2015年全国大学生西门子杯工业自动化挑战赛ITEM3运动控制赛项获奖名单
西门子大赛逻辑控制赛题
2015年西门子杯全国大学生工业自动化挑战赛ITEM2逻辑控制赛项样题(版本2.0)电梯是高层宾馆、商店、住宅、多层厂房和仓库等高层建筑不可缺少的垂直方向的交通工具。
随着社会的发展,建筑物规模越来越大,楼层越来越多,对电梯的调速精度、调速范围等静态和动态特性提出了更高的要求。
目前电梯控制主要由PLC(可编程逻辑控制器)实现,现代的电梯控制除了需要满足基本的载客运货功能,还需要在保证安全的前提下,自动地、智能地制定最优的响应策略、运行速度等。
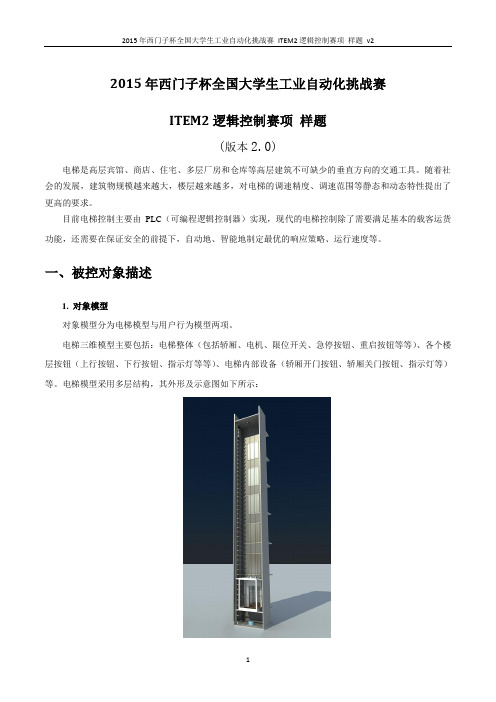
一、被控对象描述1. 对象模型对象模型分为电梯模型与用户行为模型两项。
电梯三维模型主要包括:电梯整体(包括轿厢、电机、限位开关、急停按钮、重启按钮等等)、各个楼层按钮(上行按钮、下行按钮、指示灯等等)、电梯内部设备(轿厢开门按钮、轿厢关门按钮、指示灯等)等。
电梯模型采用多层结构,其外形及示意图如下所示:电梯模型中各IO参数均可与PLC通过现场总线相连,实施自动控制。
用户行为模型指软件系统将模拟各楼层出现的用户数量(按一定概率模型)以及每位用户对电梯的操作行为,如每一名用户按下期望到达的目标楼层按钮。
用户行为模型可以模拟现实情况下大量用户使用电梯时的具体用例,从而观察PLC所控制的电梯的行为是否符合要求。
2. 设计参数(以六层电梯为例)3. 输入输出数据(1)发往控制器的数字量信号(2)控制器输出的数字量信号二、控制任务1. 单部电梯基本功能根据不同楼层客户需求,即时响应,实现自动平层、开关门、超重提示、实现上下限位,层门联锁保护等,并根据不同的需求实现合理的响应。
具体地,应包含但不限于如下功能:1)集选控制集选控制是指在信号控制的基础上把召唤信号集合起来进行有选择的应答。
电梯在运行过程中可以应答同一方向所有层站呼梯信号和操纵箱上的选层按钮信号,并自动在这些信号指定的层站平层停靠。
电梯运行响应完所有呼梯信号和指令信号后,停在最后一次运行的目标层待命。
2)开关门控制电梯未起动且门已关上或正在关闭时,如果本层召唤按钮被按下,轿门自动打开。
全国大学生西门子杯工业自动化挑战赛工程设计文件

图 1 理想速度曲线 在系统的制动段,既要对减速度进行必要的控制,以保证舒适感,又要严格地按电梯运 行的速度和距离的关系来控制,以保证平层的精度。在系统的转速降至 120r/min 之前,为了 使两者得到兼顾,采取以加速度对时间控制为主,同时根据在每一制动距离上实际转速与理 论转速的偏差来修正加速度给定曲线的方法。 电梯的运行是通过轿厢和楼层的输入信号及行程信号进行控制的。系统接收输入信号后 输出一个信号来对电梯进行运行控制。由于输入信号是随机的,所以控制系统采用随机逻辑 控制。当系统接收一个输入信号后,以逻辑控制为基础,根据电梯的运行状态对不同的输入 信号做出相应的反应来控制电梯的下一步运行。 3、系统安全分析 目前电梯控制主要由 PLC(可编程逻辑控制器)实现,现代的电梯控制除了需要满足基 本的载客运货功能,还需要在保证安全的前提下,自动地、智能地制定最优的响应策略、运 行速度等。而近来网络上接二连三出现的电梯故障致人死亡的事故,更把人们的目光聚集在 了电梯的安全问题上。 电梯安全系统一般由机械安全装置和电气安全装置两大部分组成,但是机械安全装置往 往也需要电气方面的配合的联锁,才能保证电梯安全运行。梯的安全性除了在结构的合理性、 可靠性,电气控制和拖动的可靠性方面充分考虑外,还针对各种可能发生的危险,设置专门 的安全装置。 1)防超越行程的保护 为防止电梯由于控制方面的故障,轿厢超越顶层或底层端站继续运行,必须设置保护装 置以防止发生严重的后果和结构损坏。防止越程的保护装置一般是由设在井道内上下端站附 近的强迫换速开关、限位开关和极限开关组成。防止越程的保护装置只能防止在运行中控制 故障造成的越程,若是由于曳引绳打滑、制动器失效或制动力不足造成轿厢越程,该保护装 置无能为力。 2)防超载运行保护
障情况下,制定相应的安全策略。具体地,应包含但不限于如下功能: 1)超载保护 轿厢载荷超过设定值时,电梯不响应沿途的层站召唤,按登记的轿内指令行使。电梯超
PLC报告
2015年全国大学生西门子杯工业自动化挑战赛工程设计文件ITEM2 逻辑控制赛项参赛队伍名称:YYY队参赛学校名称:合肥学院2015年 6月 25日目录一、方案设计依据、范围及相关标准 (1)1.1设计依据 (1)1.2设计范围 (1)1.3相关标准 (1)二、系统分析(包括甲方需求分析、对象特性分析、系统安全分析等) (2)2.1甲方需求 (2)2.1.1单部电梯基本功能 (2)2.1.2单部电梯运行(异常)状态监测 (2)2.1.3集群电梯的群控实现 (3)2.2电梯的基本结构 (3)2.2.1电梯的定义 (3)2.2.2电梯的组成及占用的四个空间 (3)2.2.3电梯整体结构 (4)2.3电梯分类 (5)2.3.1根据电梯用途分类 (5)2.3.2根据电梯运行速度分类 (7)2.3.3按有无电梯机房分类 (7)2.3.4按曳引机结构型式分类 (8)2.4安全保护系统 (8)2.4.1电梯可能发生的事故和故障 (8)2.4.2电梯安全保护系统的组成 (9)2.4.3电梯安全保护装置的动作关联关系 (9)三、控制系统设计(包括控制逻辑、控制回路、控制算法等的选择,开机、停机等控制逻辑以流程图表达) (11)3.1控制系统的组成及关系 (11)3.2具体控制 (11)3.2.1故障检测及电梯启动 (12)3.2.2 电梯正常运行 (13)3.2.3错误指令自动消除控制 (14)3.2.4楼层门锁控制 (15)3.2.5数码管显示控制 (16)3.2.6集群电梯的群控实现 (17)四、控制系统选型与系统连接 (19)4.1电梯控制系统选型 (19)4.1.1控制器的选型与比较 (19)4.1.2 PLC优点 (20)4.2电梯仿真IO列表 (21)五、经济效益分析 (24)5.1成本分析 (24)5.2投资估算 (25)图2-2 电梯基本结构电梯分类根据电梯用途分类图2-3 电梯安全系统关联图由上图可知,当电梯出现紧急故障时,分布于电梯系统各部位的安全开关被触发,切断电梯控制电路,曳引机制动器动作,制停电梯。
2015年全国大学生电子设计竞赛获奖名单

2015年全国大学生电子设计竞赛获奖名单2安徽本科A安徽大学朱伟风郝文博许文祥二等奖3安徽本科A安徽大学钱欢李浩南赵颖二等奖4安徽本科A安徽大学付煜欣欧博文王珏二等奖5安徽本科B安徽大学高丽蓉马晓忠刘昆二等奖6安徽本科B安徽大学鲁立宇马自强王宁诚二等奖7安徽本科D安徽大学王侨侨段玉彪李杰二等奖8安徽本科D安徽大学王庆安管州李晨轩二等奖9安徽本科B安徽工程大学解猛阮子良冯紫妍一等奖10安徽本科B安徽工程大学张汇锋卢家付钱文秀一等奖11安徽本科B安徽工程大学翟宇陈强马艳艳二等奖12安徽本科B安徽工程大学彭国梁潘钺高磊二等奖13安徽本科G安徽工程大学江柳董子汉张南飞一等奖14安徽本科C安徽工程大学机电学黄涛李琦刘雄二等奖15安徽本科B安徽工业大学陈小锋沈冬冬陈朋朋二等奖16安徽高职H安徽机电职业技术学恒非非耿威王志强一等奖17安徽高职I安徽机电职业技术学汪瑞李秀王明明二等奖18安徽本科A安徽师范大学李改有李亚张志豪二等奖19安徽本科G安徽新华学院陶冶胡泽报王磊一等奖20安徽本科B合肥工业大学郭延锐金志杰赵薇一等奖21安徽本科B合肥工业大学刘耀东许柯赵廷碧二等奖22安徽本科A合肥学院石响汪程禹芮二等奖23安徽本科B合肥学院龙军华童鹏吴兴林二等奖24安徽本科B河海大学文天学院朱宏伟桂青青二等奖25安徽本科B解放军电子工程学院李云成熊力黄超一等奖26安徽本科D解放军电子工程学院陈乐东许超辛立刚二等奖27安徽高职H芜湖职业技术学院袁川方宇谢朋二等奖28安徽高职I芜湖职业技术学院陈家玉姚震余成林一等奖29安徽高职J芜湖职业技术学院吴杰张中姚俊二等奖30北京本科A北方工业大学吕恒宇李辰佂陈欣月一等奖31北京本科A北方工业大学黄伟超刘东侯宗祥一等奖32北京本科A北方工业大学栾文南罗琦钫张东晨二等奖33北京本科A北方工业大学刘志孟刘强熊振驭二等奖34北京本科G北京电子科技学院成容吴伊冉李城豪二等奖35北京高职H北京电子科技职业学铁丽丽师令李言一等奖36北京本科B北京工业大学孙兴伟邱永康米文昊二等奖37北京本科B北京工业大学卢佳豪赵晋王飞二等奖38北京本科D北京工业大学王岳韩扬周朔一等奖39北京本科D北京工业大学张若杨宋耀东梁佳兴二等奖40北京本科A北京航空航天大学翁启旺谭煜希王聿正二等奖41北京本科A北京航空航天大学秦文渊曹斌