信号与系统试题库-整理
(完整版)信号与系统复习题
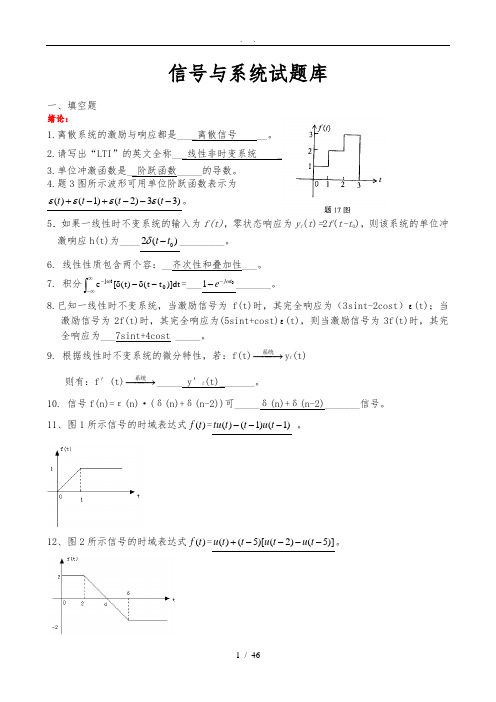
信号与系统试题库一、填空题绪论:1。
离散系统的激励与响应都是____离散信号 __。
2.请写出“LTI ”的英文全称___线性非时变系统 ____。
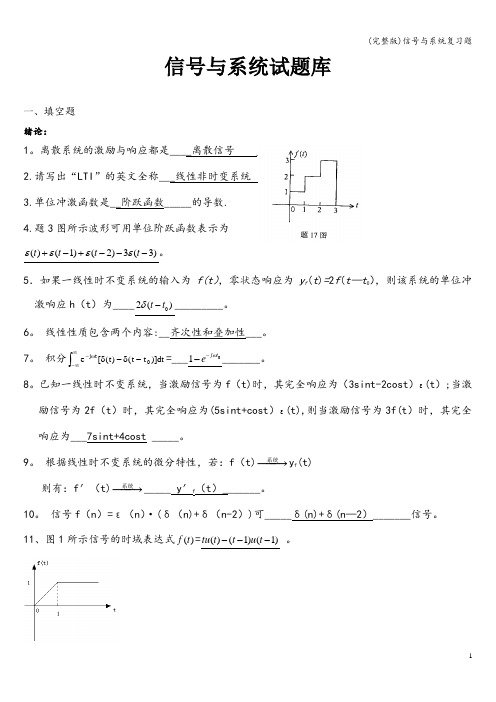
3.单位冲激函数是__阶跃函数_____的导数. 4.题3图所示波形可用单位阶跃函数表示为()(1)(2)3(3)t t t t εεεε+-+---。
5.如果一线性时不变系统的输入为f(t ),零状态响应为y f (t )=2f (t —t 0),则该系统的单位冲激响应h (t )为____02()t t δ-_________。
6。
线性性质包含两个内容:__齐次性和叠加性___。
7。
积分⎰∞∞-ω--δ-δdt )]t t ()t ([e 0t j =___01j t e ω--_______。
8。
已知一线性时不变系统,当激励信号为f (t)时,其完全响应为(3sint-2cost )ε(t );当激励信号为2f (t )时,其完全响应为(5sint+cost )ε(t),则当激励信号为3f(t )时,其完全响应为___7sint+4cost _____。
9。
根据线性时不变系统的微分特性,若:f (t)−−→−系统y f (t)则有:f ′(t)−−→−系统_____ y ′f (t )_______。
10。
信号f (n )=ε(n )·(δ(n)+δ(n-2))可_____δ(n)+δ(n —2)_______信号。
11、图1所示信号的时域表达式()f t =()(1)(1)tu t t u t --- 。
12、图2所示信号的时域表达式()f t =()(5)[(2)(5)]u t t u t u t +----。
13、已知()()()2f t t t t εε=--⎡⎤⎣⎦,则()f t '=()(2)2(2)u t u t t δ----.14、[]2cos32t d ττδτ-∞⎛⎫+ ⎪⎝⎭⎰=8()u t 。
信号与系统复习试题(含答案)
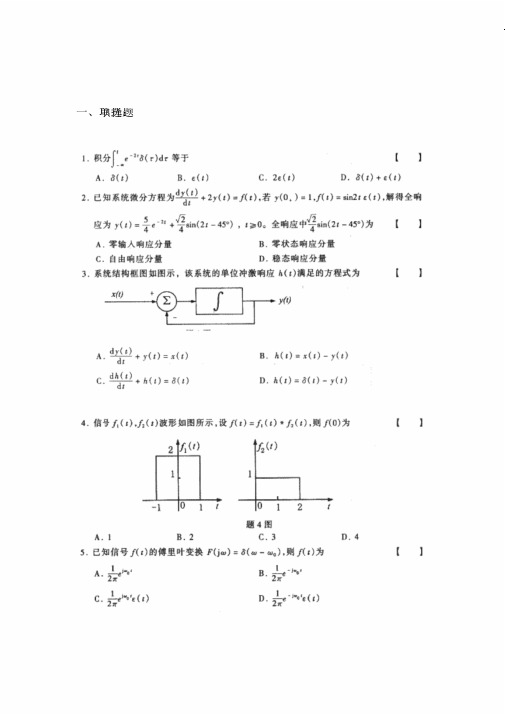
76.某二阶LTI系统的频率响应H (j)
A.y2y3y
B。y3y2yf2
D。y3y2yf
H(s)的共轭极点在虚轴上,则它的
2,-1,H ()1,则系统函数H(s)为(
C。(s1)(s2)
(t)的傅氏变换是(
B。j(
D。j(2
A.系统在(t)作用下的全响应
C.系统单位阶跃响应的导数
6。对于一个三阶常系数线性微分方程描述的连续时间系统进行系统的时域模拟时,所需积
分器数目最少是__3个_____个。
7。一线性时不变连续因果系统是稳定系统的充分且必要条件是系统函数的极点位于S平面
的___左半平面_______。
8.如果一线性时不变系统的单位冲激响应为h(t),则该系统的阶跃响应g(t)为
其中x(0)是初始状态,
f(t)为激励,y(t)为全响应,试回答该系统是否是线性的?[答案:非线性]
2.y'(t)sinty(t)f(t)试判断该微分方程表示的系统是线性的还是非线性的,
是时变的还是非时变的?[答案:线性时变的]
3.已知有限频带信号f(t)的最高频率为100Hz,若对f(2t)*f(3t)进行时域取样,
B。f(t)f(t8)
12
C.f(t)f(t8)
D。f(t3)f(t1)
69.已知一连续系统在输入f(t)的作用下的零状态响应为yzs(t)f(4t),则该系统为()
70.已知f(t)是周期为T的函数,f(t)-f (t
T)的傅里叶级数中,只可能有(
71.一个线性时不变的连续时间系统,其在某激励信号作用下的自由响应为(e
h(t)=(1et)(t),则其系统函数
15.已知一信号f(t)的频谱F(j)的带宽为,则f(2t)的频谱的带宽为
信号与系统复习题(含答案)
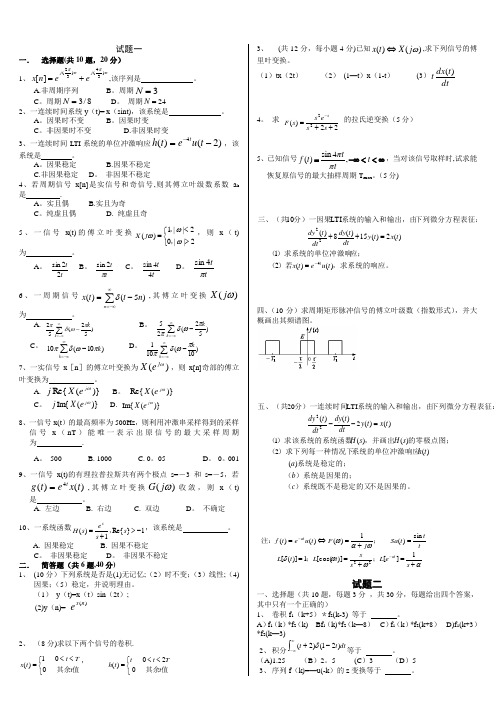
试题一一. 选择题(共10题,20分) 1、n j n j een x )34()32(][ππ+=,该序列是 。
A.非周期序列 B 。
周期3=N C 。
周期8/3=N D 。
周期24=N2、一连续时间系统y (t)= x (sint),该系统是 。
A 。
因果时不变B 。
因果时变C 。
非因果时不变 D.非因果时变 3、一连续时间LTI 系统的单位冲激响应)2()(4-=-t u e t h t ,该系统是 。
A 。
因果稳定 B.因果不稳定 C.非因果稳定 D 。
非因果不稳定4、若周期信号x[n]是实信号和奇信号,则其傅立叶级数系数a k 是 .A 。
实且偶 B.实且为奇 C 。
纯虚且偶 D. 纯虚且奇 5、一信号x(t)的傅立叶变换⎩⎨⎧><=2||02||1)(ωωω,,j X ,则x (t)为 。
A 。
t t 22sinB 。
tt π2sin C 。
t t 44sin D 。
t t π4sin6、一周期信号∑∞-∞=-=n n t t x )5()(δ,其傅立叶变换)(ωj X 为 。
A. ∑∞-∞=-k k )52(52πωδπ B 。
∑∞-∞=-k k )52(25πωδπC 。
∑∞-∞=-k k )10(10πωδπD 。
∑∞-∞=-k k)10(101πωδπ7、一实信号x [n ]的傅立叶变换为)(ωj e X ,则x[n]奇部的傅立叶变换为 。
A.)}(Re{ωj e X j B 。
)}(Re{ωj e XC 。
)}(Im{ωj e X j D. )}(Im{ωj e X8、一信号x(t )的最高频率为500Hz ,则利用冲激串采样得到的采样信号x (nT )能唯一表示出原信号的最大采样周期为 .A 。
500 B. 1000 C. 0。
05D 。
0。
0019、一信号x(t)的有理拉普拉斯共有两个极点s=-3和s=-5,若)()(4t x e t g t=,其傅立叶变换)(ωj G 收敛,则x (t)是 。
信号与系统复习题含答案完整版
