OI整机调试参数
FANUC0I常用参数

FANUC0I常用参数
1.通用参数:
-PWE(表面粗糙度补偿):设置工具的切削半径和切削长度的自动补偿。
可以根据工件的表面要求进行调整。
-MTS(度量制/英制转换):设置数控系统的度量制或英制模式。
-PWE(手动工具切换):允许操作员手动更换工具,以便进行不同类型的加工操作。
-MP(机床保护控制):设置机床的各种保护功能,如过载保护、过温保护等。
-APS(绝对/相对坐标切换):设置坐标系的工作方式,可以选择绝对坐标或相对坐标。
2.坐标系参数:
-G54-G59(工件坐标系):设置机床中工件坐标系的位置和切换。
每个坐标系都有自己的工件原点和参考点。
-G92(坐标系偏移):允许在加工过程中对当前坐标系进行微调,以便更好地与工件的实际位置相匹配。
3.配置参数:
-G50(坐标系偏移):设置初始位置和加工范围之间的偏移量,以便更好地控制机床的加工范围。
-G10(工件坐标系设置):设置工件坐标系的位置和旋转角度,以便更好地与实际工件匹配。
-G30(第二工件原点):如果需要对工件进行多次加工,可以设置第二个工件原点,以便在不同位置进行加工。
以上仅是FANUC0i中的一些常用参数,这些参数可以根据具体的加工要求进行调整和设置。
在使用数控系统时,操作员应根据实际情况和机床要求进行正确的参数配置,以确保加工过程的顺利进行。
FANUC_0i系统参数的设定方法资料
数控系统的参数完成数控系统与机床结构和机 床各种功能的匹配,使数控机床的性能达到最 佳。
(二)FANUC0i系统数控系统参数的 分类
FANUC0i数控系统的参数按照数据的形式大致 可分为位型和字型
(三)FANUC0i系统通用参数
1.有关SETTING参数号0000~0023。 2.与各轴的控制和设定单位相关的参数号1001~ 1023。这一类参数主要用于设定各轴的移动单位、各 轴的控制方式、伺服轴的设定、各轴的运动方式等等。 3.与机床坐标系的设定、参考点、原点等相关的参 数号1201~1280。这一类参数主要用于设定机床的 坐标系的设定,原点的偏移、工件坐标系的扩展等等。 4.与存储行程检查相关的参数号:1300~1327。这 一类参数的设定主要是用于各轴保护区域的设定等等。
(2)伺服电动机ID号(MOTOR ID NO)
(3)AMR:设定电枢倍增比 α 系列和α i系列伺服电动机设定为“00000000” 与电机内装编码器类型无关。 (4)CMR:设定伺服系统的指令倍率 设定值=(指令单位/检测单位)×2 如数控车床的X轴通常采用直径编程:为1
数控铣床和加工中心:为2
N/M = 12000/(12000÷0.5) = 1/2
(6)电动机的移动方向(DIRECTION SE) 111为正方向(从脉冲编码器端看为顺时针方向旋转)。 -111为负方向(从脉冲编码器端看为逆时针方向旋转)。 (7)速度脉冲数(VELOCITY PULSE NO) 串行编码器设定为8192 (8)位置脉冲数(POSITION PULSE NO) 半闭环控制系统中,设定为12500。 全闭环系统中,按电动机一转来自分离型检测装置的位置 脉冲数设定。 (9)参考计数器的设定(REF COUNTER) 按电机—转所需的位置脉冲数(半闭环)或按该数能 被整数整除的数来设定(全闭环)
FANUC_0i_Mate_MC数控加工中心电气设计和调试(DOC)
前言数控机床集计算机技术、电子技术、自动控制、传感测量、机械制造、网络通信技术于一体,是典型的机电一体化产品,它的发展和运用,开创了制造业的新时代,改变了制造业的生产方式、产业结构、管理方式,使世界制造业的格局发生了巨大变化。
现代的CAD/CAM、FMS、CIMS等,都是建立在数控技术之上。
数控技术水平的高低已成为衡量一个国家制造业水平的核心标志,实现加工机床及生产过程的数控化,已经成为当今制造业的发展方向。
我国是世界上机床产量最多的国家,但数控机床的产品竞争力在国际市场中仍处于较低水平,即使在国内市场也面临着严峻的形势:一方面国内市场对各类机床产品特别是数控机床有大量的需求,而另一方面却有不少国产机床滞销积压,国内机床产品充斥市场,严重影响我国数控机床自主发展的势头。
这种现象的出现,除了有经营上、产品质量上和促销手段上等的原因外,一个最主要的原因就是新产品(包括基型、变型和专用机床)的开发周期长,不能及时针对用户的需求提供满意的产品。
本论文采用的是FANUC数控加工中心系统,深入浅出地介绍了FANUC数控加工中心的电气原理图、PMC程序的编制和简单系统的调试等。
电气原理图与PLC程序设计是这次设计中的重点内容,同时也是难点。
由于本人水平有限,设计中的错误和不足之处在所难免,敬请各位指导老师和验收老师批评指正。
目录前言 (1)第一章绪论 (3)1.1 选题背景 (3)1.2 FANUC数控系统概述 (4)1.2.1 FANUC数控系统的主要类型 (4)1.2.2 FANUC数控系统的特点 (4)1.2.3 FANUC 0系列的主要功能及特点 (5)1.2.4 FANUC 0i系列的主要功能及特点 (5)1.3 FANUC数控加工中心的创新与应用 (6)第二章 FANUC加工中心电气原理图的设计 (6)2.1 常用电器的选型 (6)2.1.1 伺服电机的选型 (6)2.1.2 低压元器件选择 (7)2.2 电气原路图的基础知识 (8)2.2.1 电气原理图 (8)2.2.2 电气原路图的构成要素 (8)2.2.3 电气原路图的画法规则 (8)2.3 电气原理图的设计原则和设计步骤 (9)2.3.1 电气原理图中的图形符号、文字符号和接线端子标记 (9)2.3.2 电气原理图 (9)2.4 电气原理图电路示例 (12)第三章 FANUC PMC程序的设计 (14)3.1 概述 (14)3.2 PMC的地址 (15)3.3 PMC程序的结构 (16)3.4 基本指令 (16)3.5 功能指令 (18)3.5.1功能指令的格式 (19)3.5.2部分功能指令说明 (20)3.6 FANUC数控加工中心PMC的分析 (24)3.6.1 I/O分配表 (24)3.6.2 PLC完成M功能信号的处理 (25)第四章系统的调试 (27)4.1 FANUC Oi Mate-MC数控系统操作面板 (27)4.2 参数的显示 (28)4.3 用MDI设定参数 (29)4.4 重要参数的设定 (30)4.4.1 有关“SETTING”的参数 (30)4.4.2 有关轴控制/设定单位的参数..........................324.4.3 有关存储式行程检测的参数...........................354.4.4 有关进给速度的参数.................................354.4.5 有关加减速控制的参数 (35)4.4.6 有关伺服的参数 (35)4.4.7 有关DI/DO的参数 (36)4.4.8 有关MDI、显示和编辑的参数 (37)4.4.9 有关程序的参数 (39)4.4.10 有关螺距误差补偿的参数 (39)4.4.11 有关主轴控制的参数 (40)结论 (41)致谢 (41)参考文献 (42)第一章绪论1.1 选题背景加工中心(Machining Center,简称MC)是一种备有刀库并能自动更换刀具对工件进行多工序加工的数控机床。
