摄像机的一种主动视觉标定方法_朱嘉
摄像机标定 方法

摄像机标定方法摄像机标定是计算机视觉领域的一项重要任务,主要目的是确定摄像机的内外参数,以便将图像中的像素坐标转换为世界坐标。
摄像机标定有多种方法可供选择,其中包括使用标定物体、使用棋盘格、使用角点等。
下面将详细介绍其中的几种方法。
第一种方法是使用标定物体进行摄像机标定。
该方法需要摄像机拍摄带有已知尺寸的标定物体,例如固定尺寸的棋盘格或标尺。
通过测量图像中标定物体的像素坐标和已知尺寸,可以计算出摄像机的内外参数。
这个过程通常涉及到图像坐标和世界坐标的转换,以及通过最小二乘法进行参数求解。
第二种方法是使用棋盘格进行摄像机标定。
这种方法是比较常用且简单的一种标定方法。
首先,在摄像机拍摄的图像中绘制一个棋盘格,然后使用摄像机内参数和外参数将棋盘格的世界坐标与图像坐标建立对应关系。
通过采集多幅图像并测量每幅图像中的棋盘格角点的像素坐标,可以得到摄像机的内外参数。
这个过程通常使用角点检测算法来自动检测图像中的棋盘格角点。
第三种方法是使用角点进行摄像机标定。
这种方法也是比较常用的一种标定方法。
和使用棋盘格类似,该方法也是通过摄像机内参数和外参数将角点的世界坐标与图像坐标建立对应关系。
角点通常是由几条直线的交点或者是物体的尖锐边缘。
通过采集多幅图像并测量每幅图像中的角点的像素坐标,可以得到摄像机的内外参数。
这个过程通常也使用角点检测算法来自动检测图像中的角点。
除了上述几种常用方法,还有其他一些比较新颖的摄像机标定方法。
例如,基于模板匹配的方法可以在不需要标定物体的情况下估计摄像机的内外参数。
这种方法需要摄像机拍摄多幅图像,并在每幅图像中定位模板。
通过比较模板在不同图像中的位置,可以估计摄像机的内外参数。
此外,还有基于结构光的方法和基于手眼标定原理的方法等。
总之,摄像机标定是计算机视觉领域的一项重要任务,有多种不同的方法可供选择。
使用标定物体、棋盘格、角点等进行摄像机标定是常见的方法。
这些方法可以通过采集多幅图像并测量像素坐标,计算摄像机的内外参数。
一种高效的视觉导航摄像机标定方法

形棋盘格的角点 ,求 出摄像机参 数初始值 ,运用 L vn egMaq ad 算法对初始解进行非线性迭代优化 。通过重投 影方法将求出的角点重 e eb r- rurt
新投影到矩形棋盘格像平面上 ,并与原提取的角点相 比较,分析产生位置误差的原 因。实验结果表 明,该方法抗噪声能力强 ,对实验条件
o i [ srelAi n th a r abaini ii n n v g t n s s e o b l o o ,t i a e r p s s a f c e t meho fc me a Abta t miga ecmeacl rt t i o n v so a i a i y t m fmo ie r b t h s p p r p o o e n e f in t d o a r
息的基本要求 ,本文提 出一种高效的视觉导航摄像机标 定方
如果在不 同的位置获取 了 幅图像 ,则可 以获得和式() 2
类似的 个 方程组 。
法 ,并验证 了所提方法的实用性 ,为计算其他移动平台视觉 导航系统 的摄像机标定提供 了有用的参考 。
rpoet oterc nua h cb ad tecmese t ce r o ae t u ht n fr , n h asso r raeaaye . e e rjce t h et g l cek o r,h o r x atdaec mp dwi Ho g aso d a r r r h r m adtecue f r r n lzd T eo h
第3 卷 第2 期 6 l
VL o 36
・
计
算
机
工
程
21 0 0年 l 月 1
No e v mbe 01 r2 0
人工智能原理与方法智慧树知到答案章节测试2023年哈尔滨工程大学

第一章测试1.下列关于智能说法错误的是()A:细菌不具有智能B:从生命的角度看,智能是生命适应自然界的基本能力C:任何生命都拥有智能D:目前,人类智能是自然只能的最高层次答案:A2.目前,智能的定义已经明确,其定义为:智能是个体能够主动适应环境或针对问题,获取信息并提炼和运用知识,理解和认识世界事物,采取合理可行的(意向性)策略和行动,解决问题并达到目标的综合能力。
()A:错B:对答案:A3.传统人工智能领域将人工智能划分为强人工智能与弱人工智能两大类。
所谓强人工智能指的就是达到人类智能水平的技术或机器,否则都属于弱人工智能技术。
()A:错B:对答案:B4.人类历史上第一个人工神经元模型为MP模型,由赫布提出。
()A:对B:错答案:B5.下列关于数据说法错误的是()A:数据可以分为模拟数据和数字数据两类B:我们通常所说的数据即能够直接作为计算机输入的数据是模拟数据C:在当今社会,数据的本质是生产资料和资产D:数据就是描述事物的符号记录,是可定义为有意义的实体答案:B6.下列关于大数据的说法中正确的有()A:大数据带来的思维变革中,更多是指更多的随机样本B:“大数据”是需要新处理模式才能具有更强的决策力、洞察发现力和流程优化能力的海量、高增长率和多样化的信息资产C:“大数据时代”已经来临D:大数据具有多样、高速的特征答案:BCD第二章测试1.人工智能使人类改造自然、适应自然的各类技术发展到最高阶段,智能技术使得工具变得有智能,促使技术在以指数级增长速度加速进化(加速回报定律)。
()A:错B:对答案:B2.联结主义认为人的思维基元是符号,而不是神经元;人的认知过程是符号操作而不是权值的自组织过程。
()A:错B:对答案:A3.科学研究能够逐步理解如何从大脑的结构和机制上产生知觉、记忆和行为的意识表现,这些所谓“简单问题”的科学研究,都无法越过物质与精神的藩篱,解决身心关系的“困难问题”,证明主观意识如何从物质基础上涌现出来。
主动视觉相机标定算法
主动视觉相机标定算法
主动视觉相机标定算法是一种通过控制相机进行特定运动以确定其内部和外部参数的方法。
该算法的优点在于其简单性和鲁棒性,但也有系统成本高、实验设备昂贵和实验条件要求高的缺点。
在主动视觉相机标定算法中,相机的某些运动信息是已知的,因此可以利用这些信息对相机进行标定。
该方法不需要使用标定物,而是通过控制相机进行某些特殊运动,利用这种运动的特殊性来计算相机的内部参数。
主动视觉相机标定算法的优点是算法简单,通常能够获得线性解,因此具有较高的鲁棒性。
然而,该方法的缺点是系统的成本高、实验设备昂贵、实验条件要求高。
此外,这种方法也不适合于运动参数未知或无法控制的场合。
总的来说,主动视觉相机标定算法是一种重要的相机标定方法,尤其适用于需要高精度和鲁棒性要求的应用场景。
基于主动视觉摄像机标定方法
基于主动视觉摄像机标定方法Title: Camera Calibration Methods Based on Active Vision摘要:摄像机标定是计算机视觉和机器人视觉中的重要任务,用于确定摄像机的内部参数和外部参数。
这些参数对于原始图像的像素坐标和真实世界中的点之间的关系具有重要意义。
本文将讨论基于主动视觉的摄像机标定方法。
引言:在计算机视觉和机器人视觉应用中,摄像机标定是将二维图像空间与真实世界三维空间相对应的关键步骤。
通过标定,可以获得摄像机的内部参数(例如焦距、主点位置、径向和切向畸变等)和外部参数(例如相机在世界坐标系下的位置和方向)。
这些参数对于估计图像中物体的尺寸、相机姿态和相机运动等任务至关重要。
主体:基于主动视觉的摄像机标定方法通过特殊的标定模式或动态场景来改变图像中的特征点位置,从而获取更多的约束信息。
这些方法可以分为基于特征点(如棋盘格、圆圈网格等)的标定方法和基于纹理的标定方法。
基于特征点的标定方法通常使用已知精确尺寸的标定模式,其特征点位置可以在图像中被检测到。
通过对这些特征点的像素坐标与真实世界中的三维坐标进行匹配,可以求解出摄像机的内部参数和外部参数。
基于纹理的标定方法则利用了图像的纹理信息。
它们使用具有高频纹理特征的标定图案,如条纹或棋盘格纹理。
通过在摄像机看到的图像中检测和跟踪这些纹理,可以确定摄像机的内部参数和外部参数。
结论:基于主动视觉的摄像机标定方法通过引入额外的约束信息,可以提高标定的精度和鲁棒性。
在实际应用中,选择合适的标定方法取决于具体的场景和摄像机特性。
研究人员可以根据实际需求选择最合适的标定方法,并根据需要对其进行改进和优化。
关键词:摄像机标定、内部参数、外部参数、主动视觉、特征点、纹理。
一种简单易行的摄像机标定方法
一种简单易行的摄像机标定方法
屠海洋;袁章新;曹健
【期刊名称】《上海船舶运输科学研究所学报》
【年(卷),期】2005(028)002
【摘要】提出一种适用于电视测量系统中的方便的投影参数求取方法,主要着眼于方法的易用性,并在此基础上设计出了一套用于自动测量船模运动参数的电视测量系统.它首先利用测试卡上的方格线求出摄像机镜头的变形修正系数,然后利用已知的5个地面坐标与图像中的对应点的关系求出摄像机的标定参数.根据上述两步得出的参数,可以通过图像上的任何一个像素点计算出其在地面上的对应坐标值.实验证明,本文提出的方法是有效的,且能够比较方便地解决视觉监控中摄像机标定的问题.
