日本新型机器人具有人类表情
哈工大暑期机器人课设答辩报告
机器人创新设计与制作课程设计题目车载机械臂四轮小车设计与制作专业机器人工程班号组号 1713402 第4组学生姓名仲帅郑倩陈宇航指导教师刘亚欣答辩日期 2019年7月23日哈尔滨工业大学(威海)课程设计成绩基本信息班号: 1713402 组号: 4 地点: Y315 课程设计时间: 2019 年 7 月 15 日至 7 月 28 日装订顺序页码1、封面2、课程设计成绩Ⅰ3、课程设计任务书Ⅱ4、目录Ⅲ5、正文 16、参考文献7、图纸和程序清单课程设计成绩竞赛排名:成绩:设计分工表学生成绩教师签字: 2019年07月 23日哈尔滨工业大学*********任务书指导教师签字:李哲2019年1月3日第1章绪论1.1课题背景与意义第三次信息技术革命以来,随着微电子、信息、计算机等技术的快速发展,人工智能技术的发展速度越来越快,智能化产品不断进入人们的生活。
中国自1978年把“智能模拟”作为国家科学技术发展规划的主要研究课题,开始着力研究智能。
从概念的引进到实验室研究的实现,再到现在军事、航天航空、勘探等高端领域的应用,为智能化理论的全面发展奠定基石。
人工智能的理论方案、分析方法及特色创新都可以为国内采矿勘探机器人、自动运输机器人、家用自动清洁机器人等自动半自动机器人的设计与普及提供一定的参考。
人类可以利用自己的听觉、视觉、味觉、触觉等功能获取事物的信息,人类的大脑再根据已经掌握的知识对这些信息进行综合分析,从而全面了解认知事物。
这样一个认识事物、分析事物和处理信息的过程称之为信息融合过程。
多传感器信息融合的基本原理就是模仿人类大脑的这个过程,得到一个对复杂对象的一致性解释或结论。
多传感器信息融合是协调多个分布在不同地点,相同或不同种类的传感器所提供的局部不完整观测量信息加以综合,协调使用,消除可能存在的冗余和矛盾,并加以互补,以减少不确定性,得到对物体或环境的一致性描述的过程。
智能小车包含周围环境探测、识别和自动控制等功能的综合系统,以单片机芯片作为其控制核心,由控制器控制其进行相应的动作。
仿人面部表情机器人SHFR-1样机

S RI在 S R 1 HF —. HF 一 机器人 上进行 面部表情 演示 实验 , 果表 明 , 结 该样 机可 以较好地 实现 高兴 、 悲伤 、 惊讶 、 害怕 、 愤
怒 和 厌 恶 等 6种 人 类 基 本 表 情 .
关 键 词 :仿 人 面 部 表 情 机 器 人 ; 部表 情 ; 机 面 样
Absr c :By a ay i g t e f c a e p e so n to ff ca s l s,t e me h n s a d c n r l ta t n l zn h a il x r s in a d mo in o a i lmu ce h c a im n o to s se fa f ca o ta e d sg e y tms o a i lr bo r e i n d.Th c a im n to ft e c re p nd n it a r tt p e me h n s a d moin o h o r s o i g v ru lp o oy e a e a ay e . A a il r b t S r n lz d f c a o o HFR一 i v l p d a e o t r s t f t e nay i . Ex rme t l 1 s de eo e b s d n he e ul o h a l ss s pe i n a
征 , 以根据 人 的 动 作 和 表情 表 达 出 自己 的喜 怒 哀 可 乐, 还能 做 出与人 类 接 近 的 手 势 , 至 是 耸 肩 、 屁 甚 扭 股之 类 的情感 动作 . 在国内, 仿人 面部 表 情 机器 人 的研 究 还 处 于起
韩 等 国开展 仿 人 面部 表 情 机 器 人 的研 究 工 作 较 早 . 日本作 为 机器 人 大 国 , 高 仿 真度 的仿 人 机 器 人 研 在
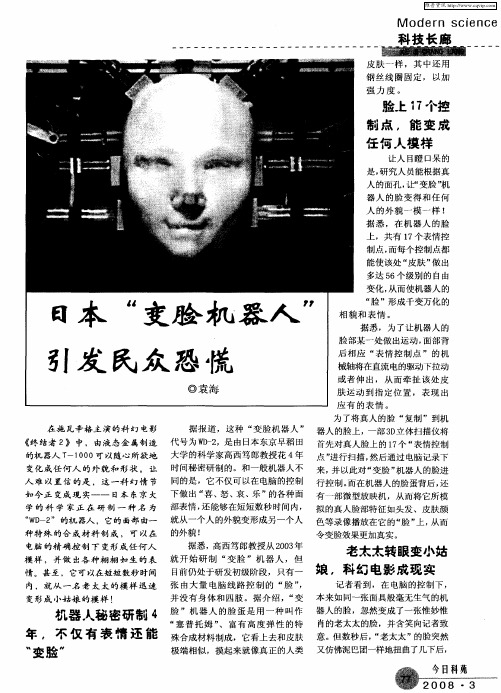
日本“变脸机器人”引发民众恐慌
脸”
静
维普资讯
ode n c e e s i nc r
科 技 长 廊
中 国最 轻 月 球 车 诞 生
◎陈 永 杰
月 球 车 在 进 行 沙 漠 试 验