Fanuc OI TD OI MD 参数更改说明
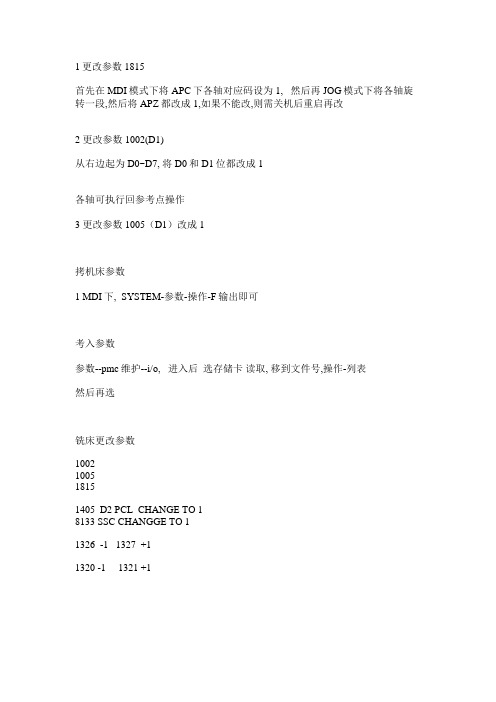
1更改参数1815
首先在MDI模式下将APC下各轴对应码设为1, 然后再JOG模式下将各轴旋转一段,然后将APZ都改成1,如果不能改,则需关机后重启再改
2 更改参数1002(D1)
从右边起为D0~D7, 将D0和D1位都改成1
各轴可执行回参考点操作
3 更改参数1005(D1)改成1
拷机床参数
1 MDI下, SYSTEM-参数-操作-F输出即可
考入参数
参数--pmc维护--i/o, 进入后选存储卡读取, 移到文件号,操作-列表
然后再选
铣床更改参数
1002
1005
1815
1405 D2 PCL CHANGE TO 1
8133 SSC CHANGGE TO 1
1326 -1 1327 +1
1320 -1 1321 +1
控制器需要备份的数据包括:参数、梯形图、SRAM(包括参数,但电脑打不开)
一备份
1 参数的备份
编辑—系统-参数-选择-文件输出
灌回:编辑--系统—参数—选择—文件输出。
FANUC 0I系统的连接与调试

C)伺服电机动力线和反馈线都带有屏蔽,一定要将屏蔽做接地处理,并且信号线和动力线要分开接地,以免由于干扰产生报警。如下所示:
D)对于PSM的MCC(CX3)一定不要接错,CX3的1,3之间只是一个内部触点,如果错接成200V,将会烧坏PSM控制板。如下图所示正确接法。
・按[SETING]软键。(若显示警告信息,请重新设定)。
・在轴设定画面上,指定关于轴的信息,如分离型检测器接口单元的连接器号。
・按[SETING]键(若显示警告信息,重复上述步骤)。此时,应关闭电源,然后开机,如果没有出现5138报警,则设定完成。
・首先把3111#0 SVS设定为1显现伺服设定和伺服调整画面。翻到伺服参数设定画面,如下图示,设定各项(如果是全闭环,先按半闭环设定)。
FANUC系统的连接与调试
第一节硬件连接
简要介绍了0IC/0I Mate C的系统与各外部设备(输入电源、放大器,I/O等)之间的总体连接,放大器(αi系列电源模块,主轴模块,伺服模块,βis系列放大器,βiSVPM)之间的连接以及和电源,电机等的连接,和RS232C设备的连接。最后介绍了存储卡的使用方法(数据备份,DNC加工等)。
G)对于I/O Link[JD1A]是连接到I/O模块或机床操作面板的,必须连接。
H)存储卡插槽(在系统的正面),用于连接存储卡,可对参数、程序、梯形图等数据ቤተ መጻሕፍቲ ባይዱ行输入/输出操作,也可以进行DNC加工。
1)伺服/主轴放大器的连接
以上是以0iC带主轴放大器为例的连接图。
注意:A)PSM、SPM、SVM(伺服模块)之间的短接片(TB1)是连接主回路的直流300V电压用的连接线,一定要拧紧,如果没有拧的足够紧,轻则产生报警,重则烧坏电源模块(PSM)和主轴模块(SPM)。
Oi-D联机调试说明

BEIJING-FANUC Oi-D/Oi-Mate D 简明联机调试说明仅供南京四开内部人员交流2011年10月目录第一章硬件连接第二章通电检查第三章语言切换第四章梯形图和参数导入第五章基本参数设定第六章手动进给调试第七章主轴调试第八章自动运行及辅助功能调整第九章精度检验及补偿第一章硬件连接(检查机床硬件连接是否正确)1.1 对于βi系列的伺服放大器,带主轴的放大器SPVM是一体型放大器,连接如下图所示。
注意:1、24V电源连接CXA2C(A1-24V,A2-0V);2、TB3(SVPM的右下面)不要接线;3、上部的两个冷却风扇要自己接外部的200V电源;4、三个伺服电机的动力线放大器端的插头盒是有区别的,CZ2L(第一轴),CZ2M(第二轴),CZ2N(第三轴)分别对应为XX,XY,YY;5、TB2和TB1不要接错,TB2(左侧)为主轴电机动力线,而TB1(右端)为三相200V输入端。
1.2 操作面板连接1.2.1 系统操作头+MDI面板连接系统头和MDI面板都是一体的,如下图注意:1、FSSB光缆一般接左边的插口;2、风扇、电池、软键、MDI等在系统出厂时已经接好,不要改动。
但可以检查是否松动;3、电源线插座(CP1),需外部供24V电源,注意正负极性;4、RS232接口和电脑接口的连接,有两个,若不用,可不接(使用存储卡可以代替232口,且传输速度和安全性都要比232口优越);5、串行主轴连接,JA41连到SVPM中的JA7B;6、对于I/O(JD51A)是连接到I/O模块中的JA51B;7、存储卡插槽(系统的正面),用于连接存储卡,可以对参数、程序、梯形图等数据进行输入/输出操作,也可以进行DNC加工,但是要CF卡和PCMIC(PC CARD ADAPTER)才能连接,CF卡容量不超过2G。
1.2.2 机床操作面板连接注意:1、面板背面PLUG1与I/O单元中CB107连接;2、面板背面A,B,5V,0V要与I/O中JA3连接;3、系统电源启动和关闭接POWER ON和POWER OFF。
FANUC_0i系统参数的设定方法

FANUC_0i系统参数的设定方法FANUC_0i系统参数是机床控制系统中的一种重要参数,它们决定了机床的运行模式、功能和性能。
正确设置FANUC_0i系统参数对于机床的正常运行和高效生产非常重要。
下面将介绍FANUC_0i系统参数的设定方法。
其次,设定FANUC_0i系统参数需要进入系统参数设定模式。
可以通过以下步骤进入系统参数设定模式:1.打开机床电源,进入FANUC_0i系统界面。
2.在FANUC_0i系统界面上按下“SYSTEM”按钮,进入系统菜单。
3.在系统菜单中选择“PARAMETER”选项,进入参数菜单。
4.在参数菜单中选择“SYSTEM”选项,进入系统参数菜单。
5.在系统参数菜单中选择“EDIT”选项,进入系统参数设定模式。
进入系统参数设定模式后,可以根据实际需要对FANUC_0i系统参数进行设定。
下面是一些常见的FANUC_0i系统参数的设定方法:1.机床坐标系参数:机床坐标系参数用于定义机床的坐标系原点和坐标轴方向。
可以根据实际情况设定机床坐标系参数,通常需要根据机床的结构和操作习惯进行调整。
2.运动参数运动参数:运动参数用于定义机床的运动速度和加减速度。
可以根据加工工件的要求和机床的性能设定运动参数,以确保机床的运动平稳和加工质量。
3.工具补偿参数:工具补偿参数用于定义刀具的几何和补偿信息。
