基于MC56F82748 DSC的单电阻采样三相交流 感应电机的矢量控制
AN3476_基于MCF56F8013的洗衣机的三相交流感应电机直接矢量控制方案(中文)

飞思卡尔应用笔记AN3476洗衣机的三相交流感应电机直接矢量控制方案——基于MCF56F8013文件编号:AN3476版本:1,08/2007苏州大学飞思卡尔嵌入式教学与应用培训中心译2008年5月目录1 应用特性 (1)1.1 Freescale控制器的优势和特点 (3)2 交流感应电机的矢量控制 (4)3 矢量控制算法概述 (7)3.1 转子磁通的估算 (9)3.2 自适应电路 (10)3.3 定子电压的解耦 (11)3.4 空间矢量调制 (12)3.5 电流控制回路 (14)3.6 三相电流的重构 (15)3.7 弱磁控制模块 (17)3.8 利用转速传感器的速度感应 (17)3.8.1 利用转速传感器和外部硬件比较器的速度感应 (17)3.8.2 利用转速传感器和软件比较器的速度感应 (18)3.9 速度控制回路 (19)4 洗衣机算法 (20)4.1滚动洗涤循环 (21)4.2 失衡检测 (21)4.3 脱水循环 (21)5 软件设计 (22)5.1 应用程序流程图 (22)5.2 应用程序状态图 (23)6 用户控制接口 (24)6.1 FreeMaster控制界面 (24)7 洗衣机驱动参数的调整 (26)8 飞思卡尔半导体公司的技术支持 (27)9 参考文献 (27)10 术语表 (28)洗衣机的三相交流感应电机直接矢量控制方案——基于MCF56F8013Pavel Sustek, Petr SteklFreescale半导体公司洗衣机设计上的最新趋势是用新型的、电子控制的无刷驱动器取代传统的驱动系统。
过去,洗衣机的设计主要借助于两个广泛应用的驱动系统。
较早的设计采用机电控制的双速单相交流感应电机。
这种驱动系统在新的机器中已经不再使用,而仅在最廉价的机型中还有些应用。
之后,绝大多数洗衣机都采用晶闸管(TRIAC)控制的通用型有刷电机。
然而,随着新电子器件的出现,这些驱动系统正在逐渐被淘汰。
三相PWM整流器基于空间矢量的直接功率控制52_4414.

三相PWM 整流器基于空间矢量的直接功率控制张明莲[1] 杨雪峰[2](1徐州空军学院四站系航空电气教研室 江苏 徐州 221002)(2中国矿业大学建筑设计研究院 徐州 221006)摘要:本文介绍一种新型的三相电压型PWM 整流器基于空间矢量调制的直接功率控制(DPC-SVPWM),给出了基于虚磁链的功率估算式,设计了功率调节器参数,对有功功率调节器和无功调节器之间的相互耦合影响关系做了分析,并做了仿真研究。
研究和分析表明,三相电压型PWM 整流器基于空间矢量调制的直接功率控制系统具有结构和算法简单、高功率因数、低谐波、开关频率固定等优点。
关键词:PWM 整流器;直接功率控制;虚磁链;空间矢量Simple Direct Power Control of Three-Phase PWM Rectifier Using Space–Vector Modulation (DPC-SVM)ZHANG Ming-lian [1] YANG Xue-feng [2](1 The electric staff room of four stations,the air force martial eustitute of xuzhou ) Abstract :This paper introduces a novel and simple direct power control of three-phase pulse-width -modulated (PWM) rectifiers using space-vector modulation (DPC-SVM). The active and reactive powers are used as the pulse width modu -lated (PWM) control variables instead of the three-phase line currents being used.Moreover, line voltage sensors are replaced by a virtual flux estimator. The theoretical principle of this method is discussed. The results of DPC-SVM thatillustrate DPC -SVM exhibits several features, such as a simple algorithm, good dynamic response, constant switching frequency,and particularly it provides sinusoidal line current when supply voltage is not ideal.Key words :PWM rectifier;Direct Power control ;Virtual_flux ;Space voltage 引言与感应电机磁场定向的直接转矩控制相似,三相PWM 整流器基于电压的直接功率控制(V oltage-based Direct Power Control ,V-DPC) [1]和基于虚拟磁链定向的直接功率控制(Virtual- Flux-based Direct Power Control ,VF-DPC) [2]是通过直接对整流器输入输出功率进行控制,即通过估算功率和给定功率的偏差来实时确定开关状态的选择,以实现整流器直流侧和网侧能量的平衡。
基于DIO模块和SA4828的三相交流信号源的实现
调制波频率范围0~l kHz,载波频率12 kHz,脉冲删 除时间12肛s,延时时间6斗s,采用标准正弦波形,使用 A相控制幅值,相序正转,“看门狗”不使用,输出禁止
—wDl5十六位组成,根据式(5)计算出删值,它的
二进制数即为时间常数。 t=("M×1024)/工№ 3.2控制寄存器编程 控制寄存器控制系统运行过程中的sPwM输出, 如频率、软件复位、看门狗使能、计数器清零、启动停止、 正反转及幅值控制等。对其设置的方法也是先将数据 写入暂存器中,然后通过对R。的写操作将数据写入控 制寄存器中。控制寄存器中的参数可在运行中实时改 变,以控制输出脉宽调制波形的状态,实现对信号源输 出状态的实时控制。它的各暂存器内容如表2所示。
图】
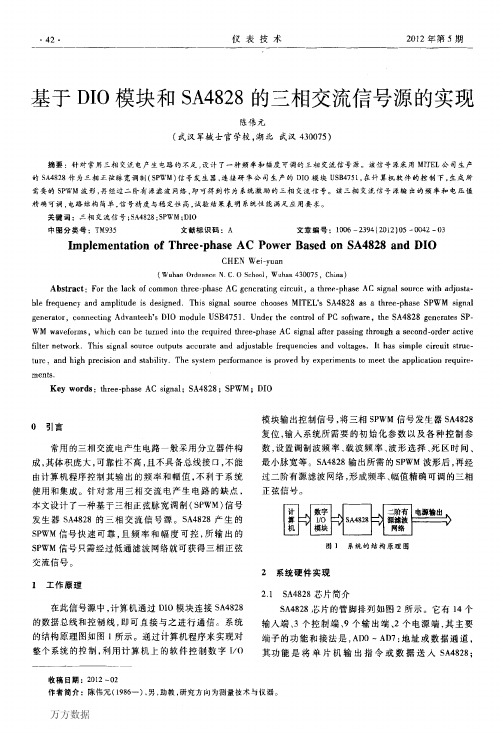
系统的结构原理圈
2系统硬件实现
1
工作原理
2.1
SA4828芯片简介 sA4828芯片的管脚排列如图2所示。它有14个
在此信号源中,计算机通过DIO模块连接sA4828 的数据总线和控制线,即可直接与之进行通信。系统 的结构原理图如图l所示。通过计算机程序来实现对 整个系统的控制,利用计算机上的软件控制数字I/0
盯阿。民毗L 町
唧吨邮Ⅲ圳训 哪晒邮M灿柚
向D00—7输出 地址值 将D08置低,D09 置低,一定延时
(1)调制波频率选择。调制波频率选择字由 PFs0一PFsl5十六位组成,通过式(6)求得尸Fs值,它 的二进制数即是调制波频率选择字。 fPoⅣeR=0}tAvGE/65536)x PFs 06)
不管,写R。 因为uSB475l和SA4828的连接方式是仿地址和 数据总线复用模式,参照它们的硬件连接以及
b
usB4751的软件控制方式,三相交流信号源的编程流
6 ; H ¨
基于单线圈永磁机构的相控开关控制器的设计

差强人意,而选相投切技术则为彻底解决这些问题提供了新思路。
选相投切技术其实质就是根据不同的负载特性,控制开关在电压或电流最有利的相位(电角度)完成合闸或分闸,以主动消除开关过程所产生的涌流和过电压等电磁暂态效应,或提高开关的开断能力,是当前国内外开关智能化的前沿课题之一。本论文从励磁涌流的产生机理及其危害,变压器建模
,空载变压器选相投切的控制策略,选相控制系统的软、硬件设计等几个方面展开论述,为相控真空开关在国内的进一步研究与推广提供了参考与支持。
单线圈永磁机构结构简单、体积小,在中压领域得到越来越广泛的应用。相控真空开关采用三相独立操动的单线圈永磁机构,其操作电源为由大功率电力电子器件控制的储能大容量电容器,通过多次的测试结果表明单线圈永磁机构能很好地满足相控开关的要求,是相控开关的理想选择。
最后,本文对选相投切空载变压器进行了初步探讨。分析了变压器铁芯的动态磁化特性与数学建模过程,讨论了选相开断空载变压器时的相位与剩磁的关系及其对选相关合的意义,并利用MATLAB软件建立了系统仿真模型,分析验证了空载变压器的选相关合策略,为进一步实现空载变压器的选相投切打下基础。
5.学位论文田海松空载变压器相控投切技术研究2008
单电阻采样的永磁同步电动机相电流重构策略
单电阻采样的永磁同步电动机相电流重构策略黄科元;伍瑞泽;黄守道;高剑【摘要】为了减少变频器的成本,提出一种利用单电阻采样三相逆变器母线电流来重构永磁电机相电流的策略.将电流重构盲区划分成3个区域:低调制不可观测区、中调制不可观测区和高调制不可观测区.在低调制不可观测和中调制不可观测区采用插入测量脉冲的方法,在高调制不可观测区采用电压矢量近似的方法.该方法能实现全范围的相电流重构,使调整后的空间矢量脉宽调制波形仍然具有对称性,并且能固定一个采样点;在永磁同步电机矢量控制系统中进行了实验验证.【期刊名称】《电力系统及其自动化学报》【年(卷),期】2018(030)009【总页数】7页(P114-120)【关键词】单电阻采样;相电流重构;永磁同步电动机;空间矢量脉宽调制;逆变器【作者】黄科元;伍瑞泽;黄守道;高剑【作者单位】湖南大学电气与信息工程学院,长沙 410082;湖南大学电气与信息工程学院,长沙 410082;湖南大学电气与信息工程学院,长沙 410082;湖南大学电气与信息工程学院,长沙 410082【正文语种】中文【中图分类】TM470.40中小变频器产品对性价比要求较高,电流采样电路在整机成本中所占的比例是不可忽略的。
