高精度双轴倾角传感器 SCA100T(精选.)
传感器SCA100T中文说明书

双轴倾角测量(X 轴、Y 轴) 测量范围 ±30° SCA100T-D01
±90° SCA100T-D02 分辨率 0.0025°(10 Hz BW, 模拟
输出) 传感元件的过阻尼的频率响应控
制(-3dB 18Hz) 稳健设计,高冲击性(20000g) 全温区、长期保持高稳定性 5V 直流供电
1. 电气特性
SCA100T 产品系列包括两个型号,SCA100T-D01 和 SCA100T-D02,区别在于其测量范 围,其他技术指标都是一样的,下表列出的是 SCA100T 具体技术指标。
1.1 绝对的最大等级
VDD 电压 I/O 引脚电压 保存温度 操作温度 机械冲击
-0.3V 至+5.5V -0.3V 至(VDD + 0.3V) -55°C 至+125°C -40°C 至+125°C 从 1 米高处跌落到混凝土表面(20000g),供电或无动力
<0.014
1
1.3 电气特性
参数 输入电压 消耗电流 操作温度 模拟量稳定输出负载 模拟端电容 启动延迟
条件
Vdd=5V;无负载
3. 应用信息.........................................................................................................................................13 3.1 推荐原理图和印刷图..........................................................................................................13 3.2 推荐 PCB 库元件封装尺寸 ...............................................................................................14
高速铁路轨道不平顺的激光测量方法研究

DOI:10.16661/ki.1672-3791.2307-5042-4508高速铁路轨道不平顺的激光测量方法研究(湖南铁路科技职业技术学院 湖南株洲 412006)摘要:高平顺性的铁路轨道是高速列车平稳、安全运行的根本保证。
铁路轨道的不平顺会导致机车车辆产生振动或者破坏,而轨道的不平顺性也是线路设计和评估的重要依据。
随着高速铁路的快速发展和列车速度的不断提高,轨道几何状态参数检测的精度和效率也需要提升。
在传统的工务维修中,铁路轨道的平顺性状态检测主要采用“相对测量”法,与全站仪等设备配合使用,但该方法检测精度不高、检测效率低,易受外界天气影响。
为保证机车车辆的安全行驶,铁路轨道需符合高平顺性要求。
利用激光准直原理,通过激光长弦发射器与数字接收光靶配合测量,可直接推算轨道的长波不平顺,有效扩大基准弦的长度。
这种方法能直接测量轨道的平顺性状态,提高检测精度与效率。
关键词:高速铁路 激光检测 长波不平顺 轨道检测中图分类号:U216.3文献标识码:A 文章编号:1672-3791(2023)23-0087-05 Research on the Laser Measurement Method of the TrackIrregularity of High-Speed RailwaysJIA Yan(Hunan Vocational College of Railway Technology, Zhuzhou, Hunan Province, 412006 China)Abstract:Railway tracks with high regularity are the foundamental guarantee for the smooth and safe operation ofhigh-speed trains. The irregularity of railway tracks will lead to the vibration or damage of railway vehicles, and theirregularity of tracks is also an important basis for the design and evaluation of the line. With the rapid developmentof the high-speed railway and the continuous improvement of the train speed, higher requirements for the accuracyand efficiency of the geometric state parameter detection of tracks are put forward. In traditional track maintenance,the "relative measurement" method is mainly used to detect the regularity of railway tracks, which is used in con‐junction with total stations and other equipment, but the detection accuracy of this method is not high with lowdetection efficiency, and it is susceptible to external weather. In order to ensure the safe operation of railway ve‐hicles, railway tracks need to meet the requirements of high regularity. In this study, by using the principle of laseralignment, the long-wave irregularity of tracks can be directly calculated through the coordinated measurement ofthe laser long-string transmitter and the digital receiving light target, and the length of the reference string can beeffectively expanded. This method can directly measure the regularity status of tracks and improve detection accu‐racy and efficiency.Key Words: High-speed railway; Laser detection; Long-wave irregularity; Track detection基金项目:2020年湖南省教育厅科学研究项目(项目编号:20C1228);2023年湖南铁路科技职业技术学院院级课题(项目编号:HNTKY-KT-2023-3)。
SCA100T中文资料
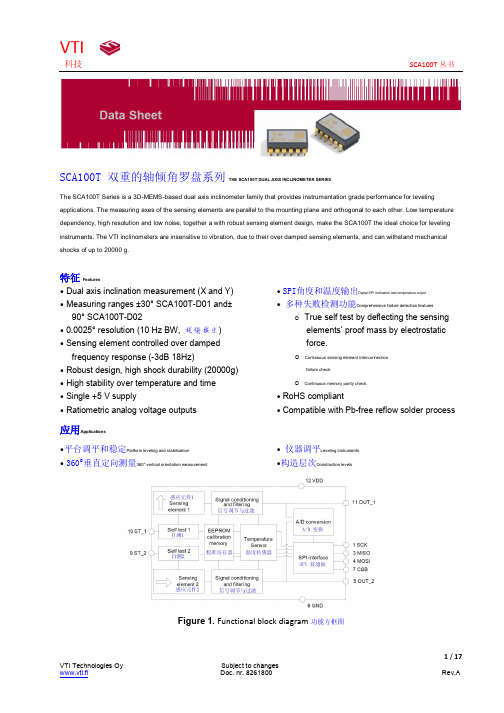
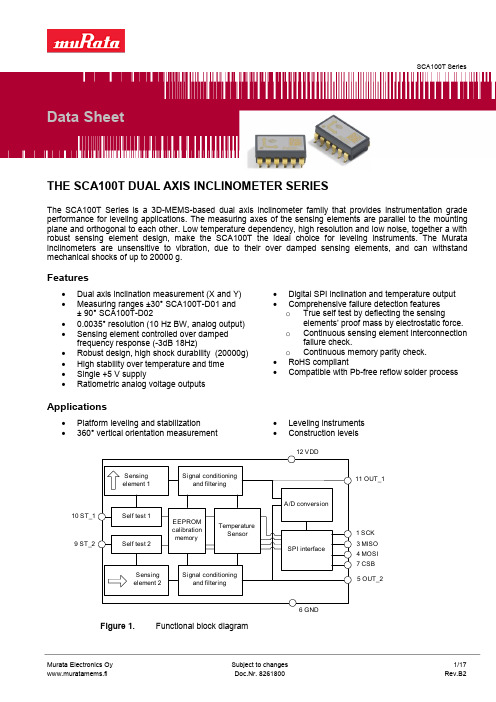