【总页数】5页(P124-127,123)
【作者】屠海洋;袁章新;曹健
【作者单位】上海船舶运输科学研究所运输部,上海,200135;上海船舶运输科学研究所运输部,上海,200135;上海交通大学计算机系,上海,200030
【正文语种】中文
【中图分类】TP391.41
【相关文献】
1.企业实用安全评价方法初探--一种简单易行的企业自我评价方法 [J], 白文元;何昕;赵云胜
2.一种构造连生状态生命表的简单易行方法:方法和理论 [J], 丁芳清;钱林义;杨亚松
3.企业实用安全评价方法初探--一种简单易行的企业自我评价方法 [J], 白文元;何昕;赵云胜
4.一种简单易行的小鼠尾静脉注射方法和验证方法 [J], 胡娜;邓诗瑜;许珍珍;冯子奕;王洋
5.一种简单易行的珍珠质量评价方法——CLASS评价方法 [J], 万晓昌; 熊燕; 武垠彤; 崔丹露; 翟少华
因版权原因,仅展示原文概要,查看原文内容请购买。
摄像机自标定方法的研究与进展

第29卷 第1期2003年1月自 动 化 学 报ACT A AUT OM ATIC A SI NIC A V ol 129,N o 11Jan.,2003 摄像机自标定方法的研究与进展1)孟晓桥 胡占义(中国科学院自动化研究所模式识别国家重点实验室 北京 100080)(E 2mail :{mengxq ,huzy}@ )摘 要 该文回顾了近几年来摄像机自标定技术的发展,并分类介绍了其中几种主要方法.同传统标定方法相比,自标定方法不需要使用标定块,仅根据图像间图像点的对应关系就能估计出摄像机内参数.文中重点介绍了透视模型下的几种重要的自标定方法,包括内参数恒定和内参数可变两种情形;最后还简要介绍了几种非透视模型下的摄像机自标定方法.关键词 摄像机自标定,小孔模型,无穷远平面,绝对二次曲线(曲面)中图分类号 TP3911)国家自然科学基金(60175009,60033010)和中国科学院交叉学科重大创新项目(K JCZ 1207)资助Supported by the Natural Science F oundation of P.R.China (60175009,60033010)and Multidisciplinary Research Program of CAS (K JCX 1207)本文通讯作者胡占义 C orresponding author :H U Zhan 2Y i收稿日期 2001208228 收修改稿日期 2002201216Received August 28,2001;in revised form January 16,2002R ecent Progress in C amera Self 2C alibrationME NG X iao 2Qiao H U Zhan 2Y i(National Laboratory o f Pattern Recognition ,Institute o f AutomationChinese Academy o f Sciences ,Beijing 100080)(E 2mail :{mengxq ,huzy}@ )Abstract W e present a review and classification of camera self 2calibration techniques developed in recent years.C om pared with traditional calibration techniques ,self 2calibration does not require a calibration object with known 3D geometry ,but only needs point correspondences from images to solve for the intrinsic parameters.Our main focus is on dealing with the pinhole camera m odel with either constant or varying intrinsic parameters.In the end ,we also give a brief review of self 2cali 2bration techniques under other camera m odels.K ey w ords Camera self 2calibration ,pinhole m odel ,the plane at in finity ,the absolute conic (quadric )1 引言摄像机标定是计算机视觉领域里从二维图像提取三维空间信息必不可少的步骤,被广泛应用于三维重建、导航、视觉监控等领域.广义上摄像机标定可分为三种:传统标定方法、基于主动视觉的标定方法和自标定方法.传统标定方法[1~3]需要使用经过精密加工的标定块,通过建立标定块上三维坐标已知的点与其图像点间的对应,来计算摄像机的内外参数;该方法的优点在于可以获得较高的精度,但标定过程费时费力,不适用于在线标定和不可能使用标定块的场合.基于主动视觉的标定方法需要控制摄像机做某些特殊运动,如绕光心旋转[4]或纯平移[5,6]等,利用这种运动的特殊性可以计算出内参数.该方法的优点是算法简单,往往能获得线性解,缺点是不能适用于摄像机运动未知或无法控制的场合(如手持摄像机等).以上两种标定方法均利用到场景或摄像机运动的信息,对于场景任意、摄像机运动未知的最一般的情形,则都无能为力.20世纪90年代初,Faugeras,Luong,Maybank等[7,8]首先提出了自标定的概念,使得在场景未知和摄像机任意运动的一般情形下标定成为可能.Faugeras等[7]从射影几何的角度出发证明了每两幅图像间存在着两个形如K ruppa方程的二次非线性约束,通过直接求解K ruppa 方程组可以解出内参数.鉴于直接求解K ruppa方程的困难,人们又提出了分层逐步标定的思想,即首先对图像序列做射影重建,在此基础上再仿射标定和欧氏标定.分层逐步标定的方法以Hartley的QR分解法[9]、Triggs的绝对二次曲面法[10]、P ollefeys的模约束法[11]等为代表.针对在实际应用中摄像机内参数会实时改变的情形,人们进一步提出了可变内参数下摄像机自标定的概念.Heyden,≅strϕm,P ollefeys等[12,13]从理论上证明:在内参数满足一定条件的前提下,可变内参数下的自标定是完全可能的,P ollefeys等[13]还给出了一种比较实用的可变内参数下的摄像机自标定方法.从本质上说,所有自标定方法都只是利用了摄像机内参数自身存在的约束,这些约束与场景和摄像机的运动无关,这也是自标定方法较前两种标定方法更灵活的原因.2 预备知识2.1 符号约定为表示三维欧氏空间中的无穷远量,通常把该空间中任意一点记作x=(X,Y,Z,t)T,并称之为该点的齐次坐标,齐次项t=0对应着无穷远平面上的元素,补充了无穷远元素的欧氏空间被称为扩充的欧氏空间.相应地,二维平面上的点对应的齐次坐标为m=(x,y,t)T, t=0对应着无穷远直线上的元素.除非特别申明,本文所用到的坐标(包括点、矢量、平面方程、直线方程等)均为齐次坐标,用小写黑体表示.矩阵则用大写白体表示.2.2 摄像机模型通常使用的是针孔模型[14].在该模型下,摄像机按透视射影变换将空间点x=(X,Y, Z,1)T投影到像点m=(x,y,1)T,用公式写成λm=P x(1)投影矩阵P可进一步分解成P=K[R -R t] (K=αf s u0f v0001).这里R,t分别是世界坐标系到摄像机坐标系的旋转矩阵和平移矢量,被称为摄像机外参数;K是将摄像机坐标系变换到图像坐标系所需的只与摄像机自身有关的参数矩阵,称之为摄像机内参数矩阵;(u0,111 1期孟晓桥等:摄像机自标定方法的研究与进展v 0)为主点坐标(principle point );f 为有效焦距(effective focal length );α为纵横比(aspect ratio );s 为倾斜因子(skew factor ).摄像机自标定的目的就是要求解矩阵K .2.3 绝对二次曲线与摄像机自标定密切相关的两个重要概念是绝对二次曲线Ω(abs olute conic )和绝对二次曲面(abs olute quadric )Ω3[15].在扩展欧氏坐标系(无穷远平面方程为t =0)中,绝对二次曲线被定义为无穷远平面上的一个虚二次曲线,令x =(X ,Y ,Z ,0)T 是它上面的任一点,则x满足X 2+Y 2+Z 2=0,t =0.点x 在摄像机投影矩阵P =K (R -R t )的作用下成像为m KR x (这里“ ”表示相差一个常数因子下的相等),则得到x R T K -1m ,代入绝对二次曲线的方程x T x =0可得m T K -T RR T K-1m =m T K -T K -1m =0.通常用ω记矩阵K -T K -1所代表的绝对二次曲线的像,用ω3记ω的对偶[15](指所有与ω相切的直线族组成的包络).上式表明,在内参数恒定的前提下,Ω相当于一个虚拟的标定块,无论摄像机如何运动,它均能被“看到”,且所成的像ω保持不变.Ω的这种不变性是几乎所有自标定方法的基础.自标定的目标就是要寻找ω(或ω3)并计算出K -T K -1,再对K -T K -1取逆得到KK T ,对KK T 做Cholesky 分解[16],即可求出内参数矩阵K .2.4 绝对二次曲面绝对二次曲面Ω3是空间中一个特殊的虚二次曲面.从代数角度考虑,Ω3在扩展欧氏坐标系(无穷远平面方程为t =0)中的二次型为Ω3=I 3×30T 0(2)在任意射影坐标系下,该二次型将成为一个形式不固定、半正定、秩为3的4×4矩阵.如果再从几何角度考虑,(2)式所代表的几何元素有两种理解方式:(Ⅰ)Ω3可以被看成一个由点的轨迹组成的曲面,该曲面上的任意点x 均满足方程x T Ω3x =0,此时该曲面是被压缩到无穷远平面上的一个退化的二次曲面,它落在无穷远平面上的边缘即为绝对二次曲线,它所成的像等同于ω;(Ⅱ)Ω3也可被理解成由一组平面族组成的包络,该包络中任意平面的法向矢量n T 均满足方程n T Ω3n =0,容易证明,该包络中任意平面均与绝对二次曲线Ω相切,所以Ω3等同于Ω的对偶(abs olute dual quadric ),且该包络的成像也等同于绝对二次曲线像的对偶ω3.在第二种理解方式下,若设P 为投影矩阵,则Ω3应满足ω3 P Ω3P T .1)这里的欧氏变换=标准欧氏变换(旋转和平移)+总体尺度因子变换.下同.上式非常重要,它是在第3节中将介绍的许多自标定方法的基础.与Ω类似,Ω3也是欧氏变换1)下的几何不变量,但Ω3在代数处理上较Ω有更多的优越性,这是因为我们已由213节知Ω是一个二维几何元素,它的定义需要两个方程,其中包括支持它的无穷远平面方程;而Ω3则是三维几何元素,它的定义很自然地将无穷远平面方程和自身方程合为一体,因此可以直接把Ω3放在三维射影坐标系中加以研究,这在许多场合会带来便利.2.5 单应矩阵设π为空间中任意平面,在π上建立二维射影坐标系后,用x 记落在π上的任意一点的齐次坐标,用m ,m ′记该点在两图像上的对应像点,则关系式m H 1x ,m ′ H 2m 成立.211自 动 化 学 报29卷当平面π不通过任一光心时,上式中的H 1,H 2均是3×3的非奇异矩阵,习惯上我们称H 1为π到第一幅图像的单应矩阵(hom ography ),H 2为π在两幅图像间的单应矩阵.2.6 多视点间的几何关系1)双视点.在双视点结构下,图像间的对应点遵循着众所周知的对极几何关系[14](epipolar ge 2ometry ).如图1,摄像机分别在不同的光心位置C ,C ′摄取图像,给定第一幅图像上的点m ,则它的对应点m ′必然落在由x CC ′三点确定的平面π与第二个图像平面的交线l ′m 上,同理,m 必然落在平面π与第一个图像平面的交线l m 上.这种约束关系是两幅图像间最基本的几何关系,习惯上称为极线约束,从数学上可以描述为m ′T F m =0(3)式中F 是秩为2的3×3矩阵,习惯上被称为基础矩阵(fundamental matrix ).关于F 的性质的讨论,请参阅文献[17,18].由于基础矩阵F 包含了两幅图像间的所有几何信息,因此精确地计算F 对于摄像机标定和三维重建具有重要意义.常用计算F 的方法是直接基于(3)式的8点算法,原理如下:设m =[u v 1]T ,m ′=[u ′v ′1]T ,将F 写成由各分量组成的列矢量形式,即f =[F 11F 12F 13F 21F 22F 23F 31F 32F 33]T ,则对每一对对应点对(m ,m ′),可写出方程[uu ′ vu ′ u ′ uv ′ vv ′ v ′ u v 1]f =0.将n (n ≥8)个这样的方程叠加起来得到线性方程组Af =0,再利用S VD分解[19]可求出该方程组的最小二乘解.8点算法简单易行,但实验表明图像中有噪声时,矩阵A 的条件数极大,不容易得到精确解.为克服这一弊端,Hartley 在文献[17]中将图像点坐标规一化到区间[-1,1],大大降低了矩阵A 的条件数,提高了求解的精度.关于其它求解F 的方法请参见文献[20].2)三视点.令(m ,m ′,m ″)是三视点间的一组对应点,它们之间的线性关系可以用一个3×3×3的三视点张量T (trifocal tens or )来描述[21](如图2),关系式如下:m ″l =m ′i ∑3k =1m k T kjl -m ′j ∑3k =1m k T kil .上式遵循Einstein 约定,下标i ,j ,k 表示坐标分量,取值范围为1,2,3,相互之间的取值遵循着叉乘规定.相应地,直线也有类似关系[22,23],若令(I ,I ′,I ″)是三视点间的一组对应直线,则它们满足I i =∑3j =1∑3k =1I ′j I ″k T ijk .关于三视点张量的性质和计算的进一步讨论请参见文献[24,25].3)更多视点.与三视点类似,四视点间的几何关系可以用四视点张量(quadrifocal tens or )来描述,Hartley 在文献[26]中讨论了四视点张量的性质并给出了计算方法.由于射影空间中3111期孟晓桥等:摄像机自标定方法的研究与进展点的齐次坐标只有4个分量,多于四视点的图像对应点之间将不再有新的约束关系,具体证明请参见文献[27].对多视点间几何关系的深入讨论请参见文献[25,28,29].另外,最近Ma Y 在文献[30]中证明,从代数的观点看,四视点张量不是一个独立的约束,它可以分解成基本矩阵约束和三视点张量的组合.2.7分层重建与摄像机标定紧密联系的是三维欧氏重建,在这里我们将简要地介绍分层重建的概念.通常我们所建立的世界坐标系是欧氏意义下的,但在某些场合,建立比欧氏坐标系更广泛的仿射,甚至射影坐标系可能会带来便利.Faugeras 在文献[31]中首先提出了将三维欧氏重建分解成三步:1)根据图像对应点得到射影重建(也称为射影标定),并计算出射影意义下的摄像机投影矩阵.实现射影重建的方法很多,请参阅文献[32~37]等;2)在射影重建所恢复的射影空间中,确定无穷远平面的位置,把射影空间升级到仿射空间,这一步也称为仿射标定;3)在仿射重建的基础上,进一步施加约束,确定绝对二次曲线(面)像的方程并计算出内参数,从而最终恢复出欧氏结构.