基于DSP和FPGA的电视跟踪系统设计
基于FPGA+DSP的高速视频实时处理系统设计

1310 引言随着经济的快速发展,各个领域对高速视频图像实时处理的速度与精度提出了更高的要求,譬如:机器人导航领域、现场监控领域、安防领域等。
在此背景下,高速视频图像实时处理技术得到了长足的发展[1]。
20世纪70年代,人们开始利用高速摄像机来记录运动的物体,但当时高速摄像机是以胶片的形式作为记录介质,无法实现数据的实时处理[2]。
现如今,高速工业相机的采样频率高达1000FPS (Frame Per Second)[3],由于高速视频图像实时处理系统具有数据量大,数据相关性高,而且对图像的帧、场时间具有严格的限制,因此,高速视频图像实时处理领域对中央处理芯片、外部存储芯片的工作速率以及核心算法的运算复杂度等都提出了极大的挑战[4]。
1 系统设计如图1所示,高速视频实时处理系统采用Xilinx公司的K7系列FPGA芯片作为核心控制器,采用TI公司TMS320 C6455作为图形处理器。
通过Camera Link总线接收高速视频数据,并将视频数据缓存在由4片DDR3-SDRAM构造64位宽的外部动态存储器内,同时根据接收视频的帧位置向DSP发送中断。
DSP根据中断信息通过DMA的方式从DDR3中读取视频数据进行实时跟踪处理。
并将跟踪波门信息反馈给FPGA。
FPGA利用视频叠加技术将波门叠加在输出的VGA视频中实时显示。
1.1 高速视频输入高速视频采用Camera Link Full接口输入,视频分辨率1280×1024、位宽8bit、帧频520f/s。
Camera Link标准由数家工业级相机及采集卡制造商共同制定,该接口具有通用性,标准规定了引脚分配及相应的接插件规范,能够确保兼容设备的接口实现无缝连接。
Camera Link标准基于Channel Link技术,在传统LVDS (Low Voltage Differential Signaling)传输数据的基础上加载了并转串发送器和串转并接收器,利用SER DES技收稿日期:2021-03-08作者简介:张小永(1987—),男,满族,北京人,本科,研究方向:数字图像处理技术。
基于FPGA_DSP的高清视频图像系统设计与实现_高杨

测试系统与模块化组件 电 子 测 量 技 术 ELEC TRON IC M EAS UREM EN T TECH NO LOGY 第34卷第1期2011年1月 基于FPGA+DSP的高清视频图像系统设计与实现高 杨 刘荣科 胡 伟(北京航空航天大学电子信息工程学院北京100191)摘 要:无人机在侦察、测绘等领域对图像分辨率的要求不断提高,随之带来了数据量的显著增大,其次,视频图像系统与传统遥控遥测系统的融合也是设计中需要考虑的。
针对以上问题,设计并实现了一种基于F PGA+DSP的机载高清视频图像系统,包括机载设备端和地面站端两部分,最高支持分辨率为1280×720,每秒25帧的M PEG-4实时视频编解码,平均码速率在5M bps以下。
图像分辨率和视频码率可通过上行遥控指令动态切换。
视频数据与遥测数据实现了组帧传输。
设备体积小、功耗低、可靠性高,成功完成了挂飞实验。
关键词:M PEG-4;高清视频;遥控;遥测;FPG A;DSP中图分类号:V243.5 文献标识码:ADesign and implementation of high definition videoimage system based on FPGA+DSPG ao Y ang L iu Rong ke H u Wei(Beijing University of Aeronautics and A stronau tics Electronic and Information Engineering Ins tiiu te,Beijing100191)A bstract:T he requirements o f video imag e reso lution is eve r increa sing in the UA V reco nnaissance,mapping and other fields,w hich bring a significant amount of data increa se.In additio n,the integ ratio n of video imaging sy stem and traditio nal telecontr ol and telemetering sy stem is r equired in sy stem design consider atio n.T o solve the pr oblems abo ve, w e de sig n and implement an air bo rne hig h definitio n video image system based on F PG A+DSP,including tw o pa rts: airbo rne equipment end and g round statio n end,it suppor ted the maximum re so lutio n o f1280×720,25fr ame s per second in M PEG-4real-time video encoding and deco ding w ith the ave rage code ra te below5M bps.Imag e re so lutio n a nd video code ra te can be switched up by teleco mma nd dy namically.T he video data and telemetry data are transmitted in the same f rame.T he equipment w ith sma ll size,low pow er consumptio n,hig h re liability,successfully co mpleted flight e xperiments.Keywords:M PEG-4;hig h definition video;telecontro l;telemetering;FPG A;DSP0 引 言无人机广泛应用于军事侦察以及民用测绘等领域,其中的机载视频图像系统是机载电子系统中的重要环节之一。
一种基于DSP+FPGA的目标跟踪系统设计
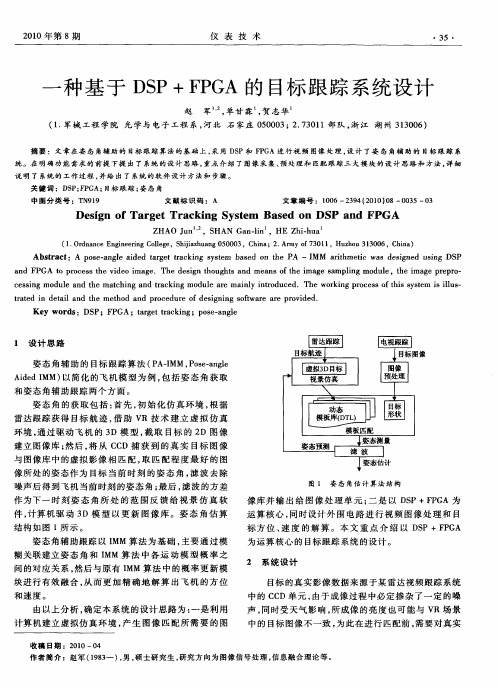
雷达 跟踪 获得 目标 航 迹 , 助 V 技术 建 立 虚 拟仿 真 借 R
