双轴倾角传感器的设计与实现
双轴倾角传感器的工作原理

双轴倾角传感器的工作原理双轴倾角传感器是一种用于测量物体在水平和垂直方向上的倾斜角度的装置。
它通常由两个单轴倾角传感器组成,分别测量物体相对于水平和垂直方向的倾斜角度,并将结果合并以提供更准确的测量结果。
单轴倾角传感器在了解双轴倾角传感器之前,首先需要了解单轴倾角传感器的工作原理。
单轴倾角传感器通过利用重力和加速度计原理来测量物体相对于水平方向的倾斜角度。
单轴倾角传感器通常包含一个加速度计和一个微机电系统(MEMS)芯片。
加速度计是一种能够测量物体加速度的装置,而MEMS芯片则是一种集成了多个微小机械元件的芯片。
当物体处于静止状态时,加速度计会受到重力的作用,产生一个与重力大小相等但方向相反的加速度。
这个加速度会被加速度计测量并转换为电信号。
MEMS芯片中包含微小机械元件,这些元件可以根据测得的电信号来确定物体相对于水平方向的倾斜角度。
一种常见的设计是利用微小弹簧和质量块组成一个振动系统,通过测量振动频率的变化来计算倾斜角度。
双轴倾角传感器双轴倾角传感器在单轴倾角传感器的基础上进行了扩展,它包含两个单轴倾角传感器,分别用于测量物体相对于水平和垂直方向的倾斜角度。
双轴倾角传感器通常采用一个三维加速度计和一个三维陀螺仪来实现。
加速度计仍然负责测量重力加速度,并通过MEMS芯片将其转换为电信号。
而陀螺仪则可用于测量物体的旋转速度。
在双轴倾角传感器中,两个单轴倾角传感器分别与水平和垂直方向对齐。
通过将两个单轴传感器的测量结果合并,可以得到物体相对于水平和垂直方向的综合倾斜角度。
具体而言,当物体同时发生旋转和倾斜时,陀螺仪可以提供旋转角速度的测量结果,而加速度计则可以提供倾斜角度的测量结果。
通过将这两个结果进行合并,就可以得到物体在水平和垂直方向上的综合倾斜角度。
双轴倾角传感器通常还包含一个微处理器,用于处理和计算传感器的测量结果。
微处理器可以根据传感器提供的数据来计算出物体在水平和垂直方向上的实际倾斜角度,并将结果输出给用户。
高精度双轴倾角传感器 SCA100T

高精度双轴倾角传感器SCA100T
SCA100T是基于3D-MEMS技术的双轴倾角传感器系列,具有仪表级性能,用于水平垂直测量。
其传感单元的测轴分别与水平和垂直面平行。
具有低的温度影响,高分辨率,低噪声,抗干扰设计,是水平测量的理想选择。
VTI公司的倾角传感器有超阻尼敏感单元,故可承受高达20000g的机械冲击。
*(MEMS是微机电系统[Micro-Electro-Mechanical Systems]的缩写。
MEMS主要包括微型机构、微型传感器、微型执行器和相应的处理电路等几部分,它是在融合多种微细加工技术,并应用现代信息技术的最新成果的基础上发展起来的高科技前沿学科。
)
技术规格。
基于MEMS加速度传感器的双轴倾角设计及其应用(精)

基于MEMS加速度传感器的双轴倾角设计及其应用作者姓名:刘武发, 蒋蓁, 龚振邦引言MAV由于体积和负载能力极为有限,因此,减小和减轻飞控导航系统的体积及重量,就显得尤为重要。
