附录1-模块参数
Tricon简介-6.1 附录1
1.数据类型1.1 可用于输入输出的数据类型:BOOL 占 1Bit 开关量DINT 32Bit整形量,模拟量输入卡进入系统的是机器码,因此要用本数据类型。
REAL 32Bit 实型量,对于脉冲输入要用本数据类型。
1.2 用于其他各种量(常量、本地变量)的数据类型:DATE 64Bit日期型,语法格式:D#CCYY-MM-DDDT 64Bit日期时间型,格式:DT#CCYY-MM-DD-HH:MM:SS,秒可以有3位小数DWORD 64Bit字符型INT 32Bit整型LREAL 64Bit长整型STRING 字符串型,长度为136Bytes,最多132个字符。
TIME 64Bit时间型,格式:T#DdHhMmSsMSms (其中大写字母用具体数字代替,可以有小数;小写字母为格式所要的关键字,例如T#2.5h或T#2h30m) TOD Time Of Date 用时间表达的日期数据,格式:TOD#HH:MM:SS 秒可以有3位小数。
2.FUNCTION2.1 运算类:ADD 加SUB 减MUL 乘DIV 除MOD 模除,输出余数AND 逻辑与OR 或NOT 非XOR 异或(二进制不进位加法)GT 大于LT 小于GE 大于等于LE 小于等于EQ 等于NE 不等于CEIL 取整(进位法,例y=CEIL(x), x=6.01, y=7)FLOOR 截尾取整LIMIT 限幅ABS 绝对值SQRT 平方根2.2 函数类:EXP 自然指数LN 自然对数EXPT 指数LON 以10为底对数MAX 求一组输入中的最大值MIN 最小值MEDSEL 求一组输入中的中值。
偶数个输入时,输出是中间二数的平均值。
NUMBITS 计算一组布尔量中逻辑“真”的个数SIN 正弦函数(单位:弧度)ASIN 反正弦函数COS 余弦函数ACOS 反余弦函数TAN 正切函数ATAN 反正切函数2.3 数据转换类:这类功能的作用是将一种变量的类型转换成另一种变量。
科台斯 KS97-F1 4G 全网通嵌入式模块使用手册说明书

KS97-F1 (4G)KytenceELECTRONICKS97智能模块系列 —GPRS/CDMA/3G/4GMake Data Wireless上海科台斯电子科技有限公司目录1. 功能简介 (5)2. 产品外观图 (6)3. 技术规格 (8)4. 应用说明 (9)4.1 参数配置 (9)4.2 短信(命令)/数据混合模式 (9)4.3 网络完全透传模式 (10)4.4 上行数据自动附加设备ID (10)4.5 查询无线信号强度 (10)4.6 查询IMEI (10)4.7 基站定位功能 (10)4.8 短信查询调试信息 (11)4.9 短信透传模式 (11)4.10多中心模式/多备份模式 (11)4.11双串口应用模式 (11)4.12网络校时功能* (12)4.13查询数据流量* (12)4.14加密通信 (12)4.15服务器工作模式* (12)4.16型应用电路1(单串口/双串口) (13)4.17典型应用电路2(RS485控制) (13)4.18电源电路参考1(简易5V供电) (14)4.19电源电路参考2(5-40V输入范围 DC/DC供电) (14)4.20电源电路参考3(5-12V输入范围线性稳压供电) (14)4.21外置SIM卡电路 (15)5. 安装/运行 (16)5.1 KS97 EVB介绍 (16)5.2 天线及 SIM(UIM)卡安装 (16)5.3 用户数据接口和电源电缆安装 (16)5.4 配件 (17)5.5 配置设备参数 (17)5.6 设备上电运行 (17)5.7 联网故障分析 (17)6. 产品参数配置 (19)6.1 准备 (19)6.2 软件界面说明 (20)6.2.1 界面概述 (20)6.2.2 设备串口参数配置 (20)6.2.3 网络参数设置 (21)6.2.4 传输参数设置 (22)6.2.5 多中心传输模式设置 (23)6.2.6 号码授权/密码授权设置 (23)6.3 保存 (24)6.4 批量配置模式 (24)6.5 短信命令生成工具 (24)6.6 短信配置参数/收发数据 (25)6.7 服务器远程配置参数 (25)7. 功能测试举例 (26)7.1 产品测试过程举例(无协议透传模式) (26)7.1.1 准备工作: (26)7.1.2 配置设备参数: (26)7.1.3 打开<网络调试助手.exe> 和 <串口调试助手.exe> (27)7.1.4 重新上电,等待设备连接服务器 (27)7.2 短信功能的测试 (29)7.2.1 设备向手机发送短信 (29)7.2.2 手机向设备发短信 (29)附录1:诊断信息说明 (31)附录2:路由器中IP的设置 (33)附录3: MIX版本(默认版本)使用说明 (35)1.MIX混合版本定义 (35)2.数据/命令的区分 (35)3.配置命令列表 (35)4.短信命令 (35)4.1 短信发送命令 (35)4.2 AT+SMS命令应答控制 (37)4.3 仅做短信模块使用 (37)附录4:AT+DNS说明及设置方法 (38)附录5:常见问题 (39)1.功能简介KS97-F1 4G全网通嵌入式模组针对仪器仪表/自动化产品而设计,采用插针式结构,使得用户产品无需更改软件,即可在最短时间内获得高效稳定的全制式兼容的蜂窝网络数据通信功能或短信通信功能。
迈安迪蒂 ESM-P 快速启动手册说明书

BT-ESM-P快速启动手册BEACON GLOBAL TECHNOLOGY目录模块简介: (2)模块初始配置 (3)配置模块做EtherNet/IP Server (5)配置模块做EtherNet/IP Client (11)配置模块做Modbus TCP server (18)配置模块做 Modbus TCP Client (22)配置模块做Siemens S7以太网主站 (27)举例1.罗克韦尔1756PLC和西门子PLC 315-2DP/PN通讯 (36)举例2.罗克韦尔1756PLC和西门子PLC 315-2DP/PN通讯 (40)举例3.Modbus TCP设备和罗克韦尔PLC 交换数据 (42)举例4.Modbus TCP设备和罗克韦尔PLC 交换数据 (45)举例5.Modbus TCP和西门子PLC交换数据 (47)举例6.西门子PLC读取2个Modbus TCP仪表数据。
(52)附录1.模块支持读写西门子PLC的数据类型 (56)附录2.模块支持读写西门子PLC的数据范围 (60)联系我们 (65)模块简介:BT-ESM-P系列网关是EtherNet/IP、Modbus TCP、Siemens S7以太网相互通讯的网关模块,支持在EtherNet/I、Modbus TCP和Siemens S7 Ethernet网络设备之间的双向数据交换,最大10000个16位字数据交换区。
◆EtherNet/IP协议可支持通讯的典型设备主要有罗克韦尔1756系列、1769系列、1746系列、PLC-2系列、PLC-5系列、SLC500系列、Micrologix 系列PLC。
以及PowerFlex系列变频器,E300智能马达保护器,PowerMonitor智能电力监控仪,上位机RSView SE软件等。
◆S7以太网协议可支持通讯的典型设备为各类西门子PLC,包括S7-200,S7-300,S7-400,S7-1200,S7-1500,◆Modbus TCP协议可支持通讯的设备包括各种PLC, DCS, 上位机软件,数显仪表,传感器等。
H-附录1-13
附录H-应力腐蚀裂纹技术模块H.1 范围这一模块是由于工艺设备存在易导致应力腐蚀裂纹(SCC)的破坏机理而建立的一个技术模块子参数(失效修正的可能性)。
腐蚀裂纹、胺致裂纹、硫致裂纹(SSC)、氢致裂纹(HIC)、应力引起的氢致裂纹(SOHIC)、碳酸盐裂纹、连多硫酸裂纹(SOHIC)和氯致应力腐蚀裂纹(CISCC)都在模块范围内。
模块里引用了技术附录以对导致应力腐蚀裂纹(SCC)的特殊破坏机理进行敏感性评估。
专家意见也可应用到建立应力腐蚀裂纹的敏感性中。
H.2 技术模块筛选问题筛选问题不能绕过应力腐蚀裂纹技术模块,所有设备必须经过此技术模块。
H.2.1 所需数据表H-1所列基本数据是确定应力腐蚀裂纹技术模块子参数所需的最低要求。
H.2.2 附加数据附加数据用来回答表H-2所列SCC筛选问题。
每一种SCC机理所需的更多数据在每一附录开头旁列出。
H.3 基本假设技术模块假定由模块的可执行方面决定每一种SCC机理的敏感性。
敏感性根据过程,材料,制造参数分为高、中低三级。
导致设备/管线裂纹(原始裂纹的可能性)的敏感性产物和导致开裂的裂纹的可能性。
