探测与识别技术
爆炸物探测与识别技术

爆炸物探测与识别技术[摘要] 综述了爆炸物探测与识别所采用的微量炸药探和块体炸药探测两大类技术, 讨论了每类技术所采用的探测方法及工作原理。
介绍了目前国外的探测设备, 根据每种探测技术和探测设备在使用中存在的不足,对其今后可能的发展趋势作了进一步探讨。
[关键词] 爆炸物探测与识别探测设备1 前言近年来, 恐怖爆炸事件频频发生在世界各地, 各种形式的炸药和爆炸装置被用于恐怖犯罪活动, 造成了大量的人员伤亡和财产损失。
为了把恐怖活动遏制在未遂状态, 人们把目光更多地投注在依靠物理、化学等科学技术手段对爆炸物的探测与识别上。
国外对这一领域进行了大量深入的研究, 在我国, 由于起步较晚, 与国外相比还很大差距。
因此, 有针对性地研究国外爆炸物探测与识别技术, 对于加快我国在这一领域的发展有着重要的现实意义。
2 爆炸物探测与识别的技术类型爆炸物探测与识别技术有很多种, 根据有关资料归纳统计[1] , 该技术主要分为两大类: 微量炸药探测和块体炸药探测, 大致如图1 所示。
图1 爆炸物探测的主要技术类型2. 1 微量炸药探测微量炸药探测是指对微量(肉眼很难看见) 的爆炸品残留物进行取样和分析的技术。
爆炸品在处理过程中总会留下气体或固体颗粒形式的残留物, 通过搜集这些残留物并使用相关的探测技术对其进行分析, 从而判断是否存在爆炸物。
常见的微量炸药探测技术有离子迁移光谱等电化学技术和激光拉曼光谱技术。
2. 2 块体炸药探测块体炸药探测是指探测可见数量的炸药。
通常包括X、C射线成像技术和基于核的技术。
X、C射线都是高能电磁波, 当它们遇到物质时, 会发生三种情况: 透射、被吸收、散射或反向散射。
根据这三种现象获得的信息, 可以探测出物质的密度、原子序数等特征量。
炸药的特征就是密度高、原子序数低。
当前X 射线成像技术包括: 单能X 射线技术、双能X 射线技术、CT 技术、反向散射技术和荧光透视技术。
炸药探测的核技术主要包括核四极矩共振技术和中子技术。
探测与识别技术
目标探测与识别技术调研报告摘要:目标检测与识别在军事上对于战场监视和侦察具有重要作用,是现代高科技战争中赢得战争胜利的关键因素之一。
目标检测与识别就是对目标及环境的探测、识别、跟踪、定位,提供目标的信息,探测技术包括微光夜视技术、热成像技术、激光技术、兵器雷达技术等目前各国对目标检测与识别的研究都十分重视,探测与识别技术在现代国防,工业,医学和空间等领域有着广泛的应用前景。
关键词:探测、识别、跟踪、定位、微光夜视技术、热成像技术、激光技术、兵器雷达技术。
引言:目标检测与识别在军事上对于战场监视和侦察具有重要作用,是现代高科技战争中赢得战争胜利的关键因素之一。
目标检测与识别就是对目标及环境的探测、识别、跟踪、定位,提供目标的信息,探测技术包括微光夜视技术、热成像技术、激光技术、兵器雷达技术等。
微光夜视技术在可见光和近红外波段范围内,将微弱的光照图像转变为人眼可见的图像,扩展人眼在低照度下的视觉能力。
微光夜视仪器可分为直接观察和间接观察两种类型。
直接观察的微光夜视仪,由物镜、像增强器、目镜和电源、机械部件等组成,人眼通过目镜观察像增强器荧光屏上的景物图像,已广泛用于夜间侦察、瞄准、驾驶等。
间接观察的微光电视,由物镜、微光摄像器件组成微光电视摄像机,通过无线或有线传输,在接收显示装置上获得景物的图像,可用于夜间侦察和火控系统等。
1934年,荷兰的霍尔斯特等人制成第一只近贴式红外变像管,树立起人类冲破夜暗的第一块里程碑。
随着夜视技术的不断进展,品种不断增多,目前主要有:主动式红外夜视仪、微光夜视仪和热成像仪三种。
其中微光夜视仪与主动红外夜视仪相比,有着体积小、重量轻,而且由于工作方式是被动的,使用起来安全可靠,不易暴露的优点;和热成像仪相比虽然在性能上稍逊一筹,但其极高的性价比使其逐渐成为各国军队的主战夜视装备。
主动式红外夜视仪是夜视器材的鼻祖,它的出现使人类第一次看到黑暗中的目标。
像增强器研制成功,使得夜视器材的发展产生了一个新飞跃。
空间目标探测与识别方法研究
空间目标探测与识别方法研究一、概述空间目标探测与识别作为航天领域的重要研究方向,旨在实现对地球轨道上各类空间目标的精确探测和有效识别。
随着航天技术的不断发展,空间目标数量日益增多,类型也日趋复杂,这给空间目标探测与识别带来了前所未有的挑战。
深入研究空间目标探测与识别方法,对于提升我国航天事业的国际竞争力、维护国家空间安全具有重要意义。