》中, 由液态金属制造 的机器 所研制的机器人最多只能做 出一些 竟 一 下子 变 成 了一 个 小姑 娘 的模 结者 2 一00 样 !就 在 目瞪 口呆 之 际 ,机 器 人 的 人T 10 可 以随心所欲地变化成任 事先设定 的几种固定表情 ,但未来 不过 , 电影 中机器人变 的机器人在与人类交流时,必须做 脸 又陆续变成 了儿童、 中年男子等 何人 的外貌 。 形过程全部是通过 电脑动画特技完 到 随时进 行细微 的面部表情变化 , 不 同模 样 ,甚 至还 长 出 了胡子 。 从而使它们真正像是一个人 ,而不 但现在 “ 变脸 ” 机器人却让这 这 不可 思 议 的一 幕 无 疑 让 人 联 成 的, 想起施瓦辛格主演的科幻 电影 《 终
的机 器人能拥有和 真人一模一样 的 装 成 人 类 四 处 招摇 撞 骗 ,而 我 们 却 外貌 ,并如同真人一样地 与人类交 毫无察觉 。我想我今后都无法睡觉 流 。高西笃 郎教授解 释 :“ 当人类 了。 另一 网友则戏称 : 我倒是很 ” “ 之 间交流时 ,他们能通过观察对方 想让这种机器人变成安吉丽娜 ・ 朱
面部表情 的细微变化 ,来判断对方 莉的模样 , 然后 与她谈一场恋 爱。 ” 的精神状态 。但 目前,其他科学家
2 案 8 0・ 0
3
} ,它 可 以在 短 短 数秒 时 间 至
老太太转 眼 变小姑
目前仍 处于研 发初级阶段 ,只有一
机器狗

传感器在机器人中的应用——机器狗1机器狗设计所要实现的基本功能宠物机器人在国外已经有了很大的发展,它们有的可以表演,有的具有丰富的情感及表情,有的甚至可以达到和人类交流的目的。
日本SONY公司的“AIBO”、欧姆龙公司的“宠物猫咪”、三协铝业的“海豹机器人”、松下公司的“宠物精灵”都是宠物机器人的代表。
宠物机器人往往搭载了多种传感器,如加速度计、摄像头、听觉传感器、触觉传感器等等。
在国内,具有表情的宠物机器人基本上还处于研究的初级阶段。
本文的研究对象是机器狗,并为它设计了以下三种功能:(1)当你喊它名字的时候,它会发出叫声;(2)当你对它击掌时,它会向你跑来;(3)当你抚摸它的头时,它会翘起尾巴;(4)当你在它的前面一定距离放一个球时,它会走过去并抱住球。
2系统结构示意图3所用传感器以及其在机器狗中的安装位置(1)听觉传感器为了使机器狗对人类所发出的声音能产生所要求的反应,即当叫它名字时会发出叫声,当击掌时会向你跑来,需要机器狗中含有能感知声音的器件即听觉传感器。
听觉传感器是一种能把声音的大小变化转换成电压大小变化的器件,能进行特定语音识别并收到的信号进行处理,使其主控系统能接收到相应的数字信号。
特定人语音识别方法是将事先指定的人的声音中的每一个字音的特征矩阵存储起来,形成一个标准模板(或叫模板),然后再进行匹配。
它首先要记忆一个或几个语音特征,而且被指定人讲话的内容也必须是事先规定好的有限的几句话。
特定人语音识别系统可以识别讲话的人是否是事先指定的人,讲的是哪一句话。
当外部有声音(比如掌声或碰撞声)的时候,主控系统像实际生物狗的大脑一样,进行识别和判断,然后下令给机器狗的各个执行部分。
机器人听觉传感器的声音采集部分由两只型号相同的传声器构成,其安装位置应从小狗形态学出发,置于机器狗的两只耳朵内部,对于两只传感器,第一只是0入射,第二只是180入射,这样,机器人就能够通过不对称的入射条件,来区分左右声源。
仿人情感交互表情机器人研究现状及关键技术
( 上海 大学 机 电工程 与 自动化 学院, 上海 2 0 0 0 7 2 )
摘 要: 仿人情感交互 表情 机器 人作 为当前智 能机器人研究领 域中热 门的研究方 向之一 , 引起 了广泛 的关注 . 为了
更加深入地研究仿人表情机器人 , 对 日本 、 美国、 欧盟和国 内表情机 器人 的一些研 究成果做 了总结 . 分 析了仿 人情感 交互表情 机器人研究 的理论 框架 和关 键技 术. 最后 , 探讨 了未来的发展趋势 , 对今后 的研究方 向提 出了几点看法 . 关键词 : 仿人 ; 情感 ; 表情机器人 ; 机器人 ; 情感交互
s o me o f t h e r e s e a r c h a c h i e v e me n t s r e g a r d i n g t h e c o u n t e n a n c e r o b o t i n J a p a n,t h e US A ,t h e Eu r o p e a n U n i o n a n d
KE Xi a n x i n,S HANG Yu f e n g,L U Ko n g b i
( S c h o o l o f M e c h a n i c a l E n g i n e e r i n g a n d A u t o m a t i o n ,S h a n g h a i U n i v e r s i t y , S h a n g h a i 2 0 0 0 7 2 ,C h i n a )
