伺服电机的资料
富士伺服说明书

概要1 - 1确认事项1 - 2伺服电机1 - 3 伺服放大器1 - 4 型号说明1-1(1) 警告标识的种类和意义安装、配线施工、维护、检查之前,请熟读和使用该手册及其它附属资料。
请在确认设备知识、安全信息及注意事项后,开始使用。
本手册将安全注意事项的等级划分为“危险”及“注意”。
警 告 标 识 含 义危 险该标识表示若错误操作,则有可能发生危险情况,从而造成死亡或重伤。
注 意该标识表示若错误操作,则有可能发生危险情况,从而造成人身受到中度伤害、轻伤以及仅设备受损。
另外,即使是记载在“注意”中的事项,也有可能因情况不同而导致严重后果。
标有警告标识的正文处均为重要内容,请遵守。
读完该手册后,请将其保管在使用人任何时候都能看到的地方。
(2) 符号根据需要采用符号,以便一看就能理解显示的要点。
符 号 含 义 符 号 含 义一般禁止 指示一般使用者的行为禁止触摸 务必接地禁止拆解 小心触电小心燃烧 小心高温安全注意事项1.使用注意事项危 险1.请绝对不要用手触及伺服放大器的内部。
否则有可能触电。
2.伺服放大器及伺服电机的地线端子务请接地。
否则有可能导致触电。
3.请在切断电源5分钟后进行配线和检查。
否则有可能导致触电。
4.请不要损伤电缆线、或对电缆线施加不必要的应力、压载重物、夹挤。
否则有可能导致故障、破损和触电。
5.运行过程中,请不要触摸伺服电机的旋转部分。
否则有可能受伤。
注 意1.请按指定的组合方式使用伺服电机和伺服放大器。
否则有可能发生火灾和故障。
2.请绝对不要在易于被溅到水的地方、腐蚀性气体的环境、易燃气体的环境及可燃物旁使用。
否则有可能发生火灾和故障。
3.伺服放大器、伺服电机及外围设备的温度较高,务请注意保持距离。
否则易烫伤。
4.在通电过程中及切断电源后一段时间内,伺服放大器的散热器、再生电阻器、伺服电机等有可能处于高温状态,故请不要触摸。
否则有可能烫伤。
5.最终产品内的伺服电机在运行过程中,若其表面温度超过70℃时,则请在最终产品上贴上小心高温的标签。
交流伺服电机
交流伺服电机交流伺服电机是一种广泛应用于工业自动化领域的电机类型,在现代生产中发挥着重要作用。
交流伺服电机通过内置的编码器反馈系统,可以实现精确的位置控制和速度控制,从而提高了生产效率和产品质量。
本文将介绍交流伺服电机的工作原理、应用领域以及优势特点。
工作原理交流伺服电机通过电子控制系统控制电流的大小和方向,从而控制电机转子的位置和速度。
其工作原理包括位置控制回路、速度控制回路和电流控制回路。
位置控制回路接收编码器反馈信号,比较目标位置和当前位置之间的差异,通过控制电流大小和方向来驱动电机转子转动至目标位置。
速度控制回路根据编码器反馈信号和设定速度值之间的差异,控制电机的转速。
电流控制回路则根据速度控制回路的输出,控制电机的电流大小和方向,以实现精确的速度控制。
应用领域交流伺服电机广泛应用于各种自动化设备和机械领域,如工业机器人、数控机床、包装设备、印刷设备等。
在这些领域,交流伺服电机可以提供精确的位置控制和速度控制,满足高效生产的需求。
同时,在医疗设备、航空航天等领域也有着重要应用,用于控制精密的运动系统。
优势特点交流伺服电机相比其他类型的电机具有以下优势特点:•高精度:交流伺服电机具有较高的控制精度,可以实现微米级的定位精度,适用于需要高精度控制的应用。
•高效率:交流伺服电机运行稳定,能够提供较高的效率,降低能源消耗,节省生产成本。
•响应速度快:交流伺服电机响应速度快,可以在短时间内实现从静止到目标速度的转变,提高生产效率。
•可编程控制:交流伺服电机可以通过程序控制实现各种运动模式和轨迹规划,满足不同应用的需求。
总体而言,交流伺服电机在工业自动化领域具有重要地位,通过其高精度、高效率和快速的特点,为生产提供了稳定可靠的动力支持。
本文简要介绍了交流伺服电机的工作原理、应用领域以及优势特点,希望能够帮助读者更好地了解交流伺服电机的基本知识。
伺服电机的工作原理

伺服电机的工作原理引言概述:伺服电机是一种常用的电动机,具有精确控制位置和速度的能力。
它在许多领域中广泛应用,如机器人技术、自动化生产线以及航空航天等。
本文将详细介绍伺服电机的工作原理。
一、电机构成1.1 电机转子伺服电机的转子通常由永磁体或电磁体组成。
永磁体转子由永磁材料制成,具有固定的磁场。
电磁体转子则通过电流激励产生磁场。
转子的磁场与定子的磁场相互作用,产生转矩,驱动电机运动。
1.2 电机定子伺服电机的定子由一组线圈组成,称为绕组。
绕组通常由导线绕制而成,通过电流激励产生磁场。
定子的磁场与转子的磁场相互作用,产生转矩,驱动电机运动。
1.3 电机控制器伺服电机的控制器是整个系统的核心部分。
它接收来自传感器的反馈信号,计算出控制电机运动所需的参数,并输出控制信号给电机驱动器。
控制器通过调整电机驱动器的输入信号,实现对电机的精确控制。
二、反馈系统2.1 位置反馈伺服电机通常配备位置传感器,用于实时监测电机转子的位置。
位置传感器可以是光电编码器、霍尔传感器或者磁编码器等。
通过获取转子位置信息,控制器可以实时调整电机的输出,使其达到预定位置。
2.2 速度反馈除了位置反馈,伺服电机还可以配备速度传感器,用于实时监测电机的转速。
速度传感器可以是霍尔传感器、转矩传感器或者光电编码器等。
通过获取转速信息,控制器可以精确控制电机的速度,使其满足应用需求。
2.3 加速度反馈为了更好地控制电机的运动过程,一些伺服系统还配备加速度传感器。
加速度传感器可以实时监测电机的加速度变化,从而帮助控制器更精确地调整电机的输出信号,使其实现平稳加速和减速。
三、闭环控制3.1 控制信号计算基于反馈系统提供的位置、速度和加速度信息,控制器通过算法计算出控制信号。
这些信号包含了电机的电流、电压或脉冲等信息,用于驱动电机。
3.2 控制信号输出控制信号由控制器输出给电机驱动器。
电机驱动器根据控制信号的特点,通过合适的方式调整电机的输入电流、电压或者脉冲信号,从而实现对电机的精确控制。
伺服电机参数资料

伺服电机参数资料伺服电机是一种特殊的电机,它能够提供精确的位置、速度和力控制。
伺服电机通常用于需要高精度运动控制的应用中,例如机器人、自动化系统、电子设备等。