陈靖方二等奖42北京本科B北京航空航天大学罗雪松鞠孝亮张晓薇一等奖43北京本科B北京航空航天大学李智康屈珅李恺二等奖44北京本科D北京航空航天大学海钢锋张凯张启明二等奖45北京本科D北京航空航天大学牛泽杨佳颖刘渊二等奖46北京本科D北京航空航天大学刘雅娴王晨焱谢一平二等奖47北京本科D北京航空航天大学谭笑封刘爱东李柳二等奖48北京本科E北京航空航天大学王子钰武迪何涛一等奖49北京本科E北京航空航天大学王达威李伟孙世攀二等奖50北京本科F北京航空航天大学于丽婷马抒恒王莉一等奖51北京本科F北京航空航天大学田文倩张文涛孙霁泽二等奖52北京本科G北京航空航天大学张松阳何沃洲王孖杰二等奖53北京本科B北京交通大学幸亚东冯禹宋涛二等奖54北京本科B北京交通大学姜波姚远孙欢二等奖55北京本科B北京理工大学张笛王虞倩田晓辉一等奖56北京本科B北京理工大学李楠刘燕闽宁可二等奖57北京本科D北京理工大学朱亮亮罗程丰王战泽二等奖58北京本科D北京理工大学胡晓宁喻露闫程亮二等奖59北京本科E北京理工大学邵国亮胡文庆郑桥一等奖60北京本科E北京理工大学徐泽厚甘一鸣包嘉诚二等奖61北京本科F北京理工大学梅琳焱秦臻钱能二等奖62北京本科F北京理工大学冯冬博曹哲曹先乐二等奖63北京本科F北京理工大学孙嘉明应乐刘祎静二等奖64北京本科F北京理工大学刘思远米央翟登月二等奖65北京本科B北京联合大学熊磊王磊秦志金二等奖66北京高职I北京信息职业技术学王振义王子润二等奖67北京本科B北京邮电大学黄玉志耿男费薇二等奖68北京本科D北京邮电大学孔德伟马馨郁李煜哲二等奖69北京本科G北京邮电大学尹明晰王媛邱启哲二等奖70北京本科G北京邮电大学邱德武杜纯宁刘博闻二等奖71北京本科B华北电力大学李云鸷苏健陈修森一等奖72北京本科B华北电力大学钱一琛呼海林杨超二等奖73北京本科B华北电力大学冯良骏古有志朱瑞迪二等奖74北京本科B华北电力大学顿鹏翔王秋伶宋册二等奖75北京本科A中国矿业大学(北姜庆箐宋立冬顾亚旗二等奖76北京本科A中国矿业大学(北王义吴伟明郑杜成二等奖77福建本科A福建工程学院张卫东林仁飞林志滨二等奖78福建本科E福建工程学院翁丽丽杨朝政甘志杰二等奖79福建本科B福建农林大学陈廷联李巍王钰铭一等奖80福建本科B福建农林大学钟奕辉陈霖林跃江二等奖81福建本科B福建农林大学欧俊宝江道淮林思翔二等奖82福建本科B福建农林大学郑榕祥蔡志峰李振嘉二等奖83福建本科G福建师范大学詹兴山廖水萍吴剑煌二等奖84福建本科A福州大学庄胜斌林泓涛张长坤二等奖85福建本科B福州大学张州王杰炜一等奖86福建本科B福州大学王群兴尤伊棠吴宇鹏一等奖87福建本科B福州大学王仁康何剑锋杨毅豪二等奖88福建本科B福州大学张林亮安廖宇辰二等奖89福建本科C福州大学郑伟宏陈章华谢金明一等奖90福建本科C福州大学骆昭阳郭瑝清卢箫扬二等奖91福建本科C福州大学王小婷熊化春陈建猛二等奖92福建本科D福州大学陈丽煊翼陈燕萍一等奖93福建本科D福州大学钟姚诗晖张志敏二等奖94福建本科F福州大学高贵虎张勇鹏吴建耀一等奖95福建本科F福州大学陈闽强陈嘉哲黄伟凯一等奖96福建本科G福州大学杨悦书王必贤倪冠军二等奖97福建本科A华侨大学张佳鑫林城辉陈庆灿二等奖98福建本科B华侨大学谭玉莲陈奋裕叶毅麒一等奖99福建本科B华侨大学洪家桦杨清础陈志鹏一等奖100福建本科B华侨大学郭志和旻黄章林二等奖101福建本科D华侨大学陈奇龙鑫侯进辉二等奖102福建本科D华侨大学李招灵坡邹彩琴二等奖103福建本科E华侨大学杨洪财何佳良曾佑旭二等奖104福建本科E华侨大学陈傅煜杰翔二等奖105福建本科E华侨大学冯少义谢谱敏王铎沣二等奖106福建本科E华侨大学连海斌许鹏健林永嘉二等奖107福建本科B集美大学康俊勇苏烈鹏吴培民二等奖108福建本科B集美大学诚毅学院李杨顺福陈财宝一等奖109福建高职I湄洲湾职业技术学院蔡建斌杰杨明鑫二等奖110福建本科A闽江学院丁穆友林全明吕栋梁二等奖111福建本科A闽江学院黄献彬醇张永强二等奖112福建本科D闽江学院黄忠杰翔黄周敏一等奖113福建本科F闽江学院吴玉源张川二等奖114福建本科F闽江学院徐少伟王海斌陈明强二等奖115福建本科A闽南师范大学高志伟陈凯新林瑰霞二等奖116福建本科A闽南师范大学曾松彬林成镇高雯雯二等奖117福建高职H闽西职业技术学院黄松宏林小龙王双双二等奖118福建本科F莆田学院郑伯洪白韧祥汤华锋二等奖119福建本科A三明学院谢张志煌凡二等奖120福建本科A三明学院沈志亮梁其波林振辉二等奖121福建本科F三明学院林东东张亚威朱婉露二等奖122福建本科A厦门大学王杰祥陈超奇王华星二等奖123福建本科F厦门大学陈学文叶超林戴灿煌二等奖124福建本科F厦门大学吴日升吴少俊徐景鑫二等奖125福建本科A厦门大学嘉庚学院叶晶晶许江绍伟二等奖126福建本科C厦门大学嘉庚学院江艺勇缪陈志芬二等奖127福建本科F厦门大学嘉庚学院谢思宇黄记毅颜逾越二等奖128福建本科G阳光学院卢诚华郑明法张冠雄二等奖129甘肃本科B兰州大学陈天航高侃妮脱艳红二等奖130甘肃本科G兰州大学黄麟蒲中柱曹剑锋二等奖131甘肃本科B兰州交通大学张庆尧吴银平郑相如一等奖132甘肃本科B兰州交通大学蔡婧王乐泉付园淋二等奖133甘肃本科F兰州交通大学戈雅帅刘亚龙肖伟明二等奖134甘肃本科A兰州理工大学陈远鹏王欢高成强二等奖135甘肃高职J兰州文理学院荆超冯晓龙郭春梅二等奖136甘肃高职I兰州职业技术学院薛建斌王单单于二等奖137甘肃本科B陇东学院杨彩虹梁志斌黄勇二等奖138广东高职I东莞职业技术学院薛胜朋吴永理陈展雄二等奖139广东本科B佛山科学技术学院黎文飞曾维亮张俊华二等奖140广东本科B佛山科学技术学院区达明丁嘉豪刘永志二等奖141广东本科A广东工业大学李晃忠林创龙陈林海二等奖142广东本科A广东工业大学谢楚康蔡森矗邵浩贤二等奖143广东本科G广东工业大学华立学陈锐俊谢振汉梁嘉强二等奖144广东本科A广东技术师范学院王嘉荣伍华城王小聪二等奖145广东本科B广东技术师范学院何应德张鸿王锦成二等奖146广东本科B广东药学院陈奋良陈日成吴耀龙二等奖147广东高职I广州民航职业技术学叶丽其郭惠玲赵清二等奖148广东本科G广州商学院方桂燕黄流已林忠兴二等奖149广东本科G广州商学院钟山谭东炜吴梽晖二等奖150广东高职J河源职业技术学院廖文清张洪宇余晓鹏一等奖151广东本科A华南理工大学赵银湖刘博翰杨建新二等奖152广东本科D华南理工大学郑浩东朱焕升林小颖二等奖153广东本科A华南农业大学高育滨庄煜坤陈海涛二等奖154广东本科B华南农业大学杨海良唐松泉周慧聪二等奖155广东本科B华南农业大学吴应金张国培郑泽武二等奖156广东本科B华南农业大学张展明周伯齐董锐华二等奖157广东本科D华南师范大学谢鸿钧陈铭林蔡泽海二等奖158广东本科D华南师范大学余伟江李恩罗展鸣二等奖159广东本科E华南师范大学李智华倪伟乾冯钊洪一等奖160广东本科F华南师范大学陈冠成吴添杨李汀鸿二等奖161广东本科F华南师范大学陈冠成吴添杨李汀鸿二等奖162广东本科B惠州学院许志伟吴卓铤丘瑞炜一等奖163广东本科B惠州学院钟宇祺方文田黄业成二等奖164广东本科B惠州学院谢侨壮陈少桂江佳婷二等奖165广东本科D暨南大学张凯鹏林韵立张培熙二等奖166广东本科D暨南大学谭清愉欧炽柱黎政坛二等奖167广东本科F暨南大学张洪宽吴俊杰蔡冰二等奖168广东本科A嘉应学院侯毓升郑辉团方伟鹏二等奖169广东本科B汕头大学朱建基许乃丹梁钦灿二等奖170广东高职I深圳职业技术学院全建军秦晓明吴锦伦二等奖171广东高职J深圳职业技术学院张志豪陈荣添张书斌二等奖172广东高职I顺德职业技术学院陈创杰钟浩林余二等奖173广东高职H中山火炬职业技术学李恒运曾志豪张家俊二等奖174广西本科A百色学院玉植广林龙泽陈振旺二等奖175广西本科A广西大学阮肖宾王嗣舜覃东晴二等奖176广西本科B广西大学马剑豪梁昌豪黄显平二等奖177广西高职I广西机电职业技术学温家国梁骑山冉明勇二等奖178广西本科B广西科技大学陈强孔祥强陈远升二等奖179广西本科G广西科技大学鹿山学邓光德吴庆松王健二等奖180广西高职I广西理工职业技术学覃春文韦国龙林福二等奖181广西本科B广西师范大学何世文廖海华全宏春二等奖182广西高职H广西职业技术学院李胜坤李春毅黄金靖一等奖183广西本科A桂林电子科技大学范里政李长树蒋家裕一等奖184广西本科B桂林电子科技大学李天生周智俊韦武伺一等奖185广西本科B桂林电子科技大学邓建翔迟皓元陈文卿一等奖186广西本科B桂林电子科技大学钟海李博艺饶裕二等奖187广西本科B桂林电子科技大学容家宇胡凯旋方国算二等奖188广西本科D桂林电子科技大学陆天辰刘渠陈广雷一等奖189广西本科D桂林电子科技大学林桂斌李桥鸣宋文亮一等奖190广西本科D桂林电子科技大学陶怀苗麻洁光江世贝二等奖191广西本科E桂林电子科技大学莫雨晴蓝友马谋一等奖192广西本科E桂林电子科技大学屈明伟甘育仪何基仕二等奖193广西本科F桂林电子科技大学梁弘文黄志强罗淞一等奖194广西本科F桂林电子科技大学李卫谅李杭桂覃俊慧一等奖195广西本科F桂林电子科技大学杨枝广梁荣壬莫海军二等奖196广西本科F桂林电子科技大学谭冬林罗广林宁宏业二等奖197广西本科G桂林电子科技大学秦晨钟赵振超沈通桥一等奖198广西本科B 