较为常用的电流采样方法是采用两个电流传感器测量电流,但是存在两个电流传感器不匹配带来的增益误差的问题,而且成本较高。
使用单电阻采样的逆变器母线电流重构电机相电流,可以避免以上问题,但是单电阻采样存在电流重构的盲区[1]。
针对单电阻采样重构电流存在的不足,学者提出了很多方法[2-10]。
文献[2]采用正弦曲线拟合观测器,使估计的电流趋近参考正弦三相电流,但严重地依赖电机参数,且误差较大;文献[3]提出在每个调制周期末插入3个测量脉冲,虽然这种脉冲宽度调制PWM(pulse width modulation)方法减少了由于采样时刻不确定带来的误差,但导致输出电压矢量的幅值减少,而且使功率器件开关损耗增大。
飞思卡尔与南京航空航天大学合作推出空间矢量调制 –直接转矩控制(SVM-DTC)解决方案

图 南京航空航天大学自动化学院教授黄文新博士在认真讲解研究成果
飞思卡尔亚太区市场营销和业务拓展总经理张焕麟表示:“56F8xxx系列是帮助改善多种电机能效的理想选择,而实现无位置传感器的控制是市场发展趋势。我们很高兴与南京航空航天大学合作,研发更多更好的下一代基于飞思卡尔DSC系列的ACIM、BLDC、PMSM等电机和压缩机解决方案。”
与当前业内采用的其它控制算法相比,SVM-DTC是一种结构简单、动态性能良好的自适应电机控制算法,具有低噪音、低振动等特点。SVM-DTC不依赖于转子参数,控制回路较少,因此能轻松适应不同电机型号的需求。
飞思卡尔的下一代DSC产品系列MC56F8xxx集成了高速模拟功能和高效16/32位数字信号处理器内核,可以对电源(数字电源转换)和电机提供精确的数字控制。MC56F8xxx系列的性能、精密度、准确度和控制能力有助于改善各类应用的系统稳定性。
飞思卡尔与南京航空航天大学合作推出空间矢量调制 –直接转矩控制(SVM-DTC)解决方案
飞思卡尔半导体[NYSE: FSL] 与南京航空航天大学日前联合宣布,双方合作推出无位置传感器型空间矢量调制—直接转矩控制(SVM-DTC)解决方案。该创新解决方案基于飞思卡尔数字信号控制器(DSC)56F8xxx系列,并极好地解决了压缩机、风机控制应用在绿色环保、高性价比、面市时间和自适应性等方面的多项要求。
三相异步电动机变频调速与仿真
工 业 技 术118科技资讯 SC I EN C E & TE C HN O LO G Y I NF O R MA T IO N在当今世界发展潮流中,能源问题愈加凸显,电能作为消耗最多也浪费最多的能源中的一种,长久以来,各国学者专家把如何高效利用电能减少浪费作为研究课题;随着我国国民经济的飞速发展,电机应用于国民经济各个领域,推行高效的节能的电机保证电网稳定和安全运行、电能高效利用已成为必然趋势。
电机调速广泛存在于我们周围,其主要分类有直流电机和交流电机。
直流电机好控制,因此用在很多场合。
电力电子控制器件的发展、各种控制方法在应用上的逐步成熟,未来交流电机应用将远大于直流电机。
1 调速系统硬件电路的设计1.1 硬件概述基于TMS320LF2407A的总体硬件结构图如图1所示。
主电路选择交-直-交电压型变频器。
整流桥采用二极管三相整流全桥,逆变桥采用IPM作为功率器件,DC-link环节利用大电容滤波。
控制电路共两大部分,TMS320LF2407A DSP核心电路和其外部扩展电路。
1.2 逆变电路模块设计逆变电路采用IPM(Intelligent Power Module),有关IPM的优点前文已经做过介绍,在此主要是根据该文所控电机选用合适的IPM.逆变桥每个IGBT承受双向峰值电压为:V U U m 537380221 (1)考虑到2~2.5倍的安全系数,可取耐压值为1200V。
考虑 2~2.5 倍的安全裕量,通态峰值电流取25A。
因此,选用PM25RSB-120型IPM。
1.3 泵升电压限制电路设计由于电压型变频器很难实现再生制动,可用电阻Rb消耗电机制动过程中产生能量。
电机制动时,整流器与逆变器都工作在整流状态,此时电机发电,电容双向充电,DC环节的直流电压(泵升电压)就会变大,对此电压不限制,就可能击穿IGBT。
为此要给电动机提供一条降压路径。
IPM 自带制动单元,Br、B为其信号出入后, DSP通过图1中的两个10k的电阻 R1、 R2检测电容器端电压,测得电压高于正常直流电压一定倍数时,DSP 的 I/0 口发出信号,并经过光电隔离触发IGBT7,使其导通,从而使电容器储存的能量消耗在制动电阻上。
基于R S - 4 85通信的三相三线制智能化电能量采集研究
信息化工业科技创新导报 Science and Technology Innovation Herald2DOI:10.16660/ki.1674-098X.2018.26.002基于RS-485通信的三相三线制智能化电能量采集研究①王洪一 庞甲甲(巴彦淖尔市电业局电能计量中心 内蒙古巴彦淖尔 015000)摘 要:随着电子式电能表与数据采集通信技术在智能电网中的高速进步,电能量数据的自动采集系统已得到广泛的发展与应用。
本文研究一种智能化电能采集方式,能够安全可靠、迅捷智能地完成对三相三线接线方式电能表的数据采集,并基于DL/T645-2007规约协议,通过RS-485端口,将数据传送到电能采集终端中去。
电能采集终端再通过GPRS无线通信技术,将数据发送至上位机电能采集系统。
电能采集系统有着良好的(HMI )人机互动界面,将采集到的电量显示并保存到数据库,为智能电网的数据分析和计算考核提供依据。
关键词:智能电网 三相三线电能表 电能采集终端 RS-485通信 GPRS 中图分类号:TF274 文献标识码:A 文章编号:1674-098X(2018)09(b)-0002-02①作者简介:王洪一(1983,6—),男,黑龙江富锦人,硕士研究生,工程师,研究方向:电能计量。
电能量作为电力系统中重要的考核参数,具有十分核心的地位。
传统的电能量抄写无法完成自动采集,主要依靠人为在现场读表记录,浪费了大量的人力,而且填写繁琐,容易出错,数据汇总也十分困难,数据传递时间也很长。
随着智能电网的建设和科学技术手段的进步,自动电能采集系统在电力行业中已经得到极大的重视和广泛的应用,成为电力营销中对电能记录与考核所依赖的中坚力量。
本文主要研究电能采集终端通过RS485端口对现场三相三线制电子式电能表数据的实时采集过程,并将所得到的数字量通过GPRS模块,上发到上位机中,这种方式具有节约资源、采集迅速、汇总方便、安全可靠的特点,在智能电网的电能采集过程中,得到广泛的应用。
中国地质大学(武汉)_复合频率测试仪_徐雪梅
C2000参赛项目报告(命题组)题目:复合频率测试仪学校:中国地质大学(武汉)指导教师:叶敦范(教授)参赛队成员名单(含个人教育简历):徐雪梅、研究生、中国地质大学(武汉)陈珍、本科生、中国地质大学(武汉)袁铁柱、本科生、中国地质大学(武汉)复合频率测试仪徐雪梅陈珍袁铁柱(中国地质大学(武汉)机械与电子信息学院邮编430074)摘要:本设计基于TMS320F2808芯片,结合国内外文献中复合频率信号的检测方法,提出了一种频谱Sa函数比例查表法,通过两次采样以及相应的采样频率再修改,结合IQmath 技术进行高速的2048点的FFT运算,并实现了在频率谱中对于复合信号的主次信号的频率、幅度信息的快速、高分辨率计算,同时使用DSP2808的HRPWM功能结合CD4053模拟开关和6阶有源滤波电路实现高精度的复合信号的再生。
系统的测试结果证明我们的设计是可行的。
关键词:复合频率信号、Sa函数比例查表法、DSP、FFT、HRPWMDigital frequency meter of composite frequency signalXu Xuemei, Chenzhen, Yuan Tiezhu(College of Mechanical and Electronic Information, China University of Geosciences(Wuhan),430074) Abstract:According to composite frequency signal detection methods at home and abroad, the design of this paper, which is based on TM S320F2808 DSP chip, proposes a kind of Sa function proportion look-up table method of frequency spectrum. Through sampling twice and combing with IQmath technology, as well as appropriate sampling frequency revising, the experiment executed a high-speed FFT operation based on 2048 point and realized fast, high-resolution calculation of the frequency and amplitude information of primary and secondary signals included in the mixed signal. At the same time we realized high-precision regeneration of mixed-signal by using the HRPWM function of TMS320F2808 DSP chip, and analog switches of CD4053 chip as well as 6-band filter circuit. The system test results showed that our design was feasible.Key words: Composite frequency signal, Sa function proportion look-up table method, DSP, FFT, HRPWM1引言复合信号的频率、幅度的分析一直是分析化学、应用物理领域中长期存在的难题。