SCA100T 双重的轴倾角罗盘系列THE SCA100T DUAL AXIS INCLINOMETER SERIESThe SCA100T Series is a 3D-MEMS-based dual axis inclinometer family that provides instrumentation grade performance for leveling applications. The measuring axes of the sensing elements are parallel to the mounting plane and orthogonal to each other. Low temperature dependency, high resolution and low noise, together a with robust sensing element design, make the SCA100T the ideal choice for leveling instruments. The VTI inclinometers are insensitive to vibration, due to their over damped sensing elements, and can withstand mechanical shocks of up to 20000 g.特征 Features• Dual axis inclination measurement (X and Y)• Measuring ranges ±30° SCA100T-D01 and± 90° SCA100T-D02• 0.0025° resolution (10 Hz BW, 模拟输出)• Sensing element controlled over dampedfrequency response (-3dB 18Hz)• Robust design, high shock durability (20000g)• High stability over temperature and time• Single +5 V supply• Ratiometric analog voltage outputs•SPI角度和温度输出Digital SPI inclination and temperature output•多种失败检测功能Comprehensive failure detection featureso True self test by deflecting the sensingelements’ proof mass by electrostatic force.o Continuous sensing element interconnectionfailure check.o Continuous memory parity check.• RoHS compliant• Compatible with Pb-free reflow solder process应用Applications•平台调平和稳定Platform leveling and stabilization•360°垂直定向测量360° vertical orientation measurement•仪器调平Leveling instruments•构造层次Construction levelsFigure 1. Functional block diagram功能方框图电器特性Electrical SpecificationsThe SCA100T product family comprises two versions, the SCA100T-D01 and theSCA100T-D02 that differ in measurement range. The product version specific performance specifications are listed in the table SCA100T performance characteristics below. All other specifications are common with both versions.Vdd=5.00V and ambient temperature unless otherwise specified.绝对的最大等级Absolute Maximum RatingsSupply voltage (VDD) VDD电压-0.3V to+5.5VVoltage at input / output pins I/O引脚电压-0.3V to (VDD + 0.3V)Storage temperature 保存温度-55°C to +125°COperating temperature 操作温度-40°C to +125°CMechanical shock 机械冲击Drop from 1 meter onto a concrete surface (20000g). Powered or non-powered 特征参数Performance CharacteristicsParameter Condition SCA100T-D01SCA100T-D02Units测量范围Measuring range标称Nominal±30±0.5±90±1.0°g响应频率(带宽)Frequency response–3dB LP(18-288-28Hz 0g偏移量模拟输出Offset (Output at 0g)RatiometricoutputVdd/2 Vdd/2V 偏移量校准误差Offset calibration error±0.11±0.23°0g偏移量数字输出Offset Digital Output1024 1024 LSB模拟量输出灵敏度Sensitivity在0--1°时(2470235V/gmV/°灵敏度校准误差Sensitivity calibration error±0.5 ±0.5%数字量输出灵敏度Sensitivity Digital Output1638 819LSB / g Offset temperature dependency -25…85° C ±0.008 ±0.008 °/°C温度引起的角度偏移(typical)-40…125°C (max)±0.86 ±0.86°Sensitivity temperature dependency 温度引起的灵敏度偏移-25...85° C(typical)-40…125°C (max)±0.014-2.5...+1±0.014-2.5...+1%/°C%典型的非直线性Typical non-linearity满量程Measuring range±0.11 ±0.57°数字输出协议Digital output resolution在0--1°时(2110.035110.07Bits° /LSB输出噪音密度Output noise density From DC...100Hz 0.0008 0.0008°/模拟量输出分辨率Analog output resolution Bandwidth 10 Hz (3 0.0025 0.0025 °公制误差比率Ratiometric error Vdd =4.75...5.25V±1±1%正交敏感Cross-axis sensitivity Max 4 4 %长期稳定性Long term Stability(4<0.014<0.014°Note 1. 响应频率由内部敏感元件的气阻尼决定The frequency response is determined by the sensing element’s internal gas damping.Note 2. The angle output has SIN curve relationship to voltage output refer to paragraph Error! Referencesource not found.Note 3. Resolution = Noise density * √(bandwidth)Note 4. Power continuously connected (@ 23°C).