下面将介绍伺服电机的一些重要参数资料。
1. 额定转速(Rated Speed):伺服电机的额定转速指的是电机在额定电压和负载条件下的最高转速。
额定转速是伺服电机在正常工作条件下的重要参考值。
2. 额定转矩(Rated Torque):伺服电机的额定转矩是指电机在额定电压和额定转速下能够提供的最大转矩。
额定转矩也是伺服电机在正常工作条件下的重要参考值。
3. 零转矩(Zero Torque):伺服电机在不带负载或无负载条件下的转矩。
零转矩可以用于伺服电机的调试和测试,也可以用于一些需要保持静止的应用。
4. 峰值转矩(Peak Torque):伺服电机能够瞬时提供的最大转矩。
峰值转矩是伺服电机在短时间内高负载工作时的重要参考值。
5. 抗扭刚度(Torsional Stiffness):伺服电机的抗扭刚度是指电机在扭转力作用下的变形能力。
抗扭刚度较高的伺服电机在高负载和高加速度下可以提供更稳定的性能。
6. 额定电压(Rated Voltage):伺服电机的额定电压指的是电机正常工作的电压范围。
额定电压通常由伺服电机的生产厂家确定,并在电机上标注。
7. 包络尺寸(Envelope Dimensions):伺服电机的包络尺寸指的是电机的外形尺寸。
包络尺寸对于伺服电机的安装和集成非常重要,需要与其他组件相匹配。
8. 功率(Power):伺服电机的功率是指电机输出的机械功率。
伺服电机的功率通常由转矩和转速确定。
9. 编码器分辨率(Encoder Resolution):伺服电机通常配备有编码器,用于提供位置反馈。
编码器分辨率指的是编码器每转的脉冲数,可以用来计算电机的位置和速度。
伺服电机的参数资料对于选择适合的电机和系统设计非常重要。
根据实际应用需求,选择合适的伺服电机可以提高系统性能和精度。
伺服电机控制的书
伺服电机控制的书伺服电机控制是一种常见的电机控制方式,它通过给电机提供恒定的电压或电流信号,以控制电机的位置、速度和力矩。
本文将介绍一些与伺服电机控制相关的参考内容。
1. 《电机控制技术》:这本书是电机控制领域的经典著作,全面介绍了电机控制的基础理论、控制方法和实际应用。
书中详细讲解了伺服电机的原理、控制算法以及硬件设计和参数调整等内容,对于初学者和专业人士都是很好的参考资料。
2. 《机电一体化系统设计与控制》:这本书从机电一体化系统的角度,介绍了伺服电机在系统中的应用和控制方法。
书中详细讲解了伺服电机的特点、控制原理和调试方法,以及与其他传感器和执行器的协同工作等内容。
对于机电一体化系统设计和控制的研究人员和工程师来说,这本书是很好的参考书籍。
3. 《运动控制系统设计与实现》:这本书介绍了运动控制系统的设计与实现,其中包括了伺服电机控制的内容。
书中详细讲解了伺服电机的运动控制方法、PID控制算法和反馈回路设计等,还包括了运动规划、轴联动和运动控制器的选择等方面的内容。
对于从事运动控制系统设计和实现的工程师和研究人员来说,这本书是很好的参考资料。
4. 《伺服系统及其应用技术》:这本书是针对伺服系统的基本原理和应用进行全面介绍的。
书中系统地讲解了伺服电机的构成、运动控制算法和参数调整方法,以及伺服控制系统的稳定性分析和性能评估等内容。
对于对伺服电机控制系统感兴趣的读者来说,这本书是一本很好的参考书。
5. 《电机与电力电子控制系统设计》:这本书着重介绍了电机控制系统的设计和实现方法,包括伺服电机的控制。
书中详细讲解了伺服电机的动态特性分析、控制器的设计方法以及反馈控制的实现等内容。
此外,还包括了电力电子器件的选型和电机驱动电路的设计等方面的内容。
对于从事电机控制系统设计和实现的工程师和研究人员来说,这本书是很好的参考资料。
综上所述,以上这些参考内容涵盖了伺服电机控制的基本原理、控制算法、硬件设计和参数调整等方面的内容,对于学习和研究伺服电机控制的读者来说是很好的参考资料。
伺服电机的工作原理
伺服电机的工作原理引言概述:伺服电机是一种常见的电动机,它通过控制系统来实现精确的位置和速度控制。
本文将详细介绍伺服电机的工作原理,包括其基本构成、控制原理、反馈系统、运动控制和应用领域等方面。
正文内容:1. 伺服电机的基本构成1.1 电机部分:伺服电机通常由电动机、减速器和编码器组成。
电动机负责提供动力,减速器用于降低输出速度并增加输出扭矩,编码器则用于反馈电机的位置信息。
1.2 控制部分:伺服电机的控制部分包括控制器、驱动器和传感器。
控制器负责接收控制信号并生成相应的控制指令,驱动器将控制指令转换为电机驱动信号,传感器用于实时监测电机的运动状态。
2. 伺服电机的控制原理2.1 位置控制:伺服电机通过控制器接收来自外部的位置指令,并将其与编码器反馈的位置信息进行比较,通过调整电机的转速和输出扭矩来实现精确的位置控制。
2.2 速度控制:伺服电机可以根据控制器接收到的速度指令,通过调整电机的输入电压和电流来实现精确的速度控制。
控制器会不断地监测电机的速度,并与设定的速度进行比较,以调整电机的输出。
2.3 加速度控制:伺服电机还可以实现精确的加速度控制。
控制器可以根据设定的加速度曲线,调整电机的输入信号,以实现平滑的加速和减速过程。
3. 伺服电机的反馈系统3.1 位置反馈:伺服电机的编码器可以提供高精度的位置反馈信息,控制器可以根据编码器的反馈信号来调整电机的输出,以实现精确的位置控制。
3.2 速度反馈:伺服电机的控制器可以通过监测电机的转速来实现精确的速度控制。
一般情况下,控制器会将编码器的反馈信号进行差分运算,以获得电机的速度信息。
3.3 加速度反馈:伺服电机的控制器可以通过对速度信号进行积分运算,以获得电机的加速度信息。
通过监测加速度,控制器可以实现精确的加速度控制。
4. 伺服电机的运动控制4.1 位置模式:伺服电机可以通过控制器接收到的位置指令,实现精确的位置控制。
控制器会根据位置误差来调整电机的输出,直到达到设定的位置。
伺服电机结构及工作原理

伺服电机结构及工作原理伺服电机是一种通过电子控制系统使电机输出轴按照特定角度、角速度或位置进行准确定位和控制的电机。
伺服电机的结构和工作原理主要有以下几种类型:直流伺服电机、交流伺服电机和步进伺服电机。
