元胞自动机-沙堆模型代码
元胞自动机模型程序
%function NaSch02()N=2000;vmax=5;timestep=500;ss=1;averagev=zeros();flow=zeros();avcardis=zeros();%000平均车间距avrv=zeros();%000平均相对速度avFF=zeros();%平均车辆作用力for rho=0.05:0.05:1%车辆密度cells=rand(1,N)<rho;carposition=find(cells);%车辆位置初始化carn=length(carposition);carv=round(vmax*rand(1,carn));%速度初始化cardis=zeros(1,carn);rv=zeros(1,carn);%记录车辆先对速度DMIN=4;D=40;FMAX=100;%F=zeros(1,carn);M=2;%..........................................%车间距、相对速度、作用力初始化for mm=1:carn-1cardis(mm)=carposition(mm+1)-carposition(mm)-1;rv(mm)=carv(mm+1)-carv(mm);%rrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrr if DMIN<cardis(mm)<DF(mm)=M*rv(mm)^2/cardis(mm);%..........................elseif cardis(mm)>Drv(mm)=0;F(mm)=0;elserv(mm)=0;F(mm)=FMAX;endend%..........................endmm=mm+1;cardis(mm)=N+carposition(1)-carposition(mm)-1;rv(mm)=carv(1)-carv(mm);%rrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrr rrrrrrrif DMIN<cardis(mm)<DF(mm)=M*rv(mm)^2/cardis(mm);%..........................elseif cardis(mm)>Drv(mm)=0;F(mm)=0;elserv(mm)=0;F(mm)=FMAX;endend%................................%车间距、相对速度、作用力初始化完成memor_cells=zeros(timestep,N);memor_cellv=zeros(timestep,N);memor_F=zeros(timestep,N);%............................memor_cardis=zeros(timestep,N);%000memor_rv=zeros(timestep,N);%000sumv=0;pmin=0.1;pmax=0.3; flag=0;%sumcardis=0;%00000000sumrv=0;%000for jj=1:timestep%开始更新for ii=1:carnif rv(ii)>=0flag=1;elseflag=0;endcarv(ii)=min(carv(ii)+1,vmax);%加速更新carv(ii)=min(carv(ii),cardis(ii));%减速if flag==1;pslow=pmin;elsepslow=pmax;endif rand(1)<pslowcarv(ii)=max(carv(ii)-1,0);%随机慢化endif (jj>100)sumv=sumv+carv(ii);%vvvvvvvvvvvvvvvvvvvvvvvvvvvv速度求和end%carpositon变化newposition=carposition(ii)+carv(ii);if newposition<=Ncarposition(ii)=newposition;elsecarposition(ii)=newposition-N;endmemor_cells(jj,carposition(ii))=1;end%速度位置更新完,进行车间距、相对速度的更新for mm=1:carn-1if carposition(mm)<carposition(mm+1)cardis(mm)=carposition(mm+1)-carposition(mm)-1;if cardis(mm)<vmax%rv(mm)=carv(mm+1)-carv(mm);%rrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrrr rrrrrrrrrrrrrelse%rv(mm)=0;end%if cardis(mm)>D||cardis(mm)<DMINrv(mm)=0;end%F(mm)=M*rv(mm)^2/cardis(mm);%。
元胞自动机模拟害虫防治python代码

元胞自动机模拟害虫防治python代码元胞自动机(Cellular Automaton)是一种离散模型,由一组按照某种规则进行演化的格子组成。
我们可以使用元胞自动机来模拟害虫的防治过程。
下面是一个简单的Python代码示例,用于模拟害虫的扩散和防治过程。
注意:这个代码只是一个基础的示例,并未考虑许多真实世界中的复杂因素,例如环境变量、害虫种类、防治策略等。
pythonimport numpy as npimport matplotlib.pyplot as plt# 初始化元胞自动机def initialize_grid(size):grid = np.zeros((size, size))# 假设害虫在初始状态位于中心grid[size//2, size//2] = 1return grid# 更新元胞自动机状态def update_grid(grid, size, threshold, kill_prob):new_grid = grid.copy()for i in range(1, size-1):for j in range(1, size-1):# 计算邻居中的害虫数量neighbors = np.sum(grid[(i-1:i+2, j-1:j+2)]) - grid[i, j] if neighbors > threshold:# 如果邻居中的害虫数量超过阈值,当前格子可能会变为害虫new_grid[i, j] = 1 if np.random.rand() < 0.5 else 0elif neighbors == 0:# 如果邻居中没有害虫,当前格子可能会被防治new_grid[i, j] = 0 if np.random.rand() > kill_prob else 1 return new_grid# 绘制元胞自动机状态def plot_grid(grid, title):plt.imshow(grid, cmap='Greys', interpolation='nearest')plt.title(title)plt.show()# 主程序size = 100 # 元胞自动机大小threshold = 5 # 害虫繁殖阈值kill_prob = 0.8 # 防治成功率grid = initialize_grid(size)for i in range(100): # 模拟100个时间步plot_grid(grid, f'Step {i}')grid = update_grid(grid, size, threshold, kill_prob)在这个代码中,我们首先初始化了一个大小为size的元胞自动机,并在中心位置放入一个害虫。
元胞自动机

除了格子气元胞自动机在流体力学上的成功应用。元胞自动机还应用于磁场、电场等场的模拟,以及热扩散、 热传导和机械波的模拟。另外。元胞自动机还用来模拟雪花等枝晶的形成。
元胞自动机可用来通过模拟原子、分子等各种微观粒子在化学反应中的相互作用,而研究化学反应的过程。 例如李才伟 (1997)应用元胞自动机模型成功模拟了由耗散结构创始人I·Prgogine所领导的Brussel学派提出 的自催化模型---Brusselator模型,又称为三分子模型。Y·BarYam等人利用元胞自动机模型构造了高分子的聚 合过程模拟模型,在环境科学上,有人应用元胞自动机来模拟海上石油泄露后的油污扩散、工厂周围废水、废气 的扩散等过程的模拟。
元胞自动机
格动力学模型
01 基本介绍
03 具体解释 05 应用
目录
02 通俗解释 04 分别描述
元胞自动机(cellular automata,CA)是一种时间、空间、状态都离散,空间相互作用和时间因果关系为局 部的格动力学模型,具有模拟复杂系统时空演化过程的能力。
基本介绍
不同于一般的动力学模型,元胞自动机不是由严格定义的物理方程或函数确定,而是用一系列模型构造的规 则构成。凡是满足这些规则的模型都可以算作是元胞自动机模型。因此,元胞自动机是一类模型的总称,或者说 是一个方法框架。其特点是时间、空间、状态都离散,每个变量只取有限多个状态,且其状态改变的规则在时间 和空间上都是局部的。
元胞自动机用于兔子-草,鲨鱼-小鱼等生态动态变化过程的模拟,展示出令人满意的动态效果;元胞自动机 还成功地应用于蚂蚁、大雁、鱼类洄游等动物的群体行为的模拟;另外,基于元胞自动机模型的生物群落的扩散 模拟也是当前的一个应用热点。在信息学中。元胞自动机用于研究信息的保存、传递、扩散的过程。另外。 Deutsch(1972)、Sternberg(1980)和Rosenfeld(1979)等人还将二维元胞自动机应用到图像处理和模式识别 中 (WoIfram.S.,1983)。
元胞自动机沙堆matlab代码

