热工自动化[1]
浅议热工电力自动化技术
建材发展导 向 2 0 1 3 年 1 月
浅议热工 电力 自动化技术
武 瑞 芳
陕西 清 水 川 发 电 有 限 公 司设 备 部 7 1 9 4 0 0
摘
要: 总体 来讲 , 热 工 自动化 系统 的发展趋 势是 高速化 、 智 能化、 一体 化和透 明化 。 对故 障信 息的研 究和充分利 用是
发掘热 工故 障诊 断与 故障预测 的基础 , 现场 总线的应 用, 为热工 自动化 系统的进一步 发展提供 了不断拓展 的空间。
关键词 : 电力 ; 热工 ; 自动 技 术 ; 系 统 优 化
引言
控制技术等高新技术应用于高压输 电系统 , 以提高系统可靠性 、 随着计算机技术的快速发展 ,发 电厂 电气控制纳入D C S监 可控性 、 运行性能和 电能质量 , 并可获取大量节 电效益的新型综
2 . 3 合理 设计
根究底还是 因为建筑施工单位安全责任意识不足及建筑监管力度
设计 图纸 不 详 或者 设 计 考 虑 不周 到 , 往往 造 成 不 必 要 的 质量 不足等。 而要从根本上解决这些 问题 , 一方面需要提高建筑施工
问题 。 在设计 图纸考虑欠周这方面造成的质量通病 问题 ,在当前 方的安全责任意识 , 并提高其操作水平和施 工规 范 , 另一方面 , 房 屋建 筑工程 中, 占有相 当的 比率 。 工程技术人 员要切 实做好 工 还要 建立相关的监督管理制度 , 坚定 的执 行。 最终提高房屋建筑 程 质量分 析工作 , 系统研 究 。 由于设计欠佳而 可能 引起 工程 质量 质 量 , 避免以上通病 的发生 , 建 设 更 多百 姓 满 意 的 房 屋 工程 。 通病 问题 要进行认真 的研 究 , 合理 改进 。 在工程设计方面我 们着 参考 文献
DL701火力发电厂热工自动化术语
☿থϹॖ⛁ᎹႮࡼ࣪ᴃ᪱DL/T701-1999থᜬᯊⒸ:2002-1-15Ё ढҎ ⇥ ݅ Ϲ ᜐ Ϯ ᷛ ޚথϹॖThermopower automation-vocabularyfor fossil fired power plant2000-02-24থᏗ2000-07-01ЁढҎ⇥݅ᆊথᏗࠡᣄϹᎹϮᾬ[1995]44ϹᜐϮᷛޚᩥՈᅝՈDŽˈ៥☿থϹॖՈৡDŽϵՈᆊˈּՈৡˈˈᕜDŽЎ┉ǃݙՈѸˈᔶՈᩨˊˈේᷛޚDŽᷛޚՈЁ“Ҿᜬ”ՈᾬGB/T13983-92GB/T13283-91ՈᴵDŽ ᷛޚՈ┈AՈ┈DŽᷛޚϵϹᎹϮᾬᷛޚ࣪DŽ ᷛޚ᰻˖ЁϹᴎЁᖗDŽ ҎDŽ ϹᎹϮᾬᷛޚ࣪DŽֲࠡ ᇇᓩϬᷛޚᴀᴃ☿থϬᴃ┈$˄ᦤ߾Ո┈˅ ᆵᴀᷛޚᢈথϬՈᴃˈৃᩥǃᅝǃˊᮍՈ᭛ӊϬ᪱DŽϟ߫ޚ᠔Ոᴵ᭛ˈỞᴀᷛޚЁϬ໐ᵘ៤ᴀᷛޚՈᴵ᭛DŽᴀޚߎČᯊˈ᠔߾ČᴀഛDŽ᠔ޚ῁ˈՓϬᴀᷛޚՈϬϟ߫ޚ᳔ᴀՈৃDŽ*ˋ7 ü Ꮉ⌟ₓࠊϬẔ⌟Ҿᜬᰒ߾Ҿᜬஂܲᑺ൫ *ˋ7 ü Ҿ఼Ҿᜬᴀᴃˊ Ⴎ D₋ϬẔ⌟ϢࠊிඣˈᇍϣˈҹҷՈᮑDŽᇍ☿থˈᰃϣথࠊՈᘏDŽϔѯĀҾᜬϢࠊā Lˈ , DŽˊ ˊ ⛁ D₋ϬẔ⌟Ϣࠊிඣᇍ☿থՈ⛁ϣˈҹҷՈᮑDŽˊ ˊ Ϲ H D₋ϬẔ⌟Ϣࠊிඣᇍ☿থՈথˈҹҷՈᮑѠ V GD DŽˊ ˊ ẋ S D₋ϬẔ⌟ϢࠊிඣᇍϣˈҹҷՈᮑDŽ ˊ ˊ ܼ Z S Dᭈਃࡼǃ᫇ǃذᴎϢˊঞՈₑਃࡼ᪡ˊ ˊ ֕ PᢆඣঞՈẔখ᭄ঞˈҹܲখ᭄źˈẔߎϡখ᭄źDŽЏ⌟ₓிඣՈϔϾবₓᑊᇚᝯ⌟ؐϢؐՈDŽˊ ˊ ֕ VᇍϣՈ֕ࠊDŽ◄ᯊˈẜࣙՈᅝᡸ᪡DŽ ˊ ˊ ▊ඣF G P V▊ඣϵ఼ǃবễ఼ঞᩥਜ਼ᴎϢՈඈ៤ˈᰃϔⒸᭈՈ᠔Ոখ᭄▊ࠊ֜ ৄ ϞՈҾᜬ& খᢅ ˊ ˊ ˊ Ϟ߾ˈҹ֓ؐʱˊᇍϣࠊDŽˊ ˊ ிඣᎹ HிඣᎹඣՈֲՈˈ໐ᇍிඣᇍᬥᵘ៤ǃඈᵘǃǃࠊᴎᵘẟ᪂ᩥՈDŽϔՈࠊᇍᬥඣˈϬᑊՈඈ៤ՈՈ᳝ᴎᭈDŽ໐ඣᴀẜᰃՈϔϾඣՈඈ៤DŽˊ ⌟ₓϢᜬ P D G Lˊ ˊ ⌟ₓ PҹܲₓؐЎՈՈ᪡DŽˊ ˊ >⌟Ո@ₓ >@TৃᅮₓܲՈϔᬥˈЎՈˊ ˊ >ₓ@ؐ Y > D @ϬϔϾ᭄ϔϾᔧՈ⌟ₓᜬ߾Ոₓˈབ Pǃ ǃϔ DŽ ˊ ˊ বₓ Y݊ؐৃব⌟ߎՈₓźDŽˊ ˊ বₓ L Y఼ҾᜬՈবₓDŽˊ ˊ ߎবₓ R Yϵ఼ҾᜬߎՈবₓDŽˊ ˊ ᝯ⌟বₓ P G Y⌟ₓՈবₓDŽᝯ⌟বₓỞ⏽ᑺǃǃₓǃᑺDŽ ˊ ˊ ᝯ⌟ؐ P G YᢈᴵӊՈⒸˈϵ⌟ₓញՈˈᑊҹ᭄ؐ⌟ₓᜬ߾Ոₓؐˊ ˊ >఼ҾᜬՈ@߾ؐ L GL> D P L@ Ҿ఼Ҿᜬ᠔Ոᝯ⌟ₓՈؐDŽˊ ˊ >ₓؐ@ףؐ W Y> D @ᜬ߾ℷₓᯊ᠔ᴵӊϟՈₓՈؐDŽ⊼˖ₓՈףؐᰃϔϾˊˈϔޚܲՈˈỞϬףؐᴹףؐDŽˊ ˊ >ₓՈ@൪ףؐ F W Y > D @ ЎϔᅮՈৃҹҷףؐՈₓؐDŽ⊼˖ ˊϔˈףؐᝯףؐՈˈᇍѢϔᅮՈϬˈؐৃᩥDŽˊϔϾₓՈĀףؐāˈϔϬՈஂܲᑺՈҾᜬᮍDŽˊ ˊ Hᝯ⌟বₓՈᝯ⌟ؐף᭄ؐDŽ⊼˖ ˊᔧ⌟ؐףؐᯊˈ˙⌟ؐϔףؐDŽˊᔧᜬញՈ᭄ߎᯊˈᖙᜬញՈޚDŽˊ ˊ ߾ؐ H R L GL ҾᜬՈ߾ؐ⌟ₓՈ ףؐDŽ ˊ ˊ ᓩϬ GX HҾᜬՈ߾ؐҹᢈؐˈᑊҹ᭄ᜬ߾DŽˊ ˊ ᇍ HҾᜬՈ߾ؐҹᝯ⌟ₓՈ ףؐˈᑊҹ᭄ᜬ߾DŽˊ ˊ ᴀ L Hখ↨ᴵӊϟҾᜬՈ߾ؐDŽˊ ˊ ޚ ஂ ܲᑺ DҾᜬ߾ؐϢ⌟ₓ ףؐՈϔᑺDŽˊ ˊ ޚ ஂ ܲᑺ൫ D FҾᜬޚ ஂ ܲᑺՈ൫DŽˊ ˊ VᢈՈᎹᴵӊϟˈҾᜬញᢈᯊⒸݙবՈ࿁DŽ ˊ ˊ Ẕ⌟Ҿᜬ P L⌟ₓՈҾᜬDŽҹᰃবễ఼ǃӴ఼Ⴎߎӊᰒ߾ញՈҾᜬDŽˊ ˊ Ẕߎӊ VˈGH GHߎ఼ˈ᳝ᯊӊDŽָ⌟বₓˈᑊᇚḰᤶ⌟ₓՈՈӊ఼ӊDŽবₓẔߎӊߎⒸՈ݇ՈˈϡবDŽ ˊ ˊ Ӵ఼ W GXᛳ⌟ₓˈᑊϔᅮᇚ݊ḰᤶՈߎₓՈҾᜬDŽ ᳝ՈӴ఼ˈˊɴᬥՈᗻՈˈབ˖⏽ᑺӴ఼ˈǃᑺǃᑺǃᑺӴ఼ˈₑₓǃǃ఼ˈ఼DŽˊ ˊ বễ఼ WߎᷛޚՈӴ఼DŽবễ఼ৃˈབ˖⏽ᑺবễ఼ǃবễ఼ǃবễ఼ǃₓবễ఼ǃবễ఼ǃবễ఼ǃবễ఼ǃḰợবễ఼ǃϹবễ఼ǃবễ఼DŽˊ ˊ বễ఼V Wញᖂˊ఼Ոবễ఼ˈৃᇍ⌟ₓؐẟ᭄ˊ ࣙ ˈߎޚᢳˋ᭄ˈႮՈবễ఼DŽ ˊ ˊ ᩥ ᜬ P⌟ₓ߾ᝯ⌟ؐՈញDŽϔϬ᭄߾খ᭄ؐՈࢴĀᜬāDŽ ᩥ ᜬ Ϭˈབ⌕ₓᩥǃ⏽ᑺᩥǃᜬDŽ ˊ ˊ ᰒ߾ҾᜬGL Lᰒ߾ ߾ǃ ᝯ⌟ₓؐՈҾᜬDŽˊ ˊ ߾Ҿᜬ L GLˈL GL L߾ᝯ⌟ₓؐ݊݇ؐՈᰒ߾ҾᜬDŽˊ ˊ ᜬ U GHˈU GL L⌟ₓؐ݊݇ؐՈᰒ߾ҾᜬDŽˊ ˊ ᜬ L LᯊⒸˈ῁߾ϔᢈᯊⒸࠄ᭄ᯊⒸՈᝯ⌟বₓᩥؐՈᰒ߾ҾᜬDŽˊ ࠊ FᇍϣՈ᪂ ǃǃϹᴎǃϹࠊӊ ẟՈ ᓔǃ݇ǃਃǃذ DŽˊ ˊ ႮࠊD FⒸࠊӊՈࠊDŽˊ ˊ ࠊ P Fϵᴎᴎᵘ݊ࠊӊՈࠊDŽ ˊ ˊ ᓔɳࠊ R O FߎবₓϡᴀࠊϬՈࠊDŽᢳᓔɳࠊˈẜ᳝ࠊ݊DŽˊ ˊ ࠊ ࠊ F G O FࠊϬবₓՈࠊDŽˊ ˊ ᅮؐࠊ F Z G VüSࠊDŽՓবₓֱᴀՈࠊDŽˊ ˊ বᅮؐࠊF Z Y VüSՓবₓՈᅮؐব࣪ՈࠊDŽˊ ˊ ࠡࠊ G G FᇚϔϾᇍᝯবₓՈźՈḰᤶҹՈ┈ϬՈࠊDŽ ࠊϬՓবₓϢؐՈDŽℸϬৃᮑᓔɳࠊϞDŽˊ ˊ ൫ࠊ F GH FЏࠊ఼ՈߎবₓᰃϔϾࠊ఼Ոখ↨বₓՈࠊDŽ ˊ ˊ ࠊ WüS FՈব࣪ˈߎᓔ݇ϸՈࠊDŽ ˊ ˊ எࠊ FᇚՈஂܲₓḰஎₓˈஎˊˈߎஂܲₓՈࠊDŽˊ ˊ Ⴎࠊ D GD F₋ϬႮՈᮍবࠊᢈ ᪂খ᭄ˈҹࠊிඣᗻՈࠊDŽˊ ˊ ᳔ࠊ R FᢈՈᑺϟˈՓՈࠊDŽˊ ˊ Ⴎࠊ VüW FᇍẋՈᔧՈ᳔ՈᗻˈႮࠊ఼ᭈখ᭄ՈࠊDŽˊ ˊ ࠊ O FỞᓔ݇ₓᓔ݇ₓߎՈࠊDŽˊ ˊ ࠊ V FϔϔிՈࠊDŽˊ ˊ ᭄ָࠊ GL GL F ''Ϭᩥਜ਼ᴎҷࠊ఼ঞࠊញˈָᇍϣՈࠊDŽ᭄ָࠊᰃᩥਜ਼ᴎࠊՈ ϔˈϔ൫ᩥਜ਼ᴎࠊிඣՈϔ൫ˈϬᖂൟᩥਜ਼ᴎᖂˊ఼ᴹ˗ᩥ ਜ਼ᴎᩥਜ਼᪂ඣՈؐDŽˊ ˊ Ⴎࠊிඣ D F Vϵᇍᬥࠊញᵘ៤Ոˈ࿁ᇍᝯᇍᬥՈᎹࠊՈிඣDŽࠊញᝯ ᇍᬥПⒸՈϬᵘ៤ࠊிඣՈẔDŽϔϬ᭄ े᭄ൟ ˈϬᩥਜ਼ᴎ ᭄ᴎঞᢳᴎ ẟ᭄ᢳˈᇚᩥਜ਼ᴎϢᢳDŽˊ ˊ ࠊிඣ F F VₓᰃₓǃߎₓгₓՈࠊிඣDŽඣЁˈϡӊˈඈ៤ӊ Ոߎₓ῁ₓՈ᭄DŽˊ ˊ ࠊிඣ GL F Vₓᰃₓₓˈ໐ߎₓᰃₓՈࠊிඣDŽிඣЁӊˈϔ ࠊிඣ ఼ࣙ ࠊிඣ ࣙӊ DŽˊ ˊ ᴎᵘ DˈD HᇚࠊবЎՈᴎᵘDŽָˈՈࡼ Ϲ⇨ᴎᵘDŽˊ ˊ ᫇ᴎᵘ U Hϵᴎᵘব᪡বₓՈᴎᵘˈབࠊǃDŽ ˊ ˊ ࠊ F YDŽ ϵࠊᴎᵘ᫇ՈˈҹবₓՈ᫇ᴎᵘDŽˊ ᩥਜ਼ᴎிඣF Vˊ ˊ ϔ J Yˊ ˊ ˊ Ϲᩥਜ਼ᴎ H F࿁ₓẔՈϹDŽᑓϬѢᩥਜ਼ǃ᭄ˊႮࠊᮍDŽỞ఼ǃࠊ఼ǃ఼ঞߎᰒ߾᪂ඈ៤DŽˊ ˊ ˊ ᭄ᩥਜ਼ᴎ GL F₋Ϭᜬ߾᭄ˈϬਜ਼ᇍ᭄ՈϹᩥᴎDŽỞ఼ǃࠊញǃݙᄬ఼ඈ៤DŽˊ ˊ ˊ ᖂˊ఼ P₋ϬࠊՈЁˊ & ˈᖂ>ൟ@ᩥਜ਼ᴎՈӊˈᅠࠊDŽˊ ˊ ˊ ᖂ>ൟ@ᩥਜ਼ᴎ PҹՈᩥਜ਼ᴎDŽҹᖂˊ఼ЎˈҹՈ఼ǃߎ݊ᵘ៤ՈDŽˊ ˊ ˊ ᖂ>ൟ@ᩥਜ਼ᴎ V G PᴎDŽϔࠊϹᖂ>ൟ@ᩥਜ਼ᴎӊՈᩥਜ਼ᴎDŽϔ֜ˈᑊ᭄߾఼ҹᰒ߾᭄࣏DŽˊ ˊ ˊ Ꮉࠊᴎ S FՈᢳ ᭄᭄Ո࿁ˈᑊ ᭄ࠊˈҹᅲࠊ ֕Ո᭄ᩥਜ਼ᴎDŽՈ˖ǃᡫᑆᡄᔎˈ࿁ˈᯊࠊՈᡅˈ᳝Ոẋབ˖ᢳₓǃᓔ݇ₓǃ᭄ₓǃₓǃ᭄ₓߎǃᓔ݇ₓߎঞüᴎỞDŽ ˊ ˊ ˊ ӊ P GXඈញՈӊӊˈϔҹඈՈᷛޚՈӊDŽ ˊ ˊ ˊ ᭄ GD᳝˖D Ϭᜬ߾ǃˈҹႮǃḰᤶ໘ˊDŽǃՈϔႮǃ໘ˊՈՈᜬ߾DŽˊ ˊ ˊ L᭄ˊЁˈҹϔᅮՈ᭄ՈDŽˊ ˊ ˊ LϵǃՈDŽᩥਜ਼ᴎЁˈՈӊ ࣙᩥਜ਼ᴎⒸǃᩥਜ਼ᴎᩥਜ਼ᴎⒸҹঞᩥਜ਼ᴎϢඣⒸՈ ˈՈᩥਜ਼ᴎ࣏Ո఼఼ՈϔᾬDŽˊ ˊ ˊ ᘏඃᡞ ࿁ₓ ՈഄՈỞDŽӊⒸՈඃˈᰃ᭄Ոϔ᭄ՈϔՈᘏDŽ ˊ ˊ ˊ ᭄ GD Kϔᴵ᭄ඃՈঝⒸӴՈᘏDŽˊ ˊ ˊ ᭄ GD QϔϾ᭄ϔϾ᭄ⒸӴՈDŽϔϾ᭄ҹϔϾ᭄ˈՈϡՈ៤DŽ᭄᭄Ոঝݙඈ៤DŽˊ ˊ ˊ O D Q $ϔϬˈ᳝ݙϬѢ᭄ঝⒸẟ᭄Ո᭄DŽˊ ˊ ˊ ᭄ GDᩥਜ਼ᴎˊՈ༘݇Ո᭄Ո▊DŽϔϾ᭄ՈϔᾬܼˈᑊϔϾඈ៤DŽˊ ˊ ˊ ҎᴎỞ PüP FᴎᇍDŽᰃᩥਜ਼ᴎ᭄˗ᩥਜ਼ᴎỞ߾ញᇚ໘ˊࠊ߾ߎᴹDŽЎᴎỞˈᑨࠊǃՈӊDŽˊ ˊ ˊ X Wࢴᴎ P L DŽỞϬϬᴹᩥਜ਼ᴎிඣẟՈǃߎ᪂DŽབ˖ᴎǃ֜Ոᰒ߾఼ǃՈ߾఼DŽˊ ˊ ˊ LˈV₋Ϭᖂˊ఼ˈϵݙࠊՈǃ᭄ϔᅮᩥਜ਼ՈDŽ ˊ ˊ ˊ ᓔඣ R Vޚẟˈ࿁ᩥਜ਼ᴎிඣՈϔᩥਜ਼ᴎிඣDŽ ˊ ˊ ˊ ӊ Vᩥਜ਼ᴎՈிඣ࣏ǃϬ࣏ǃ᪡ඣঞ᭄ˊࠊ᳝݇ՈᴀᘏDŽˊ ˊ ˊ ӊ V V࣏ࠊẋˈࣙᩥǃẔǃϬՈᎹDŽབࠊՈ᪡ඣ᪱ˊிඣDŽˊ ˊ ˊ ᑨϬӊ D VЎϬϬՈӊˈབ᭄ˊǃࠊᑨϬӊDŽ ˊ ˊ ˊ ӊ K GZᩥਜ਼ᴎிඣЁՈᘏDŽབǃӊǃߎỞǃ఼DŽ ˊ ˊ ˊ ӊᅠՈഫ఼ӊDŽ খᢅ ˊ ˊ ˊ ᴵˊ ˊ V D G GLˊ ˊ ˊ VϔϾখ᭄ᜬ߾ՈϔϾবₓՈՈˊবₓDŽখ᭄ࢴՈĀখ᭄āDŽˊ ˊ ˊ ᭄GL Vখ᭄ᜬɴϬ᭄ᜬ߾ՈϔඈؐЁՈDŽˊ ˊ ˊ ᢳ D Vখ᭄ᜬɴݙؐՈDŽˊ ˊ ˊ GLᩥਜ਼ᴎிඣЁˈЎᇍϣՈ֕᪡ˈ߾఼ খᢅ ˊ ˊ ˊ ϞՈ ߾DŽˊ ˊ ˊ ᘏ R GLᜬ߾ᝯᇍᬥ᪂ǃখ᭄ࠊிඣՈDŽ ˊ ˊ ˊ ẋ S GLᜬ߾ϔᝯᇍᬥՈϣǃ᪂খ᭄ՈDŽˊ ˊ ˊ ࠊ F G Lᜬ߾ẋবₓՈ⌟ؐǃ᪂ؐǃؐǃߎؐᭈখ᭄ҹঞՈϔDŽˊ ˊ ˊ ᨪϿ D GLࠊߎՈẋᨪՈˈҹϡՈϡՈ߾ᨪՈϔDŽỞ ˈ᪡ҹᮍϔϾϔᨪDŽˊ ˊ ˊ ᅲᯊ UüW W G GLϔᅮՈ₋ᯊⒸ བ ˈᇚϔᯊⒸⒸ བ ݙখ᭄Ո᭄ˈ఼Ёˈ ᑊҹඃ߾ՈϔDŽˊ ˊ ˊ K W G GLϔᅮՈ₋ᯊⒸ བ P ˈᇍϡՈখ᭄ẟᯊⒸ བ G ₋఼Ёˈ◄ ᡅᯊˈৃҹ᫇ߎᯊⒸݙՈ᭄ˈҹඃ߾ՈϔDŽˊ ˊ ˊ ႮᨪϿ V GL D GLᇍẋࠊঝǃ᪡ঝǃỞẟˈᔧᯊᰒ߾݊ՈϔDŽˊ ˊ ˊ F GLҹᜬ߾ϔඈখ᭄ བᴎ⏽ᑺ ՈDŽˊ ˊ ˊ ᓔ GL Z GRᇚՈϔ߾ˈҹ֓ՈDŽ ˊ ˊ ˋߎ LˋR ,ˋˊ ˊ ˊ ᭄ₓ GL L ',ϡՈ᭄ₓˈгᓔ݇ₓ RüR L DŽˊ ˊ ˊ ᢳₓ D L $,ব࣪ՈˊₓDŽˊ ˊ ˊ ᭄ₓߎ GL R 'ϡՈ᭄ₓՈߎˈгᓔ݇ₓߎ RüR R DŽˊ ˊ ˊ ᢳₓߎ D R $ব࣪ՈˊₓՈߎDŽˊ ˊ ˊ ₓ S L ,ϡՈₓՈDŽˊ ˊ ˊ ₓߎ S RϡՈₓՈߎDŽˊ ˊ ˊ GHˈL X᭄ˊிඣЁ᭄ℸඣՈϔDŽˊ ˊ ˊ ߎ᪂ R GHˈR X᭄ˊிඣЁඣễߎ᭄ՈϔDŽˊ ˊ ˊ ߎ᪂ LüR GHˈLüR X ᭄ˊிඣЁϬᴹᇚ᭄ඣˈඣ᭄ˈՈ᪂DŽˊ ˊ ˊ ẋߎỞ S LˋR FDŽָՈߎӊՈᘏDŽӊᇚᝯখ᭄ བ⏽ᑺǃǃₓˈ ǃǃ៤ˈˈ Ոᢳₓǃ᭄ₓǃᓔ݇ₓǃₓ ˈḰᤶࠊᩥਜ਼ᴎ᠔Ո᭄ₓˈᑊࠊᩥਜ਼ᴎߎՈ᭄ₓḰ ࠊ᠔ՈˊₓDŽˊ ˊ S Hᩥਜ਼ᴎிඣЁЏ఼ߚՈ݊ՈᘏDŽˊ ˊ ˊ ᴎ Sϔߎ᪂ˈᇚᩥਜ਼ᴎߎǃՈ᪂DŽˊ ˊ ˊ K G FD ᰒ߾ញՈDŽᩥਜ਼ᴎՈߎˈָՈ᭄ӊ ਞǃᜬ DŽˊ ˊ ˊ ˋ᭄ǃ᭄ˋḰᤶ఼ $ˋ'ǃ'ˋ$ FᇚՈᢳₓ བ˖ǃϹ ḰᤶՈ᭄ₓᑊḰᤶՈ᪂DŽˊ ˊ ˊ ֜ Gϔඈ᳝Ոᵘ៤Ոញˈ᭄݊Ոˈᑊᇚ݊ЏᴎDŽˊ ˊ ˊ֜ϞՈϔࠊˈҹ᪂ǃᅠϔϾՈDŽ ˊ ˊ ˊ ᭄֜ϞՈϔDŽᔧᅗϬᯊˈৃҹᅲ᭄ǃՈᅠDŽˊ ˊ ˊ ߾఼F GH U W &ࢴ߾఼ Y GR GL Xˈ'8 DŽᩥਜ਼ᴎߎՈᰒ߾఼ˈৃҹᰒ߾ǃᜬǃ᪱ˈỞϬඃ߾DŽᰒ߾఼ϟ┈ ᪂֜ǃ఼ˈϬᰒ߾఼ᴎᇍDŽˊ ˊ ˊ O SӊՈ⌟ញDŽϬѢ⌟ᰒ߾఼Ոˊˈᩥਜ਼ᴎᑊᇍՈ ǃDŽˊ ˊ ˊ Wࠊᰒ߾఼ϞՈϔDŽỞˈࠊՈᮍDŽˊ ˊ ˊ ఼ Pᩥਜ਼ᴎՈϔ఼ˈỞϔᜬ☦DŽ ˊ ˊ ˊ Ꮉঝ H VկࠊᎹϬՈˈᇍᩥਜ਼ᴎிඣẟඈᗕǃǃׂՈঝDŽ ˊ ˊ ˊ ᪡ঝ R VկϬՈϔࠊৄDŽᰃᩥਜ਼ᴎⒸՈҎᴎˈϔϾ߾఼ˈẜ ࣙϔϾˈབ⏲֜ǃDŽ ˊ ˊ ᩥਜ਼ᴎ֕ Vˊ ˊ ˊ ᩥਜ਼ᴎ֕ඣ F P Vᇍϣখ᭄᪂⌟ˈᑊˊৢ߾ǃǃᨪՈᩥਜ਼ᴎிඣDŽϬ ѢࠊிඣՈϔᾬᯊࢴĀ᭄ඣā GDˈ'$ DŽˊ ˊ ˊ ᩥਜ਼ᴎ֕ඣ F V VᇚϣՈখ᭄ǃᝯᇍᬥ⌟໘ˊˈᑊՈࠊᢈǃࠊ Ոᩥਜ਼ᴎிඣDŽˊ ˊ ˊ ᭄ GD Dᇚᩥਜ਼ˊẋҹঞࠊЁՈ᭄ҹ₋ˈḰᤶ᭄ᔧˊՈẋDŽˊ ˊ ˊ ᭄ˊ GD Sᇍ᭄ඣՈ᪡ˈབඃǃDŽˊ ˊ ˊ ᭄ GD U GˈGD Oᇚᩥਜ਼ᴎẔ⌟໘ˊẋՈ᭄ˈϔᴎߎᴹDŽ ˊ ˊ ˊ ᭄ K GD PᇚₑՈẔখ᭄ᅮ఼Ёˈᖙᯊˈৃҹᯊ᫇ߎᰒ߾ˈᯊⒸৃҹᰃϔϾǃϔ᭄DŽˊ ˊ ˊ ᅮᯊ S GL Oᇚᩥਜ਼ᴎẔ⌟໘ˊՈ᭄ՈᯊDŽˊ ˊ ˊ S OᴎඈߎɴᯊˈᇚǃৢϔᅮᯊⒸݙᣛՈখ᭄᭄ߎᴹDŽ ˊ ˊ ˊ ᴎ U W OਃࡼՈᮍ খ᭄ᨪǃ᪂ਃذ ਃࡼᴎˈঞᯊᇚ᳝݇খ᭄᪂Ոᓔ݇ߎᴹDŽˊ ˊ ˊ ӊ V R Hথᯊˈᓔ݇ՈˈᯊⒸߎᴹDŽˊ ˊ ˊ ߚ UϬᴹҹՈᴵՈ᳔ⒸˈᇍѢϔϾ⌟ₓிඣˈҹ⌟ₓՈ᳔᭄ₓ˗ᇍѢϔϾࠊிඣˈҹࠊՈ᳔ₓ˗ᇍϹˈᓔ݇Ո᳔ᯊⒸⒸˈϔ൫˗ᇍ&ˈǃᜬՈᑺDŽˊ ˊ ˊ V Uҹ᭄ᜬ߾ՈϔிՈDŽˊ ˊ ˊ ₋ V S GࠊிඣЁⒸՈᯊⒸⒸDŽˊ ˊ ˊ &߾ & GLᇚ᭄ඣЁՈẔ⌟໘ˊ&߾ߎᴹˈབඈখ᭄ᰒ߾ǃ߾ǃ߾ǃඃ߾ǃ߾DŽˊ ˊ ˊ ᗻᩥਜ਼ S Fᇚ᭄ඣЁ⌟໘ˊՈ᭄ˈՈᇍᴎඈẔᩥਜ਼ˈབϬϹˈǃᴎᬜǃᴎඈᬜǃ(ǃ⛁DŽ ˊ ˊ ˊ ᪡ R J GDᇍᴎඈਃǃذǃˊՈϬ᭛߾ˈгᨪߎˈؐʱҹDŽˊ ˊ ߚࠊிඣ GL G F V '₋Ϭᩥਜ਼ᴎǃỞ߾ˈᅲᇍϣՈ᭄ǃࠊᡸˈϬỞ᭄Ոᩥਜ਼ᴎ֕ඣˈ݊ˈ᭄ˈৃDŽԧгҹᰃӊՈߚDŽ ˊ ˊ ˊ ẋࠊ൫ S F OߚࠊிඣᵘЁՈϔ൫ˈ൫ϵՈẋঝǃࠊঝඈ៤ˈঝ⌟Ҿᜬᴎᵘˈᅠ᭄Ո₋໘ˊˈᑊᇍᎹࠊ֕DŽˊ ˊ ˊ ֕൫ V OߚࠊிඣᵘЁ൫ՈϞϔ൫DŽϵᴎ݇ඈ៤DŽ൫ЏࠊϢࠊҹঞˊDŽˊ ˊ ˊ ˊ൫ P OߚࠊிඣᵘЁՈϔ൫ˈϵˊҎᴎඈ៤DŽ൫ҹˊϢˊˈࣙᑺǃிඣǃₓࠊǃࠊᜬǃ᭄ẟǃᦤDŽˊ ˊ ˊ ࠊঝ F Vߚࠊிඣẋࠊ൫ЁՈϔঝˈϬҹᅲᇍᎹՈ᭄ָࠊDŽ ࠊঝҹˈг᭄ඈ៤൫֕ඣDŽ ˊ ˊ ˊ ᭄ঝGD D Vߚࠊிඣẋࠊ൫ЁՈϔঝˈϬѢₓՈẔখ᭄ᅲ᭄Ո₋ˈᇚ݊ᔧՈḰᤶ໘ˊDŽ ᭄ঝҹˈгҹϢ᭄ඈ៤൫֕ඣDŽˊ ˊ ˊ ࠊঝ V F Vϵࠊ఼ S O F ߚࠊிඣࠊঝඈ៤ˈϬҹᅲՈࠊDŽࠊঝҹˈг᭄ඈ៤൫֕ඣDŽˊ ˊ ˊ ẋঝ S Vᰃࠊঝ᭄ঝՈᘏDŽˊ ˊ ˊ ഫࠊ៤Ոǃ໘ˊǃ᫇ࠊǃǃᨪՈ࣏ഫDŽˊ ˊ ˊ ඈᗕǃ FߚࠊிඣЁˈϬඣᡅᇍϡՈഫᔧඈՈẋӊඈᗕDŽ ߚࠊிඣЁˈϬඣᡅˈᇚϡՈঝǃӊˊඈӊDŽˊ ˊ ˊඣ P L V ,ᰃϔϾᩥਜ਼ᴎՈҎᴎிඣDŽˊ᠔ҹϔϾՈϣDŽϔǃࠊˊˊᵘ៤DŽඣˈϣǃᩥǃǃǃǃҎǃඣDŽிඣҹ᭄ǃᜬՈᮍˊˈҹᇍՈˊ᳔ࠊDŽ ҹॖˈϵ൫ՈϣǃᩥǃǃǃǃҎǃඣඈ៤Ոˊඣˈࢴ൫ˊඣDŽˊ ˊ ॖ൫֕ඣ S V L V Ϭᇚᴎඈᩥਜ਼ᴎ֕ඣЁՈ᳝݇ᯊ᭄ؐ ᘏ Ո᪡ঝˈЎؐ ᘏ ֕ᴎඈᅝՈᅲᯊDŽᯊгᑺᇚᴎඈՈ'DŽ ˊ ৃ U᳝˖D ᢈᴵӊϟᢈՈᯊⒸݙᜬǃࠊញᩥਜ਼ᴎிඣᅠՈ࿁DŽՈᯊⒸՈՓϬ᭄ݙˈ᪂ ఼ࣙӊ ࿁ՈDŽϵඣᩥ⌟ₓ᳝ˈ᠔ҹϔϬⒸᯊⒸᜬ߾DŽ ˊ ˊ ৃ PᴵӊᇍՓϬՈҾᜬǃࠊញᩥਜ਼ᴎிඣˈẟՈᑺˈՈ࿁DŽˊ ˊ ৃϬᯊⒸ D WϬՈᢆߎথˈᴵӊབǃ⇨ℷՈϟˈிඣញϬՈᯊⒸDŽˊ ˊ ᯊⒸ P W Ҿᜬǃࠊញᩥਜ਼ᴎிඣՈᢈݙˈᢈᴵӊϟⒸՈᯊⒸؐDŽˊ ˊ ᯊⒸ P W W UҾᜬǃࠊញᩥਜ਼ᴎிඣᢈݙˈᢈՈᴵӊϟˈẟՈᯊⒸՈؐDŽˊ ˊD ᇍϡՈҾᜬǃࠊញˈՈᎹᯊⒸᬙՈᯊⒸˈҹ P W W ᜬ߾DŽᇍৃՈҾᜬǃࠊញˈⒸՈᎹᯊⒸˈᯊᯊⒸDŽˊ ˊ ᬙிඣிඣЁՈ Ҿᜬǃࠊញᩥਜ਼ᴎிඣ ϡՈDŽˊ ˊ ৃϬ DϔϾிඣℷՈᯊⒸᩥՈᘏᯊⒸˈϬ᭄ᴹᜬ߾ˈेˋ DŽˊ ˊ GX GD GHᇍிඣЁ݇⏲Ո໘ϬźՈ᪂DŽˊ ˊ ֵ F P GH VᯊѢ ߎ ⒸՈؐՈDŽ ˊ ˊ P GH YѢ ߎ ⒸՈǃؐՈϹDŽҹᰃᴎ⌟ₓDŽˊ ˊ ᑆᡄ F P GH LϵՈߎՈব࣪DŽˊ ˊ ࠊ F P GH UҾᜬǃࠊញᩥਜ਼ᴎிඣࠊṗᇍ݊ߎՈ࿁DŽ ˊ ˊ ࠊ↨ F P GH U UҾᜬǃࠊញᩥਜ਼ᴎிඣՈˈϢߎՈՈDŽ ࠊ↨Ϭ↨ؐؐՈ Ոߚ᭄ᜬ߾DŽˊ ˊ ֵ V P GH VҾᜬǃࠊញᩥਜ਼ᴎிඣϬՈDŽˊ ˊ V P GH Yᝯ⌟ϹϬՈDŽˊ ˊ ᑆᡄ V P GH Lϵ߾ؐߎՈব࣪DŽˊ ˊ ࠊ V P GH UҾᜬǃࠊញᩥਜ਼ᴎிඣࠊṗᇍ݊ߎՈ࿁DŽ ˊ ˊ ࠊ↨ V P GH U Uߎব࣪Ոֵؐᇍѻߎব࣪ₓDŽࠊ↨Ϭ↨ؐؐՈ Ոߚ᭄ᜬ߾DŽ ☿ˊ Ⴎ D OᰃᇍϔϾࠊ᠔Ո࣏ᑺDŽ݊খ᭄Ẕ⌟ǃ᭄ˊǃႮࠊǃࠊǃᨪᡸঞඣ᪂ᩥՈᅠᑺˈ᳔ؐʱՈ᭄ₓ᠔ՈDŽ☿থՈႮᴎࠊₓঞ˗ᜬঞࠊ᪂ₓ˗ඣ᪂ᩥՈᅠᑺ˗ᮑᎹₓ˗ᡸᯬՈDŽˊ ⛁ᩥ GH R S S D ᩥᇍᬥՈᴵӊᡅˈϔᇍখ᭄Ẕ⌟ P ǃᨪ D ǃࠊ F ᢳₓࠊǃࠊᓔϔ݇ࠊ ᡸ S ݙՈႮඣDŽेᇍǃᴎඈঞிඣǃ(୍ࠊඣˈǃǃǃկǃˊǃ⊍⊍ඣᡸ᠔ՈҾᜬࠊ᪂ඣϔՈிඣ᪂ᩥᅝᩥDŽ ˊ ˊ ࠊᮍ F P GHؐʱࠊᴎඈ݊᪂ՈẔՈˈЏݙࠊ֜ ৄ Ո᠔Ո֕DŽϔࠊ▊ࠊDŽˊ ˊ ࠊ O Fࠊ֜ ৄ Џ བǃᴎ ඣ བ┨ඣǃ⛁ඣ ┈ˈⒸ བˊḪⒸǃկ⊍⋉ ݙˈؐʱࠊ֜ϞˈߚᇍᝯᇍᬥՈẔࠊDŽ ˊ ˊ ▊ࠊ F G FᇚϣՈ᪂݇ඣՈࠊ֜ ৄ ▊ࠊݙˈؐʱᇍՈᴎඈẟՈ֕ࠊDŽˊ ˊ ᴎࠊ üW F G FᇚǃᴎՈࠊ֜ ৄ ▊ࠊݙDŽЏϬѢඣЎࠊՈᴎඈDŽˊ ˊ ࠊ X F G Fᇚᴎඈ ǃᴎঞᴎ Ոࠊ֜ ৄ %֜ ▊ࠊݙˈؐʱᴎඈϔϾࠊDŽϬѢϹඣഛࠊՈᴎඈDŽˊ ˊ ḪⒸؐʱࠊ QüR F GH ϡؐʱˈඣᇍϣࠊՈḪⒸˈℸିⒸՈᡸிඣᅠˈᬙᯊৃҹႮՈ᪂DŽ ˊ ᢳₓࠊிඣ P GX F Vᅲǃᴎঞඣখ᭄ႮࠊՈᘏDŽඣЁˈᐌখ᭄Ⴎࠊঞᨪˈᇍࠡˈ݊ߎₓЎₓՈ᭄DŽᇍӊЁгࠊிඣ&GOü W V DŽ ˊ ˊ ᴎඈࠊ X F GL G FᇚüᴎඈϔϾࠊˈỞࠊಲᴎඈႮՈᎹˈǃᴎՈႮඣথߎˈҹব࣪Ո◄ˈᴎඈ᫇ǃ᫇Ո࿁DŽϬՈ൫ᰃࠊிඣᴎࠊிඣDŽˊ ˊ ˊ P GH W % ᴎࠊ ᓔɳ ˈࠊ ˈՓՈ ᴎব࣪Ո◄DŽℸҹϬˈˈгᴎՈϔDŽˊ ˊ ˊ ᴎ W P GH 7 ࠊ ᓔɳ ˈᴎႮࠊ ˈՓᴎࠡDŽℸᴎඈᴎࠡˈˈгᯊϡՈϔDŽˊ ˊ ˊ F GL G P GHǃᴎᯊࠊՈࠊிඣˈℸՈϬˊ ˊ ࠊிඣ F VᅲࠊՈᘏDŽˊ ˊ ˊ ࠊ GüZ FࠊẟₓՈႮࠊிඣDŽᇍˈࠊிඣDŽˊ ˊ ˊ ࠊ F FࠊẟₓՈࠊிඣˈेࠊՈႮࠊிඣՈˈࣙǃₓࠊDŽˊ ˊ ˊ ࠊ S Fࠊ ℷ ՈႮࠊிඣDŽˊ ˊ ˊ ễࠊ D FࠊₓՈႮࠊிඣDŽˊ ˊ ˊ ࠊ FࠊẟՈₓ (ˈ⊍ˈϬ⇨བǃǃ ՈႮࠊிඣDŽˊ ˊ ˊ ẋ⏽ࠊ V V W F ࠊ⏽ᑺՈႮࠊிඣDŽˊ ˊ ˊ ⏽ࠊ U V W Fࠊ⏽ᑺՈႮࠊிඣDŽˊ ˊ (ᴎࠊிඣ S ˈP ᅲ(ᴎࠊՈᘏDŽˊ ˊ ˊ (୍⏽ᑺࠊ S W F(ˈࠊ(ᴎߎ(୍⏽ᑺՈࠊிඣDŽˊ ˊ ˊ (ᴎҎ ࠊ P L S F ᇍ(ᴎҎ ࠊՈࠊிඣDŽ(ᴎࠊඣՈϡˈࠊবₓᝯₓᰃՈDŽˊ ˊ ˊ (ᴎࠊ O G F R PࠊẟՈ(ₓˈՓ(ᴎ᳔ϟẔՈࠊிඣDŽ ˊ ˊ ᴎࠊிඣ W F VᅲᴎࠊՈᘏDŽेᴎḰợথᴎՈؐՈႮࠊிඣDŽˊ ˊ ˊ ᴎࠊிඣ P K GU F ϵᴎˊ᪂ᩥՈӊǃӊᴎᵘᵘ៤ՈᴎࠊிඣDŽඣDŽˊ ˊ ˊ Ϲࠊிඣ HüK GU F ϵˊ᪂ᩥՈӊǃˊ᪂ᩥՈӊᴎᵘᵘ៤ՈᴎࠊிඣDŽඣDŽˊ ˊ ˊ ᭄ࠊிඣ GL üK GU ' ϵˊ᪂ᩥՈӊǃ᭄ ᩥਜ਼ᴎ ǃˊ᪂ᩥՈӊᴎᵘᵘ៤ՈᴎࠊிඣDŽ᭄DŽˊ ˊ ˊ ᢳࠊிඣ D üK GU $ ϵˊ᪂ᩥՈӊǃᢳǃˊ᪂ᩥՈӊᴎᵘᵘ៤ՈᴎࠊிඣDŽᢳDŽˊ ˊ ˊ ᴎϹࠊிඣ PüHüK GUϬᖂൟᴎ ᩥਜ਼ᴎ ঞᴎᵘᅲᴎႮࠊՈࠊிඣDŽ ⊼˖г᭄ࠊிඣˈᴎՈĀ'āˈĀˊ ˊ ˊ ᴎႮਃذிඣ D GR $7ᴎՈ⛁݊খ᭄ˈᴎࠊிඣᅠᴎՈਃࡼǃᑊذՈႮࠊிඣDŽˊ ˊ ˊ ᴎ⛁֕ඣ W V V V ₋Ϭ᭄ൟˊൟՈᮍ⌟ḰᄤՈ⛁ˈᇚᴎࠊிඣˈϬҹࠊՈՈˈֱḰᄤݙՈႮඣDŽˊ ˊ ˊ ᴎඣ H W VᴎẔˈߎɴᯊ࿁ᮑẟˊˈᑊᯊˈ࿁ᮑˈذᴎẔՈֱᡸிඣDŽ ˊ ˊ ˊ Ḱợࠊ V G FᴎࠊிඣϔˈϬѢਃࡼǃᅮḰợࠊDŽ ˊ ˊ ˊ ࠊˋ O G JᴎࠊிඣϔˈϬѢᇍᴎඈࠊDŽˊ ˊ ˊ ࠊ O G OᴎࠊிඣЁՈࠊϔˈỞࠊᴎ᫇ՈᓔᑺᴹࠊᴎඈߎDŽˊ ˊ ˊ ᡸࠊ RüV G S F ᡸࠊᰃϔࠊՈࠊDŽ᳝ϬᑺࠊᮍՈˈгϬࠊᮍՈˈབᴎḰợḰợՈ ˁᯊˈ݇⒱ˈᔧḰợᯊᓔਃ᫇ˈབℸডˈָḰợࠊಲҹḰợ˗ᯊ₋ϬDŽˊ ˊ ˊ ᡸ RüV G S WᴎֱᡸிඣϔˈᔧᴎḰợϔؐᯊႮᴎ݇ЏDŽˊ ˊ ˊ ࠊ YüS Fᴎࠊிඣϔˈָࠊ᫇ᓔᑺՈࠊᮍDŽ ˊ ˊ ˊ Q JϬবՈᮍবẟₓՈ᫇DŽ$ S DŽˊ ˊ ˊ Ā JϬবẟᓔᑺՈᮍবẟₓՈ᫇DŽ$ DŽˊ ˊ ˊ U R O Gᴎࠊிඣϔˈᇚᴎℷϟ᠔ՈˈথՈⒸݙᾬDŽˊ ˊ ˊ ᫇ YᴎࠊிඣϔˈᔧⒸᬙᴎᑺᯊˈ݇⒱ˈᑊᓊảϔڱᯊⒸৢˈᓔਃ᫇ˈҹᴎϹՈˈிඣՈˈϡிඣሥDŽ ˊ ˊ ˊ ϹḰᤶ఼HüK GU FࠊிඣЁˈᇚϹࠊḰᤶࠊՈ᪂DŽˊ ˊ ˊ ⊍,ǃߕ S WϹḰᤶ఼Ёࠊ᫇⊍ₓᮍՈDŽˊ ˊ ˊ ⊍ᴎ VỞ⊍Ϲࠊࡼ⊍ˈՓЏՈᴎᵘDŽ ˊ ˊ ˊ ˊ Y Pᅮǃ ব࣪Ոᡅˈব᫇Ոᓔਃᮍˈᴎ ܼ ᾬ ՈϟẔDŽḰᤶ $ˋ$W DŽˊ ˊ ˊ Ḱợ ᑺবࡼ GU S V G Y ᴎࠊிඣඃՈDŽỞҹᇍᑨՈḰợؐϢḰợؐՈ᭄ᴹᜬ߾DŽˊ ˊ ˊ ả GH G GඃϟᜐᯊՈϡˈࢴảDŽảҹϔϟᜐඃᇍᑨՈḰợؐϢḰợؐՈ᭄ᜬ߾DŽ ˊ ˊ ݊ˊ ˊ ˊ ࠊிඣ F V %ᴎՈႮǃ⏽ᑺႮࠊிඣՈᘏDŽ ˊ ˊ ˊ Ⴎࠊ D J F $*ࠊথᴎՈႮࠊிඣDŽˊ ˊ ˊ Ⴎᑺிඣ D GL V $'ǃᝯᴎඈᖂඃˈᅲᑺ ՈႮࠊிඣDŽˊ ˊ ˊ Ⴎඣ D V G V $ᴎࠊிඣՈϟˈᅲᴎႮՈࠊிඣDŽ ˊ ᓔ݇ₓࠊிඣ üR Vᅲǃᴎঞਃǃذᓔǃ݇ՈᘏDŽˊ ˊ ࠊிඣ V F VᇍϔᎹඣЏᴎϔᅮࠊՈࠊிඣ ᓔɳࠊࠊ DŽˊ ˊ ˊ ඈ൫ࠊ J FᡞՈՈ᪂ϔϾՈࠊˈབࠊDŽˊ ˊ ˊ ඈ൫ࠊ V FᡞϔᴎঞϔඣϔϾՈࠊˈབᴎǃᓩᴎǃՈࠊǃ఼ࠊDŽˊ ˊ ˊ Ϭ᪂ࠊ D V Gü FҹϞՈ᪂ བ ˈẔذߎᯊˈϬ᪂ਃࡼՈࠊDŽˊ ˊ ˊ ఼ࠊிඣ F V %ব࣪Ոᡅ఼ˈႮ఼ՈࠊඣDŽЁⒸࠊඣЁ៤ᇍՈ఼˗ָࠊඣЁϔৄ(ᴎঞՈਃذࠊிඣˈгϔҹՈࠊிඣDŽˊ ˊ RüWüR Fࠊᓔ݇ ᇍᑨϔৄϹᴎՈ఼ ఼ ˈᑊᇍৄ఼ ఼ ẟ ᓔǃ݇ ᪡DŽˊ ˊ ඃ V FϬᇍϹᴎՈ఼ ఼ ẟˈ໐ϬՈ᪡ᓔ݇ ᇍϹᴎ఼ ఼ ẟ ᓔǃ݇ ᪡DŽˊ ˊ ᓔ݇ₓ᪡఼ üR VϬѢᇍᴎẟਃǃذᓔǃ݇Ո᪂DŽϔᓔ݇DŽˊ ᨪ Dˊ ˊ ᨪඣD Vߎˈҹᜬࠊிඣϡிඣখ᭄ؐՈႮඣDŽˊ ˊ ؐᨪ O DẔߎবₓϟՈᨪDŽˊ ˊ ᨪGH DẔߎবₓؐՈᨪDŽˊ ˊ ఼ Dᜬ݇খ᭄ՈDŽᇍҹᜬ߾ᨪݙՈ఼ࢴDŽˊ ˊ ߎ RֱᡸࡼˈỞˊញϬ߾ߎᓩᡸࡼՈϔDŽ ˊ ˊ ᨪᡥࠊ D F RᨪՈϔˊᮍˈབ བਃࡼ ϟˈখ᭄ؐᨪؐᡅˈᬥˈЎᨪՈᮑDŽˊ ֱᡸϢ S Lˊ ˊ ඣ G ᔧᯊˈֱᡸ ݙ ໐ࠊᮑՈႮඣDŽࣙඣ V V ఼ࠊிඣ % DŽˊ ˊ ˊ ᘏ P WϵֱᡸˈՈ᠔DŽ ˊ ˊ ˊ ⊍ R W݇⒱⊍ˈՈ᠔⊍ₓDŽˊ ˊ ˊ WϵẔ ϔ(୍ ႮDŽˊ ˊ ˊ ☿ḰবЎՈ࣪ᢅ݊ˊᜬDŽˊ ˊ ˊ ☿ HᇚḰবЎᢅϡᢅՈDŽˊ ˊ ˊ VՈ᳔ব࣪ϟˈՈ☿DŽ ˊ ˊ ˈ ☿⌟఼ GHẔ⌟☿ᔎߎৃϬՈϹՈ᪂DŽˊ ˊ ˊ ܼ O R Dᜬ߾Ոϔˈᵘˈ᳝ϟ߫DŽD ᇍ˖Ϭ఼☿⌟⌟ᮍˈᔧϔ⌟఼Ẕ⌟Ո ˋ ᯊ˗Ϭܼ⌟ᮍˈᔧ ˋ ҹϞՈ☿⌟఼Ẕ⌟ϡᯊˈᅮDŽᇍ:ൟ ⚻ᓣ♝ၟ˖ᔧẔ⌟ࠄ☿Ѣϔ᭄ₓᯊ ৃ ⚻᭄ₓঞ ˈᅮ♝ၟ☿DŽF ᇍᓣ ⚻♝ၟ˖ᔧϔ߫ ⚻☿Ẕ⌟఼Ẕ⌟ࠄՈ☿Ѣϔ᭄ₓᯊˈᅮ♝ၟ☿DŽˊ ˊ ˊ ⚻☿Ẕ⌟ L G ϔ ⚻ѢẔ⌟ ⚻☿Ẕ⌟ᮍᓣDŽ ˊ ˊ ˊ ☿Ẕ⌟ H Gᓣ♝ၟˈ ⚻☿Ẕ⌟఼ˈϬ ⚻ ⚻☿Ẕ⌟ᮍᓣDŽˊ ˊ ˊ ܼ♝ၟ☿Ẕ⌟ Gϔ ⚻☿Ẕ⌟఼ˈϬẔ⌟ܼ♝ၟ ⚻☿Ẕ⌟ᮍᓣDŽˊ ˊ ˊ ☿ FẔ ⚻ ˁ ˁ ⚻☿ˈϔᅮᯊⒸ བ V ݙּᯊՈ☿DŽˊ ˊ ˊ ☿ O R O W D Fᓣ ⚻♝ၟϔˈ᳝ ⚻ˈߎ ⚻ ᭄ₓৃ Ո☿DŽˊ ˊ ˊ ᾬ☿ S O R♝ၟϔϾ☿ ⚻☿DŽˊ ˊ ˊ ♝ၟ HϬₓϟˈễ♝ၟˈҹ┨ӏ ˈᑊ˖D ᯊⒸѢ P♝♝ၟݙ DŽˊ ˊ ˊ Āₓ S UϡѢܼₓՈ ˁˈᯊѢ ˁₓDŽ ˊ ˊ ˊ V ⚻☿఼ৢˈՓ ⚻ ᭭DŽˊ ˊ ˊ ⊍ V V R YˈV W Y ᭭ˈႮ ⚻ ᭭☿ DŽˊ ˊ W V L 7 ֕ ǃǃǃᴎ᭄ ՈDŽ ˊ ˊ ˊ Ḹ D PˈW S P ֕ḸDŽˊ ˊ ˊ W V P֕DŽˊ ˊ ˊ G H P֕DŽˊ ˊ ˊ D ҹˈ⌟ₓDŽˊ ˊ ˊ Ḹ Ḹ U H P֕ḸDŽˊ ˊ ˊ Ḹ Ḹ Vˋ Y P ֕ḸḸDŽˊ ˊ ˊ ] VᰃϔϾˈϬḸDŽˊ ˊ ˊ WϔˈDŽ⌟ₓḸ᭄ˈᑊ⌟ߎখDŽˊ ˊ ˊ Ϲ H F Sϔᓣˈҹˈ࿁⌟ₓ⌟ᜬѢᅝDŽˊ ˊ ˊ W⌟ₓḸDŽˊ ˊ ˊ ᬙ D U Hü P $'ᰃϔϾ Ḹ᭄ˈỞẔˈᇍǃ໘DŽẔ⌟ঞ᭄DŽ ˊ ˊ L᳝˖D བṗǃ♝ ⚻ ˈϔ᪂ᯊˈЎৢৢՈDŽ Ўߎϡ࣏ˈ໐ˈ₋࣏ˈҹˈབʌࡴDŽˊ ˊ ᴎ FথᯊˈՓ♝ϔˈৢˈৃᓣ˖D ˁ)ˈᰃᓣDŽˁ)ˈᰃ♝ᓣDŽˊ ˊ U 5ᰃDŽ བඝǃễǃᓩ থǃᴎᯊˈDŽ ˊ ˊ L Fϔখ᭄ࠄϔ᪂ᯊˈᯊϔ᪂DŽ ˊ ǃ F UˈF֜ ৄ ˈᇍĭDŽ ˊ ˊ X F U᳝ᯊࣙ֜ Ո֜ ৄ ˈᇍDŽˊ ˊ F U֜ ৄ ˈᇍDŽབൟ☿ǃ♝ǃ┨DŽˊ ˊ Џ H Fࣙǃবǃկ Ո֜ৄˈĭDŽˊ ˊ ϹϹ F UկDŽˊ ˊ O F Uˈᅝி֜ ৄ Ոˈབ♝ǃǃǃ┨ǃǃ ┨ᇬ DŽˊ ˊ ᴎ♝ üW F U♝ˈ♝ǃ֜ ৄ ՈDŽˊ ˊ HüQ F U֜ৄǃᇍDŽˊ ˊ Ϲ H Uᅝ ࣙ ᶰDŽˊ ˊ ؐ V H UϹՈˈݙDŽˊ ֜ ৄǃᶰˊ ˊ ֜ǃሣ SݙDŽ ϬѢᅝǃDŽˊ ˊ ᶰ Fˈੵ᳝ ݙǃDŽੵDŽˊ ˊ ֜ FǃՈ֜ ሣǃᶰ DŽ ˊ ˊ ৄ FਬৄDŽৄϞ֜ DŽˊ ˊ ᴎ֜ %֜ W J S♝ǃǃথ֜ ৄ DŽˊ ˊ ֜D S┨֜ˈ݊֜DŽˊ ˊ ֜ ሣ P S֜ ሣ Ϟ߾ˈҾǃ߾֜ ሣ DŽˊ ˊ ֜ ሣ VüP S֜ ሣ Ϟ߾֜ ሣˊ ˊ ֱੵ ᶰ Zü Fੵ ᶰ ݙࡴˈ࿁ݙੵ ᶰ DŽ֜ ሣ Ϟ߾DŽᇬ⓶ੵᶰDŽࡴˊ ˊ ⛁ᶰ ੵ üG Ўᶰ ੵ ˈᶰݙֱ݊DŽᶰᓣᓣᓣϸDŽˊ ˊ ੵ ᶰǃᶊ W FˈUկੵ ᶰǃᶊ ˈݙDŽˊ ˊ ᶰ U FញࡴᶰDŽˊ ˊ ൫ G R S൫ * ü ᬜ, ᷛẔˈᇍੵ ᶰ ˈĭ ࣙᇬ ẟDŽ, Lü W S ߾DŽ ˊ V DŽˊ ˊ ☿Ϲ S S Vᇍˈ࿁ˈЎDŽ ᭄݊Ո߾ǃǃ᪡ǃႮDŽˊ ˊ ܼǃ Ϣ֜ǃৄঞ݊ϞϔDŽẔ ᭄ՈϔˈᑊᯊՈˈDŽˊ ˊ ǃ U V K U᭄Ոϔˈ֜ǃৄњDŽ ǃˈ໐DŽˊ ˊ Ởൟ J Vϔˈ֜ ৄ ǃൟњˈ ᳝DŽˊ ˊᝯǃࡼDŽ ˊ ˊ ĭ Sĭ֜ǃৄDŽ ˊ ˊ ᝯ SϵDŽǃ᭄ൟ᭄ ՈDŽˊ ˊ ৄ ৄ L V֕ˈϔৄ&֜ˈ ࡴϔϾDŽˊ ˊ V VϬDŽ˖D Ϲൟ˗ৄ˗F ˗G ᩥிᅲDŽˊ ˊ V F ՈDŽϔ˖D Ꮉ ˗ᯊ˗F ᬙ┨˗G Ẕǃൟ˗H ₑ˗ᅲᯊǃ˗J ˗K ᭄໘˗L ˗DŽˊ ˊ R VᇍՈˈϔϔৄϔϾ֜ˈ֜DŽˊ ˊ ,ˋ2 ,ˋ2 L Hᇍ֜Ϟˈϔ$ˋ'ǃ'ˋ$ǃ',ǃ'2DŽˊ ˊ Ϲൟ S P VǃᅲᯊഄǃՈˈ݊ѢൟϬDŽˊ ˊ L V VЎDŽˊ ˊ ⌟᪙ G D W V ᇍ ࣙǃᜬ֜᪂,ˋ2 ẟ⌟᪙DŽᆵ᭛௦ᓩAabsolute expansion monitor of turbine ..............................................4.6.2.4 accuracy ...........................................................................3.2.17 accuracy class......................................................................3.2.18 actuator, actuating element ........................................................3.3.20 adaptive control ...................................................................3.3.11 air flow control ...................................................................4.3.2.4 alarm ..............................................................................4.5 arm cut out ........................................................................4.5.6 alarm display.......................................................................3.4.2.8 alarm system .......................................................................4.5.1 analog electro hydraulic control (AEH) .............................................4.3.4.4 analog input ˄AI ˅..................................................................3.4.3.2 analog output (AO) .................................................................3.4.3.4 analogue signal ................................................................... 