1. 直流伺服电机(DC Servo Motor):直流伺服电机是最早应用于工业领域的伺服电机之一,它由稳压电源、电流放大器、转子、电机驱动装置和编码器等几个组成部分构成。
核心部分是转子,由铁芯和绕组组成。
通常采用碳刷和电刷的机械结构与电机配合,通过交流换向而使转子不断转动。
稳压电源提供恒定的电压和电流供电,电流放大器负责放大电流信号,将其传送到电机驱动装置,驱动电机转动。
编码器负责监测转动过程中的位置,将位置信息反馈给电子控制系统。
2. 交流伺服电机(AC Servo Motor):交流伺服电机采用交流电作为输入信号,其结构和直流伺服电机类似,由转子、定子、电源供电器、电流放大器和编码器等部分组成。
交流伺服电机分为两种类型:感应伺服电机和同步伺服电机。
感应伺服电机是以感应方式工作的,通过变频器和控制器将直流电转换为交流电,使电机能够在不同的转速和转矩下正常工作。
同步伺服电机是通过将交流电直接应用到电机绕组上,有效地提高了转速和转矩的响应速度,并且在精密定位和高速旋转应用中更加稳定和可靠。
3. 步进伺服电机(Stepper Servo Motor):步进伺服电机具有步进电机和伺服电机的结合特点,其特点是具备高精度位置控制和闭环反馈。
步进伺服电机由步进电机、逻辑控制器、编码器、电流放大器和驱动电路等组成。
步进电机通过电脉冲的方式来控制转动步数,逻辑控制器根据位置反馈信号实现闭环控制,编码器监测转动位置,并将信号传输给逻辑控制器。
电流放大器负责放大信号,驱动电路则将细微的控制信号转化成步进电机可以理解的信号。
步进伺服电机适用于许多需要精确控制转动位置的应用,如CNC机床、电子设备、印刷机械等。
伺服电机的工作原理基于反馈控制系统的闭环,通过电子控制系统不断监测输出轴的角度或位置,将反馈信号与目标角度或位置进行比较,并调整控制信号的幅度和相位,实现输出轴的准确定位和控制。
富士伺服电机选型计算资料
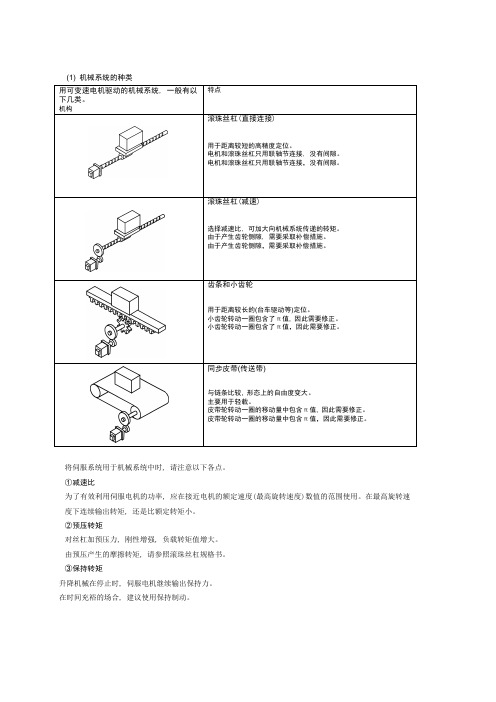
(1) 机械系统的种类特点用可变速电机驱动的机械系统, 一般有以下几类。
机构滚珠丝杠(直接连接)用于距离较短的高精度定位。
电机和滚珠丝杠只用联轴节连接, 没有间隙。
电机和滚珠丝杠只用联轴节连接,没有间隙。
滚珠丝杠(减速)选择减速比, 可加大向机械系统传递的转矩。
由于产生齿轮侧隙, 需要采取补偿措施。
由于产生齿轮侧隙,需要采取补偿措施。
齿条和小齿轮用于距离较长的(台车驱动等)定位。
小齿轮转动一圈包含了π值, 因此需要修正。
小齿轮转动一圈包含了π值,因此需要修正。
同步皮带(传送带)与链条比较, 形态上的自由度变大。
主要用于轻载。
皮带轮转动一圈的移动量中包含π值, 因此需要修正。
皮带轮转动一圈的移动量中包含π值,因此需要修正。
将伺服系统用于机械系统中时, 请注意以下各点。
①减速比为了有效利用伺服电机的功率, 应在接近电机的额定速度(最高旋转速度)数值的范围使用。
在最高旋转速度下连续输出转矩, 还是比额定转矩小。
②预压转矩对丝杠加预压力, 刚性增强, 负载转矩值增大。
由预压产生的摩擦转矩, 请参照滚珠丝杠规格书。
③保持转矩升降机械在停止时, 伺服电机继续输出保持力。
在时间充裕的场合, 建议使用保持制动。
机构特点链条驱动多用于输送线上。
必须考虑链条本身的伸长并采取相应的措施。
在减速比比较大的状态下使用, 机械系统的移动速度小。
多用于输送线上。
必须考虑链条本身的伸长并采取相应的措施。
在减速比比较大的状态下使用,机械系统的移动速度小。
进料辊将板带上的材料夹入辊间送出。
由于未严密确定辊子直径, 在尺寸长的物件上将产生误差, 需进行π补偿。
如果急剧加速, 将产生打滑, 送出量不足。
如果急剧加速,将产生打滑,送出量不足。
转盘分度转盘的惯性矩大, 需要设定足够的减速比。
转盘的转速低, 多使用蜗轮蜗杆。
转盘的转速低,多使用蜗轮蜗杆。
主轴驱动在卷绕线材时, 由于惯性矩大, 需要设定够的减速比。
在等圆周速度控制中, 必须把周边机械考虑进来研究。
伺服电机的工作原理

伺服电机的工作原理伺服电机是一种能够根据控制信号对转速和位置进行精确控制的电机。
它在工业自动化、机器人、数控机床等领域得到广泛应用。
伺服电机的工作原理是通过使用反馈系统来实现动态控制,以精确控制电机的位置和速度。
伺服电机的基本组成部分包括驱动器、电机、编码器和控制器。
驱动器负责接收来自控制器的指令,并根据指令控制电机的转速和位置。
编码器用来感知电机的转角和位置,并将这些信息反馈给控制器,以便实现闭环控制。
控制器根据编码器的反馈信息和控制信号的设定值,计算出驱动器应该输出的电流和电压。
在开环控制方式下,控制器根据设定值(例如转速或位置)生成相应的控制信号,并将该信号发送给驱动器。
驱动器根据控制信号输出相应的电流和电压,电机根据驱动器的输出进行工作。
但是由于无法感知电机的实际转速和位置,开环控制往往存在误差和不稳定性。
而在闭环控制方式下,编码器可以感知电机的转角和位置,并将这些信息反馈给控制器。
控制器通过对比编码器反馈的实际值和设定值,计算出驱动器应该输出的电流和电压,以校正电机的转速和位置。
通过不断进行反馈调整,闭环控制能够实现对电机的精确控制,提高了系统的稳定性和精度。
闭环控制的基本原理是比较电机的实际状态和期望状态,通过控制器计算出驱动器的输出信号,使电机逐渐接近期望状态。
控制器会根据编码器的反馈信息和控制信号的设定值,通过比例、积分和微分等运算,不断调整驱动器的输出电流或电压,以使电机达到期望的转速和位置。
这种反馈迭代的过程能够使电机的运动趋向于稳定,减小误差,并提高控制精度。
在伺服电机的工作中,还会涉及到几个重要的概念,如误差补偿、控制参数和控制模式。
误差补偿是指控制器根据编码器反馈的误差信息,来调整输出信号,减小误差。
控制参数是指根据实际需要对控制器进行调整的参数,例如比例增益、积分时间、微分时间等。
控制模式一般有位置控制模式、速度控制模式和力控制模式等,根据具体应用需求选择合适的模式。
三菱伺服电机选型资料

HC系列伺服电机
型号 电压范围 功率范围
HC1、HC3、HC5、HC7 DC24V、DC48V、DC100V 0.75kW、1.5kW、2.2kW、3.7kW
HC系列伺服电机