一、介绍元胞自动机及其在沙堆模拟中的应用元胞自动机(Cellular Automaton)是一种由一些简单的规则控制的离散计算模型。
它由一个二维或三维的规则阵列、一组在这个阵列上移动的“元胞”以及一组确定元胞状态变化的规则组成。
元胞自动机最早由数学家约翰·冯·诺伊曼提出,后来由斯蒂芬·沃尔夫勒姆等人进行了大量的研究和应用。
在沙堆模拟中,元胞自动机可以用来模拟沙堆的堆积和坍塌过程。
沙堆模型是一个简单而又重要的研究对象,在物理学和复杂系统中有着广泛的应用。
通过元胞自动机模拟沙堆的行为,可以观察到沙堆中颗粒的运动规律、堆积形态和临界状态等重要现象。
二、沙堆模型的基本原理沙堆模型的基本原理是将一定数量的颗粒投放到一个局部平坦的表面上,通过不断的增加颗粒数目,观察颗粒的堆积和坍塌过程。
在这个过程中,一些稳定的结构和现象会逐渐显现出来。
通过模拟沙堆的行为,可以研究出现这些结构和现象的规律,并且揭示出复杂系统中的一些普遍规律。
三、元胞自动机沙堆模拟的基本原理元胞自动机沙堆模拟的基本原理是将沙堆表面分割成一个个的格子,每个格子就是一个元胞。
在元胞自动机模拟中,每个元胞有一个状态变量表示其高度,而且每个元胞的状态都受到相邻元胞状态的影响。
通过设定适当的规则,可以模拟出沙堆颗粒的堆积和坍塌过程。
四、元胞自动机沙堆模拟的matlab代码```matlab创建一个10x10的元胞数组cells = zeros(10,10);设置沙堆初始高度为5cells(5,5) = 5;模拟沙堆的坍塌过程for i = 1:100遍历每个元胞for x = 1:10for y = 1:10如果当前元胞高度大于3,则进行坍塌if cells(x,y) > 3当前元胞高度减4cells(x,y) = cells(x,y) - 4;上方元胞高度加1if x > 1cells(x-1,y) = cells(x-1,y) + 1;end下方元胞高度加1if x < 10cells(x+1,y) = cells(x+1,y) + 1;end左方元胞高度加1if y > 1cells(x,y-1) = cells(x,y-1) + 1;end右方元胞高度加1if y < 10cells(x,y+1) = cells(x,y+1) + 1;endendendendend输出模拟结果cells```以上是一个简单的用matlab实现的元胞自动机沙堆模拟代码。
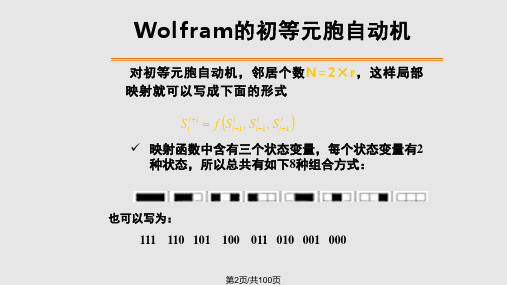
的元胞自动机
第23页/共100页
Rule 184演化结果
t=100,p=0.3,周期性边界条件
第24页/共100页
第二章 经典的元胞自动机
2.2 J. Conway和他的生命游戏 (game of life)
第25页/共100页
Game of Life
生命游戏(game of life)是由剑桥大学的数学家John Horton Conway在1970年提出来的。 生命游戏(game of life)的构成: 1) 元胞分布在规则划分的二维网格上 ; 2) 元胞具有0,1两种状态,0代表“死”,1代表“生” ; 3) 元胞以相邻的8个元胞为邻居。即Moore邻居形式 ; 4) 一个元胞的生死由其在该时刻本身的生死状态和周围八个邻
Sit
0, then
Sit 1
1, 0,
if if
S
t N
3
S
t N
3
SNt表示t时刻,中心元胞i的邻居的状态。
第28页/共100页
Game of Life
生命游戏中的一些演化过程和形态:
第29页/共100页
Game of Life
生命游戏中的一些演化过程和形态:
第30页/共100页
Game of Life
Langton蚂蚁:
从任意一点往一个方向(上、下、左、右选其一)出发,蚂蚁进行 游走,它的规则有两条:
1、如果走到的格子为空,则占领这个格子并且蚂蚁顺时针旋转90度;
2、如果走到的格子已经被占领,则把这个格子的状态变为空,并且逆 时针旋转90度。
第45页/共100页
2.3 Langton和他的元胞自动 机”
t 111
元胞自动机模型

元胞行为
局部变化引起全局变化
*可以简单认为元胞自动机在运动上 类似于波.
*无胞的状态变化依赖于自身状态和 邻居的状态
元胞自动机的规则
某元胞下时刻的状态只决定于邻居的状 态以及自身的初始状态.
元胞行为
元胞网格
元胞行为
元胞邻居
经典元胞
生命游戏
生命游戏 (Came of Life)是J. H. Conway 在2世纪6年代末设计的一种单人玩的计算机 游戏(Garclner,M.,97、97)。他与现代的 围棋游戏在某些特征上略有相似:围棋中有 黑白两种棋子。生命游戏中的元胞有{"生"," 死"}两个状态 {,};围棋的棋盘是规则划分的 网格,黑白两子在空间的分布决定双方的死 活,而生命游戏也是规则划分的网格(元胞似 国际象棋分布在网格内。而不象围棋的棋子 分布在格网交叉点上)。根据元胞的局部空间 构形来决定生死。只不过规则更为简单。
程序实现
典型元胞程序精讲
交通流
谢谢!
生命游戏的构成及规则: *元胞分布在规则划分的网格上; *元胞具有,两种状态,代表“死”,l代表“生”; *元胞以相邻的8个元胞为邻居。即Moore邻居形式; *一个元胞的生死由其在该时刻本身的生死状态和周 围八个邻居的状态 (确切讲是状态的和)决定: 在当前时刻,如果一个元胞状态为“生”,且八 个相邻元胞中有两个或三个的状态为“生”,则在下-时刻该元胞继续保持为“生”,否则“死”去; 在当前时刻。如果一个元胞状态为"死"。且八个 相邻元胞中正好有三个为"生"。则该元胞在下一时刻 " 复活"。否则保持为"死"。
自动驾驶专用车道matlab元胞自动机代码
自动驾驶技术是近年来备受关注的领域,其应用不仅可以提高交通效率,还可以提高行车安全性。
而在自动驾驶技术中,matlab元胞自动机代码是一种常用的建模和仿真工具,可以帮助工程师们设计和测试自动驾驶系统。
下面将介绍如何使用matlab元胞自动机代码来实现自动驾驶专用车道的模拟。
文章内容将按照以下主题展开:一、自动驾驶专用车道的概念及意义1.1 自动驾驶专用车道的定义1.2 自动驾驶专用车道的意义和作用二、matlab元胞自动机代码的基本原理2.1 元胞自动机的定义和特点2.2 matlab中的元胞自动机代码实现三、自动驾驶专用车道的matlab元胞自动机代码设计3.1 自动驾驶车辆的行为建模3.2 车道交通流模拟3.3 交通规则和控制策略四、matlab元胞自动机代码实现实例4.1 代码框架和基本结构4.2 参数设置和模型验证4.3 模拟结果分析五、自动驾驶专用车道的未来发展方向5.1 自动驾驶技术的趋势5.2 自动驾驶专用车道的未来发展方向通过以上几个主题的介绍,读者可以全面了解自动驾驶专用车道的概念、matlab元胞自动机代码的基本原理和代码实现方法,以及自动驾驶技术的未来发展方向。
希望本文的内容对读者对自动驾驶技术有所帮助,也能引发更多对于自动驾驶专用车道以及matlab元胞自动机代码的讨论和研究。
六、自动驾驶专用车道的概念及意义1.1 自动驾驶专用车道的定义自动驾驶专用车道是为自动驾驶车辆专门设置的通行道路,旨在为自动驾驶车辆提供更加高效、安全的行驶环境。
这些道路通常采用先进的交通管理系统和智能交通设施,以便自动驾驶车辆能够更好地感知和适应道路环境。
自动驾驶专用车道旨在降低交通拥堵、提高交通运输效率,并且可以为用户带来更舒适的出行体验。
1.2 自动驾驶专用车道的意义和作用自动驾驶专用车道的建设与发展对于推动自动驾驶技术的应用具有重要意义。
自动驾驶专用车道可以有效地促进自动驾驶车辆在道路上行驶的安全性与稳定性。
元胞自动机NaSch模型及其MATLAB代码
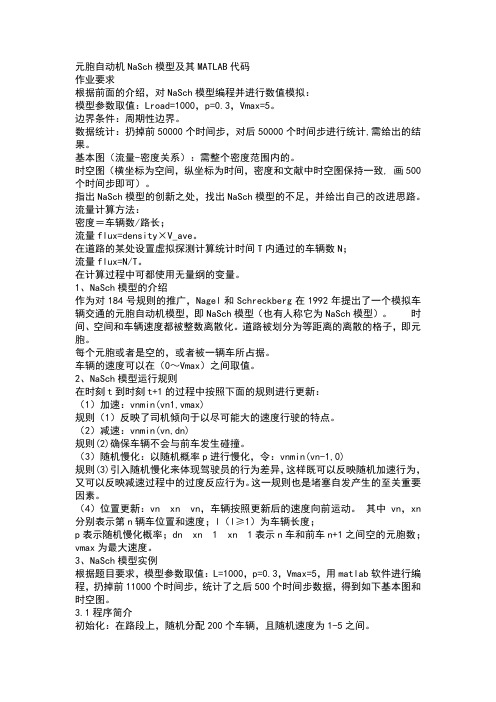
元胞自动机NaSch模型及其MATLAB代码作业要求根据前面的介绍,对NaSch模型编程并进行数值模拟:模型参数取值:Lroad=1000,p=0.3,Vmax=5。
边界条件:周期性边界。
数据统计:扔掉前50000个时间步,对后50000个时间步进行统计,需给出的结果。
基本图(流量-密度关系):需整个密度范围内的。
时空图(横坐标为空间,纵坐标为时间,密度和文献中时空图保持一致, 画500个时间步即可)。
指出NaSch模型的创新之处,找出NaSch模型的不足,并给出自己的改进思路。
流量计算方法:密度=车辆数/路长;流量flux=density×V_ave。
在道路的某处设置虚拟探测计算统计时间T内通过的车辆数N;流量flux=N/T。
在计算过程中可都使用无量纲的变量。
1、NaSch模型的介绍作为对184号规则的推广,Nagel和Schreckberg在1992年提出了一个模拟车辆交通的元胞自动机模型,即NaSch模型(也有人称它为NaSch模型)。
时间、空间和车辆速度都被整数离散化。
道路被划分为等距离的离散的格子,即元胞。
每个元胞或者是空的,或者被一辆车所占据。
车辆的速度可以在(0~Vmax)之间取值。
2、NaSch模型运行规则在时刻t到时刻t+1的过程中按照下面的规则进行更新:(1)加速:vnmin(vn1,vmax)规则(1)反映了司机倾向于以尽可能大的速度行驶的特点。
(2)减速:vnmin(vn,dn)规则(2)确保车辆不会与前车发生碰撞。
(3)随机慢化:以随机概率p进行慢化,令:vnmin(vn-1,0)规则(3)引入随机慢化来体现驾驶员的行为差异,这样既可以反映随机加速行为,又可以反映减速过程中的过度反应行为。
这一规则也是堵塞自发产生的至关重要因素。
(4)位置更新:,车辆按照更新后的速度向前运动。
其中vn,xn 分别表示第n辆车位置和速度;l(l≥1)为车辆长度;p表示随机慢化概率;表示n车和前车n+1之间空的元胞数;vmax为最大速度。
元胞自动机模型

元胞行为
局部变化引起全局变化
*可以简单认为元胞自动机在运动上 类似于波.
