四叉树碰撞检测
游戏开发中的物体碰撞检测算法探讨
游戏开发中的物体碰撞检测算法探讨在游戏开发中,物体碰撞检测是一个重要的技术。
它可以用于实现物体之间的交互、碰撞反应和游戏规则的验证。
本文将探讨游戏开发中常用的物体碰撞检测算法以及它们的实现原理和使用场景。
一、边界框碰撞检测算法边界框碰撞检测算法是最基本的一种物体碰撞检测算法。
它通过创建一个矩形边界框来表示物体的外形,并检测两个矩形边界框之间的相交情况来判断是否发生碰撞。
这种算法简单高效,适用于大部分游戏场景。
边界框碰撞检测算法的实现主要包括两个步骤:边界框的创建和碰撞检测。
边界框可以根据物体的形状和位置进行计算,常见的边界框形状包括矩形、圆形和椭圆形。
碰撞检测则是通过判断两个边界框是否相交来确定是否发生碰撞。
如果两个边界框的相交面积大于零,则表示发生了碰撞。
在实际游戏开发中,边界框碰撞检测算法可以用于实现物体之间的碰撞反应,例如角色与障碍物的碰撞、子弹与敌人的碰撞等。
通过这种算法,开发人员可以简单快速地实现基本的碰撞效果。
二、分离轴碰撞检测算法分离轴碰撞检测算法是一种更精确的物体碰撞检测算法。
它通过判断两个物体是否有相交轴来确定是否发生碰撞。
相交轴是指垂直于物体边界的轴,如果两个物体在所有相交轴上都没有重叠区域,则表示它们没有发生碰撞。
分离轴碰撞检测算法的实现主要包括两个步骤:轴的计算和碰撞检测。
轴的计算需要获取物体的边界信息,可以使用物体的顶点和边来计算。
碰撞检测则是使用分离轴定理判断两个物体是否有相交轴。
如果两个物体没有任何相交轴,那么它们就没有发生碰撞。
分离轴碰撞检测算法相比边界框碰撞检测算法更精确,可以用于处理复杂的物体形状和旋转。
例如,在一款足球游戏中,可以使用分离轴碰撞检测算法来判断足球是否进入了球门。
通过计算足球和球门的边界信息,然后使用分离轴定理进行碰撞检测,可以实现准确的进球判定。
三、四叉树碰撞检测算法四叉树碰撞检测算法是一种用于优化碰撞检测性能的算法。
在游戏中,物体的数量往往非常庞大,通过对物体进行四叉树的空间划分可以提高碰撞检测的效率。
优化虚拟现实场景渲染和物理性能的技巧和要点

优化虚拟现实场景渲染和物理性能的技巧和要点虚拟现实(VR)是一种创新的交互体验技术,可以通过模拟感官提供沉浸式的虚拟体验。
在虚拟现实应用程序中,场景渲染和物理性能是至关重要的方面,因为它们直接影响用户的体验和流畅性。
本文将介绍优化虚拟现实场景渲染和物理性能的一些关键技巧和要点。
一、合理管理渲染管线优化场景渲染的一个重要方面是合理管理渲染管线。
渲染管线是指将渲染的各个阶段有序执行的过程。
在虚拟现实应用程序中,渲染时间的限制需要尽可能快速地生成图像帧,以确保用户获得流畅和沉浸式的体验。
1.减少渲染特效和复杂度:考虑到虚拟现实设备的资源限制,减少过多的渲染特效和复杂度是必要的。
例如,降低阴影质量、减少粒子系统数量等,可以减轻GPU的负担,提高整体帧率。
2.使用级别-of-detail(LOD):LOD是一种动态地调整模型细节层次的技术。
在场景中使用LOD可以根据物体与视野的距离和重要程度,动态地选择合适的模型细节层次,从而减少渲染负荷,并提高渲染性能。
3.避免过多绘制调用:尽量减少绘制调用次数可以提高渲染性能。
将多个物体合并为一个批次并在单个绘制调用中渲染,可以减少CPU和GPU之间的通信开销。
二、优化物理计算性能在虚拟现实应用程序中,物理计算是实现真实感和交互性的重要部分。
下面是一些优化物理计算性能的技巧和要点。
1.使用适当的物理引擎:选择适合虚拟现实应用程序的物理引擎。
不同的物理引擎在性能和功能上存在差异。
根据应用程序需求和设备限制选择合适的物理引擎,能够提供良好的性能和稳定的模拟。
2.优化碰撞检测:碰撞检测是虚拟现实应用程序中常见的物理计算。
高效的碰撞检测算法可以减少计算开销。
使用空间分区(如包围盒、四叉树等)来加速碰撞检测,只对可能发生碰撞的对象进行检测。
3.考虑近场物理效果:在虚拟现实应用程序中,角色或物体通常会与用户交互,因此近场物理效果是非常重要的。
通过聚焦在相机附近的物理计算,可以减少计算量,提高性能。
碰撞检测中基于OBB层次结构的加速搜索方法
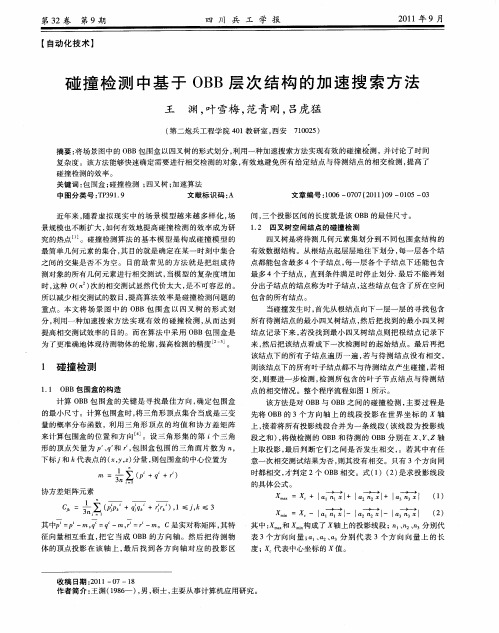
则该结点下 的所 有叶子结点都不与待 测结点产 生碰撞 , 若相 交, 则要进一步检测 , 检测所 包含 的叶 子节点 结点 与待 测结 点 的相 交情 况。整个程序流程如 图 1 所示 。 该方法 是对 O B与 O B之 间的碰撞 检测 , B B 主要过 程是 先将 O B的 3个 方 向轴 上 的线 段投 影 在世 界 坐标 的 轴 B 上, 接着将所有投影线 段合并 为一条 线段 ( 线段 为投 影线 该 段之 和) 将做检 测的 O B和待 测 的 O B分别 在 X、 、 , B B Y Z轴 上取投影 , 最后判 断 它们之 间是 否发 生相交 , 。若 其 中有任 意一次 相交 测试 结果为否 , 则其 没有相交 。只有 3个 方向 同
中 图分 类 号 :P 9 . T 3 19 文献标识码 : A 文 章 编 号 :0 6— 7 7 2 1 )9— 15—0 10 0 0 (0 1 0 0 0 3
近年来 , 随着虚拟 现实 中 的场景模 型越 来越 多样 化 , 场 景规模也不断扩 大 , 如何有效地提高 碰撞检测 的效率成 为研 究 的热点 j 。碰撞检测算 法 的基本 模型 是构 成碰撞 模 型 的 最简单几何元素 的集合 , 目的就是 确定在某 一时刻 中集 合 其 之间的交集是否 不为 空。 目前 最 常见 的方法 就是 把组成 待 测对象 的所有几何元 素进 行相交测试 , 当模 型的复杂度增 加
计算 O B包 围盒 的关 键是 寻找 最佳 方 向, 定包 围盒 B 确 的最小尺寸 。计算包 围盒时 , 将三角 形顶点集 合 当成是 三变 量 的概率分 布函数 ,利用 三角 形顶 点 的均值 和 协方 差矩 阵 来计算包 围盒 的位 置和方 向 J 。设 三角 形集 的第 i 个三 角 形 的顶 点矢量 为 P 、 r, 围盒包 围的三 角面 片数为 n q和 ‘包 ,
方块的分割算法

方块的分割算法