桂林电子科技大学信息科技学院梁星浩胡知寒钟全春二等奖199广西高职I 桂林电子科技大学职业技术学院胡世伟孙斌韩巧楠一等奖200广西本科C桂林航天工业学院谭俭辉梁存旭林雪霞二等奖201广西高职H桂林航天工业学院潘琪韩明流陈其鸿二等奖202广西本科B桂林理工大学李锡文赵胜达曹开远二等奖203广西本科B河池学院严志凡刘家辉甘秋香二等奖204广西本科F贺州学院廖斯哲覃尚东梁泽婷一等奖205广西高职I柳州铁道职业技术学张龙江姚坚杏黄金玉二等奖206广西高职J柳州铁道职业技术学陈吉星张涛李明杰一等奖207广西高职H南宁学院韦胜超黎国亮赖仕修二等奖208广西高职I南宁学院韦志卫廉冰蓝榆幸一等奖209广西本科A钦州学院蒙纪全杨贵童赖创文二等奖210广西本科B钦州学院陈奕均赖烨付北钊二等奖211广西本科A玉林师范学院封时彬黄英文林芳成二等奖212广西本科A玉林师范学院黄玉骞张永安莫业丽二等奖213广西本科A玉林师范学院梁有赵林建秋龙家静二等奖214广西本科A玉林师范学院黄敏周金胜黄京松二等奖215广西本科F玉林师范学院钟振雄廖国欣梁万权二等奖216贵州高职H 贵州电子信息职业技术学院丁林赵浩郑周金二等奖217海南高职I海南科技职业学院万风孙鸿钦覃祚钊二等奖218海南高职J海南科技职业学院高递翁时坤庞正威二等奖219海南高职J海南软件职业技术学文宠哲莫兰能林煌一等奖220海南本科B琼州学院杨鸿基潘刘成陈玉二等奖221河北高职H保定电力职业技术学王宁李云爽二等奖222河北高职I承德石油高等专科学宋策磊一等奖223河北高职J承德石油高等专科学李阳李海锋二等奖224河北本科A东北大学秦皇岛分校周坤贾春剑二等奖225河北本科B东北大学秦皇岛分校张醒儿韩昕宇郑春厚二等奖226河北本科B东北大学秦皇岛分校孙天杰白建军杨浩艺二等奖227河北本科F防灾科技学院孙柳青张懿仁余东姝二等奖228河北本科F河北工业大学李小帅刘雪淋杨祎楠二等奖229河北本科F河北工业大学陈智星靳沛霖张钰辉二等奖230河北本科A河北科技大学杨红坤王梓亦张德正二等奖231河北本科A河北科技大学李光伟田晓阳魏二等奖232河北本科B河北科技大学程光耀王博阳刘石磊二等奖233河北本科A河北师范大学马冠华袁志二等奖234河北本科B华北理工大学杨也顾海仑一等奖235河北本科B华北理工大学翟葆朔陈颖一等奖236河北本科B华北理工大学裴春祥刘祉正赵新鹏二等奖237河北本科D军械工程学院王忠宇牟弦和杨成全二等奖238河北本科F军械工程学院刘亨杰袁国刚赵承云二等奖239河北本科G军械工程学院郭崇治黄伟华宋浩宇二等奖240河北高职I石家庄职业技术学院温海超杨海涛赵德彪一等奖241河北本科A燕山大学王林广胡康一等奖242河北本科A燕山大学徐艳超夏俊雄杨庆收二等奖243河北本科B燕山大学何祎赵雄雷一等奖244河北本科B燕山大学余晨鸣薛明二等奖245河北本科C燕山大学李放侯利朋一等奖246河南本科A河南工程学院陈佳闯马朋涛杜浩浩二等奖247河南本科B河南工程学院冯赛赛刘少帅王凯二等奖248河南本科A河南理工大学陈鑫王礼贺王现利二等奖249河南本科B河南理工大学申高波黄泊翰齐慧鑫二等奖250河南本科A黄河科技学院张睿蒿鹏飞刘博文一等奖251河南本科A黄河科技学院张凯姬航宇郭晓军二等奖252河南本科C黄河科技学院汪杨茗邹霖贺旭阳二等奖253河南本科D黄河科技学院韩亚洲郭朋军王玲一等奖254河南本科F解放军信息工程大学黄振华唐敏王金锐一等奖255河南本科F解放军信息工程大学周霂阮鑫舒士祺一等奖256河南本科F解放军信息工程大学周馨博王璐二等奖257河南本科F解放军信息工程大学王健林思泽二等奖258河南本科G解放军信息工程大学李岩枫兰天任梁鹏二等奖259河南本科B南阳理工学院杨宜秋张海涛杨磊二等奖260河南本科C南阳理工学院黄向康郑新鸿司宇航二等奖261河南高职I南阳理工学院宋孝心王肖静张学森一等奖262河南本科B信阳师范学院李权威崔宁宁康鑫二等奖263河南本科A郑州大学陆啸陈亚雄党丽薇一等奖264河南本科A郑州大学冯绍卿史耿二等奖265河南本科A郑州大学侯坤鹏俞晓云胡金灿二等奖266河南本科B郑州大学夏朝郑留帅李杏宇一等奖267河南本科B郑州大学张伟林崔巍曹卫杰一等奖268河南本科B郑州大学陈自强王键王嘉昌二等奖269河南本科E郑州大学岳平越冯彤二等奖270河南本科F郑州大学侯留洋贾涵博张二等奖271河南本科B 郑州大学西亚斯国际学院王明超禹庆业魏子涵二等奖272河南本科A郑州轻工业学院吴颜鹏宋金亮娄霄二等奖273河南本科A郑州轻工业学院慕帅帅李悦功肖智岗二等奖274河南本科B郑州轻工业学院卫蒙磊张进张腾飞一等奖275河南本科D郑州轻工业学院韩振帅杨振江丁光涛一等奖276河南本科F郑州铁路职业技术学程强张凯奇楚如愿二等奖277河南高职H郑州铁路职业技术学霍亮琦王鹏鹏吕宾宾一等奖278河南高职H郑州铁路职业技术学李政轩董春存梁志毅一等奖279河南高职I郑州铁路职业技术学王壮壮李建超黄金威一等奖280河南高职J郑州铁路职业技术学杨翠刘文章徐飞龙二等奖281河南本科A中原工学院段帅帅范衍铖王鹏一等奖282河南本科A中原工学院熊美军贾正双刁凯旋二等奖283河南本科A中原工学院方达马自良张高建二等奖284河南本科B中原工学院李科进闫笑洪蒋清泉二等奖285河南本科F中原工学院曾祥鑫薛久辉魏伟一等奖286河南本科F中原工学院张源王东梁孙钊二等奖287河南本科F中原工学院李昭豪郭春晖李杰二等奖288河南本科G中原工学院孟世昌逯晓波李杨一等奖289河南本科B 中原工学院信息商务学院李申健牛运晨陈超二等奖290黑龙江本科B大庆师范学院王永鹏许柏顺刘卓群二等奖291黑龙江本科D东北林业大学李旺王晋晶史凡萍二等奖292黑龙江本科B东北农业大学郭生智莫家宝李晓维二等奖293黑龙江本科F东北石油大学黄俊荣刘春华刘娜二等奖294黑龙江本科B哈尔滨工程大学刘飞李晓龙孙义东一等奖295黑龙江本科B哈尔滨工程大学权申明张永奇杨浩然一等奖296黑龙江本科D哈尔滨工程大学郭松张成志于靖洋二等奖297黑龙江本科D哈尔滨工程大学陈淮范彦琪曲福新二等奖298黑龙江本科D哈尔滨工程大学邓扬军许占科黄林敏二等奖299黑龙江本科D哈尔滨工程大学田鹏明郑晓雁刘天娇二等奖300黑龙江本科E哈尔滨工程大学曹鹏卢炳坤蒋良茂二等奖301黑龙江本科E哈尔滨工程大学林达张磊呼延兴二等奖302黑龙江本科E哈尔滨工程大学孙正源彭艳华卢文正二等奖303黑龙江本科F哈尔滨工程大学潘易辰翟命鑫李浩哲一等奖304黑龙江本科F哈尔滨工程大学陈捷周宗飞朱闪闪二等奖305黑龙江本科G哈尔滨工程大学李辉马兆岩袁锐锟二等奖306黑龙江本科A哈尔滨工业大学刘建伟张鹏周梦婷二等奖307黑龙江本科A哈尔滨工业大学唐佳棋郭佰威陈扬洋二等奖308黑龙江本科B哈尔滨工业大学张旭郎秋生孙钟柏二等奖309黑龙江本科D哈尔滨工业大学吴雨珊郭明哲党宇二等奖310黑龙江本科D哈尔滨工业大学曹浩天杨攀蔡景丰二等奖311黑龙江本科B哈尔滨理工大学康维邵德奇尚雷二等奖312黑龙江本科B哈尔滨理工大学张道林周志刚苏璐璐二等奖313黑龙江本科C哈尔滨理工大学高帅鹏尹航周文超二等奖314黑龙江本科B黑龙江大学韩冰孙立平陈丽艳二等奖315黑龙江高职H 黑龙江交通职业技术学院张世达于鑫二等奖316黑龙江本科A黑龙江科技大学李钚杨荣浩宋天琦二等奖317黑龙江本科A黑龙江科技大学谭成城张凯韩月明二等奖318黑龙江本科A黑龙江科技大学姜赫季磊于炜晗二等奖319黑龙江本科B黑龙江科技大学蔡泽斌董越张贤慧二等奖320黑龙江本科C黑龙江科技大学辛亮王忠潇张思凡二等奖321黑龙江高职J 黑龙江农业工程职业学院王庆亮于振刘勇佐二等奖322黑龙江本科B齐齐哈尔大学梁庆阳陈宜王飞二等奖323湖北本科A湖北工业大学段志杰田争鸣黄世丽一等奖324湖北本科B湖北汽车工业学院熊国强张磊二等奖325湖北高职J 