还可以用一种很简单的方法处理已知裂纹。
设备/管线中特殊裂纹或裂纹组引起的失效可能性应该用更先进的方法和恰当的方式进行进一步评估H.4 技术模块子参数(TMSF)的确定图H-1A和H-1B介绍了用来确定技术模块子参数各个步骤的流程图,这些步骤与所需表格将在下面被讨论。
H.4.1 技术附录的筛选问题表H-2所列筛选问题可用来选择合适的SCC机理H.4.2 每种潜在SCC机理敏感性的确定每种SCC机理的独立部分要建立设备可能存在的敏感性H.4.2.1 现有裂纹的调节如果在设备中已检测到SCC,则认为敏感度很高。
如果检测到的SCC机理是已知的,那么此种机理的敏感度应增长到高级。
如果检测到的SCC机理是未知的,那么所有潜在机理裂纹的敏感度应该增长到高级。
H.4.3 严重指标的确定利用每种SCC机理的敏感性进入H-3并决定每种潜在/现存的SCC机理的严重指标。
IA系统培训资料 第一部分
目录目 录1.典型机柜布置图 (1)1.1 网络柜布置图 (1)1.2 DCS机柜布置图 (2)1.3 继电器机柜布置图 (3)1.4 安全栅机柜布置图 (4)1.5 电源机柜布置图 (5)1.6 置端子机柜布图 (6)2.系统安装步骤 (7)2.1 8.0 switch 设定 (7)2.2 I/A系统安装步骤 (11)2.3 IA8.0历史安装配置以及报表安装 (22)2.4 OPC的安装 (34)3.附录 (36)3.1 附录一:卡件技术参数及接线图1. FBM216 (36)2. FBM207 (37)3. FBM218 (39)4. FBM242 (40)5. FBM231 (41)6. FBM214 (43)7. FBM202 (44)8. FBM203 (45)9. FBM206 (47)10. FBM211 (48)11. FBM217 (49)12. FBM201 (50)3.2 附录二:软件部分第一章 I/A Series 系统概述1. I/A Series 智能自动化系列是开放式的DCS 系统…………………1-12. I/A Series 智能自动化系列的特点………………………………1-23. I/A Series 的网络结构……………………………….…………1-34. I/A Series 智能自动化系列的节点……………………………… 1-75. Mesh网……………………………….……………………… 1-86. I/A Series 智能自动化系列的硬件………………………………1-127. I/A Series软件结构……………………………….…………… 1-188. 如何设计一套 I/A 系统……………………………….…………1-23第二章操作系统1. UNIX 操作系统简介……………………………….……………2-12. 文本编辑程序……………………………….………………… 2-103. 文件管理程序……………………………….………………….2-104第三章控制组态1. 组合模块(Compound)和模块(Block)的概念…………………3-12. 组合模块(Compound)和模块(Block)的功能…………………3-23. ICC 组态器的使用………………………………………………3-94. Compound/Block 参数………………………………………….. 3-155. 几个常用模块介绍…………………………………………….. 3-196. 梯形逻辑控制模块…………………………………………….. 3-327. 顺序控制模块…………………………………………….……. 3-398. CALC 模块…………………………………………….…….. 3-58目录第四章显示与报警1. 操作界面…………………………………………….……...….4-12. 面板的显示与操作……………………………………………...4-23. 报警显示…………………………………………….……...…4-94. ScratchPad …………………………………………….………. 4-11第五章 FOXDRAW1. FoxDraw 菜单介绍……………………………………………….5-12. 流程图建立…………………………………………….……….5-43. 流程图组态…………………………………………….……….5-74. 组显示组态…………………………………………….……… 5-185. 报警组态…………………………………………….………… 5-19第六章历史记录与过程报表1. AIM*Historian 的功能…………………………………………...6-12. AIM*Historian Instance …………………………………………...6-23. 使用AIM*Historian管理器(histmgr)……………………………. 6-114. 浓缩组态……………………………………………………….. 6-155. AIM*Historian归档………………………………………………6-216. 生产报表………………………………………………………..6-277. 组态报表……………………………………………………… 6-338. 运行报表………………………………………………………. 6-42 9.报表目录结构和文件…………………………………………... 6-51 10.Web报表………………………………………………………6-51 11.自动清除旧报表……………………………………………… 6-53 12.故障解决……………………………………………………... 6-54 13.瞬时值报表…………………………………………………… 6-55第七章环境组态1. 50 系列环境组态………………………………………………..7-12. FoxView 环境组态………………………………………………7-23. 操作员行为记录……………………………………………….. 7-5第八章系统维护1. 机房条件……………………………………………………… 8-12. 系统硬件安装及上电 …………………………………………. 8-13. 系统管理软件概要 …………………………………………….. 8-64. 日常维护 ………………………………………………………8-11 5.软件备份 ………………………………………………………8-146. 用备份恢复硬盘系统 …………………………………………... 8-147.系统软件重装(DAY0重装)………………………………………8-14附录1:其它模块与参数附录2: IACC机柜布置图12机柜布置图34机柜布置图56交换机设置步骤交换机设置步骤选择I/A的版本,并点击select此页面填写AW的IP地址交换机的IP地址和类型,正确填写完毕后点击create configuration file保存后出现下面选项,保存文件交换机设置步骤全部保存后点击Invensys DefaultConfiguration Tool下装组态Factory Default Config “A-series”再选择:Config Stacking ports as Uplink ports “A-Series”再下装刚才组态的文件I/A Series System Version 8.4.2安装步骤I/A Series System Version 8.4.2安装步骤:1.使用DELL P92系统恢复盘,按下列步骤恢复系统:1)插入2号盘(symantec backup 8.0 Disk 2of 2)。
12232液晶资料

Tr Tddr
V ih i V ili
Tdsw
Th
V a lid D a ta
Tc
MPU 写数据 MPU 读数据
V ih i V ili
串口读写时序:
7
林洋电子
七、软件初始化:
电源开启
延迟时间超过 40ms
RS RW D7 D6 D5 D4 D3 D2 D1 D0 0 0 0 0 1 1 X X XX
2
林洋电子
二、外形尺寸图
图1
2. 外形尺寸图
表1
项目 模块体积 视域 行列点阵数 点距离 点大小
正常尺寸 84×44×13 60.5×18.0 122×32 0.36×0.41 0.40×0.45
三.模块主要硬件构成说明
单位 mm mm DOTS mm mm
控制器接口信号说明:
结果 配合/W 进行写数据或指令 配合 R 进行读数据或指令
3
林洋电子
低/低——>高
无动作
● 忙标志:BF BF 标志提供内部工作情况.BF=1 表示模块在进行内部操作,此时模块不接受外部指令和数
据.BF=0 时,模块为准备状态,随时可接受外部指令和数据. 利用 STATUS RD 指令,可以将 BF 读到 DB7 总线,从而检验模块之工作状态.
