高精度双轴倾角传感器SCA100T
传感器SCA100T中文说明书

双轴倾角测量(X 轴、Y 轴) 测量范围 ±30° SCA100T-D01
±90° SCA100T-D02 分辨率 0.0025°(10 Hz BW, 模拟
输出) 传感元件的过阻尼的频率响应控
制(-3dB 18Hz) 稳健设计,高冲击性(20000g) 全温区、长期保持高稳定性 5V 直流供电
1. 电气特性
SCA100T 产品系列包括两个型号,SCA100T-D01 和 SCA100T-D02,区别在于其测量范 围,其他技术指标都是一样的,下表列出的是 SCA100T 具体技术指标。
1.1 绝对的最大等级
VDD 电压 I/O 引脚电压 保存温度 操作温度 机械冲击
-0.3V 至+5.5V -0.3V 至(VDD + 0.3V) -55°C 至+125°C -40°C 至+125°C 从 1 米高处跌落到混凝土表面(20000g),供电或无动力
<0.014
1
1.3 电气特性
参数 输入电压 消耗电流 操作温度 模拟量稳定输出负载 模拟端电容 启动延迟
条件
Vdd=5V;无负载
3. 应用信息.........................................................................................................................................13 3.1 推荐原理图和印刷图..........................................................................................................13 3.2 推荐 PCB 库元件封装尺寸 ...............................................................................................14
高速铁路轨道不平顺的激光测量方法研究

DOI:10.16661/ki.1672-3791.2307-5042-4508高速铁路轨道不平顺的激光测量方法研究(湖南铁路科技职业技术学院 湖南株洲 412006)摘要:高平顺性的铁路轨道是高速列车平稳、安全运行的根本保证。
铁路轨道的不平顺会导致机车车辆产生振动或者破坏,而轨道的不平顺性也是线路设计和评估的重要依据。
随着高速铁路的快速发展和列车速度的不断提高,轨道几何状态参数检测的精度和效率也需要提升。
在传统的工务维修中,铁路轨道的平顺性状态检测主要采用“相对测量”法,与全站仪等设备配合使用,但该方法检测精度不高、检测效率低,易受外界天气影响。
为保证机车车辆的安全行驶,铁路轨道需符合高平顺性要求。
利用激光准直原理,通过激光长弦发射器与数字接收光靶配合测量,可直接推算轨道的长波不平顺,有效扩大基准弦的长度。
这种方法能直接测量轨道的平顺性状态,提高检测精度与效率。
关键词:高速铁路 激光检测 长波不平顺 轨道检测中图分类号:U216.3文献标识码:A 文章编号:1672-3791(2023)23-0087-05 Research on the Laser Measurement Method of the TrackIrregularity of High-Speed RailwaysJIA Yan(Hunan Vocational College of Railway Technology, Zhuzhou, Hunan Province, 412006 China)Abstract:Railway tracks with high regularity are the foundamental guarantee for the smooth and safe operation ofhigh-speed trains. The irregularity of railway tracks will lead to the vibration or damage of railway vehicles, and theirregularity of tracks is also an important basis for the design and evaluation of the line. With the rapid developmentof the high-speed railway and the continuous improvement of the train speed, higher requirements for the accuracyand efficiency of the geometric state parameter detection of tracks are put forward. In traditional track maintenance,the "relative measurement" method is mainly used to detect the regularity of railway tracks, which is used in con‐junction with total stations and other equipment, but the detection accuracy of this method is not high with lowdetection efficiency, and it is susceptible to external weather. In order to ensure the safe operation of railway ve‐hicles, railway tracks need to meet the requirements of high regularity. In this study, by using the principle of laseralignment, the long-wave irregularity of tracks can be directly calculated through the coordinated measurement ofthe laser long-string transmitter and the digital receiving light target, and the length of the reference string can beeffectively expanded. This method can directly measure the regularity status of tracks and improve detection accu‐racy and efficiency.Key Words: High-speed railway; Laser detection; Long-wave irregularity; Track detection基金项目:2020年湖南省教育厅科学研究项目(项目编号:20C1228);2023年湖南铁路科技职业技术学院院级课题(项目编号:HNTKY-KT-2023-3)。