射影重建也称为射影标定,其定义如下:设空间中第k 个点的齐次坐标为x k ,它在第i 幅图像上的像点为m ik ,射影重建即是要找到一组3×4的矩阵P i ,满足λik m ik =P i x k (4)显然,从射影重建恢复出的射影坐标系不是唯一的,因为对于空间中任意一个射影变换(用一个4×4的非奇异矩阵H 表示),形如({P i H -1},{H x k })的射影重建都满足(4)式.摄像机的完全自标定和欧氏重建要求找到唯一的H ,能将P i 变换到欧氏意义下的摄像机投影矩阵,即要对所有的i 满足P i H -1=K (R i -R i t i )(5)如果以第一幅图像为基准做射影对齐,将(4)式改写成P 1 [I 0], P i [H 1i e 1i ](i ≥2)(6)上式中的e 1i 是极点,H 1i 是参考面的单应矩阵,此参考面被证明[38]可以是射影空间中的任意平面.作射影对齐后,在(6)式右边做具有如下形式的H A 变换H A =I0a T σ-1(7)将不会改变P 1.上式中的σ是尺度因子,a 是某一平面的法向矢量,这意味着作形如(7)式的射影变换其实就是改变了参考面.如果确定了法向量为a ∞的某平面为无穷远平面,并作形如(7)式的变换将无穷远平面变为参考面,则射影空间被升级到仿射空间,此时无穷远平面的单应矩阵可通过式H ∞1i H 1i +e 1i a T ∞ (8)与H 1i 联系起来.从(8)式确定出H ∞1i 后即得到了仿射重建,此时摄像机成像矩阵为P i [I 0], P i [H ∞1i e 1i ](9)如果进一步求出了摄像机内参数矩阵K ,则在(9)式规定的仿射空间里作仿射变换H E 可将仿射重建升级到欧氏重建,H E 具有形式H E=K 00σ-1(10)将(10)式中的H E 作用于(9)式的右边,可以得到欧氏意义下的摄像机成像矩阵411自 动 化 学 报29卷P E 1 K [I 0], P Ei K [R i -R i t i ](11)3 自标定方法综述在这一节里,我们按照自标定方法提出的时间和方法的共性分类.所有自标定方法均是针对运动的单个摄像机而言,摄像机采用的是针孔模型,并假定匹配点对应已经确定.以下除非特殊申明,摄像机的内参数均保持恒定.3.1 直接求解K ruppa 方程的自标定Faugeras ,Luong ,Maybank 等提出的自标定方法是直接基于求解K ruppa 方程的一种方法[5,32],该方法利用绝对二次曲线像和极线变换的概念推导出了K ruppa 方程.如图3,在光心C 对应的图像平面1上,存在着两极线l 1,l 2与ω相切,在光心C ′对应的图像平面2上也存在着两极线l ′1,l ′2与ω′相切(ω,ω′分别是绝对二次曲线Ω在图像平面1,2上的像).根据射影几何[15]的原理,l 1与l ′1,l 2与l ′2分别对应着无穷远平面π∞上两条与绝对二次曲线相切的直线,这种对应被称为极线变换[7].如果将极线l 1表示成e ×m ,其切点m 在图像平面2上形成的极线即为l ′1,而l ′1的方程可用基础矩阵表示为F m ,则根据极线变换得(e ×m )T KK T (e ×m )=m T [e ]T×KK T [e ]×m Ζ(Fm )T KK T (Fm )=m T F T KK T F m ,Πm ,即[e ]T ×KK T [e ]× F T KK T F (12)式中[]×表示矢量的反对称矩阵.从(12)式可以得到5个关于ω分量的二次方程,但其中只有2个是独立的[39].(12)式常由于其形式的特殊被称为K ruppa 方程.容易看出,从两幅图像总共可以得到2个K ruppa 方程,在给定3幅图像的情形下,原则上通过联立求解可解出摄像机的全部5个内参数.围绕着求解K ruppa 方程,文献中存在着不同的途径.Faugeras ,Maybank 等[7,8]最早提出的算法完全基于代数几何的概念,该算法对噪声极其敏感,普通计算机的浮点运算已不足以5111期孟晓桥等:摄像机自标定方法的研究与进展满足其要求.Luong [39]提出了一套基于连续同伦算法[40]的较实用的求解策略,降低了对噪声的敏感度,但该策略要求拐点的提取精度达到子像素级(0.2个像素).这两种直接求解K ruppa 方程的方法存在着共同的弊端:求解困难,而且是针对两两图像之间列方程,当图像数目增加时,可能解的个数呈指数增长,使得直接求解失去意义.另一类求解K ruppa 方程的途径是间接的非线性优化算法,Z eller 等[41]利用K ruppa 方程计算出多幅图像上的所有点到对应极线距离之和,再利用Levenberg 2Marquardt 优化算法[42]减小该距离,并求出相应的内参数;文献[27]则首先令(12)式两边的模相等以消去常数因子,再直接对两边的代数距离进行优化,优化函数如下(令F (A )=A Π‖A ‖F ,‖‖F 表示Frobenius 模):c K (K )=∑i >j ‖F (KK T )-F (F T ji KK T F ji )‖F .上述优化算法的缺点在于,待优化参数过多,且容易陷入局部最优值.部分学者[43,44,39]还通过简化摄像机模型以降低K ruppa 方程的求解难度,如Hartley 在文献[44]中假设除焦距f 外的其它内参数均已知,利用对基础矩阵F 的S VD 分解从两幅图像中计算f .我们注意到在2000年的ECC V 会议上,Ma 等[45]对K ruppa 方程的奇异性和可解性做了详细的分析.Ma 等在文献[45]中证明:在某些特殊情形下(如摄像机的旋转轴平行或垂直于平移矢量),K ruppa 方程可以被归一化为线性方程,相应的自标定算法也成为线性方法.文献[45]还给出了利用K ruppa 方程自标定的充分性证明.基于K ruppa 方程的自标定方法不需要对图像序列做射影重建,而是对两两图像之间建立方程,在某些很难将所有图像统一到一个一致的射影框架的场合,该方法会较下面将介绍的分层逐步标定法更具有优势,但获得这种优势的代价是:在从(12)式推导出K ruppa 方程时,隐含将无穷远平面的3个未知数消去了,这意味着无法保证无穷远平面在所有图像对确定的射影空间里的一致性,从而也部分解释了当图像序列较长时,基于K ruppa 方程的自标定方法不稳定的现象.雷成等指出了基于K ruppa 方程标定摄像机存在的三种不鲁棒性原因[65].3.2 分层逐步标定近年来,分层逐步标定法成为自标定研究中的热点,并在实际应用中逐渐取代了直接求解K ruppa 方程的方法.分层逐步标定法首先要求对图像序列做射影重建(参见2.7节),再通过绝对二次曲线(面)施加约束,定出仿射参数(即无穷远平面方程)和摄像机内参数.限于篇幅,下面仅列出其中几种较有代表性的方法.1)Hartley 的方法.Hartley 在文献[9]中提出了一种直接对摄像机投影矩阵进行QR 分解的自标定方法,首先进行射影重建,做射影对齐后得到形如(6)式的摄像机投影矩阵序列.自标定的目标即是要寻找合适的射影变换H E ,将P i 变换到欧氏意义下的投影矩阵,即P i H E K [R i -R i t i ](13)在P 1 [I 3×3 03]的前提下,H E 共有8个未知数,且具有如下形式:H E K0a T ∞1(14)将(14)式代入(13)式,并取前三列得P iI a T ∞K K i R i (15)文献[9]首先通过预估计得到K ,a T ∞,再利用QR 分解法[16]分解(15)式的左边得到K i .611自 动 化 学 报29卷由于摄像机内参数保持恒定,K i 应接近于K ,利用Levenberg 2Marquardt 算法[42]对式∑i >0‖αi K i K -1-I ‖2(16)进行优化可以解出K .Hartley 方法利用了QR 分解法消去旋转矩阵R ,这是该方法的最大特色.该方法的优点在于当输入图像序列较长时,往往能取得较好的效果;不足之处在于其初始值必须预先知道.2)Heyden 和≅str ϕm 的方法.Heyden 和≅str ϕm 在文献[46]中提出了类似的方法.