林洋电子
9
DB2
10
DB3
11
DB4
12
DB5
13
DB6
14
DB7
15
BL+
16
BL-
H/L 数据线 H/L 数据线 H/L 数据线 H/L 数据线 H/L 数据线 H/L 数据线 VDD 背光源电压+4.2V-+5V Vss 背光源公共端
赋安JB-SXB-FX01总线式火灾显示盘说明书
JB-SXB-FX01主机名称:火灾显示盘主机型号:FX01附录2 装箱清单此装箱单所列内容是指包装箱内应包括的设备和资料,不包括您选用的其它配件。
附录1 设备代码表第一章 显示盘简介 ‥‥‥‥‥‥‥1.1 概述 ‥‥‥‥‥‥‥‥‥‥‥1.2 主要特性 ‥‥‥‥‥‥‥‥‥1.3 主要技术参数 ‥‥‥‥‥‥‥第二章 显示盘安装 ‥‥‥‥‥‥‥第三章 操作指南 ‥‥‥‥‥‥‥3.1 开机运行 ‥‥‥‥‥‥‥‥‥3.2 功能操作说明 ‥‥‥‥‥‥‥第四章 接线说明及简单故障处理 ‥4.1 外部线路要求 ‥‥‥‥‥‥‥4.2 接线端子说明 ‥‥‥‥‥‥‥4.3 简单故障处理 ‥‥‥‥‥‥‥目 录3344577813131314附录 ‥‥‥‥‥‥‥‥‥‥‥‥‥附录 1 设备代码表 ‥‥‥‥‥‥‥‥附录 2 装箱清单 ‥‥‥‥‥‥‥‥151515JB-SXB-FX01火灾显示盘是一款智能型总线式中文界面显示的火灾显示盘。
本火灾显示盘满足国家标准GB17429-1998《火灾显示盘通用技术条件》的相关要求。
本产品的设计、制造、检验、销售及服务全过程,均符合ISO9000(2000版)质量管理体系的要求,并通过国际权威机构BSI的认证及中国国家消防电子产品质量监督检验中心检验。
4.3.1 液晶不清晰液晶不清晰时可以调主板上的可调电位器。
4.3.2 无显示显示盘液晶和指示灯没显示,可检查供电是否正常、所有接插件是否接插良。
4.3.3 声响故障显示盘在报火警情况下,没有火警报警声,可检查扬声器接线是否断线或插头接插不良。
4.3.4 时钟不准确时钟若显示不正确,通过菜单调时即可。
4.3.5 用户不能排除的故障请致电本公司的技术人员。
JB-SXB-FX01火灾显示盘是一种可用于楼层或独立防火区内的火灾报警显示装置。
火灾显示盘只能接收火灾报警控制器发出的信号,不能给火灾探测器、手动报警按钮及其他探测部件供电。
当建筑物内发生火灾后,消防控制中心的控制器接收报警信息,同时把报警信号传输到失火区域的火灾显示盘上,火灾显示盘将显示报警的设备的位置编码及相关信息,并发出声响信号,通知失火区域的人员。
新华DCS软件XDPS用户手册附录1--XDPS预定义标准功能块说明组态
一概述⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-1 二DPU简介⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-1 三DPU组态过程⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-2 四页⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-2 五功能块⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-2 1 XDPS实时网和硬件I/O功能块1.1 模拟量下网功能块 XNETAI ID=100⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-51.2 开关量下网功能块 XNETDI ID=101⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-51.3 模拟量上网功能块 XNETAO ID=102⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-51.4 开关量上网功能块 XNETDO ID=103⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-61.5 模拟量输入功能块 XAI ID=104⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-71.6 开关量输入功能块 XDI ID=105⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-81.7 模拟量输出功能块 XAO ID=106⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-81.8 开关量输出功能块 XDO ID=107⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-91.9 脉冲量输入功能块 XPI ID=108⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-91.10 页间模拟量输入功能块 PgAI ID=110⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-91.11 页间开关量输入功能块 PgDI ID=111⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-101.12 页间模拟量输出功能块 PgAO ID=112⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-101.13 页间开关量输处功能块 PgDO ID=113⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-102 模拟函数2.1 2输入加法器 ADD ID=1⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-112.2 乘法器 MUL ID=2⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-112.3 除法器 DIV ID=3⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-112.4 开方器 SQRT ID=4⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-122.5 取绝对值 ABS ID=5⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-122.6 五次多项式 POLYNOM ID=6⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-122.7 8输入数学统计器 SUM8 ID=7⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-132.8 12段函数变换F(X) ID=8⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-132.9 保留ID=9⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-142.10 指数/对数函数POW/LOG ID=10⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-142.11 三角和反三角函数 TRIANGLE ID=11⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-142.12、热力性质计算 PTCAl ID=12⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-153 时间过程函数3.1 超前滞后模块 LEADLAG ID=20⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-163.2 滞后模块 DELAY ID=21⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-163.3 微分模块 DIFF ID=22⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-173.4 时域统计模块 TSUM ID=23⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-173.5 数字滤波 FILTER ID=24⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-183.6 斜坡信号发生器ID=25⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-183.7 