陀螺框架驱动系统设计
摘要
随着航空航天技术的发展,对航天器姿态调节精度的要求越来越高。控制 力矩陀螺作为航天器姿态控制系统的常用执行机构之一,对其输出力矩的速度 和精度要求也越来越高。陀螺框架驱动系统作为控制力矩陀螺的重要组成部分, 它的驱动性能直接影响着控制力矩陀螺的整体性能。课题结合具体项目,采用 永磁同步电机和矢量控制方式,对陀螺框架驱动系统进行了设计和实现。
1.1 课题来源及研究背景和意义....................................................................1 1.2 国内外研究现状 ......................................................................................3
课题首先介绍了控制力矩陀螺和控制力矩陀螺框架驱动系统的研究现状, 以及控制力矩陀螺框架驱动系统的发展趋势。其次采用不同的方式推导了永磁 同步电机的在不同坐标系下的数学模型及不同坐标系下的坐标变换关系,分析 了简化的空间矢量脉宽调制算法的原理,对其具体实现过程进行了深入探讨, 并在 MATLAB/Simulink 中仿真验证其原理和实现过程的正确性。
最后,选用相关半导体芯片,绘制了硬件原理图和 PCB 板,进行焊接调试, 搭建了驱动系统的硬件平台。基于搭建的硬件平台,在 CodeWarriorV8.3 集成开 发环境中,使用 C 语言对所设计的陀螺框架驱动系统进行软件编程实现,取得 了良好的实际运行效果。
关键词:控制力矩陀螺;框架;磁场定向矢量控制;PID 控制;MATLAB/Simulink
Finally, by selecting the relevant semiconductor chips, drawing the hardware schematic and PCB board, then welding and debugging, the drive system hardware platform is built. Based on the built hardware platform, in the CodeWarriorV8.3 integrated development environment(IDE), C language is used to realize the software programming of the control moment gyro gimbal driving system, and achieved good practical results
直流母线单电流传感器零点漂移误差自校正策略

第27卷㊀第7期2023年7月㊀电㊀机㊀与㊀控㊀制㊀学㊀报Electri c ㊀Machines ㊀and ㊀Control㊀Vol.27No.7Jul.2023㊀㊀㊀㊀㊀㊀直流母线单电流传感器零点漂移误差自校正策略申永鹏1,㊀王前程1,㊀王延峰1,㊀梁伟华1,㊀孟步敏2(1.郑州轻工业大学电气信息工程学院,河南郑州450000;2.湘潭大学信息工程学院,湖南湘潭411100)摘㊀要:为了研究三相两电平逆变器中直流母线单电流传感器零点漂移对相电流重构精确度的影响,阐明了直流母线单电流传感器相电流重构原理,对比了多电流传感器与单电流传感器零点漂移误差,揭示了零点漂移误差产生的原因及扩大效应的产生机理,基于插入互补有效电压矢量代替零矢量的空间矢量脉冲宽度调制方法,提出了零点漂移误差自校正策略㊂分析了各扇区电流观测窗口时长,利用互补有效电压矢量动态电流双采样,实现了相电流重构与电流零点漂移量的自检测和自校正㊂搭建了基于TMS320F28035型DSP 为电驱动控制器的实验平台,在额定转速以内的工况下,自校正后的重构相电流误差小于3.56%,表明了所提误差自校正策略能为控制系统提供可靠的重构电流㊂关键词:三相两电平逆变器;直流母线;单电流传感器;互补矢量;相电流重构;误差自校正DOI :10.15938/j.emc.2023.07.014中图分类号:TM341文献标志码:A文章编号:1007-449X(2023)07-0133-10㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀收稿日期:2021-08-20基金项目:国家自然科学基金(52177068,61803345,51807013);河南省科技攻关项目(202102210303)作者简介:申永鹏(1985 ),男,博士,副教授,研究方向为电动汽车动力系统驱动与控制㊁能量管理与优化;王前程(1996 ),男,硕士研究生,研究方向为电动汽车动力系统驱动与控制;王延峰(1973 ),男,博士,教授,研究方向为智能电器与信息处理;梁伟华(1988 ),男,博士,讲师,研究方向为电力电子变化技术;孟步敏(1987 ),男,博士,讲师,研究方向为电动汽车整车控制㊂通信作者:王前程Self-correction strategy of zero-point drift error of DC bus singlecurrent sensorSHEN Yongpeng 1,㊀WANG Qiancheng 1,㊀WANG Yanfeng 1,㊀LIANG Weihua 1,㊀MENG Bumin 2(1.College of Electrical and Information Engineering,Zhengzhou University of Light Industry,Zhengzhou 450000,China;2.School of Information Engineering,Xiangtan University,Xiangtan 411100,China)Abstract :In order to study the influence of the zero drift of the DC bus single current sensor on the phase current reconstruction accuracy in the three-phase two-level inverter,the principle of the phase current reconstruction of the DC bus single current sensor was clarified,and the multi-current sensor and the sin-gle current sensor were compared.The zero drift error reveals the cause of the zero drift error and the mechanism of the amplification effect.Based on the space vector pulse width modulation method of inser-ting complementary effective voltage vectors instead of zero vectors,a self-correction strategy for zero drift errors was proposed.The current observation window duration of each sector was analyzed,and the phase current reconstruction and the self-detection and self-correction of the current zero-point drift were real-ized by using the complementary effective voltage vector dynamic current double sampling.A control sys-tem experiment platform with TMS320F28035DSP as the electric drive controller was built.Under the working conditions within the rated speed,the error of the reconstructed phase current after self-calibra-tion is less than 3.56%,which shows that the proposed error self-calibration strategy can provide reliablereconstructed current for the control system.Keywords:three-phase two-level inverter;DC bus;single current sensor;complementary vector;phase