高精度双轴倾角传感器 SCA100T

高精度双轴倾角传感器SCA100T
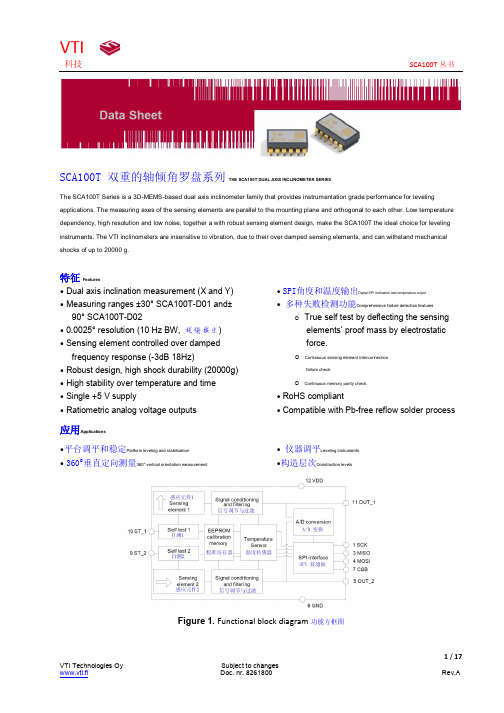
SCA100T是基于3D-MEMS技术的双轴倾角传感器系列,具有仪表级性能,用于水平垂直测量。
其传感单元的测轴分别与水平和垂直面平行。
具有低的温度影响,高分辨率,低噪声,抗干扰设计,是水平测量的理想选择。
VTI公司的倾角传感器有超阻尼敏感单元,故可承受高达20000g的机械冲击。
*(MEMS是微机电系统[Micro-Electro-Mechanical Systems]的缩写。
MEMS主要包括微型机构、微型传感器、微型执行器和相应的处理电路等几部分,它是在融合多种微细加工技术,并应用现代信息技术的最新成果的基础上发展起来的高科技前沿学科。
)
技术规格。
电动车跷跷板 新2
2007年全国大学生电子设计竞赛F题电动车跷跷板设计报告摘要本系统是以单片机AT89S52为核心,利用红外光电传感器,角度传感器以及他们的外围电路组成的测控系统,实现对在跷跷板上行驶的小车的运动状态的实时跟踪监测,由单片机对电动小车的位姿状态做出及时正确的反应,并输出相应的控制指令,经过驱动模块后由执行模块完成小车的爬行、减速、找出平衡位置并保持等一系列要求完成的整套动作。
关键词:步进电机;电动小汽车;控制AbstractThe system is at the core MCU AT89S52, using infrared photoelectric sensor, angle sensors and their external circuit composed of measurement and control system, in the seesaw of a car traveling on the state of real-time campaign tracking, MCU right by the electric trolley in state funding to timely correct response output control and the corresponding instructions, the driver module after module completed by the Executive car crawling, slow down, find balance and maintain the position, and a series of actions required to complete the package.Keywords: step motor; electronic automobile; control一、系统方案论证本系统采用的是AT89S52实现电动小车的寻迹、爬行、找平衡、返回,并达到时间上的精确控制与显示。
微小型无人机全姿态增稳控制系统的设计与实现
微小型无人机全姿态增稳控制系统的设计与实现作者:迟晓鹏罗卫兵霍丽霞来源:《现代电子技术》2010年第08期摘要:针对传统微小型无人机在飞行过程中存在的稳定性问题,指出影响稳定的因素。
提出一种基于三轴陀螺和倾角传感器构成全姿态增稳控制系统的设计方案,采用EWTS82三轴陀螺和SCA100T双轴传感器组成姿态增稳硬件控制,结合软件增稳控制,成功应用到某型微小型无人机上。
大量的试飞结果表明,基于三轴陀螺和倾角传感器构成的姿态增稳控制系统优于传统的测量单元,有很好的应用价值。
关键词:无人机; 三轴陀螺; 倾角传感器; 增稳控制中图分类号:TP212文献标识码:A文章编号:1004-373X(2010)08-0160-03Design and Implementation of All-attitude Stability Augmentation Control System of Miniature UAVCHI Xiao-peng, LUO Wei-bing, HUO Li-xia(Engineering College of Armed Police Force, Xi’an 710086, China)Abstract: According to the problems existing in flight process of traditional miniature UAV, the factors that affects the stability is pointed out, and a design scheme of all-attitude stability augmentation control system based on the tri-axis gyroscrope and tilt angle sensor is proposed. The hardware control system of attitude stability augmentation is comprised of EWTS82 tri-axis gvroscrope and SCA100T dual-axis sensor. It was applied to a certain type of miniature UAV successfully in combination with asoftware of stability augmentation contol. The flight test resultshows that the all-attitude stability augmentation control system based on tri-axis gyroscrope and tilt angle sensor is superior to conventional measurement units and it has a good practical value.Keywords:UAV; tri-axis gyro; tilt angle sensor; all-attitude; stalility augmentation control0 引言随着国内外反恐形势的日趋严峻和各类突发事件的频繁发生,对武警部队能否在各种复杂、危险的环境下,快速有效地完成任务,提出了更高的要求。