方块的分割算法通常用于计算机图形学和计算机视觉领域,以将一个大的矩形或方块划分为多个小块,以便进行图像处理、渲染或其他计算任务。
这种分割方法可以用于图像纹理映射、光栅化、多线程处理等应用。
下面是一些常见的方块分割算法:
1. 均匀分割:这是最简单的方块分割方法。
您将大方块均匀地分成小方块,每个小方块的大小相等。
这对于图像纹理映射等应用非常有用。
在二维情况下,您可以通过计算大方块的宽度和高度,然后将其分割成一系列小方块来实现。
2. 四叉树分割:这种分割方法将大方块递归地分成四个子方块,直到达到某种终止条件。
这对于空间分区、碰撞检测等应用非常有用。
四叉树分割还可以用于地理信息系统(GIS)等领域。
3. k-d 树分割: k-d 树是一种多维空间分割数据结构。
它通常用于高维数据的分区和检索。
在计算机图形学中,k-d 树可以用于加速光线追踪和碰撞检测。
4. 空间划分算法:这些算法将空间分割为不同的区域,以便进行空间查询和处理。
一种常见的方法是二分空间划分,其中您反复选择一个划分轴,然后在该轴上划分空间,直到满足某种条件。
5. 智能分割:智能分割算法使用启发式方法来确定如何最优地划分方块,以满足特定目标。
这可能包括最小化内存或计算开销、优化图像纹理映射贴图的排列等。
这些是常见的方块分割算法的示例。
具体使用哪种算法取决于您的应用需求和数据特征。
方块分割算法在计算机图形学、计算机游戏、图像处理等领域都有广泛的应用。
碰撞检测算法在游戏开发中的实现方法

碰撞检测算法在游戏开发中的实现方法在游戏开发中,碰撞检测是一个非常重要的环节。
它负责检测游戏中的物体是否发生碰撞以及如何处理这种碰撞。
一种常用的碰撞检测算法是基于物体的边界框(Bounding Box)的碰撞检测算法。
边界框是一个简单的矩形或包围框,它完全包围了物体。
利用边界框,我们可以通过简单的矩形碰撞检测算法来判断两个物体是否相交。
这种算法的优势在于它的简单性和高效性。
下面我将介绍一些常见的碰撞检测算法。
1. AABB碰撞检测算法(Axis-Aligned Bounding Box)AABB碰撞检测算法是一种简单而高效的算法。
它基于矩形的边界框判断两个物体是否相交。
首先,需要获取两个物体的边界框,并判断两个边界框在X轴和Y轴上是否有重叠。
如果两个边界框在X轴上有重叠且在Y轴上也有重叠,那么可以判断这两个物体发生了碰撞。
2. OBB碰撞检测算法(Oriented Bounding Box)OBB碰撞检测算法是一种更为复杂的算法。
与AABB不同的是,OBB算法中的边界框可以是任意旋转的矩形。
OBB算法通过计算两个物体的边界框的碰撞轴来判断它们是否相交。
如果两个物体在每个碰撞轴上都有重叠区域,那么可以判断这两个物体发生了碰撞。
3. 圆形碰撞检测算法(Circle Collision Detection)圆形碰撞检测算法适用于游戏中的圆形物体。
对于两个圆形物体,我们可以通过计算它们的半径之和与它们的距离之差来判断是否发生了碰撞。
如果两个圆形物体的距离小于它们的半径之和,那么可以判断这两个物体发生了碰撞。
除了以上算法,还有一些更为复杂的碰撞检测算法,如分离轴定理(Separating Axis Theorem)和凸包碰撞检测算法(Convex Hull Collison Detection)。
这些算法更适用于处理具有复杂形状的物体的碰撞检测。
在实现碰撞检测算法时,可以利用游戏引擎的物理引擎来简化工作。
碰撞检测 原理

碰撞检测原理
碰撞检测是指在计算机图形学和物理模拟中,判断两个或多个物体是否发生了碰撞的过程。
它在许多应用中都有广泛的应用,例如游戏开发、虚拟现实和机器人技术等。
碰撞检测的原理可以描述为以下步骤:
1. 表示物体:首先,需要将待检测的物体进行合适的表示。
常见的表示方法包括使用几何形状(如点、线、面或体素)或使用包围体(如轴对齐包围盒、球体或凸包)。
这些表示方法有助于描述物体的形状和位置。
2. 碰撞检测算法:选择一个适当的碰撞检测算法,以确定两个或多个物体是否发生碰撞。
常见的算法包括离散碰撞检测和连续碰撞检测。
- 离散碰撞检测:在每个离散时间步长内,检查物体的位置
并判断它们是否相交。
常见的算法包括:分离轴定理(Separating Axis Theorem,SAT)、球-球碰撞检测和球-立方
体碰撞检测等。
- 连续碰撞检测:这种方法更加精确,以较小的时间步长迭
代地模拟物体的移动,并检测它们是否在任何时刻发生了碰撞。
常见的算法包括:迭代求解和时间切片方法。
3. 碰撞响应:如果检测到了碰撞,就需要根据具体的应用需求进行相应的处理。
例如,可以反弹物体、改变其速度方向、计
算碰撞点等。
需要注意的是,碰撞检测是一个计算密集型的任务,特别是在处理大量物体的情况下。
为了提高效率,可以使用空间分割数据结构(如网格、四叉树或八叉树)来加速碰撞检测过程,仅对可能接触到的物体进行检测,而忽略其他远离物体。
此外,还可以利用并行计算和优化算法来加速碰撞检测过程的计算速度。
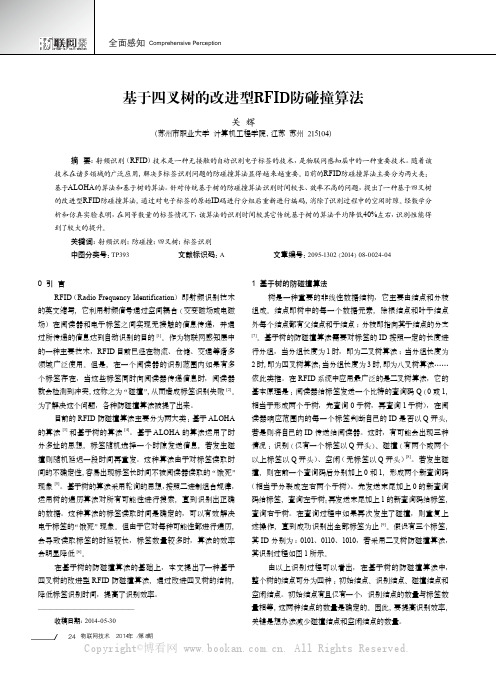
基于四叉树的改进型RFID防碰撞算法
到了较大的提升。
关键词:射频识别;防碰撞;四叉树;标签识别
中图分类号:TP393
文献标识码:A
文章编号:2095-1302(2014)08-0024-04
0引言 RFID(Radio Frequency Identification)即射频识别技术
的英文缩写,它利用射频信号通过空间耦合(交变磁场或电磁
1 基于树的防碰撞算法 树是一种重要的非线性数据结构,它主要由结点和分枝
组成。结点即树中的每一个数据元素,除根结点和叶子结点
场)在阅读器和电子标签之间实现无接触的信息传递,并通 过所传递的信息达到自动识别的目的 [1]。作为物联网感知层中 的一种主要技术,RFID 目前已经在物流、仓储、交通等诸多 领域广泛使用。但是,在一个阅读器的识别范围内如果有多 个标签存在,当这些标签同时向阅读器传递信息时,阅读器 就会检测到冲突,这称之为“碰撞”,从而造成标签识别失败 [2]。 为了解决这个问题,各种防碰撞算法被提了出来。
全面感知 Comprehensive Perception
基于四叉树的改进型RFID防碰撞算法
关辉