电气特性Electrical CharacteristicsParameter参数Condition条件Min.Typ Max.Units Supply voltage Vdd 输入电压 4.75 5.0 5.25 V Current consumption消耗电流Vdd = 5 V; 无负载 4 5 mA Operating temperature操作温度-40 +125 °CAnalog resistive output load 模拟量稳定输出负载Vout to Vdd or GND 10KOhmK欧姆Analog capacitive output load模拟端电容Vout to Vdd or GND20 nF Start-up delay启动延迟Reset and parity check 10 ms SPI接口的直流特性SPI Interface DC CharacteristicsParameter Conditions Symbol Min Typ Max UnitInput terminal CSB CSB输入端Pull up current上拉电流V IN = 0 V I PU1322 35 µAInput high voltage输入高V IH 4 Vdd+0.3 V 电平Input low voltage输入低电V IL-0.3 1 V 平Hysteresis滞后现象V HYST 0.23*VdVdInput capacitance输入电容C IN2pFInput terminal MOSI, SCKPull down current 拉低电流V IN = 5 V I PD9 17 29µA Input high voltage输入高电V IH4Vdd+0.3 V 平V IL -0.3 1V Input low voltage输入低电平Hysteresis滞后作用V HYST 0.23*VdVdInput capacitance输入电容C IN2pFOutput terminal MISOOutput high voltage输出高电I > -1mA V OH Vdd-0.5V 平Output low voltage输出低电I < 1 mA V OL 0.5 V 平Tristate leakage三态泄露0 < V MISO <Vdd I LEAK 5 100 pA SPI接口AC特性SPI Interface AC CharacteristicsParameter Condition Min.Typ.Max.Units Output load 输出负荷@500kHz 1 nF SPI clock frequency SPI 时钟频率500kHz Internal A/D conversion time内部A/D转换时150µs 间Data transfer time数据移动时间@500kHz 38 µs SPI接口时序SPI Interface Timing SpecificationsParameter Conditions Symbol Min.Max.UnitTerminal CSB, SCK输入端CSB、SCKT LS1120ns Time from CSB (10%)to SCK (90%)从CSB计时(10%)到SCK(90%)Time from SCK (10%)to CSB (90%)从SCK计时(10%)到CSB(90%)T LS2120ns Terminal SCK SCK端SCK low time SCK低电平时间Load capacitanceat MISO < 2 nF负荷容量MISO<2 nFT CL1µsSCK high time SCK高电平时间Load capacitanceat MISO < 2 nFT CH1µsTerminal MOSI, SCKTime from changing MOSI(10%, 90%) to SCK(90%).Data setup time时间从变更MOSI(10%,90%) 到 SCK(90%).数据装备时间T SET30nsTime from SCK (90%) to changing MOSI(10%,90%).Data hold time计时从SCK(90%)到变更 MOSI。
高精度双轴倾角传感器 SCA100T

高精度双轴倾角传感器SCA100T
SCA100T是基于3D-MEMS技术的双轴倾角传感器系列,具有仪表级性能,用于水平垂直测量。
其传感单元的测轴分别与水平和垂直面平行。
具有低的温度影响,高分辨率,低噪声,抗干扰设计,是水平测量的理想选择。
VTI公司的倾角传感器有超阻尼敏感单元,故可承受高达20000g的机械冲击。
*(MEMS是微机电系统[Micro-Electro-Mechanical Systems]的缩写。
MEMS主要包括微型机构、微型传感器、微型执行器和相应的处理电路等几部分,它是在融合多种微细加工技术,并应用现代信息技术的最新成果的基础上发展起来的高科技前沿学科。
)
技术规格。
电动车跷跷板 新2
2007年全国大学生电子设计竞赛F题电动车跷跷板设计报告摘要本系统是以单片机AT89S52为核心,利用红外光电传感器,角度传感器以及他们的外围电路组成的测控系统,实现对在跷跷板上行驶的小车的运动状态的实时跟踪监测,由单片机对电动小车的位姿状态做出及时正确的反应,并输出相应的控制指令,经过驱动模块后由执行模块完成小车的爬行、减速、找出平衡位置并保持等一系列要求完成的整套动作。
关键词:步进电机;电动小汽车;控制AbstractThe system is at the core MCU AT89S52, using infrared photoelectric sensor, angle sensors and their external circuit composed of measurement and control system, in the seesaw of a car traveling on the state of real-time campaign tracking, MCU right by the electric trolley in state funding to timely correct response output control and the corresponding instructions, the driver module after module completed by the Executive car crawling, slow down, find balance and maintain the position, and a series of actions required to complete the package.Keywords: step motor; electronic automobile; control一、系统方案论证本系统采用的是AT89S52实现电动小车的寻迹、爬行、找平衡、返回,并达到时间上的精确控制与显示。
车体双轴倾角传感器的标定