角度传感器
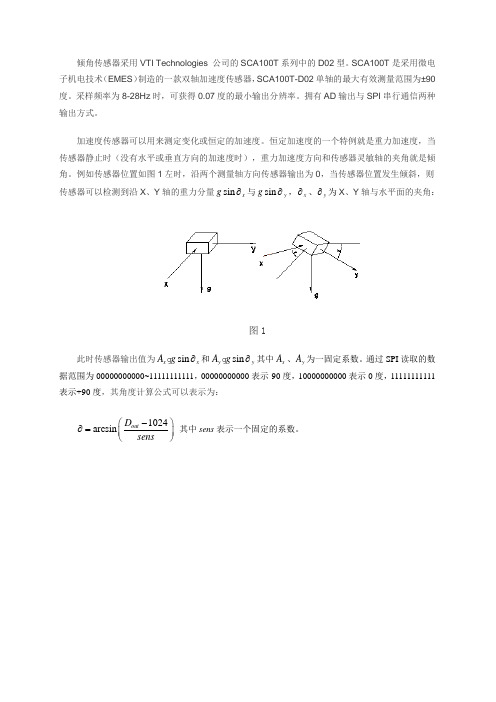
其中sens表示一个固定的系数。
倾角传感器采用VTI Technologies公司的SCA100T系列中的D02型。SCA100T是采用微电子机电技术(EMES)制造的一款双轴加速度传感器,SCA100T-D02单轴的最大有效测量范围为±90度。采样频率为8-28Hz时,可获得0.07度的最小输出分辨率。拥有AD输出与SPI串行通信两种输出方式。
加速度传感器可以用来测定变化或恒定的加速度。恒定加速度的一个特例就是重力加速度,当传感器静止时(没有水平或垂直方向的加速度时),重力加速度方向和传感器灵敏轴的夹角就是倾角。例如传感器位置如图1左时,沿两个测量轴方向传感器输出为0,当传感器位置发生倾斜,则传感器可以检测到沿X、Y轴的重力分量 与 , 、 为X、Y轴与水平面的夹角:
基于单片机的高精度倾角测量系统的设计
基于单片机的高精度倾角测量系统的设计在地质石油勘探、设备安装、道路桥梁建设等工程应用以及机器人控制、坦克和舰船火炮平台控制、飞机姿态控制等系统的自动水平调节中,都需要高精度的倾角测量。
但高精度的倾角,测量设备通常体积较大,成本高,使许多工程应用受到限制。
本文从倾角的高精度测量出发,着重介绍了倾角传感器输出稳定性处理、温度补偿、非线性处理(正弦曲线拟合)、信号调理及其测量电路的特殊处理等。
1 倾角测量系统的硬件设计倾角测量系统硬件部分主要由MEMS 传感器(含双轴倾角传感器和温度传感器)、SOC 电路、数据处理及传输和其他辅助电路等模块组成。
倾角测量系统的组成框图如图1 所示。
1.1 MEMS 倾角传感器接口MEMS 倾角传感器采用芬兰VTI Technologies 公司的SCA100T 系列中的SCA100T-D01,测量范围为±30°。
SCA100T 系列是采用微机电系统(MEMS)技术制造的一款高分辨率双轴倾角传感器。
SCA100T-D01 数字输出分辨率为0.035°/LSB,模拟输出分辨率为0.002 5°。
模拟输出的分辨率大大高于数字输出的分辨率,故本设计采用其模拟输出。
模拟输出将涉及较为复杂的模拟信号处理,如果模拟信号处理不当,系统的分辨率和精度将大打折扣,有时甚至还不如数字输出。
采用合理的模拟信号处理电路是保证系统精度的方法之一。
SCA100T-D01 内置温度传感器,可以通过其自带的SPI 数字接口读取温度值,并在处理器中进行相应的温度补偿。
这是保证系统精度的又一方法。
1.2 阻抗匹配及放大SCA100T-D01 输出阻抗为10 KΩ,为保证MEMS 倾角传感器SCA100T-D01 输出的信号有效地传递,即要求衰减最小,设计中采用了具有高输入阻抗的场效应管型运放TL081 设计了阻抗匹配电路,采用同相输入,以提高输入阻抗。
基于倾角传感器的倾角测量系统设计

基于倾角传感器的倾角测量系统设计引言目前,业内对倾角的测量多是基于MEMS 的加速度传感器,SCA100T 是由芬兰VTI 公司推出,采用三维MEMS 技术开发的一款高精度双轴倾角传感器,可同时测量相对于水平面的倾斜和俯仰角度,具有温度补偿功能。
本文以塔式起重机为应用背景,采用SCA100T 倾角传感器实时采集倾斜信息,检测塔式起重机支撑架的平衡性能,避免由于其过度倾斜而引发事故。
以SCA100T 为基础设计了一款小巧、灵敏度高的倾角测量系统,分析了SCA100T 倾角传感器测角的原理,给出了系统各个模块的软硬件设计方法,同时提供了两种具有可扩展性的应用方法。
1 整体设计图1 所示为本系统的整体结构框图。
该系统采用ATmega8 单片机控制SCA100T 倾角传感器实时检测平台的倾角变化,将传感器输出的数字量进行换算后,转换为实际的倾角值。
用户可以根据需要设置警界倾角值和预定平台水平位置,倾角信息可通过LCD 实时显示或通过串口输出到上层控制器中。
当倾角信息超过预置的警界倾角值时,系统开始报警,表现为蜂鸣器报警和LED 灯闪烁。
系统根据输出方式的不同分为两种应用方式:一种是作为独立系统使用,固定在待测平台上;另一种是将该系统作为一个倾角采集模块,挂接在其他电路中使用。
前者采用LCD1602 实时显示倾角信息,采用串口超级终端预设倾角警界值和水平位置;后者通过串口输出倾角信息,允许软件编程通过发送串口命令进行配置。
配置信息均保存在ATmega8 单片机内部的EEPROM 中。
2 倾角测量原理本文选用的SCA100T 的测量范围为±30°,其内部包含硅电容感应元件、EEPROM 存储器、信号调理电路、A/D 转换器、温度传感器和SPI 传输接口等,SCA100T 功能框图如图2 所示。
该传感器具有X、Y 两个通道,分别用来测量倾斜和俯仰的加速度,每个通道具有自测试系统,可内部产生一。
SCA100T详细使用说明
Conditions
Symbol
Min
Input terminal CSB CSB输入端
VIN = 0 V
IPU VIH VIL VHYST
13 4 -0.3
CIN Input terminal MOSI, SCK
VIN = 5 V
IPD
9
VIH
4
VIL
-0.3
VHYST
CIN
Output terminal MISO
1.1 绝对的最大等级 Absolute Maximum Ratings
Supply voltage (VDD) VDD电压 Voltage at input / output pins I/O引脚电压 Storage temperature 保存温度 Operating temperature 操作温度 Mechanical shock 机械冲击
o True self test by deflecting the sensing elements’ proof mass by electrostatic force.