(苏州市职业大学 计算机工程学院,江苏 苏州 215104)
摘 要:射频识别(RFID)技术是一种无接触的自动识别电子标签的技术,是物联网感知层中的一种重要技术。随着该
技术在诸多领域的广泛应用,解决多标签识别问题的防碰撞算法显得越来越重要。目前的RFID防碰撞算法主要分为两大类:
目前的 RFID 防碰撞算法主要分为两大类 :基于 ALOHA 的算法 [3] 和基于树的算法 [4]。基于 ALOHA 的算法运用了时 分多址的思想,标签随机选择一个时隙发送信息,若发生碰 撞则随机延迟一段时间再重发。这种算法由于对标签读取时 间的不确定性,容易出现标签长时间不被阅读器读取的“饿死” 现象 [5]。基于树的算法采用轮询的思想,按照二进制组合规律, 运用树的遍历算法对所有可能性进行搜索,直到识别出正确 的数据。这种算法的标签读取时间是确定的,可以有效解决 电子标签的“饿死”现象。但由于它对每种可能性都进行遍历,
碰撞检测问题研究综述

碰撞检测问题研究综述一、本文概述随着计算机图形学、游戏设计、虚拟现实、机器人技术等多个领域的飞速发展,碰撞检测问题已经成为了这些领域中不可或缺的一部分。
碰撞检测是指判断两个或多个物体在空间中是否发生接触或重叠的过程,其精确性和效率直接影响到相关应用的性能和用户体验。
因此,对碰撞检测问题进行深入的研究和探讨,对于推动相关领域的技术进步具有重要的理论价值和实际应用意义。
本文旨在对碰撞检测问题的研究进行综述,全面梳理和总结该领域的研究成果和发展趋势。
文章首先介绍碰撞检测的基本概念、分类和应用场景,然后重点分析现有的碰撞检测算法,包括基于几何形状的算法、基于空间划分的算法、基于物理模型的算法等,并对比它们的优缺点和适用范围。
接着,文章探讨了一些新兴技术,如深度学习等在碰撞检测中的应用,并展望了未来的发展趋势。
文章总结了当前碰撞检测研究中存在的问题和挑战,并提出了一些可能的解决方案和建议。
通过本文的综述,读者可以全面了解碰撞检测问题的研究现状和发展趋势,为相关领域的研究和应用提供有益的参考和借鉴。
本文也希望能够激发更多的研究者和工程师对碰撞检测问题进行深入研究和探索,推动相关技术的进步和发展。
二、碰撞检测的基本方法碰撞检测是计算机图形学、计算机游戏、机器人学、动画和其他多个领域中的一个核心问题。
其核心目标是在动态环境中确定两个或多个对象是否会发生物理上的交互或碰撞。
这一问题涉及到了广泛的算法和技术,从基本的几何方法到复杂的物理模拟。
几何方法是碰撞检测中最基本的一类方法,主要通过比较和计算对象的几何形状和位置来判断是否会发生碰撞。
例如,轴对齐包围盒(Axis-Aligned Bounding Box,AABB)和球包围盒(Bounding Sphere)等方法被广泛用于快速排除不会碰撞的对象。
更精确的方法,如OBB (Oriented Bounding Box)和k-DOP(k-Discrete Orientation Polytope)等,则能提供更为紧密的包围形状,从而提高碰撞检测的准确性。
空间划分的技巧

空间划分的技巧
空间划分是将一个给定的空间划分为若干个不相交的子空间的过程。
在计算机科学和数学领域中,有许多技巧可以用来进行空间划分。
以下是一些常用的空间划分技巧:
1. 四叉树:将空间划分为四个象限的四叉树结构。
每个节点可以代表一个区域,通过递归地划分子区域来组成四叉树。
四叉树经常用于空间索引和碰撞检测等领域。
2. kd树:kd树是一种二叉树结构,用于将多维空间划分为子域。
kd树的每个节点表示一个超矩形区域,通过递归的分割轴选择和划分点来构建。
3. R 树:R 树是一种高效的索引结构,用于多维数据的空间划分和查询。
R 树通过将相邻的数据项组织在一起来形成区域,从而提高查询效率。
4. BSP 树:BSP 树是一种用于空间划分和几何运算的数据结构。
BSP 树通过在空间中插入分割平面,将空间划分为凸区域,并将每个凸区域与几何实体关联起来。
5. Voronoi 图:Voronoi 图是一种将平面划分为多个单元的技术。
每个单元根据周围的数据点得到一个区域,这些区域通过垂直平分线互相分割。
6. 八叉树:八叉树是一种将三维空间划分为八个子区域的树状结构。
八叉树在计算机图形学中经常用于场景建模和可视化等领域。
这些技巧可以根据具体的问题和应用场景选择合适的方法进行空间划分,以提高计算效率和优化算法的执行。
物理仿真中的刚体碰撞算法的使用技巧

物理仿真中的刚体碰撞算法的使用技巧在物理仿真中,刚体碰撞算法是一项重要的技术,它能够模拟物体之间的相互作用和碰撞效果。
准确而高效地使用刚体碰撞算法,是确保物理仿真的真实感和流畅性的关键。
本文将介绍一些物理仿真中刚体碰撞算法的使用技巧,帮助读者更好地应用于实际场景。
首先,了解刚体碰撞算法的基本原理是非常重要的。
刚体碰撞算法通常基于物理定律和力学原理来计算物体之间的相互作用。
其中最常用的算法是离散碰撞检测算法和连续碰撞检测算法。
离散碰撞检测算法适用于处理离散时间步长的仿真,它通过判断物体在两个时间步长内是否发生了碰撞来模拟碰撞效果。
其中最简单的离散碰撞检测算法是包围盒碰撞检测,即将物体用一个包围盒(通常是一个矩形或球体)进行近似表示,然后判断包围盒之间是否存在重叠。
对于复杂形状的物体,可以采用更为精确的算法,如分离轴碰撞检测(SAT)算法和基于边界体的碰撞检测算法。
连续碰撞检测算法则适用于处理连续仿真,即物体在运动过程中可能发生碰撞的情况。
连续碰撞检测算法通常利用物体的运动轨迹来判断是否发生了碰撞。
其中最常用的算法是扫描线算法和球-三角形相交检测算法。
扫描线算法通过将物体的运动轨迹分成离散的时间步长,并检测物体和场景之间是否存在碰撞。
球-三角形相交检测算法则通过判断球体和三角形之间的相互关系,来检测球体是否和场景中的物体发生碰撞。
在实际应用中,我们还需要注意一些使用技巧来提高刚体碰撞算法的效率和稳定性。
首先,合理选择物体的表示形式和精度,可以在一定程度上减少算法的计算量。
例如,对于大规模物体的碰撞检测,可以采用边界体来代替具体的物体形状,从而降低复杂度。
同时,通过使用适当的数据结构,如层次包围盒(BVH)树和四叉树,可以加快碰撞检测的速度,提高算法的效率。
其次,合理设置碰撞检测的时间步长和速度阈值,可以避免算法的不稳定性和误判。