可以根据使用的刀具和加工工件的要求设定工具补偿参数,以确保刀具的补偿精度和加工质量。
4.编程参数:编程参数用于定义机床的编程方式和规范。
可以根据编程人员的习惯和加工工件的要求设定编程参数,以确保编程的准确性和可读性。
在设定FANUC_0i系统参数时,需要注意以下几点:1.确保设定参数的合理性,避免设定错误导致机床故障或加工质量下降。
2.保存设定参数的备份,以备后续需要恢复时使用。
3.定期检查和更新设定参数,以适应机床的运行状态和加工工艺的变化。
总之,正确设定FANUC_0i系统参数对于机床的正常运行和高效生产至关重要。
fanuc调试参数

FANUC OI-D系统标准参数设置列表:轴设定参数设置列表参数号参数名称参数中文注解设定值1006#3 X DIA 各轴的移动指令为:0: 半径指定。
1: 直径指定。
11020 XZ AXIS NAME 各轴的名称88901022 XZ AXIS ATTRIBUTE 设定各轴在基本坐标系中排列131023 XZ SERVO AXIS NUM 各轴的伺服轴号 121320 XZ LIMIT + 各轴的存储行程限位的正方向坐标值调试期间不使用软限位时,此参数设置为-1.调试完毕后,此参数设置应距离硬件限位5mm。
1321 XZ LIMIT - 各轴的存储行程限位的负方向坐标值调试期间不使用软限位时,此参数设置为1.调试完毕后,此参数设置应距离硬件限位5mm。
1410 DRY RUN RATE 空运行速度此参数设置为机、电、液协议中轴快速移动速度的一半1420 XZ RAPID FEEDRATE 各轴的快速移动速度此参数设置为机、电、液协议中轴快速移动速度。
1421 XZ RAPID OVR F0 每个轴的快速移动倍率的F0 速度200mm200mm1423 XZ JOG FEEDRA TE 每个轴的JOG 进给速度1000mm1000mm1424 XZ MANUAL RAPID 每个轴的手动快速移动速度此参数设置为机、电、液协议中轴快速移动速度的一半1425 XZ REF RETURN FL 每个轴的手动返回参考点的FL 速度300mm300mm1428 XZ REF FEEDRA TE 每个轴的参考点返回速度3000mm3000mm步骤4:设置参数完毕后,返回至上一级画面,进入[伺服设定]画面,并根据下表设置相应参数 参数名称 中文注解设定值电机代码由于0ID 系统要求使用HRV2功能,所以调试时应根据电机铭牌查询电机代码,并加100为设定值。
如aIF40/3000,电机代码为207,使用HRV2功能时,此参数设置为307.(电机代码表见下面附图)指令倍乘比2柔性齿轮比 N M柔性齿轮比计算方法为:10的6次幂/轴的丝杠螺距X 1000的比值X 机械传动比。
FANUC-Oi系统模拟主轴调试策略

r WD I ' t EV o
2 . F R Q指 示 灯: F _ 0 1 1 为1 , 2 / 3 时 , 指 示 灯 常 亮 。
3
.
警 :
_
:
O
o
A M D
F WD指示灯: 转向设定为正转时, 指示灯会动作
( 停机 中闪烁 , 运转后则处于常亮状态 )
恒线 速度切削时 ,实现主轴速度 与切 削点半径 ( 及x
4 . 1 主轴 位 置编 码器 的作 用
( 1 )主轴位置 编码器在数控车床 中的作用 螺纹车 削工艺要 求主 轴与进 给轴 ( z ) 的 同步 , 及 主轴 每转一转 z轴要求进 给一 个螺距距离 , 为保证 螺距 线性和 进 给轴连续进 给 , 利用主轴位置编码器 , 若 主轴 1 0 2 4 P / 转, 经过 4倍频后 为 4 0 9 6 转, 这样 C N C每接受编码 器 1 个 脉冲 , 控制 z轴进给滚珠丝杠 螺距的 4 0 9 6分之一距离 , 实 现了同步控制 , 保证 了线性和连续进给。
表 1 台安 N2系列 变频器 C NC控制参数调整表
6 8 I 囊燕辍糕 蕺 ・ 2 0 1 3  ̄ g 第4 期
’
R e s e a r c h&D e s i g n 研究与设计 ■冀
变 频 嘲 WWW. c h i n a b i a n p i n . c o n r
l { ¨
P
数= l , 转差率 0 , 可计算 电动机三相 电源 的最低频率和最 高频率分别为 : 1 . 6 7 H z, 6 6 . 7 H z 。
K A 1 、 K A 2 、 变频器 、 电动机及机械传动等部分是否有故障 。
FANUC Oi系统的基本调试步骤

FANUC Oi系统的基本调试步骤一、电器连接的检查1、控制单元至伺服放大器的给定信号(JS1A-JS1B);2、主轴给定信号JA8A-模拟主轴给定信号;JA7A-伺服主轴给定信号;3、键盘的连接FANUC标准键盘时:IOLINK JD1A-JD1B(键盘上)自制键盘时:内政IO(CB104-107)或接IOLINK单元4、显示单元的连接CRT JA1-显示器的CN1JA2-MDI键盘CK15、RS232C的连接JD5A或分别对应不同参数JD5B6、手摇脉冲发生器的连接MPG JA3 可同时连接3个7、来自伺服电机的反馈信号JF18、放大器的输入电源:3相220V9、输出给电机的电源:U V W (相序不能接错)10、直流24V工作电压二、接通电源1、先断开(拔下)DC24V供电部分:NC CRT IOLINK键盘2、分级上电3、确认DC24V无误后再给相应部分上电4、确认3项220V无误后再给放大器上电三、通电后检查1、显示器是否正常显示2、控制单元与放大器上的状态指示灯是否闪烁3、利用PMC的状态诊断PMCDGN检查内置IO上的输入信号四、基本设定按功能键OFFSET SETTING ――SETTINGPWE 参数写入(PARAMETER WRITE)=对CNC参数、PMC参数等进行设定时的软开关TV检查(TV CHECK) =对一个程序段内的TV(TAPE Vertical纸带纵向)检查功能进行选择参数0#0输出码(PUNCH CODE)=对阅读机/穿孔机接口的输出码进行选择参数0#1 ISO输入单位(INPUT UNIT)=对输入数据的单位(公制/英制)进行选择参数0#2 MMI/O通道(I/O CHANNEL) =对阅读机/穿孔机接口上使用的通道进行选择参数20 1顺序号(SEQUENCE NO.) =用MDI键盘制作程序时,对自动插入顺序号的功能进行选择参数0#5纸带格式(TAPE FORMAT)=对FS15程序指令形式进行选择(选择)参数1#1停止对照=设定顺序号比较停止功能上相应顺序号所属的程序号(选择)参数8341停止对照=设定顺序号比较停止功能的停止时的顺序号(选择)参数8342 镜像X =对X轴的移动进行正方向/负方向的转换镜像Y =对Y轴的移动进行正方向/负方向的转换(仅限M系)镜像Z =对Z轴的移动进行正方向/负方向的转换只在自动运转时有效,而在手动操作中无效日期2005/07/25时间17:09:32五、PMC程序的输入PMC参数设定画面HIDE