湖北水利水电职业技术学院徐咏聂自鹏一等奖326湖北本科B湖北文理学院肖碧成蔡凯一等奖327湖北本科A华中科技大学冯红开祝熠凡鲁哲别一等奖328湖北本科A华中科技大学张艺镨韩豪杰唐一等奖329湖北本科A华中科技大学曹鹏举黑泽新牛金涛二等奖330湖北本科A华中科技大学陈宇安二等奖331湖北本科B华中科技大学黄张弘钟彬一等奖332湖北本科B华中科技大学陈家振夏国宇康二等奖333湖北本科E华中科技大学谭昌忍朱耀伟曾德文二等奖334湖北本科B华中农业大学王京哲姜庆峰季荣炬二等奖335湖北本科D华中农业大学郭栋迪二等奖336湖北本科F华中师范大学向俊唐鸣跃一等奖337湖北本科F华中师范大学彭干涛汤海波钟一等奖338湖北本科F华中师范大学石汶奇于溪二等奖339湖北本科G华中师范大学史佳欣李达一等奖340湖北本科G华中师范大学林静奇一等奖341湖北本科B解放军海军工程大学金盛羽吴烁二等奖342湖北本科A三峡大学田玄玄刘泗军文海艳一等奖343湖北本科B三峡大学龚波龚一等奖344湖北本科B文华学院钟皇平马龙升雷一等奖345湖北本科B武昌理工学院杜昂程志坚一等奖346湖北本科A武汉大学姚彤彤赵久瑞谢德强一等奖347湖北本科A武汉大学祁发瑞甘文霜宋洪亚一等奖348湖北本科A武汉大学陈慧李二等奖349湖北本科C武汉大学孟凯涛罗际炜王福民一等奖350湖北本科E武汉大学占伟杰项进喜田二等奖351湖北本科F武汉大学王帅曹建发一等奖352湖北本科F武汉大学程宇刘同同一等奖353湖北本科F武汉大学王思捷马玉爽陈二等奖354湖北高职H武汉交通职业学院李奇建查斌二等奖355湖北本科F武汉科技大学皮春春朱子文刘一等奖356湖北本科A武汉理工大学赵焕章谢乘胜林功恒一等奖357湖北本科B武汉理工大学柳石林王一飞郭砚辉二等奖358湖北本科B武汉理工大学曹晓东高星远陈贵宾二等奖359湖北本科D武汉理工大学方理李一等奖360湖北本科F武汉理工大学张国昌唐林怀潘玉婷一等奖361湖北本科F武汉理工大学张云波徐啸宇邱劲松二等奖362湖北高职H武汉软件工程职业学黄祖林柯威威郑二等奖363湖北高职I武汉软件工程职业学林成吴二等奖364湖北本科B中国地质大学(武江朝东张可鑫李一等奖365湖北本科B中国地质大学(武陈再闯黄上都邱一等奖。
全国大学生西门子杯工业自动化挑战赛设计开发型赛项总决赛评分规则

全国大学生西门子杯工业自动化挑战赛设计开发型赛项
总决赛评分规则
设计开发型赛项总决赛成绩满分100分,由工程现场实施与方案答辩两部分组成,分值分配如下:
一、工程现场实施评分规则
工程现场实施环节满分70分,由硬件接线、系统实现和扰动测试两部分组成,分值分配如下:
1.硬件接线规则
硬件接线比赛环节,30分钟之内,要求将PCS 7远程IO中的AI模块与SMPT-1000仪表测量输出模块进行接线,并确保通讯正常。
硬件接线成绩由裁判组给出,对线缆连接及配置(满分100分,权重0.04)、系统通讯(满分100分,权重0.06)进行打分。
具体评分规则如下:
硬件接线的详细评分依据参见《2015年全国大学生西门子杯工业自动化挑战赛设计开发型赛项硬件接线评分表》,最终以表格形式报告评分结果。
2.系统实现规则
系统实现比赛环节中要求30分钟之内,系统快速、平稳投运,在开车过程中维持各动态指标在要求范围内,系统稳定运行后保持各稳态指标在要求范围内。
系统实现成绩由自动评分系统(2015版)给出,对开车过程、控制效果、能耗产量以及稳定与安全指标进行综合打分。
评分过程由裁判组监督并确认。
具体评分规则如下:。
最新全国大学生西门子杯工业自动化挑战赛工程设计文件资料

4)运行保护
为安全起见,在门区外,系统设定不能开门。
在非检修状态,电梯运行过程中,如果连续运行了运行时间限制器规定的时间后,其中没有平层开关动作过,系统就认为检测到钢丝绳打滑故障,所以就停止轿厢的一切运行,直到断电复位或转到检修状态时,才能恢复正常运行。
3)错误指令消除
当电梯到达最远层站将要反向时,原来所有后方登记的指令全部消除。连按2次错误指令的按钮,该等级的信号就被取消。
4)开门延时/关门保护
无司机运行时,电梯到站自动开门后,延时若干时间自动关门。在关门过程中,当安装在轿厢门口的光电信号或机械保护装置探测到有人或物体在此区域时,立即重新开门。
5)待载休眠
2015年全国大学生西门子杯工业自动化挑战赛工程设计文件
ITEM2逻辑控制赛项
参赛队伍名称:
参赛学校名称:
2015年6月28日
一、方案设计依据、范围及相关标准
1、方案设计依据
(1)全国大学生西门子杯工业自动化挑战赛逻辑控制赛项高校组初赛赛题及初赛细则;
(2)六层电梯逻辑控制仿真及设备用户手册等;
(3)SIMATIC S7-1200使用手册及产品目录。
图1理想速度曲线
在系统的制动段,既要对减速度进行必要的控制,以保证舒适感,又要严格地按电梯运行的速度和距离的关系来控制,以保证平层的精度。在系统的转速降至120r/min之前,为了使两者得到兼顾,采取以加速度对时间控制为主,同时根据在每一制动距离上实际转速与理论转速的偏差来修正加速度给定曲线的方法。
2、方案设计范围
本逻辑控制功能包括:六层电梯的单部电梯基本功能(集选控制、开关门控制、错误指令消除、开门延时/关门保护、待载休眠),单部电梯运行(异常)状态监测(超载保护、终端越程保护、开关门保护、运行保护),集群电梯的群控实现等。并在SIMATIC S7-1200 PLC上完成控制算法组态及SIMATIC WINCC上完成监控环境组态,建立PLC和WINCC之间的通讯连接。
2015年全国大学生西门子杯工业自动化挑战赛设计开发型赛项总决赛赛题
2015年全国大学生西门子杯工业自动化挑战赛设计开发型赛项总决赛赛题2015年全国大学生西门子杯工业自动化挑战赛设计开发型赛项总决赛赛题一、被控对象描述1. 工艺流程所选被控对象为过程工业常见的反应器系统,属于连续反应过程。
反应过程为反应物A、反应物B以及催化剂C发生反应,生成产物D。
反应属于放热反应,由热水加热(夹套)诱发,由冷却水(蛇管)进行冷却。
其工艺流程图(示意图)如下: FV1203FI1203物料BHS1101FI1104物料CFV1201FV1104反应器FI1201PI1201物料ATI1201FV1105HS1102AI1201FI1105LI1201冷却水冷却水FI1202FV1202产物D该连续反应系统以反应物A、反应物B以及催化剂C,在反应温度70.0?下进行反应,反应的产物为D。
反应设备包括:反应器,反应器耐压约1.5MPa。
为了安全,要求反应器在系统开、停车全过程中压力不超过1.2 MPa。
反应过程主要有三股连续进料。
第一股是反应物A,FI1201为进料流量,FV1201是进料阀;第二股是反应物B,FI1203为进料流量,FV1203是进料阀;第三股为催化剂C,FI1104为进料流量,FV1104为进12015年全国大学生西门子杯工业自动化挑战赛设计开发型赛项总决赛赛题料阀门;HS1101为搅拌开关;HS1102为热水加热开关,热水用来诱发反应。
反应器内主产物D重量百分比浓度在图中指示为AI1201,反应温度为TI1201,液位为LI1201。
压力为PI1201。
反应器出口流量为FI1202,由出口阀FV1202控制其流量。
反应器出口为混合液,由产物D与未反应的A、B、C组成。
反应器冷却水入口流量为FI1105,由阀FV1105控制流量。
2. 开车步骤1( 初始化检查,系统处于开车前状态,确认所有阀门处于关闭状态。
2(开FV1203,开始B进料,液位上升。
3(液位上升到50%左右,开FV1201,开始A进料。
2015年西门子杯全国大学生工业自动化挑战赛

2015年西门子杯全国大学生工业自动化挑战赛ITEM2逻辑控制赛项决赛赛题电梯是高层宾馆、商店、住宅、多层厂房和仓库等高层建筑不可缺少的垂直方向的交通工具。
随着社会的发展,建筑物规模越来越大,楼层越来越多,对电梯的调速精度、调速范围等静态和动态特性提出了更高的要求。
目前电梯控制主要由PLC(可编程逻辑控制器)实现,现代的电梯控制除了需要满足基本的载客运货功能,还需要在保证安全的前提下,自动地、智能地制定最优的响应策略、运行速度等。
一、被控对象描述1. 对象模型对象模型分为电梯模型与用户行为模型两项。
电梯三维模型主要包括:电梯整体(包括轿厢、电机、限位开关,等)、各个楼层按钮(上下行呼梯按钮及指示灯,等)、电梯内部设备(轿厢开关门按钮、轿厢选层按钮及指示灯,等)等。
电梯模型采用多部多层结构,其外形及示意图如下所示:图1:电梯模型外形示意图图2:电梯模型原理示意图图3:交流双速电梯拖动系统bfce图4:七段数码管电梯模型中各IO参数均可与PLC通过现场总线相连,实施自动控制。
用户行为模型指软件系统将模拟各楼层出现的用户数量以及每位用户对电梯的操作行为,如每一名用户按下期望到达的目标楼层按钮。
用户行为模型可以模拟现实情况下大量用户使用电梯时的具体用例,从而观察PLC所控制的电梯的行为是否符合要求。
2. 设计参数3. 输入输出数据I O列表详见附录。