环境 , 过驱动 飞 机 的 3 通 D模 型 , 取 目标 的 2 图像 截 D 建立 图像 库 ; 后 , 从 C D捕 获 到 的 真 实 目标 图像 然 将 C
与 图像库 中的虚拟 影像 相 匹 配 , 匹配 程 度 最 好 的 图 取
为运 算 核心 的 目标 跟踪 系统 的设 计 。 2 系统 设计
姿态 角辅助 跟踪 以 I 算 法 为基 础 , MM 主要 通 过模 糊关 联建立 姿 态 角 和 I 算 法 中各运 动模 型 概 率 之 MM 间 的对应 关系 , 然后 与原 有 I 算 法 中 的概 率更 新模 MM 块进行 有效 融合 , 而 更 加 精确 地 解 算 出飞 机 的 方位 从
21 0 0年第 8期
仪 表 技 术
・ 5・ 3
一
种 基 于 D P+F G 的 目标 跟 踪 系 统 设 计 S PA
赵 军 , 单甘 霖 贺 志华 ,
(. 1 军械 工程 学院 光 学与 电子 工程 系 , 北 石 家庄 0 0 0 ; .3 1 部 队 , 江 湖 州 3 3 0 ) 河 5 03 270 1 浙 1 0 6
tae n d ti a d t e m eh d a d prc d r fd sg i g s f r r o i e r td i ea l n h t o n o e u e o e in n o t e a e pr vd d. wa
K e o ds:DS yw r P; F PGA ;t r e r c i a g tta kng;p s — n l o e a ge
结构 如 图 1所示 。
基于DSP与FPGA的视频跟踪系统设计

基于DSP与FPGA的视频跟踪系统设计陈正纲, 袁晓辉(东南大学自动化学院,江苏 南京 210096)摘要:本文利用TI公司的TMS320VC33的浮点数据处理能力并结合FPGA的集成电路硬件逻辑编程功能,设计了一套实现视频采集、视频处理、目标选取与跟踪的视频跟踪系统。
针对视频跟踪系统的功能和性能要求,本文从系统的功能要求、设计思路、结构组成及设计结果等方面详细叙述硬件设计过程。
并提出了基于TMS320VC33的一种快速目标跟踪算法。
关键词:数字信号处理器,视频跟踪另0 引言视频跟踪系统作为一种无源跟踪装备,其突出特点是隐蔽性好,可以实现高分辨率成像,跟踪精度较高,而且结构较红外和激光跟踪简单,可靠性高,这使得视频跟踪系统在火控系统、导弹制导、靶场跟踪测量和战场侦察等军事领域得到广泛应用。
视频跟踪技术的发展大体划分为三个阶段:到70年代中期为单元技术研制阶段,主要是攻克关键技术;从70年代中期到80年代初为系统集成阶段,电视跟踪系统在我国靶场得到应用;到80年代末期,随着军工发展的需要,电视跟踪技术得到了很大发展并逐渐成熟。
进入21世纪,随着高性能摄像设备与高速数据处理器的出现,视频目标跟踪系统正向着高速化、高集成化、网络化、智能化方向转变。
视频跟踪系统也开始向更广阔的领域发展。
视频监控设备因安全需求而被广泛使用于银行、商店、停车场等。
目前,带有自动目标监测、识别、跟踪的智能监控系统成为研究的热门。
而研制以视频系统作为感知接口的智能机器人也是各个国家展示科技实力的平台。
日本本田公司的双足机器人可以在机器视觉以及相关处理系统的帮助下登楼梯与跨越障碍物。
美国将视频跟踪系统应用于无人侦察机等智能武器装备上,大大减少了人员的工作量,不仅如此,无人侦察机通过视频图像的处理、识别,能够根据目标特征判断目标类别并采取自主攻击行为,将现代战争带入到智能化、无人化阶段。
1 课题背景与设计思路图1 视频跟踪系统整体结构图本文研究的视频跟踪系统为国防巡逻艇艇载目标跟踪装置的子系统。
基于DSP+FPGA的实时视频采集系统设计
基于DSP+FPGA的实时视频采集系统设计。
据学者统计,人类所得的信息有80%以上是来自眼睛摄取的图像。
而事实上,这种静态的图像已无法满足人们对视频信息的要求。
随着人们对视频数据的要求越来越高,高清晰、实时性视频数据量越来越大,视频的实时处理难度也在逐渐增大。
本文给出了一款基于DSP+FPGA 的嵌入式实时视频采集系统的设计方法,该系统可以广泛应用于关系公共安全的场所,如银行、机场、车站、商场等。
1 实时视频采集系统结构常见的视频采集系统主要有两种:一种是基于单处理器(单片机、ARM 等)的视频采集卡,特点是结构简单,易于实现,缺点是无法实时地对视频数据完成处理,需要使用外部处理器来完成特定的视频处理算法,因而成本高,升级维护难度大;另一种是基于主从处理器(ARM+DSP,FPGA+DSP 等)的嵌入式视频采集卡,特点是系统高度集成,易于维护升级,可以满足视频采集的需求,同时可以完成特定的视频算法,成本较低。
因此,本文给出了一种基于DSP+FPGA 的嵌入式视频采集系统设计方案。
其系统结构框图如图1 所示。
2 系统硬件设计本系统的设计思路是通过模拟的视频摄像头来获取视频信号,然后采用模数转换芯片SAA71 11A 将模拟的PAL 制式视频信号转换为YUV4:2:2 的数字视频信号。
设计使用FPGA 芯片EP1C6Q240C8 作为协处理器,来完成视频信号的缓存和视频帧的合成,通过双RAM 的乒乓结构来实现视频帧的完整性,并在完成视频数据的预处理后,将视频数据传入到DSP 中,完成特定的视频处理算法(如压缩等),最后对处理完的视频数据进行传输和存储。
同时,主处理器DSP 还负责对视频采集芯片进行初始化配置。
其系统硬件。
基于FPGA+DSP的高清视频监控系统研究
基于FPGA+DSP的高清视频监控系统探究摘要:随着科技的不息进步和进步,高清视频监控系统在安防领域得到了广泛应用。
本文将详尽探究基于FPGA+DSP的高清视频监控系统,并从硬件设计、软件算法以及系统性能方面进行分析和探讨。
通过试验验证,本文所提出的基于FPGA+DSP的高清视频监控系统在图像质量和处理性能上具有巨大优势,能够有效应对日益复杂的安防需求。
关键词:高清视频;监控系统;FPGA;DSP第一章引言1.1 探究背景随着社会的不息进步和人们对安全的日益重视,高清视频监控系统在城市安防和企事业单位的安全管理中起到了至关重要的作用。
高清视频监控系统通过实时采集和传输高清视频图像,能够对潜在的安全隐患进行准时发现和处理,为各行业提供有效的安全保障。
1.2 探究意义目前市场上的高清视频监控系统主要基于开发板或者成熟的硬件平台,但是这些系统存在着处理速度慢、图像质量差、占用存储空间大等问题。
因此,本文旨在探究并设计一种基于FPGA+DSP的高清视频监控系统,通过硬件和软件的协作,提高系统的处理速度和图像质量,以满足复杂的安防需求。
第二章系统设计方法2.1 硬件设计本系统基于FPGA+DSP实现,接受了高性能的FPGA芯片和DSP 芯片。