current reconstruction;error self-correction0㊀引㊀言交流电驱动控制系统在现代工业装备中运用广泛,精准并实时地获取电压源逆变器(voltage sourceinverter,VSI)输出的三相电流信息是保证控制系统可靠性的重要前提[1-4]㊂传统电流采集是将多个传感器安放在逆变器输出侧和直流母线侧以得到三相电流值并对直流母线形成过电流保护㊂但多个传感器会因其参数不一致对控制精确度产生影响,同时增加系统重量㊁体积及费用㊂单电流传感器(single current sensor,SCS)相电流重构技术能够有效避免上述问题,近年来被广泛研究㊂SCS相电流重构技术利用安装在直流母线侧的单个电流传感器,通过多时刻动态采集直流信息,并依照与三相电流映射关系,实现相电流重构㊂然而,控制系统中的电压基准芯片㊁电流传感器㊁运算放大器等装置存在零点漂移现象,将导致电流采样出现误差,并因误差扩大效应而影响电流重构精确度㊂精确的相电流测量对电机控制系统来说至关重要,文献[5]分析了电流测量误差对电流控制器中相电流和输出电压的影响,提出了一种误差补偿策略,在不需要额外的硬件设备基础上利用电流控制器的基准电压对偏置和缩放误差分别进行补偿㊂该技术需要至少两个电流传感器来获取三相电流信息,多传感器的不一致性会影响采样精确度㊂文献[6]根据直流输出电压纹波特性结合带通和低通滤波器来估计直流偏移和缩放误差,提出一种电流测量误差补偿方案,能够有效地抑制电压和电流测量误差的影响㊂然而,该方法无法确定控制系统中故障传感器的具体安装位置㊂针对单传感器相电流重构方法,文献[7]基于修改逆变器开关状态,在过调制区域完成相电流重构,改变后的开关脉冲不再保持对称,相电流发生较大畸变㊂接着,文献[8]分析了实测相电流与重构相电流之间重构误差产生的各类原因并提出相应解决方案,但无法对直流电流偏置误差实时计算㊂文献[9]使用检测电压注入法,通过将两个相对的有效矢量组合,插入空间矢量脉冲宽度调制(space vector pulse width modulation, SVPWM)脉冲用以检测和消除直流母线电流传感器的偏置误差㊂文献[10]提出了一种新型SCS算法(测量矢量插入法)用于重构相电流,该算法使用有源电压矢量克服了不可观测盲区问题,同时对机器性能和运行范围的影响最小㊂接着,文献[11]将测量矢量插入算法整合到闭环电流调节器中,该调节器将虚拟有源电阻状态反馈引入同步坐标系电流调节器中,消除了因测量矢量对控制器引起的干扰㊂文献[9-11]所提方法引入额外的开关动作,增加开关损耗㊂文献[12]提出了一种零电压矢量采样方法,可以在不修改PWM信号的情况下将低调制区域和扇区边界区域中的电流重构盲区移向空间矢量六边形的边界,避免了复杂的算法和开关次数的增加,有利于永磁同步电机的驱动性能㊂在此基础上,文献[13]采用零电压矢量采样法来实现对中小功率电压源逆变器开路故障诊断,重构的三相电流用于生成可以检测和定位开关故障的诊断变量㊂文献[14]讨论了多个采样位置的优化选择,以降低所提SCS耦合多个可用位置策略的实际实施难度㊂文献[12-14]中所提出的相电流重构方法无法利用分流电阻获取电流信息,且增加了被测支路间电流信号的干扰㊂本文阐明直流母线单电流传感器相电流重构原理,对比多电流传感器与单电流传感器零点漂移误差,揭示零点漂移误差产生的原因及扩大效应的产生机理,基于插入互补有效电压矢量代替零矢量的空间矢量脉冲宽度调制方法,提出零点漂移误差自校正策略㊂分析各扇区电流观测窗口时长,利用互补有效电压矢量动态电流双采样,实现相电流重构与电流零点漂移量的自检测和自校正㊂在搭建的控制系统实验平台上验证所提误差自校正策略能为控制系统提供可靠的重构电流㊂1㊀单电流传感器误差扩大效应1.1㊀直流母线SCS采样基本原理定义实现电流信息准确采集所需最短时长为最小采样时间T min,其大小主要由硬件电路性能决定,如图1所示㊂图中:t d表示死区时间;t on表示功率开关器件延迟导通时间;t r表示上升时间;t A/D表示数模转换时间;t sr表示振荡时间;t stable表示电流稳定时431电㊀机㊀与㊀控㊀制㊀学㊀报㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第27卷㊀间[15]㊂T min 可表示为T min =t d +t on +t r +t sr +t A /D ㊂(1)图1㊀理想与实测电流脉冲波形Fig.1㊀Ideal and actual current pulse waveforms三相两电平VSI 驱动系统如图2所示㊂同相桥臂高低两个开关导通状态以Q x (x =a,b,c)表示㊂高开关管导通,低开关管关断,以Q x =1表示;反之,以Q x =0表示㊂如图3所示,用V i =(Q a ,Q b ,Q c )代表电压空间矢量8类开关组合状态(i =0,1,2,3,4,5,6,7)㊂图3为基本电压矢量合成调制区域,定义不可观测区域包含扇区边界和低调制区域㊂在SVPWM 策略下,当参考电压矢量V ref 位于不可观测区域时,有效电压矢量作用时长小于T min ,导致采样不准确㊂图2㊀VSI 驱动系统拓扑Fig.2㊀VSI drive systemtopology图3㊀基本电压矢量合成调制区域Fig.3㊀Basic voltage vector synthesis modulation regionVSI 负载相电流i a ㊁i b 和i c 与直流母线电流i dc 之间的关系如表1所示㊂在单个SVPWM 调制周期内对直流母线电流进行两次采样,若有效电压矢量的作用时间大于T min ,则其对应电流i dc 能够被精确获取,依照表1即可得到对应两相电流值㊂根据基尔霍夫电流定律可计算出余相电流值,即i a +i b +i c =0㊂(2)表1㊀直流母线电流与开关状态关系Table 1㊀Relationship between DC bus current andswitch state开关状态100101001011010110000111母线电流+i a-i b+i c-i a+i b-i c以Ⅰ扇区为例,SVPWM 直流母线SCS 采样原理如图4所示㊂图中上半部分表示三相SVPWM 脉冲,下半部分为对应直流母线电流,两个有效电压矢量V 1(100)和V 2(110)分别对应电流观测窗口时长T spl1和T spl2㊂当T spl1和T spl2同时大于T min 时,通过对电流i dc 的采样可得到两相电流信息i a 和-i c ,进而依照式(2)重构出三相电流㊂然而,在不可观测区域,V 1和V 2至少有一个会因其作用时间过短而导致对应电流观测窗口时长小于T min ,此时电流i dc 不能够被准确地采集,致使相电流重构误差变大㊂图4㊀SVPWM 直流母线SCS 采样原理(Ⅰ扇区)Fig.4㊀SVPWM DC bus SCS sampling principle (sectorⅠ)1.2㊀误差的分析及其扩大效应直流母线采样零点漂移误差主要由霍尔效应电流传感器㊁运算放大器造成的零点漂移和电压基准芯片造成的电压基准漂移组成㊂受环境温度㊁封装应力㊁内部元件参数不一致等因素的影响,霍尔效应531第7期申永鹏等:直流母线单电流传感器零点漂移误差自校正策略电流传感器㊁运算放大器和电压基准芯片存在零点漂移现象,输出信号将偏离理论值㊂令VSI 负载三相电流由I a ㊁I b 和I c 表示,未发生零点漂移前直流母线电流值为I dc_m ,零点漂移造成的电流漂移量用I e 表示㊂以A 相电流为例,基本电压矢量(100)和(011)分别对应电流值为i a 和-i a ,利用直流母线SCS 完成相电流重构时,A 相实际电流值分别为I a1或I a2,若I a >0,则:I a =I a1=I dc_m +I e (100);Ia2=-(-I dc_m +I e )(011)㊂{(3)由上式得I a1-I a2=2I dc_m ,即实际测量计算后误差将扩大至2I e ㊂当I a <0时,误差同样为2I e ,将此现象称之为误差扩大效应㊂SCS 误差扩大效应如图5所示,γ为电流噪声,与多电流传感器零点漂移误差相比,利用SCS 实现相电流重构时,零点漂移产生的误差是前者的2倍㊂图5㊀SCS 电机控制系统误差扩大效应Fig.5㊀Error expansion effect of SCS motor control system2㊀零点漂移误差自校正策略2.1㊀误差自校正SVPWM 发波方法在整个空间矢量平面的扇区边界和低调制区域(自校正区域)使用主动零状态脉冲宽度调制方法(active zero space vector pulse width modulation,AZS-VPWM),剩余区域使用SVPWM 方法,AZSVPWM 利用两个相邻有效电压矢量和两个具有相同作用时间的互补有效电压矢量来合成参考电压矢量V ref ㊂如图6所示,以Ⅰ扇区为例,在自校正区域内,传统SVPWM 开关顺序中的V 0和V 7被互补有效电压矢量V 3和V 6代替㊂该过程中零矢量作用时间T 0被平均分配到两个互补矢量,即T 0/2=T 3=T 6,T x 为矢量作用时长(x =3,6),则零电压矢量为V 0T 0=V 3T 02+V 6T 02㊂(4)图6㊀AZSVPWM 参考电压矢量合成原理(Ⅰ扇区)Fig.6㊀AZSVPWM reference voltage vector synthesisprinciple (sector Ⅰ)由伏秒平衡理论得参考电压矢量V ref 可由4个基本电压矢量合成,即V ref (cos θ+jsin θ)T s =V 1T 1+V 2T 2+V 3T 3+V 6T 6㊂(5)其中:θ表示V ref 在空间矢量平面的旋转角度;T s 表示调制系统的载波周期㊂AZSVPWM 各基本电压矢量的合成时段可表示为:T 1=23πT s