信号与系统复习题含答案HEN system office room 【HEN16H-HENS2AHENS8Q8-HENH1688】(C ))(t δ+(-6e -t +8e -2t)u(t) (D )3)(t δ +(-9e -t +12e -2t)u(t)6、 连续周期信号的频谱具有(A ) 连续性、周期性 (B )连续性、收敛性 (C )离散性、周期性 (D )离散性、收敛性7、 周期序列2)455.1(0+k COS π的 周期N 等于(A) 1 (B )2 (C )3 (D ) 48、序列和()∑∞-∞=-k k 1δ等于(A )1 (B) ∞ (C) ()1-k u (D) ()1-k ku9、单边拉普拉斯变换()se s s s F 2212-+=的愿函数等于10、信号()()23-=-t u te t f t的单边拉氏变换()s F 等于二、填空题(共9小题,每空3分,共30分) 1、 卷积和[()k+1u(k+1)]*)1(k -δ=________________________2、 单边z 变换F(z)= 12-z z的原序列f(k)=______________________ 3、 已知函数f(t)的单边拉普拉斯变换F(s)=1+s s,则函数y(t)=3e -2t·f(3t)的单边拉普拉斯变换Y(s)=_________________________4、 频谱函数F(j ω)=2u(1-ω)的傅里叶逆变换f(t)=__________________5、 单边拉普拉斯变换s s s s s F +++=2213)(的原函数 f(t)=__________________________6、 已知某离散系统的差分方程为)1(2)()2()1()(2-+=----kf k f k y k y k y ,则系统的单位序列响应h(k)=_______________________7、 已知信号f(t)的单边拉氏变换是F(s),则信号⎰-=2)()(t dxx f t y 的单边拉氏变换Y(s)=______________________________ 8、描述某连续系统方程为 该系统的冲激响应h(t)=9、写出拉氏变换的结果()=t u 66 ,=k t 22三(8分)已知信号()()()⎪⎩⎪⎨⎧><==↔./1,0,/1,1s rad s rad jw F j F t f ωωω设有函数()(),dtt df t s =求⎪⎭⎫ ⎝⎛2ωs 的傅里叶逆变换。
信号与系统试题库整理
信号与系统试题库整理 IMB standardization office【IMB 5AB- IMBK 08- IMB 2C】信号与系统试题库一、选择题共50题1.下列信号的分类方法不正确的是(A):A、数字信号和离散信号B、确定信号和随机信号C、周期信号和非周期信号D、因果信号与反因果信号2.下列说法正确的是(D):A、两个周期信号x(t),y(t)的和x(t)+y(t)一定是周期信号。
B、两个周期信号x(t),y(t)的周期分别为2和2,则其和信号x(t)+y(t)是周期信号。
C、两个周期信号x(t),y(t)的周期分别为2和 ,其和信号x(t)+y(t)是周期信号。
D、两个周期信号x(t),y(t)的周期分别为2和3,其和信号x(t)+y(t)是周期信号。
3.下列说法不正确的是(D)。
A、一般周期信号为功率信号。
B、时限信号(仅在有限时间区间不为零的非周期信号)为能量信号。
C、ε(t)是功率信号;D、e t为能量信号;4.将信号f(t)变换为(A)称为对信号f(t)的平移或移位。
A、f(t–t0)B、f(k–k0)C、f(at)D、f(-t)5.将信号f(t)变换为(A)称为对信号f(t)的尺度变换。
A、f(at)B、f(t–k0)C、f(t–t0)D、f(-t)6.下列关于冲激函数性质的表达式不正确的是(B)。
A 、)()0()()(t f t t f δδ=B 、()t aat δδ1)(=C 、)(d )(t t εττδ=⎰∞-D 、)()-(t t δδ=7.下列关于冲激函数性质的表达式不正确的是(D )。
A 、⎰∞∞-='0d )(t t δB 、)0(d )()(f t t t f =⎰+∞∞-δC 、)(d )(t tεττδ=⎰∞-D 、⎰∞∞-=')(d )(t t t δδ8.下列关于冲激函数性质的表达式不正确的是(B )。
A 、)()1()()1(t f t t f δδ=+B 、)0(d )()(f t t t f '='⎰∞∞-δC 、)(d )(t tεττδ=⎰∞-D 、)0(d )()(f t t t f =⎰+∞∞-δ9.)1()1()2(2)(22+++=s s s s H ,属于其零点的是(B )。
信号与系统复习题(含答案)

.试题一一. 选择题(共10题,20分) 1、n j n j een x )34()32(][ππ+=,该序列是 。
A.非周期序列B.周期3=NC.周期8/3=ND. 周期24=N2、一连续时间系统y(t)= x(sint),该系统是 。
A.因果时不变B.因果时变C.非因果时不变D.非因果时变 3、一连续时间LTI 系统的单位冲激响应)2()(4-=-t u e t h t ,该系统是 。
A.因果稳定B.因果不稳定C.非因果稳定D. 非因果不稳定4、若周期信号x[n]是实信号和奇信号,则其傅立叶级数系数a k 是 。
A.实且偶B.实且为奇C.纯虚且偶D. 纯虚且奇 5、一信号x(t)的傅立叶变换⎩⎨⎧><=2||02||1)(ωωω,,j X ,则x(t)为 。
A. t t 22sinB. tt π2sin C. t t 44sin D.t t π4sin6、一周期信号∑∞-∞=-=n n t t x )5()(δ,其傅立叶变换)(ωj X 为 。
A. ∑∞-∞=-k k )52(52πωδπ B. ∑∞-∞=-k k )52(25πωδπC. ∑∞-∞=-k k )10(10πωδπD. ∑∞-∞=-k k)10(101πωδπ7、一实信号x[n]的傅立叶变换为)(ωj e X ,则x[n]奇部的傅立叶变换为 。