FPGA用于图像数据的采集、处理和传输,DSP用于复杂算法的运行和图像质量的优化。
通过硬件设计,实现对高清视频的高速处理和传输,提高系统的实时性和稳定性。
2.2 软件算法本系统接受了图像增强算法、目标检测算法和运动跟踪算法等。
图像增强算法通过增加对比度和锐化处理,提升图像的明晰度和细节;目标检测算法通过特征提取和分类器的运用,实现对目标物体的准确检测;运动跟踪算法通过连续帧的比对和匹配,实现对目标物体的精确跟踪。
第三章系统性能评估为了评估所设计的基于FPGA+DSP的高清视频监控系统的性能,本文进行了多组试验,并从图像质量、处理速度和系统资源占用等方面进行了分析和评估。
基于FPGA的电视跟踪系统目标模拟器设计

基于FPGA的电视跟踪系统目标模拟器设计刘杰,等基于FPGA的电视跟踪系统目标模拟器设计DesignofTargetSimulatorBasedonFPGAforTVTrackingSystem纠左1牛蒸铭1,2量伟1纠佳榜1(解放军军械工程学院1,河北石家庄050003;清华大学精密仪器测试技术与仪器国家重点实验室2,北京100084)摘要:电子目标模拟器已广泛应用在电视跟踪系统的性能检测中。
介绍了一种新型的电视跟踪系统目标模拟器,该模拟器的硬件平台由UsB模块、FPGA模块和视频D/A模块搭建而成。
在此硬件平台基础上,通过编写verilog硬件描述语言仿真并模拟出满足被测电视跟踪系统测试需求的模拟目标图像。
重点讨论了静、动态模拟目标的生成及其在性能指标测试中的应用。
该目标模拟器集成度高、扩展功能强。
关键词:目标模拟器电视跟踪系统FPGA视频信号隔行扫描模拟目标跟踪性能中图分类号:’I玛34.2文献标志码:AAbs嘣:Elec“ctarget8i咖llatorh鹊been试dely印pliedinpe面rm舳cete8tofT ̄r协lckiIlgsyste脚.A鹏wtargetsimuhtori8in咄ced.1tshardw眦pl幽皿co商s协ofusB,FPGA鲫dvideomodule8.0Il缸basi8of山ishafdw呲ph如皿,nleeml岫ed吨etim啦枷8fy她tlIe耻ed80fTVn批kiIlgsystem岫dert髑tiBB血uhtedtll】舢gIlpm盯咖jIlgVeriloghardwa"de∞riPtionlaIlgIlage.111ege鹏mti∞ofs洒caIlddy咖icsimlIlatedtarget肌d山eapplic“onoftlIetargetintestingperfb珊衄ceindexa陀diBc哪demphticauy.Thetargetsim山torfeatu瑚higllintegTation如dexp阻dabil崎.Ke”mrds:1kgetsim山t∞’rv昀ckiIIgsystemFPGAVideoBignalIIItedaced8c柚SiⅡl山tedtⅢgetTrackiIlgpe而m∞ce0引言为了测试和评价电视跟踪系统的静态和动态性能,需要测试者提供一套目标模拟系统。
基于DSP和FPGA的视频处理系统设计及其实现
第 3 卷 第 1 期 7 2
20 07年 1 2月
激 光 与 红 外
I E AS R & I R NF ARE D
Vo . 7, .1 1 3 No 2
De e e , 0 7 c mb r 2 0
文章编号 :0 15 7 (0 7 1 -380 10 -0 8 20 ) 212 -3
De i n a d Re l a in o d o- o e sn y t m sg n ai to fVi e pr c si g S se z Ba e n DS a d FPGA s d o P n
L U a — i g , AN h , I Xio r n TI u Ya XU ha . i Z o hu
路: 一种是由计算机和视频采集卡组成 , 主要采用以 计算机为核心的集 中式处理 , 图像采集、 视频检测等 工作都在计算机上完成。这种设计方案人机交互方 便、 开发性强 、 操作性强 。但 是 由于通用 C U采用 P 的总线结构和数据处理方式并不适合于高速信号处 理, 导致该类系统实时性差 ; 且系统需要计算机的支 持, 因此 , 在某些有集成度和使用环境要求的应用领 域使用受到限制 , 而且图像 跟踪处理算法的实现受 视频采集卡基本功能的限制 。另一种采用较多的是 分 布式处 理 方 案 , 体 算 法 分 散 在 多 个 D P上 实 主 S 现 , 由 P 14来 完 成 辅 助 的事 务 性 处 理 , 类 系 而 C0 该 统 的优 越性 体现 在 可靠性 、 扩展 性 、 灵活性 这 三个 方 面, 但性价比、 集成度均不高。 今后 视频 处理 的应 用将 越来 越广 泛 , 特殊 领域 、
Ab t a t I ie a k n i r e c iv a g u e s o p r t g p o e sn n afnt i , o a u e sr c :n v d o t c ig, o d rt a h e e lr e n mb r fo e a i rc s i g i i t r n o n i e me s me me s r s f ri r vn p r n p e r e d d o mp o ig o e  ̄i g s e d a e n e e .A a d r y tm e in b s d o MS 2 C 4 6 h g -p e P a d h r wa e s s e d s a e n T 3 0 6 1 ih s e d DS n g F GA i t d c d P si r u e .T e e p r nsd mo sr t a e s se i mu h e i r h n t e fr rDS ny v d op o n o h x e me t e n tae t tt y tm c a e a me P o l i e r — i h h s s t h o c s i g s se frf l l n e r a - me r q i me t i a r i g o t c mp iae g rtm d mu t t g t e ta - e s y t m o u f l g t e lt e u r n ii h i e n n c ryn u o l td a o h a l -a e x r c c l i n ir
基于多核DSP电视跟踪系统设计

基于多核DSP电视跟踪系统设计摘要本文设计了一套基于多核DSP(MCS320C6678)的电视跟踪系统。
本文中设计的电视跟踪系统采用高灵敏度长波红外图像传感器作为图像数据源,利用DSP多核的特点,采用多种图像跟踪算法,实现了对目标的精确跟踪及定位,为伺服等系统提供目标跟踪位置信息。