二、控制任务1. 单部电梯基本功能根据不同楼层客户需求及时响应,实现自动平层、开关门、超重提示、实现上下限位,层门联锁保护等,并根据不同的需求实现合理的响应。
具体地,应具备如下功能:1)电梯初始化比赛开始时,电梯模型会给出自动运行信号,示意比赛开始,控制程序需要在收到该信号后,进行必要的初始化工作,完成后使电梯位于基站(即一层)待命,并返回准备就绪信号以确认。
2)集选控制集选控制是指在信号控制的基础上把召唤信号集合起来进行有选择的应答。
电梯在运行过程中可以应答同一方向所有层站呼梯信号和轿厢内的选层指令信号,并自动在这些信号指定的层站平层停靠。
全国大学生西门子杯工业自动化挑战赛-item 逻辑控制赛项 工程设拓梦者队计文件
4.1系统选型
S7-1200 控制器使用灵活、功能强大,可用于控制各种各样的设备以满足您的自动化需求。S7-1200 设计紧凑、组态灵活且具有功能强大的指令集,这些特点的组合使它成为控制各种应用的完美解决方案。
CPU 将微处理器、集成电源、输入和输出电路、内置PROFINET、高速运动控制I/O 以
3
下行指示信号
3
控制信号
曳引电机启动信号
3
上行方向接触器
3
下行方向接触器
3
开门继电器
3
关门继电器
3
电梯高速运行
3
电梯低速运行
3
一级制动减速接触器
3
二级制动减速接触器
3
三级制动减速接触器
3
故障指示灯
3
轿内照明
3
风扇
3
启动信号
准备就绪信号
1
合计
95
三、控制系统设计
3.1电梯系统运行
多台电梯对各层全部呼应的综合处理,优先选出电梯及时控制,体现出一种高效,节能,快捷,方便的运作模式。本组是通过乘客按下外呼数量的个数来确定有几个电梯运作载客,具体如下:本次比赛中共有3部电梯联动控制,公用10个外呼按钮,当有1-3个外呼被按下时只有1个电梯运行;当有4-6个外呼被按下时则让2部电梯同时运作;当有7个以上的按钮被按下时则3部电梯同时工作分散客流。
● 新的和改进的CPU:
及板载模拟量输入组合到一个设计紧凑的外壳中来形成功能强大的控制器。 在您下载用户程序后,CPU 将包含监控应用中的设备所需的逻辑。CPU 根据用户程序逻辑监视输入并更改输出,用户程序可以包含布尔逻辑、计数、定时、复杂数学运算以及与其它智能设备的通信。
2015年全国职业技能大赛获奖名单
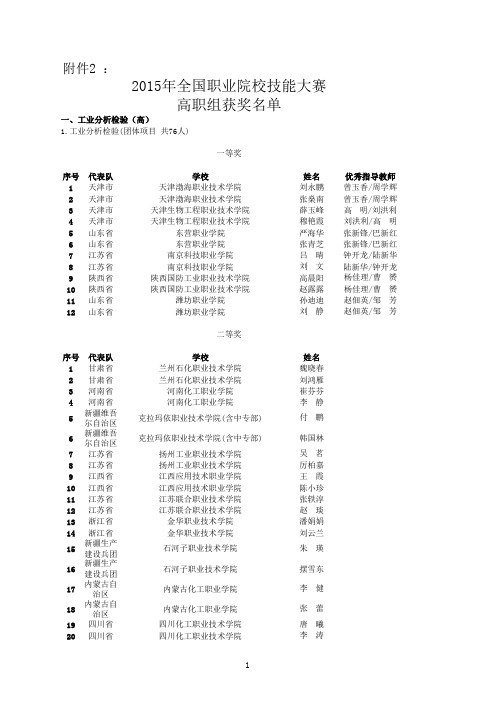
序号代表队学校姓名优秀指导教师1天津市天津渤海职业技术学院刘永鹏曾玉香/周学辉2天津市天津渤海职业技术学院张燊南曾玉香/周学辉3天津市天津生物工程职业技术学院薛玉峰高 明/刘洪利4天津市天津生物工程职业技术学院穆艳霞刘洪利/高 明5山东省东营职业学院严海华张新锋/巴新红6山东省东营职业学院张青芝张新锋/巴新红7江苏省南京科技职业学院吕 晴钟开龙/陆新华8江苏省南京科技职业学院刘 文陆新华/钟开龙9陕西省陕西国防工业职业技术学院高晨阳杨佳理/曹 赟10陕西省陕西国防工业职业技术学院赵露露杨佳理/曹 赟11山东省潍坊职业学院孙迪迪赵佃英/邹 芳12山东省潍坊职业学院刘 静赵佃英/邹 芳序号代表队学校姓名1甘肃省兰州石化职业技术学院魏晓春2甘肃省兰州石化职业技术学院刘鸿雁3河南省河南化工职业学院崔芬芬4河南省河南化工职业学院李 静5新疆维吾尔自治区克拉玛依职业技术学院(含中专部)付 鹏6新疆维吾尔自治区克拉玛依职业技术学院(含中专部)韩国林7江苏省扬州工业职业技术学院吴 茗8江苏省扬州工业职业技术学院厉柏嘉9江西省江西应用技术职业学院王 霞10江西省江西应用技术职业学院陈小珍11江苏省江苏联合职业技术学院张轶淳12江苏省江苏联合职业技术学院赵 琰13浙江省金华职业技术学院潘娟娟14浙江省金华职业技术学院刘云兰15新疆生产建设兵团石河子职业技术学院朱 瑛16新疆生产建设兵团石河子职业技术学院摆雪东17内蒙古自治区内蒙古化工职业学院李 健18内蒙古自治区内蒙古化工职业学院张 蕾19四川省四川化工职业技术学院唐 曦20四川省四川化工职业技术学院李 涛一等奖二等奖附件2 :2015年全国职业院校技能大赛高职组获奖名单一、工业分析检验(高)1.工业分析检验(团体项目 共76人)21广东省深圳职业技术学院解晓双22广东省深圳职业技术学院何彩桥23山东省淄博职业学院宁贞贞24山东省淄博职业学院王芳园25广东省顺德职业技术学院杜佩宁26广东省顺德职业技术学院莫敏夏序号代表队学校姓名1吉林省吉林工业职业技术学院石景元2吉林省吉林工业职业技术学院关健3福建省福建船政交通职业学院李忠毅4福建省福建船政交通职业学院林丽勤5黑龙江省大庆职业学院赵翊丞6黑龙江省大庆职业学院金竹梅7浙江省宁波职业技术学院(高)王立峰8浙江省宁波职业技术学院(高)张微亮9江西省江西现代职业技术学院刘雅琴10江西省江西现代职业技术学院谢莹11重庆市重庆工业职业技术学院谢金真12重庆市重庆工业职业技术学院魏晴13湖南省湖南化工职业技术学院阮秋艳14湖南省湖南化工职业技术学院欧洲15重庆市重庆化工职业学院柘娟16重庆市重庆化工职业学院李居鹏17陕西省陕西工业职业技术学院张咪18陕西省陕西工业职业技术学院鲍海艳19广东省广州工程技术职业学院钟美裕20广东省广州工程技术职业学院唐小燕21湖南省长沙环境保护职业技术学院王智丁22湖南省长沙环境保护职业技术学院贺艳芝23浙江省浙江工业职业技术学院杨琴菲24浙江省浙江工业职业技术学院沈颖25河南省河南工业职业技术学院王霄翔26河南省河南工业职业技术学院张蒙蒙27福建省湄洲湾职业技术学院吴伊晴28福建省湄洲湾职业技术学院吴丽萍29广西壮族自治区广西工业职业技术学院梁云30广西壮族自治区广西工业职业技术学院蒋冬妹31湖北省武汉软件工程职业学院王亚梅32湖北省武汉软件工程职业学院汪思33安徽省安徽水利水电职业技术学院代玉杰34安徽省安徽水利水电职业技术学院王修娣35安徽省安徽医学高等专科学校汪甜36安徽省安徽医学高等专科学校奚娇娇37山西省山西工程职业技术学院申淑霞38山西省山西工程职业技术学院李欢二、楼宇自动化系统安装与调试三等奖1.楼宇自动化系统安装与调试(团体项目 共96人)一等奖序号代表队学校姓名优秀指导教师1浙江省浙江机电职业技术学院高新戎小戈/方忠祥2浙江省浙江机电职业技术学院蓝培杰戎小戈/方忠祥3浙江省浙江机电职业技术学院徐旭文戎小戈/方忠祥4上海市上海电子信息职业技术学院耿国梁熊磊/董莹荷5上海市上海电子信息职业技术学院康韦臣熊磊/董莹荷6上海市上海电子信息职业技术学院张辉熊磊/董莹荷7河南省河南职业技术学院温浩熊新国/韩冬瑞8河南省河南职业技术学院张晨阳熊新国/韩冬瑞9河南省河南职业技术学院李永恒熊新国/韩冬瑞10重庆市重庆工程职业技术学院蔡全兵彭辉/熊飞11重庆市重庆工程职业技术学院陈月友彭辉/熊飞12重庆市重庆工程职业技术学院陈勇坤彭辉/熊飞13北京市北京劳动保障职业学院李宏义张力展/孙玄14北京市北京劳动保障职业学院于琨张力展/孙玄15北京市北京劳动保障职业学院蒋泽晨张力展/孙玄二等奖序号代表队学校姓名1浙江省浙江工商职业技术学院(高)宋扬2浙江省浙江工商职业技术学院(高)许静炳3浙江省浙江工商职业技术学院(高)杨贤培4浙江省浙江建设职业技术学院孙玮5浙江省浙江建设职业技术学院马荣良6浙江省浙江建设职业技术学院黄锋7山东省烟台职业学院王威8山东省烟台职业学院刘志铭9山东省烟台职业学院姜明金10浙江省浙江工业职业技术学院黄佳杰11浙江省浙江工业职业技术学院胡文军12浙江省浙江工业职业技术学院沈涛锋13江苏省常州信息职业技术学院王圣帅14江苏省常州信息职业技术学院赵振宇15江苏省常州信息职业技术学院朱乐16福建省福建船政交通职业学院叶波17福建省福建船政交通职业学院张昌盛18福建省福建船政交通职业学院刘汉强19山东省济南职业学院孟得站20山东省济南职业学院郑鹏21山东省济南职业学院徐畅22安徽省安徽工商职业学院李鑫23安徽省安徽工商职业学院史洪龙24安徽省安徽工商职业学院吴俊25福建省厦门海洋职业技术学院洪静兰26福建省厦门海洋职业技术学院梅小宝27福建省厦门海洋职业技术学院姚振宇28天津市天津城市建设管理职业技术学院张金发29天津市天津城市建设管理职业技术学院周建荣30天津市天津城市建设管理职业技术学院郭彦禄31福建省福建电力职业技术学院陈锦铭32福建省福建电力职业技术学院杨坤林33福建省福建电力职业技术学院沈威敏三等奖序号代表队学校姓名1湖南省湖南机电职业技术学院庞柳涛2湖南省湖南机电职业技术学院廖成龙3湖南省湖南机电职业技术学院张旭明4海南省海南科技职业学院万风5海南省海南科技职业学院孙鸿钦6海南省海南科技职业学院庞正威7江苏省江苏城乡建设职业学院苏文嘉8江苏省江苏城乡建设职业学院顾育豪9江苏省江苏城乡建设职业学院蒋仕城10河南省