A.)}(Re{ωj e X j B. )}(Re{ωj e XC. )}(Im{ωj e X j D. )}(Im{ωj e X8、一信号x(t)的最高频率为500Hz ,则利用冲激串采样得到的采样信号x(nT)能唯一表示出原信号的最大采样周期为 。
A. 500B. 1000C. 0.05D. 0.001 9、一信号x(t)的有理拉普拉斯共有两个极点s=-3和s=-5,若)()(4t x e t g t =,其傅立叶变换)(ωj G 收敛,则x(t)是 。
A. 左边B. 右边C. 双边D. 不确定10、一系统函数1}Re{1)(->+=s s e s H s,,该系统是 。
信号与系统试题库

H ( s)
s2
1 2s
。 3
A 、 10 cos(100 t ) B、 10cos(200 t) C、 20 cos(100 t)
2、矩形信号 u(t 1) u(t 1) 的傅里叶变换为 B
。
D、 5 cos(200 t )
x (t ) +
+-
y(t)
2
3
66.某连续时间 LTI 因果系统的系统函数 H (s)
20. 某一个连续时间信号 x(t) 的傅里叶变换为 1 ,则信号 tx(t ) 的傅里叶变换为 j1
(1
1 j
)2 。
21.
sin 2t
2
(t)dt
t
4
。
22.信号 x(t ) 到 x(at ) 的运算中, 若 a>1,则信号 x(t ) 的时间尺度缩小 a 倍,其结果是将
34.连续时间信号
t2e
31. 系 统 输 入 为 x(t) , 响 应 为 y(t) 的 因 果 LTI 连 续 时 间 系 统 由 下 式 描 述 :
dy ( t)
2 y(t)
dx( t ) 3
x (t ) ,则系统的单位冲激响应为
h(t) =3 (t ) 5e 2t u(t) 。
dt
dt
32. 连续时间信号 te at u(t ) 的傅里叶变换为 (a
1 j
)2 。
33 卷积和 nu[n]* [ n 2] [n 2]u[n 2] 。
40.已知周期连续时间信号 x(t ) e j 0t ,则其傅里叶变换为 2 (
0) 。
41.如果对带限的连续时间信号 x(t) 在时域进行压缩, 其对应的频带宽度则会拓展; 而 对其在时域进行拓展,其对应的频带宽度则会压缩。 42.连续时间 LTI 系统的完全响应可以表示为零状态响应和零输入响应之和。 43.已知系统 1 和系统 2 的系统函数分别为 H 1 (s) 和 H 2 (s) ,则系统 1 和系统 2 在并联 后,再与系统 2 串联组成的复合系统的系统函数为 ( H 1( s) H 2 (s))H 2 (s) 。
信号与系统题库(完整版)

信号与系统题目部分,(卷面共有200题,0.0分,各大题标有题量和总分) 一、选择题(7小题,共0.0分)[1]题图中,若h '(0)=1,且该系统为稳定的因果系统,则该系统的冲激响应()h t 为。
A 、231()(3)()5tt h t e e t ε-=+- B 、32()()()tt h t e e t ε--=+C 、3232()()55tt e t e t εε--+D 、3232()()55tt e t e t εε--+-[2]已知信号x[n]如下图所示,则x[n]的偶分量[]e x n 是。
[3]波形如图示,通过一截止角频率为50rad sπ,通带内传输值为1,相移为零的理想低通滤波器,则输出的频率分量为() A 、012cos 20cos 40C C t C t ππ++ B 、012sin 20sin 40C C t C t ππ++ C 、01cos 20C C t π+ D 、01sin 20C C t π+[4]已知周期性冲激序列()()T k t t kT δδ+∞=-∞=-∑的傅里叶变换为()δωΩΩ,其中2TπΩ=;又知111()2(),()()2T T f t t f t f t f t δ⎛⎫==++⎪⎝⎭;则()f t 的傅里叶变换为________。
A 、2()δωΩΩ B 、24()δωΩΩ C 、2()δωΩΩ D 、22()δωΩΩ[5]某线性时不变离散时间系统的单位函数响应为()3(1)2()kkh k k k εε-=--+,则该系统是________系统。
A 、因果稳定B 、因果不稳定C 、非因果稳定D 、非因果不稳定 [6]一线性系统的零输入响应为(23kk --+)u(k), 零状态响应为(1)2()k k u k -+,则该系统的阶数A 、肯定是二阶B 、肯定是三阶C 、至少是二阶D 、至少是三阶 [7]已知某系统的冲激响应如图所示则当系统的阶跃响应为。
信号与系统试题库史上最全(内含答案)
信号与系统考试方式:闭卷 考试题型:1、简答题(5个小题),占30分;计算题(7个大题),占70分。
一、简答题:1.dtt df t f x e t y t )()()0()(+=-其中x(0)是初始状态,为全响应,为激励,)()(t y t f 试回答该系统是否是线性的?[答案:非线性]2.)()(sin )('t f t ty t y =+试判断该微分方程表示的系统是线性的还是非线性的,是时变的还是非时变的?[答案:线性时变的]3.已知有限频带信号)(t f 的最高频率为100Hz ,若对)3(*)2(t f t f 进行时域取样,求最小取样频率s f =?[答案:400s f Hz =]4.简述无失真传输的理想条件。
[答案:系统的幅频特性为一常数,而相频特性为通过原点的直线]5.求[]⎰∞∞--+dt t t e t )()('2δδ的值。
[答案:3]6.已知)()(ωj F t f ↔,求信号)52(-t f 的傅立叶变换。
[答案:521(25)()22j f t e F j ωω--↔]7.已知)(t f 的波形图如图所示,画出)2()2(t t f --ε的波形。
[答案: ]8.已知线性时不变系统,当输入)()()(3t e e t x t t ε--+=时,其零状态响应为)()22()(4t e e t y t t ε--+=,求系统的频率响应。
[答案:())4)(2(52)3(++++ωωωωj j j j ]9.求象函数2)1(32)(++=s s s F ,的初值)0(+f 和终值)(∞f 。