*无胞的状态变化依赖于自身状态和 邻居的状态
元胞自动机的规则 某元胞下时刻的状态只决定于邻居的状 态以及自身的初始状态.
元胞行为
元胞网格
元胞行为
元胞邻居
经典元胞
生命游戏
生命游戏 (Came of Life)是J. H. Conway 在2世纪6年代末设计的一种单人玩的计算 机游戏(Garclner,M.,97、97)。他与现 代的围棋游戏在某些特征上略有相似:围 棋中有黑白两种棋子。生命游戏中的元胞 有{"生","死"}两个状态 {,};围棋的棋盘是 规则划分的网格,黑白两子在空间的分布 决定双方的死活,而生命游戏也是规则划 分的网格(元胞似国际象棋分布在网格内。 而不象围棋的棋子分布在格网交叉点上)。 根据元胞的局部空间构形来决定生死。只 不过规则更为简单。
规则:
根据元胞当前状态及其邻居状况确
定下一时刻该元胞状态的动力学函 数,简单讲,就是一个状态转移函 t 数。 f : S it 1 f S it , S N
根据上面对元胞自动机的组成分析,我 们可以更加深入地理解元胞自动机的概 念。 可以将元胞自动机概括为一个用数 学符号来表示的四元组。 A Ld , S , N , f A:代表一个元胞自动机系统;Ld:代表 元胞空间;d:为空间维数;S:是元胞 有限的离散的状态集合;N:表示邻域 内所有元胞的组合(包括中心元胞在 内);f:是局部转换函数,也就是规则。
什么是元胞(CA)自动机
元胞自动机(Cellular Automata,简称CA) 实质上是定义在一个由具有离散、有限状态 的元胞组成的元胞空间上,并按照一定的局 部规则,在离散的时间维度上演化的动力学 系统。
matlab 元胞自动机仿真编码

matlab 元胞自动机仿真编码Matlab是一种高级的计算机编程语言,也是一种数学软件。
在这个工具中,我们可以使用众多的函数和算法,对各种数学问题进行编程和模拟。
其中,元胞自动机仿真是一个非常有趣的应用,它可以模拟种种自然现象,如生态系统、洪水模拟、演化模拟等等。
本文将带领大家了解如何使用Matlab实现元胞自动机仿真。
第一步:安装Matlab在进行任何操作之前,我们需要先安装Matlab软件。
Matlab有专门的官网可以下载,或者可以到计算机的应用商店中寻找该软件。
安装完成后,我们就可以在计算机中打开Matlab。
第二步:了解元胞自动机元胞自动机是指在一个方格化空间中,每个单元格内存有一定的状态,根据一定的规则进行相互作用和转化。
元胞自动机仿真可以通过对这些规则和状态的变化进行模拟,来预测和控制自然现象的演化。
第三步:编写Matlab程序在Matlab中,我们可以使用现成的元胞自动机仿真函数进行模拟,也可以自己编写程序来实现。
下面是一个简单的Matlab元胞自动机程序,其中包括三部分:初始化、更新状态和可视化。
%% InitializationN = 100; % Number of cells in each rowdensity = 0.3; % Initial density of live cellscells = rand(N,N) < density;imagesc(cells); % Visualize initial configurationcolormap(gray); % Set color map to gray%% Update the state of the systemS = [N N]; % Size of the latticeB = ones(3,3); % 3-by-3 neighborhoodB(2,2) = 0; % Exclude the center cellfor t = 1:100 % Number of iterationsC = conv2(cells,B,'same'); % Convolve with neighborhood cells = (C == 3) | (cells & (C == 2)); % Update cellsimagesc(cells); % Visualize new configurationdrawnow; % Update displayend%% Visualizationimagesc(cells); % Visualize final configuration colormap(gray); % Set color map to gray在该程序中,我们首先定义了一些变量,如N表示每行单元格的数量,density表示初始的存活细胞密度。
(完整版)元胞自动机-沙堆模型代码
function []=testCA(n)z = zeros(n,n);cells = z;cells(n/2,.25*n:.75*n) = 1;cells(.25*n:.75*n,n/2) = 1;imh = image(cat(3,cells,z,z));set(imh, 'erasemode', 'none')axis equalaxis tight%Ö÷º¯Êý²ÎÊýnx=52; %must be divisible by 4ny=100;Pbridge = .05;z=zeros(nx,ny);o=ones(nx,ny);sand = z;sandNew = z;gnd = z ;gnd(1:nx,ny-3)=1 ;% the ground linegnd(nx/4:nx/2+4,ny-15)=1; %the hole linegnd(nx/2+6:nx,ny-15)=1; %the hole linegnd(nx/4, ny-15:ny) = 1; %side linegnd(3*nx/4, 1:ny) = 1 ;%Ö÷º¯Êýfor i=1:1000p=mod(i,2); %margolis neighborhoodsand(nx/2,ny/2) = 1; %add a grain at the top%upper left cell updatexind = [1+p:2:nx-2+p];yind = [1+p:2:ny-2+p];%randomize the flow -- 10% of the timevary = rand(nx,ny)< .9 ;vary1 = 1-vary;sandNew(xind,yind) = ...gnd(xind,yind).*sand(xind,yind) + ...(1-gnd(xind,yind)).*sand(xind,yind).*sand(xind,yind+1) .* ...(sand(xind+1,yind+1)+(1-sand(xind+1,yind+1)).*sand(xind+1,yind)); sandNew(xind+1,yind) = ...gnd(xind+1,yind).*sand(xind+1,yind) + ...(1-gnd(xind+1,yind)).*sand(xind+1,yind).*sand(xind+1,yind+1) .* ...(sand(xind,yind+1)+(1-sand(xind,yind+1)).*sand(xind,yind)); sandNew(xind,yind+1) = ...sand(xind,yind+1) + ...(1-sand(xind,yind+1)) .* ...( sand(xind,yind).*(1-gnd(xind,yind)) + ...(1-sand(xind,yind)).*sand(xind+1,yind).*(1-gnd(xind+1,yind)).*sand(xind+1,yind+1));sandNew(xind+1,yind+1) = ...sand(xind+1,yind+1) + ...(1-sand(xind+1,yind+1)) .* ...( sand(xind+1,yind).*(1-gnd(xind+1,yind)) + ...(1-sand(xind+1,yind)).*sand(xind,yind).*(1-gnd(xind,yind)).*sand(xind,y ind+1));%scramble the sites to make it look bettertemp1 = sandNew(xind,yind+1).*vary(xind,yind+1) + ...sandNew(xind+1,yind+1).*vary1(xind,yind+1);temp2 = sandNew(xind+1,yind+1).*vary(xind,yind+1) + ...sandNew(xind,yind+1).*vary1(xind,yind+1);sandNew(xind,yind+1) = temp1;sandNew(xind+1,yind+1) = temp2;sand=sandNew;set(imh,'cdata',cat(3,z',sand',gnd'))drawnowend%build the GUI%define the plot buttonplotbutton=uicontrol('style','pushbutton','string','Run','fontsize',12, 'position',[100,400,50,20], 'callback', 'run=1;');%define the stop buttonerasebutton=uicontrol('style','pushbutton','string','Stop','fontsize',12,'position',[200,400,50,20],'callback','freeze=1;');%define the Quit buttonquitbutton=uicontrol('style','pushbutton','string','Quit','fontsize',12 ,'position',[300,400,50,20],'callback','stop=1;close;');number = uicontrol('style','text', 'string','1', 'fontsize',12,'position',[20,400,50,20]);stop= 0; %wait for a quit button pushrun = 0; %wait for a drawfreeze = 0; %wait for a freezewhile (stop==0)if (run==1)%nearest neighbor sumsum(x,y) = cells(x,y-1) + cells(x,y+1) +cells(x-1, y) + cells(x+1,y)+cells(x-1,y-1) + cells(x-1,y+1) + cells(3:n,y-1) + cells(x+1,y+1);% The CA rulecells = (sum==3) | (sum==2 & cells);%draw the new imageset(imh, 'cdata', cat(3,cells,z,z) )%update the step number diaplaystepnumber = 1 + str2num(get(number,'string'));set(number,'string',num2str(stepnumber))endif (freeze==1)run = 0;freeze = 0;enddrawnow %need this in the loop for controls to workend。