段信号发生器f(t) ID=26⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-183.8 伪随机信号发生器 Undefined ID=27⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-193.9 时域开关量统计模块 TSUMD ID=28⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-194 控制用算法4.1 二选一选择器 TWOSEL ID=30⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-204.2 三选一选择器 THREESEL ID=31⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-204.3 无扰切换模块 SFT ID=32⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-214.4 高低限幅器 HLLMT ID=33⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-214.5 高低限报警 HLALM ID=34⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-214.6 速率限制器 RATLMT ID=35⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-224.7 速率报警器 RATALM ID=36⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-224.8 偏差运算 DEV ID=37⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-234.9 PID运算 EPID ID=38⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-244.10 简单PID模块 Undefined ID=39⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-244.11 2输出平衡模块 Balance2 ID=40⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-254.12 八输入平衡模块 BALANCE8 ID=41⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-264.13 数字驱动伺服模块 DDS ID=42⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-264.14 查表式模糊控制器 FTAB ID=43⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-274.15 慢信号保护模块 SAIPro ID=44⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-285 逻辑电路5.1 2输入与 AND ID=50⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-295.2 2输入或 OR ID=51⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-295.3 反相器 NOT ID=52⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-295.4 异或器 XOR ID=53⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-305.5 8输入数量或 QOR8 ID=54⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-305.6 RS触发器ID=55⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-305.7 定时器 TIMER ID=56⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-315.8 计数器 CNT ID=57⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-325.9 模拟比较器 CMP ID=58⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-335.10 循环定时器 CYCTIMER ID=59⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-335.11 步序控制器 STEP ID=60⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-345.12 软件脉冲列输出 SPO ID=61⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-356 操作器6.1 模拟软手操器 S/MA ID=70⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-366.2 键盘模拟量增减 KBML ID=71⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-376.3 数字手操器 DEVICE ID=72⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-376.4 简单数字手操器 D/MA ID=73⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-416.5 带开关输出的模拟软手操器ADS/MA ID=74⋯⋯⋯⋯⋯⋯⋯⋯1-416.6 电气数字手操器 EDEVICE ID=75⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-427 特殊功能块7.1 品质(状态)测试模块ID=80⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-447.2 触发执行事件 EVENT ID=81⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-447.3 16个布尔变量转换为长整形变量 B16TOL ID=82⋯⋯⋯⋯⋯⋯⋯⋯1-457.4 长整形变量转换为16位布尔个变量ID=83⋯⋯⋯⋯⋯⋯⋯⋯1-45 LTOB167.5 长整型模拟变量含义转换器 LTOF ID=84⋯⋯⋯⋯⋯⋯⋯⋯1-457.6 节点(状态)测试模块 TDPU ID=85⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-467.7 上网报警闭锁功能块 DisAlm ID=86⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-467.8 上网报警限修改功能块 ChgAlm ID=87⋯⋯⋯⋯⋯⋯⋯⋯1-467.9 I/O卡件测试模块 TCard ID=88⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-477.10 I/O站测试模块 TNode ID=89⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1-47附录一 XDPS预定义标准功能块说明99.8.23一、概述XDPS的软件功能分DPU和MMI,MMI又包括OPU、ENG、HSU等,DPU又有VDPU、专用GTW 等。
年全国职业院校技能大赛:网络系统管理项目样题1

2022年全国职业院校技能大赛网络系统管理赛项模块A:网络构建(样题D♦ChinaSkiIIs网络系统管理赛项-模块A:网络2/15 构建任务描述Cn集团公司业务不断发展壮大,为适应IT行业技术飞速发屣,满足公司业务发展需要,集团公司决定建设广州总部与福州分部的信息化网络。
你做为火星公司网络工程师前往CII集团完成网络规划与建设任务.任务清单(一)基础配置1.根据附录1、附录2,配宜设符接口信息。
2.所有交换机和无线控制器开启SSH服务,用户名密码分别为admin、admin1.234:密码为明文类型,特权密码为admin。
3.交换机配置SVIP功能,向主机172.16.0.254发送TraP消息版本采用V2C,读写的Community为"Test",只读的Cooununity为"pub1.ic”,开启Trap消息。