空间目标探测主要依赖于各类传感器和探测设备,如雷达、光电望远镜、红外传感器等。
这些设备能够捕获空间目标的信号或特征信息,为后续的目标识别提供数据支持。
由于空间环境的复杂性和目标特性的多样性,探测过程中往往伴随着大量的噪声和干扰,这要求我们必须采用先进的信号处理技术来提取有用的目标信息。
空间目标识别则是基于探测到的目标信息,利用模式识别、机器学习等方法对目标进行分类和识别。
识别的准确性直接影响到后续的空间态势感知、目标跟踪以及空间任务规划等工作的质量。
如何提高识别算法的准确性和鲁棒性,是当前空间目标识别领域的研究重点。
本文将对空间目标探测与识别方法进行深入研究,包括探测设备的选择与优化、信号处理技术的研究与应用、以及识别算法的设计与实现等方面。
通过对这些关键技术的探讨,旨在为提升我国空间目标探测与识别的能力提供理论支持和技术保障。
1. 空间目标探测与识别的背景与意义随着科技的飞速发展和人类对宇宙探索的深入,空间目标探测与识别技术逐渐成为当今科研领域的热点。
空间目标包括各类卫星、太空碎片、深空探测器以及潜在的太空威胁等,它们的存在与活动对人类的航天活动、地球安全以及宇宙资源的开发利用具有重要影响。
在空间目标探测与识别领域,通过高精度、高可靠性的技术手段对空间目标进行实时、准确的监测与识别,对于保障航天器的安全运行、预防太空碰撞、维护国家安全和促进航天事业的发展具有重要意义。
对于深空探测和宇宙资源的开发利用,空间目标探测与识别技术也提供了有力的技术支撑。
随着太空竞争的加剧,空间目标探测与识别技术也成为各国军事竞争的重要领域。
探测与识别 技术总结哦!!!

第一章绪论1.目标探测与识别:对固定或移动目标的非接触测量,测量的信号中包含距离、位置、方位角或高度信息等,这种测量的装置可以使固定,也可以是运动的,而测量到的信号经过特殊的识别方法能正确地给出相关的信息。
2.高新技术弹药:在弹药上采用了末端敏感技术、末端制导技术、弹道修正技术等,此类弹药都具有一定的目标探测功能。
3.“三打”:打武装直升机、打巡航导弹、打隐形机。
4.“三防”:防侦查、防电子干扰、防精确打击。
5.智能导弹工作原理:智能雷弹由声传感器探测1000m左右直升机螺旋桨产生的噪声,一旦分析出这种信号,雷弹锁定其频率,当信号或噪声增加到一定水平时,第二个探测系统开始工作,它能探测到直升机的接近距离或敏感到直升机主螺旋桨下降气流产生的大气压力变化,一旦达到预定的距离或压力变化时,雷弹可被弹射到一定的高度爆炸,毁伤直升机。
6.水下反鱼雷三种三种方式:声纳、磁探测技术、两者的复合技术。
7.灵巧化的精确制导的两项关键的核心技术:1)高分辨率、高灵敏度的毫米波或红外探测敏感技术;2)智能化信息技术处理与识别技术。
第二章目标特性1.坦克的主要特性与特征:红外辐射特征、声传播特征、行驶过程中产生的地面震动特征。
2.大气窗口:在某些波长范围内,其辐射能较好地通过,几乎一切与大气有关的光学设备都只能去适应这些窗口。
3.喷气式飞机的4种红外辐射源:作为发动机燃烧室的热金属空腔、排出的热燃气、飞机壳体表面的自身辐射、飞机表面反射的环境辐射。
4.蒙皮辐射在8~14μm波段内占有极重要的地位的3个原因:1)蒙皮辐射的峰值波长约为10μm,正好处在8~14μm波段范围内;2)此波段的宽度较宽;3)飞机蒙皮的面积非常大,它的辐射面积比喷口面积大许多倍。
第三章声探测技术1.声压:声音为纵波,其传播引起空气的疏密变化,从而引起气压的变化,该压力与大气压的差值即为声压。
2.声强:垂直于传播方向的单位面积上声波所传递的能量随时间的平均变化率,也就是单位面积上输送的平均功率。
探测与识别技术
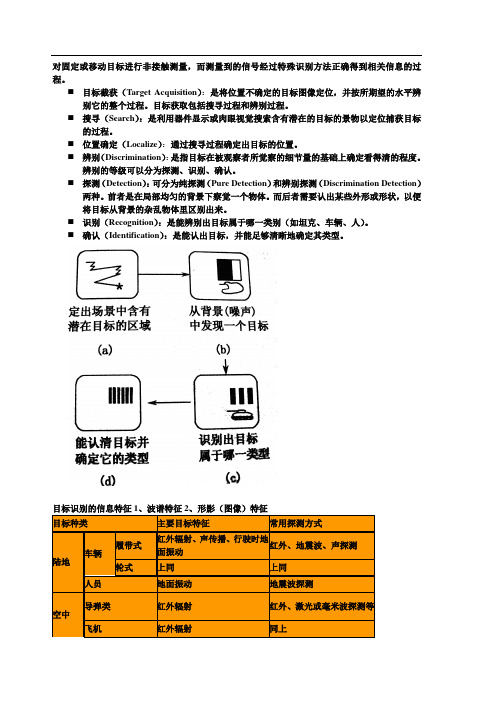
对固定或移动目标进行非接触测量,而测量到的信号经过特殊识别方法正确得到相关信息的过程。
⏹目标截获(Target Acquisition):是将位置不确定的目标图像定位,并按所期望的水平辨别它的整个过程。
目标获取包括搜寻过程和辨别过程。
⏹搜寻(Search):是利用器件显示或肉眼视觉搜索含有潜在的目标的景物以定位捕获目标的过程。
⏹位置确定(Localize):通过搜寻过程确定出目标的位置。
⏹辨别(Discrimination):是指目标在被观察者所觉察的细节量的基础上确定看得清的程度。
辨别的等级可以分为探测、识别、确认。
⏹探测(Detection):可分为纯探测(Pure Detection)和辨别探测(Discrimination Detection)两种。