基于元胞自动机的沙堆模型并行计算

第39卷第4期四川大学学报(工程科学版)V o.l39No.4 2007年7月J O URNAL OF S I CHUAN UNI VERS I TY(ENGI NEER I NG SC I ENCE ED I TI ON)J u l y2007文章编号:1009 3087(2007)04 0040 04基于元胞自动机的沙堆模型并行计算苏凤环1,姚令侃1,李洪波2(1.西南交通大学土木工程学院道路与铁道工程系,四川成都610031;2.中国石油大学(华东)储运与建筑工程学院,山东东营257061)摘 要:为了研究大规模沙堆模型的自组织临界性,必须进行大量计算,为了克服原有串行计算技术浪费大量时间的缺点,引入并行计算技术。
利用M P I消息传递和C语言,采用主从模式编程实现沙堆模型的并行算法。
仿真实验结果表明:当模型格点总数不大时,并行计算的优势并不能很好地体现出来;但当模型规模增大到L 200后,并行计算时间大大缩短,取得较好的加速比。
将并行计算技术应用到二维沙堆模型,将会减少大规模模型的计算时间,提高计算效率,为下一步研究自组织临界性是否具有尺度效应提供可借鉴的经验。
关键词:元胞自动机;沙堆模型;自组织临界性;并行计算;消息传递中图分类号:TP311.11文献标识码:AParall el Co m putation of Sand Pile M odel Based on Cell ular Auto m ataSU F eng huan1,YAO L ing kan1,LI H ong bo2(1.Dep t.ofRoad and Rail w ay E ng.,Sou t hw est Jiaot ong Un i v.,Chengdu610031,Ch i n a;2.College ofA rch itect u re and Storage Eng.,Ch i na Un iv.of Petrol eum,Dongyi ng257061,Ch i na)Abst ract:It needed do a lot of co m putati o n i n order to st u dy t h e self or gan ized critical o f large sca le sandp ile.Par alle l progra mm i n g w as intr oduced to overco m e the sho rtco m i n g that serial progra m w astes a great deal of ti m e.The para lle l a l g orith m of sandpile mode l w as rea lized by usi n g m aster slave m ode through m essage passi n g i n terface (MPI)and C.The si m u lation resu lt sho w ed that the advantage of parallel co m putati o n cou l d n t exh i b itwhen m od el scale w as s m al.l The para llel co m putati o n ti m e w ou l d shorten and got good acce lera ti o n ratio when m odel scale w as larger than200.The applicati o n of parallel technique to t w o d i m ensi o n sandpile m ode l usua lly shortens co mpu tation ti m e and increases efficiency.Itw ou l d pr ov i d e exper i e nce to study whether se lf organized critical had scale effect f u rther.K ey w ords:ce llular auto m a ta;sand pile m ode;l se lf organ ized critica;l parallel co m putation;MPI作为控制大量广延耗散动力系统(Spatiall y ex tended dyna m ical syste m s)的普遍组织原则,Bak、Tang 与W iesen feld提出了自组织临界性(Self Organized收稿日期:2006-04-14基金项目:国家自然科学基金资助项目(50478085);国家自然科学基金西部重大研究计划资助项目(90202007)作者简介:苏凤环(1977-),女,博士生.研究方向:道路与铁道工程.E mai:l sf h l zz@yahoo.co C ritica lity,简称SOC)的概念[1-2]。
元胞自动机的沙堆模型的Matlab模拟
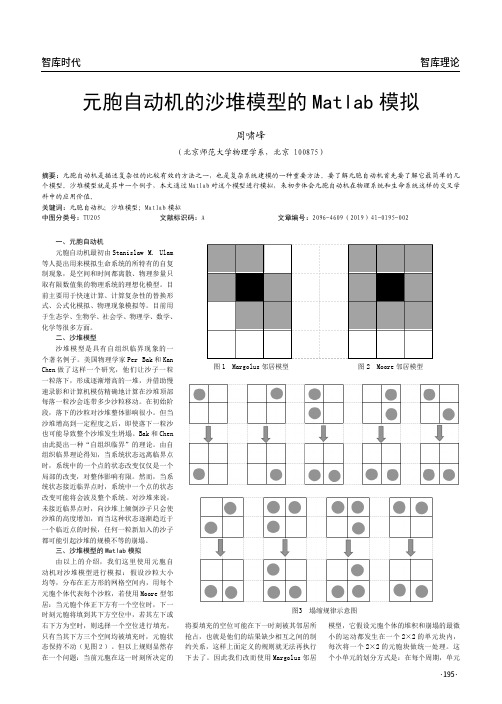
智库时代 ·195·智库理论元胞自动机的沙堆模型的Matlab 模拟周啸峰(北京师范大学物理学系,北京 100875)摘要:元胞自动机是描述复杂性的比较有效的方法之一,也是复杂系统建模的一种重要方法。
要了解元胞自动机首先要了解它最简单的几个模型。
沙堆模型就是其中一个例子,本文通过Matlab 对这个模型进行模拟,来初步体会元胞自动机在物理系统和生命系统这样的交叉学科中的应用价值。
关键词:元胞自动机;沙堆模型;Matlab 模拟中图分类号:TU205文献标识码:A 文章编号:2096-4609(2019)41-0195-002 一、元胞自动机元胞自动机最初由Stanislaw M. Ulam等人提出用来模拟生命系统的所特有的自复制现象,是空间和时间都离散、物理参量只取有限数值集的物理系统的理想化模型。
目前主要用于快速计算、计算复杂性的替换形式、公式化模拟、物理现象模拟等。
目前用于生态学、生物学、社会学、物理学、数学、化学等很多方面。
二、沙堆模型沙堆模型是具有自组织临界现象的一个著名例子。
美国物理学家Per Bak 和KanChen 做了这样一个研究,他们让沙子一粒一粒落下,形成逐渐增高的一堆,并借助慢速录影和计算机模仿精确地计算在沙堆顶部每落一粒沙会连带多少沙粒移动。
在初始阶段,落下的沙粒对沙堆整体影响很小。
但当沙堆增高到一定程度之后,即使落下一粒沙也可能导致整个沙堆发生坍塌。
Bak 和Chen由此提出一种“自组织临界”的理论。
由自组织临界理论得知,当系统状态远离临界点时,系统中的一个点的状态改变仅仅是一个局部的改变,对整体影响有限。
然而,当系统状态接近临界点时,系统中一个点的状态改变可能将会波及整个系统。
对沙堆来说,未接近临界点时,向沙堆上倾倒沙子只会使沙堆的高度增加,而当这种状态逐渐趋近于一个临近点的时候,任何一粒新加入的沙子都可能引起沙堆的规模不等的崩塌。
三、沙堆模型的Matlab 模拟由以上的介绍,我们这里使用元胞自动机对沙堆模型进行模拟:假设沙粒大小均等,分布在正方形的网格空间内,用每个元胞个体代表每个沙粒,若使用Moore 型邻居:当元胞个体正下方有一个空位时,下一时刻元胞将填到其下方空位中,若其左下或右下方为空时,则选择一个空位进行填充,只有当其下方三个空间均被填充时,元胞状态保持不动(见图2)。
matlab元胞自动机冰晶源代码

文章标题:深入探讨matlab元胞自动机冰晶源代码在计算机科学和数学领域中,元胞自动机(CA)是一种重要的数学模型,用于模拟复杂系统的行为和演变。
其中,matlab元胞自动机冰晶源代码是一个值得深入研究和探讨的主题。
在本文中,我将从简到繁地介绍matlab元胞自动机冰晶源代码,并共享对这一主题的观点和理解。
1. 简介matlab元胞自动机冰晶源代码是一个基于matlab编程语言开发的工具,用于模拟冰晶的生长和演变过程。
该源代码基于元胞自动机模型,通过规则和邻居交互的方式,模拟冰晶的晶体生长过程。
这一模型在材料科学、地质学和生物学领域有着广泛的应用,因此对其进行深度研究具有重要意义。
2. 基本原理matlab元胞自动机冰晶源代码的基本原理是通过网格和元胞的方式,将冰晶结构离散化表示。
在模拟过程中,每个元胞代表一个冰晶分子,根据一定的生长规则和邻居元胞的状态进行交互,从而模拟整个冰晶的形态演变。
这一过程可以有效地模拟冰晶在不同条件下的生长规律,为科学研究和工程应用提供重要参考。
3. 代码实现matlab元胞自动机冰晶源代码的实现涉及到网格的初始化、元胞状态的更新和模拟结果的可视化等过程。
在代码实现中,需要考虑冰晶生长的规则、边界条件的处理以及参数的设置等方面。
通过合理的编程和算法设计,可以实现对冰晶生长过程的精确模拟,并获得可靠的模拟结果。
4. 应用与拓展matlab元胞自动机冰晶源代码在材料科学、地质学和生物学等领域具有广泛的应用前景。