本文基于MEMS加速度传感器,设计一种双轴倾角计,该装置精度高、重量轻,可满足MAV的姿态角测量要求,也可用于其他需要体积小、重量轻的倾角测量设备上。
MEMS加速度传感器ADXL202是最新的、低重力加速度双轴表面微机械加工的加速度计,以模拟量和脉宽调制数字量2种方式输出,并具有极低的功耗和噪音。
表面微机械加工使加速度传感器、信号处理电路高度集成于一个硅片上。
和所有加速度计一样,传感器单元是差动电容器,其输出与加速度成比例。
加速度计的性能依赖于传感器的结构设计。
差动电容是由悬臂梁构成,而悬臂梁是由很多相间分布的指状电容电极副构成,一副指状电容电极可简化为图1所示的结构。
每个指状电极的电容正比例于固定电极和移动电极之间的重叠面积以及移动电极的位移。
显然,这些都是很小的电容器,并且,为了降低噪声和提高分辨力,实际上需要尽可能大的差动电容。
悬臂梁的运动是由支撑它的多晶硅弹簧控制。
这些弹簧和悬臂梁的质量遵守牛顿第二定律:质量为m 的物体,因受力F而产生加速度a,则F =m a。
而弹簧的形变与所受力的大小成比例,即F = kx,所以x = (m / k) a ,式中x为位移, m; m 为质量, kg; a为加速度, m / s2 ; k为弹簧刚度系数, N /m。
因此,仅有支撑弹簧的刚度和悬臂梁的质量2个参数是可控的。
减小弹簧系数似乎是提高悬臂梁灵敏度的一种容易方法,但悬臂梁的共振频率正比例于弹簧系数,所以, 减小弹簧系数导致悬臂梁共振频率降低,而加速度计必须工作在共振频率之下。
此外,增大弹簧系数使悬臂梁更坚固。
所以,如果保持尽可能高的弹簧系数,只有悬臂梁的质量参数是可变化的。
通常,增大质量意味着增大传感器的面积,从而使悬臂梁增大。
双轴倾角传感器测试台的设计与实现
直 流 电 压 经 爱 立 信 公 司 生 产 的 D / C 降 压 模 块 CD
B MR 1 1 / 7产生 。 9 02 2 3
X。 y 是标 准倾 角 传 感 器 的输 出值 ,X。和 y 和 2 是被 测倾 角传 感器 的输 出值 , 当其 输 出分 辨率不 足 时 ,
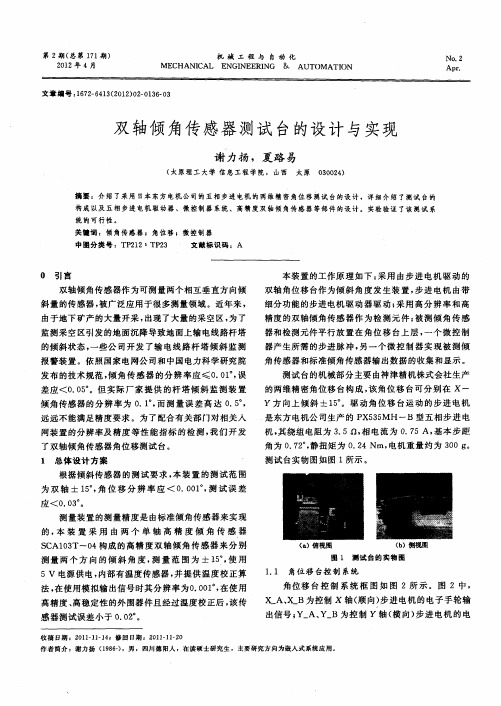
的 , 装 置 采 用 由 两 个 单 轴 高 精 度 倾 角 传 感 器 本
S A1 3 - 0 C 0 T- 4构成 的高 精度 双轴 倾 角传 感 器 来 分 别 测 量 两 个 方 向 的 倾 斜 角 度 , 量 范 围 为 士 1。 使 用 测 5, 5V 电源供 电 , 内部 有温 度传感 器 , 并提 供温 度 校正 算
发布 的技术 规范 , 角 传 感器 的分 辨 率 应≤ 0 0 。误 倾 . 1, 差应 <O 0 。 . 5。但 实际 厂 家 提 供 的杆 塔 倾 斜 监 测装 置 倾 角传 感器 的分 辨 率 为 0 1 , . 。 而测 量 误 差 高 达 0 5 , .。 远远 不能 满足精度 要求 。为 了配合 有关 部门对 相关入 网装置 的分 辨率及 精 度 等性 能 指标 的检 测 , 们 开发 我
■ ■
( )俯 视 图 a ( )侧 视 图 b
图 l 测 试 台 的 实 物 图
1 1 角 位 移 台控 制 系 统 .