An a l y s i s o f t h e p r e s e n t r e s e a r c h s t a t us a n d k e y t e c h no l o g y o f
具有面部表情识别与再现的机器人头部系统的研制

a b S T h ao o f i s 在细分网格曲面上 , 出形成填充曲线法刀具路径 的方法 , [] A o ia onS .ahnv ol a ee tnf v —x C 提 4 W.ntpi o,.M kao. o pt gnr i r e ai N
m ci n i at e pc- l g uvs ] n ra oaJu ao ahn g s g dpi aefl r [ .t nt nl orl f i una vs i i c e J I e i n n Pou t n eerh 20 ( ) 6 3 16 . rd ci R sac ,0 54 : 4 — 6 5 o 1 5 周济 , 周艳红. 数控加工技术[ ] M . 国防工业出版社 , 0 ,9 北京: 2 27. 0 径; 在对最小 哈密顿路径求解算法分析基础上 , 细分 网格 图形 [ ] 对 1 j . L e i. e os ut no s c r a t e s[3 v w 6 D i i n h nt c o r t e a p v 两d J. r i . V .s k T c r i ft u d d i u A ee
头部 系统 的研 制 水
李瑞峰 孙中远 王 珂 黄 超 ( 哈尔滨工业大学 机器人技术与系统国家重点实验室, 哈尔滨 10 0 ) 501
Re e r h o h o o e d s s e wi a i I x r s i n s a c f e r b th a y t m t f ca p e so t h e
9 6
李瑞峰等: 具有面部表情识别与再现的机器人 头部 系统的研制
合成机器人要表达的情感。 的运动分为上下 、 左右两个转动 , 图 2b 所示 , 如 () 采用了摆动导 头部舵机通过表情特征控制点拉动面部皮肤的运动单元 , 从而产 杆机构和球铰机构 , 实现左右 、 上下转动的难题 。采用这 两种机
机器人科技知识竞赛答案

机器人科技知识竞赛一、选择题:1中国科技大学在哪一年组建了国内第一支RobotCup仿真足球队。
(C )A 1996B 1991 C1998 D20002、中国在机器人足球国际赛场上金牌零的突破是在哪一年。
(D)A 1995B 1996C 1998D 19993、我国首届机器人足球比赛是在那里举行的。
(A)A 哈尔滨B 北京C 上海D 广州4、我国最早的机器人是在什么时候?(D)A唐朝 B清朝后期 C解放后 D西周时期5、RoboCup是什么意思?(B)A 机器人足球表演赛 B机器人足球世界杯 C 机器人竞技D 机器人舞蹈比赛6、1999年日本索尼公司推出犬型机器人叫什么。
(B)A、 SIBOB、 AIBOC、ASIBOD、 QRIO7、机器人三原则是由谁提出的。
(D)A 森政弘B 约瑟夫·英格伯格C 托莫维奇D 阿西莫夫8、世界上第一台机器人Unimate诞生于那年?(C)A 1955B 1987C 1962D 19639、机器人语言是由(A)表示的"0"和"1"组成的字串机器码。
A二进制B十进制C八进制D十六进制10、机器人的英文单词是(C)A、botreB、boretC、robotD、rebot11、国际上最具影响的和两大世界杯机器人足球赛是什么。
(B)AFsker B RobotCup C FIFA D FLL 12、下面哪几部电影是与机器人有关的。
(C)A《终结者》 B《变形金刚》 C《功夫熊猫》 D 《星球大战》13、机器人能力的评价标准不包括:(C)A智能B机能C动能D物理能14、下列那种机器人不是军用机器人。
(C)A “红隼”无人机B 美国的“大狗”机器人C 索尼公司的AIBO机器狗D “土拨鼠”15、人们实现对机器人的控制不包括什么?(D)A输入B输出C程序D反应16.FMC是(D )的简称。
A.加工中心B.计算机控制系统C.永磁式伺服系统D.柔性制造单元。
全球最先进的机器人
机器人系统在不断发展,并渐渐渗 透进了人类的诸多生活领域内,从制造 业、医学和远程探测技术到娱乐、安全 与私人助理等不一而足。下面的这些图 片是人类制造出的最棒最新的机器人, 它们让我们看到未来……
2010-5-5
By Roger