文中详细论述了硬件组成及软件工作原理,给出了试验结果及结论。
关键词电视跟踪系统;FPGA;DSP引言电视跟踪系统在军用及民用两个方面具有广阔的应用前景,民用主要用于火情监控、恶劣环境下的情况监测及交通状况监控等;军用主要用于空中目标监控及空中捕获跟踪地面目标等。
二十世纪九十年代以后,随着计算机图像处理技术及DSP器件技术的提高,电视跟踪系统向着体积小型化、多种图像处理算法融合处理方向发展,通常硬件方面采用多CPU协同完成处理工作,软件在多CPU处理平台上多种处理算法并行运行,根据融合策略得出融合目标位置信息[1]。
1 系统组成原理电视跟踪系统组成原理如图1所示。
如图1所示,FPGA为图像数据的控制核心;6678 DSP芯片为图像处理核心。
电视跟踪系统各部分完成功能如下:(1)FPGA负责接收图像传感器的数字口图像数据(CameraLink接口),实时将数字图像存储入外部存储器中;当6678芯片和格式转换器需要读取数字图像数据时,FPGA启动EDMA功能将图像数据从外部存储器中取出,为DSP和D/A转换器提供图像数据源[2];(2)6678 DSP芯片利用自身八核的特点,一个核作为主核,负责调动其他7个核,共同配合完成图像增强、图像滤波、目标提取、目标定位等多项功能;(3)格式转换负责形成相应格式的视频信号,为观测及记录提供数据源;(4)外部存储器负责将图像传感器的图像数据进行缓存,为其他操作提供数据源[3]。
2 系统的硬件设计2.1 图像传感器图像传感器可以采用长波红外热像仪,具体指标如下所示。
(1)波段:3~5μm;(2)有效像元数:640×480(H×V);(3)视频接口:Base CameraLink接口;(4)像元大小:24×24μm;(5)图像帧频:50Hz。
基于FPGA+DSP架构的目标跟踪系统设计与实现

基于FPGA+DSP架构的目标跟踪系统设计与实现摘要:本文提出了一种基于FPGA+DSP架构的目标跟踪系统设计与实现方法。
该系统主要通过FPGA实现特征提取和目标检测,通过DSP实现目标跟踪与位置估算。
本文首先介绍了系统设计的基本框架、硬件实现和软件算法,然后详细说明了系统设计过程中遇到的问题及其解决方案,最后对系统的性能进行了评估。
结果表明,该系统可以完成快速、准确的目标跟踪,实现了较高的跟踪精度和实时性。
关键词:FPGA+DSP,目标跟踪,特征提取,目标检测,位置估算,跟踪精度一、引言目标跟踪技术是计算机视觉领域中的重要研究方向之一,其应用范围广泛,例如智能监控、自动驾驶、无人机导航等。
当前,基于计算机的目标跟踪系统大多采用 CPU 或 GPU 为核心架构,但由于计算量大和速度慢等问题,使得其在实际应用中存在诸多限制。
为此,本文提出了一种基于 FPG A+DSP 架构的目标跟踪系统,旨在提高跟踪系统的速度和精度。
二、系统设计该系统主要由图像采集模块、图像处理模块、位置估算模块和跟踪控制模块组成,其中图像采集模块采用 USB 摄像头获取场景图像,图像处理模块主要通过FPGA实现图像特征提取和目标检测,位置估算模块通过 DSP实现目标位置的计算,跟踪控制模块主要实现目标跟踪和控制。
三、硬件实现图像采集模块采用 AVT-BasleracA2040 摄像头,通过USB3.0接口连接到PC机上。
图像处理模块采用Xilinx 的 Kintex-7 FPGA,使用Verilog HDL 实现图像处理算法。
位置估算模块采用TI 的TMS320C6678 DSP,使用C语言实现目标位置的计算。
四、软件算法该系统主要采用了基于HOG+SVM 的目标检测算法和 KCF (Kernelized Correlation Filters) 跟踪算法。
其中 HOG算法可以有效地提取图像中的目标特征,在 SVM分类器的支持下,实现了目标的检测;而 KCF算法可以通过卷积操作实现图像中目标的跟踪。
基于DSP+FPGA的电弧跟踪控制系统硬件设计
基于DSP+FPGA的电弧跟踪控制系统硬件设计基于DSP+FPGA的电弧跟踪控制系统硬件设计摘要:本文基于数字信号处理(DSP)和现场可编程门阵列(FPGA)技术,设计了一种电弧跟踪控制系统的硬件方案。
该系统能够实时检测电弧的位置,根据跟踪结果控制电弧的终结,提高电弧点火过程的效率和可靠性。
在硬件设计方面,我们采用了DSP和FPGA的协同设计,实现了电弧位置检测和控制算法的硬件加速,提高了系统的实时性和计算性能。
实验结果表明,该系统能够在较大电弧干扰的情况下,稳定可靠地完成跟踪和控制任务。
关键词:电弧跟踪;DSP+FPGA;硬件设计;点火控制1. 引言随着现代工业的发展,电弧在许多领域中扮演着重要的角色。
然而,电弧点火过程中存在着一些问题,如电弧持续时间过长、电弧位置不稳定等。
为了提高电弧点火过程的效率和可靠性,需要一种能够实时检测电弧位置并进行控制的系统。
2. 系统架构基于DSP+FPGA的电弧跟踪控制系统由DSP芯片和FPGA芯片组成。
DSP负责实时采集电弧信号并进行信号预处理,FPGA负责电弧位置检测和控制算法的实时计算与控制。
两者通过高速串行接口进行数据传输和命令控制。
3. DSP模块设计DSP模块主要包括模拟信号采集模块、数字信号处理模块和通信接口模块。
其中,模拟信号采集模块通过高性能ADC芯片采集电弧信号,并进行滤波和放大处理,以保证信号质量。
数字信号处理模块采用高性能处理器,实现电弧信号的数学运算和信号处理算法。
通信接口模块负责与FPGA进行数据传输和命令控制。
4. FPGA模块设计FPGA模块主要包括数据接口模块、电弧位置检测模块和控制逻辑模块。
数据接口模块负责接收DSP传输过来的电弧信号,通过高速并行接口与电弧位置检测模块进行数据交换。
电弧位置检测模块采用改进的算法实现电弧位置的实时检测,通过FPGA内部的逻辑模块进行计算,并将结果传输给控制逻辑模块。
控制逻辑模块根据电弧位置的检测结果,实时控制电弧的终结。
基于多DSP和FPGA的实时双模视频跟踪装置设计

基于多DSP和FPGA的实时双模视频跟踪装置设计1、引言随着现代高速处理器的迅猛发展,图像处理技术也日益成熟。
其中,移动目标的视频检测与跟踪是图像处理、分析应用的一个重要领域,是当前相关领域的研究前沿。
移动目标视频检测与跟踪技术,在机器人视觉、交通监测、可视预警、机器导航等民用领域有着广泛的应用,同时在火力拦截、导弹电视和红外视频制导等军用方面也发挥着重要作用。
基于二维转台以DSP 和FPGA 为核心器件构成的视频识别和跟踪装置,可工作于电视图像或红外两个波段,实现图像跟踪各项功能。
本文提出的跟踪算法与设计的跟踪装置可在一定程度上解决视频跟踪精度低、处理速度慢的问题,同时本视频跟踪装置也可作为进一步研究图像处理与跟踪控制的平台。