PMC PROGRAM√PROGRAMMER ENABLELADDER MANUAL START√RAM WRITE ENABLESIGNAL TRACE STARTHEDE DATA TBL CNTL SCREENSIGNAL TRIGGER START√EDIT ENABLE√WRITE TO F-ROM(EDIT)ALLOW PMC STOPHEDE PMC PARAMPROTECT PMC PARAM√TRACE START1、用LADDER Ⅲ新建PMC程序时:选择文件名:NamePMC规格:PMC Type :选PMC-SA1/RA1(Oi-A)PMC-SB7 (Oi-B)2、设置IO Module(使用IOLINK时)输入Title Message 等3、编制完PMC程序后保存,输入到NC前要编译(Tool Compile)4、将PMC程序传入NCNC侧准备●按●电脑侧LADDERⅢ上操作提示COM 口 com1波特率 9600效验位 NONE停止位 2回到NC 侧按下急停按钮六、参数设定(一)、伺服参数设定1、检查伺服调整画面是否显示2、伺服参数的初始化设定方法将2000号参数设为全零,重新上电即进行初始化,初始化结束后#3位自动变成1。
FANUC发那科OI-MD第四轴调整及参数设置

功能追加将追加文件名改为“CNCOPSET ” OP 读 诊断1148#1#7 为1则为追加成功四轴驱动接线图四轴检测信号X2.0第四轴夹紧X2.1 第四轴放松 Y1.6 第四轴松开X9.3四轴原点M 代码A1:+24vA2:0v1、3脚短接模块电源线四轴动力线FSSB 光缆接口 四轴编码器第四轴夹紧M10 第四轴松开M11关于FANUC系统加第四轴调试首先把第四轴的驱动器固定,连接上电源、光纤、编码器、马达线等。
做好一些开机准备。
检查三轴参数资料正确。
自动设定:1.按SYSTEM键调整参数#8130(总控制轴数)调为4,关电重启。
2.将#1020 A=65。
#1023 设定为1;2;3;4等。
对应光缆接口X,Y,Z ,A等。
关电重启(注:要关掉总的电源)3.请确认#14476=0( DFS FSSB )为0I-MD专用方式,当次参数为1(为0I-MC兼容方式)。
根据控制器型号和驱动器选择,以下是0I-MD设置方式。
4.请确定参数FMD(No.#1902.0)=0:请按照如下步骤执行基于FSSB 设定画面的自动设定。
1 放大器设定画面上按照从控装置号的顺序显示伺服放大器和脉冲模块的信息。
2 设定连接于每个从控装置的轴控制号。
此时,在旁边显示控制轴名称。
(脉冲模块除外)3 选择轴设定画面,在每个控制轴中设定脉冲模块的连接器号等功能数据。
4 按下软键“设定”,进行自动设定。
设定数据有问题时,发生告警,请再次重新进行正确设定。
通过这一操作执行自动计算,设定参数(No.1023, No.1905, No.1936,No.1937,No.14340~14349, No.14376~14391)。
此外,表示各参数的设定已经完成的参数AES(No.#1902.1)成为”1”,进行电源的OFF/ON 操作时,按照各参数进行轴设定。
5.将K0.3=1,这个时候有显示第四轴的坐标,调整参数,关电重启(注:要关掉总的电源)。
整机调试文档

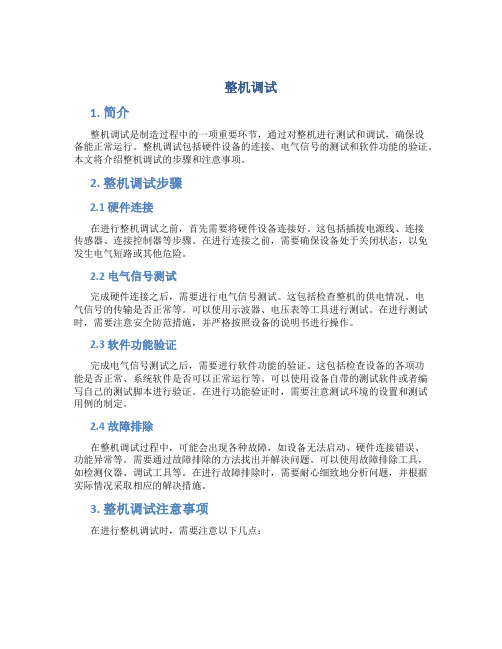
整机调试整机调试是指在产品制造完成后,对整个产品进行功能和性能的检测和调整的一项工作。
它是产品生产流程中的重要环节,能够确保产品的质量和性能达到要求,并保证产品能够正常运行。
调试流程整机调试的主要流程包括以下几个步骤:1.检查和准备:在进行整机调试之前,首先要仔细检查产品的各个组成部分是否装配正确,是否缺失或损坏。
同时,还需准备好调试所需的仪器设备和工具。
2.软件调试:对于智能化产品来说,软件调试是整机调试中的重要环节。
首先,需要将产品的软件程序下载到相应的控制器或处理器中。
然后,通过对软件程序进行调试和测试,确保产品的各项功能正常运行。
3.功能调试:整机调试的关键是对产品的各项功能进行调试。
需要按照产品的功能要求,逐一测试各个功能模块是否正常运行。
例如,对于一台电视机,需要测试图像显示、音频输出、遥控器功能等。
4.性能调试:在功能调试完成后,还需要对产品的性能进行调试和测试。
例如,对于一台空调,需要测试它的制冷、制热、除湿等性能参数是否达到设计要求。
5.调整和优化:在调试过程中,可能会发现一些问题或不足之处。
需要根据调试结果进行调整和优化,以提高产品的性能和可靠性。
例如,通过调整电路参数、更换元器件等方式来优化产品的性能。
6.记录和报告:整机调试过程中,需要对调试的每一个环节进行记录,包括调试时间、调试步骤和调试结果等。
最后,还需要撰写整机调试的报告,对整个调试过程进行总结和归纳。
调试工具和设备在进行整机调试时,需要使用一些专用的工具和设备,以便进行准确的测试和调整。
常用的调试工具包括:•模拟信号发生器:用于产生各种模拟信号,以测试产品的各个模块是否正常工作。
•数字信号发生器:用于产生各种数字信号,以测试产品在不同输入条件下的响应情况。
•示波器:用于显示和测量电压、电流等信号的波形和参数,以判断产品是否正常工作。
•多用途测试仪:集合了多种测试功能,如电压测量、电流测量、电阻测量等,可广泛应用于整机调试中的各个环节。
FANUC-0i 系统参数

无锡机电高等职业技术学校 FANUC数控系统应用中心
3190#6 设1
0i D系列03281 设15
*初学者可以先设置此参数,并将系统电源重启,界面会转 换为中文(不完全),方便操作
2021/6/21
10
课题六 FANUC 数控系统参数
无锡机电高等职业技术学校 FANUC数控系统应用中心
2021/6/21
3
课题六 FANUC 数控系统参数
二、设置FANUCห้องสมุดไป่ตู้控系统参数
1、系统参数的显示方法
无锡机电高等职业技术学校 FANUC数控系统应用中心
(1)按MDI面板上的功能键 选择参数页面
几次或一次后,再按软键[参数],
(2)从键盘输入想显示的参数号,然后按软键[搜索]。可以显示 指定的参数所在页面。光标在指定的参数位置上。
无锡机电高等职业技术学校 FANUC数控系统应用中心
课题六 FANUC数控系统参数
2021/6/21
1
课题六 FANUC 数控系统参数
无锡机电高等职业技术学校 FANUC数控系统应用中心
教学目标
1.掌握数控系统参数设定的方法。 2.了解FANUC基本参数的含义。 3.学会使用参数说明书。
2021/6/21
(d)如果参数设定完毕,需将参数设定页面的“参数写入=”设定为0, 禁止参数设定。
*解除100号报警方法:按下RESET+CAN 或只按下RESET(由参数设定)