M [sin(π3+θ)-sin(θ)];T 2=2πT s M [3sin(π6+θ)-3sin(π3+θ)];T 3=T 6=T s 2-3πT s M sin(π3+θ);M =πV ref 2U dc ㊂üþýïïïïïïïïïï(6)其中M 表示调制度㊂参考电压矢量V ref 位于Ⅱ~Ⅵ扇区时,θ须减去(N -1)π/3,N 为扇区序号(N =1,2,3,4,5,6)㊂该方法在整个空间矢量平面是线性的,开关顺序如表2所示,可见插入互补有效电压矢量作用效果与零矢量相同㊂通过搭建MATLAB /Simulink 仿真模型,得到SVPWM 和AZSVPWM 两种方法下电流观测窗口(T pl1㊁T pl2和T pl3㊁T pl4)随扇区变化曲线如图7所示㊂631电㊀机㊀与㊀控㊀制㊀学㊀报㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第27卷㊀图7(a)为各扇区切换时刻,对应图7(b)中T pl1或T pl2在扇区边界处小于T min ㊂利用互补有效电压矢量替代零矢量后,得到电流观测窗口T pl3和T pl4如图7(c)所示,在整个空间矢量平面内,T pl3和T pl4均大于T min ,满足了一个SVPWM 周期内重构和校正3次电流采样运行和处理时间所需要求㊂表2㊀AZSVPWM 各扇区开关动作顺序Table 2㊀AZSVPWM switching sequence of each sector模式开关顺序Ⅰ6123-3216Ⅱ4321-1234Ⅲ2345-5432Ⅳ6543-3456Ⅴ5461-1645Ⅵ2165-5612图7㊀扇区对应电流观测窗口时长Fig.7㊀Duration of current observation window以扇区I 为例,图8描述了AZSVPWM 技术的开关脉冲产生过程㊂当V ref 处于不可观测区域时,根据AZSVPWM 和SVPWM 中开关脉冲占空比的相互关系,可以得到开关动作时间,如表3所示㊂K Mq x 和K Sq x (x =1,2,3)分别表示AZSVPWM 和SVPWM 中各功率开关器件动作时间㊂之后根据表4给动作寄存器赋值,完成整个开关脉冲的产生过程㊂P CLC /P SET ㊁U CLC /U SET 和D CLC /D SET 分别表示当计数器等于周期值㊁比较值A 和比较值B 时,输出低(或高)电平㊂整个过程中开关脉冲电流采样窗口时长相对延长,保证电流被精确采集,同时通过调整开关脉冲占空比的大小对输出电流进行实时控制㊂图8㊀AZSVPWM 技术下开关脉冲产生过程Fig.8㊀Process of switching pulse generation underAZSVPWM technology图8中:epx.A 为比较寄存器A (counter-com-pare A,CMP)的值,x =1,2,3;K Sq x /K Mq x 为动作时间,x =1,2,3㊂表3㊀AZSVPWM 各扇区开关动作时间变换过程Table 3㊀AZSVPWM each sector switching action schedule扇区开关动作时间变换算法I &IV K Mq1=K Sq3K Mq2=K Sq2K Mq3=K Sq1II &V K Mq1=K Sq1K Mq2=K Sq3K Mq3=K Sq2III &VIK Mq1=K Sq2K Mq2=K Sq1K Mq3=K Sq3互补矢量插入后AZSVPWM 脉冲及其采样电流如图9所示(以Ⅵ扇区和I 扇区边界为例),其中i ec1和i ec2为自校正电流,i rc1和i rc2为重构电流㊂在一个AZSVPWM 周期进行重构和校正3次电流采样,每个扇区自校正区域使用的有效电压矢量和对应自校正电流如表5所示,在自校正过程中可以得到3个电流值㊂AZSVPWM 和SVPWM 两种调制方式之间能够平稳渡,不存在脉冲错位现象,尽可能地减少因731第7期申永鹏等:直流母线单电流传感器零点漂移误差自校正策略互补矢量插入所引起的相电流总谐波失真的增加㊂表4㊀AZSVPWM 动作寄存器设定方式Table 4㊀AZSVPWM action register assignment扇区动作寄存器赋值I 和IVP SET -D CLC -U SETP CLC -D SET -U CLC P SET -D CLC -U SET II 和VP CLC -D SET -U CLC P SET -D CLC -U SET P SET -D CLC -U SET III 和VIP SET -D CLC -U SET P SET -D CLC -U SET P CLC -D SET -UCLC 图9㊀AZSVPWM 开关脉冲和采样时刻(I 扇区)Fig.9㊀AZSVPWM switching pulse and samplingtime (sector I )表5㊀各扇区有效矢量及测量电流Table 5㊀Effective vector and measured currentper sector扇区有效矢量测量电流重构电流自校正电流ⅠV 1㊁V 2㊁V 3㊁V 6前:+i a ㊁-i b +i b ㊁-i b 后:-i b ㊁-i c +i b ㊁-i b ⅡV 1㊁V 2㊁V 3㊁V 4前:+i a ㊁-i c+i a ㊁-i a 后:-i a ㊁+i b +i a ㊁-i a ⅢV 2㊁V 3㊁V 4㊁V 5前:+i b ㊁-i c +i c ㊁-i c 后:+i c ㊁-i a+i c ㊁-i cⅣV 3㊁V 4㊁V 5㊁V 6前:-i a ㊁+i b +i b ㊁-i b 后:-i b ㊁+i c +i b ㊁-i b ⅤV 1㊁V 4㊁V 5㊁V 6前:+i c ㊁-i a+i a ㊁-i a 后:+i a ㊁-i b +i a ㊁-i a ⅥV 1㊁V 2㊁V 5㊁V 6前:+i c ㊁-i b +i c ㊁-i c 后:+i a ㊁-i c+i c ㊁-i c 2.2㊀自校正策略本文采用AZSVPWM 方法对直流母线零点漂移产生的误差进行校正,在一个载波周期内,对插入的互补电压矢量进行采样,得到采样电流I 1和I 2㊂则:I 1=I dc_m +I e ;I 2=-I dc_m +I e ㊂}(7)实际电路中,由于零点漂移的存在,由式(7)可得I 1+I 2=2I e ㊂(8)根据式(8)可得到漂移量I e ,进而计算出校正后的相电流电流I c1㊁I c2为:I c1=I 1-I e ;I c2=I 2-I e ㊂}(9)AZSVPWM 自校正策略通过在一个SVPWM 载波周期内对插入互补电压矢量进行双重采样,实现了漂移量I e 的检测,从而完成了重构电流自校正㊂校正后的实际电流和重构电流如图10所示,由于3次电流采样不同步以及A /D 转换时间的存在,重构相电流与实际电流将产生θ角的相位误差㊂图10㊀AZSVPWM 自校正策略下实际与重构电流误差情况Fig.10㊀Actual and reconstructed current error underAZSVPWM self-correction strategy3㊀实验验证整个电驱动控制系统原理如图11所示㊂对应实验平台如图12所示,控制芯片采用德州仪器公司的TMS320F28035型DSP,载波频率恒定在10kHz,使用型号为MODVK48T17D200K 的三相感应电机作为系统驱动电机,其参数如表6所示㊂使用力科公司型号为MDA805A 的电驱动分析仪来完成实验数据的采集与分析㊂根据实验平台硬件设备计算最小采样时间T min =6.33μs,其中:t dead =2.00μs,t A /D =3.33μs,t on +t rise +t sr =1.00μs㊂831电㊀机㊀与㊀控㊀制㊀学㊀报㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第27卷㊀图11㊀AZSVPWM 电驱动控制系统原理Fig.11㊀Principle of AZSVPWM electric drive controlsystem图12㊀电驱动控制实验平台Fig.12㊀Electric drive control experiment platform表6㊀系统驱动电机参数Table 6㊀System drive motor parameters㊀㊀㊀参数数值额定功率P /W 184额定频率f /Hz 60额定电压U /V 208-230/460额定转速n /(r /min)1721各扇区PWM 信号㊁采样脉冲和直流母线电流波形如图13所示,可以看出所提AZSVPWM 自校正策略利用非零互补有效电压矢量替代零矢量消除了不可观测区域,且采样脉冲跟随SVPWM 波形占空比的变化实时调整触发沿位置,各采样时刻均大于T min ,对应母线电流平稳,保证了采样准确进行㊂在起动过程中,电机实测和重构三相电流曲线如图14所示㊂初始阶段实测相电流值为零,但由于零点漂移现象的存在,未校正时重构相电流值不为零且在漂移量附近波动㊂起动阶段存在过电流现象,当M =0.6电机平稳运行在转速1721r /min 时,实测相电流和重构相电流如图15所示㊂图13㊀误差自校正区域各扇区开关脉冲及对应采样时刻Fig.13㊀Switching pulses of each sector in error self-correction area and corresponding sampling time931第7期申永鹏等:直流母线单电流传感器零点漂移误差自校正策略图14㊀电机起动过程实测和重构相电流曲线Fig.14㊀Measured and reconstructed phase current curves during motorstarting图15㊀AZSVPWM 实测和重构相电流(M =0.6,1721r /min )Fig.15㊀AZSVPWM