前者是在局部均匀的背景下察觉一个物体。
而后者需要认出某些外形或形状,以便将目标从背景的杂乱物体里区别出来。
⏹识别(Recognition):是能辨别出目标属于哪一类别(如坦克、车辆、人)。
⏹确认(Identification):是能认出目标,并能足够清晰地确定其类型。
目标识别的信息特征1、波谱特征2、形影(图像)特征目标种类主要目标特征常用探测方式陆地车辆履带式红外辐射、声传播、行驶时地面振动红外、地震波、声探测轮式上同上同人员地面振动地震波探测空中导弹类红外辐射红外、激光或毫米波探测等飞机红外辐射同上声压就是大气压受到扰动后产生的变化,即为大气压强的余压,它相当于在大气压强上的叠加一个扰动引起的压强变化。
声强是垂直于传播方向的单位面积上声波所传递的能量随时间的平均变化率,即单位面积上的平均功率。
采用对数强度叫做声强级 由“声纳”是英文缩拼读音的谐音,其原意是“声音导航和测距”,是利用声波进行水下探测、识别、定位和通信的电子设备⏹ 由纵波和横波叠加而成的,沿介质表面传播,并随传播深度的增加而呈指数衰减。
⏹ 运动轨迹为逆进椭圆,弹性介质的质点运动在地表处位移的水平分量与垂直分量的幅值比约为2/3 。
空间目标探测与识别技术及国外发展现状
现在美国使用了近20部雷达(UHFNI-IF波段的AITA取雷达,C波段的FPQ-14雷 达,X波段的Haystack雷达等)以及光电望远镜等光学设备用于探测和监视空间目标,其 空间目标监视系统构成了一个遍布全球的空间目标监视网。袁1为美国空间监视网地基监 视设备主要组成。
系统
相控阵雷达探 测系统
光电目标识别:指通过光电探测系统获取目标的辐射信息或图像信息,并对目标的辐 射/图像信息进行特征提取、处理、分析,最终达到目标几何特征、组成、功能的识别。光 学观测可以获取空间目标反射的可见光亮度、光学图像和红外辐射光谱。利用空间目标的 可见光亮度或红外辐射光谱的变化规律,可以推算目标的姿态稳定情况,再根据卫星的姿 态变化可以将工作卫星从大量的空间垃圾和失效卫星中区分出来;根据自适应光学望远镜 获取的高分辨率光学图像,可推算出目标的几何参数,并据此进行目标识别;红外光谱与 卫星太阳帆板材料、星体表面涂料和有效载荷材料等有关,根据红外光谱信号特征可以达 到识别同一批次或不同类型卫星的目的;此外,利用高分辨率的红外光谱信息和温度特性 还可以对空间目标进行细微特征识别和对有效载荷进行工作状态识别。光电目标识别采用 若干技术从不同的物理特征进行识别。主要的方法有:光度法识别、目标图像特征识别、
3.1 美国空间目标探测与识别技术发展现状
美国出于利用空问和控制空闯的战略需耍,从60年代就开始建设。空间探测与跟踪 系统”(APADATS),并随着技术的进步而不断完善,现已建立了庞大且完备的空间目标监 视系统。美国目前的空间目标识别研究主要集中在雷达数据的近实时处理和二维雷达成像 以及二维ISAR图像的特征提取上.20世纪50年代末,D.ICBarton用AN/FPS.16型跟踪 雷达详细记录了苏联刚发射的第二颗人造卫星SpubalkⅡ的回波信号;20世纪60年代末, 林肯实验室为高级研究计划署研制的C波段观测雷达(简称ALC017.)获得了近地空间目 标高质量的雷达图像;20世纪70年代末,以MⅡ林肯实验室研制的远距离成像雷达(LRIR) 为代表,探测距离可达人造卫星同步轨道,分辨率为25era,实现了对远距离快速旋转目标 的二维雷达成像:目前,现有的Haystack雷达是一部深空空闯成像雷达.可以产生25era 分辨率的雷达距离多普勒图像。
目标探测与识别技术

1.3 目标探测与识别技术对引信发展的意 义
进行多维处理需要产生多功能的“最佳”雷达信号波形并以适当的方式 发送和接收,利用这种编码信号为雷达提供一个包括时间域、频率域、幅 度域乃至极化的工作环境。信息处理器则用来对多个域的数据以矢量方 式进行处理,这样就可以在时间、频率、幅度、到达方向和极化等方面对 信号检测和定位。这种方法的主要优点在于它可以收集更多的能量,可以 利用不同信号域之间的交叉信息,降低在所有信号域中同时出现干扰的概 率,采用这种设计的毫米波雷达导引头在探测、识别、确定目标位置、延 伸域轮廓形状等方面的准确度、分辨率、抗干扰能力、自适应能力等都 会有所改进。
所谓高新技术弹药,指的就是采用了末端制导技术、末端敏感技术、弹道 修正技术等目标探测与识别技术,具有精确打击能力的弹药,此类弹药具 备一定的目标探测功能。
上一页 下一页 返回
1.2 引信目标探测与识别技术的军事需求