(二)有线网络配置1.在全网TrUnk链路上做V1.AN修剪。
2.为隔离部分终湍用户间的二所互访,在交换机S5的Gi0∕1.-0i0∕10端口启用端口保护。
3.为规避网络末端接入设备上出现环路影响全网,要求在总部接入设备S1.进行防环处理。
具体要求如卜丁终端接口开启BPDU防护不能接收BPDu报文:终端接口下开启RU)P防止环路,检测到环路后处理方式为Shutdown-Port;连接PC终端的所仃端口配置为边缘端口:如果端口被BPDUGUard检测进入ErDisab1.cd状态,再过300秒后会自动恢豆(基于接口部署策略》,亚新检测是否有环路。
4.在交换机S3、S4上配置DHCP中继,对V1.AN1.O内的用户进行中继,使得总部PC1.用户使用DHCPRe1.ay方式获取IP地址。
5.DHCP服务器搭建于EG1.上,地址池命名为POO1.V1.AN10,DHCP对外服务使用100pback0地址。
6.为了防御动态环境局域网伪DHCP服务欺骗,在S1.交换机部署DUCPSnooping功能。
附录1 800-MODBUS通讯协议(107-122)

以下,读命令帧和返回帧举例,所有数据均为十六进制。
询问帧:01 03 06 00 00 03 78 44 (各字节含义详细说明) 01: 从机地址 03:读命令 06 00:读参数内存地址,高字节在前 00 03:读参数的个数 78 44:{01 03 06 00 00 03}的 CRC 校验和,具体为多少 需要校验函数计算。
¾ 数据:
改写参数的新值。
¾ 校验和:
从“从机地址” 到校验和前一字节,这一字符串的 LRC 校验和。
114
Modbus 通讯协议
回应帧
回应帧格式
帧 起 始 符 号
从 机 地 址
从 机 地 址
命 令 码
命 令 码
寄 存 器 地 址
寄 存 器 地 址
寄 存 器 地 址
寄 存 器 地 址
数 据
数 据
数 据
Modbus 协议并无主机地址。 ¾ 命令码:
从变频器读参数或数据的命令,这里值为:’0’’3’。 ¾ 数据字节:
一帧要读取参数的个数。为 4 字节。由十六进制转化为 ASC 模式而来 ¾ 数据串值:
返回的具体数据,数据串长度为寄存器地址“数据字节”,由十六进制转化为 ASC 模式而来。范围:4~40 字节 ¾ 校验和: 从“从机地址” 到校验和前一字节,这一字符串的 LRC 校验和。函数接口见文末。 ¾ 结束符: 回车,换行符。为:0x0D,0x0A 以下,读命令帧和返回帧举例,所有数据均为 ASCII 字符。 ¾ 询问帧:
(2)主机写从机单个寄存器,命令码: 06 主机帧
主机帧格式
从 机 地 址
命 令 码
寄 存 器 地 址
寄 存 器 地 址
数 据
数 据
LG K120S PLC使用手册(18)

附录1 系统定义附录 1 系统定义1) 选件说明(1) 选件连接可以设置通讯端口(COM1~4) 用来与PLC通讯。
∙在菜单中选择Project-Option-Connection Option。
∙初始画面中RS-232C已被设置为默认值。
∙Connection Option 详情, 请参考KGLWIN 使用说明。
(2) 编程器设置∙监视显示类型-选择需要的显示方式( 4 方式)。
∙源文件目录:- 你文件目录在KGLWIN中产生。
- 在来源目录中,KGLWIN 保存源程序参数等。
∙自动保存编制或修正用户程序时,自动保存用户程序的时间间隔的设置功能。
被保存用户程序的扩展名为‘ASV.’,保存在当前目录下。
这份扩展名为‘ASV.’的正在编制中的用户程序,关闭编程窗口时自动被删除。
这样,如果操作保存程序之前发生错误而无法保存已编制程序,可以通过定期自动保存起来的‘ASV.’,还能找回一部分程序。
具体设置方法如下。
∙设置自动保存时间间隔。
可在0 ~ 60分范围内设置任意值。
设定0时,自动保存功能将无效。
(3) 打印用纸设置使用此功能,可设置打印用纸的规格以及页边距。
2) 基本参数设置PLC运行中必需的基本参数,如内部保持区域、定时器分区线、跟踪监视看门狗定时时间(Scan Watchdog Time)、PLC工作模式、输入滤波时间常数、脉冲捕捉输入功能等。
(1) 内部保持区域在内部设备中,划定停电时保存数据的内部保持区域。
(2) 定时器分区线设置设置 100ms/10ms/1ms定时器分区线( 如果设置100ms和10ms t定时器,剩余部分自动被设置为 1ms 定时器区域 )。
(3) 跟踪监视看门狗设置为了跟踪监视用户程序的正常运行,用程序运行最大允许时间设置看门狗的定时复位时间常数(设置范围是10ms ~ 6000ms)。
(4) 输入设置设置输入滤波时间常数,或选择捕捉功能时使用此功能。
(5) 远程遥控允许PLC系统中除KGLWIN,可否使用FAM、通信模块进行远程遥控的使能参数。
附录1:ACS510_用户手册故障诊断及故障排除
ACS510 用户手册197故障诊断警告!不要试图进行本手册中没有涉及的任何测量、器件更换或其它维修工作。
否则将可能导致保修失效,危及正常运行,延长设备停机时间和增加费用等后果。
警告!本章中所介绍的所有电气安装和维护工作都必须由专业的电气工程师进行。
操作时必须遵守本手册最开始的安全指导。
诊断显示传动单元检测到异常事件,使用下列方式进行显示:•传动单元柜体上的绿色或红色LED 指示灯。
•控制盘上的 LED 指示灯( 如果装有控制盘)。
•控制盘显示屏( 如果装有控制盘)。
•故障字和报警字( 参数 0305 到 0309)。
故障字和报警字各位的定义,请参见69页的参数组03:FB 实际信号部分。
显示形式取决于事件的严重程度。
用户可以定义事件的严重程度,使传动根据事件的严重程度做出不同的反应:•忽略该事件信息。
•报告报警信息。
•报告故障信息。
红灯亮–故障传动监测到一个严重的问题或故障之后,可能会作出下列反应:•点亮传动单元上的红色LED 指示灯(LED 亮或闪烁)。
•控制盘上的红色LED指示灯亮( 如果变频器上装有控制盘)。
•在故障字参数(0305 到0307)里设置对应位。
•控制盘显示故障代码。
•电机停止( 如果正在运行)。
控制盘上的故障代码显示是暂时的,按下列任何一键可清除故障信息:MENU( 菜单)、 ENTER( 进入)、UP( 上) 或 DOWN( 下)。
如果故障依然存在,故障信息会在几秒钟后再次出现。
绿灯闪烁–报警不太严重的错误,称为报警,诊断显示是建议性的。
出现不太严重的错误时,传动单元通常用下列方式报告发现异常:•传动单元上绿LED 指示灯闪烁( 不适用于来自于控制盘操作错误引起的报警)。
•控制盘上的绿色LED 指示灯亮( 如果变频器上装有控制盘)。
198 ACS510 用户手册故障诊断•报警字参数(0308 或 0309) 的相应位。
关于报警字各位的定义,请参见70 页参数组03:FB 实际信号部分。
贴标机用户使用手册(全)
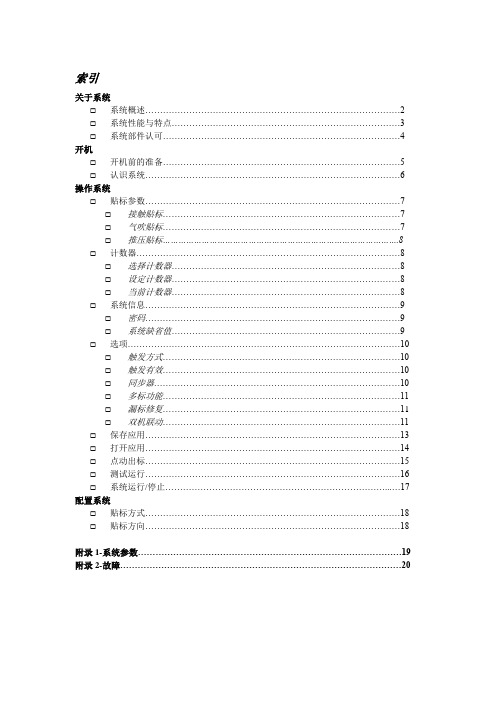
索引关于系统☐系统概述 (2)☐系统性能与特点 (3)☐系统部件认可 (4)开机☐开机前的准备 (5)☐认识系统 (6)操作系统☐贴标参数 (7)☐接触贴标 (7)☐气吹贴标 (7)☐推压贴标 (8)☐计数器 (8)☐选择计数器 (8)☐设定计数器 (8)☐当前计数器 (8)☐系统信息 (9)☐密码 (9)☐系统缺省值 (9)☐选项 (10)☐触发方式 (10)☐触发有效 (10)☐同步器 (10)☐多标功能 (11)☐漏标修复 (11)☐双机联动 (11)☐保存应用 (13)☐打开应用 (14)☐点动出标 (15)☐测试运行 (16)☐系统运行/停止 (17)配置系统☐贴标方式 (18)☐贴标方向 (18)附录1-系统参数 (19)附录2-故障 (20)系统概述欢迎使用本控制系统!本控制系统是专门为贴标行业设计。
专业友好的人机界面设计理念和模块化的集成控制,使系统的操作更为简捷,运行更为可靠。
系统性能与特点贴标参数---速度:0.3—60m/min停标精度:+/-0.4mm贴标方式---接触贴标气吹贴标推压贴标可选功能---传感器触发沿选择传感器有效使能,可防止物料和标签的多次触发同步器,可配生产线同步贴标(完全实时同步,当贴标动作过程中,如果生产线停止或变化,贴标动作也同时停止或变化。
不会造成贴标标签的皱折)多标功能。
不同与一般的多标功能,可实现一个物料可贴多张不同或相同的标签。
漏标修复。
标签底纸上没有标签时,系统会自动修复而不会造成物料的漏贴或重贴。
双机联动。
用户定义,可根据用户的要求组态成多台贴标机同时工作。
系统部件的认可CE ,UL操作界面防护等级IP65开机前的准备仔细检查系统电气及电源连接和机械的安全性警告:系统必须可靠接地。
认识系统开机,输入正确密码(8位)。
系统显示欢迎屏,之后进入操作主屏。
1-系统桌面。
触击桌面上的图标进入相关窗口进行相关操作。
2-状态栏。
显示当前的应用文件名称。
PSM20彩色触摸屏监控系统说明 - 嵌入式直流电源