牙疼机器人Hanako――来自日本的医生和机器人研究人员推出了一款仿人机器人“Hanako”,该机器人可以通 过眨动眼睛、以及像病人那样流口水,甚至可以表达疼痛的表情。而Hanako可作为牙科学生的演练工具,以 及用来测验和评估牙科学生的技能水平。具有女性外形的机器人Hanako面部表情非常丰富,甚至能够开口说 话:“请多多关照。”但是,当牙科学生钻孔时钻的过多、或者钻的地方不对时,Hanako会说:“你碰疼我 了”,然后不断的摇动其塑料材质的头部。而牙科学生会根据机器人的表现来做出修正。
The End
“鹰爪3B”排雷机器人――在2005年4月14日非洲吉布提举行的军事演习中,美国海军 的“鹰爪3B”(Talon 3B)排雷机器人在慢慢靠近一座沙丘上的雷区。第4机动队的海 军爆炸物处理人员利用机器人携带的监控设备和视频设备,可以使它在安全地带活动。
“帕罗”机器人――2008年10月10日,日本产业技术综合研究所研制的用于陪伴老人 和小孩的“帕罗”机器人(Paro),正在横滨举行的2008日本机器人展览会上充电。 这种价值 350000日元(3480美元)的机器人外形像一只幼小的格陵兰海豹,毛皮和胡须 下有一批传感器,可以对听觉、视觉和触觉刺激产生反应,减轻患者遭受的痛苦。
机器“暴龙”――2008年10月23日,矗立在日本东京举行的2008日本数字内容博览 会上两条腿的机器“暴龙”(Tyrannosaurus Rex)。
保安机器人――日本东京工业大学的一名学生在2009年3月3日举行的东京安全展上, 展示了一个保安机器人“bino3”的模型。“bino3”有4只眼,这4只眼分别是2个广角立 体摄像头和2个电传照相立体摄像头,这个机器人能非常平稳地追踪目标或者入侵者。
机器人发展史

➢步进电机 ➢直流电机 ➢交流电机
机器人技术
机器人驱动系统
(2)液压驱动 ➢液压源 ➢驱动器 ➢伺服阀 ➢传感器
机器人技术
机器人驱动系统
(3)气压驱动
➢气压源 ➢驱动器 ➢控制阀 ➢传感器
机器人技术
机器人驱动系统
(4)新型驱动器 (智能材料:具有仿生功能,即材料能根据感受到的信 息而自动判断、控制和调整以适应外界条件变化) ➢静电驱动器 ➢压电驱动器 ➢记忆合金驱动器
现代机器人
1962年 美国AMF公司生产出“VERSTRAN” (意 思是万能搬运), 与Unimation公司生产的 Unimate 一样成为真正商业化的工业机器人,并 出口到世界各国,掀起了全世界对机器人和机器 人研究的热潮。
现代机器人
1962年-1963年 传感器的应用提高了机器人的 可操作性。人们试着在机器人上安装各种各样 的传感器,包括1961年恩斯特采用的触觉传 感器,托莫维奇和博尼1962年在世界上最早 的“灵巧手”上用到了压力传感器,而麦卡锡 1963年则开始在机器人中加入视觉传感系统, 并在1965年,帮助MIT推出了世界上第一个带 有视觉传感器,能识别并定位积木的机器人系 统。
◆中国科学家定义
机器人是一种具有高度灵活性的自动化机器, 这种机器除能动作外,还具备了一些与人或生物 相似的智能,如感知、规划、动作和协同能力。
机器人的发展阶段
第一代机器人
第一代机器人是“可编程机器人”:这种机器人一般可以根据操作人员所编的程序, 完成一些简单的重 复性操作。这一代机器人是从 60 年代后半叶开始投入实际使用的, 目前在工业界已得到广泛应用。 这种机器人不具有外界信息的反馈能力,不能适应环境的变化。
机器人十大品牌

3. 在全球范围内拥有广泛的影响力和用 户群体,被认为是最受欢迎的教育机器 人之一。
2. 提供丰富的教学资源和课程,指导孩 子从基础搭建到编程操控,逐渐提高技 能水平。
详细描述
1. 乐高积木玩具为基础,搭配可编程控 制器和各种传感器,培养孩子的逻辑思 维和创造力。
索尼AIBO
详细描述
2. 内置多种传感器和摄像头,具 备高度智能和自主决策能力,可 随着孩子的成长不断学习和进步 。
总结词
中国领先的工业机器人制造商,在自动化领域有着丰富的经验。
详细描述
新松机器人成立于2000年,总部位于中国沈阳,是中国最大的工业机器人制造商之一,其产品广泛应 用于汽车、电子、食品等行业。新松机器人的工业机器人具有高精度、高稳定性和高可靠性等特点, 同时拥有强大的自主研发能力。
02
CATALOGUE
产品线丰富,包括扫地机器人 、擦窗机器人、空气净化机器 人等,覆盖了家庭清洁的各个 方面。
拥有多项专利技术,如智能路 径规划、遥控控制、语音识别 等,为用户带来便捷的使用体 验。
云鲸智能(Yunji Intelligence)