2、视频跟踪装置的硬件设计图像处理最主要的是实时性、可靠性和精确度。
针对图像处理速度慢的问题,考虑从硬件和和软件两方面解决:一是选择高速的DSP 和FPGA 为核心器件;二是从平衡图像处理的实时性和效果中选择最优的图像处理算法。
针对图像跟踪可靠性问题,采用双模式复合制导,由处理器根据信号的置信度来选择跟踪模式。
针对图像形心跟踪算法的精度问题,采取基于去图像阴影的图像跟踪算法。
2.1 视频跟踪装置的图像信号处理模块硬件组成为达到实时处理图像信号信息,我们选择3 片高速DSP 作为核心处理器。
其中用作信息融合的是TMS320C6416,在跟踪模块中,使用了两片相对价格低廉一些的TMS320C6201 实现并行图像跟踪算法。
配合DSP 工作的外围逻辑电路,我们采用xlinix 公司的XCV400E 型FPGA,同时实现部分的图像预处理功能。
本视频跟踪装置的图像信号处理模块主要硬件构成如图1 所示:以电视图像波段为例,图像采集模块的传感器是面阵CCD 摄像机,用来采集视频图像信息。
A/D 转换将拍摄到的模拟图像信号转为8 位数字信号送FPGA 处理,。
一种基于DSP和FPGA的自适应模版匹配跟踪系统设计
一种基于DSP和FPGA的自适应模版匹配跟踪系统设计游培寒;胡瑜;盛平;王志民【摘要】以TMS320DM642芯片(DSP)和EP3C25F324C7芯片(FPGA)为主体,设计了一套自适应视频跟踪系统.DSP用于控制视频编解码芯片,完成实时图像的缓存处理,FPGA完成模版匹配计算,系统根据匹配结果自适应更新模板,满足视频位移、放大、旋转等需求.由于模版匹配计算与视频通道隔离,避免了图像迟滞,同时FPGA 的并行处理方式极大提高了系统的数据处理量和处理速度.试验表明,系统对于720×625像素图像数据的处理能力可以达到或超过每秒25帧,最大匹配模版可以达到128×128像素.【期刊名称】《弹箭与制导学报》【年(卷),期】2013(033)005【总页数】7页(P16-22)【关键词】数字信号处理器;可编程逻辑阵列;图像跟踪;模版匹配【作者】游培寒;胡瑜;盛平;王志民【作者单位】95856部队,南京210000;95856部队,南京210000;95856部队,南京210000;94921部队,福建晋江362200;南京理工大学,南京210094【正文语种】中文【中图分类】V249.3220 引言模版匹配和目标跟踪是视频图像实时处理中的难点问题,以往系统设计中,由于器件的运算速度有限,不能够做到大规模的模版匹配和大范围的搜索运算。
而完全依赖金字塔等算法对模版进行压缩又会丢失大量信息[1],造成匹配精度不高和跟踪不稳定,多处理器工作方式是实时视频处理系统设计的唯一解决方法。
但是以往设计中,大量系统资源被用于总线控制和系统间数据传输,影响了系统性能的发挥[2]。
文中设计了一套基于 DSP和 FPGA的图像模版匹配和自动跟踪系统。
DSP 主要负责图像数据的传输和控制,并预处理匹配模板和匹配数据;而FPGA完成模版匹配并将目标位置信息传递回DSP。
由于模版匹配和图像处理过程相对独立,避免了图像的迟滞。
基于DSP+FPGA的嵌入式视频采集系统设计的开题报告

基于DSP+FPGA的嵌入式视频采集系统设计的开题报告一、研究背景和意义随着视频技术的迅速发展和广泛应用,视频采集技术作为视频系统的重要组成部分,也逐渐受到了广泛的关注和重视。
嵌入式视频采集系统是将视频采集功能集成到嵌入式平台上的一种系统,其具有体积小、功耗低、价格便宜、性能强等优点,被广泛应用于安防监控、医疗影像、工业检测等领域。
目前,常见的嵌入式视频采集系统多是基于FPGA或者DSP平台实现的。
基于DSP+FPGA的嵌入式视频采集系统具有DSP优秀的高速及浮点计算能力以及FPGA强大的并行处理和可编程性等优点。
因此,通过DSP 和FPGA组合的方式来实现嵌入式视频采集系统可以充分发挥两种芯片的优势,提高系统的运算速度和数据处理能力,更好地满足不同应用场景下的需求。
该研究旨在设计一种基于DSP+FPGA的嵌入式视频采集系统,探索DSP与FPGA协同实现高速数据处理的方法,并在实际应用场景中进行验证。
其意义在于提高嵌入式视频采集系统的性能和可靠性,满足不同应用场景下的需求,推动视频技术的发展。
二、研究内容和思路本研究的主要内容包括以下几个方面:1. 确定嵌入式视频采集系统的需求和技术指标:根据实际应用场景的需求和技术指标,确定系统的输入输出接口、数据传输速度、存储容量、视频处理算法等方面的要求。
2. 设计基于DSP+FPGA的嵌入式视频采集系统架构:基于DSP+FPGA的协同设计,确定系统的硬件架构和软件架构,选择合适的DSP和FPGA芯片型号,设计采集板和数据传输线路等。
3. 实现DSP+FPGA协同高速数据处理算法:开发基于DSP+FPGA 的协同高速数据处理算法,包括图像采集、处理、压缩、传输等步骤,探索DSP和FPGA之间的数据传输方式和协议,优化算法性能。
4. 验证系统性能和可靠性:将设计的嵌入式视频采集系统应用于实际场景中,测试系统的性能和可靠性,包括数据传输速度、图像质量、功耗等方面。
基于DSP+FPGA框架的实时目标跟踪系统设计

基于DSP+FPGA框架的实时目标跟踪系统设计高文;朱明;刘剑;汤洋【期刊名称】《液晶与显示》【年(卷),期】2014(29)4【摘要】随着我国武器研制水平的不断提高,高速度、高机动能力的武器装备越来越多,为了使型号武器中的目标跟踪器对于目标大尺度变化、速度快等情况有很好的鲁棒性,本文设计了一款基于DSP+ FPGA的实时目标跟踪系统.针对均值漂移算法不适用于快速运动目标等限制情况使用多级金字塔进行了改进,采用背景加权的核直方图建立目标模板从而减小跟踪框中背景对于跟踪的影响,并将整个算法进行了优化以在嵌入式系统上实时实现.实验结果表明,本文设计的实时目标跟踪系统对于目标的快速运动、尺度变化以及一定程度的模糊均有很好的跟踪结果.每帧的平均处理时间为13.5 ms,满足实际工程的实时性和稳定性要求.【总页数】6页(P611-616)【作者】高文;朱明;刘剑;汤洋【作者单位】中国科学院长春光学精密机械与物理研究所,吉林长春130033;中国科学院长春光学精密机械与物理研究所,吉林长春130033;中国科学院长春光学精密机械与物理研究所,吉林长春130033;中国科学院长春光学精密机械与物理研究所,吉林长春130033【正文语种】中文【中图分类】TP394.1;TH691.9【相关文献】1.基于Camera Link标准的DSP+FPGA高速实时数字图像处理系统设计 [J], 陈炎斌;金钢2.基于DSP+FPGA的实时信号采集系统设计与实现 [J], 周新淳3.基于DSP+FPGA的实时图像去雾增强系统设计 [J], 贺柏根;刘剑;马天玮4.基于DSP+FPGA的实时视频信号处理系统设计 [J], 苏宛新;程灵燕;程飞燕5.一种基于DSP+FPGA的目标跟踪系统设计 [J], 赵军;单甘霖;贺志华因版权原因,仅展示原文概要,查看原文内容请购买。