图1-1给出了常用的目标探测工作方式,其中末制导技术根据制导的方式 不同,分别可使用可见光、红外、毫米波、声、静电等探测技术。通过目 标识别,控制弹丸跟踪、命中目标。目前正在发展和实际采用的制导方式 有自主式制导系统、遥控制导系统、寻的制导系统和复合制导系统,其中 20世纪80年代装备部队并在战场上使用的主要产品有美国的 M712Copperhead “铜斑蛇”激光制导炮弹和苏联/俄罗斯的“红土 地”2K25式激光末制导炮弹系统。
1.2.3 水下反鱼雷的发展需要自19世纪鱼雷问世到21世纪的今天,世界各 国在鱼雷的研制方面都有了长足的进展。西方主要国家的由水面舰艇发 射的反舰鱼雷虽然已被舰对舰导弹所代替,但是潜艇作为一种隐蔽的鱼雷 运载工具和发射平台,随着其技术的发展及发射的鱼雷越来越先进,对舰 船的威胁从某种意义上讲比反舰导弹更严重。
雷达跟踪系统中的目标探测与识别技术
雷达跟踪系统中的目标探测与识别技术雷达技术一直在航空、导航、军事等领域扮演着重要的角色。
雷达跟踪系统中的目标探测与识别技术是其中至关重要的一环。
本文将探讨雷达目标探测与识别的相关技术,以及当前的研究和发展趋势。
第一部分:目标探测技术雷达目标探测是指利用雷达系统进行目标的探测与确认。
传统上,雷达系统使用连续波雷达或脉冲雷达进行目标的探测。
连续波雷达通过发送连续的电磁波并接收被目标散射的波,根据接收到的信号来判断目标是否存在。
脉冲雷达则利用发射短时脉冲的方式来检测被目标反射的脉冲信号。
然而,随着科技的不断发展,新的目标探测技术也应运而生。
比如,目标探测技术中的成像雷达,它能够获取目标的图像信息,从而实现对目标的更准确的探测。
成像雷达通过发射短脉冲序列,并利用波束形成和合成孔径雷达技术,可以获取目标的三维形状和位置信息。
第二部分:目标识别技术雷达目标识别是指根据目标的雷达特性,对目标进行分类和识别。
传统上,目标识别主要依靠目标的回波信号的特征,如目标的反射截面、多普勒频移等。
基于这些特征,通过与数据库进行匹配或者使用特征提取算法,可以对目标进行分类和识别。
近年来,随着人工智能和深度学习的发展,新的目标识别技术也逐渐兴起。
深度学习技术可以从大量的数据中学习和识别特征,从而实现对目标的自动分类和识别。
例如,通过构建深度神经网络模型,并使用大量的雷达图像数据进行训练,可以实现对雷达目标的高效自动识别。
第三部分:研究和发展趋势雷达目标探测与识别技术正不断地发展和演进。
未来的研究和发展趋势有以下几个方向:1. 多传感器融合:将雷达与其他各种传感器技术相结合,如红外传感器、光学传感器等,以形成更完整、准确的目标探测与识别系统。
2. 多维信息提取:除了传统的距离和速度等信息外,还可以提取更多维度的信息,比如目标的形状、材料组成等,以更全面地识别和判别目标。
3. 实时目标跟踪:目标跟踪是对目标在时间上的连续追踪。
未来的目标跟踪技术将更加注重对目标的轨迹、运动模式等动态信息的捕捉和分析。
国外空间目标探测与识别系统发展现状研究
国外空间目标探测与识别系统发展现状研究一、本文概述随着科技的不断进步,空间领域的探索与利用已成为全球竞争的重要焦点。
空间目标探测与识别系统作为空间领域的重要组成部分,对于国家安全、空间科学研究以及空间资源开发等方面具有重要意义。
本文旨在全面梳理和分析国外空间目标探测与识别系统的发展现状,以期为我国的空间领域研究和应用提供有益的参考。
本文首先界定了空间目标探测与识别系统的基本概念和主要功能,为后续研究奠定基础。
接着,从技术角度对国外空间目标探测与识别系统的发展历程进行回顾,梳理了关键技术的演变和进步。
在此基础上,对国外空间目标探测与识别系统的应用领域和典型案例进行深入分析,揭示了其在国家安全、空间科学研究以及空间资源开发等方面的重要作用。
本文还对国外空间目标探测与识别系统的发展趋势进行展望,探讨了未来可能的技术创新和应用拓展。
结合我国的实际情况,提出了针对性的建议和思考,以期推动我国空间目标探测与识别系统的发展和应用。
通过本文的研究,我们可以更全面地了解国外空间目标探测与识别系统的发展现状和趋势,为我国在该领域的研究和应用提供有益的参考和借鉴。
也为我国空间领域的科技创新和国家安全建设提供有力的支撑。
二、国外空间目标探测与识别系统概述随着科技的飞速发展,空间目标探测与识别技术逐渐成为世界各国竞相研究的热点领域。
目前,美国、俄罗斯、欧洲等国家和地区在空间目标探测与识别技术方面均取得了显著的进展。
美国作为空间科技领域的领先者,其空间目标探测与识别系统发展尤为成熟。