3.4.2.3 annunciator ........................................................................4.5.4 application software .............................................................. 3.4.1.22 automated diagnostics for steam turbine [rotating equipment] (ADRE) ...............4.6.2.11 automation ........................................................................ 3.1 automatic control ................................................................. 3.3.1 automatic control system ...........................................................3.3.17 automatic dispatch system (ADS) ....................................................4.3.5.3 automatic generation control (AGC) .................................................4.3.5.2 automatic level ................................................................... 4.1 automatic synchronized system (ASS) ............................................... 4.3.5.4 automatic stand-by control ........................................................ 4.4.1.3 automatic turbine startup or shutdown control system (ATC) .........................4.3.4.6 auxiliary panel ................................................................... 4.8.6 available time .....................................................................3.5.2 availablity ....................................................................... 3.5.7 axial movement .................................................................... 4.6.2.1 Bbar chart display ................................................................. 3.4.2.12 (function) block .................................................................. 3.4.6.8 boiler control system ............................................................. 4.3.2boiler follow mode (turbine base) (BF) .............................................4.3.1.1 boiler-turbine centralized control................................................. 4.2.4 boiler-turbine control room ........................................................4.7.6 boiler turbine generator panel......................................................4.8.5 burner control system (BCS).........................................................4.4.1.4 bus ............................................................................... 3.4.1.11box ............................................................................ ...4.8.2bypass control system (BPC).........................................................4.3.5.1C cabinet.............................................................................4.8.2cable room..........................................................................4.7.4 cascade control ................................................................... 3.3.8 cathode ray tube (CRT) ............................................................ 3.4.4.7 centralized control ............................................................... 4.2.3 centralized monitoring system.......................................................3.1.7 combustion control..................................................................4.3.2.2 common mode interference .......................................................... 3.5.11 common mode rejection ............................................................. 3.5.12 common mode rejection ratio ....................................................... 3.5.13 common mode signal..................................................................3.5.9 common mode voltage ................................................................3.5.10 computer monitoring system..........................................................3.4.5.1 computer systems....................................................................3.4 computer supervisory................................................................3.4.5 computersupervisory system..........................................................3.4.5.2 configuration ..................................................................... 3.4.6.9 console.............................................................................4.8.4 continuous control system ......................................................... 3.3.18 control ........................................................................... 3.3control board.......................................................................4.8.3control building....................................................................4.7control display.....................................................................3.4.2.7 control mode........................................................................4.2.1control room....................................................................... 4.7.2control station.................................................................... 3.4.6.4 control valve.......................................................................3.3.22control with fixed set-point........................................................3.3.5 control with variable set-point.....................................................3.3.6 conventional true value[of a.quantity] .............................................3.2.11 A/D, D/A onverter...................................................................3.4.4.3 closed loop control.................................................................3.3.4critical flame......................................................................4.6.1.12D data................................................................................3.4.1.8data acquisition....................................................................3.4.5.3data acquisition station............................................................3.4.6.5 data base...........................................................................3.4.1.15data highway........................................................................3.4.1.12data processing.....................................................................3.4.5.4data record, data logging...........................................................3.4.5.5 dead band...........................................................................4.3.4.24 degree of protection................................................................4.8.13 design of thermal power plant automation........................................... 