[答案:)0(+f =2,0)(=∞f ]10.若LTI 离散系统的阶跃响应为)(k g ,求其单位序列响应。
其中:)()21()(k k g k ε=。
[答案:1111()()(1)()()()(1)()()(1)222k k k h k g k g k k k k k εεδε-=--=--=--]11.已知()1 1 , 0,1,20 , k f k else ==⎧⎨⎩ ,()2 1 , 0,1,2,30 , k k f k else -==⎧⎨⎩设()()()12f k f k f k =*,求()3?f =。
信号与系统复习题含答案
试题一一. 选择题(共10题,20分) 1、n j n j een x )34()32(][ππ+=,该序列是 。
A.非周期序列B.周期3=NC.周期8/3=ND. 周期24=N 2、一连续时间系统y(t)= x(sint),该系统是 。
A.因果时不变B.因果时变C.非因果时不变D.非因果时变3、一连续时间LTI 系统的单位冲激响应)2()(4-=-t u e t h t ,该系统是。
A.因果稳定B.因果不稳定C.非因果稳定D. 非因果不稳定4、若周期信号x[n]是实信号和奇信号,则其傅立叶级数系数a k 是 。
A.实且偶B.实且为奇C.纯虚且偶D. 纯虚且奇 5、一信号x(t)的傅立叶变换⎩⎨⎧><=2||02||1)(ωωω,,j X ,则x(t)为 。
A. t t 22sinB. tt π2sin C. t t 44sin D.t t π4sin6、一周期信号∑∞-∞=-=n n t t x )5()(δ,其傅立叶变换)(ωj X 为 。
A. ∑∞-∞=-k k )52(52πωδπ B. ∑∞-∞=-k k )52(25πωδπC. ∑∞-∞=-k k )10(10πωδπD. ∑∞-∞=-k k)10(101πωδπ7、一实信号x[n]的傅立叶变换为)(ωj e X ,则x[n]奇部的傅立叶变换为 。
A.)}(Re{ωj e X j B. )}(Re{ωj e XC. )}(Im{ωj e X jD. )}(Im{ωj e X8、一信号x(t)的最高频率为500Hz ,则利用冲激串采样得到的采样信号x(nT)能唯一表示出原信号的最大采样周期为 。
A. 500B. 1000C. 0.05D. 0.0019、一信号x(t)的有理拉普拉斯共有两个极点s=-3和s=-5,若)()(4t x e t g t=,其傅立叶变换)(ωj G 收敛,则x(t)是 。
A. 左边B. 右边C. 双边D. 不确定10、一系统函数1}Re{1)(->+=s s e s H s,,该系统是 。
信号与系统试题库

1.下列信号的分类方法不正确的是( A ):A 、数字信号和离散信号B 、确定信号和随机信号C 、周期信号和非周期信号D 、因果信号与反因果信号2.下列说法正确的是( D ):A 、两个周期信号x (t ),y (t )的和x (t )+y(t )一定是周期信号。
B 、两个周期信号x (t ),y (t )的周期分别为2和2,则其和信号x (t )+y(t ) 是周期信号。
C 、两个周期信号x (t ),y (t )的周期分别为2和π,其和信号x (t )+y(t )是周期信号。
D 、两个周期信号x (t ),y (t )的周期分别为2和3,其和信号x (t )+y(t )是周期信号。
3.下列说法不正确的是( D )。
A 、一般周期信号为功率信号。
B 、 时限信号(仅在有限时间区间不为零的非周期信号)为能量信号。
C 、ε(t )是功率信号;D 、e t 为能量信号;4.将信号f (t )变换为( A )称为对信号f (t )的平移或移位。
A 、f (t –t 0) B 、f (k–k 0) C 、f (at ) D 、f (-t )5.将信号f (t )变换为( A )称为对信号f (t )的尺度变换。
A 、f (at ) B 、f (t –k 0) C 、f (t –t 0) D 、f (-t )6.下列关于冲激函数性质的表达式不正确的是( B )。
A 、)()0()()(t f t t f δδ=B 、()t aat δδ1)(=C 、)(d )(t tεττδ=⎰∞- D 、)()-(t t δδ=7.下列关于冲激函数性质的表达式不正确的是( D )。
A 、⎰∞∞-='0d )(t t δ B 、)0(d )()(f t t t f =⎰+∞∞-δC 、)(d )(t tεττδ=⎰∞- D 、⎰∞∞-=')(d )(t t t δδ8.下列关于冲激函数性质的表达式不正确的是( B )。
信号与系统试卷题库

信号与系统题库一.填空题1. 正弦信号)4/2.0sin(5)(ππ+=t t f 的周期为: 10 。
2.))()1((t e dtdt ε--=)(t e t ε-3.ττδd t⎰∞-)(=)(t ε4.⎰+---⋅325d )1(δe t t t = 5.⎰+∞∞--⋅t t d )4/(δsin(t)π=6. )(*)(t t εε=)(t t ε7. LTI 系统在零状态条件下,由引起的响应称为单位冲激响应,简称冲激响应。
8. LTI 系统在零状态条件下,由引起的响应称为单位阶跃响应,简称阶跃响应。
9. )(*)(t t f δ=)(t f10. )('*)(t t f δ=)('t f11. )(*)(21t f t f 的公式为 12. =2*)(t δ13. 当周期信号)(t f 满足狄里赫利条件时,则可以用傅里叶级数表示:∑∞=++=1110)]sin()cos([)(n n n t nw b t nw a a t f ,由级数理论可知:0a =,n a = ,n b = 。
14. 周期信号)(t f 用复指数级数形式表示为: ∑∞-∞==n tjnw neF t f 1)(,则n F = 。
15. 对于周期信号的重复周期T 和脉冲持续时间τ(脉冲宽度)与频谱的关系是: 当保持周期T 不变,而将脉宽τ减小时,则频谱的幅度随之 ,相邻谱线的间隔不变,频谱包络线过零点的频率,频率分量增多,频谱幅度的收敛速度相应变慢。