车体双轴倾角传感器的标定贾培刚;张铭【摘要】In order to eliminate the parallelism error between sensitive axis of sensing unit and slewing axis of the calibration platform caused by machining error of reference plane, welding error of electronic components, alignment error of PCB and lack of standardization in calibration process, the sources of calibration errors are analyzed and the mathematical model is established based on the measurement principle of MEMS inclinometer. The measured data is simulated according to this error model, an effective real-time correcting calibration method is finally put forward by analyzing simulation result, which can supplement the conventional approaches. Compared the data before and after taking this method, test results show that error of data from inclinometer is decreased by more than one order of magnitude. The proposed method can improve calibration accuracy of dual-axis inclinometer obviously.%为了消除由双轴倾角传感器基准面加工误差、电子元器件的焊接误差、电路板的安装误差和标定过程不规范所带来的传感单元敏感轴与标定平台的旋转轴之间的平行误差,在MEMS倾角传感器的测量原理基础上,分析了双轴倾角传感器标定过程中误差的来源并建立了标定误差的数学模型.根据该误差模型对测量数据进行了模拟,分析模拟结果并提出了有效的软件实时修正的标定方法,弥补了传统标定方法的不足.对采取该修正方法前后的数据进行比较,实验结果表明传感器输出数据误差减小了1个数量级以上.文中方法可明显提高双轴倾角传感器的标定精度.【期刊名称】《西安工业大学学报》【年(卷),期】2012(032)012【总页数】4页(P1000-1003)【关键词】倾角传感器;测量误差;实时修正;标定【作者】贾培刚;张铭【作者单位】西安工业大学机电工程学院,西安710021;西安工业大学机电工程学院,西安710021【正文语种】中文【中图分类】TP212.9射击精度是自行火炮最重要的性能指标,直接影响着对目标的射击效率.车体姿态的精确测量则是保证射击精度的基础.传统使用的机械式姿态测量仪体积大、响应速度慢、测量精度低,远远不能满足现代火炮所要求的快速和精确打击的要求.基于光学原理和图像处理技术的姿态测量仪精度较高,但是价格昂贵,且需要进行大量的复杂运算,一般需要计算机辅助完成[1],不符合低成本、低功耗、微型化的车载性要求.本文采用两个MEMS倾角传感器垂直组合设计的双轴倾角传感器体积小、响应速度20ms,精度高,抗干扰能力强,完全可以满足车体测量的要求. 本文在对该传感器标定中却发现垂直组合而成的双轴传感器存在垂直关系难保证、敏感轴与标定轴难平行的难题.Acko B和David H P等人均采用正弦板的方法来解决这些难题[2-3],效果很好,但高精度的标定装置价格昂贵,标定过程繁琐,计算量大.结合前人研究成果,本文旨在探索一种简单、有效的方法对双轴倾角传感器进行标定,以消除或减小标定过程存在的误差,使倾角传感器的测量结果更加精确,进而提高射击精度.1 测量原理本文所用双轴倾角传感器是由两个单轴SCA103T高精度传感器垂直组合并配以滤波模块、信号调理模块和中央处理器及信号传输模块而成如图1所示.图1 SCA103T倾角传感器结构Fig.1 Structure of SCA103Tinclinometer单轴SCA103T系列是以单晶硅材料制造的高精度单轴倾角传感器,综合精度小于0.02°,经组合设计后的双轴测量系统输出精度不大于0.03°,仍优于该公司综合精度小于0.1°的高精度双轴倾角传感器SCA100T.SCA103T传感器由三层硅片构成[4],形成立体结构,当倾斜或者有加速度的时候,中间质量片会倾斜向某一侧,从而两侧的电容由一样变成不一样.测试片两边形成电容,传感器灵敏度高,两极之间由玻璃构成绝缘,抗震能力达到20 000g.2 标定误差的来源与数学模型经过对该传感器系统结构和标定过程的分析,得到影响其标定精度的主要误差有电子元器件的焊接误差、电路板的安装误差以及壳体基准靠面的机械加工误差.三种主要误差的存在使得双轴传感器的垂直关系很难保证.然而,标定时可以很容易的通过在有一定倾角的标定平台上旋转传感器的z轴(与x、y平面垂直的轴),直至x轴输出为零[5],实现x轴与标定平台的旋转轴线平行.如图2所示,若传感器x轴输出不为零,则可通过在倾斜的平台上旋转传感器虚拟z轴使传感器x轴输出最小值θx,此时对x轴输出值进行修正,使x轴输出为零(标零点),但这只能保证传感器x轴与R方向平行.由于以上误差的存在,在标定平台面内传感器真实y轴(①方向)仍会与R的垂直方向存在夹角αy,并假设传感器y轴输出的真实倾角为γy,标定平台在y轴方向的标定倾角为βy,由图可知三个夹角的几何关系为图2 标定误差示意图Fig.2 The schematic chart of calibration error图2 中XYZ为传感器坐标轴,Z为虚拟轴,便于旋转说明,①②③为传感器Y轴在平台面内相对于X轴的布置方向,②是垂直与X轴位置.④传感器Y轴相对平台面翘起的方向;θy为翘起角度;⑤传感器X轴相对平台面翘起的方向;θx为翘起角度;αy为①方向与X轴垂直方向的夹角,βy为标定平台Y向相对于水平面的倾角.γy为传感器y向输出相对水平面的倾角.R为标定平台旋转轴线方向.当标定平台给定角度βy,y轴传感方向与标定方向的夹角为αy时,可求出y轴传感方向的真实倾角γy,比较βy与γy的大小,耦合误差是δy=βyγy,即同样,把传感器旋转90度,使y轴与标定平台旋转轴线平行时,可得到x轴的耦合误差方程以y轴的耦合误差方程为例,δy对标定角度βy和传感方向与标定方向夹角αy偏导方程为3 数据模拟分析与解决方案3.1 数据模拟与分析根据标定过程实际存在耦合误差的现象,假设y轴输出的真实倾角为γy,标定平台在y轴方向的标定倾角为βy的变化范围为-12°~12°,步距为1.5°;y轴与标定平台旋转轴线的垂直方向存在夹角αy 的变化范围为-4°~4°,步距为0.5°.由式(3)可得耦合误差δy随αy和βy耦合角的变化曲线如图3所示,即可判断δy随y轴测量角度的增加而增大.由图4可观察标定倾角βy和y轴与标定平台旋转轴线的垂直方向夹角αy各自对误差角δy的影响均为线性,即当αy固定后,δy随βy的变化而线性变化.由于传感器本身误差,电路误差,环境误差的存在不可避免,只有尽可能的减小标定误差,才能使整个测量系统更加的精确,所以把标定误差δy为零定为目标,令式(5)和式(6)两式等于零,可得δy=0时,δy取得极值0,与图3所示吻合.在不改变硬件的前提下,通过数据修正结果达到的目标,并非y轴与标定平台旋转轴线的垂直方向真正物理意义上的平行.图3 耦合误差δy随αy和βy综合作用的变化曲线Fig.3 The curve of coupling errorδywith combined effects ofαyandβy图4 βy和αy各自对耦合误差δy的影响Fig.4 Respective influenceofβyorαyon coupling error3.2 解决方案通过以上对标定误差的分析和数据模拟,本文采用软件修正的方法对标定结果进行修正,修正的步骤为① 标零点:通过在倾斜的平台上旋转传感器虚拟z轴使传感器x轴输出最小值θx,此时对x轴输出值进行修正,使x轴输出为零,实现x轴与标定平台的旋转轴线R 方向平行,从而为求出①方向与x轴垂直方向的夹角αy,并进行数据补偿做基础.