黄河水利职业技术学院张鑫11河南省黄河水利职业技术学院赵文超12河南省黄河水利职业技术学院王鹏昆13湖南省湖南工业职业技术学院谭庄14湖南省湖南工业职业技术学院肖震宇15湖南省湖南工业职业技术学院邓敏敏16广东省广东建设职业技术学院陈荣欢17广东省广东建设职业技术学院陈仁杰18广东省广东建设职业技术学院林伟鹏19天津市天津轻工职业技术学院杨振伟20天津市天津轻工职业技术学院姚耀东21天津市天津轻工职业技术学院徐广宇22安徽省安徽职业技术学院朱涛23安徽省安徽职业技术学院李鑫24安徽省安徽职业技术学院朱宏路25重庆市重庆工商职业学院魏章胜26重庆市重庆工商职业学院周东27重庆市重庆工商职业学院孙斌斌28重庆市重庆电子工程职业学院赵梓宏29重庆市重庆电子工程职业学院李军30重庆市重庆电子工程职业学院左钊琪31天津市天津中德职业技术学院龚清林32天津市天津中德职业技术学院刘家澍33天津市天津中德职业技术学院金生成34广东省广东机电职业技术学院林盛旭35广东省广东机电职业技术学院黄家飞36广东省广东机电职业技术学院黄崇伟37广东省广东水利电力职业技术学院梁楚泉38广东省广东水利电力职业技术学院梁锐基39广东省广东水利电力职业技术学院林泽凯40福建省福建信息职业技术学院何荣41福建省福建信息职业技术学院许晨晖42福建省福建信息职业技术学院黄辉煌43湖南省湖南城建职业技术学院赖明悦44湖南省湖南城建职业技术学院廖永明45湖南省湖南城建职业技术学院向永波46广西壮族自治区广西机电职业技术学院唐 强47广西壮族自治区广西机电职业技术学院杨 宇48广西壮族自治区广西机电职业技术学院黎 果序号代表队学校姓名优秀指导教师1江苏省淮安信息职业技术学院李 成王 超/王 玲2江苏省淮安信息职业技术学院张 磊王 超/王 玲3天津市天津中德职业技术学院傅卓鑫孙海维/史艳霞4天津市天津中德职业技术学院闫 伟孙海维/史艳霞5山东省潍坊职业学院王 帅王 昌/程义民6山东省潍坊职业学院王加宝王 昌/程义民7北京市北京劳动保障职业学院贾玉晗王 晖/张力展8北京市北京劳动保障职业学院刘 硕王 晖/张力展序号代表队学校姓名1安徽省安徽机电职业技术学院杜全海2安徽省安徽机电职业技术学院许 敏3江苏省常州轻工职业技术学院徐海林4江苏省常州轻工职业技术学院王志全5湖南省湖南机电职业技术学院李想想6湖南省湖南机电职业技术学院何正文7广东省中山职业技术学院王 聪8广东省中山职业技术学院邓登宝9重庆市重庆航天职业技术学院朱 伟10重庆市重庆航天职业技术学院墙可磊11福建省福建信息职业技术学院卓先烨12福建省福建信息职业技术学院陈鹏炜13浙江省浙江建设职业技术学院郑 科14浙江省浙江建设职业技术学院姜志耀15安徽省芜湖职业技术学院徐文强16安徽省芜湖职业技术学院余成林17湖南省湖南电气职业技术学院刘 达18湖南省湖南电气职业技术学院李 磊序号代表队学校姓名1上海市上海电子信息职业技术学院周维鎔二等奖三等奖三、智能电梯装调与维护1.智能电梯装调与维护(团体项目 共52人)一等奖2上海市上海电子信息职业技术学院林子文3河南省河南职业技术学院鹿红伟4河南省河南职业技术学院张 伟5福建省福州职业技术学院陈振俊6福建省福州职业技术学院潘 侃7山东省烟台职业学院王 杰8山东省烟台职业学院赵东坡9广西壮族自治区广西机电职业技术学院吕明晓10广西壮族自治区广西机电职业技术学院张文亮11北京市北京电子科技职业学院张 旭12北京市北京电子科技职业学院郑 昌13江苏省沙洲职业工学院朱 桦14江苏省沙洲职业工学院任洪楼15福建省福建船政交通职业学院钱伟杰16福建省福建船政交通职业学院卢建书17浙江省浙江纺织服装职业技术学院(高)乐 凯18浙江省浙江纺织服装职业技术学院(高)张晨雷19四川省成都纺织高等专科学校成 铭20四川省成都纺织高等专科学校傅之友21陕西省西安航空职业技术学院杨 宇22陕西省西安航空职业技术学院彭良军23天津市天津城市建设管理职业技术学院安博雅24天津市天津城市建设管理职业技术学院符麟汉25天津市天津国土资源和房屋职业学院卢东洋26天津市天津国土资源和房屋职业学院田宏飞序号代表队学校姓名优秀指导教师1浙江省金华职业技术学院陈漪迪张建荣 /张珊珊2浙江省金华职业技术学院方天宇张建荣 /张珊珊3浙江省金华职业技术学院邱伟超张建荣 /张珊珊4浙江省浙江机电职业技术学院周振磊虞建中/钱伊娜5浙江省浙江机电职业技术学院俞舒颖虞建中/钱伊娜6浙江省浙江机电职业技术学院张灵超虞建中/钱伊娜7山东省烟台职业学院朱 义宫晓峰/于仁萍8山东省烟台职业学院张春浩宫晓峰/于仁萍9山东省烟台职业学院王旭辉宫晓峰/于仁萍10江苏省常州机电职业技术学院任 程张一俊/陈学斌11江苏省常州机电职业技术学院陈翰飞陈学斌/张一俊12江苏省常州机电职业技术学院张媛媛陈学斌/张一俊序号代表队学校姓名1重庆市重庆工业职业技术学院谯永清2重庆市重庆工业职业技术学院李 潇二等奖四、工业产品造型设计与快速成型1.工业产品造型设计与快速成型(团体项目 共75人)一等奖3重庆市重庆工业职业技术学院邵雯玥4山东省山东职业学院王闯5山东省山东职业学院罗旭6山东省山东职业学院王永祥7黑龙江省黑龙江农业工程职业学院苑春朋8黑龙江省黑龙江农业工程职业学院李桂良9黑龙江省黑龙江农业工程职业学院郑春雨10江苏省无锡职业技术学院张奕雄11江苏省无锡职业技术学院吴尚明12江苏省无锡职业技术学院檀有敏13天津市天津职业大学张嘉琦14天津市天津职业大学田国强15天津市天津职业大学万水钦16安徽省安徽国防科技职业学院倪玮奇17安徽省安徽国防科技职业学院俞雨彤18安徽省安徽国防科技职业学院张世杰19北京市北京北大方正软件职业技术学院金峰20北京市北京北大方正软件职业技术学院赵博21北京市北京北大方正软件职业技术学院仙非22广东省广东工贸职业技术学院林纯存23广东省广东工贸职业技术学院龙瑶24广东省广东工贸职业技术学院陈奇彬序号代表队学校姓名1湖南省湖南工业职业技术学院李伟2湖南省湖南工业职业技术学院尹艳萍3湖南省湖南工业职业技术学院李翔4四川省四川工商职业技术学院谭伟5四川省四川工商职业技术学院石桐6四川省四川工商职业技术学院汪士凯7福建省福建林业职业技术学院洪鑫裕8福建省福建林业职业技术学院朱培林9福建省福建林业职业技术学院肖志强10吉林省长春职业技术学院赵彬11吉林省长春职业技术学院于永权12吉林省长春职业技术学院张念国13广东省佛山职业技术学院陈沛权14广东省佛山职业技术学院蔡湘慧15广东省佛山职业技术学院郑泽林16广西壮族自治区柳州职业技术学院农新歆17广西壮族自治区柳州职业技术学院黄成志18广西壮族自治区柳州职业技术学院陈晖19黑龙江省黑龙江农业经济职业学院麦哲20黑龙江省黑龙江农业经济职业学院曹宇21黑龙江省黑龙江农业经济职业学院姚明哲22福建省福建船政交通职业学院卓林23福建省福建船政交通职业学院池善果三等奖24福建省福建船政交通职业学院施境煌25湖南省湖南汽车工程职业学院朱磊26湖南省湖南汽车工程职业学院高根东27湖南省湖南汽车工程职业学院龚添宝28北京市北京工业职业技术学院萨其尔29北京市北京工业职业技术学院崔贾海30北京市北京工业职业技术学院舒晨曦31上海市上海工程技术大学高等职业技术学院严鹏飞32上海市上海工程技术大学高等职业技术学院孙聪33上海市上海工程技术大学高等职业技术学院许杨坤34江西省江西现代职业技术学院李明凯35江西省江西现代职业技术学院彭恢臻36江西省江西现代职业技术学院谢华雅37湖北省湖北科技职业学院钟鼎38湖北省湖北科技职业学院汪凡39湖北省湖北科技职业学院汪小波五、注塑模具CAD/CAE与主要零件加工1.