在物理仿真中,时间步长选择越小,仿真的准确性越高,但计算量也相应增大。
因此,需要根据具体需求和硬件限制,来选择合适的时间步长。
二维游戏碰撞检测算法的优化与应用

二维游戏碰撞检测算法的优化与应用【摘要】本文首先对游戏的发展和常用二维游戏碰撞检测算法进行了概括与分析.然后讨论常用二维游戏碰撞检测算法的原理及其优点与缺点,例如:地图格子划分检测(将地图划分为N个小格子进行检测)、矩形检测(利用规则四边形的X、Y坐标进行检测)、圆形检测(利用类圆图形的圆心距离与半径之和的关系进行检测)、像素检测(利用物体碰撞部分像素深度进行检测)、四叉树检测(多个物体的碰撞检测)。
其次,采用在SAT(Separating Axis Theorem)的碰撞检测算法的基础之上,与其它碰撞检测算法进行比较,进而根据SAT的性质定理,将SAT应用在判断凸多边形的旋转碰撞检测。
而基于SAT改进的碰撞检测算法,它比其它算法对于旋转凸多边形的碰撞检测而言更加的快速,并且应用的范围也相对广泛。
然后,在基于VC++6.0开发环境下,采用二维游戏开发技术,对SAT算法在旋转凸多边形的碰撞检测的应用测试的基础之上,进行计算机控制角色与玩家控制角色的碰撞检测。
最后,对文中所涉及到的碰撞检测算法在游戏应用中的优点与缺点,进行分析、比较、总结。
【关键词】地图格子划分检测矩形检测圆形检测像素检测四叉树检测SATTwo-Dimensional Games of Collision Detection AlgorithmOptimization and Application【Abstract】Firstly, the development of the game and used Two-Dimensional Game of Collision Detection Algorithm is summarized and analyzed. And then discuss the commonly used Two-Dimensional Game of Collision Detection Algorithm to the principle and its advantages and disadvantages, for example: Map Detected (the map is divided into N small squares for testing), Rectangle Detection(using the rules of the quadrilateral X, Y coordinates of the test), Circle Detection (using class graph of the center circle radius and the distance and the relationship between the test),Pixel Detection (use of objects and collision detection part of the pixel depth), Quadtree Detection (multiple objects collision detection).Secondly, the use of the SAT (Separating Axis Theorem) the collision detection algorithm based on, and other collision detection algorithms were compared, and then according to theInature of SAT theorem, SAT application in determining the rotation of convex polygon collision detection. Improved SAT-based collision detection algorithm than other algorithms for the rotation in terms of convex polygon collision detection is more rapid, and relatively wide range of applications.Then, based on the VC++6.0 development environment, using two-dimensional game development technology, the SAT algorithm in rotating convex polygon collision detection based on the application of the test, the computer-controlled characters and the player controls the character collision detection.Finally, the paper involved in the collision detection algorithm in the game's pros and cons of the application, analysis, comparison and summary.【Key words】Map Detected Rectangle Detection Circle Detection Pixel Detection Quadtree Detection SAT目录绪论 (1)1 研究概述 (2)1.1 研究背景 (2)1.2 课题来源 (2)1.3 国内外研究现状 (3)1.4 论文主要工作 (3)1.5 论文结构 (3)2 相关算法概念 (4)2.1 地图格子划分检测 (4)2.2 矩形检测 (5)2.3 圆形检测 (7)2.4 像素检测 (8)2.5 四叉树检测 (9)3 基于SAT多边形旋转碰撞检测算法 (12)3.1 什么是SAT (12)3.2 基于SAT的旋转多边形碰撞检测 (14)3.3 算法的改进与优化 (19)4.2 实现步骤 (20)4.1 设计思路流程图 (20)4.2 程序的具体实现 (22)4.2.1 创建游戏窗口 (22)4.2.2 添加背景图片 (24)4.2.3 添加角色图片 (25)4.2.4 按键消息处理 (26)4.2.5 SAT在程序中的应用 (31)5 测试 (31)总结 (33)参考文献 (34)附录 (35)致谢...................................................... 错误!未定义书签。