o Continuous sensing element interconnection
failure check.
o Continuous memory parity check. • RoHS compliant • Compatible with Pb-free reflow solder process
模拟量稳定输出负载 Analog capacitive output load 模拟端电容 Start-up delay 启动延迟
Condition条件 Vdd = 5 V; 无负载 Vout to Vdd or GND
输电线路杆塔倾斜在线监测研究及应用

输电线路杆塔倾斜在线监测研究及应用【摘要】本文探讨了输电线路杆塔倾斜监测问题,从监测系统的组成,硬件系统的构造设计等角度,探讨了监测系统的组成,以及相关的硬件选型等。
重点针对输电线路杆塔在线监测系统的总体构架、前端数据处理部分硬件设计选型,数据传输部分的硬件设计选型进行了研究。
【关键词】输电线路;杆塔;倾斜在线监测1.概述电网安全运行是社会正常运转的重要保障,一旦出现电网事故,将对工农业生产、居民生活造成极大的影响。
在各类电网安全事故中,多数都和输电线路的倒塔、断线等有关。
输电杆塔倾斜的成因很多,除了大风、洪水、地质灾害外,还和施工质量不过关、地基不均匀沉降、甚至是意外冲撞等,都可能导致杆塔的倾斜。
由于输电网络覆盖范围极广,而且数量众多的输电线路杆塔位于城市周边周边、山地、河流等自然环境更为复杂的区域,靠人力来完成对数量庞大的输电线路杆塔、线路的巡检工作效率低下,因此有必要建立起成套输电设备的在线监测,重点针对输电线路杆塔的工况进行监测,对杆塔正常工作关系密切的倾斜、震动、覆冰等工况进行在线监测,为输电线路的安全运行提供帮助。
本文将针对输电杆塔运行工况中的倾斜在线监测为对象来展开研究。
2.输电线路杆塔监测概况输电线路杆塔监测,从原理上是通过在输电杆塔以及其他附属电力设备上安装传感器来获取杆塔运行工况状态,通过对这些监测量的整合分析,来对输电杆塔的运行工况、潜在故障、安全等级等进行评估。
发达国家对输电设备工况的在线监测开展得比较早,建成的监测系统也较为完善。
国内在这方面的工作一般都是在事故发生后才进行检修,定期检修和在线状态监测还处于探索阶段。
尤其是针对输电线路杆塔的状态在线监测,是在2008年南方冰冻灾害后才引起了足够的重视,并通过国内一些电力研究机构努力,已经取得了初步成果,在部分电网建立了泄露电流监测系统、输电容量监测系统、视频远程监控系统等在线监测系统。
3.输电杆塔状态监测系统组成从监测数据的完整性角度看,对输电杆塔的状态监测需要对杆塔受迫振动、倾斜状况、杆塔周围气象数据、电缆温度、塔基应力应变等数据进行全方位的监测。
基于SCA100T-2倾角传感器的风板控制系统设计实现
基于SCA100T-2倾角传感器的风板控制系统设计实现韩金玉;王守志【摘要】风板控制系统采用高精度双轴倾角传感器SCA100T-2实时检测帆板偏转角度,并由单片机STC12C5A60S2采集处理.数据经8位ADC0809进行A/D转换后,为减少误差采用数字平均滤波算法处理数据.系统通过自适应PID控制算法调节PWM信号,控制两台轴流风机的转速,实现精确、平稳控制风板翻转到设定角度.【期刊名称】《电子制作》【年(卷),期】2016(000)004【总页数】2页(P1-2)【关键词】风板控制系统;倾角传感器;数字滤波算法;自适应PID;PWM信号【作者】韩金玉;王守志【作者单位】天津中德职业技术学院电气工程学院 300350;天津中德职业技术学院航空与汽车学院 300350【正文语种】中文【文章摘要】风板控制系统采用高精度双轴倾角传感器SCA100T-2实时检测帆板偏转角度,并由单片机STC12C5A60S2采集处理。
数据经8位ADC0809进行A/D转换后,为减少误差采用数字平均滤波算法处理数据。
系统通过自适应PID控制算法调节PWM信号,控制两台轴流风机的转速,实现精确、平稳控制风板翻转到设定角度。
风板控制系统;倾角传感器;数字滤波算法;自适应PID;PWM信号2015年全国大学生电子设计大赛试题I组题目是风板的控制系统设计与制作,要求对系统中的轴流风机的风速控制,使得风板翻转角度(控制角度在45°~135°之间设定)在规定的时间内快速、稳定达到预定的要求。
根据系统方案设计,风板控制系统的框图如图1所示。
系统主要由单片机模块、角度检测模块、风机驱动模块、A/D 模块、LCD显示模块、声光提示模块、按键模块等构成。