② 忽略图5所示标定平台的系统误差5.56×10-4°(2 s),βy 为人为定值,γy 为相对于βy 的随机变量;由式(1)得式(7)为非线性方程.综合以上条件,采用后平均法[6-7]对αy进行估计,其中:n为测试数据组数③ 把αy存入存储单元,用其对输出的γ′y数据进行实时的修正,修正方程由式(1)得图5 标定平台Fig.5 Calibration platform4 实验验证按解决方案①进行调整,使得传感器x轴与标定平台的旋转轴线平行,调整标定平台从-7.5°~+7.5°,修正前传感器输出角度数据如表1中的γy所示.表1 修正前数据Tab.1 Data before correction标定角度βy/(°)-7.5 -6 -3 993 0修正后角度γ'y/(°)-7.501 3 -5.999 6 -3.000 3标定角度βy/(°)0 3 6 7.5修正前角度γy/(°) 0 2.992 5.986 7.修正前角度γy/(°)-7.483 0 -5.985 0 -2.499 3 481修正后角度γ′y/(°) 0 2.999 3 6.000 6 7.② 由于βy=0在式(7)中无意义,此处舍弃,不参与估计.零位第一步已标定,这里只做检查.根据式(8)得出αy的估计值¯α=3.9940.③ 存储后,利用式(9)对表1中的传感器输出的修正前角度γy进行修正,结果如表1修正后角度γ′y 所示.由修正前后传感器输出数据的对比可以看出,对αy采取后平均法估计简单可取,修正前数据最大误差1.9×10-2°,修正后数据最大误差1.3×10-3°;该方法减小标定误差1个数量级以上,而且修正后数据更加稳定,此方法对X轴的标定也获得同样的效果.5 结论本文通过分析双轴倾角传感器标定误差的来源,建立了标定误差的数学模型,并对该模型进行了数据模拟.结合模拟结果和传感器输出数据特性,提出了软件实时修正的方法对高精度双轴倾角传感器进行标定修正.修正前后传感器输出数据的对比结果表明,该方法可减小双轴倾角传感器的标定误差1个数量级以上,明显提高了工程要求精度小于3.0×10-2°的高精度倾角传感器的标定精度,说明本文提出的标定修正方法简单、有效.【相关文献】[1]马小林.基于图像反馈的角度测量系统集成研究[D].杭州:机械与能源工程学院.2008.MA Xiao-lin.Study on Integration of an Angle Measurement System Based on Image Feedback [D].Hangzhou:Institute of Mechanical and Energy Engineering,2008.(in Chinese)[2] ACKO B.Calibration of Electronic Levels Using a Special Sine Bar[J].Precision Engineering,2005,29(1):48.[3] DAVID H.PARKER,FREDERIC R.SCHWAB,JOHN W.Shelton,TimothyL.Weadon.Calibration and Modeling of a Dual Axis Inclinometer[J].Precision Engineering,2005,29(3):381.[4] VTI TECHNOLOGIES.高精度倾角传感器SCA103T[EB/OL].[2012-05-21].http:///.VTI TECHNOLOGIES.High Precision Angle Sensor SCA103T[EB/OL].[2012-05-21].http://.(in Chinese)[5]粘宝卿,黄衍镇.Accu Star II倾角传感器的调零和定标[J].气象水文海洋仪器,2000,12(2):7.ZHAN Bao-qing,HUANG Yan-zhen.The Zero Setting and Calibration of Tilt Sensor AcuStar II[J].Meteorological Hydrological and Marine Instrument,2000,12(2):7.(in Chinese)[6]陈峰,罗南星.间接测量结果估计的探讨[J].计量技术,1995,38(8):43.CHEN Feng,LUO Nan-xing.Discussion of Estimate to Indirect Measurement Results[J].Measurement Technique,1995,38(8):43.(in Chinese)[7]田社平.间接测量结果估计及其数据处理[J].计量技术,1998,41(5):42.TIAN She-ping.Estimate of Indirect Measurement Results and Its Data Processing[J].Measurement Technique,1998,41(5):42.(in Chinese)。
倾角传感器芯片参数
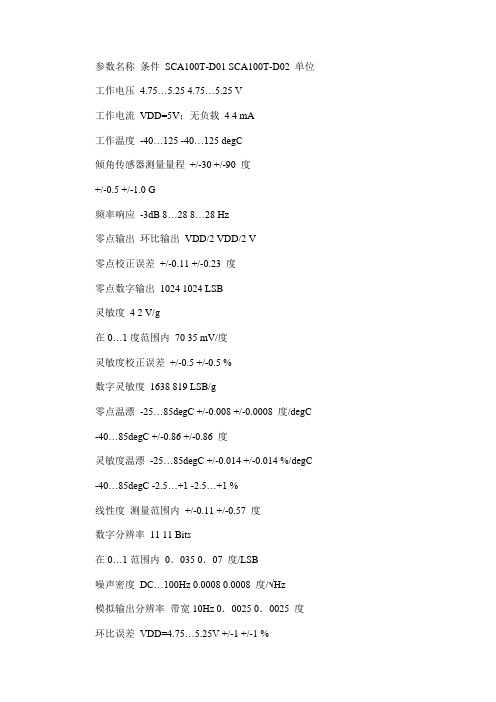
参数名称条件SCA100T-D01 SCA100T-D02 单位工作电压 4.75…5.25 4.75…5.25 V工作电流VDD=5V;无负载 4 4 mA工作温度-40…125 -40…125 degC倾角传感器测量量程+/-30 +/-90 度+/-0.5 +/-1.0 G频率响应-3dB 8…28 8…28 Hz零点输出环比输出VDD/2 VDD/2 V零点校正误差+/-0.11 +/-0.23 度零点数字输出1024 1024 LSB灵敏度 4 2 V/g在0…1度范围内70 35 mV/度灵敏度校正误差+/-0.5 +/-0.5 %数字灵敏度1638 819 LSB/g零点温漂-25…85degC +/-0.008 +/-0.0008 度/degC -40…85degC +/-0.86 +/-0.86 度灵敏度温漂-25…85degC +/-0.014 +/-0.014 %/degC -40…85degC -2.5…+1 -2.5…+1 %线性度测量范围内+/-0.11 +/-0.57 度数字分辨率11 11 Bits在0…1范围内0.035 0.07 度/LSB噪声密度DC…100Hz 0.0008 0.0008 度/√Hz模拟输出分辨率带宽10Hz 0.0025 0.0025 度环比误差VDD=4.75…5.25V +/-1 +/-1 %艾驰商城是国内最专业的MRO工业品网购平台,正品现货、优势价格、迅捷配送,是一站式采购的工业品商城!具有10年工业用品电子商务领域研究,以强大的信息通道建设的优势,以及依托线下贸易交易市场在工业用品行业上游供应链的整合能力,为广大的用户提供了传感器、图尔克传感器、变频器、断路器、继电器、PLC、工控机、仪器仪表、气缸、五金工具、伺服电机、劳保用品等一系列自动化的工控产品。
如需进一步了解图尔克、奥托尼克斯、科瑞、山武、倍加福、邦纳、亚德客、施克等各类传感器的选型,报价,采购,参数,图片,批发信息,请关注艾驰商城/。
角度传感器
其中sens表示一个固定的系数。
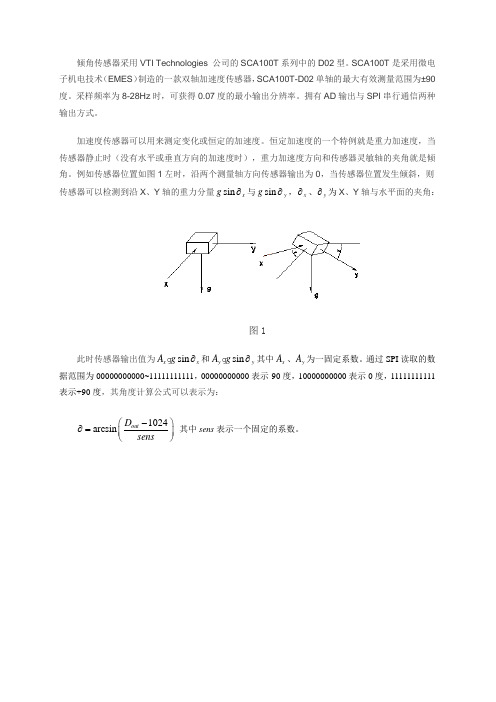
倾角传感器采用VTI Technologies公司的SCA100T系列中的D02型。SCA100T是采用微电子机电技术(EMES)制造的一款双轴加速度传感器,SCA100T-D02单轴的最大有效测量范围为±90度。采样频率为8-28Hz时,可获得0.07度的最小输出分辨率。拥有AD输出与SPI串行通信两种输出方式。