通过对冰晶生长规律的模拟和研究,可以深入理解材料的微观结构和性质,为新材料的设计和应用提供指导。
该源代码也可作为元胞自动机模型的拓展,用于模拟其他复杂系统的行为和演变,具有重要的科学意义和工程价值。
总结与回顾通过本文的介绍,我们对matlab元胞自动机冰晶源代码有了一定的了解。
该源代码基于元胞自动机模型,能够模拟冰晶的生长过程,具有重要的科学和工程应用价值。
在未来的研究中,我们可以进一步探讨其在领域中的应用,并发展出更多的拓展性工作,为复杂系统的模拟和研究提供新的思路和方法。
元胞自动关机模型

生命游戏
生命游戏是英国数学家约翰〃何顿〃康威在 1970年发明的细胞自动机。
生命游戏
生命游戏
每个格子的生死遵循下面的原则:
1.
如果一个细胞周围有3个细胞为生(一个细胞周围 共有8个细胞),则该细胞为生(即该细胞若原先 为死,则转为生,若原先为生,则保持不变) 。 2. 如果一个细胞周围有2个细胞为生,则该细胞的生 死状态保持不变; 3. 在其它情况下,该细胞为死(即该细胞若原先为 生,则转为死,若原先为死,则保持不变)
双道,规则类似于练习1,需要考虑换道
p
x
p
p
Lane 1
q p
p p
q
Lane 2
直行成功概率0.7,换 道成功概率0.3
Nagel –Schreckenberg(NS) 模型
Nagel –Schreckenberg(NS) 模型
Nagel –Schreckenberg(NS) 模型
Nagel –Schreckenberg(NS) 模型
Nagel –Schreckenberg(NS) 模型
Nagel –Schreckenberg(NS) 模型
元胞自动机的定义
不同于一般的动力学模型,元胞自动机 不是由严格定义的物理方程或函数确定,而 是用一系列模型构造的规则构成。凡是满足 这些规则的模型都可以算作是元胞自动机模 型。因此,元胞自动机是一类模型的总称, 或者说是一个方法框架。其特点是时间、空 间、状态都离散,每个变量只取有限多个状 态,且其状态改变的规则在时间和空间上都 是局部的。
Nagel –Schreckenberg(NS) 模型
NS 模型是能正确模拟交 通现象的最简单的模型 NS模型的更新规则如下: 1. 加速过程:
CA元胞自动机优化模型原代码
CA优化模型原代码:M=load(‘d:\ca\jlwm’)N=load(‘d:\ca\jlwn.asc’)lindishy=load(‘d:\ca\ldfj3.asc’)caodishy=load(‘d:\ca\cdfj3.asc’)gengdishy=load(‘d:\ca\htfj3.asc’)[m,n]=size(M);Xr=[1 1 -1 1 1 1 -1 -1 1 1;1 1 1 1 -1 -1 1 1 1 -1;-1 1 1 1 -1 -1 -1 1 -1 -1;1 1 1 1 1 1 -1 1 1 I; l -1 -1 1 1 -1 -1 -1 1 1;1 -1 -1 1 -1 1 -1 1 -1 -1;-1 1 -1 -1 -1 -1 1 -1 -1 -1;-1 1 1 1 -1 1 -1 1 -1 -1;1 1 -1 1 1 -1 -1 -1 1 1;1 -1 -1 1 1 -1 -1 -1 1 1];caodi=0;lindi=0;gengdi=0;for i=1:mforj=l:nif M(i,j)==4caodi=caodi+1;elseif M(i,j)==3lindi=lindi+1;elseif M(i,j)==2gengdi=gengdi+1;endendendfor i=1:mfor j=1:nif M(i,j)==4if lindishy(i,j)>gengdishy(i,j)if lindishy(i,j)>caodishy(i,j)z=0;for P=max(1,i-1):min(i+1,m)for q=max(j-1,1):min(j+1,n)if (M(p,q)~=0)&&xr(M(p,q),3)==-1z=1;endendendif z== 0caodi=eaodi-1;M(i,j)=3;lindi=lindi+1;endelseif lindishy(i,j)==caodishy(i,j)caoditemp=0;linditemp=0;gengditemp=0;for p=max(1,i-1):min(i+1,m)for q=max(j-1,1):min(i+1,n)if N(p,q)==4caoditemp=caoditemp+1;elseif N(p,q)==3linditemp=linditemp+1;elseif N(p,q)=2gengditemp=gengditemp+1;endendendif linditemp>=max(caoditemp,gengditemp) z=0;for p=max(1,j-1):min(i+1,m)for q=max(j-1,1):min(j+1,n)if(M(p,q)~=0)&&xr(M(p,q),3)==-1;z=1;endendendif Z==0caodi=caodi-1;M(i,j)=3;lindi=lindi+1;endendendelseif lindishy(i,j)==gengdishy(i,j)if lindishy(i,j)>caodishy(i,j)caoditemp=0:linditemp=0;gengditemp=0:for p=max(1,i-1):min(i+1,m)for q=max(j-1,1):min(j+1,n)if N(p,q)==4caoditemp=caoditemp+1;elseif N(p,q)==3linditemp=linditemp+1;elseif N(p,q)==2gengditemp=gengdltemp+1;endendendif linditemp>=gengditempfor p=max(1,j-1):min(i+1,m)for q=max(j-1,1):min(j+1,n)if (M(p,q)~=0)&&xr(M(p,q),3)==-1z=1;endendendif z==0caodi=caodi-1;M(i,j)=3;lindi=lindi+1;endendelseif lindishy(i,j)==caodishy(i,j) caoditemp=0;linditemp=0;gengditemp=0;for p=max(i,i-1):min(i+1,m)for q=max(j-1,1):min(j+1,n)if N(p,q)==4caoditemp=caoditemp+1;elseif N(p,q)==3linditemp=linditemp+1;elseif N(p,q)==2gengditemp=gengditemp+1;endendendif linditemp>=max(caoditemp,gengditemp) z=0;for p=max(1,i-1):min(i+1,m)for q=max(j-1,1):min(j+1,n)if(M(p,q)~=0)&&xr(M(p,q),3)==-1z=1;endendendif z==0caodi=caodi-1;M(i,j)=3;lindi=lindi+1;endendendelseif M(i,j)==2if lindishy(i,j)>gengdishy(i,j)if lindishy(i,j)>caodishy(i,j)z=0;for p=max(1,i-1):min(i+1,m)for q=max(j-1,1):min(j+1,n)if(M(p,q)~=0)&&xr(M(p,q),3)==-1z=1;endendendif z==0M(i,j)=3;Lindi=lindi+1;gengdi=gengdi-1;endelseif lindishy(i,j)==caodishy(i,j) caoditemp=0;linditemp=0;gengditemp=0;for p=max(1,i-1):min(i+1,m)for q=max(j-1,1):min(j+1,n)if N(p,q)==4caoditemp=caoditemp+1;elseif N(p,q)==3linditemp=linditemp+1;elseif N(p,q)==2gengditemp=gengditemp+1;endendendif linditemp>=max(caoditemp,gengditemp) z=0;for p=max(1,i-1):min(i+1,m)for q=max(j-1,1):min(j+1,n)if(M(p,q)~=0)&&xr(M(p,q),3)==-1z=1;endendendif z==0M(i,j)=3;lindi=lindi+1;gengdi=gengdi-1endelseif caoditemp>= gengditemp biaoji=0;for p=max(1,i-1):min(i+1,m)for q=max(j-1,1):min(j+1,n)if(M(p,q)~=0)&&xr(M(p,q),4)==-1 z=1;endendendif z==0M(i,j)=4;caodi=caodi+1;gengdi=gengdi-1;endendelseif lindishy(i,j)<caodishy(i,j)z=0;for p=max(1,i-1):min(i+1,m)for q=max(j-1,1):min(j+1,n)if(M(p,q)~=0)&&xr(M(p,q),4)==-1 z=1;endendendif z==0M(i,j)=4;caodi=caodi+1;gengdi=gengdi-1;endendelseif lindishy(i,j)==gengdishy(i,j) if lindishy(i,j)<caodishy(i,j)z=0;for p=max(1,i-1):min(i+1,m)for q=max(j-1,1):min(j+1,n)if(M(p,q)~=0)&&xr(M(p,q),4)==-1 z=1;endendendif biaoji==0M(i,j)=4;caodi=caodi+1;gengdi=gengdi-1;endelseif lindishy(i,j)>caodishy(i,j) caoditemp=0;linditemp=0;gengditemp=0;for