16. 对于周期信号的重复周期T 和脉冲持续时间τ(脉冲宽度)与频谱的关系是: 当保持周期脉宽τ不变,而将T 增大时,则频谱的幅度随之 ,相邻谱线的间隔变小,谱线变密,但其频谱包络线过零点的坐标。
17. 对于非周期信号)(t f 的傅里叶变换公式为:)(w F = 。
反变换公式:)(t f =18. 门函数⎪⎩⎪⎨⎧<=其他2||1)(ττt t g 的傅里叶变换公式为:19.)()(2t t εδ+的傅里叶变换为:20. te23-的频谱是。
(完整版)信号与系统试题库-整理

信号与系统试题库一、选择题共50题1.下列信号的分类方法不正确的是( A ):A、数字信号和离散信号B、确定信号和随机信号C、周期信号和非周期信号D、因果信号与反因果信号2.下列说法正确的是( D ):A、两个周期信号x(t),y(t)的和x(t)+y(t)一定是周期信号。
B、两个周期信号x(t),y(t)的周期分别为2和2,则其和信号x(t)+y(t)是周期信号。
C、两个周期信号x(t),y(t)的周期分别为2和 ,其和信号x(t)+y(t)是周期信号。
D、两个周期信号x(t),y(t)的周期分别为2和3,其和信号x(t)+y(t)是周期信号. 3。
下列说法不正确的是( D ).A、一般周期信号为功率信号。
B、时限信号(仅在有限时间区间不为零的非周期信号)为能量信号。
C、ε(t)是功率信号;D、e t为能量信号;4.将信号f(t)变换为( A)称为对信号f(t)的平移或移位。
A、f(t–t0)B、f(k–k0)C、f(at)D、f (—t)5.将信号f(t)变换为(A)称为对信号f(t)的尺度变换。
A 、f (at )B 、f (t –k 0)C 、f (t –t 0)D 、f (-t )6.下列关于冲激函数性质的表达式不正确的是( B ).A 、)()0()()(t f t t f δδ=B 、()t aat δδ1)(=C 、)(d )(t tεττδ=⎰∞-D 、)()-(t t δδ=7。
下列关于冲激函数性质的表达式不正确的是(D).A 、⎰∞∞-='0d )(t t δ B 、)0(d )()(f t t t f =⎰+∞∞-δC 、)(d )(t t εττδ=⎰∞-D 、⎰∞∞-=')(d )(t t t δδ8。
下列关于冲激函数性质的表达式不正确的是( B ).A 、)()1()()1(t f t t f δδ=+B 、)0(d )()(f t t t f '='⎰∞∞-δC 、)(d )(t t εττδ=⎰∞-D 、)0(d )()(f t t t f =⎰+∞∞-δ9。
(完整版)信号与系统专题练习题及答案

信号与系统专题练习题一、选择题1.设当t<3时,x(t)=0,则使)2()1(t x t x -+-=0的t 值为 C 。
A t>-2或t>-1 B t=1和t=2 C t>-1 D t>-22.设当t<3时,x(t)=0,则使)2()1(t x t x -⋅-=0的t 值为 D 。
A t>2或t>-1 B t=1和t=2 C t>-1 D t>-23.设当t<3时,x(t)=0,则使x(t/3)=0的t 值为 C 。
A t>3 B t=0 C t<9 D t=34.信号)3/4cos(3)(π+=t t x 的周期是 C 。
A π2 B π C 2/π D π/25.下列各表达式中正确的是 B A. )()2(t t δδ= B.)(21)2(t t δδ= C. )(2)2(t t δδ= D. )2(21)(2t t δδ=6. 已知系统的激励e(t)与响应r(t)的关系为:)1()(t e t r -= 则该系统为 B 。
A 线性时不变系统 B 线性时变系统 C 非线性时不变系统 D 非线性时变系统7. 已知 系统的激励e(t)与响应r(t)的关系为:)()(2t e t r = 则该系统为 C 。
A 线性时不变系统B 线性时变系统C 非线性时不变系统D 非线性时变系统 8. ⎰∞-=td ττττδ2sin )( A 。
A 2u(t) B )(4t δ C 4 D 4u(t)10.dt t t )2(2cos 33+⋅⎰-δπ等于 B 。
A 0 B -1 C 2 D -211.线性时不变系统输出中的自由响应的形式由 A 决定A 系统函数极点的位置;B 激励信号的形式;C 系统起始状态;D 以上均不对。
12.若系统的起始状态为0,在x (t)的激励下,所得的响应为 D 。
A 强迫响应;B 稳态响应;C 暂态响应;D 零状态响应。
信号与系统复习试题
1.下列信号的分类方法不正确的是( A ):A 、数字信号和离散信号B 、确定信号和随机信号C 、周期信号和非周期信号D 、因果信号与反因果信号2。
下列说法正确的是( D ): A 、两个周期信号x (t ),y (t )的和x (t )+y(t )一定是周期信号.B 、两个周期信号x (t ),y (t )的周期分别为2和2,则其和信号x (t )+y(t ) 是周期信号。
C 、两个周期信号x (t ),y (t )的周期分别为2和π,其和信号x (t )+y (t )是周期信号。
D 、两个周期信号x (t ),y (t )的周期分别为2和3,其和信号x (t )+y (t )是周期信号。
3。
下列说法不正确的是( D )。
A 、一般周期信号为功率信号.B 、 时限信号(仅在有限时间区间不为零的非周期信号)为能量信号。
C 、ε(t )是功率信号;D 、e t 为能量信号;4。
将信号f (t )变换为( A )称为对信号f (t )的平移或移位。
A 、f (t –t 0) B 、f (k–k 0) C 、f (at ) D 、f (—t )5.将信号f (t )变换为( A )称为对信号f (t )的尺度变换。
A 、f (at ) B 、f (t –k 0) C 、f (t –t 0) D 、f (—t )6。
下列关于冲激函数性质的表达式不正确的是( B )。
A 、)()0()()(t f t t f δδ=B 、()t aat δδ1)(=C 、)(d )(t tεττδ=⎰∞- D 、)()-(t t δδ=7.下列关于冲激函数性质的表达式不正确的是( D )。