美国国防部建立了一套完善的空间监视网络,包括地基和空间基传感器,用于实时监测和跟踪在轨空间目标。
美国还积极开发高分辨率成像技术、光学和红外探测技术等,以提高对空间目标的识别精度和分辨率。
俄罗斯作为航天大国,其空间目标探测与识别技术同样具备较高水平。
俄罗斯通过构建全球性的空间监测网络,实现对空间目标的全面覆盖和实时监测。
同时,俄罗斯还注重提高空间目标探测的自动化和智能化水平,以减少人工干预和提高探测效率。
目标探测与识别技术
1.1 目标探测与识别技术的地位与定义
近十几年,随着现代科学技术的飞速发展,目标探测与识别技术发生了日 新月异的变化,在工业、农业,特别是军事斗争的需求牵引下,毫米波探测、 激光定距探测、主被动声探测、磁探测、地震动探测等都有了极大的技 术进步。在现代武器中,为了达到最佳作用效能,需要引信实时判断弹体 本身或弹目相对位置,甚至对目标进行识别,对引信提出了更高的要求,因 而引信目标探测与识别具有重要的意义。
1.2.2 “新三打三防” 战术发展的需求 随着国际形势发生变化,中国人民解放军在20世纪90年代末提出了“新
三打三防”为内容的军事训练科目。 所谓“新三打”,就是指打武装直升机、打巡航导弹、打隐形飞机。
上一页 下一页 返回
1.பைடு நூலகம் 引信目标探测与识别技术的军事需求
武装直升机是配有机载武器和火控系统,用于空战或对地面、水面或水下 目标实施空中攻击的直升机的统称,包括各种攻击直升机、歼击直升机以 及装有机载武器和火控系统的其他直升机,如美国的“阿帕奇”攻击直升 机、俄罗斯的“蜗牛”反潜直升机、法国的“黑豹”攻击/空战直升机、 印度的“印度豹”攻击直升机等。武装直升机具有低空突防、防空雷达 难于探测的优点,因而在现代战争中发挥出日益重要的作用。例如,2003 年4月20日美英联军对伊拉克战争中,武装直升机起到了对地面控制的关 键作用,迫使伊拉克士兵只能分散作战,不能形成大规模的战役决战。在 这种非线性、不对称战争中,传统的防空武器面临巨大的挑战。
上一页 下一页 返回
1.2 引信目标探测与识别技术的军事需求
,从而在战时和平时都可以迅速、准确、全面掌握地方的情况,为实时采 取相应的对策提供依据。在防侦察方面,随着传感器的发展和信息革命的 到来,侦察信息的获取和处理已进入一个全新的时期,如无人值守传感器 系统(UGS)就是各国正在发展的防侦察、对地面目标探测、对战场监视 的手段之一。作为对空中目标探测以及区域入侵报警的装备,它一般设置 在地面上,通过多种传感器自动收集远距离目标的信息而无须人工干预, 并与控制中心通信,具有极好的抗干扰性和保密特性。多传感器探测与控 制网络系统的功能结构如图1-3所示,地震动/声传感器和红外复合探测入 侵信息,通过基本模块及处理电路把信息通过天线发向指挥系统。
水下目标探测与识别技术
SAS技术发展过程中遇到的两个主要的技术瓶颈:第一个问题:系统平台的测绘速率问题。由于合成孔径技术的苛刻条件,方位向进行的充分采样与声速较低的传播速度,使得平台的行进速度受到严格约束,测绘速率低下。通过采用方位向的阵列技术,将多个接收器在方位向组成阵列,同时接收目标区域的回波信号,提高了数据采样率,使得测绘速率得到改善。第二个问题:平台的随机运动问题。在数据采集过程中,由于扰动造成的系统平台偏离直线路径,仅靠平台的导航装置只能得到数据的较低精度运动信息,无法成功的进行合成孔径处理。
SAS技术研究:
实际处理时,一般将运动补偿分为粗运动补偿(Coarse MOCOMP)和细运动补偿(Fine MOCOMP)(或称为微导航)两个部分。前者主要是利用导航工具获得的数据信息进行纠正,而后者则是在前者处理的基础上,利用数据自身的自聚焦方法进一步进行补偿纠正,从而最终获得清晰的SAS图像。
1965年,Wiley申请到了首个SAR的技术专利;1969年,Walsh申请了 “Acoustic Mapping Apparatus声学定位装置”专利,首次将合成孔径技术应用于水下侧扫声纳;70年代受阻,几乎处于停滞状态;1978年,Gilmour的专利使用了拖弋阵列平台,突破了单接收器声纳的速度约束;几乎在同时,Cutrona在理论上论证了 SAS的可行性,并强调了方位向接收器阵列的重要性,这些研究给SAS技术的发展带来了新的动力;1983年,Spiess和Anderson申请专利,利用两个独立接收。阵列的相位干涉测量水深度。
本章小结
感谢阅读
感谢阅读
合成阵列