通过按键设定风板的初始位置,由单片机调整PWM脉冲调宽信号,实现电机转速控制,并由单片机把设定角度显示在LCD液晶显示屏上。
安装在风板上的角度传感器将实时检测到的信号送入ADC0809进行A/D转换,然后信号经过单片机处理后得到角度值,并实时显示到液晶屏上。
基于nRF903的无线倾角传感器设计
基于nRF903的无线倾角传感器设计王丹,王家海(辽宁工程技术大学,辽宁阜新123000)摘要:无线倾角传感器是利用无线方式传输工业现场中测量被测端面倾斜度数值的测量仪器。
文中介绍了一种以nRF903无线数传芯片为核心,利用集成倾角传感器和温度传感器设计出带有温度补偿功能的倾角传感器硬件电路,并以S3C2410为核心设计出数据接收端,对前端采集的数据进行处理。
该系统稳定性好,通信效率高,可广泛应用于工业现场测控领域。
关键词:nRF903;S3C2410;无线传感器;倾角传感器中图分类号:TP274+.2文献标识码:ABased on nRF903Wir eless I nclinat ion Angle Sensor DesignWANG Dan,WANG Jia-hai(Liaoning EngineeringTechnology University,Liaoning Fuxin123000)Key words:nRF903;S3C2410;Wireless sensor;Inclination angle sensor无线倾角传感器是无线传感器网络中用于测量被测端面倾斜角度的传感器节点,主要有传感器模块、处理器模块、无线传输模块、接收机模块四个部分组成。
由于传感器节点通常是一个完备的嵌入式系统,而且倾角传感器敏感元件本身易受温度等环境条件的影响,必须加入温度补偿,所以依据其特点设计了一种基于nRF903射频芯片的无线倾角传感器。
1nRF903简介nRF903是NORDIC公司最新推出的单片无线收发一体的芯片,采用蓝牙核心技术设计,在一个32脚的芯片中包括三段高频发射、高频接收、PLL合成、I/Q调制与解调、多频道切换、异步通信接口等,是目前集成度最高的无线数传产品。
nRF903采用抗干扰能力强的GMSK调制方式,工作频率稳定可靠,外围元件少,便于设计生产,功耗极低,工作在国际通用ISM频段,特别适用多频段多频点的应用场合,是目前无线数传的理想选择。
传感器选型列表

0.55V/g
输出
SCA610/620 互 换
SMD DIL-12LEAD
FREE
SCA610-CAHH1G 单±0.5g
4v/g
8PIN PLASTIC DIP
SCA610-CA1H1G 单±1g
2v/g
比 例 电 压 封装,水平测量,
SCA610-C21H1A 单±1g
2v/g
输出
非线性 40mg,频响
AT-201-SC-001
双±15° 0.003° 0.01 0.000 RS232 或 较常用, 内置温度补偿
°或 1 ° / RS485 数字 属于高精度系列
0.015 ℃ 输出
优点:
高精度,高分辨率,低噪声,宽温度带,温度特性好,高性价比,长期稳定
性好,低功耗,抗冲击能力强,体积小,重量轻。
应用特点:
LP3300
三维电子 罗盘 0.1 - 3Gauss
0.1°
RS232 和 RS485 数字 输出,提供 相关校核 程序
三维磁阻传感器测量平面地磁场,双轴 ±60°倾角补偿,精度 1°磁场测量精 度 100uGauss,外壳防水,无磁,温度 性能好。100mm×76mm×40mm
优点: 工作温度带宽,性价比好,测量精度好,高速高精度 A/D 转换
可调节输出频率,内置零位调整,可根据需要定制零位调整按钮,可使用内
部滤波功能,以实现在振动场合测量倾角目标,可实现 360°倾角的测量。
应用:
角度测量,水平调整,零位调整,倾角开关(十二路开关信号)。安全控制,
监控,报警,机械臂,大坝,建筑,桥梁角度测量,对准控制,弯曲控制,初始
位置控制,倾角姿态记录仪,汽车四轮定位。
电动车跷跷板报告
电动车跷跷板摘要:本设计采用单片机AT89C55作为电动车跷跷板的控制及检测核心。
采用集成驱动芯片L298和PWM 波实现电动车的转向和转速控制。
通过红外传感器阵列检测引导线引导小车寻找跷跷板及在其上运动。
通过倾角传感器检测跷跷板与地面之间的夹角,采用分段模糊控制算法来控制电动车寻找平衡点,并使其逐渐到达平衡状态,用发光二极管实现平衡指示。
通过RT1602液晶实现电动车分段行驶时间、总时间、位置和跷跷板与地面夹角的显示。