法, 在使用 模拟 输 出信 号时 其分 辨率 为 00 1, .0。在使 用
高精 度 、 高稳定 性的外 围器 件且 经过 温度校 正后 , 传 该 感 器测试 误差 小于 0 0 。 . 2。
双 轴倾 角传 感 器 测 试 台的设 计 与实现
谢 力扬 ,夏路 易
( 原 理 : 大 学 信 息 工 程 学 院 , 山西 太 原 太 T - 002) 30 4
双轴倾角传感器原理

双轴倾角传感器原理一、引言双轴倾角传感器是一种常用的测量设备,用于测量物体在二维平面上的倾斜角度。
它广泛应用于工程、航空航天、建筑等领域。
本文将详细探讨双轴倾角传感器的原理、工作原理以及应用场景。
二、传感器原理双轴倾角传感器基于加速度计原理,利用重力加速度与传感器的倾斜角度之间的关系进行测量。
其工作原理可以分为四个步骤:2.1 加速度计双轴倾角传感器内部搭载了微机电系统(MEMS)加速度计。
加速度计通过检测物体的加速度来推导出倾斜角度。
常见的加速度计类型包括电容式加速度计和压阻式加速度计。
2.2 重力加速度测量当传感器处于水平位置时,重力对加速度计产生的作用相对较小,可以忽略不计。
但当传感器被倾斜时,重力将会使加速度计产生一个分量,该分量与倾斜角度成正比。
2.3 电子信号转换传感器将加速度计测量到的重力加速度转换为相应的电子信号。
通常使用模拟-数字转换器(ADC)将模拟信号转换为数字信号。
2.4 角度计算传感器根据已转换的数字信号计算出物体的倾斜角度。
常见的算法包括三角函数算法和卡尔曼滤波算法。
三、工作原理双轴倾角传感器通过使用两个加速度计分别测量物体在水平和竖直方向上的倾斜角度,从而得出物体的二维倾斜角度。
其具体工作原理如下:3.1 水平方向倾斜角度测量传感器通过与水平面平行放置的加速度计测量物体在水平方向上的倾斜角度。
当物体向左倾斜时,水平方向受到的重力加速度会增加;当物体向右倾斜时,水平方向受到的重力加速度会减小。
3.2 竖直方向倾斜角度测量传感器通过与竖直方向平行放置的加速度计测量物体在竖直方向上的倾斜角度。
当物体向上倾斜时,竖直方向受到的重力加速度会增加;当物体向下倾斜时,竖直方向受到的重力加速度会减小。
3.3 综合计算将水平方向和竖直方向的倾斜角度综合计算,就可以得到物体的二维倾斜角度。
这一计算通常使用三角函数算法或卡尔曼滤波算法。
四、应用场景双轴倾角传感器在众多领域都有广泛应用,下面列举几个常见的应用场景:4.1 工程测量双轴倾角传感器可以用于测量建筑物的倾斜度、道路的坡度等。
双轴倾角仪的工作原理

双轴倾角仪的工作原理双轴倾角仪是一种用于测量物体的倾斜角度的仪器。
它主要由两个传感器组成,每个传感器分别测量物体在水平和垂直方向的倾斜角度,并通过信号处理和计算来确定物体的整体倾斜角度。
双轴倾角仪的工作原理基于重力传感技术和加速度计原理。
重力传感技术利用重力对物体产生的作用力来测量物体的倾斜角度,而加速度计原理则利用在物体倾斜时产生的加速度来测量倾斜角度。
双轴倾角仪结合了这两种原理,从而能够同时测量物体在水平和垂直方向上的倾斜角度。
具体来说,双轴倾角仪一般使用微机电系统(MEMS)传感器作为重力传感器和加速度计。
MEMS传感器是一种通过微加工技术制造的微小传感器,它具有小巧、低功耗和高精度等特点,非常适合于制作倾角仪。
在双轴倾角仪中,重力传感器通常采用压阻或霍尔元件作为敏感元件。
这些敏感元件受到重力作用时会产生相应的变化,通过测量这些变化可以推算出物体在水平和垂直方向上的倾斜角度。
加速度计通常采用微机电系统中的微弹簧加速度计,它基于惯性原理工作。
当物体发生加速度变化时,微弹簧受到外力作用而发生形变,通过测量微弹簧的形变量可以推算出物体的加速度,从而得到倾斜角度。
双轴倾角仪还会配备信号处理和计算电路,用于处理从重力传感器和加速度计传回的信号,并计算出物体的整体倾斜角度。
在信号处理和计算过程中,常常需要校正仪器的误差,因为传感器在制造和使用过程中难免会存在一些误差。
校正的方法包括静态校准和动态校准。
静态校准是在采集物体静止时进行的,通过将仪器放置在平稳的水平面上,记录下重力传感器和加速度计的初始值,然后通过比较实际测量值和初始值来推算出误差并进行校正。