A 、⎰∞∞-='0d )(t t δ B 、)0(d )()(f t t t f =⎰+∞∞-δC 、)(d )(t tεττδ=⎰∞- D 、⎰∞∞-=')(d )(t t t δδ8.下列关于冲激函数性质的表达式不正确的是( B ).A 、)()1()()1(t f t t f δδ=+B 、)0(d )()(f t t t f '='⎰∞∞-δC 、)(d )(t tεττδ=⎰∞- D 、)0(d )()(f t t t f =⎰+∞∞-δ9。
信号与系统试题库
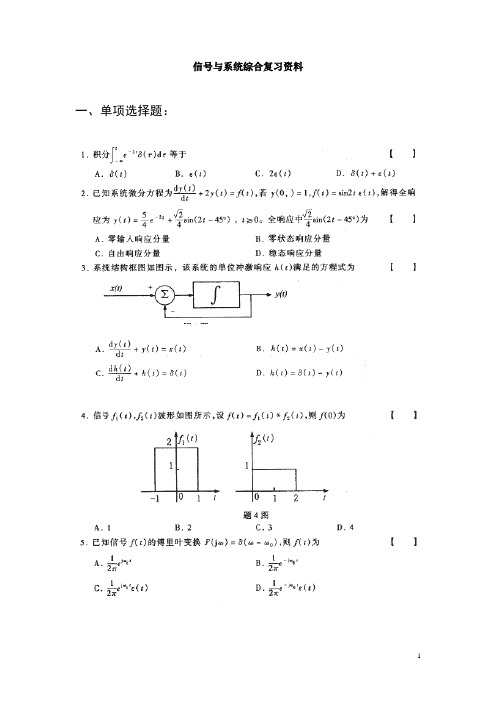
信号与系统综合复习资料一、单项选择题:14、已知连续时间信号,)2(100)2(50sin )(--=t t t f 则信号t t f 410cos ·)(所占有的频带宽度为() A .400rad /s B 。
200 rad /s C 。
100 rad /s D 。
50 rad /sf如下图(a)所示,其反转右移的信号f1(t) 是()15、已知信号)(tf如下图所示,其表达式是()16、已知信号)(1tA、ε(t)+2ε(t-2)-ε(t-3)B、ε(t-1)+ε(t-2)-2ε(t-3)C、ε(t)+ε(t-2)-ε(t-3)D、ε(t-1)+ε(t-2)-ε(t-3)17、如图所示:f(t)为原始信号,f1(t)为变换信号,则f1(t)的表达式是()A、f(-t+1)B、f(t+1)C、f(-2t+1)D、f(-t/2+1)18、若系统的冲激响应为h(t),输入信号为f(t),系统的零状态响应是( )19。
信号)2(4sin 3)2(4cos 2)(++-=t t t f ππ与冲激函数)2(-t δ之积为( )A 、2B 、2)2(-t δC 、3)2(-t δD 、5)2(-t δ,则该系统是()>-系统的系统函数.已知2]Re[,651)(LTI 202s s s s s H +++=A 、因果不稳定系统B 、非因果稳定系统C 、因果稳定系统D 、非因果不稳定系统21、线性时不变系统的冲激响应曲线如图所示,该系统微分方程的特征根是( )A 、常数B 、 实数C 、复数D 、实数+复数22、线性时不变系统零状态响应曲线如图所示,则系统的输入应当是( )A 、阶跃信号B 、正弦信号C 、冲激信号D 、斜升信号23. 积分⎰∞∞-dt t t f )()(δ的结果为( )A )0(fB )(t f C.)()(t t f δ D.)()0(t f δ24. 卷积)()()(t t f t δδ**的结果为( )A.)(t δB.)2(t δC. )(t fD.)2(t f25. 零输入响应是( )A.全部自由响应B.部分自由响应C.部分零状态响应D.全响应与强迫响应之差 2A 、1-eB 、3eC 、3-e D 、1 27.信号〔ε(t)-ε(t -2)〕的拉氏变换的收敛域为 ( )A.Re[s]>0B.Re[s]>2C.全S 平面D.不存在28.已知连续系统二阶微分方程的零输入响应)(t y zi 的形式为t t Be Ae 2--+,则其2个特征根为( )A 。
信号与系统复习题(含答案)
信号与系统复习题(含答案)试题一一.选择题(共10题,20分) 1、n j n j een x )34()32(][ππ+=,该序列是。
A.非周期序列B.周期3=NC.周期8/3=ND. 周期24=N2、一连续时间系统y(t)= x(sint),该系统是。
A.因果时不变B.因果时变C.非因果时不变D.非因果时变 3、一连续时间LTI 系统的单位冲激响应)2()(4-=-t u e t h t ,该系统是。
A.因果稳定B.因果不稳定C.非因果稳定D. 非因果不稳定4、若周期信号x[n]是实信号和奇信号,则其傅立叶级数系数a k 是。
A.实且偶B.实且为奇C.纯虚且偶D. 纯虚且奇 5、一信号x(t)的傅立叶变换??><=2||02||1)(ωωω,,j X ,则x(t)为。
A. t t 22sinB. tt π2sin C. t t 44sin D.t t π4sin6、一周期信号∑∞-∞=-=n n t t x )5()(δ,其傅立叶变换)(ωj X 为。
A. ∑∞-∞=-k k )52(52πωδπ B. ∑∞-∞=-k k )52(25πωδπC. ∑∞-∞=-k k )10(10πωδπD. ∑∞-∞=-k k)10(101πωδπ7、一实信号x[n]的傅立叶变换为)(ωj e X ,则x[n]奇部的傅立叶变换为。
A.)}(Re{ωj e X j B. )}(Re{ωj e XC. )}(Im{ωj e X j D. )}(Im{ωj e X8、一信号x(t)的最高频率为500Hz ,则利用冲激串采样得到的采样信号x(nT)能唯一表示出原信号的最大采样周期为。
A. 500B. 1000C. 0.05D. 0.001 9、一信号x(t)的有理拉普拉斯共有两个极点s=-3和s=-5,若)()(4t x e t g t =,其傅立叶变换)(ωj G 收敛,则x(t)是。
A. 左边B. 右边C. 双边D. 不确定10、一系统函数1}Re{1)(->+=s s e s H s,,该系统是。
信号与系统复习题
信号与系统试题库一、填空题绪论:1.离散系统的激励与响应都是____离散信号 __。
2.请写出“LTI ”的英文全称___线性非时变系统 ____。
3.单位冲激函数是__阶跃函数_____的导数。
4.题3图所示波形可用单位阶跃函数表示为()(1)(2)3(3)t t t t εεεε+-+---。
5.如果一线性时不变系统的输入为f(t),零状态响应为y f (t )=2f (t-t 0),则该系统的单位冲激响应h(t)为____02()t t δ-_________。
6. 线性性质包含两个容:__齐次性和叠加性___。
7. 积分⎰∞∞-ω--δ-δdt )]t t ()t ([e 0t j =___01j t e ω--_______。
8.已知一线性时不变系统,当激励信号为f(t)时,其完全响应为(3sint-2cost )ε(t);当激励信号为2f(t)时,其完全响应为(5sint+cost)ε(t),则当激励信号为3f(t)时,其完全响应为___7sint+4cost _____。