与Hartley 方法相同,文献[46]也利用了(6)式,但区别在于Heyden 等将(14)代入(13)式后,利用了R i R T i =I 消去R i 和t i 并得到λi P i KK T K T a ∞a T ∞K πT ∞a ∞P T i =KK T (17)通过优化下式可以解出内参数矩阵Kf (K ,a ∞,λi )=∑i λi P iKK T K T a ∞a T ∞K a T ∞a ∞P T i -KK T 2(18)该方法也存在着计算量大,优化的收敛性难以保证的弊端.必须指出的是,(18)式非常重要,它其实也是下面将介绍的Triggs 的基于绝对二次曲面、P ollefeys 的分层重建等方法的基础.3)P ollefeys 的方法.P ollefeys 等[47]从单应矩阵和绝对二次曲线出发推导出了类似文献[46]的结果.由于无穷远平面上的绝对二次曲线的像不随摄像机运动而改变,利用(8)式得λi KKT =[H 1i +e 1i a T ∞]KK T [H 1i +e 1i a T ∞]T (19)文献[48]建议利用Levenberg 2Marquardt 算法优化式∑n i =21λi F ([H 1i +e 1i a T ∞]KK T [H 1i +e 1i a T ∞]T )-F (KK T )F(20)以解出K .可以看出,优化函数(20)与(18)在形式上类似,都存在着未知的常数因子λi ,但在处理该常数因子上,P ollefeys 和Heyden 采用了不同的途径:Heyden 是将λi 看作独立的未知数与其它参数同时优化,而P ollefeys 则利用(19)式两边的模相等估计出λi =‖H 1i +e 1i a T ∞‖2(21)由于减少了待优化的未知数个数,优化函数将更易于收敛.P ollefeys 在文献[49]中还证明:该方法与基于K ruppa 方程的方法[7]、Heyden 等的方法[47]、Triggs 的基于绝对二次曲面的方法[10]等在本质上是相同的.以上我们介绍的三种方法有着共同的特点:都是在射影标定的基础上,以某一幅图像为基准做射影对齐,从而将未知数缩减至8个(无穷远平面参数3个和摄像机内参数5个,不包括总体常数因子),再通过非线性优化算法同时解出所有未知数.缺点在于:1)非线性优化算法的初值只能通过预估得到,不能保证收敛性;2)射影重建时均是以某参考图像为基准,参考图像的选取不同,标定的结果也不同,这不满足一般情形下噪声均匀分布的假设.3.3 基于绝对二次曲面的自标定Triggs [10]最早将绝对二次曲面的概念引入到自标定的研究中来,该方法的原理如下.由2.4节知,绝对二次曲面Ω3对应着图像上的绝对二次曲线像的对偶ω3,即下式成立ω3≌KK T =λi P i Ω3P T i (22)7111期孟晓桥等:摄像机自标定方法的研究与进展(22)式非常重要,它是将摄像机内参数的自身约束转移到对Ω3的约束的纽带.不难看出,(22)式与Heyden 等给出的(17)式在本质上是相同的,但Heyden 等并未给出其相应的几何解释.原则上通过联立求解(22)式组成的方程组可以计算出ω3.由于(22)式中的常数因子λi 随图像不同而改变,为消去λi ,对(22)式两边矩阵的对应项作叉乘[ω]kl [P i Ω3P T i ]k ′l ′-[ω]k ′l ′[P i Ω3P T i ]kl =0(23)上式中的[…]kl 表示矩阵第k 行第l 列元素.对于每一幅图像,可得到15个形如(23)式的方程,但其中最多只有5个是独立的[58].T riggs 提出了两种方法求解该方程组:第一种方法利用了S QP 优化算法(sequential quadrat 2ic programming ),在det (Ω3)=0的约束下直接求解代价函数∑i ‖ω∧(P i Ω3P T i )‖2的最小值,利用该方法,给定至少3幅图像即可完全标定,初始值由预估得到;第二种方法被称为半线性方法(quasi 2linear ),将ω,Ω3的分量分别组织成列矢量 ω6×1, Ω310×1,并以 ω Ω3T 的59个分量为未知数,则此时(23)式成为线性方程,再联立从多幅图像≥4)得到的所有这样的线性方程,在最小二乘意义下解出59个未知数.半线性方法存在着过分参数化的倾向,噪声大时误差也较大.基于Ω3的自标定方法与基于K ruppa 方程的方法在本质上是一致的,都是利用了绝对二次曲线在欧氏变换下的不变性,但在输入多幅图像并能得到一致射影重建的情形下,前者较后者更具有优势,其根源在于Ω3包含了无穷远平面和绝对二次曲线的所有信息,且基于Ω3的自标定方法又是在对所有图像做射影重建的基础上计算Ω3的,从而保证了无穷远平面对所有图像的一致性.与此相比,基于K ruppa 方程的方法是在两两图像之间建立方程,在列方程过程中已将支持绝对二次曲线的无穷远平面参数消去,所以当输入更多的图像对时,不能保证该无穷远平面的一致性.3.4 Pollefeys 的模约束以上介绍的分层逐步标定法有一个共同的特点:在得到射影重建后,将仿射标定和欧氏标定合为一步,一次性地求解出3个仿射参数(即无穷远平面参数)和5个摄像机内参数.而P ollefeys [11]提出的模约束法则是将仿射标定和欧氏标定分开进行,其原理如下.设H ∞ij 表示无穷远平面在图像i ,j 间的单应矩阵,联系H ∞ij 在欧氏坐标系下的表达式(11)和在射影坐标系下的表达式(8)可得到H T ij H ∞1j H ∞-11iKR T j R -T i K -1 (H 1j +e 1j a T ∞)(H 1i +e 1i a T ∞)-1(24)P ollefeys 由(24)式发现,H ∞ij 与一个旋转矩阵R T j R -T i 在相差一个尺度因子下共轭,则根据旋转矩阵的性质,H ∞ij 的3个特征值的模应相等,这就是所谓的“模约束”.必须指出的是,这种模约束只是在内参数矩阵K 恒定的情形下才成立.文献[11]进一步将模约束用H ∞ij 的特征多项式系数表达,即如果设H ∞ij 的特征多项式为det (H ∞ij -λI )=l 3λ3+l 2λ2+l 1λ1+l 0=0(25)则由模约束可推出如下必要条件l 3l 31=l 32l 0 (26)利用(24)式,将l i 写成关于a ∞的三个分量的表达式,从而由(26)式得到了关于a ∞的4次多项式约束,在最少3幅图像下,可通过联立求解4次多项式方程组计算出a ∞,将计算出的a ∞代入(19)式即可线性求解出绝对二次曲线的像KK T .此后,可以构造形如(20)的优化811自 动 化 学 报29卷。
摄像机自标定

m I e'
l'
n'
o
一些预备知识
基本矩阵的推导及形式
m
Pl
E
X 1
,
m'
பைடு நூலகம்
PrE
X 1
m KX , m' K (RX T ), T (K 1m' ) T RX
m' T K T [T ] RK 1m 0, m' T Fm 0
F K T [T ] RK 1
F 的秩为2,F在相差一个常数因子下是唯一确定的。 F 可以通过8对图象对应点线性确定。
过x 则
处x 的12切C线1参l 数, 代向入量上为式:可l 得:J x
2Cx
则 lT l 0 C 1
对偶线坐标曲线
一些预备知识
l3 C
对偶曲线示意图
x3
x1
l1
x2
l2
l1
点坐标曲线
l3
l2
对偶线坐标曲线
一些预备知识
欧几理得空间下的投影矩阵
如果X 为空间某一点,两摄像机间的坐标变换为:
XTX 0 t 0
X x y zT
一些预备知识
绝对二次曲线在图象上投影的性质
绝对二次曲线的象仅与摄像机的内参数有关,与摄 像机的运动参数无关
m KR
T
X 0
,
X RT K 1m