加速度传感器可以用来测定变化或恒定的加速度。恒定加速度的一个特例就是重力加速度,当传感器静止时(没有水平或垂直方向的加速度时),重力加速度方向和传感器灵敏轴的夹角就是倾角。例如传感器位置如图1左时,沿两个测量轴方向传感器输出为0,当传感器位置发生倾斜,则传感器可以检测到沿X、Y轴的重力分量 与 , 、 为X、Y轴与水平面的夹角:
基于单片机的高精度倾角测量系统的设计
基于单片机的高精度倾角测量系统的设计在地质石油勘探、设备安装、道路桥梁建设等工程应用以及机器人控制、坦克和舰船火炮平台控制、飞机姿态控制等系统的自动水平调节中,都需要高精度的倾角测量。
但高精度的倾角,测量设备通常体积较大,成本高,使许多工程应用受到限制。
本文从倾角的高精度测量出发,着重介绍了倾角传感器输出稳定性处理、温度补偿、非线性处理(正弦曲线拟合)、信号调理及其测量电路的特殊处理等。
1 倾角测量系统的硬件设计倾角测量系统硬件部分主要由MEMS 传感器(含双轴倾角传感器和温度传感器)、SOC 电路、数据处理及传输和其他辅助电路等模块组成。
倾角测量系统的组成框图如图1 所示。
1.1 MEMS 倾角传感器接口MEMS 倾角传感器采用芬兰VTI Technologies 公司的SCA100T 系列中的SCA100T-D01,测量范围为±30°。
SCA100T 系列是采用微机电系统(MEMS)技术制造的一款高分辨率双轴倾角传感器。
SCA100T-D01 数字输出分辨率为0.035°/LSB,模拟输出分辨率为0.002 5°。
模拟输出的分辨率大大高于数字输出的分辨率,故本设计采用其模拟输出。
模拟输出将涉及较为复杂的模拟信号处理,如果模拟信号处理不当,系统的分辨率和精度将大打折扣,有时甚至还不如数字输出。
采用合理的模拟信号处理电路是保证系统精度的方法之一。
SCA100T-D01 内置温度传感器,可以通过其自带的SPI 数字接口读取温度值,并在处理器中进行相应的温度补偿。
这是保证系统精度的又一方法。
1.2 阻抗匹配及放大SCA100T-D01 输出阻抗为10 KΩ,为保证MEMS 倾角传感器SCA100T-D01 输出的信号有效地传递,即要求衰减最小,设计中采用了具有高输入阻抗的场效应管型运放TL081 设计了阻抗匹配电路,采用同相输入,以提高输入阻抗。
基于倾角传感器的倾角测量系统设计

基于倾角传感器的倾角测量系统设计引言目前,业内对倾角的测量多是基于MEMS 的加速度传感器,SCA100T 是由芬兰VTI 公司推出,采用三维MEMS 技术开发的一款高精度双轴倾角传感器,可同时测量相对于水平面的倾斜和俯仰角度,具有温度补偿功能。
本文以塔式起重机为应用背景,采用SCA100T 倾角传感器实时采集倾斜信息,检测塔式起重机支撑架的平衡性能,避免由于其过度倾斜而引发事故。
以SCA100T 为基础设计了一款小巧、灵敏度高的倾角测量系统,分析了SCA100T 倾角传感器测角的原理,给出了系统各个模块的软硬件设计方法,同时提供了两种具有可扩展性的应用方法。
1 整体设计图1 所示为本系统的整体结构框图。
该系统采用ATmega8 单片机控制SCA100T 倾角传感器实时检测平台的倾角变化,将传感器输出的数字量进行换算后,转换为实际的倾角值。
用户可以根据需要设置警界倾角值和预定平台水平位置,倾角信息可通过LCD 实时显示或通过串口输出到上层控制器中。
当倾角信息超过预置的警界倾角值时,系统开始报警,表现为蜂鸣器报警和LED 灯闪烁。
系统根据输出方式的不同分为两种应用方式:一种是作为独立系统使用,固定在待测平台上;另一种是将该系统作为一个倾角采集模块,挂接在其他电路中使用。
前者采用LCD1602 实时显示倾角信息,采用串口超级终端预设倾角警界值和水平位置;后者通过串口输出倾角信息,允许软件编程通过发送串口命令进行配置。
配置信息均保存在ATmega8 单片机内部的EEPROM 中。
2 倾角测量原理本文选用的SCA100T 的测量范围为±30°,其内部包含硅电容感应元件、EEPROM 存储器、信号调理电路、A/D 转换器、温度传感器和SPI 传输接口等,SCA100T 功能框图如图2 所示。
该传感器具有X、Y 两个通道,分别用来测量倾斜和俯仰的加速度,每个通道具有自测试系统,可内部产生一。
SCA100T详细使用说明
Conditions
Symbol
Min
Input terminal CSB CSB输入端
VIN = 0 V
IPU VIH VIL VHYST
13 4 -0.3
CIN Input terminal MOSI, SCK
VIN = 5 V
IPD
9
VIH
4
VIL
-0.3
VHYST
CIN
Output terminal MISO
1.1 绝对的最大等级 Absolute Maximum Ratings
Supply voltage (VDD) VDD电压 Voltage at input / output pins I/O引脚电压 Storage temperature 保存温度 Operating temperature 操作温度 Mechanical shock 机械冲击
o True self test by deflecting the sensing elements’ proof mass by electrostatic force.
o Continuous sensing element interconnection
failure check.
o Continuous memory parity check. • RoHS compliant • Compatible with Pb-free reflow solder process
模拟量稳定输出负载 Analog capacitive output load 模拟端电容 Start-up delay 启动延迟
Condition条件 Vdd = 5 V; 无负载 Vout to Vdd or GND
输电线路杆塔倾斜在线监测研究及应用

输电线路杆塔倾斜在线监测研究及应用【摘要】本文探讨了输电线路杆塔倾斜监测问题,从监测系统的组成,硬件系统的构造设计等角度,探讨了监测系统的组成,以及相关的硬件选型等。
重点针对输电线路杆塔在线监测系统的总体构架、前端数据处理部分硬件设计选型,数据传输部分的硬件设计选型进行了研究。
【关键词】输电线路;杆塔;倾斜在线监测1.概述电网安全运行是社会正常运转的重要保障,一旦出现电网事故,将对工农业生产、居民生活造成极大的影响。
在各类电网安全事故中,多数都和输电线路的倒塔、断线等有关。
输电杆塔倾斜的成因很多,除了大风、洪水、地质灾害外,还和施工质量不过关、地基不均匀沉降、甚至是意外冲撞等,都可能导致杆塔的倾斜。
由于输电网络覆盖范围极广,而且数量众多的输电线路杆塔位于城市周边周边、山地、河流等自然环境更为复杂的区域,靠人力来完成对数量庞大的输电线路杆塔、线路的巡检工作效率低下,因此有必要建立起成套输电设备的在线监测,重点针对输电线路杆塔的工况进行监测,对杆塔正常工作关系密切的倾斜、震动、覆冰等工况进行在线监测,为输电线路的安全运行提供帮助。
本文将针对输电杆塔运行工况中的倾斜在线监测为对象来展开研究。
2.输电线路杆塔监测概况输电线路杆塔监测,从原理上是通过在输电杆塔以及其他附属电力设备上安装传感器来获取杆塔运行工况状态,通过对这些监测量的整合分析,来对输电杆塔的运行工况、潜在故障、安全等级等进行评估。
发达国家对输电设备工况的在线监测开展得比较早,建成的监测系统也较为完善。
国内在这方面的工作一般都是在事故发生后才进行检修,定期检修和在线状态监测还处于探索阶段。