measured and reconstructed phasecurrent (M =0.6,1721r /min )令实测相电流为i x _ac ,重构相电流为i x _rc (x =a,b,c)㊂在整个电机运行矢量平面内,电流能够平稳过渡且在不可观测区域相电流能够准确重构㊂因分时采样和重构算法运行依照时间顺序进行,导致实测和重构相电流波形之间存在相位差㊂实测与重构电流之间的重构误差e 可由下式计算:e =i x _ac -i x _rci x _acˑ100%㊂(10)以A 相为例,图16和图17分别展现了误差自校正前后重构相电流㊁实测相电流及其重构误差曲线,由式(10)计算得出校正后的最大重构误差由校正前的4.17%下降为3.42%㊂图18为低速低调制度(120r /min,M =0.3)下AZSVPWM 方法重构和实测电流波形,此时重构电流仍保持良好的正弦曲线,能够为控制系统提供可靠的电流信号㊂该工况下重构误差曲线如图19所示,校正后重构误差小于3.56%㊂在工频50Hz 供电环境下,所提误差自校正策略得出实测和重构相电流波形如图20所示,对应误差曲线如图21所示,可以看出在该工况下实测和重构相电流曲线保持良好的正弦状态,且重构误差低于3.51%,整个控制系统运行稳定㊂图16㊀A 相实测和重构相电流波形及其误差曲线(无校正)Fig.16㊀Phase A measured and reconstructed phasecurrent waveform and its error curve (with-out correction)图17㊀A 相实测和重构相电流波形及其误差曲线(有校正)Fig.17㊀Phase A measured and reconstructed phasecurrent waveform and its error curve (with correction)图18㊀AZSVPWM 实测和重构相电流(M =0.3,120r /min )Fig.18㊀Measured and reconstructed phase current ofAZSVPWM (M =0.3,120r /min )41电㊀机㊀与㊀控㊀制㊀学㊀报㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第27卷㊀图19㊀低速下A 相电流误差曲线Fig.19㊀Phase A current error curve at lowspeed图20㊀工频50Hz 下实测和重构相电流(M =0.6,1500r /min )Fig.20㊀Measured and reconstructed phase current atpower frequency 50Hz (M =0.6,1500r /min)图21㊀工频50Hz 下实测和重构相电流误差曲线Fig.21㊀Measured and reconstructed phase current er-ror curve at power frequency 50Hz图22和图23分别验证了在动态工况下,所提AZSVPWM 方法重构相电流的准确性㊂电机加减速过程中,重构电流能够实时跟随实测电流平稳变化㊂加速时A 相电流重构误差曲线如图24所示,重构误差控制在3.31%以内㊂验证了所提AZSVPWM 方法在动态环境下的稳定性㊂当调制度M 由0.7变为0.25时,对应实测和重构相电流如图25所示,瞬时变换时刻电流发生畸变,之后能够快速恢复平稳㊂以上过程验证了AZS-VPWM 方法在动态工况下能够对电机进行实时控制,保证了整个控制系统的可靠性和稳定性㊂图22㊀加速过程中AZSVPWM 方法实测和重构相电流Fig.22㊀AZSVPWM method measures and reconstructsphase current duringacceleration图23㊀减速过程中AZSVPWM 方法实测和重构相电流Fig.23㊀AZSVPWM method measures and reconstructsphase current duringdeceleration图24㊀AZSVPWM 加速过程中A 相重构误差曲线Fig.24㊀A-phase reconstruction error curve during AZSVPWMacceleration图25㊀调制度突变时实测和重构相电流Fig.25㊀Measurement and reconstruction of the phasecurrent when the modulation degree changes suddenly4㊀结㊀论针对直流母线单传感器零点漂移误差问题,本141第7期申永鹏等:直流母线单电流传感器零点漂移误差自校正策略文揭示了零点漂移误差产生的原因及其扩大效应,基于插入互补有效电压矢量代替零矢量的SVPWM 调制方法,提出了零点漂移误差自校正策略,利用互补有效电压矢量动态电流双采样,实现了电流零点漂移量的自检测和自校正㊂其主要效果如下:1)AZSVPWM产生的SVPWM波在调制周期内相互对称,继承了SVPWM优越的动静态特性; 2)所提误差自校正策略减弱了零点漂移对电流重构精确度的影响,降低了重构误差㊂额定转速下(1721r/min,M=0.6)相电流重构误差由原来的4.17%降低至3.42%,低速下(120r/min,M=0.3)相电流重构误差小于3.56%㊂参考文献:[1]㊀王旭东,杨传江.逆变器故障容错控制策略研究[J].电机与控制学报,2020,24(11):37.WANG Xudong,YANG Chuanjiang.Tolerant control strategy for inverter faults[J].Electric Machines and Control,2020,24(11):37.[2]㊀刘和平,董治平,邱彬彬,等.一种低压电动汽车用逆变器非线性因素的新型补偿方法[J].电机与控制学报,2020,24(9):30.LIU Heping,DONG Zhiping,QIU Binbin,et pensation method for nonlinear factors of inverter for low voltage electric vehi-cle[J].Electric Machines and Control,2020,24(9):30. [3]㊀陈虹,赵明星,赵海艳,等.三相逆变器的随机双PID组合优化方法[J].电机与控制学报,2018,22(10):1.CHEN Hong,ZHAO Mingxing,ZHAO Haiyan,et binato-rial optimization control strategy for a three-phase inverter with ran-dom double PID[J].Electric Machines and Control,2018,22(10):1.[4]㊀黄辉先,韩建超,刘湘宁,等.逆变器驱动电机系统共模电压抑制模型预测控制[J].电机与控制学报,2018,22(9):84.HUANG Huixian,HAN Jianchao,LIU Xiangning,et al.Model predictive control to suppress common mode voltage of inverter drive motor system[J].Electric Machines and Control,2018,22(9):84.[5]㊀KIM M,SUL S K,LEE pensation of current measurementerror for current-controlled PMSM drives[J].IEEE Transactions on Industry Applications,2014,50(5):3365.[6]㊀TRINH Q N,WANG P,TANG Y,et pensation of DC off-set and scaling errors in voltage and current measurements of three-phase AC/DC converters[J].IEEE Transactions on Power Elec-tronics,2017,33(6):5401.[7]㊀马鸿雁,孙凯,魏庆,等.变频调速系统过调制时的相电流重构方法[J].清华大学学报,2010,50(11):1757.MA Hongyan,SUN Kai,WEI Qing,et al.Phase current recon-struction for AC motor adjustable-speed drives in the over-modula-tion method[J].Journal of Tsinghua University,2010,50(11):1757.[8]㊀马鸿雁,孙凯,魏庆,等.PWM逆变器相电流重构研究与误差分析[J].电工技术学报,2011,26(1):108.MA Hongyan,SUN Kai,WEI Qing,et al.Phase current recon-struction method for PWM inverter and error analysis[J].Electric Machines and Control,2011,26(1):108.[9]㊀LU J,HU Y,CHEN G,et al.Mutual calibration of multiple cur-rent sensors with accuracy uncertainties in IPMSM drives for elec-tric vehicles[J].IEEE Transactions on Industrial Electronics, 2019,67(1):69.