*参数修改后:若出现000号报警,需关系统电源;对轴参数进行设置 后,需要关设备总电源
2021/6/21
8
课题六 FANUC 数控系统参数
0i-F标准连接调试手册

1.1 1.2 1.3 1.4 1.5 1.6 1.7 1.8 1.9 FS 0i-D αi 放大器+串行主轴 FS 0i Mate-D βi 一体放大器+串行主轴 FS 0i Mate-D βi 单体放大器(20A/40A/80A)+模拟主轴 FS 0i Mate-D βi 双轴放大器+模拟主轴 FS 0i Mate-D βi 单体放大器(80A/80A/80A)+串行主轴(Pakage5,钻削中心专用) FS 31iB-D 31iB 放大器+串行主轴 FS 0i-D 31iB 放大器+串行主轴 FS 0i-F βi-B 一体型放大器+串行主轴 FS 0i-F 31iB 放大器+串行主轴
-1-
第一部分 基础连接调试 第一章 硬件连接使用说明
目
1.
录
第一章 硬件连接使用说明................................................................................................................. - 2 0i-D、0 i -Mate-D、31iB、0i-F 常见机型整体硬件连接 ............................................................ - 3 1.1 1.2 1.3 1.4 1.5 1.6 1.7 1.8 1.9 2. 3. FS 0i-D αi 放大器+串行主轴........................................................................................... - 3 FS 0i Mate-D βi 一体放大器+串行主轴 .......................................................................... - 3 FS 0i Mate-D βi 单体放大器(20A/40A/80A)+模拟主轴 ............................................. - 3 FS 0i Mate-D βi 双轴放大器+模拟主轴 .......................................................................... - 3 FS 0i Mate-D βi 单体放大器(80A/80A/80A)+串行主轴(Pakage5,钻削中心专用) ... - 3 FS 31iB-D 31iB 放大器+串行主轴 .................................................................................. - 3 FS 0i-D 31iB 放大器+串行主轴 ...................................................................................... - 3 FS 0i-F βi-B 一体型放大器+串行主轴 ........................................................................... - 3 FS 0i-F 31iB 放大器+串行主轴 ....................................................................................... - 3 -
整机调试_精品文档
整机调试1. 简介整机调试是制造过程中的一项重要环节,通过对整机进行测试和调试,确保设备能正常运行。
整机调试包括硬件设备的连接、电气信号的测试和软件功能的验证。
本文将介绍整机调试的步骤和注意事项。
2. 整机调试步骤2.1 硬件连接在进行整机调试之前,首先需要将硬件设备连接好。
这包括插拔电源线、连接传感器、连接控制器等步骤。
在进行连接之前,需要确保设备处于关闭状态,以免发生电气短路或其他危险。
2.2 电气信号测试完成硬件连接之后,需要进行电气信号测试。
这包括检查整机的供电情况、电气信号的传输是否正常等。
可以使用示波器、电压表等工具进行测试。
在进行测试时,需要注意安全防范措施,并严格按照设备的说明书进行操作。
2.3 软件功能验证完成电气信号测试之后,需要进行软件功能的验证。
这包括检查设备的各项功能是否正常、系统软件是否可以正常运行等。
可以使用设备自带的测试软件或者编写自己的测试脚本进行验证。
在进行功能验证时,需要注意测试环境的设置和测试用例的制定。
2.4 故障排除在整机调试过程中,可能会出现各种故障,如设备无法启动、硬件连接错误、功能异常等。
需要通过故障排除的方法找出并解决问题。
可以使用故障排除工具,如检测仪器、调试工具等。
在进行故障排除时,需要耐心细致地分析问题,并根据实际情况采取相应的解决措施。
3. 整机调试注意事项在进行整机调试时,需要注意以下几点:3.1 安全防范在整机调试之前,需要确保设备处于关闭状态,并且采取相应的安全防范措施。
如穿戴防静电手套、使用绝缘垫等。
在进行高压电源测试时,更需要注意安全,严禁单人操作,确保有他人在场并具备急救知识。
3.2 严格按照规定操作在整机调试过程中,需要严格按照设备的操作手册和说明书进行操作。
禁止随意更改设备的配置和参数。
在进行测试时,需要按照测试用例执行,并记录测试结果。
3.3 关注测试环境在进行整机调试时,需要关注测试环境的设置,尽可能模拟实际使用场景。
FANUCSeriesOi系统传输设置

FANUC Series Oi-TA
南通紫琅职业技术学院
胡美云
一.先打开机床,后开电脑。
二.打到MDI状态(才可以修改参数设置里的参数写入)。
三.参数设置按OFF/SET键,在按SETTNG键,先改“参数写入”把0改成1这样方可改动其他的数据并保存。
1.参数写入“0”
校正“0”
3.PUONCH CODE “1”(ISO)
4.I/O频道“0”(“4”是可用来卡的传输)
5.顺序号“0”
6.磁带格式“0”
7.排序停止“0”
8.排序停止“0”
四.按SYSTEM键0000行参数是“0”“0”“0”“0”“1”“0”“1”“0”,
0103行参数是“9”对应"2400”波特率(设定传输速率, “10”对应4800,“11”对应“9600”
11可以用来卡的输入)
五.设置CAM,档案/下一页/DNC传输,电脑先点接收,以TXT格式保存。
1.传输格式“ASCII”,通讯端口“COM1”,传输速率“2400”,同为检查“偶同位”,“资料位元“7”,停止位元“2”交换协定“软体”(software).