扭矩范围
7.5N·m、15N·m、22N·m、37N·m
转速范围
50~3000r/min
精度
±0.01mm
HG系列伺服电机
三菱电机伺服电机是该公司的重要产 品之一,具有高精度、高响应、高稳 定性等优点。
三菱伺服电机的特点和优势
高精度控制
三菱伺服电机采用先进的编码器技术 ,可以实现微米级精度控制,适用于 各种高精度场合。
高稳定性
三菱伺服电机可以适应各种不同的应 用场景,包括水平工作台、三菱伺服电机选型案例分析
案例一:某机械厂设备改造项目
总结词
通过三菱伺服电机的应用,机械厂设备改造项目实现 了生产效率的提升、能耗的降低以及产品质量的改进 。
详细描述
在某机械厂设备改造项目中,三菱伺服电机被用于驱 动各种机械部件,如切削、钻孔、铣削等。通过精确 控制电机转速和扭矩,机械加工的精度和效率得到了 显著提升。同时,由于三菱伺服电机具有高效率和低 能耗的特点,该项目还实现了能耗的降低,为企业节 省了成本。此外,通过使用三菱伺服电机,机械厂还 改进了产品质量,提高了整体竞争力。
05
三菱伺服电机的调试与维护
调试步骤及方法
准备工作
熟悉三菱伺服电机的技术手册和 调试程序,准备好所需的调试工 具和设备。
控制器设置
根据技术手册设置伺服控制器的 参数,包括位置、速度和加速度 等。
电源检查
检查电源是否稳定,电压是否在 规定范围内,电缆连接是否正确 。
伺服电机参数资料

我公司新近开发生产的伺服电机,已形成四个机座系列二十多个品种,广泛应用于数控机床、印刷包装、纺织绣花等精密机械自动化领域。
•特点:1、选用耐高温、高磁能积的优质永磁材料,设计中采用优化的电磁参数,先进的工艺设备生产,使电机长期运行仍保持良好的工作状态;2、用正弦电流驱动,低速特性好;3、电机惯量适中,满足各种场合应用;4、IP65的防护等级,特别适用于工业环境。
•型号命名JWbi代表光电编码器)正弦波驱动电机机座号机座号为:60、90、110、130;另可按客户要求制作80机座电机反馈元件代号:M—光电脉冲编码器。
性能参数代号:前三位表示额定转矩;后两位表示额定转速;如性能参数代号02030表示额定转矩2N・m,额定转速3000rpm。
派生代号:Z—失电制动器。
•60系列伺服电机安装尺寸:60系列额定转矩(N•m) 0.0955 0.159 0.318 0.637 1.27 1.91 LA 85 93 113 96 122 146 LB 20 20 20 31 31 31 LC 1.5 1.5 1.5 3 3 3 LD 8 8 8 7 7 7 LE 38 38 38 50 50 50 LF 60 60 60 60 60 60 LG 66.5 66.5 66.5 70 70 70 LZ 5.5 5.5 5.5 4.5 4.5 4.5 S 8 8 8 14 14 14J I JIIIIII ILnn•60系列伺服电机参数表•80系列伺服电机参数表80伺服电机安装尺寸图:jTii[nnnT Ti|电机型号90ST-M02420 90ST-M02430 90ST-M03520 额定功率(KW)0.5 0.75 0.75额定线电压(V)220 220 220额定线电流(A) 2.0 2.8 3.0额定转速(rpm)2000 3000 2000额定力矩(N.m) 2.4 2.4 3.5峰值力矩(N.m)7.1 7.1 10.5电势系数(Vs/rad)7 7.5 7.5力矩系数(N.m/A)67 44 67转子惯量(Kg.m2) 1.2 1.0 1.2绕组(线间)电阻(Q) 2.45X10-4 2.45X10-4 3.4X10-4绕组(线间)电感5.99 3.5 4.06 (mH)电气时间常数(ms)11.8 7.2 9.7编码器线数(PPR)2500电机绝缘等级ClassB防护等级IP64使用环境环境温度:-20°C--+50C环境湿度:相对湿度<90%(不结霜条件)绕组引线U(红)V(黄)W(蓝)PE电机绕组插座插座编号2 34 1信号引线5V0VA+A-B+B-Z+Z-U+ U-V+V-W+W-PE插座编号131412 34567 8910111215编码器插座蓝绿黄棕亠灰白颜色红黑蓝绿黄棕灰白黑黑黑黑黑黑90型号L90ST-M02420 14990ST-M02430 14990ST-M03520 171LB LA LF注:抱闸为8N.m;DC99V。
伺服电机结构工作原理
伺服电机结构工作原理
伺服电机是一种将输入的电信号转化为旋转或线性运动的电机。
它由三部分组成:电机本体、传感器和控制器。
电机本体是伺服电机的主要执行部件,通常由电磁线圈或永磁体组成。
当通过电信号输入电压到电机本体时,电流通过线圈或永磁体产生电磁场,在磁场的作用下产生力矩,驱动电机旋转或产生线性运动。
传感器用于监测电机的运动状态,并将反馈信号发送给控制器。
最常用的传感器是编码器,它可以测量电机的旋转角度或线性位移,并以脉冲信号的形式输出。
控制器通过读取传感器的反馈信号,可以实时监测和控制电机的运动状态,从而使电机能够按照预定的要求进行精确的控制。
控制器是伺服电机系统的核心部分,它接收来自外部的控制信号,并根据传感器的反馈信号进行处理,产生合适的驱动信号送至电机本体。
控制器内部有一个闭环控制系统,可以根据设定的运动要求和实际的运动状态进行比较,自动调整电机的驱动信号,使电机达到所需的运动精度和稳定性。
总结起来,伺服电机通过将输入的电信号转化为旋转或线性运动,实现精确的位置或速度控制。
其工作原理主要包括电机本体产生力矩、传感器监测运动状态和控制器根据反馈信号调整驱动信号等步骤。
伺服电机特点先进性

伺服电机特点先进性
伺服电机是一种应用于控制系统中的电动机,具有许多先进特点,使其在自动化领域得到广泛应用。
下面将介绍伺服电机的先进特点。
1. 高动态响应特性
伺服电机具有出色的动态响应特性,能够迅速响应控制系统的指令,并实现高精度的位置控制。
这种高动态响应特性使得伺服电机在需要快速、精确控制的应用中表现突出。
2. 高精度位置控制能力
伺服电机通过编码器等反馈装置实时监测转子位置,可以实现极其精准的位置控制。
这种高精度位置控制能力使得伺服电机适用于需要高精度定位和运动控制的场合,如数控机床、印刷设备等。