从定义 XTX=0 知,
mT K T K 1m 0
给定正定矩阵 C K T K 1 ,则 K 可以通过Cholesky
(e' )T Fmi 0
一些预备知识
m'
e'
l' n'
摄像机标定方法综述

摄像机标定方法综述摄像机标定是指将图像中的像素坐标与真实世界中的三维物体坐标相对应的过程。
摄像机标定在计算机视觉和机器视觉领域中广泛应用,比如目标识别、目标追踪、立体视觉等任务。
下面将就几种常用的摄像机标定方法进行综述。
1.直接线性变换(DLT)方法:直接线性变换是最早提出的摄像机标定方法之一、该方法通过摄像机拍摄具有已知三维坐标的物体,并通过图像中物体投影的像素坐标计算出摄像机内部的参数(如焦距和像素坐标系原点等)和外部参数(如摄像机的旋转和平移矩阵)。
DLT方法的精度受到图像中噪声和非线性畸变的影响,因此通常需要进行非线性优化。
2.张正友标定方法:张正友标定方法是基于经典的DLT方法而改进的一种摄像机标定方法。
该方法通过使用多个摄像机拍摄一组模板图案(如棋盘格),并根据图案在图像中的投影计算出摄像机的内外参数。
该方法克服了DLT方法的不足,可以有效地降低标定过程中的误差。
张正友标定方法已经成为摄像机标定的事实标准。
3.陈氏标定方法:陈氏标定方法是一种基于棋盘格划分的摄像机标定方法。
该方法相比于其他标定方法更具鲁棒性,能够处理大部分图像畸变,包括径向畸变和切向畸变。
陈氏标定方法不依赖于特定的图案设计,可以适用于各种不同形状和规模的棋盘格标定板。
此种标定方法能得到相对准确的摄像参数。
4.光束投影法:光束投影法也是一种常用的摄像机标定方法。
光束投影法通过摄像机对多个光束的拍摄,利用光束在三维空间中的重合关系来计算摄像机的内外参数。
光束投影法具有较高的精度和计算效率,可适用于复杂场景中的标定问题。
5.基于结构光的标定方法:结构光标定方法是一种基于投影的摄像机标定方法。
该方法使用一个激光投影仪将结构光(如条纹或网格)投影到摄像机视野中的物体上,然后通过分析图像中的结构光变形情况计算出摄像机的内外参数。
该方法具有较高的精度和稳定性,可适用于复杂环境下的标定。
以上介绍了几种常用的摄像机标定方法,每种方法都有其适用的特定场景和优缺点。
摄像机标定方法综述
摄像机标定方法综述摘要:首先根据不同的分类方法对对摄像机标定方法进行分类,并对传统摄像机标定方法、摄像机自标定方法等各种方法进行了优缺点对比,最后就如何提高摄像机标定精度提出几种可行性方法。
关键字:摄像机标定,传统标定法,自标定法,主动视觉引言计算机视觉的研究目标是使计算机能通过二维图像认知三维环境,并从中获取需要的信息用于重建和识别物体。
摄像机便是3D 空间和2D 图像之间的一种映射,其中两空间之间的相互关系是由摄像机的几何模型决定的,即通常所称的摄像机参数,是表征摄像机映射的具体性质的矩阵。
求解这些参数的过程被称为摄像机标定[1]。
近20 多年,摄像机标定已成为计算机视觉领域的研究热点之一,目前已广泛应用于三维测量、三维物体重建、机器导航、视觉监控、物体识别、工业检测、生物医学等诸多领域。
从定义上看,摄像机标定实质上是确定摄像机内外参数的一个过程,其中内部参数的标定是指确定摄像机固有的、与位置参数无关的内部几何与光学参数,包括图像中心坐标、焦距、比例因子和镜头畸变等;而外部参数的标定是指确定摄像机坐标系相对于某一世界坐标系的三维位置和方向关系,可用3 ×3 的旋转矩阵R 和一个平移向量t 来表示。
摄像机标定起源于早前摄影测量中的镜头校正,对镜头校正的研究在十九世纪就已出现,二战后镜头校正成为研究的热点问题,一是因为二战中使用大量飞机,在作战考察中要进行大量的地图测绘和航空摄影,二是为满足三维测量需要立体测绘仪器开始出现,为了保证测量结果的精度足够高,就必须首先对校正相机镜头。
在这期间,一些镜头像差的表达式陆续提出并被普遍认同和采用,建立起了较多的镜头像差模型,D.C.Brown等对此作出了较大贡献,包括推导了近焦距情况下给定位置处径向畸变的表达式及证明了近焦距情况下测得镜头两个位置处的径向畸变情况就可求得任意位置的径向畸变等[2]。
这些径向与切向像差表达式正是后来各种摄像机标定非线性模型的基础。
视觉标定的原理有哪些
视觉标定的原理有哪些
视觉标定是指为机器视觉系统建立相机的内外参数模型的过程。
内参数是指相机的固有属性,如焦距、主点位置等,而外参数是指相机的位置和姿态。
视觉标定的原理主要包括以下几个方面:
1. 像素和物理空间的关系:通过测量物体在图像中的像素坐标和物理空间中的坐标,可以建立像素和物理空间之间的对应关系。
这些对应关系可以用来推导相机的内外参数。
2. 畸变模型:相机的镜头引起的畸变是视觉标定中重要考虑的因素之一。
畸变模型可以描述镜头引起的径向畸变和切向畸变,是建立像素和物理空间之间的对应关系的基础。
3. 光线的反射和折射:相机中的光线在到达图像平面之前会发生反射和折射等现象,影响光线的方向和强度。
通过建立光线的反射和折射模型,可以推导出相机的内外参数。
4. 特殊标定板:视觉标定中常用的一种方法是利用特殊标定板。
特殊标定板通常具有已知的形状、尺寸和特征点,可以用来测量图像中的特征点坐标和物理空间中的坐标,进而进行相机的标定。
综上所述,视觉标定的原理主要包括像素和物理空间的对应关系、畸变模型、光线的反射和折射、以及特殊标定板等方面。
通过利用这些原理,可以建立相机的内外参数模型,从而实现机器视觉系统的精确测量和三维重建等功能。
视觉标定

X w , Yw , Z w 为 其中 u, v,1 为图像坐标系下的点的齐次坐标, 世界坐标系下的空间点的欧氏坐标, s P 为3 4 的透视投影矩 阵, 为未知尺度因子。
P34 pij
消去 s ,可以得到方程组:
p11 X w p12Yw p13 Z w p14 p31uX w p32uYw p33uZ w p34u 0 p21 X w p22Yw p 23 Z w p14 p31uX w p32uYw p33uZ w p34u 0
第9讲 摄相机标定
Camera calibration
主要内容
1、引言:什么是摄相机标定
2、摄相机标定方法的分类
3、传统摄相机标定方法(或利用景物信息
的标定方法)
4、主动视觉摄相机标定方法
5、摄相机自标定方法
1、引言
视觉目的
三维重建是人类视觉的主要目的,也是计算机视觉的最 主要的研究方向. (Marr 1982)
f 和 k1 的真实值。 估计出 t3 、
3.3、张正友的平面标定方法
张正友方法
张正友方法所用的平面模板
张正友方法 算法描述
1. 2. 3. 4. 5. 6. 打印一张模板并贴在一个平面上 从不同角度拍摄若干张模板图象 检测出图象中的特征点 求出摄像机的内参数和外参数 求出畸变系数 优化求精
所谓三维重建就是指从图象出发恢复出空间点三维坐标 的过程。 三维重建的三个关键步骤 • 图象对应点的确定 双目
• 摄像机标定 单个相机
• 二图象间摄像机运动参数的确定 单个相机运动
坐标系
1、世界坐标系:
X w , Yw , Z w
Xw Ow
一种基于交通视频的摄像机标定方法

一种基于交通视频的摄像机标定方法朱小平;付洋【摘要】介绍了一种线性模型下的摄像机标定方法。
在获取交通视频的基础上,利用实际路面上的参照物和图像处理的基本知识抽象出交通视频中的像素行和路面实际距离之间的几何模型,对几何模型进行解析,得到视频图像上像素行和实际路面的距离映射关系。
试验表明,该方法能够较好地实现图像上像素行到路面实际距离之间的转换。