基于DSP+FPGA的电视跟踪器的研究与实现的开题报告
基于DSP+FPGA的电视跟踪器的研究与实现的开题报告一、选题背景及意义随着科技的发展与广泛应用,电视已成为人们生活中不可或缺的一部分。
然而在使用电视时,往往需要频繁地更换频道,不仅影响了观看的舒适度,也浪费了人们的时间。
因此,通过引入电视跟踪技术,可以有效提高电视的使用效率和人们的生活质量。
目前,市面上已经存在一些使用红外发射的电视跟踪器,但其跟踪精度和响应速度都存在一定的问题。
因此,本课题打算使用DSP+FPGA 的结构来实现一个高精度、快速响应的电视跟踪器。
二、研究目标及内容本课题的主要研究目标是设计并实现一个DSP+FPGA结构的电视跟踪器。
具体的研究内容包括:1.研究电视跟踪器的基本原理和不同的跟踪算法;2.选择合适的DSP+FPGA开发板和相应的开发软件,完成系统的硬件实现;3.设计并实现跟踪算法,并对跟踪器进行性能测试和评估;4.使用对跟踪器进行效果验证,对系统进行优化和调试。
三、预期成果及意义完成本课题后,将会取得以下成果:1.设计并实现一种基于DSP+FPGA的高精度、快速响应的电视跟踪器,能够有效提高电视的使用效率;2.掌握DSP+FPGA的开发技术和应用,为后续相关研究提供参考和借鉴;3.为推动数字电视技术的发展和提高人们的生活质量做出一定的贡献。
四、拟采用的方法本课题将采用以下方法进行研究:1.文献调研方法,了解电视跟踪技术的基本原理和跟踪算法的优缺点;2.系统分析方法,对跟踪器所需的硬件资源和性能进行分析和测算;3.软硬件协同方法,使用DSP和FPGA相结合的方式实现跟踪器,并在跟踪算法上进行优化;4.性能测试方法,对跟踪器的精度和响应速度进行测试和评估,指导系统的优化和调试。
五、进度安排本课题的研究进度安排如下:1.前期调研(一个月):调研电视跟踪技术的基本原理和跟踪算法,并掌握DSP+FPGA开发技术和应用;2.系统设计(两个月):选择合适的DSP+FPGA开发板和开发软件,完成系统的硬件实现,并设计跟踪算法;3.算法优化与测试(两个月):对跟踪算法进行优化,并对跟踪器的性能进行测试和评估;4.系统优化及论文撰写(两个月):对系统进行优化和调试,并进行论文撰写和上报。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第32 卷第 1 2期2 00 6年 1 2月电子工程师V o.l 3 2N o. 1 2D ec. 200 6E L E CT R O N I C E NG I N EER•40•基于D SP和FPGA 的电视跟踪系统设计姚智刚, 付强(军械工程学院光学与电子工程系, 河北省石家庄市050003)摘要: 介绍了一种以DSP(数字信号处理器)为核心处理芯片的数字式电视跟踪系统的设计。
DSP主要实现视频图像的采集、预处理、二值化、目标识别、跟踪、预估等任务; 而FPGA (现场可编程门阵列)主要实现实时的视频信息叠加和一些控制功能。
在介绍系统硬件设计的基础上, 分析了软件的任务模块和其实现方法, 以及FPGA 的主要功能。
实验证明, 本系统的性能高、扩展性强。
关键词: 电视跟踪系统; D SP; FPGA; 视频信号中图分类号: TN 911. 7 30引言随着计算机技术和图像处理技术的飞速发展, 被动式电视跟踪系统以其高分辨率、直观感强、抗干扰性能好、成本低等优点, 在军事上受到普遍重视, 尤其在防空火控系统中获得了广泛应用。
然而, 由于数字图像处理技术数据量庞大, 算法复杂, 使得运算速度和精度往往成为限制电视跟踪系统整体性能的瓶颈。
解决办法包括采用多处理器模式、提高核心处理芯片的运算能力或者探索更加高效的跟踪算法等。
无论从设计的简化还是便于系统升级来说, 提高核心处理芯片运算能力的方法无疑受到广大用户的青睐。
专门用于视频图像或者音频信号的D SP(数字信号处理器)芯片能够满足以上需求。
另外, F PGA (现场可编程门阵列)的诸多优点使其迅速应用到数字电路设计中。
在核心芯片D SP的控制下, 配合FPGA, 能实现较复杂的图像处理任务和控制算法。
FPGA 对DSP起到重要的辅助作用, 简化了电路设计, 降低了成本, 提高了稳定性。
基于D SP的电视跟踪系统中, 探索出了一种利用FPGA 完成视频叠加和其他辅助功能的方法, 构成了一个功能完整的实时目标搜索跟踪系统。
1系统硬件设计系统组成框图如图1所示, 主要由图像输入部分、图像识别处理部分和伺服随动系统三大部分组成。
图像输入部分为摄像头或视景仿真计算机。
摄像头用来摄取实时图像, 视景仿真计算机则可以根据训练或评估的需要, 设定多种目标模型和航路参数, 利用3D 建模软件模拟实战环境和飞行条件, 实时产生视频图像信号。
图像识别处理部分主要由图像采集模块、目标收稿日期: 200 5-09-27;修回日期: 200 5-12-08 跟踪和识别模块、通信控制模块、伺服控制模块、字符和信息叠加模块、电源模块组成。
实时采集并处理输入的视频信号, 完成对目标的搜索和跟踪, 并在输出视频上叠加字符、波门等信息。
并将目标偏移量进行D /A转换及放大调整, 监测操作面板各个开关的状态。
伺服随动系统根据上述偏移量对云台(摄像头)位置进行调整或将误差信号传输给视景仿真计算机, 控制目标的生成, 从而实现对仿真目标的电视跟踪。
本系统采用的核心处理芯片是TM S320DM 642 DSP, 这是一款针对视频/图像处理的定点D SP, 其显著特征是高度集成了视频输入输出端口, 支持所有主要的视频标准。
本系统中采用其视频端口0和视频端口2, 分别连接视频编码芯片和解码芯片, 负责视频信号的采集和输出。
通信控制模块包括两路标准R S-232串口, 其中一路连接系统控制面板, 读取开关状态, 控制面板指示灯, 另一路连接火控计算机, 接受火控计算机输出的火控系统参量信号, DSP控制其与原视频信号进行叠加复合, 然后送监视器供操作手观察。
图1系统结构2系统软件设计软件从功能上可分为图像采集、图像处理、识别跟踪、显示控制和主控等模块, 主要完成视频采集、视频(帧信号)处理(预处理、二值化、目标识别、跟踪、预估)、视频叠加、网口(视景仿真计算机)通信、I2C 通信(辅助控制板)和视频显示6个任务。