动态校准是在采集物体运动时进行的,通过监测物体的运动情况,结合加速度计的数据来修正误差。
一旦校正完成,双轴倾角仪可以准确地测量物体的倾斜角度。
它广泛应用于各种需要测量倾斜角度的领域,如建筑工程、地质勘探、航空航天等。
同时,随着技术的不断进步,双轴倾角仪的精度和性能还将得到进一步提高,以满足更加复杂和精细的测量需求。
双轴倾角测量系统设计与建模

9 9,它 代 表 了先 进 的低 成 本低 功 耗 领 域 双 轴 电 解 液 倾 角 传 感 器
技 术 的进 步 。 大 的全 金 属 结 构 可 提供 优 越 的耐 用 性 , 强 以及 出 众
战 。 外 , 类 传感 器高 昂 的价 格 也 在 某 种 程度 上 限制 了其 应 用 另 此
各 项 指 标 有 了显 著提 高 。
关键词 : 电解 液 , 角传 感 器 , 性 度 , 号采 集 电路 , 倾 线 信 建模
Ab tac sr t
F u ng n h ai oc si o t e m a i p o ng he ie i m e suemen r n t m r vi t l ary n t a r t a ge,n r yn l ol ge nd t ly f u axs e l ea i ,ul i t v t a a sabi o d al i elc— i t tolt tts s , i p erpr s t a hi a cu a y an e ina gahe cr i ba e n t e s r t e、e p a u e ch r c— r y i i en or hs ap e ens gh c r c gl sg l t r i t c l t cu s o h tucur t m ert r a a t r t a mea ur ei i s cs nd s emen ul o tr e f071 7-4 9-9 s n or r 31 9 e s f Om F e r der k co p y. del g h o t t h r ctr an pr — i s c m an Mo i t e u pu c a a e d n e
芬兰CANopen双轴倾角传感器说明

芬兰CANopen倾角传感器说明一、接线说明二、通过串口设定传感器的各种参数通过串口设置传感器的CAN节点号和波特率等参数可以使用电脑自带的超级终端软件也可以使用其他的串口软件。
1、PC串口参数设定2、接线方式传感器端电脑9芯端TX0 2(RX)RX0 3(TX)GND(serial) 5(GND)3、串口数据格式传感器包含如下的串口命令设置:#SB250! 设定CAN口波特率为250kbit/s#RS! 显示当前设定#SI13! 发送数据时间间隔130ms如果发现通过串口修改传感器的节点号和波特率后,发现发送到CAN总线的数据并没有按照设定的节点号发送数据如设定的节点号是4,CAN口应该发送ID=0X184的数据,但是还是发送的以前的数据,说明修改数据并不成功请在修改数据后再发送保存命令和重新启动命令。
在数据设定修改好之后,请接着发送如下数据:#CR!#CSa!三、通过CAN口使用LSS命令设定传感器的节点号和波特率。
可以通过CAN口设定传感器的节点号和波特率参数,注意,在总线上面只能挂一个CAN倾角传感器。
1、修改CAN口的设备节点号1.1 设定传感器到LSS设定模式1.2 设定节点号Node-ID是16进制的。
如果设定正确,传感器返回数据如下:1.3 发送保存命令保存命令正确,传感器返回数据如下:1.4 发送命令使传感器退出LSS命令模式2.修改波特率2.1 发送命令使控制器进入LSS模式2.2 设定传感器的波特率波特率的可以使用的索引号如下:如果波特率设置正确,模块返回如下数据:2.3 发送命令使模块在设定时间后使用新设定的波特率<delay lsb>:延时时间的低字节。
<delay msb>:延时时间的高字节。
如可以发送如下命令:2.4 发送命令使传感器退出LSS模式四、通过CANopen使用其对应的索引和子索引设定传感器发送数据的COB-ID。
ID:控制器原节点号。
双轴倾角传感器的工作原理

双轴倾角传感器的工作原理一、引言双轴倾角传感器是一种常用的测量仪器,广泛应用于工业自动化、航空航天、地质勘探等领域。