p=max(1,i-1):min(i+1,m)for q=max(j-1,1):min(j+1,n)if N(p,q)==4caoditemp=caoditemp+1;elseif N(p,q)==3linditemp=linditemp+1;elseif N(p,q)==2gengditemp=gengditemp+1; endendendif linditemp>= gengditempz=0;for p=max(1,i-1):min(i+1,m)for q=max(j-1,1):min(j+1,n)if(M(p,q)~=0)&&xr(M(p,q),3)==-1 z=1;endendendif z==0M(i,j)=3;lindi=lindi+1;gengdi=gengdi-1endendelsecaoditemp=0;linditemp=0;gengditemp=0;for p=max(1,i-1):min(i+1,m)for q=max(j-1,1):min(j+1,n)if N(p,q)==4caoditemp=caoditemp+1;elseif N(p,q)==3linditemp=linditemp+1;elseif N(p,q)==2gengditemp=gengditemp+1;endendendif linditemp>=max(caoditemp,gengditemp) z=0;for p=max(1,i-1):min(i+1,m)for q=max(j-1,1):min(j+1,n)if(M(p,q)~=0)&&xr(M(p,q),3)==-1z=1;endendendif z==0M(i,j)=4;lindi=lindi+1;gengdi=gengdi-1endelseif caoditemp>= gengditempz=0;for p=max(1,i-1):min(i+1,m)for q=max(j-1,1):min(j+1,n)if(M(p,q)~=0)&&xr(M(p,q),4)==-1z=1;endendendif z==0M(i,j)=4;caodi=caodi+1;gengdi=gengdi-1;endendendelseifgengdishy(i,j)<caodishy(i,j)z=0;for p=max(1,i-1):min(i+1,m)for q=max(j-1,1):min(j+1,n)if(M(p,q)~=0)&&xr(M(p,q),4)==-1z=1;endendendif z==0M(i,j)=4;caodi=caodi+1;gengdi=gengdi-1;endelseif gengdishy(i,j)==caodishy(i,j) elseif lindishy(i,j)==caodishy(i,j) caoditemp=0;linditemp=0;gengditemp=0;for p=max(1,i-1):min(i+1,m)for q=max(j-1,1):min(i+1,n)if N(p,q)==4caoditemp=caoditemp+1;elseif N(p,q)==3linditemp=linditemp+1;elseif N(p,q)=2gengditemp=gengditemp+1; endendendif caoditemp>= caoditempz=0;for p=max(1,j-1):min(i+1,m)for q=max(j-1,1):min(j+1,n)if(N(p,q)~=0)&&xr(M(p,q),4)==-1; z=1;endendendif Z==0M(i,j)=4;caodi=caodi+1;gengdi=gengdi-1;endendendendendendendfid=fopen(‘d:\ca\lucc’,’at+’)for i=1:mfor j=1:nif M(i,j)>4.5M(i,j)=N(i,j);endfprintf(fid,’%d’, M(i,j)); endfprintf(fid,,’\n’);endfclose(fid);。
基于元胞自动机模型的沙堆稳定模型建立
基于元胞自动机模型的沙堆稳定模型建立摘要:世界上任何一个有休闲海滩的地方,似乎都有人在海边建沙堡。
不可避免地,海浪的流入和涨潮侵蚀了沙堡。
然而,并非所有沙坑对波浪和潮汐的反应都是一样的。
本文旨在通过建立数学模型来建立更稳定的沙堡。
为了保持沙堡基础在波浪和潮汐作用下的稳定性,从结构力学和流体力学的知识出发,有必要尽可能减轻水流对地基的影响,减少地基砂的损失,保证地基的稳定。
受鱼流线的启发,基座是由四分之一椭圆曲线和旋转180°的抛物线组成的半旋转结构。
建立了半旋转体D0的最大半径、四分之一椭圆的半长轴LE、抛物线的水平投影长度LR、地基的总长度L和冲击力与地基体积的比值之间的函数关系。
采用最优模型求解地基的最小冲击力与体积比D0= 0.22L,LE=0.63L,LR= 0.37 L,是最佳的三维砂土地基模型。
利用元胞自动机模拟砂土地基的形成过程,对砂地基模型进行优化,以两个砂桩的塌陷间隔长度为指标,测量砂桩基础的稳定性;从而确定了雨作用下沙基基础最稳定的三维形状。
关键词:流线结构、元胞自动机模型一、问题分析我们针对海浪和潮汐对沙堆基础的影响分析中,我们主要考虑了来自侧向的水流冲击力对基础的影响,此时保持沙堆基础稳定性的一大主要因素是沙堆水平方向上的粘接力,如果将沙堆基础视为一个整体,那么基础整体与沙滩的水平向摩擦力保持了沙堆基础的稳定性。
而雨水对于沙堆的作用力主要表现垂直方向上的冲击力,如果将沙堆基础视为一个整体,那么沙滩对沙堆垂直向上方向的支持力作为保持沙堆基础稳定性的主要因素。
由受力结构分析,第一问所建立的模型为流线型结构,对雨水垂直向下的的作用有一定缓解作用,但显然不是抵抗雨水的最优结构。
我们对上述模型进行优化,假设沙堆基础受到每一滴雨水的性质相同,那么基础结构仍为半旋体结构,为了方便分析我们对沙堆基础的侧面进行分析。
二、模型建立我们这里使用元胞自动机对沙堆模型进行模拟,从上至下掉落的沙粒将使沙堆不断堆积,当达到一定的临界高度后沙堆即发生崩塌,我们认为崩塌后的沙堆基础本身是一个比较稳定的结构,而两次崩塌之间的时间间隔的长度也就代表了沙堆基础的稳定型结构。
交通流元胞自动机源代码

用Matlab实现元胞自动机(网上收集、转载)技术2010-03-13 13:04:28 阅读121 评论0 字号:大中小订阅.file:life.m%% 初始化m = 50;X = zeros(m,m);X(25,25) = 1;n = [m 1:m-1];e = [2:m 1];s = [2:m 1];w = [m 1:m-1];% 绘制初始图形[i,j] = find(X);figure(gcf);plothandle = plot(i,j,'.', ...'Color','blue', ...'MarkerSize',12);axis([0 m+1 0 m+1]);%% 演化for k = 1:50%邻居数N = X(n,:) + X(s,:) + X(:,e) + X(:,w) + ...X(n,e) + X(n,w) + X(s,e) + X(s,w);%概率阵RAND = rand(m);%换代X = X | (N.*RAND>0.99);%绘图[i,j] = find(X);set(plothandle,'xdata',i,'ydata',j)drawnowpause(0.2)kendfile 2:function sierpinski(n);% 使用元胞自动机生成sierpinski直角垫片% Example:% sierpinski(256);% %算法见:孙博文,《分形算法与程序设计:用Visual C++实现》if nargin==0;n=256;endX=ones(n);X(1,n-1)=0;H=imshow(X,[]);set(gcf,'doublebuffer','on');k=1;while k<n;X(k+1,1:end-1)=xor(X(k,1:end-1),X(k,2:end));X(k+1,n)=1;set(H,'CData',X);pause(0.1);k=k+1;endfile 3:function CA_sim_cloud;% 使用元胞自动机模拟地球卫星的云图%% reference:% Piazza, E.; Cuccoli, F.;% Cellular Automata Simulation of Clouds in Satellite Images,% Geoscience and Remote Sensing Symposium, 2001. IGARSS '01. % IEEE 2001 International Volume 4, 9-13 July 2001 Page(s):% 1722 - 1724 vol.4 Digital Object Identifier 10.1109/IGARSS.% 2001.977050time=888; % 程序执行步数M=240;N=320;S=round(rand(M,N)*15);p=[1,2,1,6,6,1,2,1];p=sum(tril(meshgrid(p)),2)/20;rand('state',0);SS=S;R=rand(M,N);G=R;B=R;C=cat(3,R,G,B);fig=figure;set(fig,'DoubleBuffer','on');mov = avifile('example2.avi');cc=imshow(C,[]);set(gcf,'Position',[13 355 157 194])x1=(1:3)+round(M/2);y1=(1:3)+round(N/3);x2=(1:3)+round(M/3);y2=(1:3)+round(N/2);x3=(1:3)+round(M/1.5);y3=(1:3)+round(N/2);q=0;qq=15/4;while q<time;SS=zeros(M,N);for k=1:15;r=rand(M,N); % 生成几率rK=zeros(M+2,N+2);T=(S-k>=0); % 粒子数矩阵K(2:end-1,2:end-1)=T;SS=K(1:end-2,1:end-2).