四叉树碰撞优化版,速度飞一样

四叉树碰撞优化版,速度飞一样原来对四叉树有点恐惧,完全不知道这东西怎么回事,觉得很高级,只好花时间研究了一下,最终效果如下:下面是对四叉树的基本介绍。
懂四叉树的同学可以直接跳过前面看优化部分。
四叉树很简单,就是把一块2d的区域,等分成4份,如下图: 我们把4块区域从右上象限开始编号,逆时针。
[查看图片]接着每份继续等分4份。
[查看图片]一直到我们不需要再继续等分为止。
每次插入对象,对象都在其中一个格子里。
进行碰撞检测的时候,对象只会和他同在一个格子里的以及周围的一些对象进行检测,所以提高了效率。
四叉树的原理大致就是这样,和网格法差不多,简单说就是分格子,检测。
//---------------------------------------------分割线-----------------------------------------------------------//以下部分会对四叉树的实现以及优化进行说明。
下面我们对四叉树进行实现:主要代码复制代码MAX_OBJECTS是每个节点能容纳的最多对象超过则分割4个节点, 我们并不是事先就分好格子,而是在插入对象的时候才进行划分。
MAX_LEVELS是四叉树的最大层数超过则不再划分从根节点开始最多6 层。
level:当前层数objects: 当前节点内的待检测的对象。
bounds 当前节点所表示的2d区域的范围nodes: 4个子节点队列。
构造函数:复制代码分割函数:复制代码如你所见,每次划分节点,都会把父节点的区域对半分。
辅助方法getIndex:复制代码这个方法是返回你所要碰撞检测的矩形在哪块区域(当前节点)。
比如当前区域是Rectange(0, 0, 600, 600) 待检测矩形是Rectangel(0, 0, 30, 30) 那么他就在左上象限index = 1 如果是Rectange(400, 400, 30, 30) 那么他就在右下象限index = 3 请注意,当对象刚好在区域的中心线上的时候,也会返回-1。
机器人路径规划中的碰撞检测算法优化
机器人路径规划中的碰撞检测算法优化在机器人技术的应用中,路径规划是一个关键的问题。
机器人的路径规划需要考虑到碰撞检测,以避免机器人在运动过程中与周围环境发生碰撞。
如何优化碰撞检测算法,提高机器人的路径规划效率和准确性,成为当前研究的热点之一。
碰撞检测是机器人路径规划中的一项重要任务。
其目标是判断机器人在运动过程中是否会与障碍物相撞,并相应地修改路径。
传统的碰撞检测算法采用遍历的方法,逐个比较机器人的运动轨迹和障碍物的边界进行判断,这种方法计算量大、耗时长,且难以处理复杂的碰撞场景。
因此,需要对碰撞检测算法进行优化。
一种常用的碰撞检测算法是包围盒碰撞检测。
该方法将机器人和障碍物都用边界框包围起来,然后比较边界框之间是否有重叠。
该算法简单有效,适用于一些简单的碰撞场景,但对于复杂的碰撞场景效果不佳。
因此,需要改进和优化这种算法。
一种改进的方法是基于几何形状的碰撞检测算法。
该算法将机器人和障碍物都用几何形状表示,通过计算几何形状之间的相交关系来确定是否发生碰撞。
常用的几何形状包括点、线段、圆和多边形等。
该算法能够处理更复杂的碰撞场景,但计算量较大,需要进行优化。
一种优化的方法是采用分级精度碰撞检测算法。
该算法将碰撞检测分为多个层次,先进行粗略的碰撞检测,然后再逐步提高精度进行细化的碰撞检测。
这种算法可以减少计算量,提高碰撞检测的效率。
常用的分级精度碰撞检测算法包括包围球树、包围盒树和四叉树等。
这些数据结构能够将场景划分为不同的区域,有效地减少了碰撞检测的计算量。
另一种优化的方法是采用基于概率的碰撞检测算法。
该算法利用统计学的原理,通过随机采样来估计碰撞的概率。
通过一定数量的采样点,可以较准确地估计出碰撞的概率,并相应地调整机器人的路径。
该算法可以在一定程度上提高碰撞检测的效率和准确性,但需要合理选择采样点的数量和采样方法。
除了算法本身的优化,还可以通过硬件优化来提高碰撞检测的效率。
例如,可以采用多核处理器、图形处理器等加速硬件来进行并行计算,提高碰撞检测的速度。
四叉树法算法设计_模板及概述说明
四叉树法算法设计模板及概述说明1. 引言1.1 概述四叉树法是一种常用的算法设计方法,可以有效地处理和管理具有空间关系的数据。
该算法通过将二维空间划分为多个相等大小的象限,并在每个象限上递归地构建子节点来表示和存储数据。
四叉树法在图像处理、地理信息系统、碰撞检测等领域中得到了广泛应用,并展示了出色的性能和效果。
1.2 文章结构本文将从以下几个方面进行讨论:首先,我们将介绍四叉树法算法设计模板的原理解释,包括其核心思想和基本原则;其次,我们将详细描述用于实现四叉树法算法的数据结构设计,包括节点和整体树形结构;然后,我们将介绍算法步骤,包括构建、查询和插入操作;接着,我们将概述四叉树法的背景和概念以及应用领域及其优势;最后,我们将重点讨论四叉树法算法设计中的要点,如分割策略选择、节点数据存储方式选择以及查询和插入操作优化技巧选择。
1.3 目的本文旨在提供一个全面而详细的介绍四叉树法算法设计的指南,以帮助读者深入理解和掌握该算法,并为其在实际应用中提供参考和借鉴。
通过研究本文,读者将能够了解四叉树法算法的原理、数据结构和关键步骤,并具备选择适当策略和技巧来设计高效的四叉树法算法的能力。
以上为文章“1. 引言”部分的内容。
2. 四叉树法算法设计模板:2.1 原理解释:四叉树法是一种空间数据结构,用于处理二维平面上的数据。
它通过将平面划分为四个相等大小的象限,每个象限都可继续划分,以此类推形成递归结构。
每个节点可以代表一个矩形区域,并存储相关的数据。