其主要作用是测量物体在水平面和垂直面的倾斜角度。
本文将详细介绍双轴倾角传感器的工作原理。
二、双轴倾角传感器的结构双轴倾角传感器主要由两个部分组成:测量元件和信号处理电路。
其中,测量元件包括两个加速度计和一个微处理器,信号处理电路则包括滤波、放大和AD转换等功能模块。
三、加速度计的工作原理加速度计是测量物体加速度或重力加速度的仪器。
其基本原理是利用牛顿第二定律F=ma(F为力,m为质量,a为加速度)来实现测量。
常见的加速度计有机械式和电子式两种。
机械式加速度计采用弹簧系统或质点系统来实现测量,其优点是精度高,但缺点是体积大且易受外界干扰。
电子式加速度计则采用压电晶体或微电子机械系统(MEMS)来实现测量。
其中,压电晶体加速度计利用压电效应来实现测量,其优点是灵敏度高、响应速度快、体积小,但缺点是易受温度变化和机械震动影响;MEMS加速度计则采用微机电系统技术制造,其优点是体积小、功耗低、精度高,但缺点是价格较高。
四、双轴倾角传感器的工作原理双轴倾角传感器采用两个加速度计来测量物体在水平面和垂直面的倾斜角度。
其中,一个加速度计安装在X轴方向上,另一个加速度计安装在Y轴方向上。
当物体发生倾斜时,两个加速度计将检测到不同的重力分量,并将其转换为电信号输出。
具体来说,在水平面上,X轴方向的加速度计将检测到物体所受重力分量的sinθ值(θ为物体与水平面夹角),Y轴方向的加速度计则检测到cosθ值。
同理,在垂直面上,X轴方向的加速度计将检测到cosθ值,Y轴方向的加速度计则检测到sinθ值。
通过对这些信号进行处理和计算,就可以得到物体在水平面和垂直面的倾斜角度。
五、信号处理电路的作用双轴倾角传感器的信号处理电路主要包括滤波、放大和AD转换等功能模块。
其中,滤波模块用于去除信号中的高频噪声,保证测量结果的稳定性;放大模块则用于增强信号强度,提高测量精度;AD转换模块则将模拟信号转换为数字信号,方便存储和处理。
双轴倾角传感器原理

双轴倾角传感器原理
双轴倾角传感器(Dual-axisInclinometer)是一种用于测量坡度和倾斜测量器,它是一种利用加速度传感器(accelerometer),由X、Y轴上的一组加速度传感器组成,可以检测X、Y轴方向上的倾斜倾角。
双轴倾角传感器可以在两个不同方向上测量倾斜角度,常用于地质勘探、航空运输、海洋运输、军事航空、汽车和船检测等应用场合。
原理:
双轴倾角传感器采用加速度传感器,它利用加速度测量X、Y轴方向上的倾斜倾角。
加速度传感器可以相对计算得到X轴和Y轴上的倾斜倾角,然后根据这些数据可以确定物体倾斜的状态。
双轴倾角传感器的优势:
1、准确性:双轴倾角传感器由X、Y轴上的一组加速度传感器组成,它们的测量准确度较高,可以满足高精度应用的要求。
2、灵敏性:双轴倾角传感器在测量倾斜角度时,数据收集速度更快,精度也更高。
3、稳定性:双轴倾角传感器结构紧凑,在惯性、温度和外界干扰方面的稳定性较强。
4、易于维护:双轴倾角传感器的维护和维修方法简单,而且它不需要拆卸和更换零件,可以减少维护成本。
- 1 -。
双轴倾角传感器原理

双轴倾角传感器原理
双轴倾角传感器是一种用于测量物体在平面内的倾斜角度的设备。
其原理基于两个轴线相互垂直,分别测量物体在水平和垂直方向上的倾斜角度。
这种传感器通常由两个加速度计组成,一个测量水平方向上的加速度,另一个则测量垂直方向上的加速度。
在使用双轴倾角传感器时,需要将其安装在需要测量的物体上,并通过电路将其与计算机或其他设备连接起来。
当物体发生倾斜时,传感器会检测到加速度变化,并将数据发送至计算机进行处理。
通过对这些数据进行分析和处理,便可以得出物体在平面内的倾斜角度。
双轴倾角传感器广泛应用于各种领域,如建筑、机械、航空航天等。
例如,在建筑领域中,它可以用于监测建筑物的地基沉降情况、墙壁和屋顶的变形情况等;而在机械领域中,则可以用于监测机器运行时的振动情况、工件加工时的精度等。
总之,双轴倾角传感器是一种非常实用的测量设备,其原理简单而有效,应用范围广泛。
随着科技的不断发展,相信它的应用将会越来越广泛,为各行各业带来更多便利和效益。
基于温度补偿倾角传感器的双轴稳定平台设计