3. 宽频率范围工作能力
伺服电机具有宽频率范围的工作能力,可以实现高速、高加速度的运动。
这种特点使得伺服电机在高速运动控制、快速反应控制等领域具有独特优势。
4. 自适应控制技术
伺服电机采用先进的自适应控制技术,能够根据负载变化、环境变化等因素自动调整控制参数,保持系统稳定性和性能。
这种自适应控制技术使得伺服电机更加灵活适应各种工作环境。
5. 高效能节能特性
伺服电机的效能通常较高,能够根据需求调节输出功率,在减少能源浪费的同时保证系统性能。
这种高效能节能特性使得伺服电机在节能环保要求日益提高的背景下备受青睐。
以上是伺服电机的几个先进特点,这些特点使得伺服电机在自动化控制领域得到广泛应用,为各种工业生产提供了高效、精准的动力支持。
伺服电机的工作原理

伺服电机的工作原理引言概述:伺服电机是一种能够精准控制位置、速度和加速度的电机,广泛应用于工业自动化、机器人技术、航空航天等领域。
了解伺服电机的工作原理对于掌握其应用和维护至关重要。
一、伺服电机的基本结构1.1 电机部分:伺服电机通常由电机、编码器、控制器和传感器等部分组成。
1.2 编码器:编码器用于反馈电机的位置信息,实现闭环控制。
1.3 控制器:控制器接收编码器反馈的位置信息,并根据设定的目标位置控制电机的转动。
二、伺服电机的工作原理2.1 闭环控制:伺服电机采用闭环控制系统,通过不断比较实际位置和目标位置的差异,调整电机的转速和转向,实现精准控制。
2.2 PID控制:伺服电机控制器通常采用PID控制算法,即比例、积分、微分控制,通过调节这三个参数,实现对电机的精确控制。
2.3 反馈系统:编码器等反馈系统可以实时监测电机的位置信息,将实际位置反馈给控制器,从而实现闭环控制。
三、伺服电机的应用领域3.1 工业自动化:伺服电机广泛应用于自动化生产线上,用于控制机械臂、输送带等设备的运动。
3.2 机器人技术:伺服电机是机器人关节驱动的重要组成部分,可以实现机器人的精准运动和操作。
3.3 航空航天:伺服电机在航空航天领域用于控制飞行器的姿态和航向,保证飞行器的稳定性和精准性。
四、伺服电机的优势4.1 精准控制:伺服电机可以实现高精度的位置控制,适用于对运动精度要求较高的场合。
4.2 高效能:伺服电机具有高效能的特点,能够在短时间内实现快速响应和高速转动。
4.3 稳定性:由于采用闭环控制系统,伺服电机具有良好的稳定性和抗干扰能力,适用于复杂环境下的应用。
五、伺服电机的发展趋势5.1 高性能化:伺服电机将不断追求更高的性能指标,如更高的转速、更高的精度等。
5.2 智能化:伺服电机将逐渐智能化,具备自学习、自适应等功能,更好地适应各种复杂环境。
5.3 网络化:伺服电机将与网络技术结合,实现远程监控、故障诊断等功能,提高设备的可靠性和维护性。
伺服电机的工作原理和结构

伺服电机的工作原理和结构伺服电机是一种精密控制的电机,通过对其工作原理和结构的深入了解,我们可以更好地应用和维护这种电机。
下面将分别介绍伺服电机的工作原理和结构。
一、工作原理伺服电机的工作原理可以简单地概括为将输入信号转换为机械运动的控制器。
当控制器接收到输入信号后,会根据信号的大小和方向来控制电机的转速和位置,从而实现精确的位置控制。
这种闭环控制系统使得伺服电机具有高精度、高速度和高可靠性的特点。
具体来说,伺服电机的工作原理是通过控制系统中的编码器反馈信号来实现闭环控制的。
编码器会不断监测电机的运动状态,并将反馈信号发送回控制器,从而使控制器可以实时调整电机的转速和位置。
这种反馈机制可以有效地减小误差,提高系统的稳定性和精度。
二、结构伺服电机的结构主要包括电机本体、编码器、控制器和驱动器。
电机本体是伺服电机的核心部件,负责将电能转换为机械能。
编码器是用来监测电机运动状态并发送反馈信号的器件,通常采用光电编码器或磁编码器。
控制器是控制整个伺服系统的大脑,负责接收输入信号、处理编码器反馈信号并输出控制信号。
驱动器则是将控制信号转换为电流驱动电机转动的装置。
除了以上主要部件外,伺服电机还包括了传感器、减速器、联轴器等辅助部件。
传感器用来监测环境参数或检测电机状态,以便系统对其进行相应调整。
减速器用来降低电机的转速并提高扭矩,从而使电机可以更好地适应各种工作场景。
联轴器则用来连接电机与负载,传递电机的转动力。
综上所述,伺服电机是一种精密控制的驱动器,通过控制器、编码器和驱动器等部件的协同作用,实现对电机位置和速度的精确控制。
对伺服电机的深入了解可以帮助我们更好地应用和维护这种高性能的电机。
希望以上内容对您有所帮助。
富士伺服电机选型计算资料
富士伺服电机选型计算资料一、关于富士伺服电机的基本资料1. 输出功率(Pout):也就是电机实际输出的功率,通常用单位瓦特(W)表示。
2. 转速(N):电机输出的转速,通常用单位转每分钟(rpm)表示。
3.转矩(T):电机产生的转矩,通常用单位牛顿米(Nm)表示。
4.电压(V):电机工作时所需的电压,通常用单位伏特(V)表示。
5.电流(I):电机工作时所需的电流,通常用单位安培(A)表示。
二、富士伺服电机选型计算方法1.计算输出功率:输出功率(Pout)= 转矩(T)× 转速(N)/ 9550单位:W2.计算所需电流:所需电流(I)= 输出功率(Pout)/ 电压(V)单位:A3.确定电机型号:根据所需输出功率和所需电流,在富士伺服电机的型录中找到适合的型号。
4.考虑额定功率:在选型时,要考虑到电机的额定功率与所需输出功率的关系。
通常情况下,额定功率应大于所需输出功率,以保证电机能够正常工作。
5.考虑载荷惯性:在选型时,要考虑到负载的惯性对电机的影响。
如果负载的惯性较大,需要选择功率较大的电机来满足负载的加速度和减速度要求。
6.考虑工作环境:在选型时,还要考虑工作环境的特殊要求,如温度、湿度、振动等因素。
7.考虑控制系统:在选型时,还要考虑控制系统的要求,如控制精度、速度响应时间等因素。
三、富士伺服电机选型计算示例假设需要选型一台富士伺服电机,输出功率要求为2000W,工作电压为220V,负载惯性为0.03kg·m²,工作环境温度为25℃。
首先计算所需电流:所需电流(I)= 输出功率(Pout)/ 电压(V)所需电流(I)=2000W/220V≈9.09A接下来根据所需输出功率和所需电流,在富士伺服电机的型录中找到适合的型号。