该算法主要基于以下思想:如果一个区域内的数据过多或过少,那么将其划分成四个子区域能够更有效地组织和查询数据。
通过不断的划分和合并操作,四叉树可以动态地适应不同密度和大小的数据。
2.2 数据结构设计:在四叉树算法中,通常使用节点来表示每个矩形区域。
每个节点包含以下几个重要属性:- 区域范围:描述节点所代表的矩形区域在整个平面上的位置和大小。
- 节点类型:指示节点是否为叶子节点(即没有子节点)还是内部节点(具有四个子节点)。
计算机区域划分算法
计算机区域划分算法
1. 四叉树算法,四叉树是一种经典的区域划分数据结构,它将
空间递归地划分为四个象限,每个象限可以继续划分为四个子象限,以此类推。
四叉树算法常用于图像压缩、碰撞检测等领域。
2. 分治法,分治法是一种常见的区域划分算法,它将原始空间
划分为若干个子空间,然后在每个子空间上递归地应用相同的算法,最后将结果合并起来。
这种算法常用于解决规模较大的问题,比如
快速傅里叶变换等。
3. K均值算法,K均值算法是一种聚类算法,它将空间中的点
划分为K个簇,使得每个点都属于离它最近的簇。
这种算法常用于
图像分割、数据挖掘等领域。
4. Voronoi图算法,Voronoi图算法将空间划分为若干个区域,每个区域包含了离它最近的一组点,这种算法常用于解决最近邻搜
索等问题。
5. 动态规划算法,动态规划算法可以用于解决一些区域划分的
优化问题,比如最优路径规划、最优区域覆盖等。
以上是一些常见的计算机区域划分算法,它们在不同的领域和应用中发挥着重要作用。
当选择合适的算法时,需要根据具体的问题需求和性能要求来进行综合考虑。
slg 动态四叉树 碰撞检测原理

slg 动态四叉树碰撞检测原理SLG(战略游戏)是一类以军事战争为题材的游戏,而动态四叉树则是SLG游戏中常用的一种碰撞检测算法。
本文将介绍动态四叉树的原理和如何应用于碰撞检测。
碰撞检测是SLG游戏中非常重要的一部分,它用于判断游戏中的单位或物体是否发生了碰撞。
在SLG游戏中,玩家通常需要控制一支军队来进行战斗,而碰撞检测则可以确保单位之间不会互相穿越或重叠,使得游戏更加真实。
动态四叉树是一种常用的碰撞检测算法,它通过将游戏空间划分为一个个小的四叉树节点来加快碰撞检测的速度。
每个四叉树节点都代表着一个矩形区域,并且根据游戏中的单位或物体的位置动态地划分和更新四叉树。
这样一来,当需要进行碰撞检测时,只需要检测单位所在的四叉树节点与相邻节点是否有重叠,而不需要遍历所有单位,大大提高了检测的效率。
动态四叉树的建立过程可以简单描述为以下几个步骤:1. 初始化四叉树:将整个游戏空间划分为一个根节点,该节点代表整个空间,并将其作为四叉树的根节点。
2. 插入单位:当一个单位被添加到游戏中时,需要将其插入到相应的四叉树节点中。
首先从根节点开始,判断单位所在的位置与当前节点的位置关系,如果单位完全包含在当前节点内,则将单位插入到当前节点中;如果单位与当前节点相交,则将单位插入到当前节点的子节点中;如果单位位于当前节点外,则将单位插入到根节点中。
3. 更新四叉树:当单位移动时,需要更新四叉树中的节点位置。
首先判断单位是否仍然位于原来的节点中,如果是,则无需更新;如果不是,则将单位从原来的节点中移除,并按照插入单位的方式将其插入到新的位置。
4. 碰撞检测:当需要进行碰撞检测时,首先确定单位所在的四叉树节点,并检测该节点与相邻节点是否有重叠。
如果有重叠,则需要进一步检测单位与相邻单位是否发生了碰撞;如果没有重叠,则无需进行进一步检测。
动态四叉树在碰撞检测中具有一定的优势。
首先,它可以根据游戏中单位的位置动态地划分和更新四叉树,避免了静态划分带来的空间浪费。
四叉树——精选推荐

四叉树前序四叉树或四元树也被称为Q树(Q-Tree)。
四叉树⼴泛应⽤于图像处理、空间数据索引、2D中的快速碰撞检测、存储稀疏数据等,⽽⼋叉树(Octree)主要应⽤于3D图形处理。
对游戏编程,这会很有⽤。
本⽂着重于对四叉树与⼋叉树的原理与结构的介绍,帮助您在脑海中建⽴四叉树与⼋叉树的基本思想。
本⽂并不对这两种数据结构同时进⾏详解,⽽只对四叉树进⾏详解,因为⼋叉树的建⽴可由四叉树的建⽴推得。
若有不⾜之处,望能不吝指出,以改进之。
^_^ 欢迎Email:zhanxinhang@四叉树与⼋叉树的结构与原理四叉树(Q-Tree)是⼀种树形数据结构。
四叉树的定义是:它的每个节点下⾄多可以有四个⼦节点,通常把⼀部分⼆维空间细分为四个象限或区域并把该区域⾥的相关信息存⼊到四叉树节点中。
这个区域可以是正⽅形、矩形或是任意形状。
以下为四叉树的⼆维空间结构(左)和存储结构(右)⽰意图(注意节点颜⾊与⽹格边框颜⾊):四叉树的每⼀个节点代表⼀个矩形区域(如上图⿊⾊的根节点代表最外围⿊⾊边框的矩形区域),每⼀个矩形区域⼜可划分为四个⼩矩形区域,这四个⼩矩形区域作为四个⼦节点所代表的矩形区域。
较之四叉树,⼋叉树将场景从⼆维空间延伸到了三维空间。
⼋叉树(Octree)的定义是:若不为空树的话,树中任⼀节点的⼦节点恰好只会有⼋个,或零个,也就是⼦节点不会有0与8以外的数⽬。
那么,这要⽤来做什么?想象⼀个⽴⽅体,我们最少可以切成多少个相同等分的⼩⽴⽅体?答案就是8个。
如下⼋叉树的结构⽰意图所⽰:四叉树存储结构的c语⾔描述:/* ⼀个矩形区域的象限划分::UL(1) | UR(0)----------|-----------LL(2) | LR(3)以下对该象限类型的枚举*/typedef enum{UR = 0,UL = 1,LL = 2,LR = 3}QuadrantEnum;/* 矩形结构 */typedef struct quadrect_t{double left,top,right,bottom;}quadrect_t;/* 四叉树节点类型结构 */typedef struct quadnode_t{quadrect_t rect; //节点所代表的矩形区域list_t *lst_object; //节点数据, 节点类型⼀般为链表,可存储多个对象struct quadnode_t *sub[4]; //指向节点的四个孩⼦}quadnode_t;/* 四叉树类型结构 */typedef struct quadtree_t{quadnode_t *root;int depth; // 四叉树的深度}quadtree_t;四叉树的建⽴1、利⽤四叉树分⽹格,如本⽂的第⼀张图<四层完全四叉树结构⽰意图>,根据左图的⽹格图形建⽴如右图所⽰的完全四叉树。