基于温度补偿倾角传感器的双轴稳定平台设计黄新吉【摘要】针对高精度舰载光瞄设备隔离扰动及高稳定跟踪精度视轴的要求,研究一种基于反方向运动抵消舰艇摇摆运动的双轴机械稳定平台.采用MEMS传感器实现倾角测量,采用直流电机实现平台稳定.通过实验方法,测出MEMS传感器的温度特性,再采用分段线性插值补偿模式,在-40 ~+100℃范围内提高传感器的精度.采用无超调控制技术实现直流电机快速响应和平稳运动.利用改变电枢电压的方法,可以实现对电机堵转转矩的控制,从而实现带负载的角度位置控制.实验结果表明,双轴稳定平台的最大角加速度为57°/s2,稳定平台指向复示精度达到0.1 °.【期刊名称】《测控技术》【年(卷),期】2019(038)006【总页数】4页(P137-140)【关键词】MEMS加速度传感器;稳定平台;无超调控制技术;Matlab【作者】黄新吉【作者单位】连云港杰瑞电子有限公司,江苏连云港222006【正文语种】中文【中图分类】TP277舰艇在风浪作用下出现摇摆状态,造成舰载设备如光电、红外的视轴晃动,严重影响光电设备对目标的跟踪测量,无法发挥其跟踪目标的作用。
为准确跟踪目标,减小载体运动带来的扰动误差,需要设计一种稳定系统将舰载设备与船体扰动相隔离,消除舰艇摇摆对舰载雷达瞄准目标的影响。
目前稳定平台主要有两种方法[1]:一种是采用机械稳定方式,用反方向摇摆克服舰艇的纵摇和横摇,为设备提供近似平稳的平台,这种方法对舰载设备和系统无特殊的要求,因此使用方便;另一种方法是通过对舰艇纵摇和横摇数据的测量,用软件对舰载设备捕捉的信号进行补偿,达到稳定的效果,这种方法通常由于受设备的视场限制,补偿的角度范围较小[2]。
本文研究基于反方向运动抵消舰艇摇摆运动的机械稳定平台技术。
根据船上的导航设备,如平台罗经或方位水平仪等,提供舰艇摇摆角信号,建造一个稳定平台隔离船舶的摇摆。
即载机姿态变化后,首先带动平台发生姿态变化,陀螺感受到这种变化后,输出控制设备的视轴相对于惯性空间的偏转信号,经放大处理,驱动力矩电机产生抵消舰载姿态变化的运动,即隔离载机姿态变化。
双轴倾角传感器在钻井工具姿态检测中的应用

双轴倾角传感器在钻井工具姿态检测中的应用摘要:通过对倾角传感器工作原理的分析及钻井工具工作装置运动的研究,阐述了怎样利用双轴倾角传感器完成对钻井工具工作装置的姿态定位问题,为实现对钻井工具的智能化操作提供了前提条件。
关键词:钻井工具倾角传感器工作姿态检测Abstract On the bases of analysing of the working principle of inclinometer and research of the motion of the working unit of Drilling tool,this article presented a way of how to measure the gesture and position of Drilling tool’s working unit using the dual-axis inclinometer,which provide the premise conditions to realize the intelligence opration of drilling tool.Key words Drilling tool inclinometer working gesture measurement0、引言钻井施工中地下钻具的工作状态信息是由地下发射探头测量并发送到地面接收装置的。
地下发射探头主要完成井斜角、相对工具面角、温度、电量及压力等参数的测量,并将测得的数据进行处理、发送到地面接收器。
本文从钻井工具测量参数出发,对井斜角、相对工具面角进行研究,并结合钻井工具的测量特点,提出了设计方案。
1、倾角传感器测量原理及数据传输在本设计中,倾角测量采用VTI公司的SCA100T芯片来完成。
SCA100T是芬兰VTI公司生产的一款低成本、低功耗、功能完善的双轴倾角传感器,其重量轻,测量范围为1g。
SCA100T双轴倾角传感器的量程为90°,其内置温度传感器,长期稳定性能指标优于0.02°[1]。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