L为合成孔径。对于条带式系统,L的取值有一定的限制。其中,R为到目标点的距离。分辨率与距离和波长成正比,与孔径长度成反比。
可见光相机探测 识别 辨认方法

可见光相机探测识别辨认方法【导语】可见光相机作为一种常见的成像设备,广泛应用于安防监控、自动驾驶、生物识别等领域。
其探测与识别技术直接关系到相机系统的性能和应用效果。
本文将详细介绍可见光相机探测与识别的方法,帮助读者深入了解这一技术领域。
一、可见光相机探测方法1.光学成像原理:可见光相机通过镜头收集光线,将物体表面的光信号转换为电信号,经过处理后得到图像。
探测方法主要依赖于光学成像原理,通过调整相机的曝光时间、光圈大小等参数,实现对不同亮度、对比度场景的适应。
2.自动对焦技术:为了获得清晰的图像,可见光相机通常采用自动对焦技术。
自动对焦方法包括:相位检测、反差检测、激光对焦等。
这些方法能够帮助相机在不同距离、不同场景下实现快速、准确的对焦。
3.红外补光技术:在低光照环境下,可见光相机的成像效果会受到影响。
为了提高探测能力,可以采用红外补光技术,通过发射红外光,增强被拍摄物体的亮度,从而提高成像质量。
二、可见光相机识别方法1.图像处理技术:图像处理技术是可见光相机识别的关键。
主要包括:图像增强、边缘检测、轮廓提取、图像分割等。
这些技术能够提高图像的质量,便于后续的识别处理。
2.特征提取与匹配:特征提取是识别过程中的重要环节。
常用的特征提取方法有:SIFT、SURF、ORB等。
特征匹配则利用提取到的特征点,通过相似性度量(如欧氏距离、汉明距离等)找到匹配点,从而实现识别。
3.机器学习与深度学习:近年来,机器学习与深度学习技术在可见光相机识别领域取得了显著成果。
常见的识别算法有:支持向量机(SVM)、卷积神经网络(CNN)等。
这些算法通过对大量样本进行训练,可以实现对不同场景、不同目标的识别。
4.识别应用实例:- 人脸识别:通过提取人脸图像的特征点,利用深度学习算法进行识别,应用于安防、支付、身份认证等领域。
- 车牌识别:对车辆牌照进行图像处理、特征提取和匹配,实现自动驾驶、违章抓拍等功能。
- 行为识别:分析视频中的目标运动轨迹、姿态等信息,实现对特定行为的识别,应用于安防、健康监护等领域。
探测与识别技术

探测与识别技术引言探测与识别技术是现代科技中不可或缺的一部分,因为它能在多个领域中为人类带来极大的便利和利益。
本文将介绍探测与识别技术的基本原理和常见应用领域,并探讨其在未来的发展趋势和挑战。
一、探测技术1. 基本原理探测技术是指通过不同形式的能量或信号来获取对某物体、现象或信号的识别、检测、监测和测量等信息过程,其基本原理是将物体或现象转化为可测量的信号并通过信号处理装置进行处理后输出结果。
2. 常见探测技术(1)雷达技术雷达技术利用电磁波在空气或其他介质中的传输和反射,通过测量信号的时间差和频率差等特征来识别、跟踪和探测目标。
广泛应用于航空、军事、气象、地质勘探等领域。
(2)红外技术红外技术利用红外光的能量和波长与物体的特定属性相互作用,通过感应和探测物体发出的红外辐射或对周围红外辐射的反应来进行识别、跟踪和探测。
广泛应用于安防、医疗、工业生产等领域。
(3)毫米波技术毫米波技术是一种高频、高分辨率的无线通信技术,其利用毫米波的短波长和高频率来进行高速数据传输和远距离通信。
此外,毫米波技术还可用于跨境追踪、边境安全、人员筛查等领域。
二、识别技术1. 基本原理识别技术是指通过对目标物或信息进行分析、比对和匹配等操作,从而确定其身份或特征的技术过程。
其基本原理是将目标物转化为可测量的数据,并通过模式识别和数据挖掘等算法来进行分析和识别。
2. 常见识别技术(1)生物识别技术生物识别技术是一种通过人体生理特征进行身份识别的技术,如指纹识别、虹膜识别、面部识别等。
生物识别技术应用于人员出入、金融支付、医疗健康等领域,受到广泛关注和研究。
(2)智能图像识别技术智能图像识别技术利用计算机视觉和机器学习技术,从图像和视频等多种媒介中识别目标物和特征,并将其分类或归集。
智能图像识别技术应用于智能安防、智能交通、智能医疗等领域。
(3)语音识别技术语音识别技术是利用计算机视觉和人工智能技术,将人的声音信息转化为数字信号并进行语音分析和比对,以实现自动识别和处理。
探测与识别技术

对固定或移动目标进行非接触测量,而测量到的信号经过特殊识别方法正确得到相关信息的过程。
⏹目标截获(Target Acquisition):是将位置不确定的目标图像定位,并按所期望的水平辨别它的整个过程。