光线追迹的例题
光线追迹的例题以下是一个关于光线追踪的例题:题目描述:考虑一个二维平面,摄像机在(0,0)的位置,初始时平面上没有障碍物。
现在执行QQ次操作,操作有两种:1. 给定x0,y0,x1,y1(x0<x1,y0<y1),创建一个每条边与坐标轴平行的长方形障碍物,包含所有满足x0≤x≤x1且y0≤y≤y1的点(x,y)。
这个障碍物的编号为ii。
2. 给定向量(x,y),会有一个动点从摄像机所在的(0,0)位置出发,以(x,y)所指的方向前进,直到碰到第一个障碍物为止。
对于第2种操作,输出最先碰到的障碍物的编号。
若不会碰到任何障碍物,输出0。
问题分析:根据题目描述,我们需要实现一个光线追踪算法,模拟光线的传播和碰撞过程。
在这个过程中,我们需要注意光线的反射、折射和阴影效果,并使用适当的数据结构和算法来实现它们。
首先,我们需要使用一个合适的数据结构来表示场景中的物体。
由于本题中只有矩形障碍物,我们可以使用一个四叉树来表示场景,每个节点表示一个矩形区域。
在构建四叉树时,我们需要根据障碍物的位置和大小来确定每个节点的范围和子节点的位置。
其次,我们需要实现光线追踪算法的核心部分:光线的发射和碰撞检测。
对于光线的发射,我们需要从摄像机发出光线,并根据光线的方向和长度计算其在场景中的路径。
对于碰撞检测,我们需要遍历四叉树中的每个节点,判断光线是否与障碍物相交。
如果相交,我们还需要确定交点的位置和碰撞方向,以便后续处理光线的反射和折射。
最后,我们需要根据碰撞情况来更新光线的状态,包括光线的反射、折射和阴影效果。
对于反射,我们需要计算反射角和反射光线的方向;对于折射,我们需要计算折射角和折射光线的方向;对于阴影效果,我们需要判断光线是否经过不透光的物体,如果是则产生阴影效果。
最短路径原则
最短路径原则最短路径原则2011-04-08 15:05最短路径原则,就是将复杂的问题简单化。
达到目标并不是只有一条路,眼前的那条往往也不是最短的一条。
所以,解决问题前的第一步,应该是要找实现目标的最短路线。
虽然有些人可能会喜欢完成些复杂的算法来获得成就感,但这就是另一个话题了。
要明白,我们是作为实现工具的工人,而不是授命在空中楼阁中研究的学者。
魔术师视角,而不是观众视角首先是一个比较典型的例子。
那位兄台提出这个问题的时候,问的是碰撞检测。
而且是不规则形状,有凹的也有凸的碰撞检测。
判断两个物体是否边缘匹配,可以拼在一起。
最后还要在放下时自动检测周围的方块,并自动吸附。
必须得说,这个课题真的很困难,倒不是说找不出方法,而是找不出效率可以接受的方法。
优化的办法应该是有的,但是我不会,因为这个还得吸附啊,我哪知道哪边才是边。
但后来我觉得不对劲,就问了下他实际要做的东西。
才知道这家伙原来是做--拼图。
所谓拼图,就是一个图片被拆成各种不规则形状然后打乱,然后让玩家重拼起来,需求就是这样。
好吧,既然是这样,那么记下这些碎片的原始位置,然后判断你手上的碎片目前坐标是否接近这个位置不就好了。
电脑没有必要使用人的思维,设计者没必要使用玩家的思维。
完全模拟,并不是最好的方案。
首先考虑简单的近似实现老外的东西总是能有惊喜。
老外的思路常常都很单纯,过度设计的情况很少见。
不管怎么说,他们的经验还是要丰富一些的。
虽然一个需求怎么都能实现,但细微之处的积累依然会产生大的变化。
这次嘛,是关于一个同事在玩的SNS游戏,它里面捡钱会曲线飞到表示钱的数字上这个效果挺别致的。
国内的情况,连做个直线飞就已经多余了,更不要说曲线了。
但曲线的效果的确比直线生动很多。
然后我就在仔细观察它的轨迹,考虑它是怎么实现的,想做一个类准备着以后来用。
一般的想法,是用二次贝尔法曲线公式计算出运动轨迹,虽然需要一定的数学公式但曾经做过应该不成问题,而且TweenMax也提供了这个功能,但既然是曲线就有曲率的问题,而参考的效果并不是固定的1/4圆,况且这种做法有些太小题大作了。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
if (this.level === 0) result.length = 0;
concatArr(result, this.objects);
if (this.nodes.length) {
};
// 常量
QuadTree.prototype.MAX_OBJECTS = 10;
QuadTree.prototype.MAX_LEVELS = 5;
// 清空子节点
QuadTree.prototype.clear = function() {
// this.nodes[index].insert(objs.splice(i, 1)[0]);
}
}
// 递归刷新子象限
for (i = 0, len = this.nodes.length; i < len; i++) {
cacheArr = [],
concatArr, spliceArr;
concatArr = function(targetArr) {
var arr, i;
for (i = 1; i < arguments.length; i++) {
for (i = arr.length - 1; i >= 0; i--) {
index = this.getIndex(arr[i]);
this.nodes[index].retrieve(rect);
new QuadTree(new Rect(bounds.cX, y, sWidth, sHeight), level + 1),
new QuadTree(new Rect(x, y, sWidth, sHeight), level + 1),
new QuadTree(new Rect(x, bounds.cY, sWidth, sHeight), level + 1),
return 0;
} else if (onLeft) {
return 1;
}
} else if (onBottom) {
if (onLeft) {
