概述 ........................................................................ 34 7.2 气象数据文件的头部分 ........................................................ 34 7.3 气象数据文件的数据部分 ...................................................... 36 附 录 A ........................................................................... 37 (资料性附录) ....................................................................... 37 A.1 GNSS 观测数据文件示例 .......................................................... 37 A.2 GNSS 导航数据文件示例 .......................................................... 39 A.2.1 GPS 导航数据文件示例 ....................................................... 39 A.2.2 GLONASS 导航数据文件示例 ................................................... 40 A.2.3 Galileo 导航数据文件示例 ................................................... 41