中国品牌,成立于2016年,专注于家用机器人的研发、生产和销售。
主打产品为洗地机器人和擦窗机器人,在清洁效果和使用体验上有着很高的表现。
。
波士顿动力的机器人不仅具备基本的家务助手功能,还可以执 行更加复杂的任务,如搬运重物、清理环境等。
波士顿动力的机器人具备高度自主性,能够独立完成许多任务 ,减轻了人类的工作负担。
软银Pepper
情感交流
Pepper是一款具有情感交流功能的机器人,能够通过人 工智能技术识别人类的情感,并做出相应的反应,使人类 感受到与机器人的情感交流。
日本人工智能专业介绍及学校推荐

日本人工智能专业介绍及学校推荐现在,随着社会的进步和发展,人工智能(AI)和物联网等新兴技术越来越受到大家的关注,特别是人工智能技术,已经进入了众多制造行业,成为先进制造业中不可替代的重要装备和手段,工业机器人不仅能够帮助企业降低人力成本,更是先进生产力的标志。
据相关统计数据表明,工业机器人主要用于汽车工业及汽车零部件工业,占整个机器人市场的61%,金属制品业占8%、橡胶及塑料工业和电子电气行业分别占7%,食品工业占2%,其他工业占15%。
可以说,人工智能的发展前景非常广阔。
而日本在该领域,一直遥遥领先,众多日本的大学,研究所以及公司都在竞相研发机器人产业,中日两国对相关领域专业人才的需求也非常大。
也因此,日本开设该专业的院校很多,包括了不少世界知名的国公立院校。
大阪大学大阪大学在人工智能方面的实力非常雄厚。
著名的人工智能科学家石黑浩担任大阪大学智能机器人研究所所长,在2014年5月5日,大阪智能机器人研究所研制出一款智能机器人,该机器人外形机器极其逼真,能够完成点头、眨眼等动作,并可以进行简单的交谈。
2010年,日本大阪大学智能机器人学教授石黑浩带领的科研小组开发出可模仿人类表情的女性替身机器人,并于4月3日在大阪市公开展示。
这个名叫“GeminoidTMF”的机器人以一位日本年轻女性为原型,坐着时高140厘米,重量大约为30千克。
在12个控制器的作用下,她可以同步模仿真人的表情。
通过一个表情遥控器,你可以让她时而露齿微笑,时而眉头紧皱。
早稻田大学早稻田大学,可能是中国人最熟知的日本名牌私立大学。
简称早大,是本部设在日本东京都新宿区的私立大学。
与庆应大学并称“日本私立双雄”。
其前身是1882年大隈重信设立的东京专门学校。
一个具有浓厚田园色彩的校名,它是日本最负盛名的大学之一。
1882年伴随着“学问要独立”的宣言声,早稻田大学的前身——东京专门学校诞生在东京郊区的一片稻田里。
而今,早稻田大学已风雨走过132年,发展成为一所完整的综合性大学。
人形机器人概念解读

人形机器人概念解读全文共四篇示例,供读者参考第一篇示例:人形机器人,是一种具有人类外形和特征的机械装置,被设计用来模拟和执行人类的行为。
随着科技的不断发展,人形机器人逐渐成为科幻作品和现实生活中的热门话题。
在科幻小说和电影中,人形机器人常常被描绘为具有独立思考和情感的存在,具有与人类相似的认知和情感能力。
而在现实生活中,人形机器人被广泛应用于工业生产、医疗护理、娱乐等领域,成为人类生活中的得力助手。
人形机器人的概念最早可以追溯到古代神话和传说中的自动人物。
在古希腊神话中,赫菲斯托斯是铁匠之神,他创造了泰坦之神普罗米修斯所偷来的火种的木偶,并娶为妻。
这个故事中的木偶被赋予了生命,并展现出了与人类相似的特征和行为。
古代的机械玩具和自动装置也可以看作是人类对人形机器人概念的初步探索和实践。
随着工业革命的到来,人形机器人开始走进现代科技领域。
20世纪初,捷克作家卡雷尔·恰佩克的科幻小说《罗森戴的机器人》中首次提出了“机器人”一词,并描述了一种由人造材料制成,可以执行人类指令的机械人。
这个概念引发了人们对人形机器人的无限想象和探讨。
此后,人形机器人的研究和开发逐渐成为科技领域的重要课题,许多科研机构和公司投入大量资源和精力进行人形机器人的研究和开发。
人形机器人的概念解读主要涉及以下几个方面:第一,人形机器人的外观和特征。
人形机器人通常具有人类的外形和特征,如头部、身体、四肢等结构。
在外观设计上,人形机器人往往会模仿人类的外貌特征,如面部表情、肢体动作等,以便更好地与人类进行交流和互动。
在材料选择和工艺制造方面,人形机器人往往采用高强度合金、仿生材料等先进材料,结合复杂的机械结构和电子设备,实现人形机器人的外观和功能。
第二,人形机器人的功能和应用。
人形机器人主要用于模仿和执行人类的行为和任务,如工业生产、医疗护理、娱乐等领域。
在工业生产中,人形机器人可以代替人类进行重复性和危险性作业,提高生产效率和产品质量。
机器人展览馆

囊
一
● ● ‘
一 _ .