%A method of camera calibration in linear model is introduced. On the basis of traffic video , geometric model between the pixel rows from the traffic video and actual road distance is abstracted by using the real pavement reference object and basic knowledge of image processing. Get mapping relation between video image pixel rows and actual pavement distance after analyzing geometric model. Experiments show that the method can better realize converting the image pixel rows into actual pavement distance.【期刊名称】《电子设计工程》【年(卷),期】2012(020)009【总页数】5页(P48-52)【关键词】交通视频;摄像机标定;线性模型;映射关系;像素;距离【作者】朱小平;付洋【作者单位】长安大学信息工程学院,陕西西安710064;长安大学信息工程学院,陕西西安710064【正文语种】中文【中图分类】TP29视频检测技术在交通信息检测中有着重要的应用,主要利用图像处理技术对获取到的交通视频图像进行一系列处理,提取出有用的信息,完成交通参数、交通状况和交通事件的检测,是 ITS(Intelligent Transportation System)中的一个热点研究方向。
视觉标定原理
视觉标定原理
视觉标定是一种技术,用于获取相机的内部参数和相对位置。
通过此过程,可以实现对图像的准确测量和三维重建等应用。
视觉标定的原理是根据特定的场景下的已知物体,通过计算图像上的坐标和实际物体的坐标之间的关系,推导出相机的内部参数和外部参数,从而得到相机的标定结果。
内部参数是指相机固有属性的参数,如焦距、主点、畸变等,这些参数对于不同的相机会有所不同,需要进行标定。
而外部参数则是指相机在世界坐标系下的位置和姿态,在进行三维重建等应用时需要使用。
视觉标定的方法有多种,其中最常用的是基于张正友标定法。
该方法通过拍摄多张已知物体的图片,进行角点检测和匹配,计算出相机的内部参数和外部参数。
此外,还有基于直接法的标定方法,如利用棋盘格来完成标定等,不过相对于张正友标定法,这些方法的精度和适用范围会受到一定限制。
视觉标定的应用非常广泛,如机器人视觉导航、虚拟现实、自动驾驶、医学影像等领域都需要用到视觉标定。
在实际应用中,需要结合实际场景和标定要求,选择合适的标定方法和标定物体,以达到尽可能高的标定精度。
- 1 -。
相机自标定原理
相机自标定原理概述相机自标定是指通过图像数据来估计相机的内部参数和外部参数的过程。
在计算机视觉和计算机图形学领域,相机自标定是非常重要的技术之一。
它可以用于三维重建、姿态估计、虚拟现实等多个应用领域。
传统的相机标定方法需要使用特殊的校准板或者特殊的校准设备来进行,而相机自标定则不需要这些额外的设备,只需要使用普通场景中的图像就可以完成标定过程。
相机自标定方法能够极大地提高标定过程的便利性和实用性。
相机模型在了解相机自标定原理之前,我们首先需要了解相机模型。
常用的相机模型是针孔相机模型。
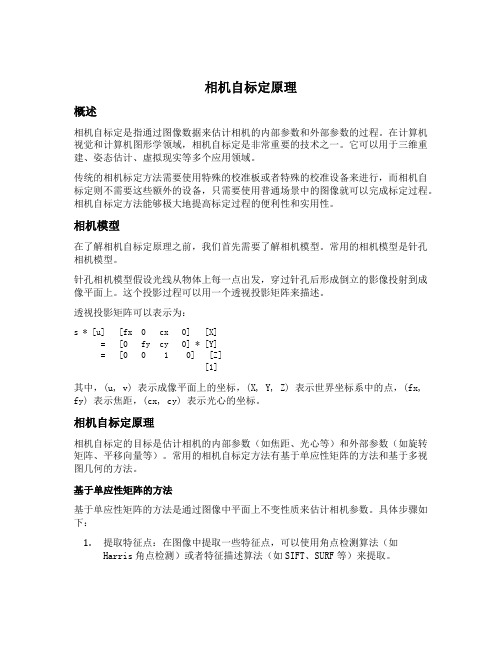
针孔相机模型假设光线从物体上每一点出发,穿过针孔后形成倒立的影像投射到成像平面上。
这个投影过程可以用一个透视投影矩阵来描述。
透视投影矩阵可以表示为:s * [u] [fx 0 cx 0] [X]= [0 fy cy 0] * [Y]= [0 0 1 0] [Z][1]其中,(u, v) 表示成像平面上的坐标,(X, Y, Z) 表示世界坐标系中的点,(fx, fy) 表示焦距,(cx, cy) 表示光心的坐标。
相机自标定原理相机自标定的目标是估计相机的内部参数(如焦距、光心等)和外部参数(如旋转矩阵、平移向量等)。
常用的相机自标定方法有基于单应性矩阵的方法和基于多视图几何的方法。
基于单应性矩阵的方法基于单应性矩阵的方法是通过图像中平面上不变性质来估计相机参数。
具体步骤如下:1.提取特征点:在图像中提取一些特征点,可以使用角点检测算法(如Harris角点检测)或者特征描述算法(如SIFT、SURF等)来提取。
2.匹配特征点:对于每一对图像之间的特征点,通过匹配算法来寻找它们之间的对应关系。
3.计算单应性矩阵:通过已知对应关系计算出单应性矩阵,单应性矩阵可以通过最小二乘法来估计。
4.分解单应性矩阵:通过对单应性矩阵进行分解,可以得到相机的内部参数和外部参数。
基于单应性矩阵的方法具有简单、快速的特点,但是对于非平面场景或存在畸变的图像可能会导致估计结果不准确。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第30卷 第5期光 学 学 报V ol.30,N o.52010年5月ACTA OPTICA SINICAMay,2010文章编号:0253-2239(2010)05-1297-07摄像机的一种主动视觉标定方法朱 嘉 李醒飞 徐颖欣(天津大学精密测试技术及仪器国家重点实验室,天津300072)摘要 提出了一种快速高精度的摄像机主动视觉标定方法,建立了摄像机模型并详细分析了其各项参数的求解算法。
标定时,令摄像机作一组二维的平移运动,采集圆孔靶标件的图像并计算圆心的像点坐标,同时记录摄像机的移动距离,得到标定所需的特征点。
利用这些特征点计算摄像机标定参数,标定精度可达到0.005mm 。
利用该方法定制的标定模块实现了摄像机的自动标定。
该方法对摄像机运动的限制条件较少,并基本实现了摄像机模型参数的线性求解,为主动视觉系统的摄像机标定提供了一种有效的解决方案。
关键词 机器视觉;摄像机标定;主动视觉;镜头畸变中图分类号 T P391 文献标识码 A do i :10.3788/AOS 20103005.1297Came ra Calibration Technique Base d on Active V isionZhu Jia Li Xingfei Xu Yingxin(Sta te Key L abor a t or y of Pr ecise Measur em en t T echnology an d In str u m en t ,T ia njin Un iver sit y ,T ia njin 300072,Chin a )Abstract A rapid and high -prec ision camera c alibration technique based on active vision is proposed.A c amera m odel and detailed analysis on the solution algorithm of its parameter are established.By in -plane translational motion of the c amera,images of a hollow target plate are collected to c alculate locations of the circular center.Meanwhile,the exact displacements of the c amera a re recorded;therefore the needed coordinates of the feature points in the object plane and in the correlative image plane a re ing these feat ure