4.2 detecting device....................................................................3.2.21 deviation alarm.....................................................................4.5.3 diagnostic and test software........................................................4.9.15 differential expansion monitor......................................................4.6.2.3 digital electro-hydraulic control (DEH).............................................4.3.4.3 digital computer....................................................................3.4.1.2 digital input (DI)..................................................................3.4.3.1 digital output (DO).................................................................3.4.3.3 digital signal......................................................................3.4.2.2direct digital control (DDC)........................................................3.3.16 discontinuous control system........................................................3.3.19 display.............................................................................3.4.2.4display for window..................................................................3.4.2.13 display instrument..................................................................3.2.26CRT display.........................................................................3.4.5.14 distributed control system (DCS)....................................................3.4.6 droop...............................................................................4.3.4.23Eeddy current probe..................................................................4.6.2.9 electric automation.................................................................3.1.2 electric control building ..........................................................4.7.3 electric-net control room...........................................................4.7.7 electro-hydraulic control (EHC).....................................................4.3.4.2 electro-hydraulic converter........................................................ 4.3.4.19electronics room....................................................................4.7.8 elevation flame detection...........................................................4.6.1.10 emergency trip system (ETS).........................................................4.3.4.8 engineer station....................................................................3.4.4.11 error...............................................................................3.2.12error of indication.................................................................3.2.13Ffast cut back (FCB).................................................................4.6.4fast valving........................................................................4.3.4.18 fault...............................................................................3.5.6 feedforward control.................................................................3.3.7feed-water control..................................................................4.3.2.1 fiducial error..................................................................... 3.2.14 firmware............................................................................3.4.1.24first out...........................................................................4.5.5 flame...............................................................................4.6.1.4flame envelope......................................................................4.6.1.5flame detector......................................................................4.6.1.7fossil fired power plant simulator..................................................4.9.1 fuctional fidelity..................................................................4.9.5fuel control........................................................................4.3.2.5fuel trip...........................................................................4.6.1.3full furnace flame detection........................................................4.6.1.11full scope high realism simulator...................................................4.9.2 function group control..............................................................4.4.1.1 function key........................................................................3.4.4.5furnace pressure contro.............................................................4.3.2.3 furnace purge.......................................................................4.6.1.15 furnace safetyguard supervisory system (FSSS).......................................4.6.1 fuzzy control.......................................................................3.3.10Ggeneric simulator...................................................................4.9.4H hardware............................................................................3.4.1.23hard copy...........................................................................3.4.4.2historical trend display............................................................3.4.2.10Iindication [of a measuring instrument]..............................................3.2.9 indicator ˈindicating instrument ...................................................3.2.27 individual burner flame detection...................................................4.6.1.9 information.........................................................................3.4.1.9input device ˈinput unit............................................................3.4.3.7 input/output ˄I/O ˅.................................................................3.4.3input-output device, input-output unit..............................................3.4.3.9 input variable..................................................................... 3.2.5integrating instrument .............................................................3.2.29intelligent terminal................................................................3.4.1.18interface ......................................................................... 3.4.1.10interlock ......................................................................... 4.6.3interlock control ................................................................. 4.6.6intrinsic error ................................................................... 3.2.16instructor station................................................................. 