第 3 2 卷第 12 期 姚智刚, 等: 基于 D SP 和 FP GA 的电 视跟踪系统设计 • 信号处理与显示技术 •T I 公司 D SP 开发环境为 CCS , 对应 DM 642 的版本是 2. 21, CCS 中工作模式采用多线程处理方式, 图 2 中各个功能块作为不同的任务分别创建、执行。
向视景仿真 计算 机提供 目标 方位 高低 偏 移量 ( 两个 8 位 数 字 量 ) ; ! 仿真计算机向 D S P 输出命令字; ∀ 向伺服控制模块提供目标方位高低偏移量 ( 两个 8位数字量 ) ; # 操作面板开关量和复 位 信号。
图 2 CC S 任务模块流程视频处理任务定时向辅助控制板报告其当前工作 状态, 如果处于锁定跟踪状态则送出目标偏移量, 否则 送出两个全零字节。
然后, 辅助控制板向 DSP 报告对 操作面板的监测结果。
为了防止多任务造成资源冲突, 造成程序混乱, 需 要对它们执行的时序和调用关系进行控制。
本系统采 用了两种方法进行控制:a) 使用 SC OM ( 同步通 信模块 )。
SCOM 的 作用 是在两个任务之间传递消息, 对于两个有确定时序关 系的模块, 确保两者按照规定顺序执行, 避免对共享区 域形成读写冲突。
b ) 使用临界段定义。
对于时序关系不确定的两 个任务, 它们之间的共享数据定义为临界段代码, 这使 得其数据不能被一个以上的进程同时访问, 并禁止其 他无关线程访问临界数据。
否则, 如果其他线程访问 了其内部数据, 可能使得整个程序处于异常状态, 可能 导致资源冲突、死机或者其他不良后果。
本方法的缺 点是临界数据不能过长, 否则将使得程序执行缓慢。
3 视频叠加的实现电视监视器上需要显示的字符、波门信息供操作 者观察使用, 其叠加任务 由 FPGA 实 现。
采用 FPGA 完成视频叠加任务的数字式电视跟踪系统的优点主要 体现在以下两个方面: 首先, 系统中不可避免存在大量 控制信号, 需要进行较多的逻辑变化, 为了避免分立器 件 带来 的电 路的繁 琐, 提高稳 定性 , 可 以充 分利 用 FPGA 空间, 利用 FPGA 完成逻辑处理任务, 从而不添 加额外的逻辑控制电路。
其次, 在视频信号上叠加火 控计算机送来的信号, 包括目标高度量、距离量和速度 量、跟踪波门、跟踪状态以及视场中心十字线。
这些信 息的叠加要求透明显示, 能够实时刷新, 而 FPGA 就能 够达到上述要求。
本系统选 用的 FPGA 型号 为 X ili n x X C2300E , 属 于 X C2000 系 列, 等 效 门 数 为 6 912, 封 装 形 式 为 PQFP20 8。
FPGA 作为连接 DSP 与视频编码器 ( Ph ili p s SAA 71 05 )的桥梁, 即在 D SP 输 出的视频数据 流上添 加 FPGA 环节, 完成视频叠加任务。
同时, FPGA 还实 现对各种控制信号的逻辑组合和变换等。
按照系统各个功能模块划分, FPGA 的功能有:a)通过 EM IF ( 扩展存储器接口 ) 控制 8 个系统指示灯。
b ) 通过 E M IF 控 制 8 个 G P I O ( 通用 输入 /输 出 位 ) ;c)产生 EM I F 缓存的控制信号 D IR 和 OE z 。
d ) 为 PLL 170 8时钟发生器提供串行控制接口。
e)为 F l ash 存储器提供 3 个控制位。
f)实现对串口 UART ( 通用异步收发器 ) 和视频解 码器中断的逻辑控制, 并产生送给 DSP 的边缘触发信 号。
g)当 DSP 视频端口送出的视频数据为 8 位时, 将 视频数据直接送往视频编码器。
h ) 当 D SP 视频端口送出的视频数据为 16 位时, 由于 16 位数据在时钟上升沿输 出给 FPGA, FPGA 将 其转换为双时钟模式, 即前 8 位在上升沿输出, 低 8 位 在下降沿输出。
i ) 为 D SP 输出的视频数据提供一个 CLUT ( 颜色 查询表 )。
这里 CLUT 作为一块 RAM 区, 写入使能信 号由地址编码器控制。
内部依次存储 的数据包括 Y ( 亮度 ) 、C b ( 饱和度 ) 、C r ( 色度 ) , 利用 这三者的数据 组合来显示 128 种颜色。
需要特别说明的是, 每个颜 色 单 元 分 配 了 2 4 b i t, 其 中 0 b it ~ 7 b it 为 Y , 8 b it ~ 15 b i t 是 Cb , 16 b it~ 23 b it 是 C r , 这样安排是为了方便 CLUT 的写入和读取。
通过查询颜 色代码, 可 将取得 的颜色值赋给待叠加信息, 实现其颜色的可控性。
特别是 FPGA 内部设有一个 256 字节、32 b its 的 数据 F IFO, 用来存储显示信息。
F I FO 存储区 允许写 操作, 数据写入的方式采用 D M A , 其格式采 用 32 b i t 输入。
FPGA 从 F I FO 中取得数据后与 视频数据进行 叠加, 产生新的视频数据流输出。
O SD ( O n_S c reen _D isp lay ) 混合模块是 FPGA 的核 心部分, 它接收逻辑控制单元的控制, 判断是否需要叠 加 F IFO 送来的显示信息。
若否, 则说明无叠加信息, 只输出原有视 频数据; 若是, OSD 转换模块数 据首位 被激活, CLUT 数据与视频数据混 合叠加后输出。
由 于 DSP 送出的视频数据采用 B T. 65 6模式, 且为 16 b i t 宽度, 所以这里设计了一个 DDR 模块, 其功能是在时 钟的上升沿输出灰度数据, 下降沿输出色度数据。
• 41•• 信号处理与显 示技术 • 电 子 工 程 师 20 06 年 12 月• 42•4 系统设计的突出特性实践证明, 利用 FPGA 实现视频叠加和其他辅助 功能的方法能够有效地提高系统处理速度, 其可扩展 性和适应性也得到加强。
a) FPGA 减轻了 DSP 的处理负荷。
系统设计的 突出点在于 FPGA 与 DSP 之间采用 D M A 方式传输待 叠加的显示信息, 通过中断的方法触发传送事件。
b ) DM 6 42和 FPGA 的高集成度大大简化了系统 硬件设计。
外围电路简单, 提高了稳定性。
c) FPGA 的时序逻辑调试可用软件仿真实现, 降低了硬件调试难度。