格平行, 用以测 量陀 螺敏 感轴 相对 水平 面的 倾角 。 另一 个敏感轴 (y 轴 )在水 平面内 与陀 螺敏感 轴垂 直, 用以 测量 基座平面绕陀螺敏感轴的倾角 。
若寻北仪架设于地球上某一点 O 处, 其经度为 , 纬度 为 ! 。地理坐标系 OXn YnZn, 其方向 分别为东、北、天; 载体 坐标系 X bYbZb 分别为载 体首 尾线水 平面 及水 平 面法 线方 向, 其中, 载体纵轴与 OYb 轴重合, 陀螺轴与 OX b 与之重合。 设载体的方位角、横滚角 和俯仰角分别为 ∀, 和 (逆时针 为正 )。地理坐标 系 X n YnZn 到载 体坐 标系 X bYbZb 的 转换 矩阵为 [ 4]
为了检测加速度计信号的微小变化, 提高 A /D 转换精
度, 需要对信号进行 放大。转 换后的电 压信号 接入 精密滤
波放大电路, 实 现低 通滤 波 [ 8, 9] 。滤波 后的 电压 信号 还必
须经过限幅和调理环节转换成与 AD 采集芯片输 入兼容的
电压信号才能接入 AD 的信号输入 端。采集系统 的流程如
cos 0 - sin 1
0
0
cos ∀ sin ∀ 0
Cbn =
0
s in
10 0 cos
0 cos sin 0 - sin cos
- sin ∀ cos ∀ 0
0
01
cos cos ∀- sin sin sin ∀ cos sin ∀+ sin sin cos ∀ - sin cos
=
- cos sin ∀
( 2)
仅考虑加速度计偏值时, 双轴加速度计的输出分别为
A x = g cos sin + gx0, A y = - g s in + gy0 .
( 3)
式中 g 为重力加速度, gx0和 gy0为加 速度计的零偏。
采集加速度计在相差 180 两位置的输出 值 A 1x, A 1y, A 2x
和 A 2y, 解算 出 和 为 [ 7]
摘 要: 光纤陀螺 ( FOG )寻北仪是利用 FOG 在相对地球静止 时感测 到的地球 自转角 速率在 光轴上 的分 量特性而设计的寻北系统。固定陀螺的基座不水平 时, 对寻 北精度会 产生较大的 影响。为了 检测基 座平
面的姿态角, 并对 陀螺的输出值进行补偿, 研制了高精度的双轴倾角传 感器。该 倾角传感器采用双轴石英 挠性加速度计作为检测元件, 通过采样加速度 计在相 差 180 的 2 个方向 上的输 出值, 精确地 解算出 基座
本倾角传 感器是 为了检测 固定 FOG 的基 座的姿 态角 并补 偿陀螺的输出值而设 计的, 因此在 结构上 与寻北 系统 是一个整体, 并不是一个 独立的 部件。 FOG 寻 北仪采 用二 位置 法测量原理, 即通过采样 陀螺在 相差 180 的 2个 方向 上的输出值, 解算出陀螺的敏感轴与真北方向的夹角, 工作 原理 如图 1所示。
便于后续电路处理, 需要进 行 I/V 转 换把电流 信号 转换成
电压信号。
加速度计的标度因数 Ig= 1 # 0. 2mA /gn, 匹配 电阻为 50# 。设计的测角范 围为 # 15 , 则加 速度 计输 出的 电压
幅值为 V = 1 ∀ 50 ∀ 10- 3 ∀ sin 15 = 12. 94 ∀ 10- 3 V。
平面的姿态角, 并 消除了加速度计偏值的影响。系统简单, 容易实现, 且达到了较高的测角精度。 关键词: 光纤陀螺寻北仪; 加速度计; 倾角传感器; A /D 转换
中图分类号: U 666. 12
文献标识码: A
文章编号: 1000 9787( 2009) 12 0086 03
Design and realization of dual ax is T ilt angle sensor
cos cos ∀
s in
.
( 1)
sin cos ∀+ co s sin sin ∀ sin sin ∀- cos sin cos ∀ cos cos
在地理坐标系 X n YnZn 中 地球重 力加 速度为 [ 0 0
- g ]T , 则在载体坐标系 X b YbZ b 中各轴的重力分量为
[A x Ay A z ] T = Cbn ∀ [ 0 0 - g ] T .