3 、灵 活 的 纯 白色 机 器 人 ASl M O
日本 :A S I M0的仿 生 设 计 并 不 仅 仅 是 直 立 行 走 ,本
4、具 有 人 类 情 感 的 机 H , &Pe p p e r
日本 :P e p p e r 主打 的功能 是其 具有 人类情感 ,被称 为 “ 全 球首 台具 有人 类情 感的 机 器人 ” , P e p p e r  ̄
别人脸的情绪和表情。 在 巡 逻 街 道 的 时 候 ,机 器 人 将 帮 助 警 方 找 到 违 规 人 员
8、ABB联 手 I r i s b o n d 发 明 眼 控 机 器 人 ,让 瘫 痪 病 人 用 眼 睛 下 棋
工 业 机 器 人 四 大 家 族 之 一 瑞 士AB B 联 手 西班 牙 眼 动 追 踪 软 件 开 发 商 I r i s b o n d ,
负 责 城 市 安全 。 机 器 人 凭 借 安 置 的 导 航 系 统 能 够 辨 别 方 向 ,用 6 种 语 言 交 流 , 包 括 英 语 和 阿 拉 伯 语 , 通 过 它 还 可 以 向 居 民提 供 警 方相 关 的 缴 费 服 务 。
检测装置” ,能分辨1 . 5 米 内的动作和手势 ,同时还可 以辨
2、步 履 轻 快 的机 器 狗 Sp o t
美 国 : 机 器 人 步 幅 很 小 , 每 一 次 落 脚 都 在 调 整 着
整 体的平衡 ,行 进速度也能 够令人接 受。大狗 机器人 的平衡性 非常 出色,测试人 员在它 的体侧踢踹 都不能
j g - , - 它 踢倒 。
,
ቤተ መጻሕፍቲ ባይዱd l , ●
一种仿人表情机器人面部器官机构[发明专利]
![一种仿人表情机器人面部器官机构[发明专利]](https://img.taocdn.com/s3/m/2b1f42a8be1e650e53ea9900.png)
专利名称:一种仿人表情机器人面部器官机构专利类型:发明专利
发明人:骆敏舟,赵鸣晖,柏永华,庞风麟,徐孝彬申请号:CN202010169291.2
申请日:20200312
公开号:CN111300449A
公开日:
20200619
专利内容由知识产权出版社提供
摘要:本发明提供了一种仿人表情机器人面部器官机构,包括眼部运动机构,嘴部运动机构与基座。
所述眼部运动机构分为眼球运动机构和眼睑机构,眼球运动机构采用球铰接与平行四连杆结构,可以实现眼球上下左右耦合转动,眼睑机构采用摆动导杆机构,可实现机器人眨眼动作;所述嘴部运动机构采用正齿轮传动,利用其啮合特性,并实现嘴巴开合运动。
基座可与机器人身体相连接,眼部运动机构、嘴部运动机构与基座固定连接,从而实现仿人表情机器人的面部器官动作。
该面部器官机构设计紧凑,可以在头部狭小空间动作且运动灵活,可真实地模仿人类的眼球转动、眨眼与嘴巴开合动作。
申请人:河海大学常州校区
地址:213022 江苏省常州市新北区晋陵北路200号
国籍:CN
代理机构:南京经纬专利商标代理有限公司
代理人:丁涛
更多信息请下载全文后查看。
被严重误导的“情感计算”

被严重误导的“情感计算”一、前言目前,人工智能呈现高速增长和全面扩张的态势,一方面人工智能不断朝更深层的智能方向发展:数学运算、逻辑推理、专家系统、模式识别、深度学习等;另一方面不断向社会的各个领域进行扩展:智能电视、智能手机、智能家居、智能交通、智能购物、智能城市、智能养老等。
人工智能的下一个技术突破口必然是人工情感,只有实现了真正意义的人工情感,人工智能才会有更加广阔的发展空间,才会对社会生产力形成更加强大的推动力。
然而,当今的计算机从原理上讲主要是基于逻辑推理式系统,根本不存在任何情感能力,人工智能也只是逻辑推理能力的体现。
让计算机和机器人具有人类式的情感,是许多科学家的梦想。
与人工智能技术的高度发展相比,人工情感技术所取得的进展却是微乎其微,“情感”始终是横跨在人脑与电脑之间无法愈越的鸿沟。
“情感计算”的概念是在1997年由MIT媒体实验室Picard教授提出,从而在世界范围内拉开了人工智能走向人工情感的序幕,激发出人们对于人工情感研究的强大兴趣。
然而,这一理论存在着严重的缺陷,并把人们引向一个重大误区,致使“情感计算”研究在一阵短暂的繁荣之后,紧接着出现了长达十多年的沉寂。
二、情感计算简介对人的情感和认知的研究是人工智能的高级阶段,它的研究将会大大促进拟人控制理论、情感机器人、人性化的商品设计和市场开发等方面的进展,为最终营造一个人与人、人与机器和谐的社会环境做出贡献。
1.美国的情感计算美国MIT媒体实验室Picard教授提出“情感计算”一词并给出了定义,即情感计算是关于情感、情感产生以及影响情感方面的计算。
最近,美国加州Abyss Creations公司近日宣布,第一代性爱女机器人Harmony已经成功研发出来,它具有学习能力,并且能与人类进行情感交流。
2.欧盟的情绪机器欧盟国家也在积极地对情感信息处理技术(表情识别、情感信息测量、可穿戴计算等)进行研究。
欧洲许多大学成立了情感与智能关系的研究小组。