尤其是针对输电线路杆塔的状态在线监测,是在2008年南方冰冻灾害后才引起了足够的重视,并通过国内一些电力研究机构努力,已经取得了初步成果,在部分电网建立了泄露电流监测系统、输电容量监测系统、视频远程监控系统等在线监测系统。
3.输电杆塔状态监测系统组成从监测数据的完整性角度看,对输电杆塔的状态监测需要对杆塔受迫振动、倾斜状况、杆塔周围气象数据、电缆温度、塔基应力应变等数据进行全方位的监测。
基于nRF903的无线倾角传感器设计
基于nRF903的无线倾角传感器设计王丹,王家海(辽宁工程技术大学,辽宁阜新123000)摘要:无线倾角传感器是利用无线方式传输工业现场中测量被测端面倾斜度数值的测量仪器。
文中介绍了一种以nRF903无线数传芯片为核心,利用集成倾角传感器和温度传感器设计出带有温度补偿功能的倾角传感器硬件电路,并以S3C2410为核心设计出数据接收端,对前端采集的数据进行处理。
该系统稳定性好,通信效率高,可广泛应用于工业现场测控领域。
关键词:nRF903;S3C2410;无线传感器;倾角传感器中图分类号:TP274+.2文献标识码:ABased on nRF903Wir eless I nclinat ion Angle Sensor DesignWANG Dan,WANG Jia-hai(Liaoning EngineeringTechnology University,Liaoning Fuxin123000)Key words:nRF903;S3C2410;Wireless sensor;Inclination angle sensor无线倾角传感器是无线传感器网络中用于测量被测端面倾斜角度的传感器节点,主要有传感器模块、处理器模块、无线传输模块、接收机模块四个部分组成。
由于传感器节点通常是一个完备的嵌入式系统,而且倾角传感器敏感元件本身易受温度等环境条件的影响,必须加入温度补偿,所以依据其特点设计了一种基于nRF903射频芯片的无线倾角传感器。
1nRF903简介nRF903是NORDIC公司最新推出的单片无线收发一体的芯片,采用蓝牙核心技术设计,在一个32脚的芯片中包括三段高频发射、高频接收、PLL合成、I/Q调制与解调、多频道切换、异步通信接口等,是目前集成度最高的无线数传产品。
nRF903采用抗干扰能力强的GMSK调制方式,工作频率稳定可靠,外围元件少,便于设计生产,功耗极低,工作在国际通用ISM频段,特别适用多频段多频点的应用场合,是目前无线数传的理想选择。
传感器选型列表

0.55V/g
输出
SCA610/620 互 换
SMD DIL-12LEAD
FREE
SCA610-CAHH1G 单±0.5g
4v/g
8PIN PLASTIC DIP
SCA610-CA1H1G 单±1g
2v/g
比 例 电 压 封装,水平测量,
SCA610-C21H1A 单±1g
2v/g
输出
非线性 40mg,频响
AT-201-SC-001
双±15° 0.003° 0.01 0.000 RS232 或 较常用, 内置温度补偿
°或 1 ° / RS485 数字 属于高精度系列
0.015 ℃ 输出
优点:
高精度,高分辨率,低噪声,宽温度带,温度特性好,高性价比,长期稳定
性好,低功耗,抗冲击能力强,体积小,重量轻。
应用特点:
LP3300
三维电子 罗盘 0.1 - 3Gauss
0.1°
RS232 和 RS485 数字 输出,提供 相关校核 程序
三维磁阻传感器测量平面地磁场,双轴 ±60°倾角补偿,精度 1°磁场测量精 度 100uGauss,外壳防水,无磁,温度 性能好。100mm×76mm×40mm
优点: 工作温度带宽,性价比好,测量精度好,高速高精度 A/D 转换
可调节输出频率,内置零位调整,可根据需要定制零位调整按钮,可使用内
部滤波功能,以实现在振动场合测量倾角目标,可实现 360°倾角的测量。
应用:
角度测量,水平调整,零位调整,倾角开关(十二路开关信号)。安全控制,
监控,报警,机械臂,大坝,建筑,桥梁角度测量,对准控制,弯曲控制,初始
位置控制,倾角姿态记录仪,汽车四轮定位。
高精度倾角传感器SCA100T在测斜仪中的应用
关键 词 :S A10 :测 斜仪 : 倾角 e 0T
中 图分 类号 T 2 2 文献标 识 码 :B P1
Th ppl a i n o g c ur c nc i to ea i to fhi h a c a y i l c na i n
a l e o ng es ns rSCA1 0 i m nid r c i na 0 T n o - i e to 1
Ge sin e W n a ) W u a 3 0 4) o ce cs( h n , h n4 0 7
Ab ta t s rc :Th ril i l n r d c d t e c a a t rsis a d l e a tce man y j to u e h h r c e it n I wo k n c S rig p ic p eo h x e i h a c r c n l a in a gl e s rSCAI O rn i l ft et wo a l sh g c u a y i c i t n es n o n o O T, wh c S p o u e b i ln i h i r d c d y F n a d VTl T c n l g e r o a i n e h o o i s Co p r to Th o g h r u h te e p r n a ts o fr t n t n ia e b t t y c mprh n j e y x ei me t l e t c n ma i ,j i o i d c rd t a j ma O S e e s v I po r mo e t e me s r g a c rc n t b l v o h n l o t r l t t h a u i c u a y a d s a i t f t e i c i mee as j n i n o
跷跷板车
跷跷板轮式机器人设计报告学院:电气工程学院专业班级: 自动化1106学号: 201123910920学生姓名:楚梦帅指导教师:郑维一.课程设计目的通过本次试验,我们能够加深对单片机的认识,以及加强硬件电路的设计能力。
为日后从事本专业工作打下坚实基础。
二.课程设计题目描述和要求设计制作一个电动车跷跷板,在跷跷板起始端A一侧装有可移动的配重。
电动车从起始端A出发,可以自动在跷跷板上行驶。
基本要求:在不加配重的情况下,电动车完成以下运动:(1)电动车从起始端A出发,在30秒钟内行驶到中心点C附近;(2)60秒钟之内,电动车在中心点C附近使跷跷板处于平衡状态,保持平衡5秒钟,并给出明显的平衡指示;(3)电动车从(2)中的平衡点出发,30秒钟内行驶到跷跷板末端B处(车头距跷跷板末端B不大于50mm);(4)电动车在B点停止5秒后,1分钟内倒退回起始端A,完成整个行程;(5)在整个行驶过程中,电动车始终在跷跷板上,并分阶段实时显示电动车行驶所用的时间。
三.课程设计报告内容1.1 实现方法通过车载倾角传感器对跷跷板倾角的高精度测量,实时的向控制系统反馈倾斜状态,系统根据跷跷板状态做出前进或后退动作,使跷跷板保持平衡及实现所要求的其他功能。
为保证小车在板上平稳行使,以及从地面任意位置找到跷跷板起点,在小车的前后四角各安装了一对红外发射接收传感器,通过设定合适的光强和角度,可以探测板边界的位置,配合软件分析引导小车行驶。
1.2 方案论证与选择(1)核心控制模块选择方案一:采用传统51单片机作为主控制器。
该单片机价格低廉,程序资源丰富,技术比较成熟。
但是运算速度较慢,很难担任复杂算法的计算工作;程序储存空间小,不能储存大规模程序代码。
方案二:采用MSP430F169 低功耗单片机主控芯片,该单片机IO 接口数量多,内部资源丰富,如包涵12位AD转换、16位定时器、PWM控制、USART接口等,处理能力强大,能够轻松胜任此任务。