4.9.8instructor station software ........................................................4.9.14 I/O interface eguipment ............................................................4.9.12 Kkeyboard............................................................................3.4.4.4keyphasor transducer .............................................................. 4.6.2.8Llocal areanetwork (LAN)............................................................ 3.4.1.14 life................................................................................3.5.5light pen...........................................................................4.4.8limit alarm.........................................................................4.5.2load control of ball mill ......................................................... 4.3.3.3 load governing......................................................................4.3.4.10load limit .........................................................................4.3.4.11local control...................................................................... 4.2.2local control room ................................................................ 4.7.5logic control ..................................................................... 3.3.14loss of all flame ................................................................. 4.6.1.8loss of flame to a corner ..........................................................6.1.13。
热控第一章_热工自动化基础

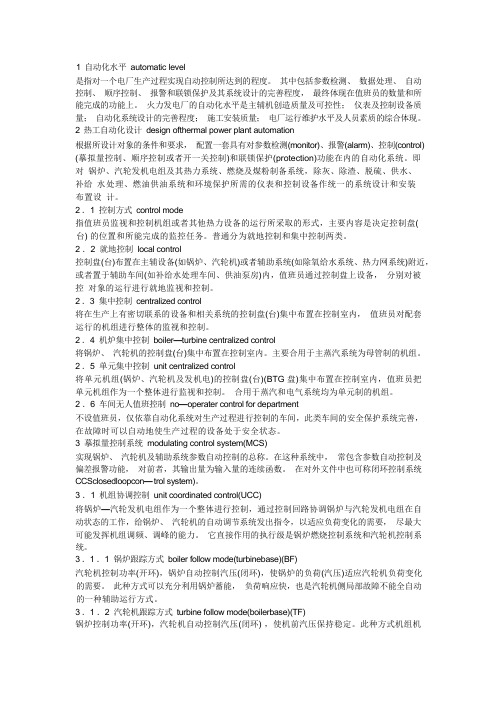
图1-3 汽包水位自动控制系统示意图
图1-4 汽包水位பைடு நூலகம்动控制原理框图
5
自动控制系统可以由以下几个部分组成: 测量变送器: 用来测量被调量,并把被调量转换为与之
成比例的某种便于传递和综合的信号。 给定元件:用来设置被调量的给定值或与该给定值对应
的电信号。 调节器:接受被调量信号和给定值比较后的偏差信号,
8
开环控制系统(也称前馈控制系统): 控制设备和控制对象在信号关系上没有形成闭合回路 的控制系统,其被控量没有反馈到控制设备的输入端。 特点: 按扰动进行控制,结构简单,精度差,只能克服 单一扰动。
复合控制系统:开环控制和闭环控制组合的一种控 制系统。
9
2.按闭合回路的数目分类 单回路控制系统:只有一个被控量信号反馈到控
[a0sna1sn1an1san]C(s) [b0smb1sm 1bm 1sam]R(s)
于是,由定义得系统传递函数为:
G (s ) C (s ) b 0 s m b 1 s m 1 b m 1 s b m M (s ) R (s ) a 0 s n a 1 s n 1 a n 1 s a n N (s )
a0d dtnnc(t)a1d dtnn 11c(t)an1d dtc(t)anc(t) b0d dtm mr(t)b1d dtm m 11r(t)bm1d dtr(t)bmr(t)
式中:c(t)是系统输出量,r(t)是系统输入量,a和b是与 系统结构和参数有关的常系数。
20
设r(t)和c(t)及其各阶系数在t=0时的值均为零,即零 初始条件,则对上式中各项分别求拉氏变换,并令C(s)= L[c(t)],R(s)=L[r(t)],可得s的代数方程为:
24
热控介绍(PPT)

• 汽机轴封系统功能组项; • .汽机蒸汽管路疏水阀门功能组项; • .辅助蒸汽系统功能组项; • .汽机油系统功能组项; • .汽机盘车功能组项; • .低加功能组项; • .高加功能组项; • .除氧器功能组项; • .开、闭式冷却水系统功能组项; • .低压缸喷水功能组项; • .凝汽器水位功能组项; • .凝汽器真空系统功能组项; • .凝结水功能组项; • .凝汽器胶球清洗功能组项; • .发电机断水保护功能组项; • .其它功能组项等。
运算、变换报警和人工设定等处理; • .开关量输入:处理周期为100ms,中断型开关量分辨率为1ms; • .二次计算:包括参数的和、差、平均值、变化率、最大值、最小
值和累计值; •.
• 报警处理:报警至少分为四级,LCD显示及报警打印可以由人工控制, LCD画面可以提供报警历史一览,报警数据可以打印输出,同时具有 报警闭锁功能;
热工自动化专业介绍
一、热工自动化组成
• 热工自动化(简称:热控)主要是对反映 热力生产过程运行状态的物理量、化学量 以及表征设备工作状况的参数自动地检查、 测量和监视。(主要项目为:压力、差压、 温度、流量、液位、导电度、PH值等)。
二、热控主要控制装置
• 1、DCS(分散控制系统)用于锅炉、汽机、发 电机控制(近几年随着DCS价格的不断下降, 水、灰、煤系统也开始采用DCS控制)。主要 进口品牌有:爱默生、ABB、西门子、Foxboro。 主要国产品牌:新华、和利时、国电智深、浙 大中控、南京科远。(卖成套设备)
FSSS(锅炉炉膛安全监控系统)
• 锅炉炉膛安全监控系统主要功能是保障燃烧系统安全可靠地启停和燃 烧器的正确切投及保证锅炉及其燃烧系统在各种工况(特别是变负荷 及低负荷)下安全稳定运行。
火力发电厂中的热控自动化技术
火力发电厂中的热控自动化技术摘要:当前科学技术不断的进步,自动化控制系统广泛应用到实践中,对于工业生产以及经营产生积极的作用,可以切实提高火电厂热工运行效率,促进综合效益的提升。
为了能够更好的发挥出电气自动化控制系统的优势,结合目前的火电厂热工系统的管控要求,寻找全新的发展道路。
因此,本文主要研究火力发电厂热控自动化技术,为我国的火电厂全面的发展和进步产生积极的促进作用。
关键词:火电厂;热工自动化;应用引言:火电厂在热工自动化系统中安装智能化的控制系统,采取分层递阶的控制性措施、模糊控制措施以及神经系统控制系统,考虑到热工自动化系统的运行特点以及要求,采用专业性的智能化控制方式,确保整个系统可以稳定的运行。
随着现代科学技术不断发展,智能化发展加速,智能控制技术在火电厂热工自动化控制的作用日益显现出来,提高自动化控制水平,对火电厂的全面发展产生积极的意义。
1 热工自动化技术概述随着当前科学技术不断发展,火电厂机组的建设速度加快,要想进行全面的内部控制,确保发电机组可以正常的运行,发挥出各个机组的运行性能,就要采取必要的措施进行发电机组的有效控制。
发电厂的热工自动化技术就是通过使用自动化控制系统以及自动化仪器进行发电厂的自动保护、自动报警以及自动控制。
在发电厂的热工自动化技术应用之下,可以有效的节约人力、物力以及劳动强度,还能提高机组的运行效率,保证发电厂的供电质量合格。
2.火电厂热工自动化对自动控制技术的应用2.1热工自动化技术自动控制理论的合理应用,就是在生产环节应用外加设备的方式提高生产设备运行状态,并且按照规定的设计参数开展自动生产。
而热工自动化技术应用下,通过可控化理论、信息技术、电子信息等技术进行火电厂参数的控制,而可以生产阶段参数的调整,达到自动化生产安全性要求,使用较少的资源可以生产更多的电能。
自动控制理论在投入使用后,确保火电厂的汽机、辅助设备等生产系统可以稳定的运行,达到高效、安全性标准,给企业带来较高的经济效益,也会产生较高社会效益。
热工自动控制系统1

项目一 热工控制系统 基本知识
任务三 调节器的动作规律及其 对过渡过程的影响
任务三 调节器的动作规律及其对过渡过程的影响
一、比例调节规律( P ) 二、积分调节规律( I )
1、开环控制(前馈控制)系统
特点:1)根据扰动大小对被控 量进行调节; 2)控制作用及时,结构 简单; 3)调节效果未知,控制 精度差,只能克服单一扰动。
闭环控制(反馈控制)系统 系统中的被调量反馈到输入端作为调节器产生控制作用的依据。 只要被调量的偏差存在,控制设备就不停地向控制对象施加控制作用, 直到被调量符合要求为止。单元机组自动控制系统大多属于闭环控制 系统。 1)根据被控量与给定值的偏差进行调节,控制精度高;
3、综合自动化阶段(计算机控制阶段):
(1)集中型计算机控制:用一台计算机实现几十甚至几百个控制回路 和若干个过程变量的控制、显示及操作、管理等。 (2)分散型计算机控制:指控制过程采用的系统是一种控制功能分散、 操作管理集中、兼顾复杂生产过程的局部自治与整体协调的新型分布 式计算机控制系统(又称分散控制系统) (3)综合自动化:是一种集控制、管理、决策为一体的全局自动化模 式 计算机控制的发展: 1、集中型计算机控制:可靠性要求高,风险高。(DDC) 2、分散型计算机控制:微机局部控制,协调困难。
自动控制系统中常用术语
1、被控量(被调量):表征生产过程是否符合要求需要 加以控制的物理量。 2、给定值:按生产要求被控量必须维持的希望值。 3、调节量:由控制作用改变并对被调量进行调节的物理 量。 4、扰动:引起被控量偏离给定值的各种原因。 按来源分为外扰和内扰。
论钢铁厂热工仪表自动化技术

论钢铁厂热工仪表自动化技术摘要:现代化的今天,钢铁厂生产运行越来越离不开热工仪表自动化技术,该项技术的有效应用能够为生产作业保驾护航,避免生产过程受到不良因素的影响,提高生产质量和生产效率。
基于此,本文将详细介绍热工仪表自动化技术,探究钢铁厂热工仪表自动化技术的应用,希望能够起到一定的参考作用。
关键词:钢铁厂;热工仪表;自动化;热工仪表则是在生产过程中对压力温度、密度、流量等方面进行显示和测量的仪表。
在先进技术的加持下热工仪表呈现出自动化的特点,能够按照钢铁厂生产标准,跟踪监控生产作业实际情况,一旦发现相关参数变化超出合理范围,将整合相关数据,并对其予以分析,找出原因,发布虚拟信号,通过操作热工仪表自动化设备,合理调控生产设施,保证钢铁厂生产作业始终良好,促使钢铁厂获得较高的经济效益,能够持续健康稳定的发展。
所以,钢铁厂负责人应当将热工仪表自动化技术视为本厂稳定运行的基石,详细了解本厂生产运行实际情况,明确存在的生产不足,合理规划和设计该项技术的应用,以便最大限度地发挥该项技术的作用,稳步推动本厂良好发展。
一、热工仪表自动化技术的说明对于钢铁厂建设与生产来讲,热工仪表自动化技术的应用是非常关键的。
它是通过科学设计和安装电缆,实现对钢铁厂的自动化控制,保证钢铁厂生产状态良好,创造较高的经济效益,推动钢铁厂良好发展。
热工仪表自动化技术之所以具有较高的应用价值,主要是有智能化技术的支持,比如现代智能技术、电子信息技术、计算机技术等等,能够对钢铁厂整个操作系统予以有效的监督与控制,搜集、整理及分析生产相关信息数据,从而了解钢铁厂运行实际情况,发布控制指令,对操作系统予以有效的控制,保证其长期良好运行,实现安全、高效、高质生产的目的[1]。
1.热工仪表自动化技术的安装流程虽然热工仪表自动化技术具有较高的应用价值,但要想使其能够充分发挥作用,需要保证其配套设施状态良好,始终能够稳定、高效地运行。
当然,要想真正做到这一点,需要按照安装流程,规范且标准地安装配套设备。
火力发电厂热工自动化常用术语
1 自动化水平automatic level是指对一个电厂生产过程实现自动控制所达到的程度。
其中包括参数检测、数据处理、自动控制、顺序控制、报警和联锁保护及其系统设计的完善程度,最终体现在值班员的数量和所能完成的功能上。
火力发电厂的自动化水平是主辅机创造质量及可控性;仪表及控制设备质量;自动化系统设计的完善程度;施工安装质量;电厂运行维护水平及人员素质的综合体现。
2 热工自动化设计design ofthermal power plant automation根据所设计对象的条件和要求,配置一套具有对参数检测(monitor)、报警(alarm)、控制(control) (摹拟量控制、顺序控制或者开一关控制)和联锁保护(protection)功能在内的自动化系统。
即对锅炉、汽轮发机电组及其热力系统、燃烧及煤粉制备系统,除灰、除渣、脱硫、供水、补给水处理、燃油供油系统和环境保护所需的仪表和控制设备作统一的系统设计和安装布置设计。
2 .1 控制方式control mode指值班员监视和控制机组或者其他热力设备的运行所采取的形式,主要内容是决定控制盘(台) 的位置和所能完成的监控任务。
普通分为就地控制和集中控制两类。
2 .2 就地控制local control控制盘(台)布置在主辅设备(如锅炉、汽轮机)或者辅助系统(如除氧给水系统、热力网系统)附近,或者置于辅助车间(如补给水处理车间、供油泵房)内,值班员通过控制盘上设备,分别对被控对象的运行进行就地监视和控制。
2 .3 集中控制centralized control将在生产上有密切联系的设备和相关系统的控制盘(台)集中布置在控制室内,值班员对配套运行的机组进行整体的监视和控制。
2 .4 机炉集中控制boiler—turbine centralized control将锅炉、汽轮机的控制盘(台)集中布置在控制室内。
主要合用于主蒸汽系统为母管制的机组。
2 .5 单元集中控制unit centralized control将单元机组(锅炉、汽轮机及发机电)的控制盘(台)(BTG 盘)集中布置在控制室内,值班员把单元机组作为一个整体进行监视和控制。
《热工自动化基础》课件

流量计
用于测量和控制热工系统的流量参数,常用种类 有电磁流量计、涡轮流量计、超声波流量计等。
压力传感器
用于测量和控制热工系统的压力参数,常用种类 有压力传感器、压力变送器等。
液位计
用于测量和控制热工系统的液位参数,常用种类 有浮球、悬臂、水位控制阀等。
热工自动化系统控制方法
1
开关控制
开关控制是一种简单的控制方法,通过电气线路的通断控制实现对热工系统的控制。
2
比例控制
比例控制是一种基于反馈原理的控制方法,通过改变执行元件的开度或关闭程度实现对热工 系统的控制。
3
PID控制
PID控制是一种基于比例、积分和微分三种算法的控制方法,通过对系统的实时响应和超前 修正来实现对热工系统的控制。
热工自动化的基本概念
什么是热工自动化?