六.从机床传到电脑,先按PROG键,打到“编辑”状态,按“操作”键,在切换到“PUNCH”(读出)输入要传输的文件名,比如“O0025”再点执行,等到屏幕闪烁的输入没有就表示传输完毕。
(传输完后一定要在CAM中点确定,否则会造成没有程序。
)
七.从电脑传到机床,先按PROG键,打到“编辑”状态,按“操作”键,在切换到“READ”(读入),在按“执行”,屏幕闪烁“标投”显示。
八.在CAM中点传送,选择要传输的程序。
OK。
发那科0iC数控系统参数
PRM1420 各轴快速运行速度〔G00速度〕 标准设定:5000/10000
轴设定〔进给速度〕
PRM1421 各轴快速运行倍率的F0速度 标准设定:500
PRM1422 所有轴的最大切削进给速度 标准设定:4000
PRM1423 各轴手动连续进给〔JOG进给〕速度 标准设定:1000
设定参数PRM3190#6=1,设定完成后 会出现000号请关闭电源报警,重新上 电启动,系统启动显示简体中文。
PRM3102#3 繁体汉语 PRM3190#6 简体中文
参数分类
• 通讯接口 • 轴控制/设定单位〔1000〕 • 坐标系〔1200〕 • 进给速度〔1400〕 • 伺服参数〔1800、2000〕 • DI/DO参数〔3000〕 • 显示及编辑〔3100〕 • 编程〔3400〕 • 螺距误差补偿〔3600〕 • 主轴控制〔3700、4000〕 • 有关加工运行〔5000、6000、7000〕 • 〔固定循环、刀具补偿、图形显示等〕 • 有关FSOI根本功能的参数〔8100〕 • 其他参数
相对坐标系中每一转的移动量 0:不循环/1:循环〔标准〕
PRM1010 CNC控制轴数
轴设定〔根本〕
PRM1020 各轴编程用轴名 88:X/89:Y/90:Z/85:U/86:V/87:W 65:A/66:B/67:C/69:E
PRM1022 根本坐标系中各轴的设定〔0-7〕 0:不是根本3轴,也不是其平行轴 1:X轴/2:Y轴/3:Z轴 5:X轴平行轴/6:Y轴平行轴/7:Z轴平行轴
标准设定:150
轴设定〔加/减速〕
PRM1622 切削进给插补后的指数加/减速时间 常数或铃型加/减速时间常数或直线型加/减速 时间常数 标准设定:50
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1、与设定相关的参数P0000#2(INI)0输入单位 0:公制; 1:英制#5(SEQ)1是否自动插入顺序号 0:不自动插入;1:自动插入P00204I/O设备输入接口号:CF存储卡接口P0138#5(SCH)1调度运行功能有效#7(MNC)1可以从存储卡进行DNC运行,或进行外部设备子程序调用2、与轴控制/设定单位相关的参数P1001#0(INM)0直线轴的最小移动单位为:公制单位P1002#0(JAX)1JOG进给、手动快速移动及返回参考点的同时控制轴数: 3轴#3(AZR)1参考点尚未建立时的G28指令: 显示出报警(PS0204) P1005#0(ZRN)0参考点返回未完成,执行自动运行时:0-报警并禁止运行;1-不报警且执行动作#1(DLZ)0将无挡块参考点设定功能设定为:0:无效;1:有效#3(HJZ)0#4(EDP)0切削进给时各轴的正方向的外部减速信号: 无效#5(EDM)0切削进给时各轴的负方向的外部减速信号: 无效P1006#0(ROT)0设定直线轴或旋转轴: 直线轴#1(ROS)0#3(DIA)0各轴的移动指令为: 半径指令#5(ZMI)0手动参考点返回方向为: 正方向P1008#4(SFDX)0基于栅格方式的参考点返回操作中,参考点位移功能:0:无效;1:有效P1020X88各轴的程序名称: X轴Y89各轴的程序名称: Y轴Z90各轴的程序名称: Z轴P1022X1设定各轴为基本坐标系中的: 基本3轴的X轴Y2设定各轴为基本坐标系中的: 基本3轴的Y轴Z3设定各轴为基本坐标系中的: 基本3轴的Z轴P1023X1X轴对应的伺服轴号Y2Y轴对应的伺服轴号Z3Z轴对应的伺服轴号3、与坐标系相关的参数P1201#0(ZPR)1在进行手动返回参考点操作时,“进行”自动坐标系设定#2(ZCL)1在进行手动返回参考点操作时,“取消”局部坐标系P1202#1(EWS)0将外部工件原点偏置量设定为: 有效#3(RLC)0是否通过复位来取消局部坐标系:不予取消P1241Z-P2轴实际调整第2参考点在机械坐标系中(Z)的坐标值:刀库换刀点位置坐标设定(斗笠刀库)P1242Z-P3轴实际调整第3参考点在机械坐标系中(Z)的坐标值:主轴抬高安全位置坐标设定(斗笠刀库)4、与存储行程检测相关的参数P1300#6(LZR)1在执行手动参考点返回操作之前,存储行程检测: 无效P1301#4(OF1)1在存储行程检测1中,发生报警后轴移动到可移动范围时:解除OT #6(OTS)1发生超程报警时: 向PMC输出超程报警中信号#7(PLC)1是否进行移动前行程检测: 进行P1311#0(DOT)0刚刚通电后的存储行程限位检测: 无效P1320X实际调整X轴的存储行程限位1的正方向坐标值Y实际调整Y轴的存储行程限位1的正方向坐标值Z实际调整Z轴的存储行程限位1的正方向坐标值P1321X实际调整X轴的存储行程限位1的负方向坐标值Y实际调整Y轴的存储行程限位1的负方向坐标值Z实际调整Z轴的存储行程限位1的负方向坐标值5、与进给速度相关的参数P1401#0(RPD)0通电后参考点返回完成之前,手动快速移动设定为: 无效#1(LRP)1定位G00为:直线插补型 (刀具沿着直线移动)#2(JZR)0是否通过JOG进给速度进行手动返回参考点操作: 不进行#4(RFO)1快速移动时,切削进给速度倍率为0%的情况下: 刀具停止移动#5(TDR)1在螺纹切削以及攻丝操作中,将空运行设定为: 无效#6(RDR)0在快速移动指令中空运行: 无效P1402#1(JOV)0将JOG倍率设定为: 有效#4(JRV)0JOG进给和增量进给: 选择每分钟进给P1403#4(ROC)0在螺纹切削循环G92.G76中,其中回退动作中快速移动倍率:有效#7(RTV)0螺纹切削循环回退操作中快速移动倍率:有效P1404#1(DLF)1参考点建立后的手动返回参考点操作: 在手动快速移动速度下定位#2(FM3)0每分钟进给时的不带小数点的F指令的设定单位为: 1mm/min#7(FC0)0自动运行中,进给速度F的指令为0的程序段(G1.G2.G3等)被指令时: 