sca100t参数介绍
●型号:SCA100T●轴数:2轴●带宽:18Hz●灵敏度:4V/g,1638LSB/g●温漂:±0.008°/℃●量程:±0.5g,30度●输出方式:SPI,模拟●供电电源:4.75V~5.25V●功耗:5mA maxSCA100T系列是基于3D MEMS的高精度双轴倾角传感器芯片,它提供了水平测量仪表级别的性能。
双轴高精度倾角传感器芯片的传感元件在测量时需要与测量平台保持平行,并且传感器双轴需相互垂直。
低温度依赖性、高分辨率、低噪声和健全的传感元件设计让SCA100T-D01、SCA100T-D02高精度双轴倾角传感器芯片成为水平测量仪器的不二选择。
VTI的倾角传感器对于振动不灵敏,因为他们都在传感元件内部增加了阻尼,并且能承受高达20,000g的机械冲击力VTI高精度双轴倾角传感器芯片SCA100T优势特点最高精度的双轴倾角传感器芯片全温区、长期保持高稳定性Ug级别的分辨率可靠能遭受超过20,000g的冲击传感器元件做了机械阻尼设计,可忽略掉振动的影响。
多种方式的自我诊断设计,方便工程调试设计非常容易使用使用标准的双排针塑料表贴封装。
不需要编程,不需要进行再校正。
内部增加温度补偿传感器。
仅需一个5V直流供电。
同时具有模拟和数字输出(SPI)接口。
单晶硅材料- 杰出的防冲击性能不会有柔性变形- 在机械冲击过程中不会有参数偏移内部气体阻尼- 机械振动辨别力经过微加工的质量块- 低于15mg/ÖHz 噪声的ug级分辨率。
相对称的电容感应传感器元件—卓越的零点依稀和稳定的灵敏感性度。
SCA100T系列是基于3D MEMS的高精度双轴倾角传感器芯片,它提供了水平测量仪表级别的性能。
双轴高精度倾角传感器芯片的传感元件在测量时需要与测量平台保持平行,并且传感器双轴需相互垂直。
低温度依赖性、高分辨率、低噪声和健全的传感元件设计让SCA100T-D01、SCA100T-D02高精度双轴倾角传感器芯片成为水平测量仪器的不二选择。
sca100tdatasheet
Signal conditioning and filtering A/D conversion
11 OUT_1
10 ST_1
Self test 1
9 ST_2
Self test 2
EEPROM calibration memory
Temperature Sensor SPI interface
1 SCK 3 MISO 4 MOSI 7 CSB
3 Application Information ....................................................................................................15
3.1 3.2 Recommended Circuit Diagrams and Printed Circuit Board Layouts ............................... 15 Recommended Printed Circuit Board Footprint ................................................................. 16
Sensing element 2
Signal conditioning and filtering
5 OUT_2
6 GND
Figure 1.
Functional block diagram
Murata Electronics Oy www.muratamems.fi
Subject to changes Doc.Nr. 8261800
1/17 Rev.B2
SCA100T Series
倾角传感器说明

倾角传感器简介3.1 倾角传感器的分类与比较倾角传感器经常用于系统的水平距离和物体的高度的测量,从工作原理上可分为固体摆式、液体摆式、气体摆式三种倾角传感器,这三种倾角传感器都是利用地球万有引力的作用,将传感器敏感器件对大地的姿态角,即与大地引力的夹角(倾角)这一物理量,转换成模拟信号或脉冲信号,他们的原理分别介绍如下:3.1.1 固体摆式倾角传感器固体摆在设计中广泛采用力平衡式伺服系统,如图1所示,其由摆锤、摆线、支架组成,摆锤受重力G和摆拉力T的作用,其合外力F为:(1)式中的θ为摆线与垂直方向的夹角。
在小角度范围内测量时,可以认为F与θ成线性关系。
如应变式倾角传感器就是基于此原理。
3.1.2液体摆式倾角传感器液体摆的结构原理是在玻璃壳体内装有导电液,并有三根铂电极和外部相连接,三根电极相互平行且间距相等,如图2所示。
当壳体水平时,电极插入导电液的深度相同。
如果在两根电极之间加上幅值相等的交流电压时,电极之间会形成离子电流,两根电极之间的液体相当于两个电阻RI3所示,左边电极浸入深度小,则导电液减少,导电的离子数减少,电阻RI减少,即RI>RIII。
反之,若倾斜方向相反,则RI<RIII。
增大,相对极则导电液增加,导电的离子数增加,而使电阻RIII和RIII。
若液体摆水平时,则RI=RIII。
当玻璃壳体倾斜时,电极间的导电液不相等,三根电极浸入液体的深度也发生变化,但中间电极浸入深度基本保持不变。
在液体摆的应用中也有根据液体位置变化引起应变片的变化,从而引起输出电信号变化而感知倾角的变化。
在实用中除此类型外,还有在电解质溶液中留下一气泡,当装置倾斜时气泡会运动使电容发生变化而感应出倾角的“液体摆”。
3.1.3 气体摆式倾角传感器气体在受热时受到浮升力的作用,如同固体摆和液体摆也具有的敏感质量一样,热气流总是力图保持在铅垂方向上,因此也具有摆的特性。
“气体摆”式惯性元件由密闭腔体、气体和热线组成。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
高精度双轴倾角传感器SCA100T
SCA100T是基于3D-MEMS技术的双轴倾角传感器系列,具有仪表级性能,用于水平垂直测量。
其传感单元的测轴分别与水平和垂直面平行。
具有低的温度影响,高分辨率,低噪声,抗干扰设计,是水平测量的理想选择。
VTI公司的倾角传感器有超阻尼敏感单元,故可承受高达20000g的机械冲击。
*(MEMS是微机电系统[Micro-Electro-Mechanical Systems]的缩写。
MEMS主要包括微型机构、微型传感器、微型执行器和相应的处理电路等几部分,它是在融合多种微细加工技术,并应用现代信息技术的最新成果的基础上发展起来的高科技前沿学科。
)
技术规格
参数条件SCA100T-D01 SCA100T-D02 单位
测量范围常温±30
±0.5 ±90
±1.0
°
g
频率响应-3dB LP 8-28 8-28 Hz
模拟量量程比例输出Vdd/2 Vdd/2 V
校准误差±0.11 ±0.23 °
数字量程1024 1024 LSB 灵敏度0~1°之间70 35 mV/°灵敏度误差±0.5 ±0.5 %
灵敏度数字输出1638 819 LSB/g
温度偏移-25~85℃(典型)
-40~125℃(最大)±0.008
±0.86
±0.008
±0.86
°/℃
灵敏度温度偏移-25~85℃(典型)
-40~125℃(最大)±0.014
-2.5~1
±0.014
-2.5~1
%/℃
%
非线性(典型)测量范围±0.11 ±0.57 °
数字输出分辨率
0~1°之间11
0.035
11
0.07
Bits
°/LSB
输出噪声密度DC~100Hz 0.0008 0.0008 °/Hz 模拟输出分辨率10Hz带宽0.0025 0.0025 °
比例误差Vdd=4.75~5.25V ±1 ±1 %
横轴灵敏度最大 4 4 %
长期稳定性<0.014 <0.014 °
最新文件仅供参考已改成word文本。
方便更改。