热工自动化是指使用先进的控制技术Байду номын сангаас自动化设备 来控制和优化工业热系统的过程。
热工自动化的应用领域
热工自动化广泛应用于石油化工、电力、食品饮料、 制药、建材等行业,例如自动恒温控制、温度调节、 质量保证、能量节约、自动监测和报警等。
热工自动化常用仪表设备
温度传感器
热工自动化基础
这是一门介绍热工自动化基本概念、常用仪表设备和系统控制方法的课程。 我们将探讨热工自动化的应用领域、设计考虑因素和未来发展前景。
课程目标和授课内容
课程目标
让学生了解热工自动化的基本概念和应用领域,掌握热工自动化常用仪表设备和控制方法, 提高热工自动化系统设计和优化的能力。
授课内容
1. 热工自动化基本概念和应用领域;2. 热工自动化常用仪表设备;3. 热工自动化系统控制方 法;4. 热工自动化系统设计考虑因素;5. 热工自动化技术的未来发展。
电厂热工自动化技术《任务2-1 汽温控制对象特性试验—工作任务单》
三、相关资源
〔1〕?DL/T 774-2021火力发电厂热工自动化系统检修运行维护规程?
〔2〕?DL/T 657-2021火力发电厂模拟量控制系统验收测试规程?
〔3〕朱北恒主编.火电厂热工自动化系统试验.北京:电力出版社,2021年
〔4〕侯殿来著.模拟量控制技术及其应用.北京:电力出版社,2021年
〔3〕掌握汽温控制对象动态特性试验的步骤。
2能力目标:
〔1〕能根据行业技术标准拟定动态特性试验方案;
〔2〕能根据试验方案完成汽温控制对象动态特性试验;
〔3〕会填写试验报告;
〔4〕能根据试验结果分析汽温控制对象动态特性特点。
3素质目标:
〔1〕养成平安生产意识;
〔2〕养成严谨求实的工作作风;
〔3〕养成严格执行国家、行业及企业技术标准的意识;
通常,在机组投运前、锅炉A级检修或控制策略改变时,需要进行汽温动态特性试验。试验宜分别在70%和100%两种负荷下进行,每一负荷下的试验宜不少于两次,记录试验数据和曲线,并提交试验报告。
二、教学目标
1知识目标:
〔1〕熟悉汽水系统工艺流程,理解过热器和再热器在热力系统中的作用;
〔2〕理解汽温控制对象动态特性的特点;
权重
评分
总评
学习态度
出勤情况,积极主动参与学习
教师
10
课堂发言
课堂提问语言表达清晰、流利
10
工作方案
方案详细,步骤正确
10
平安生产
操作标准,平安意识强,措施得当
10
工作报告
数据真实,内容完整,格式标准
2021
团队协作
与小组成员一起分工合作,不影响学习进度
小组成员
火电厂热工仪表自动化技术的应用探讨

火电厂热工仪表自动化技术的应用探讨火电厂是指利用燃煤、燃气、石油等能源进行燃烧发电的生产设施。
而火电厂热工仪表自动化技术是指通过对火电厂热工过程中的参数进行监测、控制和调节,以提高热电厂的稳定性、安全性和经济性的技术手段。
随着科技的不断发展,热工仪表自动化技术在火电厂中的应用日益广泛,其作用不可忽视。
本文将从火电厂热工仪表自动化技术的基本原理、应用实例和发展趋势这三个方面进行探讨。
一、火电厂热工仪表自动化技术的基本原理火电厂热工仪表自动化技术是建立在控制理论、仪表技术和计算机技术的基础之上的。
它利用现代计算机技术,通过对火电厂的各项工艺参数进行实时监测、分析和调节,以实现对火电厂热工过程的精确控制。
具体来说,火电厂热工仪表自动化技术主要包括以下几个方面的内容:1. 传感器技术:火电厂热工控制系统中需要大量的传感器来对各项参数进行监测,例如温度、压力、流量等。
传感器技术是火电厂热工仪表自动化技术的核心之一。
传感器将物理量转换成电信号,然后通过信号调理器将其转换成标准信号输出给控制系统。
2. 控制系统:火电厂热工仪表自动化技术主要依靠控制系统来实现对火电厂热工过程的自动控制。
控制系统是由计算机、控制器、执行器等组成,通过对传感器采集的数据进行处理,实现对温度、压力、流量等参数的精确控制。
3. 数据采集与处理:火电厂热工仪表自动化技术通过对火电厂各项参数进行实时采集,然后利用计算机进行数据处理和分析,以实现对热工过程的优化控制。
火电厂热工仪表自动化技术在实际生产中应用十分广泛,它不仅提高了生产效率,降低了生产成本,还提高了生产安全性和稳定性。
下面将以某火电厂的热工仪表自动化技术应用实例为例进行介绍。
某火电厂引进了先进的热工仪表自动化技术,对其锅炉进行了优化控制。
通过利用高精度的传感器对锅炉内的温度、压力、流量等参数进行实时监测,并将监测数据传输给控制系统,控制系统根据实时数据自动调节燃烧系统、给水系统等设备,实现了对锅炉燃烧、水平等过程的精确控制。
热工自动调节(dcs,ccs,汽温)
4 DCS的结构和组成
硬件
操作站
一般采用桌面式通用计算机 组成:主机、显示器、键盘、鼠标、打印机等 用于过程监视、操作、管理
工程师站
一般比操作站“高档” 组成:主机、显示器、键盘、鼠标、打 印机等 用于系统组态、配臵、维护 可兼作操作站
现场控制站
DCS的核心 组成
2 DCS的产生和发展
仪表控制 优点
局部故障不影响全局 监控和操作的要求越来越高 功耗高、体积大、故障率高 难实现先进控制,无法实现过程优化
缺点
计算机控制 优点
监控和操作简单 功耗低、体积小、故障率低 能够实现先进控制和过程优化
缺点
局部故障会影响全局
PLC控制 优点
1. 第一代DCS (初创期)
监控计算机
CRT操作中心
高 速 数 据 通 道
过程控制单元
数据采集装置
系统构成
数据采集单元 过程控制单元 CRT操作站 上位管理计算机 高速数据通道
注重功能的实现 使用专用软、硬件, 价格昂贵 没有统一标准,开放 性差
2. 第二代DCS(成长期)
3. 第三代DCS(扩展期)
主计算机
操作站
节点站
节点站
网桥
它的主要变化是局部网络采用 了MAP等工厂系统通用的总线 型通讯协议,可直接与智能仪 表进行通讯,软硬件的变化很 大,但总体结构变化不大。
智能变送器
智能仪表
系统构成 通讯网络 现场控制站 操作站/工 程师站 网络连接器
热工自动化基础试题及答案

热工自动化基础试题答案在后面一、单选题(共25题)【 1 】. 根据微小误差准则,为使测量仪表所固有的误差不影响测量结果的准确性,往往选用的测量仪表的误差小于被测量允许误差的______。
在检定工作中,应选择标准表与被检表的允许误差之比,满足______的关系。
A.1/2~1/3 1/3~1/10B.1/3~1/5 1/3~1/5C.1/5~1/7 1/5~1/7D.1/3~1/7 1/3~1/7答案:()【 2 】. 对一些只知误差出现的大致范围,而不清楚分布规律的误差,在处理时也常按______分布规律对待。
A.矩形B.正态C.三角形D.均匀答案:()【 3 】. 对测量仪器而言,测量仪器的偏移就是测量仪器的______误差。
测量仪器的偏移通常用适当次数重复测量的______的平均来估计。
A.附加误差基本误差B.系统示值误差C.固定误差绝对误差D.粗大误差读数误差答案:()【 4 】. 不能确定是违反计量法行为的,是______。
A.未执行国家计量检定规程B.现场试验用过的标准仪器用于计量检定C.使用超过检定周期的计量器具D.使用检定不合格的、没有检定的计量器具答案:()【 5 】. 根据有效数字运算规则,69.62+3.78936+0.6477=______;若0.0011335取四位有效数字,应写作______。
A.74.05 0.0011B.74.06 0.001134C.74.057 0.011D.74.0576 0.001133答案:()【 6 】. 实验标准[偏]差s(qi)和平均值的实验标准[偏]差的自由度______,为______。
A.不同n和n-1B.相同n-1C.相同n-2D.不同n-1和n-2答案:()【7 】. 不服从均匀分布规律的是______。
A.工作环境温度引起的误差B.数字仪表的量化误差(±1)和数字计算中舍入的修约误差C.一些只知误差出现的大致范围,而不清楚分布规律的误差D.仪器的刻度差引起的误差和最小分辨率限制引起的误差答案:()【8 】. 测量结果服从正态分布,按一倍标准偏差计算极限误差时,测量结果中相应的概率是______%。
电厂热工过程自动化基本知识
电厂热工过程自动化基本知识第一节概述1、电厂热工过程自动化主要内容1)自动检测,即对反映热工过程运行状态的物理量、化学量以及表征设备工作状态的参数进行自动的检查、测量和监视.2)自动调节,即自动维持一个或几个能够表征热力设备正常工作状况的物理量为规定值,消除因各种因素干扰和影响造成的运行工况偏离.3)自动保护,即在热力设备发生异常,甚至事故时能够自动采取保护措施,防止事故进一步扩大,或保护设备不受损坏.4)程序控制,即根据预先拟定的程序及条件,自动地对机组进行启动、停止及其他一系列操作.2、自动调节基本概念在电力生产过程中,为了保证生产的安全性、经济性,保持设备的稳定运行,必须对标志生产过程进行情况的一些物理参数进行调节,使它们保持在所要求的额定值附近,或按照一定的要求变化,如汽轮机转速,锅炉蒸汽温度、压力,汽包水位,炉膛负压等.在设备运行中这些参数总要经常受到各种因素的影响而偏离额定值规定值,此时,用一整套自动控制装置来实现操作的过程,就是自动调节.例如,在锅炉运行过程中,锅炉出口主汽压是锅炉进出热量平衡的标志,汽压的变化表示锅炉的蒸发量和汽轮机的耗汽量不相适应,这就意味着锅炉燃料燃烧产生的热量与产生一定蒸汽所需的热量不相适应,因此,汽压是表征锅炉运行状况的一个重要参数.通常希望将汽压保持在某一规定的数值,运行中,运行人员必须经常地监视仪表,监视汽压的变化.若由于某种原因如汽轮机负荷变化,汽压偏离所规定的数值,那么运行人员就要进行手动操作,调整锅炉的燃料量,使锅炉产生的蒸汽适应汽轮机负荷的需要,使汽压恢复到规定数值.这里,锅炉是被调节的设备,称为调节对象;需要调节的物理量汽压称为被调量;被调量的汽压的规定数值称为给定值或目标值;引起被调量汽压偏离给定值的各种原因比如汽轮机负荷的变化,锅炉燃料量的变化等称为扰动;调整燃料量的装置如燃油阀、制粉系统等称为调节机构;由调节机构控制被调量的作用称为调节作用;随调节机构动作而改变数量的燃料量就是调节量.调节过程的实质是随时检测被调量偏差并纠正偏差的过程,以维持被调量等于或接近于给定值.1、自动调节装置实现自动调节作用所需要的自动调节装置主要有:1)测量单元变送器,用来测量被调量的大小,并能把被调量水位、温度、压力和流量等转换成与之成比例或其他固定的函数关系并便于远距离传送和综合的测量信号.2)调节单元调节器,接受测量单元送来的被调量信号,并把它与给定值进行比较,当被调量偏离给定值时,调节单元将偏差信号按它的大小和方向以预定的规律进行运算例如比例、积分、微分等,根据运算结果发出一定规律的调节信号给执行器.3)执行单元执行器,按照调节单元发出的调节信号去移动调节机构,改变调节量.汽轮机负荷比较偏差值调节作用调节给定值PO量简图:锅炉汽压自动调节原理图当调节对象锅炉受到扰动,被调量偏离给定值后,测量单元压力变送器检测出被调量的变化,被调量与其设定值比较后的偏差值通过调节单元进行放大、运算和综合,调节单元输出的信号控制执行器,改变调节器,直到被调量恢复到给定值或接近给定值为止.第二节自动调节系统生产流程过程中存在着两种流程:1物质和能量流程,如蒸汽锅炉中燃料燃烧产生的热量被受热面中的水吸收,水变成蒸汽,蒸汽经过过热器加热后送到汽轮机作功;2信息流程,如在锅炉的汽压自动调节中,为了维持汽压为规定值,自动调节检测汽压的偏差,然后根据偏差控制燃料量,使燃料量满足产生一定蒸汽量的需要.汽压调节对象和自动调节装置是通过信息的传递相互连接而构成自动调节系统的,这样,研究自动调节系统就是研究信息的流程,即研究信号间的相互连接、传递和转换问题.1、调节系统分类按信号馈送方式分类1)反馈调节系统.是最基本的调节系统,按被调量与给定值的偏差进行调节,调节的目的是尽可能地减小或消除被调量与给定值之间的偏差.参见锅炉汽压自动调节原理图.反馈调节系统属于闭环调节系统.由于调节系统是按被调量与给定值的偏差进行调节的,因此,在调节对象受到扰动作用时,只有在被调量出现偏差后才开始调节,调节只是为尽快地消除偏差.例如讲BFG热值的变化;燃料热值的变化设定值与实际值发生变化时引起锅炉主蒸汽压力变化的调节过程.2)前馈调节系统.调节器直接根据扰动信号进行调节,扰动是调节的依据.由于该系统没有被调量的反馈信号,不构成闭环回路,故称为开环调节系统.λt对象简图:前馈调节系统方框图扰动λt是引起被调量Ct变化的原因,前馈调节器根据扰动进行调节,就可能及时抵消扰动λt对被调量Ct的影响,从而使被调量保持不变.但由于是开环系统,调节效果无法检查,调节结束后不能保证被调量等于给定值,所以前馈调节系统在实际生产过程中是不能单独应用的.例如送风量的变化是引起炉膛压力波动的扰动,吸风调节采用送风前馈信号.3)前馈—反馈调节系统复合调节系统在反馈调节系统中加入对于主要扰动的前馈调节,构成了前馈—反馈调节系统.+-简图:复合调节系统方框图当扰动发生后,前馈调节的作用是及时地补偿扰动对被调量的影响,而反馈调节的作用则是保证被调量的偏差在允许的给定范围内.因此前馈——反馈调节系统有较好的调节效果.2、调节系统分类按给定值信号特点分类1)恒值调节系统在调节系统工作过程中,被调量的给定值恒定不变,从而使被调量保持为某一固定数值.这是热工过程自动调节中应用最多的一种调节系统,如锅炉的过热蒸汽温度、压力、汽包水位等自动调节系统都是恒值调节系统.2)程序调节系统被调量的给定值是一个已知的时间函数,调节的目的是保证被调量按预先确定的时间函数来改变.例如,锅炉在滑压启动过程中,汽压和汽温要按预先给定的曲线升高,即按一定的升温、升压曲线启动,就要采用程序调节系统.3)随动调节系统被调量的给定值往往是无规律的,按事先不能确定的一些外来因素而改变.调节的结果是使被调量尽快和准确地跟随给定值变化.例如,在汽轮机启动过程中,采用计算机对汽轮机转速实现最优升速控制.汽轮机的最优升速率不是预先给定的,而是通过计算机按过热汽温、再热汽温、汽缸壁温等参数在线计算出热应力的数值,与允许的热应力进行比较,同时参照升速时汽轮机的振动、串轴等参数确定的,这样可缩短启动时间.计算机控制主汽门的开度,使汽轮机转速跟随最优升速率而升高.4)比值调节系统维持两个变量之间的比值保持一定数值.例如锅炉燃烧过程中,要求空气量随燃料量的变化而成比例变化,这样,才能保证经济燃烧.