points,the cam era calibration parameters can be ca lculated with a precision of 0.005mm.Finally,automatic c alibration is realized by use of the custom ca libration module.The proposed method with less limiting conditions of c amera motion ba sic ally realizes linear solution of the para meters of camera model,and provides an effective solution of c amera calibration for active vision systems.Key wo rds machine vision;camera calibration;active vision;lens distortion收稿日期:2009-04-30;收到修改稿日期:2009-06-26作者简介:朱 嘉(1982)),男,博士研究生,主要从事数字图像处理、测试计量技术及仪器等方面的研究。
E -mail:s.1415926@g 导师简介:李醒飞(1966)),男,教授,博士生导师,主要从事多传感器融合技术、测试计量技术及仪器等方面的研究。
E -mail:lixf@1 引 言三维重建是机器视觉的主要研究方向。
视觉系统从摄像机获取的图像信息出发,计算三维场景中物体的形状、位置等几何信息。
像点与空间物点的几何对应关系由摄像机模型决定。
通过实验和计算确定摄像机模型参数的过程称为摄像机标定[1]。
现有的摄像机标定方法可分为传统标定方法、主动视觉标定方法和摄像机自标定方法[2]。
传统标定方法[3~6]过程复杂,并需要高精度的已知景物结构信息(常用精密加工的标定参照物);摄像机自标定方法[7~9]不依赖已知参照物,仅通过图像点的对应关系对摄像机作标定,灵活、应用范围广,但精度不高,稳健性不足;主动视觉标定方法[10,11]中,摄像机安置在可精确控制的运动平台上。
该方法利用已知的运动信息来建立关于摄像机模型参数的方程,并通常可线性求解,因此具有操作方便、精度高和稳健性好等优点,在主动视觉系统中得到了普遍应用。
目前常用的主动视觉标定方法有:基于摄像机纯旋转的标定方法[12]、基于三正交平移运动的标定方法[13]、基于平面正交运动的标定方法[11]、基于无穷光 学 学 报30卷远平面单应性矩阵的标定方法[14]和基于射影重建的标定方法等。
上述方法对摄像机运动提出了不同的限制条件,如至少二次互不平行的绕光心的旋转运动,三正交平移运动以及正交平移运动等,而目前主动视觉标定方法的研究焦点是在尽量减少对摄像机的运动限制的同时仍能线性求解[2]。
本文针对坐标测量机的摄像装置提出了一种基于平面运动的快速、高精度的主动视觉标定方法,标定时令摄像机作一组二维平移运动,采集圆孔靶标件的图像并计算圆心的像点坐标,同时记录摄像机的移动距离作为标定的特征点数据。
建立了包含17项参数的摄像机模型,讨论了摄像机模型各项参数的求解算法,并制定了摄像机标定的软件模块,实现了自动标定,为主动视觉系统的摄像机标定提供了一种有效的解决方案。
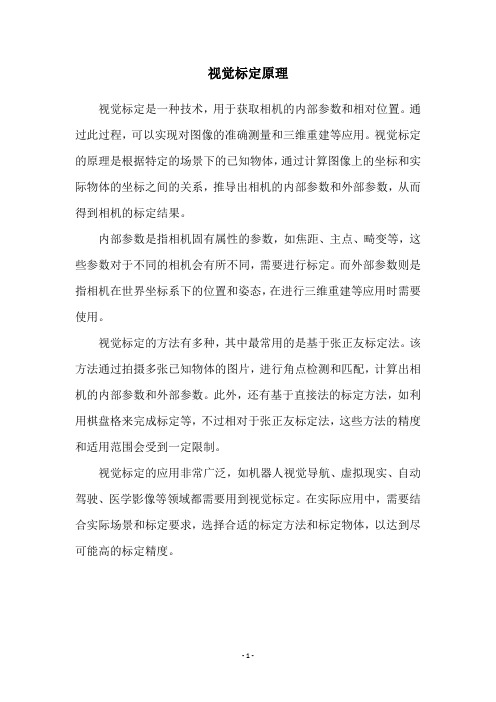
2 摄像机模型图1为H FXZ 型坐标测量机[15]:立柱作X 向移动,滑座沿立柱作Z 向移动;回转体工件固定在分度台上并随之转动,回转轴与Z 向平行;照明装置和电荷耦合器件(Charge coupled device,CCD)摄像装置构成测量机的机器视觉系统,在滑座及立柱的带动下作Z 向和X 向运动。
由摄像机测量的几何对应关系,建立仪器坐标系(X ,Y,Z),摄像机坐标系(x ,y ,z )及图像平面坐标系(U,V),如图2所示。
摄像机坐标系(x ,y ,z )以摄像机镜头的光学中心O 为坐标原点,y 轴与主光轴重合,x 和z 轴分别平行于图像平面的横、纵轴。
图像平面坐标系(U,V)表示的是经图像采集卡输出的像点坐标,单位为像素,坐标原点定义在图像平面的左上角。
摄像机镜头主光轴与图像平面的交点为c(u 0,v 0)。
图1坐标测量机模型F ig.1M o del of coo rdinate measur ingmachine图2摄像机几何模型Fig.2Geomet ric model o f camera以下通过三维仪器坐标系下点P (X ,Y,Z)到其在图像平面坐标系下的像点P c (u d ,v d )的坐标变换过程建立摄像机的数学模型。
P 点位置在摄像机坐标系下表示为xy z 1=R t 01#X Y Z 1,(1)式中R =cos C cos B cos C sin B sin A -sin C cos A co s C sin B co s A +sin C sinA sin C co sB sinC sin B sin A +cos C cos A sin C sin B cos A -cos C sin A -sin Bcos B sin Acos B co s A为正交的旋转矩阵,(A ,B ,C )为如图2所示的3个欧拉角,t =[tx ,t y ,tz ]T 为平移向量。
针孔(Pinho le)模型下的理想投影变换为u v 1W K u K v K=f u J u 00f v v 001#xz y,(2)式中f u 和fv分别为图像平面坐标系横、纵轴方向的有效焦距,单位为pix el;J 为横、纵轴轴偏的修正因子;K 为非零的比例因子。
由于摄像机光学系统存在加工和装配误差,物点在图像平面上的实际成像点P c (u d ,v d )与理想像点P (u,v)之间存在光学畸变误差。
畸变主要包含由于镜头中各组镜的表面曲率存在误差引起的径向畸变(r adial distortion),因镜片组光心不共线造成12985期朱嘉等:摄像机的一种主动视觉标定方法的切向畸变(tangential disto rtio n)和因镜片制造及成像敏感阵列制造误差造成的薄透镜畸变(thinprism distortion)。
径向畸变和切向畸变分别表示为[16]D r=(k1Q2+k2Q4+k3Q6+,)uv,(3)D t=[p1(Q2+2u2)+2p2uv](1+p3Q2+,) [p2(Q2+2 v2)+2p1u v](1+p3Q2+,),(4)薄透镜畸变表示为[17]D p=s1s2Q2+s3s4Q4+,,(5)式中u=u d-u0,v=v d-v0,Q2= u2+v2;k i,i= 1,2,3,为径向畸变系数;p i,i=1,2,3,为切向畸变系数;s i,i=1,2,3,为薄透镜畸变系数。
令A d=u d,v d T,A c=u,v T,存在如下关系:A c=A d-#(D,A d),(6)即理想像点(或畸变矫正后的像点)坐标等于实际像点坐标与畸变误差之差。
式中#为非线性的畸变函数,它包含径向畸变D r、切向畸变D t和薄透镜畸变D p;D为畸变系数向量。
考虑D r,D t和D p中起主导作用的低次项[19],得到简化的畸变函数#^(D^,A d)=D^r+D^t+D^p=u(k1Q2+k2Q4)+p1(Q2+2u2)+2p2uv+s1Q2v(k1Q2+k2Q4)+p2(Q2+2v2)+2p1u v+s2Q2,(7)式中D^=[k1,k2,p1,p2,s1,s2]T为简化的畸变系数向量。
(1),(2),(5)和(6)式构建了摄像机模型,它包含6个外部参数H ext=[t x,t y,t z,A,B,C]T和11个内部参数H in t=[f u,f v,J,u0,v0,k1,k2,p1,p2,s1,s2]T。