外加语音分段提示功能。
1.系统方案1.1 实现方法通过对普通电动玩具车进行简单改装,采用自我设计的控制电路及软件编程,分别完成题目要求的各项功能。
1.2 方案论证基于题目要求实现的各项功能及难易程度,采用通用51系列单片机作为处理器要比采用其他单片机、FPGA 或CPLD 等更易实现系统功能。
并且成本低,编程简单。
采用倾角传感器SCA100T 检测跷跷板与地面的夹角控制电动车平衡要比使用其它角度传感器更容易实现。
在地面和跷跷板上粘贴黑色引导线,通过红外调制信号检测使电动车稳定行驶比采用在地面或跷跷板上安装其他标记装置更可靠。
采用红外编码器实现距离测量比采用霍尔传感检测精度更高。
电机驱动电路采用H 桥型集成芯片L298比采用分立元件电路稳定,电路结构简单,驱动电流大。
系统采用LCD 数据显示比采用LED 显示更直观,电路简单。
1.3 系统设计基于上述方案论证分析,本系统主要由单片机AT89C55作为控制与检测核心处理器,外加电机驱动电路、传感信号检测电路、声光提示电路、液晶显示、电源电路和语音提示电路。
本系统的结构框图如图1所示。
2 理论分析与计算2.1 引导线检测与控制方法引导线主要用于引导电动车寻找跷跷板以及保证电动车在其上稳定运行及停止在指定位置。
引导线位置如图2所示。
图1 系统的总体结构框图图中黑线A 与黑线B 是用于引导电动车寻找跷跷板;黑线C 和E 用于电动车在A 和B 端停止时检测;黑线D 用于引导电动车在跷跷板上运行。
跷跷板车
跷跷板轮式机器人设计报告学院:电气工程学院专业班级: 自动化1106学号: 201123910920学生姓名:楚梦帅指导教师:郑维一.课程设计目的通过本次试验,我们能够加深对单片机的认识,以及加强硬件电路的设计能力。
为日后从事本专业工作打下坚实基础。
二.课程设计题目描述和要求设计制作一个电动车跷跷板,在跷跷板起始端A一侧装有可移动的配重。
电动车从起始端A出发,可以自动在跷跷板上行驶。
基本要求:在不加配重的情况下,电动车完成以下运动:(1)电动车从起始端A出发,在30秒钟内行驶到中心点C附近;(2)60秒钟之内,电动车在中心点C附近使跷跷板处于平衡状态,保持平衡5秒钟,并给出明显的平衡指示;(3)电动车从(2)中的平衡点出发,30秒钟内行驶到跷跷板末端B处(车头距跷跷板末端B不大于50mm);(4)电动车在B点停止5秒后,1分钟内倒退回起始端A,完成整个行程;(5)在整个行驶过程中,电动车始终在跷跷板上,并分阶段实时显示电动车行驶所用的时间。
三.课程设计报告内容1.1 实现方法通过车载倾角传感器对跷跷板倾角的高精度测量,实时的向控制系统反馈倾斜状态,系统根据跷跷板状态做出前进或后退动作,使跷跷板保持平衡及实现所要求的其他功能。
为保证小车在板上平稳行使,以及从地面任意位置找到跷跷板起点,在小车的前后四角各安装了一对红外发射接收传感器,通过设定合适的光强和角度,可以探测板边界的位置,配合软件分析引导小车行驶。
1.2 方案论证与选择(1)核心控制模块选择方案一:采用传统51单片机作为主控制器。
该单片机价格低廉,程序资源丰富,技术比较成熟。
但是运算速度较慢,很难担任复杂算法的计算工作;程序储存空间小,不能储存大规模程序代码。
方案二:采用MSP430F169 低功耗单片机主控芯片,该单片机IO 接口数量多,内部资源丰富,如包涵12位AD转换、16位定时器、PWM控制、USART接口等,处理能力强大,能够轻松胜任此任务。
sca100t参数介绍
●型号:SCA100T●轴数:2轴●带宽:18Hz●灵敏度:4V/g,1638LSB/g●温漂:±0.008°/℃●量程:±0.5g,30度●输出方式:SPI,模拟●供电电源:4.75V~5.25V●功耗:5mA maxSCA100T系列是基于3D MEMS的高精度双轴倾角传感器芯片,它提供了水平测量仪表级别的性能。
双轴高精度倾角传感器芯片的传感元件在测量时需要与测量平台保持平行,并且传感器双轴需相互垂直。
低温度依赖性、高分辨率、低噪声和健全的传感元件设计让SCA100T-D01、SCA100T-D02高精度双轴倾角传感器芯片成为水平测量仪器的不二选择。
VTI的倾角传感器对于振动不灵敏,因为他们都在传感元件内部增加了阻尼,并且能承受高达20,000g的机械冲击力VTI高精度双轴倾角传感器芯片SCA100T优势特点最高精度的双轴倾角传感器芯片全温区、长期保持高稳定性Ug级别的分辨率可靠能遭受超过20,000g的冲击传感器元件做了机械阻尼设计,可忽略掉振动的影响。