return 2;
} else if (onRight) {
return 3;
}
}
return -1;
};
// 插入
QuadTree.prototype.insert = function(rect) {
if (index === -1) {
if (this !== root) {
rect = objs[i];
spliceArr(objs, i, 1);
root.insert(rect);
} else if (this.nodes.length) {
rect = objs[i];
spliceArr(objs, i, 1);
this.nodes[index].insert(rect);
this.objects = [];
this.nodes = [];
this.level = typeof level === 'undefined' ? 0 : level;
this.bounds = bounds;
},
Edit in JSFiddle
Result
JavaScript
(function(global) {
var QuadTree = function QuadTree(bounds, level) {
if (!(this instanceof QuadTree)) return;
Math.abs(rect.cY - bounds.cY) + rect.sHeight > bounds.sHeight)) {
return -1;
}
if (onTop) {
if (onRight) {
x = bounds.x,
y = bounds.y,
sWidth = bounds.sWidth,
sHeight = bounds.sHeight;
this.nodes.push(
new QuadTree(new Rect(bounds.cX, bounds.cY, sWidth, sHeight), level + 1)
);
};
// 获取象限号
QuadTree.prototype.getIndex = function(rect, checkIsInner) {
this.nodes[index].insert(rect);
return;
}
}
objs.push(rect);
if (!this.nodes.length &&
}
}
}
};
// 动态刷新
QuadTree.prototype.refresh = function(root) {
var objs = this.objects,
rect, index, i, len;
index = this.getIndex(objs[i]);
if (index !== -1) {
this.nodes[index].insert(objs.splice(i, 1)[0]);
var i, len;
for (i = index + num, len = arr.length; i < len; i++) {
arr[i - num] = arr[i];
}
arr.length = len - num;
root = root || this;
for (i = objs.length - 1; i >= 0; i--) {
index = this.getIndex(objs[i], true);
// 如果矩形不属于该象限,则将该矩形重新插入
onRight = rect.x >= bounds.cX;
// 检测矩形是否溢出象限界限
if (checkIsInner &&
(Math.abs(rect.cX - bounds.cX) + rect.sWidth > bounds.sWidth ||
var objs = this.objects,
i, index;
if (this.nodes.length) {
index = this.getIndex(rect);
if (index !== -1) {
subnode.clear();
}
};
// 分裂
QuadTree.prototype.split = function() {
var level = this.level,
bounds = this.bounds,
var nodes = this.nodes,
subnode;
this.objects.splice(0, this.objects.length);
while (nodes.length) {
subnode = nodes.shift();
this.nodes[i].refresh(root);
}
};
// 检索
QuadTree.prototype.retrieve = function(rect) {
var result = cacheArr,
arr = arguments[i];
Array.prototype.push.apply(targetArr, arr);
}
};
spliceArr = function(arr, index, num) {
this.objects.length > this.MAX_OBJECTS &&
this.level < this.MAX_LEVELS) {
this.split();
for (i = objs.length - 1; i >= 0; i--) {
var bounds = this.bounds,
onTop = rect.y + rect.h <= bounds.cY,
onBottom = rect.y >= bounds.cY,
onLeft = rect.x + rect.w <= bounds.cX,
index = this.getIndex(rect);
if (index !== -1) {
this.nodes[index].retrieve(rect);
} else {
arr = rect.carve(this.bounds.cX, this.bounds.cY);
// root.insert(objs.splice(i, 1)[0]);
}
பைடு நூலகம் // 如果矩形属于该象限 且 该象限具有子象限,则
// 将该矩形安插到子象限中