*(r<p(1))+...K(1:end-2,2:end-1).*(r<p(2) & r>=p(1))+...K(1:end-2,3:end).*(r<p(3) & r>=p(2))+...K(2:end-1,1:end-2).*(r<p(4) & r>=p(3))+...K(2:end-1,3:end).*(r<p(5) & r>=p(4))+...K(3:end,1:end-2).*(r<p(6) & r>=p(5))+...K(3:end,2:end-1).*(r<p(7) & r>=p(6))+...K(3:end,3:end).*(r>=p(7))+SS;endS=SS; %SS是粒子扩散后的分布S(S>15)=15;S(x1,y1)=15;S(x2,y2)=15;S(x3,y3)=15; % 粒子源赋值G=(S<=7.5);B=(S>qq);R=(S>qq & S<=7.5);C=double(cat(3,R,G,B));set(cc,'CData',C);q=q+1;pause(0.2);title(['q=',num2str(q)]);Nu(q)=sum(S(1:end));F = getframe(gca);mov = addframe(mov,F);endmov = close(mov);figure;plot(Nu)file 4:题目: 六边形的元胞自动机上的单粒子运动摘要: 本程序在六边形的元胞自动机上模拟单粒子运动,算法是基于FHP规则.元胞自动机模拟地球卫星的云图关键词: 六边形, 元胞自动机, FHP规则figure('Position',[15 30 997 658],'NumberTitle','off');set(gcf,'name',' 六边形的元胞自动机上的单粒子运动');% Author's email: zjliu2001@% Reference:% U. Frisch, B. Hasslacher, Y. Pomeau, Lattice-gas% automata for the Navier-Stokes rquation, Phys. Rev.% Lett. 1986,56: 1505-1508set(gcf,'DoubleBuffer','on');axis square;box on;set(gca,'XColor','r','YColor','r');set(gca,'Position',[-0.01 0.11 0.775 0.815]);L=17.5*0.1/sqrt(3);axis([0,L,0,1]); hold on;for p=0:.1:0.9;plot([0,(1-p)/sqrt(3)],[p,1],'k');endfor p=0:0.1/sqrt(3):1;plot([p,min(p+1/sqrt(3),17.5*0.1/sqrt(3))],[0,min(1,(L-p)*sqrt(3))],'k');endfor p=0:0.1/sqrt(3):1;plot([0,p],[p*sqrt(3),0],'k');endfor p=0:9;plot([L-[0.05+p/10]/sqrt(3),L],[1,1-[0.05+p/10]],'k');endfor p=0:0.05:1;plot([0,L],[p,p],'k');endpo=plot(0.8/sqrt(3),0.5,'r.','markersize',24);pz=0.8/sqrt(3)+0.5i; % the position of read pointA=pi/3*2; % the movement direction of read pointgc=gca;a1=axes('Position',[0.7,0.5,0.25,0.3]);axis square;hold on;axis([0,1,0,1]);plot([0.5+0.5i,(1+i)/2+0.4*exp(i*pi/3*2)]);plot([0.5+0.5i,(1+i)/2+0.4*exp(i*pi/3)]);plot([0.3,0.7],[0.5,0.5]);text(0.2,0.8,'Y','fontsize',14);text(0.73,0.8,'X','fontsize',14);text(0.2,0.4,'Z','fontsize',14);axes(gc);dt=0.1/sqrt(3); k=0;ses=['while k;',...'pz=pz+dt*exp(i*A);',...'if imag(pz)>0.99 | imag(pz)<0.01;',...' A=-A;',...'end;',...'if real(pz)>0.99 | real(pz)<0.01;',...' A=-A-pi;',...'end;',...'set(po,''XData'',real(pz),''YData'',imag(pz));',...'pause(0.2);',...'end;'];po1=uicontrol(gcf,'style','push',...'unit','normalized','position',[0.74,0.87,0.1,0.08],...'string','start','fontsize',18,'callback',[]);set(po1,'callback',['k=~k;if k==1;',...'set(po1,''string'',''stop'');',...'else set(po1,''string'',''start'');',...'end;',ses]);file 5:% DLA%%%%%来源:萝卜驿站/ clc;clear;close all;S=ones(40,100);% state matrixS(end,:)=0; % initial sttaeSs=zeros(size(S)+[1,0]); % top line is origin of particle Ss(2:end,:)=S; % showing matrixN=size(S,2);II=imagesc(Ss);axis equal;colormap(gray)set(gcf,'DoubleBuffer','on');while sum(1-S(1,:))<0.5;y=1;x=round(rand*[N-1]+1); % random positionD=0;while D<0.5; % random travelr=rand;if abs(x-1)<0.1;SL=1;elseSL=S(y,x-1);endif abs(x-N)<0.1;SR=1;elseSR=S(y,x+1);endif SL+SR+S(y+1,x)<2.5; % check the neighbor: left, right, under D=1;S(y,x)=0; % stop in the positionendif r<=1/3; % travel randomlyx=x-1;elseif r<=2/3;x=x+1;elsey=y+1;endSs(2:end,:)=S;if x<0.5|x>N+0.5;D=1; % out of the rangeelseSs(y,x)=0; % to show the moving particleendset(II,'CData',Ss); % to showpause(0.1);endendfile 6:function sands(N);% 砂堆规则% 参考书目:% 物理系统的元胞自动机模拟% 作者:(英国)肖帕德等著、祝玉学等译close allfigure;set(gcf,'Doublebuffer','on');D=ones(N);D1=D;[X,Y]=meshgrid(1:N);Z=2*X-Y;p=fix(9.5*N/21);D(Z>p & Z<9+p)=0;D(fix(end/2)+1:end,:)=1;D=min(D,flipud(D).*D1);D=min(D,fliplr(D).*D1);D(end,fix(end/4.13):end-fix(end/4.13))=0; D(end-1,fix(end/4.12):end-fix(end/4.12))=0; D(end-2,fix(end/4.1):end-fix(end/4.1))=0; % imshow(D,[])% 以上是生成装砂的瓶子B=ones(N);B(Z>9+p)=0;B(fix(end/2)+1:end,:)=1;B(:,fix(end/2)+1:end)=1;B=min(B,fliplr(B));B(1:3,:)=1;% figure;set(gcf,'Doublebuffer','on');% imshow(B,[])% mov = avifile('example2900.avi');kk=3800;for k=1:kk;[B,Nu]=duisha(D,B);Bk=min(D,B);imshow(Bk,[])Ha(k)=Nu;% F = getframe(gca);% mov = addframe(mov,F);end% mov = close(mov);figure;plot(Ha)function [Y,Nu]=duisha(D,B);Dq=10*(1-D);Bg=1-B+Dq;% 研究砂子下落S=zeros(size(B));S1=S;S2=S;S(2:end,:)=Bg(2:end,:)-Bg(1:end-1,:);S1(S==-1)=1;S2(1:end-1,:)=S1(2:end,:);Bg(S1==1)=~Bg(S1==1);Bg(S2==1)=~Bg(S2==1);% 研究砂子倾倒clear Sclear S1clear S2S=zeros(size(B));S1=S;S2=S;S(1:end-1,2:end-1)=Bg(1:end-1,2:end-1)+Bg(2:end,2:end-1)-Bg(2:end,1:end-2); S1(S==2)=1;S2(2:end,1:end-2)=S1(1:end-1,2:end-1);Bg(S1==1)=0;Bg(S2==1)=1;clear Sclear S1clear S2S=zeros(size(B));S1=S;S2=S;S(1:end-1,2:end-1)=Bg(1:end-1,2:end-1)+Bg(2:end,2:end-1)-Bg(2:end,3:end); S1(S==2)=1;S2(2:end,3:end)=S1(1:end-1,2:end-1);Bg(S1==1)=0;Bg(S2==1)=1;Y=(1-Bg).