PSM20彩色触摸屏监控系统说明一. 彩色触摸屏说明:1. 系统中的彩色触摸屏是一套以嵌入式低功耗CPU为核心(ARM9主频400MHz)的高性能嵌入式一体化工控机。
该产品设计采用了7英寸高亮度TFT 液晶显示屏(分辨率800×480),四线电阻式触摸屏(分辨率4096×4096),同时还预装了微软嵌入式实时多任务操作系统(中文版)和嵌入式组态软件(运行版)。
使得监控系统运行更加稳健可靠。
可外接USB鼠标键盘等。
2. 监控外形图片:7寸屏尺寸:面板尺寸226.5mm×163mm机柜开孔215mm×152mm面板尺寸274mm×193mm机柜开孔261mm×180mm3. 彩色触摸屏的详细参数请参见:附录2。
4. 串口引脚定义:(箭头指出的是15. 监控系统连接示意:单电单充系统:可以实现1组120节电池巡检,80路开关量检测,60支路绝缘检测,16个整流模块管理。
双电双充系统:参考上面的示意图,需要注意的是彩屏的COM2 (RS485)只接综合采样(1#和2#) 的J0 (RS485)端子;电池巡检盒、开关量、支路绝缘、整流模块或CAN485协议转换器的RS485按照各自所在的组别(如:I组、II组)分别接入对应的综合采样的JP3 (RS485),请千万注意不可将2个综合采样的J4(RS485)的485网络连接起来,而应是各自独立的。
可以实现2组每组120节电池巡检,2组每组80路开关量检测,2组每组60支路绝缘检测,2组每组16个整流模块管理。
二.彩色触摸屏监控菜单操作(如有更新,恕不另行通知)请注意:说明书的图片为截图,仅供示意,请以实物显示为准;2.1主界面(常态界面):单电单充系统主界面示意:双电双充系统主界面示意:此界面显示公司标识,交直流信息,充电模式,系统通讯状态和工作状态。
通过触摸屏点击“参数设置”按钮,进入“权限管理”的界面,输入正确密码才能进入相应的界面进行参数设置修改。
珠海瓦特_直流综合监控模块使用说明书
第一章 系统介绍 一、 系统概述
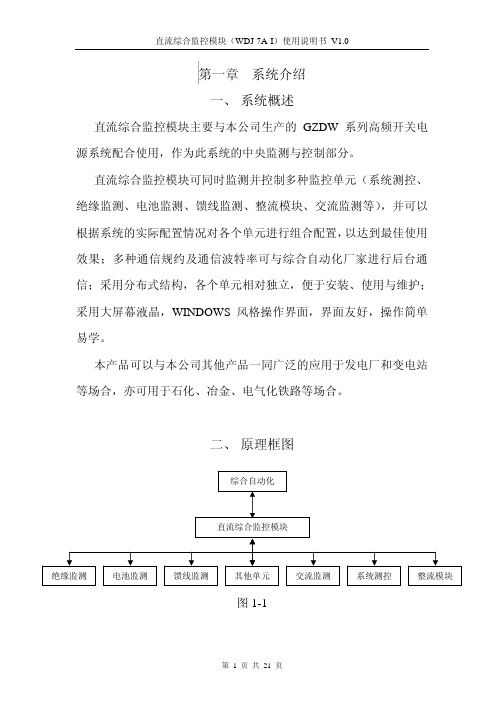
直流综合监控模块主要与本公司生产的 GZDW 系列高频开关电 源系统配合使用,作为此系统的中央监测与控制部分。
直流综合监控模块可同时监测并控制多种监控单元(系统测控、 绝缘监测、电池监测、馈线监测、整流模块、交流监测等),并可以 根据系统的实际配置情况对各个单元进行组合配置,以达到最佳使用 效果;多种通信规约及通信波特率可与综合自动化厂家进行后台通 信;采用分布式结构,各个单元相对独立,便于安装、使用与维护; 采用大屏幕液晶,WINDOWS 风格操作界面,界面友好,操作简单 易学。
进入该菜单内进行数据或参数的修改要先输入您的操作密 码,请牢记您的密码。
图 2-6
五、 系统功能
“系统功能”(如图 2-7 所示)包含 5 个子菜单: 单开关机:单模块开关机显示及设定 全开关机:模块全开关机显示及设定 查看告警:显示所有的告警及其信息 告警记录:记载每次告警的具体信息 其它功能:系统工作有关参数的设定 注: 进入该菜单内进行数据或参数的修改要先输入您的操作密 码,请牢记您的密码。
本产品可以与本公司其他产品一同广泛的应用于发电厂和变电站 等场合,亦可用于石化、冶金、电气化铁路等场合。
二、 原理框图
综合自动化 直流综合监控模块
绝缘监测
电池监测
馈线监测
其他单元
图 1-1
交流监测
系统测控
整流模块
第 1 页 共 21 页
直流综合监控模块(WDJ-7A-I)使用说明书 V1.0
三、 环境条件 1、 周围空气温度:45℃∽-5℃ 2、 最大相对湿度:≤95% 3、 海拔高度: ≤2000m 4、 地震裂度: 8 度
leadshine 交流伺服驱动器 L6E伺服系统功能手册说明书

交流伺服驱动器L6E伺服系统功能手册◆非常感谢您本次购买雷赛产品◆使用前请详细阅读此说明书,正确使用产品◆请妥善保管此说明书前言L6E系列伺服手册构成L6E系列伺服采用EtherCAT总线技术,为利于使用人员快速了解和使用L6E伺服产品及EtherCA T总线技术,L6E手册目前分2大部分,分别介绍L6E系列伺服、EtherCAT总线技术,介绍如下:A、《L6E伺服系统EtherCAT通讯功能手册》主要说明EtherCA T通讯原理及功能B、《L6E伺服系统功能手册》主要说明L6E伺服驱动器所包含的功能以及关联参数等详情手册适用对象●使用L6E伺服构建EtherCAT控制系统的开发工程师●为L6E伺服构建的设备提供支持服务的技术工程师L6E系列手册内容由浅入深,望用户可以层层阅读以便更快更好的使用L6E伺服驱动器;为利于使用人员从众多的伺服功能快速找到自己需要的功能,手册增加功能导引。
感谢您选用深圳市雷赛智能控制股份有限公司L6E系列交流伺服系统。
本手册提供了使用本系统所需知识及注意事项。
由于产品的改进,手册内容可能变更,恕不另行通知。
用户对产品的任何改动我司将不承担任何责任,产品的保修单将因此作废前言 ................................................................................................................................................ i i L6E系列伺服手册构成............................................................................................................. i i 手册适用对象............................................................................................................................. i i L6E系列伺服功能导引. (viii)第一章概述 (1)1.1 产品简介 (1)1.2 到货检查 (2)1.3 产品外观 (5)第二章安装 02.1储存和安装环境 02.2 伺服驱动器安装 02.2.1驱动器尺寸 (1)2.2.2安装方法 (2)2.3 伺服电机安装 (3)2.3.1 伺服电机尺寸 (3)2.3.2 安装方法 (6)第三章接口规格 (8)3.1 标准接线 (8)3.1.1配线 (8)3.1.2总线伺服配线图 (10)3.2 驱动器各端子说明 (11)3.2.1控制信号端子-CN1 (11)3.2.2编码器反馈信号端子-CN2 (12)3.2.3 EtherCAT通讯端子-CN3 (13)3.2.4 RS232通讯端子-CN4 (13)3.2.5 USB通讯端子-CN5 (14)3.2.6 主电源输入端子 (14)3.2.7 控制电源端子 (14)3.3 I/O接口原理及功能参数 (15)3.3.1 IO输入 (15)3.3.2 IO输出 (17)第四章显示与操作 (19)4.1面板显示和面板操作 (19)4.1.1概述 (19)4.1.2面板操作流程图 (20)4.1.3驱动器运行数据监视 (21)4.1.4 辅助功能 (24)4.1.5 参数保存 (26)4.1.6异常报警 (26)4.2运行前准备 (27)4.3 面板试运行 (27)4.4 总线运行须知 (28)4.4.1工作模式 (28)4.4.2 必要配置 (29)第五章功能使用 (30)5.1 位置控制 (30)5.1.1 旋转方向设定 (31)5.1.2 PP/CSP/HM指令输入处理 (31)5.1.3 软限位 (32)5.1.4 电子齿轮 (32)5.1.5指令位置滤波 (33)5.1.6 位置定位完成信号INP输出 (34)5.2 速度控制 (36)5.2.1 旋转方向设定 (36)5.2.2 PV/CSV指令输入处理 (37)5.2.3速度指令加减速功能 (37)5.2.4 速度到达信号A T-SPEED输出 (38)5.2.5 速度一致信号V-COIN输出 (39)5.2.6 零速钳位功能 (40)5.3 转矩控制 (41)5.3.1 旋转方向设定 (41)5.3.2 PT/CST指令输入处理 (42)5.3.3速度限制功能 (43)5.4 增益调整功能 (44)5.5 惯量识别功能 (50)5.6 陷波器功能 (52)5.7 前馈功能 (54)5.8 第三增益切换功能 (55)5.9 摩擦转矩补偿功能 (57)5.10 EtherCAT从站别名设定 (57)5.11 再生电阻设定 (57)5.12 安全功能 (59)5.12.1 电机最高转速限制功能 (59)5.12.2 外部制动器解除信号BRK-OFF输出功能 (59)5.12.3 伺服关闭时顺序 (60)5.12.4 转矩限制功能(TL-SEL) (60)5.12.5 报警后立即停止时间 (61)5.12.6 紧急停止功能 (61)5.13 其他功能 (62)5.13.1 零速度输出(ZSP) (62)5.13.2 位置偏差清零(CL) (62)5.13.3 位置指令禁止输入(INH) (62)5.13.4 位置单位选择 (63)5.13.5 到位信号延迟时间 (63)第六章时序图 (64)6.1 上电时序图 (64)6.2 故障时序图 (65)第七章报警与处理 (66)7.1 报警一览表 (66)7.1.1 伺服驱动报警 (66)7.1.2 EtherCAT通讯报警 (67)7.2 伺服驱动报警处理方法 (69)7.2.1 报警分析 (69)7.2.2 报警关联参数 (75)7.2.3 报警清除 (76)第八章产品规格 (78)8.1驱动器技术规格 (78)8.2 伺服电机规格 (79)8.3 应用建议 (79)附录1参数汇总表 (81)附录2原点方法 (84)L6E系列伺服功能导引第一章概述1.1 产品简介L6E系列交流伺服系统是深圳市雷赛智能控制股份有限公司自主研制的全数字总线式交流伺服系统,基于ETG COE + CANopen DSP402协议,可与支持此标准协议的控制器/驱动器无缝连接。