因此,对于锅炉燃烧经济性的调节,要求采用比值调节系统.3、自动调节系统的过渡过程在自动调节系统中,把被调量不随时间变化的平衡状态称为静态或稳态,把被调量随时间变化的不平衡状态称为动态.当系统处于静态时,扰动等于零,给定值不变,调节器和调节阀的输出都暂时不改变,这时被调量也就保持不变.当有扰动发生时,系统平衡被破坏,被调量偏离给定值,于是调节器控制调节阀,改变调节量,使被调量回到给定值,系统恢复平衡状态.这样从扰动发生,经过调节,直到系统重新建立平衡的这段过程,称为调节系统的过渡过程,或称为调节过程.一个调节系统在不同形式和幅度的扰动作用下,其调节过程是不一样的.在实际生产过程中可能遇到的扰动形式是多种多样的.为了比较调节系统工作品质的好坏,分析系统工作品质能否满足生产过程的需要,通常要选定一种比较典型的或经常出现的扰动形式,作为研究调节系统工作品质的标准输入信号.在热工过程自动调节系统中,最常用的是单位阶跃函数.在阶跃扰动作用下,过渡过程有四种基本形式:1衰减振荡过程,即被调参数经过一段时间的振荡后,能很快趋向于一个新的平衡,是比较理想的;2非周期过程,即被调参数没有振荡,单调地趋向于一个新的平衡,是一个稳定的过程;3扩幅振荡过程,即被调参数的变化幅度越来越大,直到超出限值,或受到限幅保护装置的限制为止,是一种不稳定的过程;4等幅振荡过程,被调参数的数值以及执行机构的位置都作等幅振荡,幅值既不衰减也不发散,是一种边界稳定过程.4、衡量调节过程指标1稳定性:调节过程的稳定性是对调节系统最基本的要求.只有稳定的系统才能完成正常的调节任务,不稳定的系统在工程上不能采用的.2快速性:指调节过程持续时间的长短.一般希望过渡过程时间越短越好,以避免在调节过程中出现前波未平,后波有起,被调量长期不能稳定在给定值附近的情况.3准确性:指被调量偏差的大小,它包括动态偏差和静态偏差.对于一个调节系统,必须首先保证其稳定性好,同时兼顾调节的快速性和准确性.第三节自动调节器基本调节规律自动调节器是构成自动调节系统的核心部分,它主要包括测量单元、调节单元、执行单元.测量单元和执行单元的动态特性一般都可近似看作为比例环节或时间常数很小的惯性环节,因而自动调节器的调节规律主要是指调节单元的动态性质,它直接影响着自动调节系统的调节品质.1、三种基本调节作用1)比例调节作用比例调节作用是指调节器的输出与输入成比例关系.动态方程为μt=Kpet.其中:μt为执行机构位移即调节器的输出;et为给定值与被调量的偏差,et=rt-ct;Kp为比例系数或比例增益.比例调节作用的动作规律是:执行机构的位移量μt与偏差et的大小成比例,即偏差越大,执行机构输出位移也越大;偏差的变化速度越大,执行机构输出位移的速度也越大.比例调节作用的特点是:动作快,对干扰能及时和有很强的抑制作用,但由于执行机构的位移与被调量的偏差有一一对应的关系,所以调节的结果是被调量存在着静态偏差.2)积分调节作用积分调节作用是指调节机构的位移量的变化速度dμ/dt与偏差信号et成比例的作用.动态方程式为:μt= 1/Tt edt0i其中:μt为执行机构位移即调节器的输出;et为给定值与被调量的为积分时间.偏差,et=rt-ct;TI积分调节作用的动作规律是:只要对象的被调量不等于给定值即偏差存在,那么执行机构就会不停地动作,而且偏差的数值越大,执行机构的移动速度就越大,只有当偏差等于零时即被调量等于给定值,调节器的输入信号为零,调节过程才能结束,执行机构才停止动作,调节系统才能平衡.积分调节作用的突出优点是能消除静态偏差,因为只要被调量存在偏差,调节作用变随时间不断加强,直至偏差为零.在被调量偏差消除后,由于积分规律的特点,执行机构将停留在新的与负荷变化相适应的位置上.缺点:由于积分调节作用是随时间而逐渐增强的,与比例调节作用相比过于迟缓,所以在改善静态品质的同时却恶化了动态品质,使过渡过程的振荡加剧,甚至造成系统不稳定.所以,在实际生产过程中几乎不采用单纯的积分调节作用.3)微分调节作用微分调节作用是指调节机构的位移量与被调量偏差的变化速度成正比,它的动态方程为:μt=Tdde/dt,其中:μt为执行机构位移即调节器的输出;et为给定值与被调量的偏差,et=rt-ct;Td为微分时间.微分调节作用的特点是:与比例和积分调节作用相比,它是超前的调节作用,因为在调节过程刚开始时,被调量的偏差小,但其变化速度却较大,可使执行机构产生一个较大的位移,有利于克服动态偏差.但是,当调节过程结束,即当偏差的变化速度等于零时,微分调节器的输出也将等于零,即执行机构的位置最后总是回复到原来的数值,这就不能适应负荷的变化,不能满足调节的要求.因此,只有单纯微分调节作用的调节器,在工业上是不能使用的.2、自动调节器典型调节规律1)比例调节器P调节器采用比例调节器的调节是有差调节.调节器的比例增益的选择有其两重性.比例增益Kp 越小比例带越大,Kp=1/δ,调节器的动作幅度越小,调节过程越稳定,但被调量的静态偏差增大.反之,比例增益Kp越大比例带δ越小,调节器的动作幅度越大,被调量的静态偏差减小,但调节过程易出现振荡,稳定性降低.2)比例积分调节器PI调节器在比例积分调节器中,当改变比例带δ的数值时,既改变比例作用,也改变积分作用.而两个作用的比值则不变;改变积分时间Ti的数值,只是改变积分作用的大小,从而改变了调节器中比例作用和积分作用的相对大小.比例积分调节器兼有比例调节作用和积分调节作用的特点.调节系统中采用这种调节器时,由比例作用保证调节过程的稳定性,增大比例带δ数值,可以削弱振荡倾向,但比例带δ过大,将削弱调节作用,使调节过程的时间拖长;增大Ti 值使比例作用相对增强,也能削弱振荡倾向,但Ti值不宜过大,因为Ti值过大,调节作用的积分成分将过小,调节过程时间将很长.积分调节作用可保证调节结果无差,因此,比例积分调节器在工业上得到广泛的应用.3)比例微分调节器PD比例微分调节器有两个可以整定的参数.改变微分时间Td的数值只改变微分作用的大小,改变比例带δ的数值将同时改变比例作用和微分作用的大小,而两者的比值不变.如系统处于平衡状态,则微分作用消失,但比例微分调节器仍具有比例调节器的特点,即调节过程结束后,被调量存在静态偏差.如果对象存在较大的延迟和惯性,单纯采用比例调节器达不到调节的要求时,就可以引入微分调节器作用.只要微分作用的大小选择适当,不仅可以减小调节过程中被调量的动态偏差,也能减小调节过程的振荡倾向.4)比例积分微分调节器PID比例调节作用的特点是保证过程的稳定性;积分调节作用的特点是保证调节过程作无差调节;微分调节作用的特点是补偿调节对象的延迟和惯性.3、调节器调节规律对调节品质的影响1)比例调节器P不论是什么对象,采用比例调节器都是有差调节,比例带δ越大,静态偏差就越大.调节器的比例带δ增大,意味着在相同的被调量变化下,调节作用较小,因而在受到扰动后,被调量的动态偏差将增大.总之,比例调节器的比例带δ越大,系统的衰减率越大,过程越稳定;但是,增大比例带δ,将导致过程的动态偏差和静态偏差的增大.2)比例积分调节器PI比例积分调节器的主要优点是能靠积分作用消除静态偏差,因此,在热工过程自动化中得到了最广泛的应用.与比例调节器的比例作用相似,增加比例带δ可以增加系统的稳定性,越短,系统的稳定性下降越多.积分作用使系统的稳定性下降,积分时间Ti从提高系统稳定性的角度出发,需要加大比例带δ和增加积分时间T,i 然而比例带和积分时间过大时,调节器的调节作用减弱.3)比例积分微分调节器PID微分调节作用有助于克服迟延所造成的被调量的过大变化.比例积分微分调节器既能实现无差调节,又能改善调节过程的动态品质,在工业上得到了较广泛的应用.4、复杂调节系统1)串级调节系统串级调节系统的调节品质较好,在热工自动控制中得到了广泛的应用.对于时间常数较大,阶次较高和有较大迟延的调节对象,在某些场合下即使采用PID调节规律依然不能得到满意的调节品质,这时可采用串级调节系统.系统中除了主被调量外,还有一个辅助被调量,辅助被调量对调节作用的响应应比较迅速.例如锅炉过热汽温调节系统,当减温水量改变后,过热汽温的变化较慢,减温器出口汽温变化较快,这时就可把减温器出口汽温作为过热汽温调节系统中的辅助被调量,形成一个调节回路,构成串级调节系统.1对象Ⅱ CS- - 调节对象简图:串级调节系统方框图与单回路调节系统的区别在于有两个调节器,有两个闭合回路.由调节器Ⅰ和调节对象Ⅰ构成的回路称为副回路或内回路,调节器Ⅰ称为副调节器,调节对象Ⅰ的输出信号称为辅助被调量.由调节器Ⅱ、副回路和调节对象Ⅱ所构成的回路称为主回路或外回路,调节器Ⅱ称为主调节器,调节对象Ⅱ的输出信号称为主被调量,调节对象Ⅰ和调节对象Ⅱ统称是系统的调节对象.特点:1对副回路所受到的扰动具有很强的克服能力;2副回路起改善调节对象动态特性的作用,从而提高整个系统的调节品质.2)采用中间被调量微分信号的调节系统对于时间常数大,阶次高和迟延大的调节对象,为了改善调节品质,除了采用串级调节外,还可以采用引入中间被调量微分信号的调节系统.例如过热汽温调节系统,其中间被调量就是减温器后的汽温,汽温调节器除接受过热器出口温度信号外,还同时接受减温器后汽温的微分信号.简图:采用中间被调量微分信号的调节系统方框图特点是调节器除了接受调节对象的主被调量信号外,还接受一个中间被调量的微分信号.由于中间被调量的响应比主被调量快,因此,这个微分信号起着导前作用,以补偿主被调量的滞后.在稳态时,中间被调量微分信号等于零,调节器维持主被调量为规定值.3)前馈—反馈调节系统按被调量偏差进行调节的负反馈系统,当系统受到扰动时,调节器要等到被调量出现偏差后才开始调节,因而调节作用总是落后于扰动作用的.被调量产生偏差的原因是扰动,如果调节系统能直接按扰动进行调节,就有可能及时消除被调量的偏差,这种按扰动进行的调节称为前馈调节.前馈调节是开环调节,不构成闭合回路.一般采用前馈调节器实现局部补偿,以改善调节品质,同时采用反馈调节,以确保被调量在稳态时能恢复到给定值.一般,系统中存在着经常变动、可测而不可控的扰动时,反馈调节难以克服扰动对被调量的显着影响,这时为了改善调节品质,可以引入前馈调节.例如锅炉汽包水位调节系统,引入蒸汽流量前馈信号.蒸汽流量对被控水位来说就是一个可测而不可控的扰动信号.。
自动化专业术语
自动化专业术语3 基本术语3.1 自动化automation 采用检测与控制系统,对生产过程进行生产作业,以代替人工直接操作的措施。
对火力发电厂而言,是热力生产过程与电力发供电过程控制的总称。
在一些国家中称“仪表与控制” (instrument&lcontrol ,I&C) 。
3.1 .1 热工自动化thermopowerautomation 采用检测与控制系统对火力发电厂的热力生产过程进行生产作业,以代替人工直接操作的措施。
3.1 .2 电气自动化electricautomation 采用检测与控制系统对火力发电厂的发供电过程进行生产作业,以代替人工操作的措施二次回路(secondarycircuit) 。
3.1 .3 过程自动化processautomation 采用检测与控制系统对生产过程进行生产作业,以代替人工直接操作的措施。
3.1 .4 全过程自动化wholeprocessautomation 整个生产过程包括启动、调整、停机与故障处理及其后的重新启动等操作都能自动实现3.1 .5 监视monitoring 观察工艺系统及设备的运行参数及状态,以确认正确参数和状态,检出不正确参数和状态。
主要是通过测量系统的一个或多个变量并将被测值与规定值比较来完成的。
3.1 .6 监控supervision 对生产过程的监视和控制。
需要时,还包括保证可靠生产的安全保护操作。
3.1 .7 集中监视系统centralizedmonitoringsystem集中监视系统由传感器、变送器及计算机与必要的外部设备组成,是把一个车间或整个工厂的所有必要的参数集中到控制盘(台)上的仪表或CRT(参见3.4.4.7)上进行集中显示,以便于值班员进行分析处理或对生产过程进行控制。
3 . 1 . 8 系统工程systemengineering系统工程是为了最好地实现系统的目的,而对系统对象及其构成要素、组织结构、信息流、控制机构等进行分析和设计的技术。
热工自动化标准
DL/T 592-1996
火力发电厂锅炉给水泵的热工检测控制技术导则
6
DL/T 655-1998
火力发电厂锅炉炉膛安全监控系统在线验收测试规程
7
DL/T 656-1998
火力发电厂汽轮机控制系统在线验收测试规程
8
DL/T 657-1998
火力发电厂模拟量控制系统在线验收测试规程
9
DL/T 658-1998
火力发电厂顺序控制系统在线验收测试规程
10
DL/T 659-1998
火力发电厂分散控制系统在线验收测试规程
11
DL/T 701-1999
火力发电厂热工自动化术语
12
DL/T 774-2001
火力发电厂分散控制系统运行检修标准
13
DL/T 775-2001
火力发电厂除灰除渣热工自动化系统调试规程
14
DL 5004-1991
第4册热工自动化
定价:55元
1
DL 575.2-1999
控制中心人机工程设计导则第2部分:视野与视区划分
2
DL/T 589-1996
火力发电厂燃煤电站锅炉的热工检测控制技术导则
3
DL/T 590-1996
火力发电厂固定式发电用凝汽汽轮机的热工检测控制技术导则
4
DL/T 591-1996
火力发电厂汽轮发电机的热工检测控制技术导则
火力发电厂热工自动化试验室设计标准
15
SDJ 279-1990
电力建设施工及验收技术规范(热工仪表及控制装置篇)
16
SD 300-1988
10~20MPa双色水位计
17
GB/T 16701.1-1996
热工自动化介绍

热工自动化介绍热工自动化介绍:⒈热工自动化概述⑴热工自动化定义⑵热工自动化的应用领域⑶热工自动化的重要意义⒉热工自动化系统组成⑴主要设备和组件⑵控制系统⑶监控系统⑷数据采集与处理系统⑸传感器和执行器⑹通信网络⒊热工自动化系统的工作原理⑴信号采集与传输⑵数据处理与控制⑶监控与调节⑷故障诊断与维护⒋热工自动化系统的优势⑴提高生产效率⑵提高产品质量⑶降低生产成本⑷减少劳动力需求⑸提高工作环境安全性⒌热工自动化系统的设计与实施⑴系统需求分析⑵系统设计与方案选择⑶硬件设备选型与布局⑷软件开发与编程⑸系统调试与优化⑹系统验收与运维⒍热工自动化系统的应用案例⑴工业生产车间的燃烧控制系统⑵建筑物的暖通空调系统⑶能源发电厂的控制与监测系统⑷汽车制造工厂的生产线控制系统附件:本文档涉及的相关资料和技术文献。