目标获取包括搜寻过程和辨别过程。
⏹搜寻(Search):是利用器件显示或肉眼视觉搜索含有潜在的目标的景物以定位捕获目标的过程。
⏹位置确定(Localize):通过搜寻过程确定出目标的位置。
⏹辨别(Discrimination):是指目标在被观察者所觉察的细节量的基础上确定看得清的程度。
辨别的等级可以分为探测、识别、确认。
⏹探测(Detection):可分为纯探测(Pure Detection)和辨别探测(Discrimination Detection)两种。
前者是在局部均匀的背景下察觉一个物体。
而后者需要认出某些外形或形状,以便将目标从背景的杂乱物体里区别出来。
⏹识别(Recognition):是能辨别出目标属于哪一类别(如坦克、车辆、人)。
⏹确认(Identification):是能认出目标,并能足够清晰地确定其类型。
声压就是大气压受到扰动后产生的变化,即为大气压强的余压,它相当于在大气压强上的叠加一个扰动引起的压强变化。
声强是垂直于传播方向的单位面积上声波所传递的能量随时间的平均变化率,即单位面积上的平均功率。
采用对数强度叫做声强级 由“声纳”是英文缩拼读音的谐音,其原意是“声音导航和测距”,是利用声波进行水下探测、识别、定位和通信的电子设备⏹ 由纵波和横波叠加而成的,沿介质表面传播,并随传播深度的增加而呈指数衰减。
⏹ 运动轨迹为逆进椭圆,弹性介质的质点运动在地表处位移的水平分量与垂直分量的幅值比约为2/3 。
⏹ 瑞雷波的传播速度略小于同一介质中横波的传播速度。
⏹ 一般来讲,瑞雷波频率较低,其主要频率成分集中在0~140Hz 范围内。
在均匀介质条件下,瑞雷波的频率与其传播速度无关;而在非均匀介质条件下,瑞雷波速度随频率变化而变化。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
美国国家导弹防御系统-红外线预警卫星
以美国幼畜型为代表的空地导弹采用了红外 成象制导,它可在一定恶劣气候下昼夜使用。
“幼畜”(Maverick)AGM-65空地导弹
二、跟踪系统的组成及工作原理
1.跟踪系统的组成
红外跟踪系统包括方位探测系统和跟踪机 构两大部分。方位探测系统由光学系统、调 制盘、探测器和信号处理电路四部分组成.
右为电阻式热探测器
2、光子探测器
光子探测器是利用红外线中的光子流射到探测 器上后,和探测器材料中的束缚态电子作用后, 引起电子状态的变化,从而产生能逸出表面的自 由电子,以此来探测红外线。
四象限光 电探测器
(1)光子探测器的特点
光子探测器的反应时间短,但要使物体 内部的电子改变运动动态,入射的光子能 量必须足够大。当光子能量小于某一值时, 就不能使束缚状态电子变成载流子或能逸 出材料表面的自由电子。
阻挡层内存在内电场E如图下所示
++++++++++
P
E
N
U
4.光磁电探测器
光磁电探测器由一薄片本征导体材料和一块
磁铁组成。当入射光子产生电子空穴对时,它
们被外加磁场分开形成电动势。 这类探测器
不需要致冷,可响应到7微米,时间常数也小。
但由于其灵敏度较前两种低,故目前应用较少。
三、红外探测器的致冷
美国的AIM-9
萨姆-7
导弹预警卫星
导弹预警卫星是一种较特殊的成像卫星,通过对导弹发射主 动段羽焰的红外辐射等探测成像,将红外辐射图像信号变换为 数字化电信号传输,经处理识别后提供敌方导弹袭击的预警信 号。预警卫星和平时期可用于监视导弹试验、航天发射活动, 战争时期则专门监视和跟踪敌方弹道导弹发射,从而实现在导 弹主动段早期预警的目的,可以使预警时间增加到半个小时左 右。
光电二极管
光电倍增管
光电探测器的工作原理
光电探测器,存在一个长波限。长波限的 存在可以从光量子理论得到解释。根据光 量子理论,认为辐射能量是以粒子形式存 在的,这种粒子称为光子。其公式为:
当入射光子与材料中的电子相遇碰撞时, 光子就消失而将其全部能量转给了电子。 若光子的能量大于探测器材料的电子逸 功率,电子就可逸出材料的表面 。根据 此原理爱因斯坦提出了光电发射公式:
• 红外搜索系统 • 目标红外探测系统 • ……
1 2 hc mv hv W W 2
2、光电导探测器
当光照射到某些半导体材料上后,光 子与半导体内的电子作用后,会形成 载流子,载流子会使半导体的电导率 增加,这种现象称为光电导现象。
半导体材料
利用光电导现象制成的 探测器叫 光电导探测器。常见的 光电导器件 由硫化铅、硒化铅、锑化铟等材料 制成。这是红外技术中应用最广泛
可以做成P型半导体和N型半导体.