enc-1-1-t-24说明书

enc-1-1-t-24说明书摘要:一、说明书简介1.产品名称2.产品型号3.产品功能二、使用注意事项1.安装环境要求2.使用前的准备工作3.使用过程中的安全提示三、产品安装步骤1.准备工作2.安装步骤详述3.完成安装后的检查四、产品使用方法1.开关机操作2.功能模块介绍与操作3.常见问题处理五、产品维护与保养1.日常维护2.定期检查与保养3.故障排除与处理六、产品规格与参数1.产品尺寸与重量2.系统配置与性能3.输入输出接口规格七、附录1.产品配件列表2.技术支持联系方式3.相关软件与文档下载地址正文:【说明书简介】本说明书为enc-1-1-t-24产品的详细使用指南。
在此,我们将为您介绍产品的基本信息、使用注意事项、安装步骤、使用方法、维护保养、产品规格以及附录等相关内容。
请您在使用前仔细阅读本说明书,以确保正确、安全地使用本产品。
【使用注意事项】为了保证您的人身安全和产品的正常使用,请在使用前务必遵守以下注意事项:1.安装环境要求:请将产品安装在通风、干燥、无腐蚀性气体的环境中,避免阳光直射和雨淋。
2.使用前的准备工作:在开始安装和使用产品前,请确保您已阅读并理解本说明书的内容。
同时,请确保产品包装内所有配件齐全,无损坏。
3.使用过程中的安全提示:请勿将手指或其他物体插入产品的通风口和导电部分,以免造成触电或损坏设备。
使用过程中如遇异常情况,请立即断开电源,并联系售后服务人员处理。
【产品安装步骤】1.准备工作:检查产品包装内所有配件是否齐全,确保安装环境符合要求。
2.安装步骤详述:请按照本说明书中的安装步骤进行操作。
3.完成安装后的检查:安装完成后,请开机检查设备运行是否正常,如有异常请及时联系售后服务人员。
【产品使用方法】1.开关机操作:请按照说明书中的指引进行开关机操作。
2.功能模块介绍与操作:本产品具有多种功能模块,您可以根据需要进行选择和使用。
3.常见问题处理:如遇到使用过程中的问题,请参照本说明书中的故障排除与处理方法进行解决。
盾安FWRM风冷涡旋附录1-电气操作-
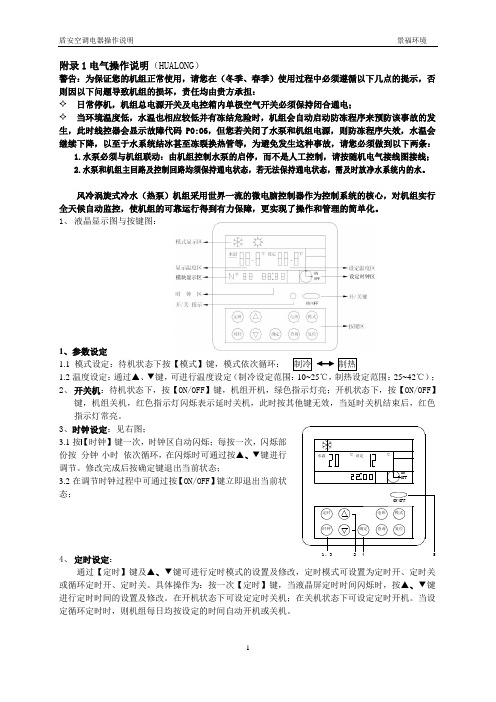
附录1电气操作说明(HUALONG )警告:为保证您的机组正常使用,请您在(冬季、春季)使用过程中必须遵循以下几点的提示,否则因以下问题导致机组的损坏,责任均由贵方承担:✧ 日常停机,机组总电源开关及电控箱内单极空气开关必须保持闭合通电;✧ 当环境温度低,水温也相应较低并有冻结危险时,机组会自动启动防冻程序来预防该事故的发 生,此时线控器会显示故障代码P0:06,但您若关闭了水泵和机组电源,则防冻程序失效,水温会继续下降,以至于水系统结冰甚至冻裂换热管等,为避免发生这种事故,请您必须做到以下两条:1.水泵必须与机组联动:由机组控制水泵的启停,而不是人工控制,请按随机电气接线图接线;2.水泵和机组主回路及控制回路均须保持通电状态,若无法保持通电状态,需及时放净水系统内的水。
风冷涡旋式冷水(热泵)机组采用世界一流的微电脑控制器作为控制系统的核心,对机组实行全天候自动监控,使机组的可靠运行得到有力保障,更实现了操作和管理的简单化。
1、 液晶显示图与按键图:1、参数设定1.1 模式设定:待机状态下按【模式】键,模式依次循环: 1.2温度设定:通过▲、▼键,2、 开关机:待机状态下,按【指示灯常亮。
3、时钟设定:见右图;3.1按【时钟】键一次,时钟区自动闪烁;每按一次,闪烁部份按 分钟-小时 依次循环,3.2在调节时钟过程中可通过按【态;4、 定时设定:通过【定时】键及▲、或循环定时开、定时关。
具体操作为:按一次【定时】键,当液晶屏定时时间闪烁时,按▲、▼键进行定时时间的设置及修改。
在开机状态下可设定定时关机;在关机状态下可设定定时开机。
当设定循环定时时,则机组每日均按设定的时间自动开机或关机。
若查询的是子模块SC1:TEP(温度)查询项,则只显示TEP03\TEP05\TEP06这三项参数,其余温度值不显示;7、【复位】键当机组在运行中出现故障时,液晶显示屏将呈现出故障信息。
排除故障后,按【复位】键可解除锁定。
遥感大气校正
遥感⼤⽓校正实验四遥感图像的⼤⽓校正实验⽬的:通过实习操作,掌握遥感图像⼤⽓校正的基本⽅法和步骤,掌握遥感图像波段计算及其应⽤。
实验内容:环境⼩卫星的数据读取;辐射定标、图像配准、⼤⽓校正;植被反演、植被覆盖变化监测1、实验相关知识及背景◆传感器定标就是将图像的数字量化值(DN)转化为辐射亮度值或者反射率或者表⾯温度等物理量的处理过程;传感器定标可分为绝对定标和相对定标,绝对定标是获取图像上⽬标物的绝对辐射值等物理量。
◆遥感图像的⼤⽓校正⽅法很多,这些校正⽅法按照校正后的结果可以分为2种:绝对⼤⽓校正⽅法:将遥感图像的DN(Digital Number)值转换为地表反射率、地表辐射率、地表温度等的⽅法。
相对⼤⽓校正⽅法:校正后得到的图像,相同的DN值表⽰相同的地物反射率,其结果不考虑地物的实际反射率。
◆ENVI下FLAASH⼤⽓校正⼯具是基于MODTRAN4+辐射传输模型,FLAASH对图像⽂件有以下⼏个要求:(1)数据是经过定标后的辐射亮度(辐射率)数据,单位是:(µW)/(cm2*nm*sr)。
(2)数据带有中⼼波长(wavelenth)值,如果是⾼光谱还必须有波段宽度(FWHM),这两个参数都可以通过编辑头⽂件信息输⼊(Edit Header)。
(3)数据类型⽀持四种数据类型:浮点型(floating)、长整型(long integer )、整型(integer)和⽆符号整型(unsigned int)。
数据存储类型:ENVI标准栅格格式⽂件,且是BIP或者BIL。
(4)波谱范围:400-2500nm◆浑善达克地区位于内蒙古草原锡林郭勒⾼原中部。
近年来频频发⽣在京津地区的沙尘暴与该地区⽣态环境恶化相关。
据统计,京津地区沙尘暴70%的沙源来⾃于这个区域。
通过对该区域植被覆盖度的定量反演,植被覆盖的变化检测,可以实现草原植被的⾼频率、⼤范围、⾼实时的变化监测。
2、实验步骤根据环境⼩卫星CCD数据特点及草原植被变化监测的要求,采⽤以下处理流程:⼀、数据预处理:/doc/dd3ded9f02d8ce2f0066f5335a8102d277a26100.html D数据读取;2.辐射定标;3.⼤⽓校正;4.研究区裁剪;⼆、反演模型建⽴1.归⼀化植被指数;2.植被覆盖度;三、植被变化监测1.植被覆盖区提取;2.植被变化检测;四、后期处理与应⽤◆数据读取和定标(1)安装环境⼩卫星数据读取和定标补丁ENVI_HJ1A1B_Tools.sav⽂件放在home\ITT\IDL\IDL80\products\envi48\save_add⽬录下。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
附录一因为大多数用户都希望我们能对所有模块的参数加以说明,为不影响教材的结构与特点,我们就以附录的形式对第三章的内容作一补充。
同样,我们只对模块的主要参数作解释。
在第三章中已经讲解过的模块和参数,这里就不再讲解,除非该同名参数在该模块中有特别的含义。
模块的功能在第三章中已作说明,这里也不再赘述。
BLNALM 开关/逻辑状态报警模块IN_i (i=1~8 下同) 8个开关/逻辑信号输入,定义输入信号来自哪一个模块的输出IVO_i invert option 输入信号转换选择,0=不转换/1=转换,将对应的输入信号作0变换为1,或1变换为0。
当输入为真时,被处理为报警。
当我们困惑于到底0为逻辑真,还是1为逻辑真时,可用此参数转换输入的状态。
NM0_i 当输入为0时的字符输出信息,最多12个字符。
NM1_i 当输入为1时的字符输出信息。
ANM_i alarm name 报警名,用于报警输出信息,最多12个字符。
SAO_i state alarm option 报警选择,置1 表示需要报警。
SAG_i state alarm group 报警设备组。
SAP_i state alarm priority 报警优先级。
CIN 开关量输入模块IOM_ID 和 PNT_NO 定义输入信号来自哪一块FBM的哪一通道。