*D;Nu=prod(size(find(Y==0)));file 7:function CA_sim_cloud;% 使用元胞自动机模拟地球卫星的云图%% reference:% Piazza, E.; Cuccoli, F.;% Cellular Automata Simulation of Clouds in Satellite Images,% Geoscience and Remote Sensing Symposium, 2001. IGARSS '01.% IEEE 2001 International Volume 4, 9-13 July 2001 Page(s):% 1722 - 1724 vol.4 Digital Object Identifier 10.1109/IGARSS.% 2001.977050time=500; % 程序执行步数M=240;S=zeros(M,N);p=[1,2,1,6,6,1,2,1];p=sum(tril(meshgrid(p)),2)/20;rand('state',0);SS=S;R=1-S;G=S;B=S;C=cat(3,R,G,B);figure;cc=imshow(C,[]);x=round(M/2);y=(1:3)+round(N/3);q=0;while q<time;SS=zeros(M,N);for k=1:15;r=rand(M,N); % 生成几率rK=zeros(M+2,N+2);T=(S-k>=0); % 粒子数矩阵K(2:end-1,2:end-1)=T;SS=K(1:end-2,1:end-2).*(r<p(1))+...K(1:end-2,2:end-1).*(r<p(2) & r>=p(1))+...K(1:end-2,3:end).*(r<p(3) & r>=p(2))+...K(2:end-1,1:end-2).*(r<p(4) & r>=p(3))+...K(2:end-1,3:end).*(r<p(5) & r>=p(4))+...K(3:end,1:end-2).*(r<p(6) & r>=p(5))+...K(3:end,2:end-1).*(r<p(7) & r>=p(6))+...K(3:end,3:end).*(r>=p(7))+SS;endS=SS; %SS是粒子扩散后的分布S(S>15)=15;S(x,y)=15; % 粒子源赋值G=(S<=10);B=(S>5);R=(S>5 & S<=10);C=double(cat(3,R,G,B));set(cc,'CData',C);q=q+1;pause(0.2);title(['q=',num2str(q)]);Nu(q)=sum(S(1:end));endfigure;file 8:生命游戏(Came of Life)是J. H. Conway在20世纪60年代末设计的一种单人玩的计算机游戏(Garclner,M.,1970、1971)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
function[]=testCA(n)
z=zeros(n,n);
cells=z;
cells(n/2,.25*n:.75*n)=1;
cells(.25*n:.75*n,n/2)=1;
imh=image(cat(3,cells,z,z));
set(imh,'erasemode','none')
axis equal
axis tight
%Ö÷º¯Êý²ÎÊý
nx=52;%must be divisible by4
ny=100;
Pbridge=.05;
z=zeros(nx,ny);
o=ones(nx,ny);
sand=z;
sandNew=z;
gnd=z;
gnd(1:nx,ny-3)=1;%the ground line
gnd(nx/4:nx/2+4,ny-15)=1;%the hole line
gnd(nx/2+6:nx,ny-15)=1;%the hole line
gnd(nx/4,ny-15:ny)=1;%side line
gnd(3*nx/4,1:ny)=1;
%Ö÷º¯Êý
for i=1:1000
p=mod(i,2);%margolis neighborhood
sand(nx/2,ny/2)=1;%add a grain at the top
%upper left cell update
xind=[1+p:2:nx-2+p];
yind=[1+p:2:ny-2+p];
%randomize the flow--10%of the time
vary=rand(nx,ny)<.9;
vary1=1-vary;
sandNew(xind,yind)=...
gnd(xind,yind).*sand(xind,yind)+...
(1-gnd(xind,yind)).*sand(xind,yind).*sand(xind,yind+1).*...
(sand(xind+1,yind+1)+(1-sand(xind+1,yind+1)).*sand(xind+1,yind));
sandNew(xind+1,yind)=...
gnd(xind+1,yind).*sand(xind+1,yind)+...
(1-gnd(xind+1,yind)).*sand(xind+1,yind).*sand(xind+1,yind+1).*...
(sand(xind,yind+1)+(1-sand(xind,yind+1)).*sand(xind,yind));
sandNew(xind,yind+1)=...
sand(xind,yind+1)+...
(1-sand(xind,yind+1)).*...
(sand(xind,yind).*(1-gnd(xind,yind))+...
(1-sand(xind,yind)).*sand(xind+1,yind).*(1-gnd(xind+1,yind)).*sand(xind +1,yind+1));
sandNew(xind+1,yind+1)=...
sand(xind+1,yind+1)+...
(1-sand(xind+1,yind+1)).*...
(sand(xind+1,yind).*(1-gnd(xind+1,yind))+...
(1-sand(xind+1,yind)).*sand(xind,yind).*(1-gnd(xind,yind)).*sand(xind,y ind+1));
%scramble the sites to make it look better
temp1=sandNew(xind,yind+1).*vary(xind,yind+1)+...
sandNew(xind+1,yind+1).*vary1(xind,yind+1);
temp2=sandNew(xind+1,yind+1).*vary(xind,yind+1)+...
sandNew(xind,yind+1).*vary1(xind,yind+1);
sandNew(xind,yind+1)=temp1;
sandNew(xind+1,yind+1)=temp2;
sand=sandNew;
set(imh,'cdata',cat(3,z',sand',gnd'))
drawnow
end
%build the GUI
%define the plot button
plotbutton=uicontrol('style','pushbutton','string','Run','fontsize',12, 'position',[100,400,50,20],'callback','run=1;');
%define the stop button
erasebutton=uicontrol('style','pushbutton','string','Stop',
'fontsize',12,'position',[200,400,50,20],'callback','freeze=1;');
%define the Quit button
quitbutton=uicontrol('style','pushbutton','string','Quit','fontsize',12, 'position',[300,400,50,20],'callback','stop=1;close;');
number=uicontrol('style','text','string','1','fontsize',12,
'position',[20,400,50,20]);
stop=0;%wait for a quit button push
run=0;%wait for a draw
freeze=0;%wait for a freeze
while(stop==0)
if(run==1)
%nearest neighbor sum
sum(x,y)=cells(x,y-1)+cells(x,y+1)+cells(x-1,y)+cells(x+1,y)
+cells(x-1,y-1)+cells(x-1,y+1)+cells(3:n,y-1)+cells(x+1,y+1);
%The CA rule
cells=(sum==3)|(sum==2&cells);
%draw the new image
set(imh,'cdata',cat(3,cells,z,z))
%update the step number diaplay
stepnumber=1+str2num(get(number,'string'));
set(number,'string',num2str(stepnumber))
end
if(freeze==1)
run=0;
freeze=0;
end
drawnow%need this in the loop for controls to work
end。