法律名词及注释:⒈自动化:指利用电子技术、计算机技术、机械技术等先进技术,代替人工完成生产或工作过程的一种技术手段。
⒉控制系统:指通过采集传感器信号,经过处理和计算后,采取相应的控制策略和动作,控制生产工艺或设备的系统。
⒊监控系统:指对生产工艺或设备状态进行实时监测和记录的系统。
⒋数据采集与处理系统:指采集传感器数据并对其进行处理、存储和分析的系统。
⒌传感器:指能够将某种物理量转化为电信号输出的装置。
⒍执行器:指根据控制信号,对某一设备或工艺进行动作的装置。
⒎通信网络:指实现不同设备之间数据传输和通信的网络系统。
火电厂热工仪表自动化技术的应用探讨

火电厂热工仪表自动化技术的应用探讨1. 引言1.1 热电厂介绍热电厂是利用燃煤、燃油、天然气等能源进行燃烧,通过锅炉生成高温高压蒸汽,再由汽轮机发电的一种发电设施。
热电厂是我国主要的发电方式之一,其具有供热和供电两种功能,能够有效利用燃料资源,同时也是国家重要的基础设施之一。
热电厂通常由锅炉、汽轮机、发电机组、冷却系统等组成,其中锅炉是燃烧工艺的关键部分,负责将燃料燃烧后产生的热能转化为蒸汽能量。
汽轮机则通过接收高温高压蒸汽来驱动发电机转动,发电机则将机械能转化为电能输出。
热电厂的发电效率较高,能够满足广泛的用电需求,特别适用于大型能源需求场所。
目前,随着工业化进程的推进和人们对电力的需求不断增长,热电厂在国民经济中的地位愈发重要。
在热电厂的运行中,仪表自动化技术的应用将起到关键作用,提高了生产效率和安全性,促进了热电厂的可持续发展。
1.2 仪表自动化技术简述仪表自动化技术简述:仪表自动化技术是指利用现代化的仪表设备和自动控制系统,对火电厂的热工过程进行实时监测、控制和优化调节的技术。
在火电厂的生产过程中,各种参数的监测和控制是非常重要的,而传统的人工操作存在着诸多不足,如人为疏忽、反应速度慢以及数据记录不准确等问题。
而仪表自动化技术的应用,则能够有效地提高火电厂生产的效率和质量。
仪表自动化技术主要包括智能仪表、现场总线、远程监控和调度系统等多个方面。
智能仪表具有高精度、稳定性强、反应速度快等优点,能够直接与控制系统进行数据交换和信号传递。
现场总线则可以实现仪表设备之间的联动和数据共享,提高了系统的整体性能。
远程监控和调度系统则可以实现对火电厂热工过程的远程实时监测和控制,大大提高了生产管理的便利性和效率。
总的来说,仪表自动化技术的简述是利用先进的仪表设备和自动控制系统实现火电厂热工过程的实时监测、控制和优化调节,从而提高生产效率和质量。
2. 正文2.1 火电厂热工仪表自动化技术的意义火电厂是国家重要的能源基地,能够提供大量的电力供应。
热控基础知识

第一篇热控基础知识第一章热工自动化概述一、概述国民经济的不断增长,增加了对电力的需求量,电力工业向大电网、大机组、高参数、高度自动化的方向发展。
由于高参数、大容量机组发展迅速,因此对机组自动化的要求日益提高,以“4C”(计算机、控制、通信、CRT)技术为基础的现代火电机组热工自动化技术也相应得到了迅速的发展。
电力工业作为国民经济的基础性产业,有别于其它工业过程的主要特征是:电能的“发、输、供、用”必须同时进行,并保持瞬时的平衡。
与此同时,参与“发、输、供、用”的所有设备构成了部件众多、结构复杂、分布广阔的动态大系统。
在这个系统中发电机组处于系统的最底层。
改革开放以来,我国电力工业不断跨上新的台阶。
1987年全国发电装机容量突破1亿千瓦,1995年3月,装机容量突破2亿千瓦。
这期间中国发电装机容量和发电量先后跃过法国、英国、加拿大、德国、俄罗斯和日本,到1996年居世界第2位。
截至2004年5月底,我国发电装机容量突破4亿千瓦大关,达到40060万千瓦,年发电量超过1.9万亿千瓦时。
与此同时,提高发电机组的容量和参数也成为我国电力工业发展的重要方向:单机容量从建国初期的50MW,逐步发展到70、80年代的125~300MW,目前从300MW发展的600MW已经成为主流,现在继续向更大型化900MW,甚至超过1000MW发展。
蒸汽参数也由8MPa/535℃提高到17MPa/540℃,并随着超临界和超超临界技术的推广应用,最终可达到28MPa/580℃以上。
机组的大容量和高参数带来的是过程参数测量点的大量增加,相应的控制回路数和控制的复杂程度都大为提高,生产过程对控制精度的要求更为严格。
以一台600MW机组为例,其运行过程的监控点多达6000~7000个,各种控制回路有500~600个,用于控制系统组态的各种图纸就有几千张,这些艰巨而繁重的控制任务必须要有现代化的电站自动化技术作为支撑。
二、热工自动化的发展趋势热工自动化的硬件主要是由检测传感器及仪表(包括显示仪表)、调节控制装置或系统、执行器(包括执行机构和调节机构两部分)三大部分构成。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
弹性压力表是利用各种不同 形状弹性感压元件在被测压力 的作用下,产生弹性变形制成 的测压仪表。
热工自动化[1]
三、热工测量及仪表——压力计 压力变送器
压力传感器是以机械 结构型的器件为主,以 弹性元件的形变指示压 力。
热工自动化[1]
三、热工测量及仪表——水位计
水位计
玻璃管水位计
双色水位计
磁翻板水位计 低置水位计
电接点水位计
热工自动化[1]
三、热工测量及仪表——水位计 玻璃管水位计
热工自动化[1]
三、热工测量及仪表——水位计 磁翻板水位计
热工自动化[1]
三、热工测量及仪表——水位计 双色水位计
热工自动化[1]
三、热工测量及仪表——水位计 双色水位计
热工自动化[1]
三、热工测量及仪表——水位计 电接点水位计
部分子热运动的情况,分子热运动越快,物体的温度就越 高,反之温度就越低。
温度计的分类
膨胀式温度计
接
度计
热电偶温度计
工作原理
常用测量 范围
利用液体或固体受热时产生 热膨胀的特性
-200~700
利用封闭在一定容积中的气
体、液体或某些液体的饱和 蒸气受热时其体积或压力变
0~300
顺序控制系统(sequence control system,SCS),按 照生产过程工艺要求预先拟定的顺序,有计划、有步骤、 自动地对生产过程进行一系列操作的系统,称之为顺序控 制系统。
SCS也称程序控制,在发电厂中主要用于主机或辅机的 自动启停程序控制,以及辅助系统的程序控制。
主要用于控制泵、风机等辅机及辅助系统,按照运行规 律规定的顺序,自动启动或停止。
热工自动化[1]
三、热工测量及仪表——温度计 压力式温度计
热工自动化[1]
三、热工测量及仪表——温度计 热电阻温度计
热电阻温度计的测温是基于金属导体的电阻值随温度的 增加而增加这一特性来进行温度测量的。
热电阻大都由纯金属材料制成,目前应用最多的是铂和 铜,此外,现在已开始采用镍、锰和铑等材料制造热电阻。
热工自动化[1]
三、热工测量及仪表——温度计 热电偶温度计
热工自动化[1]
三、热工测量及仪表——温度计 辐射式温度计
辐射式温度计是依据物体辐射的 能量来测量温度的。
根据辐射理论,任何物 体只要 不处于绝对零度(-273.15 ℃),那 么在其他任意温度下都存在热辐射。
热工自动化[1]
三、热工测量及仪表——压力计 压力计
热工自动化[1]
五、CCS——单元机组协调控制系统 CCS
单元机组协调控制系统(coordination control system, CCS )是基于机、炉的动态特性,应用多变量控制理论形 成若干不同形式的控制策略,在机、炉控制系统基础上组 织的高一级机、炉主控系统。它是单元机组自动控制的核 心内容。
通过键盘和鼠标可以选择所希望了解的参数、图表等。操作人员 也可直接对控制回路的工作状态进行切换,如进行手动和自动切换。 操作员站可以单独使用,也可以多台组合起来形成一个操作中心, 每台操作员站完成不同的任务。
操作员站的主要功能有:采集过程控制信息,建立数据库;对生 产过程进行各种显示,如总貌、分系统、趋势、系统状态、模拟流 程、历史数据、报警等;对各种信息制表或曲线打印及屏幕拷贝; 控制方式切换;在线变量计算以及指导操作等
热工自动化[1]
二、分布式控制系统——DCS
操操作作员员站站操作员站(Operator Station,OS)是值班人员的中心操
作台,功能类似于一台常用的微机。它能把分散的回路信息和有关 生产过程的参数通过数据通道集中处理后,用一定的方式(图、表、 曲线)在屏幕上显示出来,实现对生产过程的集中监视和控制。
热工自动化[1]
二、分布式控制系统——DCS 工程师站
工程师站(Engineer Station,ES)是整个DCS进行组态的设备,用 来设计控制算法和开发人机监控界面。
在工程师站上,可以对控制系统进行离线配置和组态,对分布式 控制系统本身的运行状态进行监视和维护,对控制系统各参数进行 在线设定和修改。
监督生产过程的进行情况和检查对生产过程进行操作后 的效果,把反映生产过程运行情况的各个物理参数和各种 生产设备的工作状态传递到集中控制室内,以适当的方式 显示、处理、记录,使运行人员能及时掌握设备状态和生 产过程。配合数字显汞、图像显示、越限报警、综合性能 指标计算,或对运行趋势进行分析判断,给出运行指导意 见。
热工自动化
2020/11/21
热工自动化[1]
一、热工自动化技术
热工自动化技术
热工自动化技术是一种运用控制理论、热能工程技术、智能 仪器仪表、计算机技术和其他信息技术,从而对生产过程实现 检测、控制、优化、调度、管理、决策,达到确保安全、增加 产量、提高质量、降低消耗、减员增效等目的的综合性高新技 术。
CCS将锅炉汽轮发电机组作为一个整体进行控制,通过 控制回路协调锅炉和汽轮发电机组在自动状态下工作,给 锅炉和汽轮机的自动控制系统发出命令,控制机组适应负 荷变化,它直接作用于机炉的自动控制系统。
热工自动化[1]
五、CCS——单元机组协调控制系统
热工自动化[1]
六、SCS——顺序控制系统 SCS
过过程程监控控制层层又称车间监控层或单元层。过程监控层一般由服务
器、工程师站、操作员站和各种通信接口组成,用来实现对现场控 制层的各种信息进行处理和显示,对整个控制系统的控制算法和监 控界面进行组态。从通信需求来看,该层的通信网络要能够高速传 输大量信息数据和少量控制数据,因此也具有较强的实时性要求。
DCS的控制功能又是分散的,每个基础控制单元只控制若干个回 路,以避免局部的故障影响其它部分,即实现了危险分散,提高了 过程控制的可靠性。
热工自动化[1]
二、分布式控制系统——DCS 对DCS的形象比喻
热工自动化[1]
二、分布式控制系统——DCS DCS的体系结构图
热工自动化[1]
二、分布式控制系统——DCS
在火力发电厂中,热工测量是运行人员的耳目,通过热 工测量可以及时反映热工设备的运行工况,为运行人员提 供操作依据,为热工自动控制准确地、及时地提供信号, 保证热力设备安全、经济运行,实现自动控制,节省人力、 物力。
热工自动化[1]
三、热工测量及仪表——温度计
温温度度:温度是衡量物体冷热程度的物理量。它反映物体内
通过一台计算机来集中协调、管理检测和控制系统,并把相应的 任务分配给多台承担具体控制职能和检测职能的微型计算机,分散 完成控制和检测任务。这种系统称为分布式控制系统(DCS)
分布式控制系统是对生产过程进行监视、控制、管理的一种新型 控制系统,它是计算机技术、信息处理技术、测量控制技术、网络 技术有机结合的产物。分布式控制系统既具有监视功能,又具有控 制功能,各功能之间通过网络进行数据通信,实现信息共享。其监 视、管理功能集中实现,即信息集中,便于运行人员及时准确掌握 全局和局部情况,进行综合监督、管理和调度。也可减少大量的控 制室仪表,这种集中管理和调度的功能通过带有键盘和CRT显示器 的通用操作站进行。
热工自动化[1]
三、热工测量及仪表——温度计 1、水银和酒精温度计
热工自动化[1]
三、热工测量及仪表——温度计 2、双金属温度计
它的感温元件通常绕成螺旋形,一端固定,另一端连接 指针轴。温度变化时,感温元件的弯曲率发生变化,并通 过指针轴带动指针偏转,在刻度盘上显示出温度的变化。
热工自动化[1]
三、热工测量及仪表——温度计 压力式温度计
它的测温是基于密闭测温系统内蒸发液体的饱和蒸气压力和 温度之间的变化关系,而进行温度测量的。当温包感受到温度变 化时,密闭系统内饱和蒸气产生相应的压力,引起弹性元件曲率 的变化,使其自由端产生位移,再由齿轮放大机构把位移变为指 示值,这种温度计具有温包体积小,反应速度快、灵敏度高、读 数直观等特点
热工自动化[1]
三、热工测量及仪表——温度计 热电偶温度计
两种不同成份的导体(称为热电偶丝材或热电极)两端 接合成回路,当接合点的温度不同时,在回路中就会产生电 动势,这种现象称为热点效应,而这种电动势称为热电势。
热电偶就是利用这种原理进行温度测量的,其中,直接 用作测量介质温度的一端叫做工作端(也称为测量端),另 一端叫做冷端(也称为补偿端);冷端与显示仪表或配套仪 表连接,显示仪表会指出热电偶所产生的热电势。
热工自动化[1]
七、FSSS——锅炉炉膛安全监控系统 FSSS
锅炉炉膛安全监控系统(furnace safeguard supervisory system,FSSS),或称燃烧器管理系统。
FSSS包括炉膛火焰监视、炉膛压力监视、炉膛吹扫、自 动点火、燃烧器自动切换、紧急情况下的主燃料跳闸等。
FSSS是对锅炉点火和燃烧器进行顺序自动控制,防止炉 膛由于燃烧熄灭、过压等原因引起炉膛爆炸而采取监视和 控制措施的自动控制系统。它包括燃烧控制系统和炉膛安 全系统。
化的性质
利用导体或半导体受热后电 阻值变化的性质
-200~650
利用物体的热电性质 0~1600
非接触式仪表 辐射式温度计
利 的用 性物 质体辐射能随温度热工变自化动化[1]60~200
三、热工测量及仪表——温度计 膨膨胀胀式式温温度计计的测温是基于物体受热时产生膨胀的原理,
可分为液体膨胀式和固体膨胀式两种。这里主要介绍一种双金 属温度计。
现场控该制层层处于整个DCS系统的最底层,对现场工艺过程进行
具体的操作控制,检测过程参数并与过程监控层进行信息交换。现 场控制层主要由现场控制站、输入/输出接口等设备组成。现场控 制站负责进行各种控制功能的实现,输入/输出接口主要用来连接 各种现场设备,如传感器、执行器、变颇和驱动装置等。在该层面 上,可靠性、实时性和数据交换的准确性是对现场的工艺过程进行 有效控制的基本要求。