ANM、 NM0、 NM1、 IVO、 SAO、 SAP、 SAG 这些参数与BLNALM模块的参数几乎完全一样,就差 _i。
CIN 该模块的输出参数。
COUT 开关量输出模块IOM_ID 和 PNT_NO 定义输出信号从哪一块FBM的哪一通道出去。
IN input 输入参数,定义输入信号的来源。
PLSOPT pulse option 脉冲选择, 0 表示模块按开关方式工作,即输出状态随输入状态改变; 1 表示模块按脉冲方式工作,即当输入状态由0变为1时,输出一个宽度由WIDTH所定义的脉冲。
WIDTH pulse width 脉冲宽度,脉宽的时间单位是分。
COUT 该模块的输出参数。
ANM、 NM0、 NM1、 IVO、这些参数与CIN模块的参数完全一致。
CHARC 非线性函数模块X_i 和 Y_i (i=1~21) 定义多段折线所对应的输入和输出的参数值。
STARTP starting point 起始点点号。
ENDP ending point 结束点点号。
根据实际应用情况,多段折线最多可达20段,但并不一定非要20段。
实际定义的多段折线可以从任意点开始,到任意点结束。
上述二参数用于定义折线的开始点和结束点。
输附录1-1入的参数值必须随X下标的增加而单调递增,即所定义的非线性函数必须是单值函数。
EXTOPT 扩展模块选择。
0 = 不做扩展模块; 1 = 标准的扩展; 2 = 热电耦信号转换扩展。
DGAP 二位间隙式控制模块本模块与PID 模块在控制模式上的不同,在输出上表现为, PID模块输出一个连续量信号,用来控制阀门这一类的设备; DGAP模块输出一个开关量信号,用来控制电机这一类的设备。
因此这二个模块的参数很多都是相同的。
MODOPT control mod option 控制模式选择,定义模块的工作方式,当设定为“2”时,表示模块处于二位二态工作方式;当设定为“3”时,表示模块处于二位三态工作方式。
GAP 间隙,定义一间隙的宽度,此间隙对称地跨在给定值SPT二边,这一区间为不灵敏区,只有当测量值越过了这段不灵敏区,模块的输出才会动作。
GAPDB gap deadband 间隙死区,在二位三态工作方式时,在间隙的上、下二侧边界之内各定义一个死区,当测量值在不灵敏区外时,某一个模块输出动作,但只有当测量值返回到不灵敏区,同时超过此死区时,该模块输出才会停止动作。
OUTDEC output decreaseOUTINC output increase 这二参数为模块的输出参数,意义相同,输出值相反。
图3a-1 DGAP 模块工作原理附录1-2模块组态为二位二态工作方式,并处于自动时,当测量值大于给定值并越出不灵敏区(GAP)时, OUTDEC值为“1”;当测量值小于给定值并越出不灵敏区时, OUTDEC值为“0”;当测量值从不灵敏区之外返回到区内时, OUTDEC 的输出值保持不变。
模块组态为二位三态工作方式,并处于自动时,当测量值大于给定值并越出不灵敏区时(GAP)时, OUTDEC值为“1”;而当测量值返回到不灵敏区之内,并超越死区(GAPDB)时, OUTDEC值才返回“0”。
GDEV 通用设备控制模块IOM_ID FBM 的通讯地址,如果用FBM作为本模块的输入、输出就必须填写,且输入与输出必须在同一块 FBM 上IP_FBM 本模块驱动的马达等设备开关是否到位信号的输入选择参数,本参数置 1 表示从FBM上取输入信号,在LMn_PT (n=1~2) 参数上填写输入通道的点号,这时A VLLM1与 A VLLM2 必须置1。
LM1_PT 设备关停到位的反馈输入的点号。
如果LM2_PT 设备开启到位的反馈输入的点号。
OP_FBM 模块的输出是否送到FBM上,本参数置 1 表示从FBM上送出,在COn_PT (n=1~2) 参数上填写输出通道的点号。
CO1_PT 在FBM上的触点输出通道号,连接被驱动的马达等设备,送出运行信号。
CO2_PT 在三线制时,触点输出在FBM上的通道号,连接被驱动的设备的停止信号。
如使用二线制设备,则不用CO2_PT输出。
A VLLM1、A VLLM2 是否使用设备开关到位信号,置 1 表示使用该信号。
如果IP_FBM也置1,这时 DEVLM1和DEVLIM2 反映了LM1_PT和LM2_PT输入的信号;如果IP_FBM 置0,可以用DEVLM1和DEVLIM2连接其它模块送来的开关到位信号。
TOC 开关该设备到位的行程时间,单位:分。
DSRTRK Desired State Request Track option 模块的手自动请求状态跟踪选择,置1表示要跟踪。
该参数一但置1,如再想置0,就必须对模块执行一次delete/undelete才有效。
AUTDSR Auto Desired State Request,这是一个可连接的布尔输入参数,在模块处于自动时发出开关动作,置1就送出开信号,置0 送出关信号。
在二线制时,COUT_1 输出跟随AUTDSR 的输入值。
在三线制时,AUTDSR 为1时就在COUT_1输出正向脉冲信号启动马达, AUTDSR 为0时就在COUT_2输出负向脉冲信号停止马达。
MANDSR Manual Desired State Request,本参数的作用基本上与AUTDSR相同,只是在模块手动时动作。
INTDSR Interlock Desired State Request,本参数的作用基本上与AUTDSR相同,只是在模块处于连锁状态 (INTLCK=1) 时动作。
二线制PLSOPT = 0时, INTDSR 的输入决定设备的状态;三线制PLSOPT = 1时, DSRIND 的输入决定设备的状态。
HLDDSR Hold Desired State Request,这是一个可连接的整形输入参数,在模块处于自动并保持(HOLE=1)时发出开关动作。
HLDDSR=0,发出关信号; HLDDSR=1,附录1-3附录1-4发出开信号; 其它值则保持原来的状态。
DSR_RB Desired State Request Readback , 请求状态的读回信号, 这是一个可连接的布尔输入参数, 连接一个请求状态的反馈信号, 用来防止虚假的不匹配报警。
如果不作连接, 模块把限位开关输入信号与所请求的状态比较,DSR_RB =1, 表示设备开;DSR_RB =0, 表示设备停。
HLD Hold , 保持是一个可连接的布尔输入参数。
在自动模式时, 该参数如置1, 模块的输出状态就由 HLDDSR 参数决定。
INTLCK Interlock , 互锁是可连接的布尔输入参数。
在自动、 手动和保持模式时, 本参数置1, 就将模块转入互锁模式。
在互锁模式, 如果脉冲选择PLSOPT =0, 则INTDSR 的输入决定输出的状态; 如果PLSOPT =1,DSRIND 决定输出的状态。
DISABL 废了是可连接的布尔输入参数, 为1时就将输出COUT 置关停, 并且禁止对模块的操作, 不管是处于手动还是自动。
本参数独立于手动, 且级别更高。
SDWNOP Shutdown Option 关机选择, 当模块进入DISABL 模式, 或组合块停止运行时本模块要采取的动作。
0 = 关/停1 = 开关量的输出保持不变/脉冲输出停止2 = 开/启IGNLMn (n=1~2) Ignore Limit Switch 忽略限位开关, 置1时就使DEVLMn 的不匹配报警不起作用。
DEVLM1 Device Limit Switch 1设备限位开关1, 可连接的布尔输入参数, 读入关停限位开关的信号。
该值为1时, 表示设备关停到位。
注意与A VLLMn 参数从关系。
DEVLM2 限位开关2, 基本意义同上, 为1时, 表示开启到位。
INVLMT invert limit option 限位信号是否作0/1转换, 置1表示要转换。
INVCOn (n=1~2) 输出信号作0/1转换选择, 置1表示要转换。
PLSOPT pulse option 输出脉冲选择, 模块用来控制二线制设备时应置0, 这时模块安输入上得到的开关请求在COUT_1上送出开关信号。
本参数置1用来输出脉冲信号控制一个三线制的设备, 请求开启就在COUT_1送出正向脉冲, 请求关闭就在COUT_2送出负向脉冲。
PLSTIM Pulse Time 脉冲宽度, 单位:秒, 该值不能小于模块的处理周期。
STATn (n=1~4)给用户输入设备的关、 开、 正在关和正在开4种状态的文本说明, 作为报警文本, 这些文本也出现在模块的面板上。
MMn (n=1~4) Mismatch 不匹配报警的文本。
MODEn (n=1~4) device operatingmode 模块的操作模式说明, 12位字符串。
当模块处于某一操作模式时可在面板上显示在此定义的字符串。
右边的表可作一样板。
输出参数ACTTOC Actual Time to Open/Run or Close/Stop 实际开关行程时间。
COUT_1 contact out 1 触点输出1,在二线制时,输出一个持续的开关量;三线制输出正向脉冲。
当OP_FBM=1,输出量同时在FBM上由CO1_PT的指定通道送出。