发生报警(PS0011)P1*******空运行速度P1420X10000X轴的快速移动速度Y10000Y轴的快速移动速度Z8000Z轴的快速移动速度P1421X30X轴的快速移动倍率的F0速度Y30Y轴的快速移动倍率的F0速度Z30Z轴的快速移动倍率的F0速度P1423X6000X轴的JOG进给速度Y6000Y轴的JOG进给速度Z6000Z轴的JOG进给速度P1424X8000X轴的手动快速移动速度Y8000Y轴的手动快速移动速度Z8000Z轴的手动快速移动速度P1425X500X轴的手动返回参考点的FL速度Y500Y轴的手动返回参考点的FL速度Z300Z轴的手动返回参考点的FL速度P1428X2000X轴的参考点返回速度Y2000Y轴的参考点返回速度Z1500Z轴的参考点返回速度P1430X8000X轴的最大切削进给速度Y8000Y轴的最大切削进给速度Z7000Z轴的最大切削进给速度P1432X9000插补前加/减速方式的X轴的最大切削进给速度Y9000插补前加/减速方式的Y轴的最大切削进给速度Z8000插补前加/减速方式的Z轴的最大切削进给速度P1434X7000X轴的手动手轮进给的最大进给速度Y7000Y轴的手动手轮进给的最大进给速度Z6000Z轴的手动手轮进给的最大进给速度6、与加/减速控制相关的参数P1603#4(PRT)0直线插补型定位的快速移动加减速采用:0:加速度恒定性;1:时间恒定型P1610#0(CTL)1切削进给或空运行的加减速采用:0:指数函数型加减速;1:直线加减速#4(JGL)0JOG进给的加减速采用:0:指数函数型加减速;1:与切削进给相同的加减速#5(THL)0螺纹切削循环中的加减速采用:0:指数函数型加减速;1:与切削进给相同的加减速P1620200每个轴的快速移动直线加减速的时间常数T1/T2P162180每个轴快速移动的铃型加减速时间常数T2P162280每个轴的切削进给加减速时间常数P16230每个轴的切削进给插补后加减速的FL速度P1624200每个轴的JOG进给加减速时间常数P162510每个轴的JOG进给加减速的FL速度7、与伺服相关的参数P1800#4(RBK)1是否进行切削/快速移动的反向间隙补偿: 0:不进行; 1:进行P1820CMR2每个轴的指令倍乘比(X/Y/Z)P208410mm螺距1每个轴的柔性齿轮比(X/Y/Z) (根据丝杆螺距实际调整)P2085100P182110000每个轴的参考计数器容量(X/Y/Z) (根据丝杆螺距实际调整)P1*******每个轴的伺服环增益(X/Y/Z)P182620每个轴的到位宽度(X/Y/Z)P182720每个轴的切削进给时的到位宽度(X/Y/Z)P182832000每个轴的移动中的位置偏差极限值(X/Y/Z)P1829500每个轴的停止时的位置偏差极限值(X/Y/Z)P1830500每个轴的伺服断开时的位置偏差极限值(X/Y/Z)P1844自动设定参考点偏移功能的参考点偏移量=0时,或者基于栅格的参考点返回时,到最初的栅格点的距离(此参数值系统执行手动参考点返回时自动设定,请勿修改)P18500每个轴的栅格位移量/参考点位移量(X/Y/Z)P18510每个轴的反向间隙补偿量(X/Y/Z)P18520每个轴的快速移动时的反向间隙补偿(X/Y/Z)P1902#0(FWD)0将FSSB得设定方式设定为: 0:自动设定;1:手动设定#1(ASE)1FSSB的设定方式为自动设定时,自动设定:0:尚未结束;1:已经结束P1905#0(FSLX)0伺服放大器和伺服软件之间的接口类型:0:FAST(快速);1:SLOW(慢速)#0(FSLY)1伺服放大器和伺服软件之间的接口类型:0:FAST(快速);1:SLOW(慢速)#0(FSLZ)0伺服放大器和伺服软件之间的接口类型:0:FAST(快速);1:SLOW(慢速)P1910ATR0相对于从控装置1的地址变换表值 (P1902#0="0"时自动设定,请勿修改)P1911ATR1相对于从控装置2的地址变换表值 (P1902#0="0"时自动设定,请勿修改)P1912ATR2相对于从控装置3的地址变换表值 (P1902#0="0"时自动设定,请勿修改)P1913~P191940P1902#0="0"时,自动设定,请勿修改P1815#4(APZx)0/1位置检测器使用绝对检测器时,机械零点设置:0-尚未建立;1-已经建立#5(APCx)0/1位置检测器为:0-绝对位置检测器以外的检测器;1-绝对脉冲编码器设置说明:使用绝对编码器时,首先将#5=1,#4=0,将机床X/Y/Z移动到制定机械零点位置后,再将#4=1,重新断电开机,机械零点位置设定完成。
(当更换绝对编码器或者编码器供电电池插拔、更换后,必须重新设定机械零点位置)8、与DI/DO相关的参数P3003#0(ITL)0使所有轴互锁信号:0:有效;1:无效#2(ITX)0使各轴互锁信号:0:有效;1:无效#3(DIT)0使不同轴向的互锁信号:0:有效;1:无效#5(DEC)0用户参考点返回操作的减速信号:0:在信号为0下减速;1:在信号为1下减速P3004#5(OTH)0是否进行超程信号的检查:0:进行;1:不进行P3006#0(GDC)0用于参考点操作的减速信号:0:使用X009;1:使用G196(X009无效)P30100选通脉冲信号MF/SF/TF/BF的延迟时间(=0,视为8ms;=30,视为32ms)P30110M/S/T/B功能结束信号(FIN)的可接受宽幅 (=0,视为8ms;=30,视为32ms)P30302M代码的允许位数 (设为0时,将允许位数视为8位)P30314S代码的允许位数 (设为0时,将允许位数视为9位)P30322T代码的允许位数 (设为0时,将允许位数视为10位)9、与显示/编辑相关的参数P3105#0(DPF)1是否显示实际速度:0:不予显示;1:予以显示#2(DPS)1是否显示实际主轴转速、T代码:0:不予显示;1:予以显示P3106#4(OPH)0是否显示操作履历画面:0:不予显示;1:予以显示#5(SOV)1是否显示主轴倍率值:0:不予显示;1:予以显示P3107#3(GSC)0要显示的进给速度:0:为每分钟进给速度#4(SOR)0程序一览显示:0:按程序的登录顺序显示;1:按程序的名称顺序显示P3108#4(WCI)1在工件坐标系画面上,计数器输入:0:无效;1:有效#6(SLM)1是否显示主轴负载表:0:不予显示;1:予以显示#7(JSP)1是否在当前位置画面和程序检查画面上显示JOG进给速度或空运行速度:1:显示P3111#0(SVS)1是否显示用来显示伺服设定画面的软键: 0:不予显示;1:予以显示#1(SPS)1是否显示用来显示主轴设定画面饿软键: 