[10]㊀KIM H,JAHNS T M.Phase current reconstruction for AC motordrives using a DC link single current sensor and measurementvoltage vectors[J].IEEE Transactions on Power Electronics.2006,21(5):1413.[11]㊀KIM H,JAHNS T M.Current control for AC motor drives using asingle DC-link current sensor and measurement voltage vectors[J].IEEE Transactions on Industry Applications,2006,42(6):1539.[12]㊀XU Y,YAN H,ZOU J,et al.Zero voltage vector samplingmethod for PMSM three-phase current reconstruction using singlecurrent sensor[J].IEEE Transactions on Power Electronics,2016,32(5):3797.[13]㊀YAN H,XU Y,ZOU J,et al.A novel open-circuit fault diagno-sis method for voltage source inverters with a single current sensor[J].IEEE Transactions on Power Electronics,2018,33(10):8775.[14]㊀TANG Q,SHEN A,LI W,et al.Multiple-positions-coupledsampling method for PMSM three-phase current reconstructionwith a single current sensor[J].IEEE Transactions on Power E-lectronics,2019,35(1):699.[15]㊀SHEN Y,ZHENG Z,WANG Q,et al.DC bus current sensedspace vector pulse width modulation for three-phase inverter[J].IEEE Transactions on Transportation Electrification,2020,7(2):815.(编辑:刘素菊)241电㊀机㊀与㊀控㊀制㊀学㊀报㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第27卷㊀。
基于DSP56F805的数字多联变频空调控制系统设计
基于DSP56F805的数字多联变频空调控制系统设计胡万强;董中奎【摘要】The digital control system of multi-connected inverter air-conditioner based on DSP56F805 is in- troduced in the paper. Meanwhile, the construction and function of main circuits and the software design are analyzed in detail.%研究了以DSP56F805控制芯片为核心的数字多联变频空调控制系统,并详细阐述了各个主要电路的组成与作用,最后对系统软件设计进行了说明.【期刊名称】《许昌学院学报》【年(卷),期】2012(031)002【总页数】6页(P45-50)【关键词】多联变频空调;ACI电机;BLDC电机;Fuzzy_PID;数据监测【作者】胡万强;董中奎【作者单位】许昌学院电气信息工程学院,河南许昌461000;郑州市第一中学,河南郑州450007【正文语种】中文【中图分类】TP273随着人们生活水平的不断提高,住房环境的不断改善,传统的一拖一空调(即一个室外机,一个室内机)已逐渐不能满足人们的要求.而多联变频空调采用一个室外机,可根据用户需要配置不同的室内机,既可实现集中控制,又可实现分布控制,控制操作灵活,再加上国家能源政策、住房环境政策的颁布和实施,新型的多联变频空调必将成为家用空调一个新的发展方向.本文主要针对一拖三空调系统(即一个室外机,三个室内机),设计了一个基于DSP56F805的数字多联变频空调控制系统,它的主要原理是根据室内和室外空调的运行情况,利用DSP56F805特有的双PWM(即脉冲宽度调制)电机控制功能,以此来实现对室内、室外电机的变频调速控制.另外,利用DSP56F805双异步串行通讯(SCI)口,将一些主要数据如各重要监测点的温度,电子膨胀阀的开口度,压缩机和风机转速,各室内机和系统的设定与实际运行状态等传送到监测计算机进行处理,系统原理图如图1所示[1].数字多联空调控制系统的主要功能是进行变频压缩电机及电子膨胀阀控制,监测一些重要数据.其硬件包括控制芯片电路、电源及驱动电路两部分.控制芯片电路主要进行数据处理,与上位机进行通讯等.它包括:DSP56F805芯片及周边电路、CAN控制通讯接口电路、RS232通讯接口电路、JTAG接口电路等. 电源及驱动电路主要完成室内外机的控制功能,它可以根据室内外机的运行工况,调节变频压缩机转速,同时调节电子膨胀阀的开启度,并完成与各室内机的数据交换.其硬件电路主要包括:(1)电流、电压检测电路;(2)外部开关信号检测电路;(3)与室内机通讯电路;(4)与集中控制面板的通讯电路;(5)温度检测电路;(6)电子膨胀阀驱动电路;(7)继电器驱动电路;(8)串行EEPROM读写电路;(9)测试功能设定电路等.1.2.1 电压、电流检测电路如图2所示.电压采样是利用直流电压分压得到相应的信号.直流电压经过R111~R113、C71分压滤波,采样后的信号直接进入DSP芯片内部的12位A/D通道转换.为了空调系统电流保护功能,必须对电流值进行精确采样.本系统采用电流互感器采样,其电路结构如图3所示。
TMEIC主传动
365
频率(基速)
Hz
7.5
(高速)
Hz
18.25
额定电压
V
3150
额定电流
A
1110
功率因子
1.0
磁场额定电压
V
90
磁场额定电流
A
780
过载பைடு நூலகம்
%
100%-连续. (B rise)
115%-连续
150%-180 s
200%-瞬间
(跳闸)
225%
保护
-
IP44
绝缘
-
F
温升
B (100%负载)
冷却
-
3.1
3.1.1三电平逆变器工作原理
图3.1显示了三电平IEGT逆变器的工作原理:
在下面的示意图中,只表示了三相电源中的一相回路上的四个IEGT的工作状态,通过它们的通断来获得比较理想的正弦波电压,带箭头的划线为回路中电流。Q1~Q4分别表示4个IEGT,ON、OFF表示IEGT的通、断状态,与IEGT反并联的4个二极管为续流二极管;D5、D6为钳位二极管;一个标准的IEGT组件还应有DC钳位浪涌电路,它由二极管、电容、电阻等组成,以下示意图中没有表示出来。
术语条目
描述
3-level inverter
具有三电平输出的逆变器,三电平:(+)、(0)、(-)
CTR circuit board /
MB circuit board
主控制电路板
GDM circuit board
门极驱动板
IEGT
注入增强栅晶体管
MCCB
模壳式回路开关
PP7
Toshiba32位处理器
SM
经济高效的矢量控制驱动

经济高效的矢量控制驱动摘要:本文描述了基于飞思卡尔mc56f8013/23数字信号控制器的三相ac感应电机矢量驱动解决方案。
关键词:交流感应电机;矢量控制驱动;mc56f8013/23;单旁路电流传感简介由于能效、环境问题及遵守新的能耗规定的必要性,对节能型工业和家用电器的需求最近也在攀升。
这些规定迫使人们为洗衣机、空调压缩机系统和风机等电器开发节能电机。
据估计,电动机消耗的电力占工业应用消耗的总电力的70%以上,美国电力研究协会研究显示,超过60%的工业电机以低于它们的额定负荷容量运行。
交流感应电机(acim)在工业和消费电子中的流行有很多原因(见图1)。
它们非常简便(它们没有刷子),不但制造成本低,而且功能强大,几乎不需要维护。
它们的生产已经有一些年头,因此它们的构造极度优化。
在过去,这类电机的运行一直不需要速度控制,而且为了达到理想的结果而频繁启动和停止。
这一过程使用的大约50%的电力都被浪费。
现在,人们在考虑很多新的减少acim的电力消耗的方法,包括新的电机效率技术。
利用模拟电机电路的数字控制,系统成本和功耗可以大大降低。
本文描述了基于飞思卡尔mc56f8013/23数字信号控制器(dsc)的三相ac感应电机矢量驱动解决方案,为消费和工业电机驱动充分利用经济高效的解决方案的优势。
三相交流感应电机acim是旨在从三相交流电源中运行的旋转电机。
每个定子的内部外设中的插槽都包含一个三相绕组。
每个绕组中的顺序都进行分配,这样定子绕组中的电流就在气隙的外设周围产生一个近似正弦曲线分布的磁通密度。
当时间呈正弦曲线分布、但又以120度交错放置在相位中的三个电流流经三个对称放置的绕组时,就会产生放射状气隙绕组磁通密度,它们也呈正弦曲线分布在气隙周围,以相当于定子电流角频率的角速度旋转。
最常见的感应电机类型有一个鼠笼转子,其中,铝导线或铝条铸入转子外设的插槽中。
转子的两端均使用铸铝端环形成铝导线或铝条短路,铸铝端环也可用作风机。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