3.光生伏特探测器
在P型,N型半导体接触面处会形成一个 阻挡层。在阻挡层内存在内电场E,如果 光照射在结附近,由光子激发而形成光 生载流子,由于内电场的作用,光生载 流子的电子就会跑到N区,而空穴就跑 到P区,这时在P-N结两侧就会出现附加 电位差,这一现象称为“光生伏特”效 应。
的热效应而工作的。
1、热探测器
当红外线辐射到热探测器上后,探测器 材料的温度会上升,温度的变化会引起某 些物理特性相应发生改变,利用测量这些 物理特性的改变程度来确定红外辐射的强 弱,这样的探测器称为热探测器。
热探测器的特点
热探测器要利用材料受到热辐射后温度的 上升来测量的,因而反应时间较长,时间常 数一般在毫秒级以上,这类探测器的另一个 特点是对全部波长的热辐射基本上都有相同 的响应。
红外探测技术
吴剑燊0701510429 杨 翔 0701510432
红外探测器概述 • 什么是红外探测器?
红外探测器实际上是一种红外线辐射能 的转换器。它把辐射能转换成另一种便于测 量的能量形式。
一、红外探测器的分类
对于探测和跟踪目标的探测器,按照探测
过程的物理机理,可分为两类,即热探测
器和光子探测器,热探测器是利用红外线
外 光 电 光子探测器 内 光 电 光伏特探测器
光电探测器
光电导探测器
光磁电探测器
1.光电探测器
当光照射到某些材料的表面上时,如果入射光子的能 量足够大,就能够使电子逸出材料的表面,这种现象 称为外光电效应。利用这种效应制成的探测器,称之 为光电探测器。
光电效应原理图
常用的光电探测器有光电二极管 和光电倍增管。
方位探测系统
跟踪机构
2、跟踪系统工作原理
当目标位于光轴上时,方位探测系统无误差 信号输出。由于目标的运动,使目标偏离光轴, 系统便输出与失调角相对应的方位误差信号。 该误差信号送入跟踪机构,跟踪机构便驱动位 标器向着减小失调角的方向运动.
q
qm
qt 位标器
基准线
红外成像技术
红 外 成 象 技 术 的 基 本 原 理
1.致冷的必要性 目前性能较好的探测器均需要冷却,致 冷可以降低热激发产生的载流子,从而降 低探测器的噪声;致冷在一定程度上也可
减少禁带宽度,从而加大载止波长 。
2.致冷的方法
目前对红外探测器的致冷有多种方法,按照换 热 方式,可大体分为:
(1)利用低温液体或气体进行对流换热而致冷探测器。
(2)利用固体传导换热而致冷探测器的固体致冷器。
红外跟踪系统可以对点源目标和扩展源目标
进行跟踪。红外跟踪系统与测角机构组合在 一
起,便组成红外方位仪。红外跟踪系统在导弹
的制导系统中应用越来越广泛。
红外制导最早应用于空空导弹,近三十
年来在技术上不断改进.
目前已出现了以美国的AIM-9L,法国的 R550等为代表的典型格斗导弹,红外地空导弹, 如苏联的萨姆-7、美国的针刺型.
日本滨松 光子--光电管探测器
在导弹的红外制导系统中,由于要求 灵敏,反应快。一般采用光子探测器。
导 弹
PL-9C 红 外 空 空
挂装在武装直升机上的 TY90导弹
二、光子探测器分类及工作原理
光子探测器是基于入射光子对探测器材料内的 电子作用而产生的光电子效应而工作的。光电子 效应有外光电效应和内光电效应两种。
(3)利用辐射散热而致冷的辐射致冷器。 (4)利用珀尔贴效应而致冷的半导体致冷器。 (5)其他。
红外技术的应用
红外目Байду номын сангаас跟踪系统
一、跟踪系统的功用
跟踪系统用来对运动目标进行跟踪。 当 目标运动时,便出现了目标相对于系统测量 基准的偏离量,系统测量元件测量出目标的 相对偏离量,并输出相应的误差信号送入跟 踪机构,跟踪机构便驱动系统的测量元件向 目标方 向运动,消除其相对偏离量,使测量 基准对准目标,从而实现对目标的跟踪。
的一类探测器。
在纯净半导体中,当价电子受到热或 光子的 激发而跳到导带后,在价带中就 留下了一个空穴,电子和空穴对材料导电 率都有提高作用。 这种在纯净半导体中, 一个电子从价带被激发到导带的过程叫本 征激发。
本征激发
为了使探测器能在较长的波段工作,需要
增大探测器的截止波长。一般在纯净半导体
中掺入少量其他杂质,根据掺入的杂质不同,