9. 根据线性时不变系统的微分特性,若:f(t)−−→−系统y f (t) 则有:f ′(t)−−→−系统_____ y ′f (t)_______。
10. 信号f(n)=ε(n)·(δ(n)+δ(n-2))可_____δ(n)+δ(n-2)_______信号。
11、图1所示信号的时域表达式()f t =()(1)(1)tu t t u t --- 。
12、图2所示信号的时域表达式()f t =()(5)[(2)(5)]u t t u t u t +----。
13、已知()()()2f t t t t εε=--⎡⎤⎣⎦,则()f t '=()(2)2(2)u t u t t δ----。
14、[]2cos32td ττδτ-∞⎛⎫+ ⎪⎝⎭⎰=8()u t 。
15、[]()1td τδττ-∞'-⎰=()()u t t δ+。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
信号与系统试题库一、选择题 共50题1.下列信号的分类方法不正确的是( A ):A 、数字信号和离散信号B 、确定信号和随机信号C 、周期信号和非周期信号D 、因果信号与反因果信号2.下列说法正确的是( D ):A 、两个周期信号x (t ),y (t )的和x (t )+y(t )一定是周期信号。
B 、两个周期信号x (t ),y (t )的周期分别为2和2,则其和信号x (t )+y(t ) 是周期信号。
C 、两个周期信号x (t ),y (t )的周期分别为2和π,其和信号x (t )+y(t )是周期信号。
D 、两个周期信号x (t ),y (t )的周期分别为2和3,其和信号x (t )+y(t )是周期信号。
3.下列说法不正确的是( D )。
A 、一般周期信号为功率信号。
B 、时限信号(仅在有限时间区间不为零的非周期信号)为能量信号。
C 、ε(t )是功率信号;D 、e t 为能量信号;4.将信号f (t )变换为( A )称为对信号f (t )的平移或移位。
A 、f (t –t 0)B 、f (k–k 0)C 、f (at )D 、f (-t )5.将信号f (t )变换为(A )称为对信号f (t )的尺度变换。
A 、f (at )B 、f (t –k 0)C 、f (t –t 0)D 、f (-t )6.下列关于冲激函数性质的表达式不正确的是( B )。
A 、)()0()()(t f t t f δδ=B 、()t a at δδ1)(=C 、)(d )(t tεττδ=⎰∞-D 、)()-(t t δδ=7.下列关于冲激函数性质的表达式不正确的是(D )。
A 、⎰∞∞-='0d )(t t δ B 、)0(d )()(f t t t f =⎰+∞∞-δ C 、)(d )(t tεττδ=⎰∞- D 、⎰∞∞-=')(d )(t t t δδ8.下列关于冲激函数性质的表达式不正确的是( B )。
A 、)()1()()1(t f t t f δδ=+B 、)0(d )()(f t t t f '='⎰∞∞-δ C 、)(d )(t tεττδ=⎰∞-D 、)0(d )()(f t t t f =⎰+∞∞-δ 9.)1()1()2(2)(22+++=s s s s H ,属于其零点的是( B )。
A 、-1 B 、-2 C 、-j D 、j10. )2)(1()2(2)(-++=s s s s s H ,属于其极点的是(B )。
A 、1 B 、2 C 、0 D 、-211.下列说法不正确的是(D )。
A 、H (s)在左半平面的极点所对应的响应函数为衰减的。
即当t→∞时,响应均趋于0。
B 、 H (s)在虚轴上的一阶极点所对应的响应函数为稳态分量。
C 、 H (s)在虚轴上的高阶极点或右半平面上的极点,其所对应的响应函数都是递增的。
D 、H (s)的零点在左半平面所对应的响应函数为衰减的。
即当t→∞时,响应均趋于0。
12.下列说法不正确的是(D )。
A 、H(z)在单位圆内的极点所对应的响应序列为衰减的。
即当k→∞时,响应均趋于0。
B 、H(z)在单位圆上的一阶极点所对应的响应函数为稳态响应。
C 、H(z)在单位圆上的高阶极点或单位圆外的极点,其所对应的响应序列都是递增的。
即当k→∞时,响应均趋于∞。
D 、H(z)的零点在单位圆内所对应的响应序列为衰减的。
即当k→∞时,响应均趋于0。
13. 序列的收敛域描述错误的是( B ):A 、对于有限长的序列,其双边z 变换在整个平面;B 、对因果序列,其z 变换的收敛域为某个圆外区域;C 、对反因果序列,其z 变换的收敛域为某个圆外区域;D 、对双边序列,其z 变换的收敛域为环状区域。
14. 某系统的系统函数为H(s),若同时存在频响函数H (jω),则该系统必须满足条件( C )A . 时不变系统B .因果系统C .稳定系统D .线性系统15. 对因果系统,只要判断H(s)的极点,即A(s)=0的根(称为系统特征根)在平面上的位置,即可判定系统是否稳定。
下列式中对应的系统可能稳定的是[D]A 、s 3+4s 2-3s+2B 、s 3+4s 2+3sC 、s 3-4s 2-3s-2D 、s 3+4s 2+3s+216.已知f (t),为求f (3-2t), 则下列运算正确的是( C )A. f(-2t)左移3B. f (-2t)右移3C. f (2t)左移3 D . f (2t)右移17..对因果系统,只要判断H(s)的极点,即A(s)=0的根(称为系统特征根)是否都在左半平面上,即可判定系统是否稳定。