参 考 文 献[ 1 ] X il i n x P r og ra m m a b le L og ic D ata B oo k [ M ] . San Jo se , CA,USA: X ilinx In c , 200 0.[ 2 ] B E T E M AN A. DS P 算法、应用 与设计 [ M ] . 陈健, 陈 伟, 汪 书宁, 等译. 北京: 机械工业出版社, 2 003. [ 3 ] 杨淑莹. VC++ 图 像处理程序设计 [ M ] . 北京: 清 华大学出版社, 2 00 3. [ 4 ] 杨明林, FPG A 控制实现图像 系统视 频图像 采集 [ J ] . 计算 机测量与控制, 200 3, 11 ( 6) : 45 1-45 4.D e sign of TV T r a ck i ng Syste m Based on DS P and FPGAYAO Zh i gang , F U Q i an g( O rdn an ce E ng i neer i n g Co ll ege , Sh ijiazhu ang 05 0003, Ch i n a )A b s t rac t : D ig ita l TV tra ck i n g syste m based on t h e p r oc ess i ng ch i p D SP i s i n trodu ced . Th e f un cti o n o f DSP i s to ach i eve collecti on , p rep rocess i n g , seg m e n tati on , target iden t ifica tion , track i n g and es ti m ati on ; a nd FPGA i s used to overl ap v i d eo sign al s and con tro.l In trod uc i n g th e h ar dw are des i g n f i rs,t the m ission m odu l es of th e so ft w are and rea lizat ion m ethods are an a l y zed , as w e ll as th e f un cti on of FPGA . T he syste m i s sho wn byexperi m en ts to h ave h i gh p er f o r m an ce and po w er f u l expan s i b ility .K eyw o r d s : TV track i n g syste m; DSP ; FPGA ; v i deo s i g n al( 上接第 39页 )参 考 文 献[ 4 ] X i l i n x V irtex - ∃ Pro p l a t f or m FPGA h a n d b ook , UG 0 1 2( v2. 0 ) [ S ] . 200 2: 119-130.[ 1 ] DOOLEY S R , ST EW ART R W, DU R R AN I T S . F as t o n - l i n eB -sp li n e i n t e r p o lat i o n [ J ] . E lectron ic L et t ers , 1 999, 35 ( 1 4 ) : 11 30-1 131. [ 2 ] 郑慧娆, 陈 绍林 , 莫忠 息, 等. 数值 计 算方 法 [ M ] . 武 汉:武汉大学出版社 , 200 2: 210-217. [ 3 ] 夏宇闻. V er il og 数字系统 设计教 程 [ M ] . 北京 : 北 京航空 航天大学出版社, 200 3: 1 05-110.[ 5 ] UN SER M, AL D R OU B I A, EDEN M. B -sp li n e s i g n a l p r o ces s -ing : P art I th e o ry [ J ] . I E E E T ran s on S i g n a l P r o cess i n g , 19 93, 41 ( 2 ) : 8 23-8 24.[ 6 ] UN SER M, AL D R OU B I A, EDEN M. B -sp li n e s i g n a l p r o ces s -ing : P art ∃ e f f i c ien t d es i g n an d ap p l i c at i o n s[ J ] . IEEE T r a n s on S i g n a l P rocess i n g , 199 3, 4 1 ( 2) : 835-83 6.D e sign of H igh P erfor mance On li ne B Spli ne I n t e r po l ator a ndIts FPGA I m p le m en tat i onS ONG L ,i PAN Zh i w e n ( Sou theas t U n i v e rs i ty , N an j i ng 2100 96, Ch i n a )A b s t rac t : In te rp ola t i o n i s w i d el y em p l oyed i n s i g n al p roce ss i n g f ie l d , an d var iou s algor ithm s have b een proposed .B sp li ne i n te rpo lati on i s a w e ll -p erfor m i n g a l g orit h m, easy to i m p lem en t i n hardw are arch itec tu re . An alys i s of the B sp li n e in te rpo lati o n and study of i ts th ree -stage f ilter i n g i m p lem en tati on i s p resen ted i n d e - tai .l T h e f i n al a l g orit h m i s f ou nd by co m par i n g cub i c B sp l i ne an d sp li n e s i m u lation resu l ts . F ina ll y , th e in te r - p ola t i o n algo ri th m i s reali zed i n ver il og h ard w are d escr ip ti on langu age , and tested on V e rtex -∃ pro 100 ch i p o f X ili nx Co m pany .K eyw o r d s : in te rpo l a tor ; B sp li n e ; p ipe li n e ; FPGA i m p lem en tati o n。