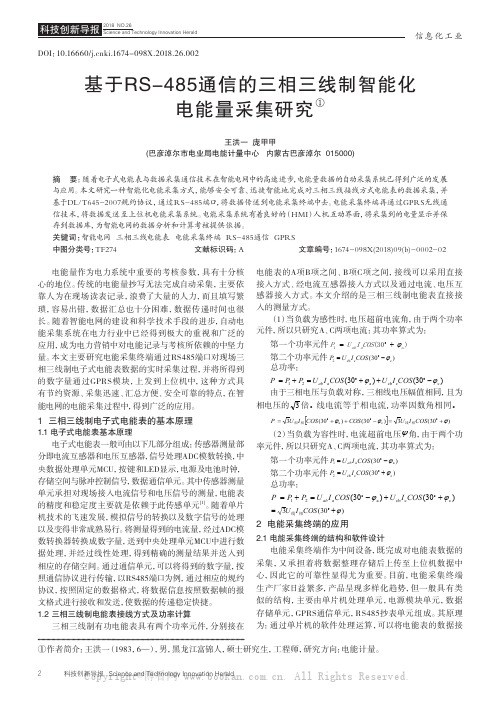
若初始时转子处于静止状态,由定子三相交流电产生的气隙磁场将从转子导条上扫过,在转子导 条上产生了感应电压,进而在短路的转子中感应出感应电流。气隙磁链和转子感应电流相互作用 产生转矩。感应电机典型的转矩转速曲线如图 3所示。 在电机以同步转速运行时,转子中不可能 产生感应电流,因此,也不可能产生转矩,在任何其他转速������������时,转速差������������ − ������������称为滑差。
fs
定子磁链同步频率
fslip
滑差频率
Pp
电机极对数
Te
电磁转矩
τr
转子时间常数
基于MC56F82748 DSC的单电阻采样三相交流感应电机的矢量控制设计参考手册, Rev. 0, 10/2014
8
Freescale Semiconductor
2 控制原理 2.1 三相交流感应电机
三相交流电机是一种用三相交流电控制的旋转机械,为了实现转速可调,电压源一般使用由功率 开关元器件构成的逆变器,产生幅值和频率可调的近似正弦波的交流电压。 一个三对极的三相交流感应电机的剖面图如图 2所示,定子槽内嵌有a,b,c三相绕组。为了在气 隙中生成近似正弦的磁势,绕组采用分布式绕制。当定子绕组流过三相对称、相角互差120°的正 弦交流电流时,气隙中会形成一个以定子电流频率旋转的磁场矢量。 根据三相交流感应电机的转子结构的不同,可分为鼠笼式和绕线式,其中鼠笼式最为常见,鼠笼 式转子绕组是自己短路的绕组,在转子铁芯的每个槽中放有一根导体(材料为铜或铝),导体比 铁芯长,在铁芯两端用两个端环将导体短接,形成短路绕组。若将铁芯去掉,剩下的绕组形状似 松鼠笼子,故称鼠笼式绕组。
基于MC56F82748 DSC的单电阻采样三相交流感应电机的矢量控制设计参考手册, Rev. 0, 10/2014
Freescale Semiconductor
7
Lm ω,������������, ������������������������������, ������������
定转子互感 转子电气角速度/转子电气角速度/滑差电气角速度/同步电气角速度
基于MC56F82748 DSC的单电阻采样三相交流感应电机的矢量控制设计参考手册, Rev. 0, 10/2014
Freescale Semiconductor
9
转矩
电动
刹车区
电动运行区间
发电运行区间
发电
-60 -40 -20 0 20 40 60 80 100 120 140 160 180
• 50 MHz内核 o 单周期32位乘以32位结果为32位或64位乘 - 累加指令,支持一个可选的32位并行数 据搬移指令 o 单周期16位乘以16位结果为16位或32位乘 - 累加指令,支持两个可选的16位并行数 据搬移指令 o 四个包含扩展位的36位累加器
• 片内64 KB Flash • 片内8 KB RAM • COP看门狗 • 中断控制器 • 系统集成模块 • 8通道高精度脉宽调制器 • 定时器 • 两个带X1、X2、X4可编程放大器的8通道高速12位ADC • 两个12位DAC • 四个带6位参考DAC的模拟比较器 • 串行通信接口:IIC、SCI、SPI和CAN • 四通道DMA • 两个内部模块互联单元(XBAR) • 与/或/非模块 • 低功耗控制模块 • 循环冗余校验码产生器
基于MC56F82748 DSC的单电阻采样三相交流感应电机的矢量控制设计参考手册, Rev. 0, 10/2014
6
Freescale Semiconductor
1.5 符号列表
表 2 符号索引列表
符号
d, q α, β usα, usβ usd, usq isa, isb, isc isd, isq isα, isβ urα, urβ urd, urq ird, irq irα, irβ imr Ψs������ Ψsβ Ψs������ Ψsq θΨ Rs Rr Ls Lsσ Lrσ Lr
Freescale Semiconductor
设计参考手册
Document Number: DRM153 Rev. 0, 10/2014
基于MC56F82748 DSC的单电阻采样三相交流 感应电机的矢量控制
1 概述
目录
1.1 参考方案简介
1 概述
1
本文档描述了基于飞思卡尔电机控制专用的数字信号
2 控制原理
Freescale Semiconductor
5
DMA DRM DT GPIO HSCMP I/O ISR IIC LED DSC PDB PLL PWM RPM XBAR SCI SPI
直接存储器访问模块 设计参考手册 死区时间 通用目的输入/输出 高速比较器模块 计算机系统与外部世界之间的输入/输出接口 中断服务例程 集成电路总线 发光二极管 数字信号控制器 可编程延时模块 锁相环 脉冲宽度调制器 每分钟转速 内部模块互联单元 串行通信接口模块 串行外设接口模块
基于MC56F82748 DSC的单电阻采样三相交流感应电机的矢量控制设计参考手册, Rev. 0, 10/2014
4
Freescale Semiconductor
• 支持单端或差分输入 • 三个模拟输入支持滞环PWM输出 本方案使用ADC与PWM的同步功能。此配置可以在所需的时间内完成对所需的逆变器电流和电 压等模拟信号的同时转换。
基于MC56F82748 DSC的单电阻采样三相交流感应电机的矢量控制设计参考手册, Rev. 0, 10/2014
2
Freescale Semiconductor
图 1 MC56F827XX简化框图
三相交流感应电机矢量控制和单电阻电流采样算法对PWM和ADC模块有特殊的需求。 MC56F82748的eFlexPWM模块提供了非常灵活的配置功能,可以实现高效的三相交流感应电机矢 量控制和单电阻电流采样。更为甚者,该eFlexPWM模块还能在中心对齐模式下产生非对称的PWM 输出。 eFlexPWM模块有以下主要特点:
1.2 飞思卡尔数字信号控制器的优势和特点
飞思卡尔MC56F82748数字信号控制器不仅带有兼具DSP和MCU优点的内核,同时还集成了诸多 如脉宽调制器(PWM)、模数转换器(ADC)、定时器、DMA、内部模块互联单元(XBAR), 通信外设(SCI,SPI,IIC),和片内Flash和RAM存储器等专用外设模块,非常适用于数字电机 控制应用。 MC56F82748集成以下功能模块:
电机的控制算法大体分为两类,一类是标量控制,如 被广泛应用的V/F恒压频比控制。另一类被称为矢量控 制或磁场定向控制(FOC)。相对于标量控制,矢量 控制全面提升了电机驱动性能,比如矢量控制实现了 转矩和磁链的解耦控制、全转矩控制、效率更高且提 高了系统的动态性能。
基于飞思卡尔电机控制专用的数字信号控制器 MC56F82748的三相交流感应电机矢量控制是一个面 对客户和工业应用的设计方案。低成本和高可靠性是 两个关键的考量指标。为了减小系统成本,我们采用 了单电阻电流采样方案。为了减少系统对参数的依赖, 我们使用了闭环的磁链估算方案,提升了系统稳定性 和鲁棒性。
定义 正交旋转坐标系 正交静止坐标系 定子电压在静止正交坐标系下的分量 定子电压在旋转正交坐标系下的分量 a、b、c相定子电流 定子电流在旋转正交坐标系下的分量 定子电流在静止正交坐标系下的分量 转子电压在静止正交坐标系下的分量 转子电压在旋转正交坐标系下的分量 转子电流在旋转正交坐标系下的分量 转子电流在静止正交坐标系下的分量 转子励磁电流 定子磁通在静止正交坐标系下的分量 定子磁通在旋转正交坐标系下的分量 转子磁链角 定子相电阻 转子相电阻 定子相电感 定子相漏感 转子相漏感 转子相电感
• 16位分辨率,支持中心对齐、边沿对齐和非对称PWM输出 • 高精度小数延时功能,同时支持高精度PWM频率和占空比 • 支持互补或独立PWM输出 • 支持符号数PWM生成 • PWM两个边沿的独立控制 • 支持与外部硬件或其它PWM模块同步功能 • 双缓冲PWM寄存器 • 每个PWM周期多个硬件触发输出 • 支持双开关PWM输出 • 每个故障输入能控制多个PWM模块输出 • 可编程的故障引脚输入滤波器
1.4 缩略语和缩写
表 1 缩略语
术语
含义
AC
交流电
ADC
模数转换器
API
应用程序接口
FSLESL
飞思卡尔嵌入式软件函数库
BEMF
反电动势
BLDC
无刷直流电机
CCW
逆时针方向
COP
看门狗
CW
顺时针方向
DAC
数模转换器
DC
直流电
基于MC56F82748 DSC的单电阻采样三相交流感应电机的矢量控制设计参考手册, Rev. 0, 10/2014
9
控制器MC56F82748的三相交流感应电机矢量控制方
3 系统概念
28
案。
三相交流感应电机因为其结构简单、工艺成熟、造价
4 硬件设计
31
低廉、无电刷、维护简单、鲁棒性强等优点,被广泛
5 软件设计
38
应用于工业控制
为了实现三相交流感应电机的调速,需要对电机提供 电压幅值和频率可变的交流电,一般使用由数控开关 逆变器构成的三相变频器。
基于MC56F82748 DSC的单电阻采样三相交流感应电机的矢量控制设计参考手册, Rev. 0, 10/2014
Freescale Semiconductor
3
• 独立可编程的PWM输出极性 • 独立的上下管死区时间插入 • 每个互补PWM信号对有自己独立的PWM频率和死区时间 • 每个PWM输出支持独立的软件控制 • 通过FORCE_OUT事件,能同时更改所有PWM输出状态 • PWM_X能配置成为每个PWM模块第三个PWM输出信号 • 未作为PWM输出使用的通道能配置为带缓冲的比较输出功能 • 未作为PWM输出使用的通道能配置为输入捕获功能 • 增强的双边沿捕获功能 • 每个PWM互补对的源信号可以来自以下信号: