840D常用编程实例
西门子840d工厂编程实例

目录第一章基础知识 (1)1.1西门子840D系统程序命名规则 (1)1.2 快速定位指令 G00(模态指令) (1)1.3直线插补指令 G01(模态指令) (2)1.4 圆弧插补 G02/G03(模态指令) (2)1.5 暂停指令 G04 (模态指令) (4)1.6 准确停止 G09 (非模态指令)、G60(模态指令) (4)1.7 G17、G18、G19 加工平面选择(模态指令) (4)1.8 G40、G41、G42刀具半径补偿(模态指令) (5)1.9 G53、G153、SUPA(非模态指令) G500(模态指令) (5)1.10 G54~G57、G505~G599工件坐标系(模态指令) (6)1.11 G64/G641 连续路径加工(模态指令) (7)1.12 G70/G71/G700/G710英制/公制(模态指令) (7)1.13 G90/G91绝对/增量尺寸(模态指令) (7)1.14 G94/G95 进给单位(模态指令) (8)1.15 G110、G111、G112极坐标(非模态指令) (8)1.16 FRAME框架指令(非模态指令): (9)1.17 辅助功能和部分指令 (11)1.18算术参数R与程序跳转GOTO (12)1.19子程序 (14)1.20程序段重复REPEATB与REPEAT (15)第二章测量与赋值 (18)2.1测量循环概要CYCLE977 、CYCLE978 (18)2.2供给参数 (19)2.3结果参数 (22)2.4参数的赋值$P_UIFR (25)第三章标准循环 (28)3.1钻孔循环CYCLE81 (28)3.2钻孔循环CYCLE82 (28)3.3钻深孔循环CYCLE83 (29)3.4刚性攻丝螺纹循环CYCLE84 (29)3.5柔性攻丝螺纹循环CYCLE840 (30)3.6精镗孔循环CYCLE86 (30)3.7射线性排列孔的钻孔循环HOLSE1 (31)3.8圆周排列孔的钻孔循环HOLES2 (31)第四章编程实例 (32)4.1平面钻孔实例 (32)4.2椭圆加工实例 (35)4.3圆柱表面加工 (37)4.4铣圆弧面加工 (39)4.5钻孔攻丝实例 (41)4.6镗孔实例 (43)4.7背铣实例 (44)4.8深孔加工实例 (46)4.9坐标系旋转加工 (48)4.10 成排孔加工 (50)4.11倒角编程实例 (52)4.12倒圆角编程实例 (54)4.13镜像编程实例 (55)4.14凸轮加工实例 (57)4.15腔体加工实例 (58)4.16综合加工实例(一) (59)4.17综合加工实例(二) (61)4.18综合加工实例(三) (63)4.19综合加工实例(四) (65)4.20综合加工实例(五) (67)附录西门子840d出口版本 (69)计算变量 (69)用户定义变量 (69)运算符 (70)无限程序循环LOOP (71)计数循环FOR (71)在循环开头带有条件的程序循环WHILE (71)在循环结尾带有条件的程序循环REPEAT (72)轴使能: RELEASE (73)轴接收: GET (73)轴直接接收: GETD (73)模态子程序:MCALL (74)间接调用子程序CALL (75)调用带路径说明和参数的子程序:PCALL 编程 (75)第一章基础知识1.1西门子840D系统程序命名规则a、前一个符号必须是字母或数字(或一个字符有下划线)b、其余符号可以是字母、数字及下划线c、程序名最多有24个字符d、字符间不允许使用分隔符常见程序段格式N…G…X…Y…Z…F…S…D…T…M…说明N… 程序段号G… 准备功能X…Y…Z… 坐标终点F… 进给速度S… 主轴转速D… 刀沿号T… 刀具号M… 辅助功能1.2 快速定位指令 G00(模态指令)格式G0 X… Y… Z …G0 AP=… RP=…解释X Y Z 直角坐标的终点AP= 极坐标的终点,这里指极角 (下面章节具体介绍极角用法)RP= 极坐标的终点,这里指极半径(下面章节具体介绍极半径用法)指令用途快速运行进行刀具的快速定位,工件的绕行或者返回换刀位置。
西门子840D G指令精编版

840D综合G00快速定位;G01直线插补;G02顺时针圆弧插补;G03逆时针圆弧插补;G04暂停;G09准确停止;G17 XY平面选择;G18 ZX平面选择;G19 YZ平面选择;G20英制指令;G21公制指令;G27返回参考点检查;G28返回参考点;G29返回第二参考点;G30返回第三/四参考点;G40刀具半径补偿取消;G41刀具半径补偿左;G42刀具半径补偿右;G43刀具长度补偿+;G44刀具长度补偿-;G45刀具偏置+;G46刀具偏置-;G47刀具偏置++;G48刀具偏置--;G49刀具长度补偿取消;G52局部坐标系;G53选择机床坐标系;G54~G59预置工件坐标系1~6;G60单向定位;G61准确停止(模态指令);G62拐角减速;G63倍率禁止;G64切削模式;G65宏调用;G66模态宏调用;G73深孔钻循环1;G74攻丝循环(反螺纹);G76镗循环1;G80取消固定循环;G81钻孔循环;G82镗循环2;G83深孔钻循环;G84攻丝循环(正螺纹);G85~G89镗循环3~7;G90绝对值编程;G91增量值编程;G94每分进给;G95每转进给;G98固定循环回起始点;G99固定循环回R点。
M00程序停止;M01可选程序停止;M02程序结束;M03主轴正转;M04主轴反转;M05主轴停止;M06自动刀具交换;M08冷却开;M09冷却关;M29刚性攻丝;M30程序结束并回程序头。
G54G18G90或G91增量。
编程找出点在GO1走直线(这直线是垂直于那个面的线,这个你自己算点)就可以加工了,刀具开始要调整好角度,垂直于那个面。
G17是XY平面G18是zx平面G19是YZ平面这个也比较好办。
比如在G17平面上。
钻孔用的z方向,如果面不平的情况,比如他往x方向倾斜的多少度。
那么钻孔时候走的线应该是斜线(你应该是想做一个垂直于斜面的孔吧)那么你可以先在cad里面画出来,把要钻的那个孔走的那条直线画出来,在找到起始点,坐标值和终点坐标值都找的到,最后就是用G01走出来了,走斜线不是一样走吗.不管在哪个面都一样,不愿计算,就用cad画出来再标出起始点和终点。
SIEMENS840D数控编程
第一讲:基本概念1、西门子系统简介:常见系统有802S/C系统、802D系统、810D系统和840D系统。
其中,西门子802S/C 系统是西门子公司专门针对中国用户开发的一款系统。
目前西门子系统在中国市场得到了广泛的应用,西门子840D更是以高端系统出现。
西门子系统与FANUC系统的比较2、基本概念2.1插补功能:指定刀具沿直线轨迹或圆弧轨迹移动的功能称为插补功能。
它属于准备功能,用G代码后跟若干位数字来表示。
2.2进给功能:用于指定刀具运动速度的功能。
单位为mm/min。
用F指令2.3参考点:一个固定的点,是机床生产商通过行程开关设定的一个特定位置。
在数控操作中所谓的“回零”回的就是此点。
2.4机床原点(零点):即机床坐标系的原点,也是一个固定点。
它是机床制造商在制造、校正机床时设定的一个特殊位置。
2.5坐标系:在数控系统中提到共四个坐标系,即机床坐标系、机床参考坐标系、工件坐标系和编程坐标系。
数控系统中的坐标系均为右手笛卡尔坐标系,如图示:2.5.1机床坐标系:是机床制造商在设计机床时设定的一个坐标系2.5.2机床参考坐标系:是机床生产商通过行程开关设定的一个坐标系2.5.3工件坐标系:为确定工件在机床中的准确位置而建立的一个坐标系,即后面所学到的可设定零点偏置确定的坐标系。
2.5.4编程坐标系:在程序编制过程中,在零件图纸上建立的坐标系2.6主轴功能:用于确定主轴转速的功能,即S指令主轴定位用SPOS=XX格式表示2.7切削速度:切削工件时刀具与工件的相对速度称为切削速度v.S=1000v/Πd其中:S:主轴转速V:切削速度D:刀具直径例:假设用直径φ160mm的刀具,以100m/min的切削速度加工工件,试求其主轴转速?注:进给速度Vf=机床转速n*刀具齿数Z*每齿切削深度fz,单位是毫米/分钟2.8辅助功能:指令机床部件启停操作的功能。
用M指令表示2.9主程序和子程序:2.10准备功能:用来控制刀具(或工作台)运动轨迹的机能。
SIEMENSSINUMERIK840D系统参数编程

SINUMERIK系统参数编程一计算参数R1.功能要使一个NC程序不仅仅适用于特定数值下的一次加工,或者必须要计算出数值,两种情况均可以使用计算参数,你可以在程序运行时由控制器计算或设定所需要的数值;可以通过操作面板设定参数数值。
如果参数已经赋值,则它们可以在程序中对由变量确定地址进行赋值。
2.编程R0=...到R249=...3.说明一共250个计算参数可供使用。
R0...R99 - 可以自由使用R100...R249 -加工循环传递参数如果你没有用到加工循环,则这部分计算参数也同样可以自由使用。
4.赋值举例一:R0=3.5678 R1=-37.3 R2=2 R3=-7 R4=-45678.1234用指数表示法可以赋值更大的数值范围:(10-300...10+300).指数值写在EX符号之后;最大符号数:10(包括符号和小数点).EX值范围:-300到+300举例二:R0=-0.1EX-5 ;意义:R0=-0.000 0001R1=1.874EX8 ;意义:R1=187 400 000注释:一个程序段中可以有多个赋值语句;也可以用计算表达式赋值。
5.给其他的地址赋值通过给其它的NC地址分配计算参数或参数表达式,可以增加NC程序的通用性。
可以用数值、算术表达式或R参数对任意NC地址赋值。
但对地址N、G和L例外。
赋值时在地址符之后写入符号“=”赋值语句也可以赋值-负号。
给坐标轴地址(运行指令)赋值时,要求有一独立的程序段。
举例:N10 G0 X=R2 ;给X轴赋值6.参数的计算在计算参数时也遵循通常的数学运算规则。
原括号内的运算优先进行。
另外,乘法和除法运算优先于加法和减法运算。
二标记符――程序跳转目标1.功能1)标记符用于标记程序中所跳转的目标程序段,用跳转功能可以实现程序运行分支。
2)标记符可以自由选取,但必须由2一个字母或数字组成,其中开始两个符号必须是字母或下划线。
3)跳转目标程序段中标记符后面必须为冒号。
SIEMENS_840D数控编程
第一讲:基本概念1、西门子系统简介:常见系统有802S/C系统、802D系统、810D系统和840D系统。
其中,西门子802S/C 系统是西门子公司专门针对中国用户开发的一款系统。
目前西门子系统在中国市场得到了广泛的应用,西门子840D更是以高端系统出现。
西门子系统与FANUC系统的比较2、基本概念2.1插补功能:指定刀具沿直线轨迹或圆弧轨迹移动的功能称为插补功能。
它属于准备功能,用G代码后跟若干位数字来表示。
2.2进给功能:用于指定刀具运动速度的功能。
单位为mm/min。
用F指令2.3参考点:一个固定的点,是机床生产商通过行程开关设定的一个特定位置。
在数控操作中所谓的“回零”回的就是此点。
2.4机床原点(零点):即机床坐标系的原点,也是一个固定点。
它是机床制造商在制造、校正机床时设定的一个特殊位置。
2.5坐标系:在数控系统中提到共四个坐标系,即机床坐标系、机床参考坐标系、工件坐标系和编程坐标系。
数控系统中的坐标系均为右手笛卡尔坐标系,如图示:2.5.1机床坐标系:是机床制造商在设计机床时设定的一个坐标系2.5.2机床参考坐标系:是机床生产商通过行程开关设定的一个坐标系2.5.3工件坐标系:为确定工件在机床中的准确位置而建立的一个坐标系,即后面所学到的可设定零点偏置确定的坐标系。
2.5.4编程坐标系:在程序编制过程中,在零件图纸上建立的坐标系2.6主轴功能:用于确定主轴转速的功能,即S指令主轴定位用SPOS=XX格式表示2.7切削速度:切削工件时刀具与工件的相对速度称为切削速度v.S=1000v/Πd其中:S:主轴转速V:切削速度D:刀具直径例:假设用直径φ160mm的刀具,以100m/min的切削速度加工工件,试求其主轴转速?注:进给速度Vf=机床转速n*刀具齿数Z*每齿切削深度fz,单位是毫米/分钟2.8辅助功能:指令机床部件启停操作的功能。
用M指令表示2.9主程序和子程序:2.10准备功能:用来控制刀具(或工作台)运动轨迹的机能。
西门子840d数控编程实例一本通

30RMB本书为工厂内部培训资料,页面为A4大小,市面上没有出售,如有需要请提前预定QQ:574164352旺旺:zhizunzhangdalong说明SINUMERIK 840D 是西门子数控产品的突出代表。
于20世纪90年代推出。
它保持西门子前两代系统SINUMERIK 880和840C的三CPU结构:人机通信CPU(MMC-CPU)、数字控制CPU(NC-CPU)和可编程逻辑控制器CPU(PLC-CPU)。
三部分在功能上既相互分工,又互为支持。
它在复杂的系统平台上,通过系统设定而适于各种控制技术。
SINUMERIK 840D数控系统适用于几乎所有的应用,可实现灵活组网,发挥机床及生产线最大效力,高度开放的HMI和NCK能满足不同客户的个性化需求,无论是各种用户定制画面,还是专有技术、特殊工艺均能轻松与系统无缝连接。
利用完善的SINUMERIK MDynamics (3轴/5轴)铣削工艺包、优异的同步功能,80位浮点数纳米(NANOFP)计算精度、空间补偿系统(VCS)等创新技术的应用使机床性能更胜一筹,实现最佳的加工质量。
可以说西门子系统在中国得到了广泛的运用,尤其SINUMERIK 840D数控系统以高端的性能而赢得使用者的好评本笔记以PAMA机床为例,通过整理筛选以往的实际加工零件,笔者终于完成了本书的制作,本书总结的例题皆为实际加工案例,不同于学校的教科书,只要用心学习,不出多日读者自己便可熟练的编程本笔记适合初学者使用,每个程序后面都有详细的指令用法及含义解释,为笔者多年的经验总结。
由于笔者水平有限,书中难免有不足之处,欢迎读者批评指出。
祝读者早日掌握编程技术,步步高升。
编者2011年8月目录第一章基础知识 (5)1.1西门子840D系统程序命名规则 (5)1.2 快速定位指令 G00(模态指令) (5)1.3直线插补指令 G01(模态指令) (6)1.4 圆弧插补 G02/G03(模态指令) (7)1.5 暂停指令 G04 (模态指令) (8)1.6 准确停止 G09 (非模态指令)、G60(非模态指令) (8)1.7 G17、G18、G19 加工平面选择(模态指令) (9)1.8 G40、G41、G42刀具半径补偿(模态指令) ..................................... 错误!未定义书签。
西门子840D编程学习之欧阳数创编
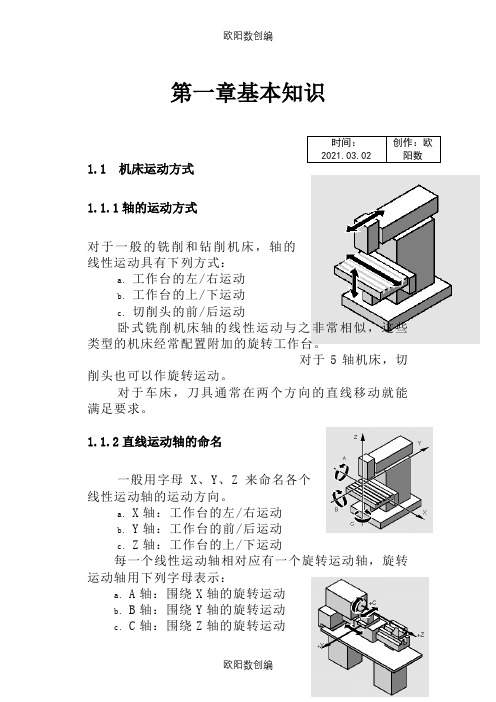
时间:2021.03.02 创作:欧阳数第一章基本知识1.1 机床运动方式1.1.1轴的运动方式对于一般的铣削和钻削机床,轴的线性运动具有下列方式:a.工作台的左/右运动b.工作台的上/下运动c.切削头的前/后运动卧式铣削机床轴的线性运动与之非常相似,这些类型的机床经常配置附加的旋转工作台。
对于5轴机床,切削头也可以作旋转运动。
对于车床,刀具通常在两个方向的直线移动就能满足要求。
1.1.2直线运动轴的命名一般用字母X、Y、Z来命名各个线性运动轴的运动方向。
a.X轴:工作台的左/右运动b.Y轴:工作台的前/后运动c.Z轴:工作台的上/下运动每一个线性运动轴相对应有一个旋转运动轴,旋转运动轴用下列字母表示:a.A轴:围绕X轴的旋转运动b.B轴:围绕Y轴的旋转运动c.C轴:围绕Z轴的旋转运动对于只有两个线性运动轴的车削机床用下列方法来描述刀具的运动:刀具的横向运动通常叫作X轴,刀具的纵向运动通常叫作Z轴。
1.1.3刀具的相对运动铣削机床的加工无论是靠刀具的运动还是靠工作台的运动来满足加工要求。
在数控加工技术中,通常假定刀具总是运动的。
操作者不必考虑机床运动的具体执行方式。
这种假定方法也适用于其它不同类型机床的程序运行。
1.1.4位置数据机床运动可以通过编程使某一指定轴到达指定位置。
例如:X100这表示工作台在X方向移动100mm,或者说是刀具相对于工件在X方向移动100mm。
也可以通过程序来实现多轴联动。
例如:X100 Y1001.2 工件位置表示1.2.1机床坐标系机床必须指定一个线性运动轴在相应方向运动的参考坐标系,以使机床或切削控制在指定位置成为可能。
通常以字母X、Y、Z轴构成的直角坐标系来描述。
按照标准DIN 66217的规定,机床刀具运动用右手直角笛卡儿坐标系来描述,坐标系的交点叫零点或原点。
有时机床工作需要甚至必须用负的位置坐标数据,原点以左的位置坐标通过在坐标数据前冠以“—”号表示。
1.2.2位置定义为了定义一个位置,假定沿着坐标轴遵循一定的规则。
西门子840D编程学习资料

对于一般的铣削和钻削机床,轴的线性运动具有下列方式:对于 5 轴机床,切削头也可以作旋转运动。
1.1.2 直线运动轴的命名a. A 轴:围绕X 轴的旋转运动b. B 轴:围绕Y 轴的旋转运动c. C 轴:围绕Z 轴的旋转运动对于只有两个线性运动轴的车削机床用下列方法来描述刀具的运动:机床必须指定一个线性运动轴在相应方向运动的参考坐标系,以使机床或切削控制在指定位置成为可能。
通常以字母X、Y、Z 轴构成的直角坐标系来描述。
按照标准DIN 66217 的规定,机床刀具运动为了定义一个位置,假定沿着坐标轴遵循一定的规则。
那幺现在就可以用指定的坐标方向(X、Y、Z 向)及三个资料描述坐标系上的每一点。
原点坐标为X0、Y0、Z0。
例如:例:图中的P1 至P3 点在这个例子中用下列坐标定义:在绝对坐标系中,所有点的坐标都是参考坐标系原点而来的,适用于刀具的运动。
它的含义为:用绝对坐标值描述的位置是刀具将要到达的位置。
例如:图中的P1 点至P3 点的绝对坐标为:X20 Y35(相对于原点的坐标X50 Y60(相对于原点的坐标X50 Y60 (相对于原点的坐标在加工图样中,经常用到相对坐标。
X20 Y35 (相对于原点的坐标值)X30 Y20 (相对于P1 点的坐标值)X20 Y-35(相对于P2 点的坐标值)坐标轴垂直于这个平面,决定刀具进给的方d. 当前零件坐标系在机械运动学中,编程中常用到坐标系的转换。
机床坐标系的设定与机床的类型有关,坐标轴的方向遵循右手的“三手指规则”(根据标准DIN 66217 )。
这些变换功能可以单独运用,也可以综合运用。
零件坐标系的位置与基本坐标系(或机床坐标系)的关系通过矩阵变换编程来决定。
在NC 程序中通过如G54 等指令调出或激活零件坐标系。
主坐标轴定义一个右手坐标系,刀具在这个坐标系中通过编程实现运动。
在数控加工技术中,主坐标轴被称为几何轴。
在这本编程手册中常用这种说法。
利用西门子840D系统实现自动记录切削时随编程原理及实例分析

一
程 序名
; ¥P A T H =\ 一N — M P F—D I R
, / 程 序文 件路 径
N01 0 DEF I NE I NT
—
计 初 衷 是 为 了 协 调程 序 中各 个 动 作 之 间 的执 行 顺 序 ,编 程 时往 往 被 当做 某 个 条 件 判断 语 句 中的条件 来使 用 ,例如 :
忽 略 了 ,正 是 ¥ A C _ T I ME R [ n 1 可 编程 地控
参 数 说 明 :E R R 0 R — — 就 返 回的错 :没 有 错 误 ;1 :不 允 许 制开始 、停止 以及可读取 的特性 ,使之 误 可 变 函 数 。0 的路 径 ;2 :找 不 到 路 径 ;3 :找 不 到 文 件 ;4 :文 件类 型不 正确 ;1 0 :文 件 已满 ;
这 里 必须 应 用 到 另 一 个 关键 的编 程 指 令 —— wR I T E :编 写 文 件 ,基 本 定 义
开
N 0 8 0 S A C _ T I ME R [ I ] = 0 / / 设 置 计 时器 N 0 9 0 G1 Z 4 4 8 F 4 5 / / 开始切 削
一
②停 止定 时器 实时变 量 I 1 :定 时 器 变 量 号 码 。 通 过赋予一个负值 ¥ A C T I M E R [ I ] = 一 1 停 止 定 时 器 变量 的增 量 。¥ A C T I M E R [ n ] 的设
F % N 0 381 M P
一
/ /
一
编
程
格
式 :WR I T E( V A R I N T
来 输 出 一个 实 际 坐标 值 。 然 而 系统 变 量 E RR O R, C HA R【 1 6 0 】F I L E NA ME, H A R [ 2 0 0 ] S T R I N G) ¥ A C _ T I M E R [ n ] 计 时 的基 本 属性 却 一 直被 C
SINUMERIK 840D基础编程概述
SINUMERIK 840D基础编程概述一、位移说明1、尺寸参数绝对尺寸输入G90 X=AC(…) Y=AC(…) Z=AC(…)相对尺寸输入 G91 X=IC(…) Y=IC(…) Z=IC(…)2、回转轴尺寸说明(绝对)绝对尺寸直接回位 B=DC(…)位置在正方向返回 B=ACP(…)位置在负方向返回 B=CAN(…)3、尺寸说明G71——英制G72——公制G700——英制G701——公制4、零点偏移G53——以程序段方式取消零点偏移G54……G57——调用零件偏移G153——以程序段方式抑制整个基本框架G500——G500=0时,取消零点偏移G54……G599G500<>0时,激活第一个可设定零点偏移($P_UIFR[0])激活整个基本框架($_ACTBFRAME)SUPA——程序段方式取消,包括编程的位移、手轮偏移(DRF)、外部零点偏移和PRESET偏移G505……G599——调用零点偏移5、工作平面选择G17——X/Y平面G18——Z/X平面G19——Y/Z平面6、可编程工作区域限制G25,X Y Z——工作区域下限G26,X Y Z——工作区域上限WALIMON——使用工作区域限制WALIMOF——取消工作区域限制7、基准点运行G74 X=0 Y=0 Z=0 B=0……G75 X=0 Y=0 Z=0 B=0……二、编程位移指令1、极坐标:G110 G111 G112 X_ Y_ Z_G0/G1/G2/G3 AP=_ RP=_G110——参考最近位置G111——工件坐标系中的绝对值G112——根据最近有效的极坐标AP=——极角,数值范围-360—+360度RP=——极半径2、快速运行 G0RTLIOF——非线性插补(单轴插补)RTLION——线性插补(轨迹轴共同插补)3、直线插补G1 X_ Y_ Z_ F_G1 AP=_ RP=_ F_4、圆弧插补终点/圆心方式: G2/G3 X_ Y_ Z_ I_ J_ K_极坐标方式: G2/G3 AP=_ RP=_终点/半径方式: G2/G3 X_ Y_ Z_ CR=_圆弧角/圆心方式: G2/G3 AR=_ I_ J_ K_圆弧角/终点方式: G2/G3 AR=_ X_ Y_ J_中间点圆弧插补: CIP X_ Y_ Z_ I1_ J1_ K1_切线过渡的圆弧: CT X_ Y_ Z_5、螺旋线插补G2/G3 X_ Y_ Z_ I_ J_ K_ TURN=_G2/G3 AR=_ I_ J_ K_ TURN=_G2/G3 AR=_ X_ Y_ Z_ TURN=_G2/G3 AP=_ RP=_ TURN=_TURN=_ 附加圆弧运运次数0—9996、渐开线插补INVCW/INVCCW X_ Y_ Z_ I_ J_ K_ CR=_INVCW/INVCCW I_ J_ K_ CR=_ AR=_INVCW——沿渐开线顺时针运行INVCCW——沿渐开线逆时钊运行AR>0时,运动轨迹偏离基准圆AR<0时,向基准圆运动X_ Y_ Z_ ——终点坐标I_ J_ K_ ——基准圆圆心7、轮廓定义(1)带角的直线 X2_/Z2_ ANG=_(2)两直线 ANG1_ 或 X1_ AZ1_X3_ Z3_ ANG2_ X3_ Z3_ANG1/ANG2——第1/2条直线角度CHR——棱角X1,Z1=起点 X2,Z2=两直线交点X3,Z3=终点8、不带补偿夹具的攻丝攻丝:G331 X_ Y_ Z_ I_ J_ K_攻丝回退:G332 X_ Y_ Z_ I_ J_ K_X,Y,Z——钻孔深度I,J,K——螺纹螺距(在X,Y,Z方向)9、带补偿夹具的攻丝G63 X_ Y_ Z_10、螺纹切削停止LFON——启动切削螺纹快速后退(G33)后退轨迹DILF LFOF——取消切削螺纹快速后退(G33)后退轨迹DILF DILF——后退轨迹(长度)ALF=(轴)——确定执行平面(LFTXT)的回程方向LFWP——在工作平面的回程方向G17,G18,G19LFPOS——到用POLF编程设计位置的回程方向POLF——轴的绝对后退位置POLFMASK——轴单独后退到绝对位置POLFMLIN——轴按线性关系单独后退到绝对位置11、返回固定点G75 FP=_ X1=_ Y1=_ Z1=_ U1=_FP=——应当返回到固定点的编号12、倒角,倒圆CHF=_——轮廓角倒棱(倒角长度)CHR=_——轮廓角倒棱(运动方向中宽度)RND=_——轮廓角倒圆(半径)RNDM=_——模态倒圆FRC=_——非模态进给率(FRC>0,=0时为取消)FRCM=_——模态进给率(=0时激活F值)说明:·发生平面转换不插入倒角/倒圆·用G0时,FRC/FRCM无效·FRC改写当前F值或FRCM值·FRCM>0,则出现10860报警(进给类型转换前)三、轨迹位移性能1、准停G60——准停(模态)G9——准停(非模态)G601——精确定位后,程序段转换G602——粗定位后,程序段转换G603——插补结束后,程序段转换2、轨迹控制运行G64——轨迹控制运行G641 ADIS——可编程过渡磨削G642 ADISPOS=_——精磨削,带轴向公差G643——程序段精磨削G644——精磨削,带最大可能动态ADIS——磨削距离,用于G1,G2,G3AKISPOS——精磨削,用于G03、加速性能BRISK——轨迹轴加速度突变BRISKA——用于编程的进给SOFT——轨迹轴冲击限制的加速度SOFTA——用于编程进给轴DRIVE——高于设定速度时降低轨迹轴加速度DRIVEA——用于编程进给轴VELOLIMA[AX]——改变跟随轴中最大速度的极限ACCLIMA[AX]——改变跟随轴中加速度的极限JERDLIMA[AX]——改变跟随轴中冲击的极限4、带预控制运行FFWON——接通预控制FFWOF——取消预控制*通过预控制与速度相关的超程长度在轨迹运行时降低到接近于零5、可编程的轮廓精度CPPECON——接通CPPECOF——取消6、停留时间GO4 F_/S_ F_ 秒钟 S_ 转数四、框架1、可编程零点偏移TRANS X_ Y_ Z_ 绝对零点偏移ATRANS X_ Y_ Z_ 附加零点偏移G58,G59 X_ Y_ Z_ 轴向可编程零点偏移2、可编程的旋转ROT X_ Y_ Z_ 围绕几何轴空间旋转ROT RPL=_——坐标系平面旋转AROT——附加旋转3、可编程框架旋转ROTS——绝对旋转AROTS——附加旋转CROTS——用立体角进行框架旋转X_ Y_ Z_ ——立体角(允许给定两个)4、可编程比例系数SCALE X_ Y_ Z_——绝对放大/缩小ASCALE X_ Y_ Z_——附加放大/缩小X_ Y_ Z_——几何方向比例系数5、可编程镜像MIRROR——绝对镜像AMIRROR——附加镜像X0,Y0,Z0——几何轴五、进给率控制,主轴运行1、进给率G93——以转/分钟表示的时间倒数进给率G94——以mm/min或inch/min表示进给率G95——以mm/转或inch/转表示进给率FGROUP(X,Y,Z)——F对所有指定的轴有效2、运行定位轴POS[轴]=——给轴定位,程序顺序执行POSA[轴]=——给轴定位,程序同步执行POSP[轴]=(,,)——回到零件终点位置,用于振荡运动编程FA[轴]=——定位轴进给率3、位置控制的主轴运动SPCON[n]——从转速控制转换到位置控制SPCOF[n]——从位置控制转换到转速控制4、定位主轴SPOS[n]——主主轴定向(顺序执行)M[n]——主主轴定向(顺序执行)SPOSA[n]——主主轴定向(同步执行)Mn=70——主主轴定向(同步执行)FINEA[Sn]——精准停COARSEA[Sn]——粗准停5、定位轴/主轴的进给率FA[轴]=——以mm/min,inch/min或度/min规定进给率FA[SPI(轴)]=——以度/min定位进给(轴向进给)FPR(轴)——在G95下编程可作为轨迹轴和同步轴的旋转进给率FPRAON[Sn,Sn]——轴向激活旋转进给率FPRAOF[Sn]——取消旋转进给率6、进给倍率OVR=——轨迹进给F倍率OVRA[轴]=——轴定位进给率OVRA[SPI(n)]——主轴转速倍率7、主轴转速及旋转方向M3——顺时针旋转M4——逆时针旋转M5——主轴停转SETMS(n)——将n轴设为主主轴SETMS——主主轴复位8、可编程主轴转速极限G25 S_——主轴转速下限G26 S_——主轴转速上限六、刀具补偿1、刀具选择/调用Tx L06——刀具调用T0——刀具选择撤销2、刀补DDx——刀补号D0——撤消刀补3、刀具半径补偿G40——取消刀补G41——半径左补偿G42——半径右补偿OFFN——编程轮廓加工余量4、轮廓返回和离开NORM——直接在直线上运行KONT——按照编程的拐角性能运行轮廓点G450到G451KONTC——弯曲部分平缓的进行DONTT——切线部分平缓的进行5、外角的补偿G450 DISC=_——过渡圆弧,运行指令的柔性编程G451——切削点,刀具从工件拐角返回DISC=0——过渡圆弧DISC=100——等距线的交点6、平滑逼近和退回G140——逼近和退回与当前的补偿面有关(缺省值)G141——从左侧逼近或向左侧回退G142——从右侧逼近或向右侧回退G143——逼近和退回方向与起点或终点的切线方向相对位置有关G147——以直线方式逼近G148——以直线方式退回G247——沿一个象限逼近G248——沿一个象限退回G347——以半圆逼近G348——以半圆退回G340——在空间的逼近与退回G341——平面中逼近与退回IDSR=——G147/G148中从铣刀边缘到轮廓起始点G247/G347中刀具中心轨迹半径在REPOS带半圆情况下,DISR表示圆弧直径DISCL=——快速进刀终点到加工平面的距离DISCL=AC(_)FAD=——慢速进刀速度FAD=_编程值与15组G代码相符FAD=PM(_)与15组G代码无关,作为直线进给使用(G94)FAD=PR(_)与15组G代码无关,作为旋转进给使用(G95)7、轮廓冲突监控CDON——激活瓶颈识别CDOF——取消瓶颈识别。
齿轮加工程序(840d循环程序)

N6300 G01 Z=R32 F=R42
N6400 G01 X=R30 F=R42
N6500 G01 Y=R31 F=R42
N6600 FOR HK4=R18+1 TO R20
N6700 R79=HK5
;N1067 $A_DBB[25]=R[100+HK5]
N6800 G01 X=R30 F=R42
N8000 M08
;N8100 G64G01Z=R45 F=R41
;N8200 G64G01Z=R46 F=R41 H1=R44
;N8300 G04F=R47
N8400 G64G01Z=R37 F=R41 H1=R43
N8500 G64G01Z=R39 F=2000 M21
N8600 H1=0
/_N_CHI_MPFCHI15_12517.MPF
*/_N_MPF_DIR/
;R10 ;齿轮圈模数
;R11 ;齿轮圈直径
;R12 ;齿轮圈厚度
;R13 ;齿轮圈齿数
;R14 ;起始偏移角度
;R15 ;起始偏移齿数
;R16 ;旋转速度
;R17 ;进给速度
N10100 GOຫໍສະໝຸດ OF END10 N10200 END3: MSG("加工参数设定错,请检查跳齿齿数")
N10300 M0
N10400 GOTOF END10
N10500 END4:MSG("加工参数设定错,请检查已加工齿数")
N10600 M0
N10700 GOTOF END10
N10800 END6: MSG("加工齿数完成")
西门子840D810D数控系统数控编程
西门子840D/810D数控系统数控编程1.程序跳段:只要在希望跳过的程序段的程序段前插入识别符“/”,在程序执行过程中的指令便不会被执行,转而继续执行下面不带跳段识别符的程序段。
例如:N10 …执行/N20…跳过N30…执行2.条件转向语句为“IF…GOTOB/GOTOF…”,条件式所用的条件比较符号允许用:= =(等于)、>、>= 、<、<=。
3.程序注释:注释通常附加在程序段的末尾,并用分号“;”将注释与NC程序分开。
4.主程序: 文件名的后缀位MPF;子程序:文件名的后缀位SPF;5.极坐标运动指令:在其坐标系中的运动指令: G0 AP=…(极角) RP=…(极径)指令说明:G110极点位置,以刀具当前点位置为参考点。
G111 极点位置,在工件坐标系中的绝对尺寸。
G112 极点位置,以前一个极点位置为参考点。
6.采用半径和终点进行圆弧编程:指令说明:G2/G3 X… Y… Z… CR…(为圆弧半径)。
CR =“+”…圆弧角度小于或等于180,CR=“-”…圆弧角度大于或等于180。
7.螺旋插补(G2/G3,TURN)指令形式:G2/G3 X… Y… Z… I… J… K… TURN…G2/G3 X… Y… Z… CR=…TURN…指令说明:X,Y,Z:圆弧终点坐标。
I,J,K:圆心位置。
CR=:圆弧半径。
TURN=:圆弧经过起点的次数,即整圆的圈数。
整圆范围:0—999。
举例:起点(X27.5 ,Y32.99, Z-5)逆时针执行两整圈,接近终点(X20, Y5, Z-20).程序:…N30 G17 G0 X27.5 Y32.99 Z3N40 G17 G1 Z-5 F50N50 G3 X20 Y5 Z-20I=AC(20) J=AC(20) TURN=28.坐标系转换指令:可编程指令零点偏移(TRANS,ATRANS)指令形式:TRANS(ATRANS) X… Y… Z…(在单独程序段编写)指令说明:TRANS为可替代指令,参照被激活的可设定零偏(G54-G57)的绝对变换。
第二课840D数控基础编程课件

AMIRROR X0 Y0 Z0
MIRROR
取消镜面反射
PPT文档演模板
第二课840D数控基础编程课件
五、框架命
令 4.进给率控制和主轴运动
4.1、进给率
G94 按mm/min G95 按mm/rev
F…按G94,G95指定的单位计的进给值
4.2、主轴速度S
PPT文档演模板
第二课840D数控基础编程课件
三、定位指
令 1. 绝对/增量尺寸,G90/91
绝对尺寸
G90(模态) X100 绝对尺寸(非模态)
增量尺寸
G91(模态) X100增量尺寸(非模态)
例:N10 G90 G0 X45 Y60 Z2 T1 S2000 M3
N20 G1 Z-5 F500
刀具横进给
CR=-...:角度大于180
整圆不能用CR=编程,但必须用圆终点和插补参数...Y...Z...I...J...K...TURN= 6、恒定导程的螺纹切削,G33
TURN:全循环 次数
G33 X...Z...K...SF=...* (K指锥角45)
G33 X...Z...I...SF=...* (I指锥角45)(SF=只需要对多线数螺纹编
“/”。几个相连程序段亦可跳越,不执行跳越程序段中的指令,程序从下一个不 的程序段处继续。
PPT文档演模板
第二课840D数控基础编程课件
二、程序编制概述
1.3 注解
为了使其它用户和程序员更容易理解NC程序,建议在程序中插入有意义的注解
用分号(“;”)
例: N10 G1 F100 X10 Y20
;解释NC块的注解
TRANAS
取消可编程零补偿 适合所有轴
840D简明教程

第一节:对刀按键激活手动方式1.2.用手轮把刀架摇至工件合适位置,并用刀尖轻碰内孔壁或者外圆按键返回加工界面3.4.按屏幕下方“对刀”软键。
在出现的画面中用用切换选项方向键变换位置,(依次设置为G18加工平面,G500工件坐标系和T1D1号刀具)注:G17为XY平面,G18为XZ平面,G19为YZ平面车床为G18 G500为西门子系统默认工件坐标系轴位置输入当前工件的内孔或外圆直径,并按下X5.在键,使其生效并按下0键,抬升刀架,并轻碰工件上表面;在Z轴处输使其生效软键,即可完成对刀“确认”6.按屏幕右方说明:1.一定要搞清楚自己对的是哪一把刀,在其后的编程中调用它就可以了。
2.通过调整一把刀具的不同刀沿号或者不同的磨损值可以进行高效的粗精加工,并且无需修改程序,同时也更加容易保证精度。
(如何通过修改磨损保证精度见后页)西门子840D简明教程第二节:磨损值的调整与计算磨损值的意义在于它会沿+X方向或者-X方向按给定的数值发生偏移,以做到留下加工余量或者调节精度的作用。
几点常识:1.外圆应该留正的磨损值,内孔留负值2.西门子系统磨损值为单边的余量,即半径值(Fanuc为直径值)精加工磨损值的计算方法:(理想值—测量值)/2+当前磨损值=精加工磨损值范例:有一工件内径基本尺寸要求为500mm上偏差+0.06,下偏差0,预留了-0.5mm的磨损值,现测量得出实际尺寸为498.86mm,问磨损值应该改为多少?答:由提示得出此工件内孔的理想尺寸应为500.03mm,根据(理想值—测量值)/2+当前磨损值=精加工磨损值公式推出:(500.03-498.86)/2+(-0.5)=0.085所以最终磨损值应为0.085mm西门子840D简明教程第三节:程序的测试与模拟西门子840D具有强大的图形仿真及交互帮助能力。
通过仿真可以检验那些没有绝对把握的程序,并可以在系统的提示下,把程序修改正确,是非常好用的功能。
在模拟环境中机床是被锁住的,但屏幕坐标照常运动,并有形象的3D模拟加工动画。
SIEMENS840D用户循环程序的编程方法
_
_
一
一
;¥PATH=/N CUS—DIR
PROC TUOY 1 (INT DI1一,REAL RAD1一,REAL RAD2 ,REAL 一
DEP_l,REAL ANG一,REAL PO_X,REAL PO_Y,REAL FEED一)SAVE
G00 X=RAD1 Y0 一
Z5.
G01 Z=DEP_1
G03 I=一RA D 1
一
G0Z5.M17
当 需 要 加 工 一 个 半 径 为 15 mm 、 深 为 3mm 的 槽
时 .主 程 序 如 -f:
% N AA MPF
一
—
—
T1
GoOX0Y0Z100S800M03F150 CA0_l(15,3)
程 的 方 法 。
关 键 词 :用 户 循 环 变 量 子 程 序 模块 化编 程 PLC
中 图 分 类 号:TP368.4
文 献 标 识 码:B
文章 编号 :1000—4998(2012)05—0059-03
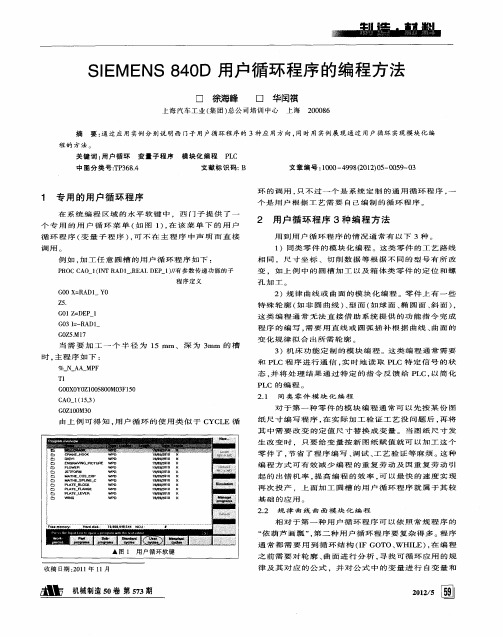
1 专 用 的 用 户循 环 程序
在 系 统 编 程 区域 的 水 平 软 键 中 ,西 门 子 提 供 了 一
机械制造 50卷 第 573期
2012/5
因 变 量 的 合 理 选 择 .最 后 借 助 循 环 结 构 把 公 式 和 相 关
指 令 按 合 理 的 工 艺 路 线 组 成 一 个 适 用 的 程 序 。 下 面 以
加 工 外 椭 圆 的 变 量 子 程 序 为 例 作 简 单 说 明 。
个 专 用 的 用 户 循 环 菜 单 (如 图 1),在 该 菜 单 下 的 用 户 循 环 程 序 (变 量 子 程 序 ),可 不 在 主 程 序 中 声 明 而 直 接
西门子数控编程840D2

常州精棱
15
• SUPA 程序段方式取消,包括编程的偏移、手轮 偏移(DRF)、外部零点偏移和 PRESET偏移。 G505 ... G599 调用第6到第 99可设定的零点偏移 。 功能 通过可设定的零点偏移 在所有轴中,工件零点以 基本坐标系中的零点为基准进行调节。这样可以 通过 G指令,在不同的程序之间调用不同夹具时 的零点。
常州精棱
30
• G1模态有效。在加工时必须给出主轴转速 S和主轴旋转方向 M3/M4。
常州精棱
31
• 加工一个槽:刀具沿 X/Y方向从起始点向终点运行。同时 在Z方向横向进给。 N10 G17 S400 M3 选择工作平面,主轴顺时针 N20 G0 X20 Y20 Z2 回到起始位置 N30 G1 Z-2 F40 刀具横向进给 N40 X80 Y80 Z-15 沿一条倾斜方向的直线运行 N50 G0 Z100 M30 空运转至刀具换刀
常州精棱
33
• G2 顺时针方向沿圆弧轨迹运行 G3 逆时针方向沿圆弧轨迹运行 CIP 通过中间点进行圆弧插补 CT 切线过渡的圆弧
常州精棱
28
• 编程: G1 X… Y… Z … F… G1 AP=… RP=… F… 参数说明 X Y Z 直角坐标的终点 AP= 极坐标的终点,这里指极角 RP= 极坐标的终点,这里指极半径 F 进给率,单位为毫米/分钟 功能 刀具用G1在与轴平行,倾斜的或者在空间里任意摆放的直 线方向上运动。可以用直线插补功能加工3D平面,槽等。
常州精棱
16
• 在此示例中有 3个工件,它们分别固定在随行夹具中并与 零点偏移值 G54到 G56相对应,一个一个进行加工。 N10 G0 G90 X10 Y10 F500 T1 返回 N20 G54 S1000 M3 调用第一个零点偏移,主轴右旋 N30 L47 程序运行,在此作为子程序 N40 G55 G0 Z200 调用第二个零点偏移Z,在障碍物之后 N50 L47 程序作为子程序运行 N60 G56 调用第三个零点偏移 N70 L47 程序作为子程序运行 N80 G53 X200 Y300 M30 零点偏移抑制,程序结束
840D操作扩展界面的编程与二次开发
第10章操作员扩展界面的编程与二次开发10.1 功能概述操作员扩展界面功能是基于MMC或PCU的一种系统自带的编程文件编译器,它是一种文本结构的语言,通过ASCII文件配置来实现,比如记事本或者HMI编辑器。
新编写扩展出来的操作界面存储在设计文件中,这些文件经过数控系统的HMI软件自动编译并显示在屏幕上结果,在供货时并不提供设计文件,必须由机床制造厂家或者使用户来实现这种界面的扩展和二次开发。
使用“操作员扩展界面”可以实现以下功能:(1)显示对话框并提供操作软键、变量和表格、文本和帮助文本、图形和帮助画面;(2)通过操作软键或者选择PLC实现调用对话框;(3)动态重组对话框,包括修改或删除操作软键、定义并设计变量栏、显示文本或图形、更换文本或图形、删除文本或图形;(4)用户通过不同的动作启动不同的响应;(5)实现对话框间的数据交换;(6)读写NC 变量、PLC 变量、用户变量并运算;(7)执行子程序、文件功能、PI服务以及外部功能;(8)根据用户组设计不同的保护等级。
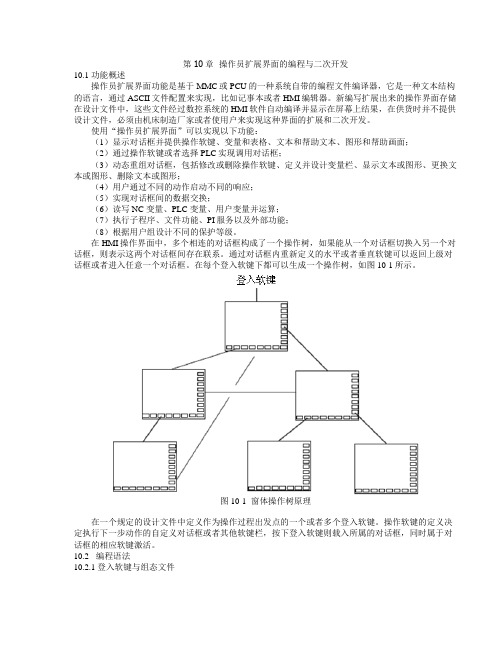
在HMI操作界面中,多个相连的对话框构成了一个操作树,如果能从一个对话框切换入另一个对话框,则表示这两个对话框间存在联系。
通过对话框内重新定义的水平或者垂直软键可以返回上级对话框或者进入任意一个对话框。
在每个登入软键下都可以生成一个操作树,如图10-1所示。
图10-1 窗体操作树原理在一个规定的设计文件中定义作为操作过程出发点的一个或者多个登入软键。
操作软键的定义决定执行下一步动作的自定义对话框或者其他软键栏,按下登入软键则载入所属的对话框,同时属于对话框的相应软键激活。
10.2编程语法10.2.1 登入软键与组态文件在数控系统的缺省HMI界面上有空白软键,机床制造厂家或者用户可以给这些空白软键自行定义其功能,如表10-1所示。
在相应的COM文件中,可以定义操作软键的显示文本或图形标签,当这些软键按下时,系统会自动搜寻固定文件名的组态文件,通过组态文件内部的编程,形成用户个性化的界面,并显示在HMI界面上。
840DNC高级编程简单介绍
840DNC高级编程简单介绍步骤;1、定义变量2、定义宏程序3、编制子程序4、编制主程序今天先先讲定义变量例如:语句:DEFNCKBOOLACD含义:在NCK范围内有效的全局变量,变量名为ABC的BOOL变量步骤:1、在HMIADVANCED 的安装目录下的DH目录中有一个DEF.DIR目录你可一在此目录中用文本编辑器建立MGUD.DEF文件〔机床制造商全局变量〕在此文件中写入如上所定义的变量。
2、加载变量到NC中。
此步骤和加载加工程序的步骤一样。
HD——NC只只是是操作时必须在service——data manage下进行。
如今变量就差不多生效。
NC高级编程特别适用于加工零件单一的多工位组合机床。
这种机床可能PLC和NC之间要交换许多数据,也有可能加工尺寸使用测量仪来保证。
常用的功能:1、中断2、同步动作1、中断例如:Setint(1)Prio=1LIFT_02此语句的作用:当NC的第一个快速输入为“1”时,正在运行的程序被中断,NC自动调用LIFT_02子程序。
NC快速输入在NC中何时起作用。
有两种方法:1、软件生效,PLC中直截了当置位DB10中对应的位。
如今即使硬件上并没有输入“1”信号,在NC中此信号也是生效的。
2、硬件生效,硬件上直截了当输入“1”信号,此方法响应速度最快,上面的例子中第一个NC快速输入的硬件输入在NCU上的X121上,具体哪一个针脚参考配置手册。
程序LIFT_02 能够在子程序目录,主程序目录,标准循环目录、制造商循环目录,只要加载到NC中,NC会自动在上述目录中查找。
中断程序能够实现刀具的监控,测量到后退刀等功能。
在NC高级编程中经常要读写PLC变量。
1、$A_IN[]或$A_OUT 语句:读取或写NC的快速输入输出。
假如没有硬件上的输入输出,那么在NC中确实是读取或写DB10中的对应位2、$A_DBB[]此语句的含义:读取PLC变量。
例如$A_DBB[112]读取NC内存区域中的DBB112 ,此区域的大小在做内存配置时被指定。
西门子840D编程学习

时间:二O 二一年七月二十九日第一章基本知识之阿布丰王创作1.1 机床运动方式 轴的运动方式对一般的铣削和钻削机床,轴的线性运动具有下列方式:a. 工作台的左/右运动b. 工作台的上/下运动c. 切削头的前/后运动卧式铣削机床轴的线性运动与之非常相似,这些类型的机床经常配置附加的旋转工作台.对5轴机床,切削头也可以作旋转运动.对车床,刀具通常在两个方向的直线移动就能满足要求. 直线运动轴的命名 一般用字母X 、Y 、Z 来命名各个线性运动轴的运动方向.a. X 轴:工作台的左/右运动b. Y 轴:工作台的前/后运动c. Z 轴:工作台的上/下运动每一个线性运动轴相对应有一个旋转运动轴,旋转运动轴用下列字母暗示:a. A 轴:围绕X 轴的旋转运动b. B 轴:围绕Y 轴的旋转运动c. C 轴:围绕Z 轴的旋转运动对只有两个线性运动轴的车削机床用下列方法来描述刀具的运动:刀具的横向运动通常叫作X 轴,刀具的纵向运动通常叫作Z 轴.刀具的相对运动铣削机床的加工无论是靠刀具的运动还是靠工作台的运动来满足加工要求.在数控加工技术中,通常假定刀具总是运动的.把持者不用考虑机床运动的具体执行方式.这种假定方法也适用于其它分歧类型机床的法式运行.位置数据机床运动可以通过编程使某一指定轴达到指定位置.例如:X100这暗示工作台在X方向移动100mm,或者说是刀具相对工件在X方向移动100mm.也可以通过法式来实现多轴联动.例如:X100 Y1001.2 工件位置暗示机床坐标系机床必需指定一个线性运动轴在相应方向运动的参考坐标系,以使机床或切削控制在指定位置成为可能.通常以字母X、Y、Z轴构成的直角坐标系来描述.依照标准DIN 66217的规定,机床刀具运动用右手直角笛卡儿坐标系来描述,坐标系的交点叫零点或原点.有时机床工作需要甚至必需用负的位置坐标数据,原点以左的位置坐标通过在坐标数据前冠以“—”号暗示.位置界说为了界说一个位置,假定沿着坐标轴遵循一定的规则.那幺现在就可以用指定的坐标方向(X、Y、Z向)及三个资料描述坐标系上的每一点.原点坐标为X0、Y0、Z0.例如:为了达到简化的目的,我们在这个例子中只用坐标系的一个平面如XY平面来说明.图中的P1点至P4点用下列坐标值来暗示:P1 X100 Y50P2 X-50 Y100P3 X-105 Y-115P4 X70 Y-75在铣削把持中,进给深度也必需描述出来,另外,我们需要界说第三坐标轴的值(在这种情况下是Z轴).例:图中的P1至P3点在这个例子中用下列坐标界说:P1 X10 Y45 Z-5P2 X30 Y60 Z-20P3 X45 Y20 Z-15极坐标系在坐标系中用点的坐标来界说点的方法叫“笛卡儿坐标”.这儿还有另外一种界说点的方法叫做“极坐标”.无论是工件还是工件的一部份用半径和角度来丈量的尺寸暗示点的位置的方法叫做“极坐标”.例如:图中的P1点至P2点用参考极点的坐标值来描述其位置.P1:半径100角度30°P2:半径60角度75°绝对坐标系在绝对坐标系中,所有点的坐标都是参考坐标系原点而来的,适用于刀具的运动.它的含义为:用绝对坐标值描述的位置是刀具将要达到的位置.例如:图中的P1点至P3点的绝对坐标为:P1 X20 Y35(相对原点的坐标值)P2 X50 Y60(相对原点的坐标值)P3 X50 Y60(相对原点的坐标值)相对坐标系在加工图样中,经经常使用到相对坐标.它的尺寸不是参考坐标系的原点,而是参考工件上另外一点的坐标而得来的.为了防止这类尺寸之间的转换,采纳相对坐标来界说点的坐标就可以解决这一矛盾.相对坐标是参考前一点的位置,适用于刀具的运动,它的含义是:用相对坐标值描述的是刀具移动的距离.例如:图中的P1点至P3点的相对坐标是:P1 X20 Y35(相对原点的坐标值)P2 X30 Y20(相对P1点的坐标值)P3 X20 Y-35(相对P2点的坐标值)平面界说一个平面用两个坐标轴来界说,第三个坐标轴垂直于这个平面,决定刀具进给的方向.在编程过程中,为了能计算刀具的偏移量而设定工作平面是需要的.这个平面和某种类型的循环编程及极坐标也有一定的联系.工作平面在NC法式中用G17、G18、G19指令来界说.工作平面界说指令进给方向XY G17 ZZX G18 YYZ G19 X 1.3 坐标系统的设定坐标系概述我们应该区分下列坐标系:a.机床坐标系b.基本坐标系c.零件坐标系d.以后零件坐标系在机械运动学中,编程中经常使用到坐标系的转换.注:本小节中关于特殊轴界说的说明见轴的类型一节.机床坐标系机床坐标系由机床实际存在的所有轴组成.刀具和工作台改变的参考点在机床坐标系中被界说.当机床坐标系用于编程(这在一些G功能的应用中是可能的)时,机床的物理轴直接用其地址.不允许参考于工作坐标系而得来.机床坐标系的设定与机床的类型有关,坐标轴的方向遵循右手的“三手指规则”(根据标准DIN66217).具体的做法是:站在机床前面,右手的中指指向机床主轴远离进给的方向,然后根据下面方法确定:a.拇指指向+X方向b.食指指向+Y方向c.中指指向+Z方向事实上,随着机床类型的分歧,坐标系看起来也有很年夜区别.基本坐标系基本坐标系是一个“笛卡儿”坐标系,这个“笛卡儿”坐标系是机床坐标系经过运动转换后而得来的.假设没有运动转换,则基本坐标系与机床坐标系的唯一区别是关于轴的指定上.零点偏置、比例变换等都是在基本坐标系上完成的.界说工件加工的工作区域的坐标也是参考基本坐标系指定的.零件坐标系零件的几何特征是在零件坐标系中描述的.换句话说,数控法式中的资料是参考零件坐标系确定的.零件坐标系是一个“笛卡儿”坐标系而且标识于指定零件上的坐标系.矩阵概念概述矩阵概念是一个“笛卡儿”坐标系转换为另一个“笛卡儿”坐标系的自界说算术规则.在一个矩阵中包括下列变换功能:a.坐标系的零点偏置(平移)b.坐标旋转c.坐标镜像d.比例变换这些变换功能可以独自运用,也可以综合运用.零件坐标系与机床轴的关系零件坐标系的位置与基本坐标系(或机床坐标系)的关系通过矩阵变换编程来决定.在NC法式中通过如G54等指令调出或激活零件坐标系.以后工件坐标系有时在一个法式中,工件需要重新定位和旋转、镜像或比例缩放而设置新的工件原点.在工件坐标系中,矩阵变换编程经常使用于在一个合适的位置重新设置以后的工件原点以便于重新定位(旋转、镜像或比例缩放).在同一个法式中,允许设置若干个零点偏置. 1.4 轴的类型主坐标轴(几何坐标轴)主坐标轴界说一个右手坐标系,刀具在这个坐标系中通过编程实现运动.在数控加工技术中,主坐标轴被称为几何轴.在这本编程手册中经常使用这种说法.对车削类机床,经经常使用到X轴和Z轴,有时也用到Y轴.对铣削类机床,经经常使用到X轴、Y轴、Z轴.附加坐标轴相对几何轴而言,把没有一定几何关系的坐标轴界说为附加坐标轴.例如:车床转塔刀架的位置轴U,尾座轴V.第一主轴(主切削轴)机床加工运动中起决定切削作用的主轴被称为第一主轴.这根主轴在机床数据中被称为主切削轴.根据规定,主切削轴与第一主轴的说法等效.注:这种主轴的分配可以通过指令SETMS(主轴数字)(详见第5节中的有关说明)来改变.特定功能如螺纹切削运用这根主轴来完成.指令:S或S0辅助主轴机床加工运动中起辅助切削作用的主轴被称为第一主轴.指令:S1,S2,S3,S4轴的类型在编程时注意区别下列类型的轴:a.机床轴b.通道轴c.几何轴d.附加轴e.路径轴f.位置轴g.联动轴机床轴机床轴的名称在机床数据中被设定.标准名称:X1、Y1、Z1、A1、B1、C1、U1、V1也可以用下列标准名称来描述:AX1、AX2、……、Axn.通道轴在一个通道内的运动轴叫做通道轴.界说:X、Y、Z、A、B、C、U、V几何轴(直角坐标系)第二章数控法式编制的基本规则2.1 数控法式语言的构成元素文字设置下列文字在数控法式中是有效的.年夜写字母:A、B、C、D、E、F、G、H、I、J、K、L、M、N、(O)、P、Q、R、S、T、U、V、W、X、Y、Z.小写字母:a、b、c、d、e、f、g、h、i、j、k、l、m、n、o、p、q、r、s、t、u、v、w、x、y、z.注:年夜、小写字母之间没有明显的区别.阿拉伯数字:0、1、2、3、4、5、6、7、8、9.特殊字符:字符含义% 法式开始字符(只用于外部的PC法式编制)(用于参数或注释的符号)用于参数或注释的符号[ 用于索引或地址的括号] 用于索引或地址的括号< 小于> 年夜于:主法式段= 赋值,即是/ 除;法式段跳过执行* 乘+ 加- 减“双引号;字符串标识表记标帜‘单引号;特殊数值标识表记标帜;十六进制数$ 系统数据标识表记标帜_ 下划线,字母属性?保管(暂不指定)!保管(暂不指定). 小数点, 逗号,参数分隔符;说明、注释开始& 文字格式,与空格字符相同Lp 法式段结束Tab 分隔符space 分隔符(空白)注:无打印字符可作为空白字符.功能字数控法式是由法式段组成的,每一个法式段是由功能字组成的.数控语言中的一个功能字包括一个地址字符和一个数字或表达一个数值的数字变量.这个功能字的地址字符通常是一个字母.数字变量可以包括一个引导标识表记标帜符和一个十进制小数.这个引导字符总是呈现在地址字符和数字变量之间.正的引导字符(+)可以省略不写.2.1.2.1 地址功能字地址有固定地址或可变地址.例如轴(X、Y、Z)、主轴转速(S)、进给速度(F)、圆的半径(CR)等等.2.1.2.2 模态地址/非模态地址在编程中,同一地址在呈现新的数值以前一直有效的地址叫做模态地址.模态地址在编程中,同一地址直到呈现新值的法式段以前一直有效.非模态地址只在本法式段内有效.2.1.2.3 轴的引申地址在轴的引申地址中,坐标轴名称拔出在地址后面的中括号内.这个坐标轴名称代表这根轴.例如:FA[U]=400;指定轴U的进给速度.2.1.2.4 扩展地址扩展地址使在一个系统中同时存在几个坐标轴和几个主轴称为可能.一个扩展地址由一个具有引申意义的数字或由一个包括在中括号中的有效名称和一个有“=”的算术表达式组成.例如:X7 不需要“=”,7是一个数值,但在这儿有一个“=”号也是允许的.X4=20 将值赋给X4轴(需要“=”)两个字母的地址(需要“=”)M3=5 3#主轴停止扩展地址暗示法只有在下列直接地址中允许使用.X、Y、Z…轴地址I、J、K 增量参数S 主轴转速SPOS,SPOSA 主轴位置M 辅助功能H 辅助功能T 刀具顺序号F 进给速度在扩展地址暗示法中的数字(指针)可以通过一个有效的M、H、S地址及SPOS和SPOSA来取代.这个有效的地址名称置于中括号中.例如:S[SPINU]=470 SPINU主轴的转速为470rpmM[SPINU]=3 SPINU主轴顺时针旋转T[SPINU]=7 SPINU主轴选择刀具2.1.2.5 系统固定地址下列地址是系统固定的地址.地址含义地址含义D 刀具偏置号N 子法式F 进给功能P 法式编号G 准备功能R 参数变量H 辅助功能S 主轴转速L 子法式调用T 刀具顺序号M 辅助功能:主法式法式举例:N10 G54 T9 D2引申轴的固定地址:地址含义AX 轴值(在轴的法式段中可以变动)ACC 轴的加速度AF 轴的进给FDA 轴的手轮进给倍率FL 轴的进给速度限制IP 插补参数OVRA 轴的进给倍率POS 轴的定位PO 多项式系数POSA法式举例:N10 POS[X]=100当用引申轴编程时,这根线性运动轴置于封闭的中括号内.2.1.2.6 地址变量地址也可以用一个地址字母(或地址字母以外的具有引申意义的数字)或者一个空余的符号界说.变量地址在一个法式的控制中必需是唯一的.相同的地址名称不允许用于分歧类型的地址.注意下列地址类型的区别:a.轴值和终点地址b.插补参数地址c.进给速度地址d.迫近位置地址e.丈量地址f.轴和主轴的地址g.……变量地址字母有:A、B、C、E、I、J、K、Q、U、V、W、X、Y、Z.用户在机床数据中可以改变这些变量地址的具体含义.例如:X1,Y30,U2,I25,E25,E1=90,……具有引申意义的数字序号由一个或两个数字构成,它总是固定的.2.1.2.7 地址名称这种地址的标识表记标帜可以通过增加具有特征含义的字母加以扩展.例如:CR 圆弧半径SPOS2.1.2.8 把持/算术功能2.1.2.9 地址赋值在编程中,可以给地址赋一个值.赋值的类型根据地址名称的类型而定.在下列情况下,在地址名称和数值之间必需拔出一个“=”号.a.地址名称由一个以上字母组成.b.数值由一个以上常量组成.如果地址名是一个单一的字母和数值只有一个常量,则“=”号可以省略.在地址字母的后面加引导字符和分隔符也是允许的.例如:X10 将数值10赋给地址X,不需要“=”号.X1=10 将数值10赋给地址X1,需要“=”号.FGROUP(X1,Y2)通过二维数组参数赋值AXDATA[X1]AX[X1] 在法式中间接地将地址X1的值赋给地址AX.X=10*(5+SIN(37.5)) 通过带有“=”号的算术表达式赋值.2.1.2.10 重要地址2.1.2.11 地址名称地址名称也可以用一个单词来描述(根据标准DIN66025),在同一个NC法式中,这个单词具有相同的含义,这个地址名称必需是唯一的.同一个地址名称不能用于其它的地址.地址名可以代表下列含义:a.变量—系统变量—用户变量b.常量c.关键词d.一些字母暗示的DIN地址e.跳转标识表记标帜构陈规则:a.一个地址名可以由32个以内的有效字符组成;b.下列字符有效:i.字母ii.下划线iii.数字c.开头两个字符必需是字母或下划线,编程时把持符号不能插在分隔符之间(见后述).例如:CMIRROR,CDON注意:留作专用的关键词不能用于地址名称,在分隔符之间禁止使用把持符号.屏幕显示对字符数量有一定的限制,在标准显示配置下,有下列限制:a.法式名:24个字符b.轴名:3个字符c.变量名:32个字符地址名称分配规则为了防止地址名称之间发生抵触,故提供以下遵循规则:a.所有的以CYCLE或下划线开始的地址名称留作SIMENS循环用.b.所有的以CLS开头的地址名称留作SIMENS编纂循环用.c.用户编纂循环的地址名称以CC开头.d.我们建议用户选择以字母U或某种下划线以及分歧于系统、编纂循环和SIMENS循环开头的地址名称.2.1.2.12 变量名在用于系统的变量中,开头字符采纳“$”符号.这个字符不能用于用户界说的变量.例如:$P_IFRAME ,$AC_F在用引申含义的数字暗示的变量中,零可以忽略不写.(例如R01可以用R1取代).2.1.2.13 矩阵名基本变量命名规则也适用于矩阵命名.以矩阵名称暗示的算术变量也是有效的.例如:R(10)=……2.1.2.14 数据类型一个变量可由某一个数值(或一些数值)或一个字符(或几个字符)组成,例如一个地址字母.数据允许的类型由界说的变量类型决定,系统变量和预界说的变量数据类型的关系是确定的.使用二维阵列.常量a.整数常量有引导字符或没有引导字符的整数.例如将一个数值赋给一个地址.例如:X100 将值+100赋给X轴Y-100 将值-100赋给Y轴b.实数常量实数例如十进制小数,有或没有引导字符的实数,例如将一个数值赋给一个地址.例如:X10.25 将值赋给轴XX-10.25 将值赋给轴XX0.25 将值赋给轴XX.25 X,“0”可以省略X=-.1EX-3 将值×X注:十六进制常量常量也可以在十六进制格式中用十六进制数暗示.字母“A”到“F”分别代表数字“10”到“15”.十六进制常量用单引号暗示,起始字母为“H”,后面跟十六进制数.字母和数字间也可以使用把持符.例如:SMC_TOOL_MANAGEMENT_MASK=‘HFFFF’将十六进制的数值赋给机床数据.字符的数量受到整数类型数据取值范围的限制.二进制常量常量在二进制格式中也可以使用二进制数来暗示.在这种情况下,只使用数字“0”和“1”.二进制常量用单引号暗示,起始字母为“B”,后面跟二进制数.字母和数字间也可以使用把持符.例如:SMN_AUXFU_GROUP_SPEC=‘B1000001’ 0到7位赋值.字符的数量受到整数类型数据取值范围的限制.法式段和法式结构一个NC法式由各个自力的NC法式段组成,一个NC法式段一般由各功能字组成.一个NC法式段包括一个把持步伐的所有需要的数据和一个检拆字符“LF”(换行).注:“LF”字符不用手动拔出,它一般在你改变行的时候自动生成.2.1.3.1 法式段长度一个法式段最多包括242个字符(包括注释和结束字符“LF”在内).注:在以后的把持法式显示区,一般可以显示三个法式段,每一个法式段不超越66个字符,注释也显示出来.在独自的信息显示区显示机床把持信息.2.1.3.2 法式段中各个功能字的顺序为了保证法式段结构的清晰性,法式段中功能字一般按下列顺序排列.例如:N10 G__ X__ Y__ Z__ F__ S__ T__ D__ M__ H__各功能字说明(例如G__,H__,M__)2.1.3.3 主法式段/子法式段在NC法式中,有两种法式段.a.主法式段b.子法式段在以主法式段开始的NC法式部份中,主法式段必需包括所有的完成把持所需要的信息的功能字.注:主法式和子法式之间也可包括主法式段,在此,控制系统不检测主法式段中是否包括所有的完成把持所需要的信息.一个子法式段包括每一个把持步伐的所有需要的信息.2.1.3.4 NC法式段的顺序号主法式段通过一个主法式段序号来界说.一个NC主法式段的顺序号包括字符“:”和一个整数(法式段顺序号),这个法式段序号总是呈现在法式段的开始.注:主法式段顺序号在一个法式文档中必需是唯一的.例如::10 D2 F200 S900 M3子法式段通过一个法式段顺序号来界说.一个NC子法式段的顺序号包括字符“N”和一个整数(法式段顺序号),这个法式段顺序号总是呈现在法式段的开头.例如:N20 G1 X14 Y35N30 X20 Y40为了当系统搜索法式时,只有唯一的结果,子法式段顺序号在一个法式中必需是唯一的.注:主法式段顺序号是任意的,建议采纳递增的顺序号.根据实际情况,在法式中也可以不使用法式段顺序号.2.1.4 NC法式构成一个NC法式由一个主法式段和若干个子法式段构成.例如::10 D2 F200 S900 M3N20 G1 X14 Y35N30 X20 Y40N40 Y-10在任何法式运行时,不需要执行的法式段可以跳过.跳过不需要执行的法式段通过在该法式段前用字符“/”指定.一些连续执行的法式段也可以跳过执行,跳过的法式段部份不执行,下一个没有跳过的法式段继续执行.例如:N10 ……执行/N20 ……跳过N30 ……执行/N40 ……跳过/N50 ……跳过/N60 ……跳过N70 ……执行注:跳过的法式段自己可以通过用户或控制器控制执行.为了控制法式的执行,系统和用户变量也可以用于条件跳转.也可用“;”来取代“/”,效果一样.2.1.4.1 跳转标识表记标帜在一个NC法式中,可以用一个标识表记标帜来暗示跳转.注:在高级编程指南中你将见到更详细的说明.跳转标识表记标帜名由至少2个最多32个字符(字母、数字、下划线)组成,开头两个字符必需是字母或下划线,跳转标识表记标帜后跟一个“:”号.注:在一个NC法式中跳转标识表记标帜必需是唯一的.跳转标识表记标帜总是在法式段的开头.如果法式段存在序号,则跳转标识表记标帜在法式段序号后面.2.1.4.2 注释部份为了便于其它用户和NC编程人员更容易地舆解NC法式,建议在法式段中加入相应的编制意图注释.注释拔出在法式段的结尾,用一个“;”号把注释部份与NC法式段的加工法式部份分开.例如:N10 G1 F100 X10 Y20;NC法式段的注释或N10;Qianyi jingying xuexiban.N20;qukai 2010-11-24N50;ci kong yi jia gong.注释可以存贮和在法式运行时显示在以后的法式显示区内. 2.2 NC法式结构和内容一个NC法式或零件法式由一系列的描述数控机床刀具连续加工过程的NC法式段组成.有一个关于法式结构的标准是DIN 66025标准.这个法式也叫做“零件法式”,因为它包括一个零件加工的全部所需指令.一个NC法式或零件加工法式使工件通过数字控制机床刀具自动运行进行加工成为可能.注:法式名的命名规则一个法式的名称从文件中得来.一个法式名称可以由不超越32个字符(字母、数字、下划线)组成.但不包括一些分割符号.头两个字符必需是字母.例如:MPF100WELLE只有法式名称的前24个字符可以显示.在把持指南中你将见到更详细的法式存储方面的说明.子法式名在标准DIN 66025有关子法式命名的规定中,可以在具有引申意义的数字前面冠以字母“L”“l”(年夜写和小写)作为子法式名,引申数字前有无“0”字符是有区另外.例如“L01”和“L1”所表达的含义是纷歧样的.法式结束在法式的最后一个法式段必需有暗示“法式结束”的标识表记标帜.这些标识表记标帜有M2、M30、M17或RET.例如:N10 ……N20 ……N90 M2;最后一个法式段ORN90 M30;最后一个法式段ORN90 M17;最后一个法式段ORN90 RET;最后一个法式段法式信息为了提供给用户的关于以后法式运行的机床状态信息也可以编制到法式傍边去.在NC法式中,信息通过拔出键盘字“MSG”和后面跟一个含有用双引号标识表记标帜的信息文本内容的“()”暗示.信息也可以通过法式“MSG()”清除.例如:N10 MSG(“Roughing Contour”)拔出加工信息N20 X__ Y__N……N90 MSG();清除N10中的信息报警设置你也可以在NC法式中设置报警信息.报警信息在显示器的一个独自区域显示.在控制过程中报警装置和它所接受到的信号之间的联系取决于报警方式.可以通过拔出键盘字“SETAL”和后面跟一个含有报警信息序号的圆括号的法式段报警.报警顺序号的有效范围为60000~69999.其中序号60000~64999是留作SIEMENS循环犯错使用的.报警信息总是通过一个独自的法式段设置的.例如:N100 SETAL(65000);设置报警号为65000的报警信息第三章刀具运动编程3.1 界说初始条件概述在这一节中,你将了解到一般呈现在NC法式开头的经常使用命令介绍.这些功能的组合方式其实不是单一的一种方式,例如:工件平面的选择也可以在NC法式中设置在另一点.这一节和下面的几节让我们来谈一谈一个NC法式的惯例结构.我们在这儿首先讨论的法式的开始部份.绝对/相对坐标尺寸编程,G90/G91编程法式格式绝对坐标尺寸编程G90或X=AC(__) Y=AC(__) Z=AC(__)相对坐标尺寸编程G91或X=IC(__) Y=IC(__) Z=IC(__)参数说明X Y Z 直线运动轴的名称=AC 绝对坐标尺寸(非模态)=IC 相对坐标尺寸(非模态)功能G90/G91指令和非模态的坐标尺寸AC/IC用于界说系统达到设置点的方式.绝对坐标尺寸,G90坐标尺寸是参考激活的坐标系原点而得来的坐标尺寸.法式中点的坐标暗示刀具将要达到点的位置.例如:在工件坐标系中.相对坐标尺寸,G91坐标尺寸是相对刀具已经达到的最后一点的坐标.你将以刀具要移动的距离来编程.非模态的绝对尺寸和相对尺寸,AC/IC当G91被激活时,AC可以被用于在指定法式段中允许某根轴可以独自采纳绝对尺寸编程.当G90被激活时,IC可以被用于在指定法式段中允许某根轴可以独自采纳相对尺寸编程.备注:指令G90、G91一般应用于所有轴在后续的法式段中有效的编程情况.两者均为模态指令.法式举例:刀具移动的通道在绝对坐标系中是以工件的零点为参考点的.圆弧插补中心点坐标I和J在绝对坐标系中的每一个法式段中被指定,圆的中心点坐标用相对尺寸编程,而不考虑G90/G91的状态.N10 G90;绝对尺寸编程N20 G0 X45 Y60 Z2;达到起始点N30 G1 Z-5 F500;刀具进给N40 G2 X20 Y35 I=AC(45) J=AC(35);圆弧中心点的绝对坐标旋转轴绝对尺寸(DC、ACP、ACN)编程法式格式A=DC(__) B=DC(__) C=DC(__)或A=ACP(__) B=ACP(__) C=ACP(__)或A=ACN(__) B=ACN(__) C=ACN(__)参数说明A B C 将要运动的旋转轴名称。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
使用Φ200铣刀加工900×2000平面XPMN05 G00 G17 G54 G90 Z200 N10 X-110 Y90N15 M3 S150 F500/N20 GOTOF AAAN25 Z4N30 G01 X2000N35 Y270N40 X0N45 Y450N50 X2000N55 Y630N60 X0N65 Y810N70 X2000 N75 G00 Z100N80 X-110 Y90 AAA:Z0N85 G01 X2000N90 Y270N95 X0N100 Y450N105 X2000N110 Y630N115 X0N120 Y810N125 X2000N130 G00 Z100 M05 N135 M02图17利用无限循环,使用Φ200铣刀加工900×2000平面XPM1N05 G00 G17 G54 G90 Z200N10 X-110 Y90N15 M3 S150 F500N20 Z4N25 AAA: G01 X2000N30 Y=IC(180)N35 X0N40 Y=IC(180)N45 GOTOB AAAN50 M02图18(2)条件转向条件语句形式为:“IF 条件表达式 GOTOB/GOTOF 跳转标记名”。
当条件满足,程序将会跳转到指定的目标。
条件表达式所用的条件运算符包括: ==(等于)、<>(不等于)、>(大于)、>=(大于等于)、<(小于)、<=(小于等于)、AND 与、OR 或、NOT 非、XOR 异或。
例如:使用变量编程加工抛物线 Y=0.5X2图19PWXR1=10G00 G54 G90 Z100X10 Y50M3 S1000 F200Z0AA: R1=R1-0.1G01 X=R1 Y=POT(R1)/2 IF R1>-10 GOTOB AA G00 Z100 M5M02左下角为:X0、Y0 上面为:Z0Φ20铣刀加工螺旋铣孔XK N05 T1N10 G00 G54 G90 Z200N15 M03 S2000 F500; 1N20 TRANS X100 Y100N25 R1=35N30 XK1N35 TRANS; 2N40 TRANS X100 Y900N45 R1=35N50 XK1N55 TRANS; 3N60 TRANS X750 Y900 N65 R1=30N65 XK1N70 TRANS; 4N75 TRANS X750 Y100 N80 R1=30N85 XK1N90 TRANS; 5 TRANS X1400 Y100N100 R1=25N105 XK1N110 TRANS; 6TRANS X1400 Y900N120 R1=25N125 XK1N130 TRANSG00 Z200 M05M02子程序XK1X0 Y0Z5G01 G41 X19 D1Z0G03 X19 Y0 Z-20 I-19 J0 TURN=9G03 I-19G01 G40 X0G00 Z5G01 G41 X=R1 D1Z0G03 X=R1 Y0 Z-20 I= -R1 J0 TURN=9G03 I= -R1G01 G40 X0G00 Z200M17ZK(钻孔)N05 G00 G54 G90 Z100N10 X0 Y0N15 M03 S500 F100N20 MCALL CYCLE83(100,0,5,-55,,-8,,2,,,1)N25 HOLES2(0,0,300,100,10,35)N30 MCALLN35 G00 Z100 M05M02GS(攻丝)N05 G00 G54 G90 Z100N10 X0 Y0N15 M03 S50 F125N20 MCALL CYCLE840(100,0,5,-55,,,4,3,1)N25 HOLES2(0,0,300,100,10,35)N30 MCALLN35 G00 Z100 M05M02椭圆参数方程:X=30×COS(Θ) Y=20×SIN(Θ)程序如下O0001R1=0N005 G00 G54 G90 Z100N010 X60 Y0N015 M03 S600 F500N020 Z-5N025 G42 X45 Y-15N030 G02 X30 Y0 CR=15AA: R1=R1+1N035 G01 X=30*COS(R1)Y=20*SIN(R1)N040 IF R1<360 GOTOB AAN045 G02 X45 Y15 CR=15 N050 G00 G40 X60 Y0N055 Z200 M05M30G54 X0 Y0 孔中心,Z0 上表面。
R4:角度变量(0°~90°)X=17-COS(R4)*6Z=6*(SIN(R4)-1)程序DYJ(倒圆角)N05 R4=0N10 G00 G54 G90 Z100N15 X0 Y0N20 Z3 M03 S4000 F1000AA:R4=R4+2N25 G01 Z=6*(SIN(R4)-1)N30 X=17-COS(R4)*6N35 G02 I= COS(R4)*6-17 N40 IF R4<90 GOTOB AAN45 G00 Z100 M05N50 M02程序(使用变量)DYJ(倒圆角)R1=倒角孔直径R2=倒角圆半径R3=刀半径R4=角度变量N05 G00 G54 G90 Z200N10 X0 Y0N15 Z3 M03 S4000 F2000AA:R4=R4+2N20 G01 Z=(SIN(R4)-1)*(R2+R3)N25 X=R1/2+R2-COS(R4)*(R2+R3)N30 G02 I=COS(R4)*(R2+R3)-R1/2-R2 N35 IF R4<90 GOTOB AAN40 G00 Z100 M05M02XYZN05 T1 G17N10 R1=0.01 R2=0N15 G00 G54 G90 Z100N20 X40 Y0N25 Z=R2N30 M3 S2000 F1000 AA: G01 G42 X=R1 D1N35 G03 I-R1N40 R1=R1+0.5 R2=R2-1 N45 G40 G01 X=40 Z=R2N50 IF R1<25 GOTOB AA N55 G00 Z100 M5M02设定;Φ20中心为X0、Y0。
25尺寸右端为Z0。
使用Φ20、R0.8平面铣刀加工。
程序:AAAN05 T1N10 G00 G54 G90 Z100N15 X0 Y0N20 M03 S3000 F500N25 Z5N30 G01 G41 X10 Y0 D1N35 Z0N40 G02 X10 Y0 Z-15 I-10 J0 TURN=14 N45 I-10N50 G01 G40 X40N55 Y5N60 R1=0 BB:R1=R1+0.5N65 Z=-15-COS(R1)×10N70 G01 G41 X=10+SIN(R1)×10 D1 N75 Y0N80 G02 I=-10- SIN(R1)×10N85 G01 Y-5N90 G40 X40N95 Y5N100 IF R1<90 GOTOB BBN105 G00 Z100 M05M02SRN05 R1=10(圆半径)N10 R2=4(刀半径)N15 R3=30(坐标旋转)N20 R10=0 (变量)N25 G00 G19 G54 G90 Z200N30 ROT Z=R3N35 X101 Y=-R1-R2N40 M3 S2000 F1500N45 Z=R1+5N50 G01 Z=-R2II:R10=R10-0.2N55 G01 X=101+R10N60 G02 Y=R1+R2 CR=R1+R2 N65 R10=R10-0.2N70 G01 X=101+R10N75 G03 Y=-R1-R2 CR=R1+R2 N80 IF R10>=0 GOTOB IIN85 ROTN90 G00 G17 Z200 M05M02DYJN05 T1N10 R1=30 R2=2 R3=4 R4=0N20 G00 G54 G90 Z200N25 X=R1+R3+3 Y5N30 M03 S3000 F2000N35 Z2AA:R4=R4+1.5N40 $TC_DP6[1,1]=(R3+R2)×COS(R4)-R2 N45 G01 Z=(R2+R3)×(SIN(R4)-1)N50 G42 X=R1 D1N55 Y20N60 G03 X20 Y30 CR=10N65 G01 X0N70 Y0N75 X30N80 Y5N85 X=R1+$TC_DP6[1,1]N90 IF R4<=90 GOTOB AAN95 G00 Z200 M05M02QQQN05 CFTCPN10 R1=0N15 G00 G54 G90 G64 Z100 N20 X60 Y-60N25 M03 S3000 F2000AB:R1=R1+3N30 R2=SIN(R1)×6N35 R3=COS(R1)×6N40 $TC_DP6[1,1]=(R2-2)N45 G01 Z=R3-6N50 G42 X34 D1 N55 Y0N60 G03 X0 Y34 CR=34 N65 X0 Y26 CR=4N70 G02 X-26 Y0 CR=-26 N75 G03 X-34 CR=4N80 G03 X34 Y0 CR=34 N85 G01 G40 X60N90 Y-60N95 IF R1<90 GOTOB AB N100 G90 G0 Z150 M05 M30。