实现二位 置法测 量的关键 部件是 精密机 械转台 , FOG
收稿日期: 2009 感器的设计与实现
87
图 1 二位置寻北方案原理图 F ig 1 D iagram o f principle of two positions north seeking 和双轴加速度计固定在 转台上, FOG 的敏感 轴平 行于 基座 平面。双轴加速度计的一个敏感轴 ( x 轴 )与陀螺敏感轴严
= arcs inA 1y - A 2y, = arcsin 2g
A 1x - A 2x
.
4g2 - (A 1y - A 2y ) 2
( 4)
在上面的处理中消除 了加速 度计的 零偏, 极大 地降低
了对加速度计精度的要求。
2 倾角传感器的设计与实现
2. 1 硬件电路设计 双轴石英挠性加速度 计的两 路输出 为电流 信号, 为了
JIANG Q ing x ian1, 2, MA X iao hu i2, CH EN X iao b i2, WANG H ua2
( 1. S choo l of M echan ica l Engineering, X i! an J iao tong Un iversity, X i! an 710049, Ch ina;
86
传感器与微系统 ( T ransducer andM icro system T echno log ies)
2009年 第 28卷 第 12期
双轴倾角传感器的设计与实现
蒋庆仙 1, 2, 马小辉 2, 陈晓璧 2, 王 华 2
( 1. 西安交通大学 机械工程学院, 陕西 西安 710049; 2. 西安测绘研究所, 陕西 西安 710054)
2. X i! an R esearch Institu te of Surveying and M apping, X i! an 710054, Ch ina)
Ab stract: F ibe r optic gyroscope ( FOG ) no rth seeker is a de term in ing no rth sy stem tha t utilizes the ho rizontal com ponents o f the ea rth rotation rate sensed by FOG w hen FOG is at rest re lative to the earth. T he ang les be tw een the base and the hor izonta l p late have great effect on the or ientation accuracy. In order to de tect the attitude ang les ( ro ll ang le and p itch ang le) o f the carr ier at the sam e tim e and com pensate the outputs o f the FOG, a high precise ang le senso r is developed, wh ich adopts doub le ax is quartz flex ible acce le rome ter as de tecting sensor. By m aking use o f the outputs o f the accelerom eter at two directionsw ith a phase difference o f 180 , the tilt ang les between the base and the hor izonta l plate can be accurate ly ca lcu lated and the constant offsets of the acce le rome ter a re e lim inated. T he tilt ang le sensor is easy to imp lem ent and has high m easur ing accuracy. K ey w ords: FOG no rth seeker; acce lerom ete r; tilt ang le senso r; A /D conve rs ion
地球以恒定的 自转角 速率 绕地 轴旋转。 利用 FOG 测 量地球自转角 速率 的水 平分 量可 以获 得被 测点 的北 向信 息, 经过解算得到 FOG 敏感轴轴与真北方向 的夹角。研究
表明: 安装陀螺的基座平面与水平面存在较大倾角时, 寻北 精度会受到较 大的影响。基座平面绕垂直于陀螺轴的倾角 会直 接引起一个同样量级 的方位 角测量 误差, 从而在 较大 程度 上影响寻北精度; 基座平面 绕陀螺 轴的倾 角对方 位角 测量 的影响相对较小。为了 提高寻 北精度, 必须 测量 基座 平面 的姿态角, 并对陀螺输出值进行补偿 [ 4, 5]。 1 倾角测量原理
2. 2 数据采集系统软件设计 系统采用 DSP对加速度计进 行数据 采集, 对其采 取查
询的 方式启动数据采集 作业, 如图 3所 示。系统 上电 复位 后, 首先对 AD 7705进行 初始 化, 然后, 设 置循 环 定时 采样 周期。当软件定时器时 间到时, 对 flag 置 1, 开 始采集 加速 度计的数据。对 AD 7705发 送采 样转 换信 号, 待 两路 模拟 信号 依次转换 完成 后存 储数 据。完成 一次 数 据采 集工 作 后, 同时, 将两 路加速度计数据进行处理、存储, 并等待下一 个数 据采 集周 期。 由 于 AD7705 转 换 速 率 可 达 100 kSPS (总转换时间 10 ps) , 而 本系 统 A /D 转 换所 需的 采样 频率 不高, 两路 A /D 采用分时转换的方式完 全可以满足 系统实