假设找到了型号为MHN309D,额定功率为2200W,额定电流为10A。
然后考虑负载惯性,根据负载惯性为0.03kg·m²,选择合适的电机。
伺服电机样本资料

伺服电机样本资料1. IntroductionServo motors are electrical motors that drive the motion of a machine with precise accuracy. A servomotor is designed for accurate motion control by using feedback loops to adjust its position in response to an external signal. Servomotors are widely used in a range of industries, from robotics and imaging to factory automation and medical applications.Servomotors are available in a variety of sizes and shapes, from the smallest hobby motors to high-power, large-scale industrial models. The type of servomotor needed for a given application depends on the desired motion, the accuracy and speed required, and the amount of torque needed to move the load.2. Types of Servo MotorsDC Servo Motors: DC servo motors are the most popular typeof servomotor. They are typically used in applications that require high speed and low-to-medium torque. DC servomotors are driven by direct current (DC) motors and are typically used in applications that require position or speed control.AC Servo Motors: AC servo motors are the second most popular type of servomotor. They are typically used in applications that require high torque and low speed. AC servomotors are driven byalternating current (AC) motors and are typically used in applications that require loading and unloading force control.Stepper Motors: Stepper motors are the third most popular type of servomotor. They are typically used in applications that require accurate, high-torque motion. Stepper motors are driven by electric pulses, which cause the motor to rotate in a seriesof steps. This type of motor is typically used in applications that require precise positioning and speed control.3. Advantages and Disadvantages of Servo MotorsServomotors offer several advantages over traditional motors, including precise motion control, high power density, low noise operation, and wide speed range. Additionally, servomotors are typically smaller, lighter, and more efficient than traditional motors, making them ideal for applications that require low weight and high performance.However, servomotors also have some limitations. They can be expensive, and require precision control systems to achieve optimum performance. Additionally, servomotors are typically not suited for applications that require high power or speed.4. Applications of Servo MotorsIn machine tooling applications, servomotors are used todrive the precise motion of cutting tools, such as drills and lathes. In robotics applications, servomotors are used to powerrobotic arms