ASIMO

诞生于1993~1997年的P1/2/3,可以说是成了真正意义上的机器“人”,因为,严格来说,在P1之前的E系 列,只能算是机械腿,到了P1才是真正地加入了上身,模拟人类全身运动的机器人。他可是个超大个儿,身高 1.9米,体重175千克。电源和控制计算机都是放在主体之外,可以实现开关门、抓东西搬运等动作。
机器人简介
本田的ASIMO机器人ASIMO身高1.3米,体重48公斤。它的行走速度是0-9km/h。早期的机器人如果直线行走 时突然转向,必须先停下来,看起来比较笨拙。而ASIMO就灵活得多,它可以实时预测下一个动作并提前改变重 心,因此可以行走自如,进行诸如“8”字形行走、下台阶、弯腰等各项“复杂”动作。此外,ASIMO还可以握手、 挥手,甚至可以随着音乐翩翩起舞。
ASIMO
仿人机器人
目录
机器人简介
03 功能
02 技术参数 04 进化史
05 身体结构
07 新技术
目录
06 动作原理
ASIMO(日本语:アシモ,罗马音:Ashimo,中文:阿西莫),日本本田技研工业株式会社研制的仿人机器 人。这款机器人模仿人类的动作更精准,以达到帮助人类,特别是行动不便者的设计目的。
ASIMO装载的大量传感器,既包括传统人类的传感器,也拥有一些超越人类的特殊感应器,能够迅速地了解 周围情况,在复杂的环境下也能快速顺畅地移动。
●视觉感应器:其眼部摄影机通过连续拍摄图片,再与数据库内容作比较,以轮廓的特征识别人类及辨别来 者身份;
●水平感应器:由红外线感应器和CCD摄像机构成的sensymg系统共同工作,可避开障碍物。
ASIMO机器人

ASIMO尊敬的读者,欢迎阅读ASIMO文档。
该文档旨在提供ASIMO的全面介绍和技术细节。
在本文档中,将详细描述ASIMO的功能、特点、应用领域和技术原理。
请您仔细阅读以下章节。
一、简介ASIMO是由本田公司开发的一款先进的人形。
它具备人类样式的外观和四肢运动能力,被设计用于协助人类完成各种任务。
ASIMO 是近年来和机械工程领域的重要突破,其先进的技术使得它成为了全球广泛关注的焦点之一。
二、功能和特点ASIMO具备多种功能和特点,包括但不限于以下方面:1:动态稳态能力:ASIMO具备优秀的运动平衡能力,可以保持稳定的姿势并进行各种动作。
2:探索和导航能力:ASIMO可以在复杂的环境中自主行动,识别并避开障碍物。
3:人机协作能力:ASIMO能够识别人类的语音指令、手势和表情,并进行相应的反应和互动。
4:操作和操控能力:ASIMO可以使用其机械臂和手指完成各种操作,如拿取物体、开关电器等。
5:社交能力:ASIMO可以与人类进行交流和互动,具备一定的情感表达和社交技巧。
三、应用领域ASIMO已经在多个领域得到了应用,主要包括但不限于以下方面:1:服务领域:ASIMO可以在医院、酒店、机场等场所提供各种服务,如导引客人、搬运物品等。
2:教育领域:ASIMO可以在学校和教育机构中担任教学助理,辅助教师进行课堂教学和互动。
3:研究领域:ASIMO被广泛应用于科学研究领域,例如人机交互研究、人类行为模拟等。
4:娱乐领域:ASIMO可以在主题公园和娱乐场所中进行表演和互动,给人们带来欢乐和惊喜。
四、技术原理ASIMO的实现涉及多个技术领域,包括但不限于:1:传感器技术:ASIMO配备了多种传感器,包括摄像头、声音传感器等,用于感知周围环境和识别人类指令。
2:运动控制技术:ASIMO通过精确的运动控制算法和多个关节实现灵活的运动和动作。
3:语音和图像识别技术:ASIMO可以识别人类的语音指令和面部表情,通过自然语言处理和计算机视觉技术实现交互。
机器人技术的发展特征

机器人技术的发展特征机器人技术的发展特征机器人技术是一项高科技的综合应用技术, 在工业生产、服务行业等各个领域都得到了广泛的应用。
近年来,随着科技的不断进步和人们对智能化生产需求的增加,机器人技术正在经历着飞速的发展。
下面笔者将从机器人自主性、智能化、多功能、人性化等几个角度来总结机器人技术发展的特征。
首先,机器人自主性是机器人技术发展的重要特征之一。
过去的机器人主要是受控制于人类操作,缺乏自主性。
而随着人工智能技术的进步,现代机器人在一定程度上具备了自主决策能力。
例如,一些智能机器人可以根据环境变化自主调整工作方式,克服障碍,在没有人类干预的情况下完成复杂任务。
自主性的提升使得机器人能够更独立地参与到生产中,提高了生产效率和质量。
其次,机器人技术的智能化也是其发展的重要特征。
传统的机器人技术主要是基于预设的程序或者简单的传感器反馈实现动作,缺乏较高的智能水平。
而如今,机器人技术借助于人工智能技术,能够模拟人类的智能思维,实现更高级的智能行为。
例如,一些机器人可以通过图像识别技术自主识别和辨别物体,通过学习算法实现自适应、自我优化。
这种智能化特征为机器人赋予了更高的学习能力和适应性,使其能够更好地适应复杂多变的环境。
此外,机器人技术的多功能性也是其一个显著的发展特征。
过去的机器人主要有单一功能,只能完成特定的任务。
而现代机器人技术则可以具备多种功能,同时完成多个任务。
例如,一些工业机器人可以在同一个工作站上进行多种操作,完成装配、焊接、喷涂等多种工艺。
多功能性的提升使得机器人在生产过程中的应用更加灵活,提高了生产效率和灵活性。
最后,机器人技术的人性化特征也逐渐显现。
过去的机器人通常是机械化的外形,缺乏与人类的交互界面。
而现代机器人技术则更加注重人机交互体验。
例如,一些服务机器人可以通过语音识别和语音合成技术与人类进行语音交流,提供信息咨询、指导等服务。
另外,一些机器人外形也变得更加像人类,他们可以模仿人类的表情、动作,与人类进行更加亲近的交流。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
日本新型机器人具有人类表情
Kobian, a "humanoid" robot, which can express seven human emotions, has been unveiled by researchers at Waseda University in Japan.
The Emotional Humanoid Robot can express seven different feelings, including delight, surprise, sadness and dislike. In addition to assuming different poses to match the mood, Kobian uses motors in its face to move its lips, eyelids and eyebrows into various positions.
To express delight, for example, the robot put its hands over its head and opens its mouth and eyes wide.
To show sadness, Kobian hunches over, hangs its head and holds a hand up to its face in a gesture of grief.
Kobian can also walk around, perceive its environment and perform physical tasks. The robot features a double jointed neck that helps it achieve more expressive postures.
It was developed and unveiled by researchers at Waseda’s Graduate School of Advanced Science and Engineering in Tokyo on Tuesday June 23.
They were led by Professor Atsuo Takanashi, and worked with robot manufacturer Tmsuk, based in Kitakyushu, southern Japan.
According to Kobian’s developers, the robot’s expressiveness makes it more equipped to interact with humans and assist with daily activities.
There are plans for it to be further developed and then possibly deployed into the field of nursing.
日本早稻田大学的研究人员日前研制出一款“人性”机器人,可以表达七种人类情感。
这台“人类情感机器人”可以表达七种不同的感情,包括喜悦、惊讶、悲伤和厌恶。
除了能摆出不同的姿态来表达感情外,机器人Kobian的面部还安装了电动机,调动嘴唇、眼皮和眉毛呈现出各种各样的神态。
例如,为了表达喜悦,机器人会将手举过头顶,并且睁大眼睛咧开嘴笑。
为了表达悲伤,Kobian会弯腰低头,用一只手捂住脸,作悲伤状。
Kobian还可以四处行走,感知周围环境,此外还能做些“体力活”。
这台机器人脖颈处有双接缝,有助于他表达更多情感。
这台机器人由日本早稻田大学尖端科技研究院开发,于本周二(6月23日)面世。
Atsuo Takanashi教授是研究负责人,日本南部北九州市机器人生产商Tmsuk 公司也参与了研制。
Kobian的研发人员称,机器人的表情可以使它更协调地与人互动,并帮人们做些活。
研究人员计划进一步开展研发工作,之后有可能将它应用于护理领域。
Vocabulary:
humanoid: having human characteristics or form; resembling human beings (有人的特点的)。