注塑模具CAD/CAE与主要零件加工(团体项目 共84人)一等奖序号代表队学校姓名优秀指导教师1天津市天津轻工职业技术学院赵志鹏史清卫/王称2天津市天津轻工职业技术学院张育胜史清卫/王称3天津市天津轻工职业技术学院崔安史清卫/王称4山东省山东职业学院栾堃鹿洪荣/尚新娟5山东省山东职业学院李健鹿洪荣/尚新娟6山东省山东职业学院瞿守超鹿洪荣/尚新娟7浙江省杭州科技职业技术学院韩喆程文/罗晓晔8浙江省杭州科技职业技术学院金鹏飞程文/罗晓晔9浙江省杭州科技职业技术学院魏银川程文/罗晓晔10江苏省无锡职业技术学院臧清扬曹秀中/李坤11江苏省无锡职业技术学院陈培龙曹秀中/李坤12江苏省无锡职业技术学院董凌晨曹秀中/李坤13北京市北京工业职业技术学院秦春花孙铁城/张文兵14北京市北京工业职业技术学院杨忠岩孙铁城/张文兵15北京市北京工业职业技术学院孙昊伦孙铁城/张文兵二等奖序号代表队学校姓名1山东省烟台工程职业技术学院曲成润2山东省烟台工程职业技术学院武栋3山东省烟台工程职业技术学院原文韬4湖南省湖南机电职业技术学院阳经武5湖南省湖南机电职业技术学院蔡永平6湖南省湖南机电职业技术学院杨斌星7浙江省浙江机电职业技术学院洪江波8浙江省浙江机电职业技术学院闫明明9浙江省浙江机电职业技术学院赵余策10辽宁省辽宁装备制造职业技术学院刘福来11辽宁省辽宁装备制造职业技术学院孙欣12辽宁省辽宁装备制造职业技术学院牟金科13湖南省湖南工业职业技术学院周杰14湖南省湖南工业职业技术学院彭智15湖南省湖南工业职业技术学院罗崇辉16江苏省常州机电职业技术学院刘军陈17江苏省常州机电职业技术学院谭国强18江苏省常州机电职业技术学院张彤19福建省福建信息职业技术学院谢建春20福建省福建信息职业技术学院毛羽丰21福建省福建信息职业技术学院王德海22湖北省襄阳职业技术学院(原襄樊职业技术学院)王子茂23湖北省襄阳职业技术学院(原襄樊职业技术学院)张翔宇24湖北省襄阳职业技术学院(原襄樊职业技术学院)章振25重庆市重庆工业职业技术学院雷扬旭26重庆市重庆工业职业技术学院贾煜27重庆市重庆工业职业技术学院虞童序号代表队学校姓名1广东省佛山职业技术学院汤树钦2广东省佛山职业技术学院陈志恒3广东省佛山职业技术学院赵柏湖4安徽省安徽机电职业技术学院燕玉龙5安徽省安徽机电职业技术学院周亮6安徽省安徽机电职业技术学院范群征7福建省福建林业职业技术学院吴志洋8福建省福建林业职业技术学院辛猛斌9福建省福建林业职业技术学院林枭10安徽省安徽水利水电职业技术学院周国正11安徽省安徽水利水电职业技术学院陈琦12安徽省安徽水利水电职业技术学院张亚飞13北京市北京电子科技职业学院陈肖14北京市北京电子科技职业学院姜辉15北京市北京电子科技职业学院蔚福菫16山西省山西机电职业技术学院赵玄17山西省山西机电职业技术学院杜家华18山西省山西机电职业技术学院张锦涛19河南省河南工业职业技术学院何东方20河南省河南工业职业技术学院桑飒21河南省河南工业职业技术学院冷毅杰22上海市上海工程技术大学高等职业技术学院倪嘉伟23上海市上海工程技术大学高等职业技术学院施文龙24上海市上海工程技术大学高等职业技术学院沈浩25广西壮族自治区柳州职业技术学院梁沛26广西壮族自治区柳州职业技术学院陈昌胜27广西壮族自治区柳州职业技术学院梁祖严三等奖28天津市天津职业大学粟汝温29天津市天津职业大学凌全30天津市天津职业大学柴小飞31黑龙江省黑龙江农业经济职业学院杨京32黑龙江省黑龙江农业经济职业学院赵德成33黑龙江省黑龙江农业经济职业学院薄凤雷34辽宁省沈阳职业技术学院钱立波35辽宁省沈阳职业技术学院吴天昊36辽宁省沈阳职业技术学院李金霖37湖北省武汉城市职业学院胡学谦38湖北省武汉城市职业学院杨欢39湖北省武汉城市职业学院严映宏40四川省成都航空职业技术学院陈中阳41四川省成都航空职业技术学院庞阳42四川省成都航空职业技术学院陈亮六、自动化生产线安装与调试1.自动化生产线安装与调试(团体项目 共92人)一等奖序号代表队学校姓名优秀指导教师1山东省山东职业学院谭云龙赵振/赵秀华2山东省山东职业学院凌浩赵振/赵秀华3江苏省沙洲职业工学院周振兴李志梅/赵媛媛4江苏省沙洲职业工学院张少东李志梅/赵媛媛5天津市天津中德职业技术学院徐艳王青云/温国强6天津市天津中德职业技术学院高鹏王青云/温国强7山东省潍坊职业学院盖汉卿解永辉/徐刚8山东省潍坊职业学院刘鹏解永辉/徐刚9山东省烟台职业学院郝文彬刘晓磊/张海丹10山东省烟台职业学院陈诗尚刘晓磊/张海丹11北京市北京电子科技职业学院庞宇擎马冬宝/朱运利12北京市北京电子科技职业学院李仲男马冬宝/朱运利13安徽省安徽职业技术学院叶桂林常辉/余搏立14安徽省安徽职业技术学院吴晋阳常辉/余搏立15江苏省南京工业职业技术学院顾宏飞丁加军/彭换新16江苏省南京工业职业技术学院庄刘庆丁加军/彭换新二等奖序号代表队学校姓名1山东省日照职业技术学院杜明飞2山东省日照职业技术学院江秀涛3北京市北京工业职业技术学院刘斌4北京市北京工业职业技术学院王誉博5湖南省湖南电气职业技术学院易双胜6湖南省湖南电气职业技术学院肖金旦7江苏省常州纺织服装职业技术学院王洪兵8江苏省常州纺织服装职业技术学院杨必奎9福建省福建电力职业技术学院李鸿源。
全国大学生西门子杯工业自动化挑战赛ITEM2逻辑控制赛项样题高校组
全国大学生西门子杯工业自动化挑战赛ITEM2逻辑控制赛项样题高校组近年来,工业自动化领域的发展越来越受到人们的关注。
为了培养优秀的工业自动化人才,提高我国工业自动化技术水平,西门子公司举办了全国大学生西门子杯工业自动化挑战赛。
其中,ITEM2逻辑控制赛项是该赛事中的重要环节,对于参赛选手来说,这是一次展示自己技术能力的绝佳机会。
ITEM2逻辑控制赛项样题要求参赛选手在规定时间内,设计并实现一个自动化控制系统。
参赛选手需要运用所学的理论知识,结合实际情况,规划动作流程并编写控制程序。
在比赛过程中,选手需要面对各种可能出现的问题,进行调试和修正,使得整个系统能够稳定运行。
这不仅对参赛选手的技术能力提出了较高的要求,也考验了他们的团队合作和解决问题的能力。
逻辑控制是工业自动化领域中的一项核心技术,它通过对输入信号进行逻辑运算和判断,对输出信号进行控制,实现对工业过程的自动化控制。
在现代工业生产中,逻辑控制技术广泛应用于各种自动化设备和生产线,能够有效提高生产效率,减少人力和物力资源的浪费。
因此,掌握逻辑控制技术对于工业自动化人才来说非常重要。
在ITEM2逻辑控制赛项中,选手所面临的挑战不仅仅是设计一个系统,更重要的是要考虑到系统的可靠性和稳定性。
在现实生产环境中,往往会出现各种干扰因素和故障,例如电压波动、传感器故障等,这些都可能对系统的正常运行产生影响。
因此,选手需要在设计控制系统时充分考虑到这些问题,并采取相应的措施来保证系统的鲁棒性。
同时,选手在比赛中还需要具备一定的创新能力。
虽然赛题给出了明确的要求和指导,但选手也可以在此基础上进行改进和创新。
他们可以优化控制算法,提高系统的响应速度和精度;他们可以设计智能化的控制策略,使系统能够自动调整参数和适应不同的工况;他们还可以通过与其他团队的合作,共同解决问题和互相学习,推动自动化技术的发展。
总之,全国大学生西门子杯工业自动化挑战赛ITEM2逻辑控制赛项样题是对参赛选手技术能力和团队合作能力的全面考察。
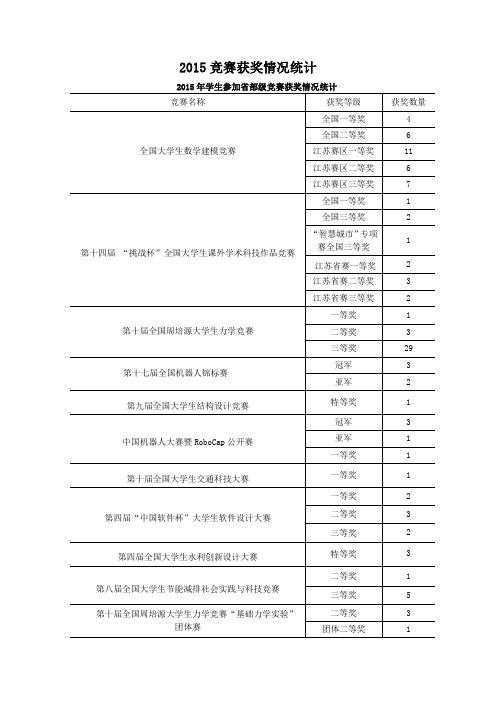
2015竞赛获奖情况统计
1
全国三等奖
1
华东赛区特等奖
3
华东赛区一等奖
3
“创新创业杯”全国管理决策模拟大赛
特等奖
1
二等奖
8
全国高等院校企业竞争模拟大赛
特等奖
1
一等奖
1
二等奖
2
全国大学生创业综合模拟大赛
二等奖
1
第六届全国大学生数学竞赛
全国二等奖
1
省一等奖
20
省二等奖
33
省三等奖
23
第六届中国大学生服务外包创新创业大赛
三等奖
1
全国大学生英语竞赛
全国三等奖
1
江苏赛区特等奖
2
江苏赛区一等奖
16
江苏赛区二等奖
46
江苏赛区三等奖
88
第一届全国高校云计算应用创新大赛
二等奖
2
第六届“蓝桥杯”全国软件和信息技术专业人才大赛
全国选拔赛创业团队赛一等奖
1
全国选拔赛创业团队赛二等奖
2
全国总决赛创业团队赛二等奖
1
全国二等奖
13
全国三等奖
2
江苏赛区一等奖
4
江苏赛区二等奖
6
江苏赛区三等奖
1
第七届全国大学生广告艺术设计大赛
全国三等奖
2
省一等奖
1
省二等奖
2
省三等奖
7
第九届江苏省大学生力学竞赛
特等奖
6
一等奖
56
二等奖
91
团体特等奖
1
第九届江苏省大学生力学竞赛“基础力学实验”团体赛
特等奖
2
一等奖
1
【推荐下载】第九届全国大学生“西门子杯”工业自动化挑战赛完美收官
张小只智能机械工业网张小只机械知识库第九届全国大学生“西门子杯”工业自动化挑战赛完美收官 2015年8月25日,第九届全国大学生西门子杯工业自动化挑战赛在北京交通大学完美收官。
大赛由教育部、西门子和我国系统仿真学会联合主办。
本届大赛历时8个月,共吸引了超过1500支参赛队、近7000人参赛,覆盖全国230多所院校。
来自北京交通大学、上海工程技术大学、上海海事大学、太原理工大学、陕西理工学院、东北大学秦皇岛分校、铜陵学院、我国计量学院、黑龙江八一农垦大学、安徽工程大学共10所学校的10个代表队获得了逻辑控制赛项特等奖;来自北京科技大学、上海海事大学、长春理工大学、烟台大学、铜陵学院共5所学校的5支代表队获得了运动控制赛项特等奖;来自北京联合大学、我国石油大学(华东)、桂林理工大学、青岛理工大学、安徽工业大学、西安邮电大学共6所学校的7支代表队获得了设计开发赛项特等奖;来自烟台大学的代表队获得了工程创新赛项特等奖。
全国大学生西门子杯工业自动化挑战赛由教育部高等学校自动化专业教学指导委员会、西门子(我国)有限公司以及我国系统仿真学会联合主办,它也是在西门子与教育部签署的《教育合作备忘录》框架下举办的工程人才培养活动之一。
大赛主要面向全国自动化和机电一体化相关专业大学生和高职高专在校学生,旨在激发学生在实用性技术方面的应用能力和创新活力,并为我国培养和输送更多优秀的创新型工程人才。
《我国制造2025》是未来十年我国实施制造强国战略的行动纲领。
创新是我国建设制造强国的灵魂,而人才培养则是建设制造强国的根本。
自2006年起大赛已成功举办了9届,而今年首次将去年的4项赛项设置增加至5项,分别为逻辑控制、设计开发、工程创新、运动控制以及硬件研发,以便从更广的专业维度激发学生的科技创。
2016年全国大学生西门子杯工业自动化挑战赛ITEM3运动控制赛项样题

2016年西门子杯全国大学生工业自动化挑战赛ITEM3运动控制赛项样题一、赛项介绍运动控制赛项主要面向自动化、机电一体化、装备制造等专业方向的参赛选手,着重于参赛选手运动控制系统方面能力的培养。
本赛项通过实际使用运动控制设备完成规定控制任务并结合现场答辩的方式,来着重考察参赛选手对运动控制系统理论知识的掌握程度和灵活运用的能力,以及对于典型运动控制系统实际调试的熟练程度。
本赛项所采用的运动控制器为实际生产中广泛采用的西门子SIMA TIC 315T控制器,驱动部分则采用了通用性强、性能出众的SINAMICS S120系列驱动产品。
这两者的结合使用,可轻松满足运动控制系统对响应速度、定位精度、同步精度等方面内容的要求。
本赛项分为初赛和决赛两个环节。
其中,初赛环节采用完成不同规定任务的方式进行比赛,该环节着重考查参赛选手运动控制系统的基本调试能力。
决赛环节控制对象为一经过抽象后的实际生产设备,控制方案需要参赛选手根据控制要求自行设计,该环节要求选手不仅仅具备驱动器的调试能力,还需要具备一定的方案设计和控制程序编写能力。
决赛环节还设置了笔试环节和方案答辩环节,在这两个环节中,会对参赛选手的运动及控制理论基础知识及其系统分析和程序设计的思路进行考查,从而更好的反映出参赛选手的综合素质。
二、运动控制系统描述1. 设备组成运动控制系统主要由电气箱(运动控制器、控制单元、整流单元、电机模块、变压器、手操盒等)与被控对象(伺服电机、减速箱、同心圆盘对象包、物料卷绕对象包)组成。
2. 设备清单2.1 控制系统设备清单:2.2调试软件及硬件:STEP 7 V5.5可编程控制器调试软件S7-Technology V4.2 T系列可编程控制器调试软件STARTER运动控制器调试软件WinCC Advacnced v13或更高版本人机界面组态软件调试用计算机、通讯电缆与测量仪器2.3 对象模型清单:带刻度圆盘大、小各一个圆盘用同步带两根铝质安装背板物料卷绕对象包3. 对象模型描述对象模型- 同心圆盘共一大一小两个圆盘,各由一部电机驱动。
【推荐下载】2015年全国大学生工业自动化挑战赛正式开赛

张小只智能机械工业网
2015 年全国大学生工业自动化挑战赛正式开赛
16 日,在太原理工大学迎西校区电气与动力工程学院,2015 年全国大学生西门子杯工业自动化挑战赛西部赛区正式开赛,来自西部多所高校的70 余名工科学子将参加为期两天的竞赛。
70 余名异校大学生
上午8 点30 分,走进电机馆3 层实验室,参赛队员正在紧张有序的进行着比赛,此次比赛,共分为两个赛项,一个是在数字化工厂大学生实践创新基地进行的ITEM1 设计开发赛项,另一个是实验室进行的ITEM2 逻辑控制赛项。
大赛组委会充当甲方角色,而参赛队伍以团队的形式充当乙方角色,通过多个
实际环节来完成竞赛,并且参赛队伍需要在真实的工业控制器和仿真的工业对象环境
下完成全部的自动化工程项目,以实际控制效果来决定名次。
据了解,当天初赛的学生是从136 人中通过投标书选拔出来的70 余人,经过初赛最后选出20%40%的学生进入决赛。
全国大学生西门子杯工业自动化挑战赛是由教育部、西门子(我国)有限公
司、我国系统仿真学会联合主办的,是在2006 年创办,并已成功举办八届。
今年3 月19 日,经第一次组委会会议投票决定由太原理工大学承办西部赛区的比赛,同时也是该校参加的第三届比赛。
而且,目前大赛已经将竞赛组扩展为工程应用型、设计开发型和工程创新型3 类,分别针对应用型工程师、开放型工程师和研发型工程师进行人才培养的引导。
提供实践平台
大赛相关负责人王静静表示,此项大赛并不是简单地提供一个供院校之间进行张小只机械知识库。
西门子”杯自动化挑战赛

关于报名参加2015年全国大学生“西门子”杯自动化挑战赛的通知各学院(部门):2015年全国大学生“西门子杯”工业自动化挑战赛已经启动。
为了更好培养我校学生的科技创新意识,提高他们的团队协作和工程实践能力,顺利有序的开展这项活动,请相关学院(部门)做好本次赛事的组织、宣传工作,动员优秀学生积极参加,现将相关报名事宜通知如下:一、竞赛简介全国大学生"西门子杯"工业自动化挑战赛是由教育部高等学校自动化类专业教学指导分委员会(以下简称"自动化教指委")、西门子(中国)有限公司(以下简称"西门子")和中国系统仿真学会(以下简称"仿真学会")联合主办的,以模拟典型工业自动化系统为对象的工程科技竞赛,是面向全国自动化、机电一体化相关专业大学生和高职高专学生的一项创新性科技活动。
根据2011年2月由教育部与西门子(中国)有限公司签署的合作备忘录规定,本项大赛是教育部认可的大学生竞赛活动之一,并得到了教育部质量工程的资助。
二、参赛对象参赛对象仅限于普通高等学校在校全日制学生。
以参赛队为基本单元,每支参赛队不超过 3 名参赛选手,每支参赛队最多允许1名研究生参赛。
每名学生只能参加一支参赛队,每支参赛队只能在三个竞赛组中选择一项参加。
三、竞赛安排1、比赛形式该比赛学校不组织校内预赛,请自行通过大赛官网()报名、查看赛题及赛事安排。
2、选题本次竞赛将分设三个组别,分别为工程应用型赛项、设计开发型赛项和工程创新型赛项。
其中,工程应用型对象为电梯控制,主要由PLC(可编程逻辑控制器)实现,面向自动化工程应用能力的培养。
参赛队伍提交技术方案后获得参赛资格。
初赛采取裁判制,由计算机评分软件自动打分;评分规则由专家组制定并事先公布。
工程创新型赛项对象为西门子LOGO!控制器进行开发。
更多相关资料请参见大赛官方网站:3、选择指导教师设计开发型竞赛组和工程应用型竞赛组,每支队伍设指导教师1名。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2015年全国大学生西门子杯工业自动化挑战赛ITEM3运动控制赛项获奖名单西门子大赛秘书处,2015年08月26日
2015年全国大学生西门子杯工业自动化挑战赛ITEM3运动控制赛项获奖名单
学校赛队名称奖项
长春理工大学天马行控队特等奖
北京科技大学会飞的蜗牛特等奖
烟台大学奔跑者特等奖
铜陵学院三位同学特等奖
上海海事大学VCC 特等奖
三峡大学NO.1 一等奖
中国石油大学(华东)蓝色风暴一等奖
西南科技大学268工程一等奖
天津工业大学天津工大
奋进2队
一等奖
厦门大学Mr.Victory 一等奖陕西理工学院志远队一等奖
东北大学秦皇岛分校西门子运动
控制三人组
一等奖
重庆工商大学冲上云霄一等奖哈尔滨工程大学北极星一等奖东莞理工学院三人行一等奖安徽工业大学扬帆远航二等奖广西大学行健文理学院蚂蚁蜜蜂蜗牛二等奖西安邮电大学 E.motion 二等奖上海应用技术学院CX~吹雪二等奖马鞍山职业技术学院同路人二等奖青岛科技大学远航队二等奖
阜阳师范学院阜师启航者二等奖同济大学TJ666 二等奖上海第二工业大学胖瘦团二等奖中国矿业大学HCZ 二等奖苏州职业大学能源之星二等奖
山东科技大学山东科技大学
飞Young队
二等奖
中国计量学院海阔天空二等奖桂林理工大学rock_king 二等奖哈尔滨工业大学HITServo 二等奖南京工程学院极速前进二等奖天津中德职业技术学院开拓者队二等奖南阳理工大学对不二等奖湖北汽车工业学院青春无限二等奖河北工业大学河工假日二等奖燕京理工学院top 二等奖
兰州理工大学黄河水车
梦之队
三等奖
河南理工大学智联队三等奖广西大学eagle 三等奖重庆科技学院泛海之舟三等奖郑州轻工业学院IF 三等奖齐鲁工业大学水之牙三等奖西安工业大学西工致远创新队三等奖福建工程学院突击队三等奖宁波工程学院宁工之力三等奖南昌航空大学未来之光三等奖
安徽国防科技职业学院国防3队三等奖
皖西学院开拓者三等奖
新余学院开拓者队三等奖
北京交通大学缤纷小组三等奖
东北农业大学画蝶三等奖
1. 参赛队员及指导教师证书将由组委会统一邮寄,具体安排信息将于近期公布
2. 如有其它疑问,请于大赛秘书处联系!。