and legs. In imaging systems, servomotors are used to control the position and movement of imaging equipment. In factory automation applications, servomotors are used to rapidly move large loads in precise, repeatable motions. In medical applications, servomotors are used to control the movement of medical devices, such as endoscopes and surgical instruments.5. ConclusionServo motors are a type of electrical motor designed for precise, accurate motion control. There are three primary types of servomotors: DC, AC, and stepper motors. Each type of servomotor offers its own advantages and disadvantages, depending on the application. Servomotors are widely used in machine tooling, robotics, imaging systems, factory automation, and medical applications.。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
作者姓名:叶萌专业名称:森林培育指导教师:罗承德论文题目:黄柏剥皮再生机理及其影响因素作者简介:叶萌, 女, 副教授,硕士生导师。
1982年毕业于西南农业大学园艺系,毕业后曾在雅安市农业局、中央农业广播电视学校雅安市分校工作。
现四川农业大学林学园艺学院林学系任教,主要从事经济林、野生植物等教学科研及推广工作。
主持国家“十五”科技攻关项目“医药创新与中药现代化”的子课题“川黄柏规范化种植(GAP)”、校市合作项目“青花椒的开发利用”、四川省林业厅“无公害蕨菜、鲜食枣、竹荪质量技术标准和操作规程”、四川省教育厅“黄柏剥皮再生研究”等项目。
在《核农学报》、《林业科学》等发表文章26篇,其论文主要创新点如下:提出了黄柏剥皮后新皮的再生是高级层次上,结构和组织重新发育的“新建再生(epimorphosis)”;黄柏可以剥皮再生的关键是短期内新生组织可将光合同化物输送到根系,剥皮对黄柏的生理影响是暂时的;确定了影响黄柏剥皮再生的关键因素、重要因素和次要因素,提出了解膜时间的综合指标。
摘要生物的“再生”现象和机制是发育生物学的研究热点。
再生在动物领域已经有了突破性进展,可望在不远的将来对于人类的某些疾病实现“人造器官”的移植,实现保障人类健康、延续人类生命的目的。
植物领域以细胞的全能性理论和组织培养技术顺利克隆出以几何级数增加的植物种类和数量。
广义的剥皮再生包括果树的环剥(0.3~0.5cm)和皮用类林木主干大面积剥皮(>50cm),狭义的剥皮再生指后者。
有关剥皮再生的理论基础研究缺乏,实践应用难度很大,已有报道的树种有杜仲、关黄柏(P. amurense)、厚朴、肉桂等,再生机理的研究主要集中在解剖学方面,探索了新皮的起源,却未能揭示树干大面积剥皮后不死这一核心问题。
因而,研究剥皮再生的机理,对于完善发育生物学中植物再生的相关理论、揭示林木剥皮再生的生命过程具有重要的理论意义。
由于皮用类经济林木生长期长(10~15a),资源利用速度远远大于生长速度,剥皮再生技术对于提高皮类林木的生产力,实现资源的可持续利用,稳定退耕还林成果具有重要的现实意义。
黄柏(Phellodendron chinense)是中国传统的皮用类中药材和提取小檗碱的主要原料,四川的道地药材和乡土树种,已经有2000多年的药用历史,也是传统的出口商品。
黄柏皮为临床常用的清热燥湿的中药,用途广泛,市场需求量大,可制成多种中成药,化妆品、生物农药等,对人民的生活健康具有重要价值。
黄柏也被认为是难以剥皮再生的树种,从2002年至2006年,在四川省黄柏栽培现状调查以及实施规范化种植研究的基础上,针对剥皮再生的理论问题和现实问题,设立四川的荥经、雅安、洪雅、沐川、大邑5县(市)为研究区,以发育生物学为理论指导,黄柏(P. chinense)为供试材料,采用定位观察法、光镜和电镜技术、14C同位素示踪技术、现代光合测定技术、叶绿素荧光动力学技术,HPLC法研究了黄柏剥皮后新皮的形态发生和组织发生过程;剥皮对同化物在树冠的分配以及在新生韧皮部的运输;剥皮对光合特性和叶绿素荧光的影响,剥皮对生长和性能的影响,以及影响黄柏剥皮再生的因素,旨在完善植物再生理论,揭示林木剥皮再生机理,形成剥皮再生技术体系,并应用于生产。
主要研究结果如下。
1、黄柏剥皮再生的形态学和组织发生学(1)黄柏剥皮后包裹透明聚乙烯膜,其外观形态经历如下变化过程:刚剥皮的木质部呈黄白色,光滑而湿润,3~4d表面产生乳白色的愈伤组织,7d左右,愈伤组织逐渐变为浅绿色,并逐渐扩展。
30d表面形成浅褐色膜状栓质层,其下为绿色组织;60~120d,栓质层逐渐增厚,表面粗糙,凹凸不平,形成褐色保护层,其下为绿色活组织。
第2a褐色栓皮增厚,呈块状脱落。
第3a再生皮的颜色、裂纹和厚度和原树皮相似,其分界处不明显。
因此,黄柏剥皮后在包裹的条件下可再生新皮,再生皮的外观形态和原皮相似。
(2)黄柏幼茎和原皮的解剖学特点。
幼茎绿色,近圆形,初生结构由表皮、基本组织和维管束三部分构成,其中表皮无表皮毛和气孔,皮层中有分泌囊(精油腔)和成团的石细胞分布,皮层薄壁细胞中含有叶绿体,维管束为典型的外韧维管束,初生韧皮部中有纤维带和成团的石细胞,木质部有木射线,茎中部为髓;8年生树皮由周皮、挤缩的皮层、失去功能的韧皮部和有功能的韧皮部组成,周皮有7~8层,韧皮部也有7~8条与树木年龄相对应带状纤维束,呈年轮状,在无功能的韧皮部和皮层内有成团的石细胞分布。