多种方式的自我诊断设计,方便工程调试设计非常容易使用使用标准的双排针塑料表贴封装。
不需要编程,不需要进行再校正。
内部增加温度补偿传感器。
仅需一个5V直流供电。
同时具有模拟和数字输出(SPI)接口。
单晶硅材料- 杰出的防冲击性能不会有柔性变形- 在机械冲击过程中不会有参数偏移内部气体阻尼- 机械振动辨别力经过微加工的质量块- 低于15mg/ÖHz 噪声的ug级分辨率。
相对称的电容感应传感器元件—卓越的零点依稀和稳定的灵敏感性度。
SCA100T系列是基于3D MEMS的高精度双轴倾角传感器芯片,它提供了水平测量仪表级别的性能。
双轴高精度倾角传感器芯片的传感元件在测量时需要与测量平台保持平行,并且传感器双轴需相互垂直。
低温度依赖性、高分辨率、低噪声和健全的传感元件设计让SCA100T-D01、SCA100T-D02高精度双轴倾角传感器芯片成为水平测量仪器的不二选择。
基于单片机的矿用倾斜度测试仪的设计

基于单片机的矿用倾斜度测试仪的设计【摘要】针对坡度对矿山开采的影响,设计了一个基于单片机的倾斜度测试仪。
采用双轴加速度倾角传感器SCAl00T作为倾斜度的采集元件,16位的AD7705作为模数转换元件,结合单片机技术和LCD液晶显示技术,将被测物体的倾斜角度以电压的形式传递给单片机。
为提高测量精确度还增加了温度传感器对倾角传感器进行温度补偿。
软件实现电压值到角度值的换算以及对角度值的温度补偿,最终将校正后得到的角度值直接显示在LCD液晶显示器上。
【关键词】倾斜度传感器模数转换单片机液晶显示1 引言矿山作为一种特殊的地理区域,一般具有规模大、面积广、地理条件复杂等方面的问题,此外不同的矿山开采情况和作业环境差别都很大。
复杂的地理环境给矿山开采带来了很多困难,包钢集团巴润矿业公司是包钢集团主要的原料基地,巴润公司采用露天开采,与地下开采相比,露天开采资源利率高、贫化率低、产量大、劳动生产率高、成本低、劳动条件好、生产相对安全。
露天开采的方式有很多种,巴润矿业采用台阶式开采,台阶式开采各阶梯难以避免的会产生一定的倾斜角,准确的测量出矿床台阶的倾斜度可以有效的降低钻机布孔、爆破以及采装等的工序的难度。
此外,对减小设备的损耗、节约成本也有很好的效果。
本文就是针对这些目的设计的一个倾斜度测试仪。
该测试系统还可以运用于民用大坝、建筑、桥梁、玩具、海事等领域。
2 设计思想本文设计的是一个基于单片机的倾斜度测试仪。
整个测量系统以单片机为中心,以倾角传感器作为测量元件,实现对倾斜度的检测和显示。
测试中倾角传感器测得的数据是电信号,由于输出的信号为模拟量,所以需要采用模数转换芯片将采集到的模拟信号转换成可以被单片机接收的数字信号。
最后,单片机将采集到的数字信号进行处理,并显示在液晶显示器上。
此外,系统还增加了温度传感器对倾角传感器进行温度补偿,以达得到更高的测量精度。
本次设计包涵了软件和硬件两个部分,所以需要在设计中添加通信电路。
倾角传感器说明

倾角传感器简介3.1 倾角传感器的分类与比较倾角传感器经常用于系统的水平距离和物体的高度的测量,从工作原理上可分为固体摆式、液体摆式、气体摆式三种倾角传感器,这三种倾角传感器都是利用地球万有引力的作用,将传感器敏感器件对大地的姿态角,即与大地引力的夹角(倾角)这一物理量,转换成模拟信号或脉冲信号,他们的原理分别介绍如下:3.1.1 固体摆式倾角传感器固体摆在设计中广泛采用力平衡式伺服系统,如图1所示,其由摆锤、摆线、支架组成,摆锤受重力G和摆拉力T的作用,其合外力F为:(1)式中的θ为摆线与垂直方向的夹角。
在小角度范围内测量时,可以认为F与θ成线性关系。
如应变式倾角传感器就是基于此原理。
3.1.2液体摆式倾角传感器液体摆的结构原理是在玻璃壳体内装有导电液,并有三根铂电极和外部相连接,三根电极相互平行且间距相等,如图2所示。
当壳体水平时,电极插入导电液的深度相同。
如果在两根电极之间加上幅值相等的交流电压时,电极之间会形成离子电流,两根电极之间的液体相当于两个电阻RI3所示,左边电极浸入深度小,则导电液减少,导电的离子数减少,电阻RI减少,即RI>RIII。
反之,若倾斜方向相反,则RI<RIII。
增大,相对极则导电液增加,导电的离子数增加,而使电阻RIII和RIII。
若液体摆水平时,则RI=RIII。
当玻璃壳体倾斜时,电极间的导电液不相等,三根电极浸入液体的深度也发生变化,但中间电极浸入深度基本保持不变。
在液体摆的应用中也有根据液体位置变化引起应变片的变化,从而引起输出电信号变化而感知倾角的变化。