0:不予显示;1:予以显示#5(OPM)0是否进行操作监视显示:0:不予显示;1:予以显示#6(OPS)1操作监视画面的速度表上:0:显示出主轴电机速度;1:显示出主轴速度#7(NPA)1是否在报警发生时以及操作信息输入时切换到报警/信息画面:1:不予切换P31230屏幕保护启动时间(单位:MIN)P3130X1当前位置显示画面上显示的顺序Y2当前位置显示画面上显示的顺序Z3当前位置显示画面上显示的顺序P3134X1工件坐标系画面和工件坐标系偏移量设定画面的各轴数据显示顺序Y2工件坐标系画面和工件坐标系偏移量设定画面的各轴数据显示顺序Z3工件坐标系画面和工件坐标系偏移量设定画面的各轴数据显示顺序P31351实际进给速度显示的小数点一下位数P3191#2(WSI)0是否在工件原点偏置画面上显示软键[输入] :0:予以显示;1:不予显示#3(SSF)1是否在设定画面输入数据时显示确认的软键:0:不予显示;1:予以显示#7(FSS)0每分钟进给速度或每转进给速度的显示:0:通过运行状态进行切换;1:与运行状态无关,假设为每转进给速度P3195#2(CPR)0是否进行基于功能键[SYSTEM]的参数设定支援画面的显示:0:进行;1:否#7(EKE)1是否显示擦除全部履历数据的软键[全清] :0:不予显示; 1:予以显示P3201#5(N99)0参数3201#6=0时,登录程序时在M99程序段中:0:视为登录结束;1:否#6(NPE)0登录程序时,在M02/M30/M99的程序段:0:视为登录结束;1:否P3202#4(NE9)1是否进行程序号9000-9999的程序编辑:0:不禁止;1:禁止#6(PSR)1/0使受保护的程序的程序号检索:0:无效;1:有效P3203#5(MZE)1是否在开始MDI运行后禁止在运行中途的程序编辑:0:不禁止;1:禁止#6(MER)0在MDI运行中,在进行单程序段运行时,在结束程序中的最后程序段的执行时,是否擦除已经执行的程序:0:不予擦除;1:予以擦除#7(MCL)0是否通过复位操作删除由MDI方式创建的程序:0:不予擦除;1:予以擦除P3204#6(MKP)1在MDI运行中,是否执行M02/M30或EOR(%)时自动擦除已经编写的MDI程序:0:予以擦除;1:不予擦除P3206#1(MIF)0是否禁止在维护信息画面上的编辑:0:不予禁止;1:予以禁止P3210XXXX程序保护,用来保护9000~9999号程序的密码P3211XXXX程序保护键,密钥输入正确,P3202#4(NE9)可以修改编辑有效P321210顺序号自动插入时的增量值P3280#0(NLC)1显示语言的动态切换是否有效:0:有效;1:无效(由P3281参数设定修改)P328115显示语言: 中文(简体字)10、与程序相关的参数P3401#0(DPI)0在可以使用小数点的地址中省略小数点时:0:视为最小设定单位;1:视为mm 、inch、度、sec的单位(计算器型小数点输入)#4(MAB)0在MDI运行中,绝对/增量指令的切换:0:取决于G90/G91;1:取决于P3401#5#5(ABS)0/1将MDI运转中的程序指令:0:视为增量指令;1:视为绝对指令P3402#0(G01)1通电时以及清除状态时为:0:G00方式(定位);1:G01方式(直线插补) #1(G18)0通电时以及清除状态时为:0:G17方式(X-Y平面);1:G18方式(Z-X平面)#2(G19)0通电时以及清除状态时为:0:取决于P3202#1;1:G19方式(Y-Z平面)#3(G91)0通电时以及清除状态时为:0:G90方式(绝对指令);1:G91方式(增量指令)#4(FPM)1通电时以及清除状态时为:0:G99或G95方式(每转进给);1:G98或G94方式(每分钟进给)#5(G70)0英制输入和公制输入的指令为:0:G20(英制输入)和G21(公制输入);1:G70(英制输入)和G71(公制输入)#6(CLR)0通过按MDI面板上的RESET等以及紧急停止:0:置于复位状态;1:清除状态#7(G23)1通电时为:0:G22方式(存储行程检测接通);1:G23(存储行程检测断开)P3403#5(CIR)1在圆弧插补指令,在没有指定I/J/K和R时:0:以直线插补方式移动到终点;1:发出报警P3404#0(NOB)1程序执行中,只对O号、N号、EOB的程序段:0:不予忽略;1:予以忽略#2(SBP)O外部设备子程序调用M198中的P地址为:0:文件号指定;1:程序号指定#4(M30)0执行M30,执行程序开始位置的检索,#5(M02)0执行M02,执行程序开始位置的检索,#7(M3B)1可以在1个程序段内指定的M代码的数量为:0:1个;1:最多3个P3405#1(DWL)0暂停G04: 0:始终为每秒钟暂停;1:在每分进给方式下为每秒暂停,在每转进给方式下位每转暂停P341120阻止缓冲的M代码1:(用于自动换刀程序MARCO中)11、与主轴控制相关的参数P3701#1(ISI)0设定路径内的主轴数(串行主轴数1个)本参数在主轴串行输出有效的情况下(P8133#5="0")有效#4(SS2)0P3702#1(EMS)1是否使用多主轴控制功能:0:使用;1:不使用P3706#5(ORM)0主轴定向时的电压极性为: 0:正极;1:负极#6(CWM)0主轴速度输出时的电压的极性: M03,M04均为正#7(TCW)0P3708#6(TSO)0螺纹切削、攻丝循环中的主轴倍率:0:无效(被固定在100%上);1:有效P3716#0(A/Ss)1主轴电机的种类为:0:模拟主轴;1:串行主轴P37171各主轴的主轴放大器号:0:放大器未连接;1:使用1号放大器号的主轴电机P3*******位置编码器的脉冲数P37211位置编码器一侧的齿轮的轮齿P37221主轴一侧的齿轮的轮齿P3732实际调整主轴定向时的主轴转速或主轴齿轮位移时的主轴电机速度P37350主轴电机的最低牵制速度P3*******主轴电机的最高牵制速度P3*******与齿轮1对应的各主轴的最大转速P3798#0(ALM)0所有主轴的主轴报警:0:有效;1:被忽略P3799#0(NALs)0是否显示主轴放大器一侧的报警:0:予以显示;1:不予显示#2(ASDs)1在使用串行主轴的情况下,主轴速度:0:基于来自位置编码器的反馈脉冲进行计算;1:基于速度监视器进行计算#5(SSHs)1主轴总转速数据向诊断画面的显示:0:无效;1:有效注释:(参数4000~4799为串行主轴放大器使用,参数设定细节参阅 B-65280CM参数说明书)1、在串行接口主轴参数中,有关参数(NO.4015),用户不能改变设定,这些参数需要有CNC软件选项,并根据其安装状态被自动设定。