(3)黄柏再生皮的组织发生学。
黄柏树皮剥离时大部分形成层细胞随树皮剥离。
木质部外缘为未完全发育成熟的木质部薄壁细胞、导管、管胞及木射线,以及残存的形成层细胞。
3~7d 木射线细胞和木射线之间的未成熟木质部细胞开始分裂形成愈伤组织;15~20d,表层下2~3层细胞转化为木栓形成层细胞;30~60d,在木质部与愈伤组织的结合部位形成具有4~6层细胞的维管形成层区。
新生韧皮部中出现散生的石细胞团和韧皮纤维。
表层下的愈伤组织形成木栓形成层;未成熟木质部细胞恢复分裂能力形成维管形成层;木栓形成层的发生早于维管形成层;3a再生皮和原皮的解剖结构基本相似。
(4)在浅绿色愈伤组织的细胞内有大量叶绿体,叶绿体发育分为三个时期:初期、中期和晚期。
初期叶绿体多集中在细胞质膜处,看不到基粒和片层;中期出现淀粉粒,并开始增大,可见基粒和片层;后期,淀粉粒迅速增大并撑破叶绿体,叶绿体裂解。
黄柏剥皮后在一定条件下可再生新皮。
其新皮的再生经历了新细胞的形成,分生组织的重新建构,由新的木栓形成层和维管形成层分裂形成周皮、次生木质部和次生韧皮部,最后形成新树皮的过程。
其再生不是简单的依靠存留组织的重新分配和构建的“变形再生”,而是在高级层次上的结构和组织重新发育的“新建再生”。
研究结果充实了植物的再生理论;从解剖学角度揭示了剥皮再生的机理。
2、剥皮对黄柏光合特性和14C同化物运输和分配的影响(1)黄柏剥皮后光合速率(P n)显著下降,第15d达到最低水平,蒸腾速率(Tr)在剥后1d迅速下降至最低水平,在第20d都基本恢复至正常水平;叶绿素荧光在暗适应条件下,最大量子效率ΦPO实际量子效率ΦP’和光化学猝灭系数q P。
均在剥后15d达到最低水平,在20d恢复或接近正常水平。
表明剥皮显著降低光合作用和蒸腾作用,但未对光系统Ⅱ造成明显的结构和功能性破坏;剥皮后光合作用在一定时间内下降,其原因是由于剥皮阻断叶片光合产物向下运输,在叶片上积累产生的对光合过程的反馈抑制,一旦光合碳同化物向下运输的功能恢复,反馈抑制随即解除,光合、蒸腾作用迅速恢复到正常水平。
(2)黄柏14C同化物的平均运输速率为50.2 cm/h。
未剥皮黄柏树冠不同部位的功能叶14C同化物分配为:中部功能叶>上部功能叶>下部功能叶;剥皮后,同化物分配规律发生改变:上部功能叶>中部功能叶>下部功能叶。
剥皮后15d,14C同化物经剥皮部位的新生组织向下运输到根系。
研究结果揭示了“树不怕剥皮”的实质,即剥皮虽然暂时降低了黄柏的光合作用,阻断了同化物的下行,改变其在树冠上的分配,但是当剥面长出新组织时,同化物经新生的韧皮部输送到根系,黄柏的光合功能和同化物分配恢复到剥前状态,树体的生命活动自然能够正常进行。
3、剥皮对黄柏生长和性能的影响(1)黄柏2a和3a再生皮与原皮的盐酸小檗碱含量与原皮差异不显著,分别为61.3784mg.g-1,62.6545mg.g-1和61.8816 mg.g-1。
盐酸药根碱含量分别为0.4815 mg.g-1、0.4600 mg.g-1和0.2231 mg.g-1,再生皮含量极显著大于原皮;盐酸巴马汀含量分别为0.1004 mg.g-1、0.0904 mg.g-1和0.1621 mg.g-1,三者差异不显著。
因此,再生皮可作为提取小檗碱的原料和药材。
(2)黄柏剥皮后导致叶片不同程度黄化,落叶提前1个月左右;次年春季萌芽延迟10d左右,仍能正常开花结实;第3a生长即恢复正常。
剥皮后第3a,树皮的厚度依次为3a再生皮>原皮>2a再生皮>1a再生皮。
3a后再生皮厚度极显著大于原皮。
(3)剥皮后新皮的再生是从愈伤组织形成—表面木栓化—形成新周皮和新韧皮部的过程。
在刚剥皮和愈伤组织阶段,任何微小触碰都将造成剥面组织坏死或真菌感染;解膜后至表面木栓层形成期间,易发生新生组织边缘的萎缩或感染。
组织坏死和真菌感染是解膜后愈合率下降的主要原因。
4、影响黄柏剥皮再生的因素影响因素有包扎、剥皮方式、剥皮时间、包膜时间、剥皮强度、剥皮方法、剥皮操作、剥皮天气、树龄、树体状况和生长调节剂共10项。
经统计分析检验,包扎、操作、树干状况、剥皮和包膜时间共5项因素对再生有显著或极显著的影响,据此建立多元线形模型。
至于树龄、剥皮强度和剥皮天气对再生的影响则不显著。
影响剥皮再生的10项因子,根据其重要程度划分为关键因素、重要因素和次要因素。
(1)剥皮再生的关键因素包括包扎、操作、树干状况,其重要性依次为:包扎﹥操作﹥树干状况:薄膜包裹是黄柏剥皮再生的前提;粗放操作是剥皮再生失败的主要因子,也是导致愈合率下降的关键原因;由于树干不平滑使薄膜和树干间有缝隙,造成雨水渗入,节疤处不能形成愈伤组织等等而间接影响剥面的愈合。
(2)重要因素有剥皮和包膜时间,剥皮过早或过迟,包膜时间太短或太长均不利于伤口愈合。
包膜天数和剥皮后的颜色与积温关系密切,气温越高,所需包膜时间越短,反之亦然。
结合季节、物侯和生长发育等多因素,剥皮时间以5月下旬~7月上旬为宜。
若5月下旬~6月上旬剥皮,包膜10~15d,而6月下旬~7月上旬剥皮,则需5~10d。
剥面的浅绿色是解膜的关键形态指标,还应结合该指标确定适宜的包膜时间。
(3)剥皮长度、剥皮天气树龄因素为次要因素,对再生影响不大,可根据市场需要的药材规格以及是否便于剥皮操作,确定剥皮长度;晴天、阴天和微雨天均可剥皮;黄柏的树龄对再生没有影响,从2年生到12年生树均可剥皮。
(4)在包膜的条件下,全剥和纵向留树皮两种方式均能获得好的愈合率,但它们的剥面愈合情况完全不同。
全剥在短时间内愈伤组织覆盖剥面90%以上,以后逐渐下降,树干保持顺直,新皮形态与原皮相似,但受操作和树干状况影响较大。
纵向留树皮剥皮在短时间内愈伤组织覆盖剥面不到50%,以后新皮面积逐渐增加。
由于留树皮保留了运输通道,故剥面愈合受人工操作和树干状况的影响较小,不过此法导致树干和新皮发育畸形。
5、黄柏剥皮再生技术体系剥皮再生技术体系主要包括多点试验和剥皮再生经营措施。
(1)多点试验。
荥经、雅安、洪雅、沐川、大邑5个黄柏主产区的剥皮成活率均在80%以上。
沐川的成活率最高,达88.7%,雅安最低,仅50.0%,造成雅安和沐川黄柏成活率差异的主要原因是管理水平。