在实用中除此类型外,还有在电解质溶液中留下一气泡,当装置倾斜时气泡会运动使电容发生变化而感应出倾角的“液体摆”。
3.1.3 气体摆式倾角传感器气体在受热时受到浮升力的作用,如同固体摆和液体摆也具有的敏感质量一样,热气流总是力图保持在铅垂方向上,因此也具有摆的特性。
“气体摆”式惯性元件由密闭腔体、气体和热线组成。
基于pxi的横滚传感器自动调试系统研制
0 引言横滚传感器可以实现单方向全摆幅姿态监控[1],即单方向360°范围的姿态测量。
主要用于太阳能感光板向光控制、拖曳线阵阵形监测等需要大幅度角度监测的场合。
横滚传感器生产过程中需要调整电路参数修正零点,并对360°方位的精度进行校准,人工调试和校准的工作量较大,角度解算比较复杂,耗时较长,调试效率很大程度上影响着生产效率。
随着电子信息技术的发展,目前,以PXI 总线为代表的虚拟仪器技术已经非常成熟[2]。
采用PXI 总线的虚拟设备,相比传统的仪表,集成度更高,可实现自动化测试[3]。
只要是符合PXI 总线的板卡,可通过PXI 机箱快速搭建硬件系统,配合图形化的编程语言,根据测试需求,定制专用的自动测试系统,基于此我们专门研制了用于横滚传感器调试的PXI 平台。
1 横滚传感器基本原理[1]该测试系统调试的横滚传感器由SCA100T 构成。
SCA100 T 是一个双轴倾角传感器系列,其工作原理为固摆式,具有较高的精度,且有较强的抗振动和抗冲击能力。
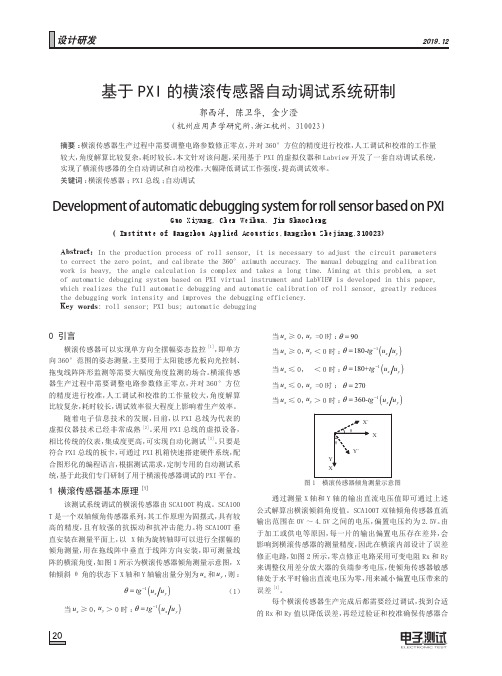
将SCA100T 垂直安装在测量平面上,以 X 轴为旋转轴即可以进行全摆幅的倾角测量,用在拖线阵中垂直于线阵方向安装,即可测量线阵的横滚角度,如图1所示为横滚传感器倾角测量示意图,X 轴倾斜θ角的状态下X 轴和Y 轴输出量分别为x u 和y u ,则: ()1x y tg u u θ−=(1)当x u ≥0,y u >0时:()1x y tg u u θ−= 当x u ≥0,y u =0时:90θ=当x u ≥0,y u <0时:()1180-x y tg u u θ−=当x u ≤0,<0时:()1180+xytg u u θ−=当x u ≤0,y u =0时: 270θ=当x u ≤0,y u >0时:()1360-x y tg u u θ−=图1 横滚传感器倾角测量示意图通过测量X 轴和Y 轴的输出直流电压值即可通过上述公式解算出横滚倾斜角度值。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
高精度双轴倾角传感器SCA100T
SCA100T是基于3D-MEMS技术的双轴倾角传感器系列,具有仪表级性能,用于水平垂直测量。
其传感单元的测轴分别与水平和垂直面平行。
具有低的温度影响,高分辨率,低噪声,抗干扰设计,是水平测量的理想选择。
VTI公司的倾角传感器有超阻尼敏感单元,故可承受高达20000g的机械冲击。
*(MEMS是微机电系统[Micro-Electro-Mechanical Systems]的缩写。
MEMS主要包括微型机构、微型传感器、微型执行器和相应的处理电路等几部分,它是在融合多种微细加工技术,并应用现代信息技术的最新成果的基础上发展起来的高科技前沿学科。
)
技术规格
参数条件SCA100T-D01 SCA100T-D02 单位
测量范围常温±30
±0.5 ±90
±1.0
°
g
频率响应-3dB LP 8-28 8-28 Hz
模拟量量程比例输出Vdd/2 Vdd/2 V
校准误差±0.11 ±0.23 °
数字量程1024 1024 LSB 灵敏度0~1°之间70 35 mV/°灵敏度误差±0.5 ±0.5 %
灵敏度数字输出1638 819 LSB/g
温度偏移-25~85℃(典型)
-40~125℃(最大)±0.008
±0.86
±0.008
±0.86
°/℃
灵敏度温度偏移-25~85℃(典型)
-40~125℃(最大)±0.014
-2.5~1
±0.014
-2.5~1
%/℃
%
非线性(典型)测量范围±0.11 ±0.57 °
数字输出分辨率
0~1°之间11
0.035
11
0.07
Bits
°/LSB
输出噪声密度DC~100Hz 0.0008 0.0008 °/Hz 模拟输出分辨率10Hz带宽0.0025 0.0025 °
比例误差Vdd=4.75~5.25V ±1 ±1 %
横轴灵敏度最大 4 4 %
长期稳定性<0.014 <0.014 °。