下列式中对应的系统可能稳定的是[ B ]A 、s 3+2008s 2-2000s+2007B 、s 3+2008s 2+2007sC 、s 3-2008s 2-2007s-2000D 、s 3+2008s 2+2007s+200018.若f(t) ←→ F(s) , Re[s]>σ0,则f(2t) ←→ [ D ]A 、)2(21s FB 、)2(21s F Re[s]>2σ0 C 、)2(s F D 、)2(21s F Re[s]>σ019、函数f(t) 的图像如图所示,f(t)为[ C ]A.偶函数B.奇函数C.奇谐函数 D .都不是20.系统的幅频特性|H(jω)|和相频特性如图(a)(b)所示,则下列信号通过该系统时,不产生失真的是[ D ](A) f(t) = cos(t) + cos(8t)(B) f(t) =sin(2t) + sin(4t) (C) f(t) = sin(2t)+ sin(4t)(D) f(t) = cos(4t)(a)(b)10-10π5-500ωω|H (j ω)|θ(ω)5-521.序列)1()1(k k k -+δε等于: ( )A.0B.)(k δC.1D.)1(-k δ22.下列有关信号的说法错误的是( )A. 信号是消息的表现形式B. 信号都可以用一个确定的时间函数来描述C. 声音和图像都是信号D. 信号可以分解为周期信号和非周期信号23. 离散时间系统是指输入、输出都是( )的系统A. 模拟信号B. 冲激信号C. 序列D. 矩形信号24. 系统的零状态响应等于激励与( )之间的卷积A. 单位冲激响应B. 单位阶跃响应C. 单位斜坡响应D. 零输入响应25.单边拉普拉斯变换3)()3(+=+-s e s F s 的原函数)(t f 为( ) A. )1()1(3---t e t ε B. )3()3(3---t e t ε C. )1(3--t e t ε D. )3(3--t e t ε26.卷积积分)(*2t e t δ'-等于: ( )A. )(t δ'B.-2)(t δ'C. t e2- D. -2t e 2-27.符号函数的傅里叶变换为( ) A.1 B.2πδ(w) C.2/jw D.πδ(w)+1/jw28.函数)]()62[sin(2t t dt d t δπ-的傅里叶变换等于 A.1 B. jw eC. 1-jwD. 1+jw 29.单边Z 变换12)(+=z z z F 的原序列f(k)等于: ( ) A. )()21(k k ε- B. )()21(1k k ε+ C. )()21(1k k ε+-- D. )()21(k k ε 30.卷积和不具有的性质是( )A. 交换律B. 结合律C.分配律D. 互补律答案:21—30:DBCAC DCACD31.单边拉普拉斯变换()()33s e F s s -+=+的原函数()f t 为( ) A 、 )1()1(3---t e t ε B 、 )3()3(3---t e t ε C 、 )1(3--t e t ε D 、)3(3--t e t ε32.下列有关信号的说法错误的是( )A. 信号是消息的表现形式B. 信号都可以用一个确定的时间函数来描述C. 声音和图像都是信号D. 信号可以分解为周期信号和非周期信号33.离散时间系统是指输入、输出都是( )的系统A. 模拟信号B. 冲激信号C. 序列D. 矩形信号34. ()0sa t dt -∞⎰( )A 、 π/2B 、πC 、1D 、∞35.已知()()()12zF z z z =--,其反变换f (0)=( )A 、0B 、70C 、10D 、136.已知()()f t F j ω↔,则()326j e f t --的傅里叶变换为( )A 、()321322j F j e ωω-+⎡+⎤⎛⎫- ⎪⎢⎥⎝⎭⎣⎦B 、 ()331322j F j e ωω-+⎡+⎤⎛⎫ ⎪⎢⎥⎝⎭⎣⎦C 、 ()321322j F j e ωω--⎡-⎤⎛⎫ ⎪⎢⎥⎝⎭⎣⎦.D 、 ()331322j F j e ωω+⎡+⎤⎛⎫ ⎪⎢⎥⎝⎭⎣⎦37.周期为T 的周期信号()f t ,已知其指数形式的傅里叶系数为n F ,则()()1df t f t dt =的傅里叶系数为( )A 、n FB 、n F -C 、0jn t n F e-Ω D 、n jn F Ω 38.阶跃函数的拉普拉斯变换为( )A 、1B 、1sC 、11s + D 、()1s s πδ+ 39.如果()f k 是因果序列,且单边Z 变换为()F z ,则以下表达式正确的是( )A 、()()11f k z F z --↔ B 、()()1f k zF z -↔ C 、()()()111f k z F z f --↔+- D 、()()()111f k z F z f --↔- 40.如果系统函数()H s 在s 平面的虚轴上有二阶极点,其所对应的响应函数在t 趋近于无穷大时( )A 、趋于无穷大B 、趋于无穷小C 、趋于零D 、在某个范围内稳定 答案:31—40: CDCAA BDBAA41.单边拉普拉斯变换()()33s e F s s -+=+的原函数()f t 为( ) A. 交换律 B. 结合律 C. 分配律 D.互补律42、若()()()y t f t h t =*,则()(2)2f t h t *等于 ( )。
A.)2(41t yB. )2(21t yC.)4(41t yD.)4(21t y43、连续周期信号的频谱具有( )A.连续性、周期性B. 连续性、收敛性C.离散性、周期性D. 离散性、收敛性44、离散因果系统稳定的条件是,系统函数()H z 的极点位于( )A. s 平面的左半开平面B.s 平面的右半开平面C. z 平面的单位圆内D.z 平面的单位圆外45、周期序列2cos(1.5/4)k ππ+的周期N 为( )A. 1B. 2C. 3D. 446、已知10()(1)(2)z F z z z =--其收敛域为2z >,其反变换()f k 的第2项()1f =( )A. 0B. 70C.10D. 147、如果()f k 是因果序列,且单边Z 变换为()F z ,则以下表达式正确的是( )A.()()11f k z F z --↔ B.()()1f k zF z -↔ C.()()()111f k z F z f --↔+- D.()()()111f k z F z f --↔- 48、如果系统函数()H s 在s 平面的虚轴上有二阶极点,其所对应的响应函数在t 趋近于无穷大时( )A.趋于无穷大B.趋于无穷小C.趋于零D.在某个范围内稳定49. 关于系统的稳定性,以下说法中哪一项是错误的。