粒子滤波算法综述
粒子滤波原理

粒子滤波原理粒子滤波是一种基于蒙特卡洛方法的非线性、非高斯状态估计算法,它在目标跟踪、传感器定位、机器人导航等领域得到了广泛的应用。
粒子滤波的原理是基于贝叶斯滤波理论,通过一组随机粒子来表示系统的状态空间,利用这些粒子对系统状态进行估计和预测。
本文将介绍粒子滤波的基本原理和算法流程。
粒子滤波的基本原理是通过一组随机粒子来逼近系统的后验概率分布,从而实现对系统状态的估计和预测。
在每个时间步,粒子滤波算法通过重采样、预测和更新三个步骤来实现对系统状态的推断。
首先,根据系统的运动模型对当前粒子进行预测,然后根据观测数据对预测结果进行更新,最后通过重采样来调整粒子的权重,以逼近真实的后验分布。
通过不断重复这个过程,粒子的分布将逼近真实的后验分布,从而实现对系统状态的准确估计。
粒子滤波算法的流程可以简单描述为,首先初始化一组随机粒子,根据系统的运动模型对粒子进行预测,然后根据观测数据对预测结果进行更新,最后通过重采样来调整粒子的权重。
重复这个过程直到达到收敛条件,得到系统状态的估计值。
在实际应用中,粒子滤波算法可以通过增加粒子数量来提高估计的准确性,同时也可以通过适当的重采样策略来提高算法的效率。
粒子滤波算法的优点是能够处理非线性和非高斯的系统模型,并且可以灵活地适应不同的观测数据。
同时,粒子滤波算法也具有较好的实时性和适用性,能够在复杂的环境中实现对系统状态的准确估计。
然而,粒子滤波算法也存在着粒子数目难以确定、计算复杂度较高等问题,需要在实际应用中进行合理的优化和改进。
总之,粒子滤波是一种基于蒙特卡洛方法的非线性、非高斯状态估计算法,它通过一组随机粒子来逼近系统的后验概率分布,实现对系统状态的估计和预测。
粒子滤波算法具有较好的适用性和实时性,在目标跟踪、传感器定位、机器人导航等领域得到了广泛的应用。
希望本文的介绍能够帮助读者更好地理解粒子滤波的原理和算法流程,为相关领域的研究和应用提供参考。
粒子滤波算法matlab实例
一、介绍粒子滤波算法粒子滤波算法是一种基于蒙特卡洛方法的非线性、非高斯滤波算法,它通过一组随机产生的粒子来近似表示系统的后验概率分布,从而实现对非线性、非高斯系统的状态估计。
在实际应用中,粒子滤波算法被广泛应用于目标跟踪、导航、机器人定位等领域。
本文将以matlab 实例的形式介绍粒子滤波算法的基本原理和应用。
二、粒子滤波算法的原理及步骤粒子滤波算法的主要原理是基于贝叶斯滤波理论,通过一组随机产生的粒子来近似表示系统的后验概率分布。
其具体步骤如下:1. 初始化:随机生成一组粒子,对于状态变量的初始值和方差的估计,通过随机抽样得到一组粒子。
2. 预测:根据系统模型,对每个粒子进行状态预测,得到预测状态。
3. 更新:根据测量信息,对每个预测状态进行权重更新,得到更新后的状态。
4. 重采样:根据更新后的权重,对粒子进行重采样,以满足后验概率分布的表示。
5. 输出:根据重采样后的粒子,得到对系统状态的估计。
三、粒子滤波算法的matlab实例下面以一个简单的目标跟踪问题为例,介绍粒子滤波算法在matlab中的实现。
假设存在一个目标在二维空间中运动,我们需要通过一系列测量得到目标的状态。
我们初始化一组粒子来近似表示目标的状态分布。
我们根据目标的运动模型,预测每个粒子的状态。
根据测量信息,对每个预测状态进行权重更新。
根据更新后的权重,对粒子进行重采样,并输出对目标状态的估计。
在matlab中,我们可以通过编写一段简单的代码来实现粒子滤波算法。
我们需要定义目标的运动模型和测量模型,然后初始化一组粒子。
我们通过循环来进行预测、更新、重采样的步骤,最终得到目标状态的估计。
四、总结粒子滤波算法是一种非线性、非高斯滤波算法,通过一组随机产生的粒子来近似表示系统的后验概率分布。
在实际应用中,粒子滤波算法被广泛应用于目标跟踪、导航、机器人定位等领域。
本文以matlab实例的形式介绍了粒子滤波算法的基本原理和应用,并通过一个简单的目标跟踪问题,展示了粒子滤波算法在matlab中的实现过程。
粒子滤波算法综述

粒子滤波算法综述粒子滤波算法(Particle Filter),又被称为蒙特卡洛滤波算法(Monte Carlo Filter),是一种递归贝叶斯滤波方法,用于估计动态系统中的状态。
相比于传统的滤波算法,如卡尔曼滤波算法,粒子滤波算法更适用于非线性、非高斯的系统模型。
粒子滤波算法的核心思想是通过一组样本(粒子)来表示整个状态空间的分布,并通过递归地重采样和更新这些粒子来逼近真实状态的后验概率分布。
粒子滤波算法最早由Gordon等人在1993年提出,此后得到了广泛的研究和应用。
1.初始化:生成一组初始粒子,每个粒子都是状态空间中的一个假设。
2.重采样:根据先前的粒子权重,进行随机的有放回抽样,生成新的粒子集合。
3.预测:根据系统模型和控制输入,对新生成的粒子进行状态预测。
4.更新:利用观测数据和度量粒子与真实状态之间的相似度的权重函数,对预测的粒子进行权重更新。
5.标准化:对粒子权重进行标准化,以确保它们的总和为16.估计:利用粒子的权重对状态进行估计,可以使用加权平均或最大权重的粒子来表示估计值。
相对于传统的滤波算法,粒子滤波算法具有以下优势:1.粒子滤波算法能够处理非线性、非高斯的系统模型,适用性更广泛。
2.粒子滤波算法不需要假设系统模型的线性性和高斯噪声的假设,可以更准确地估计状态的后验概率分布。
3.粒子滤波算法可以处理任意复杂的系统模型,不受系统的非线性程度的限制。
然而,粒子滤波算法也存在一些缺点,如样本数的选择、计算复杂度较高、粒子退化等问题。
为了解决这些问题,研究者提出了一系列改进的算法,如重要性采样粒子滤波算法(Importance Sampling Particle Filter)、最优重采样粒子滤波算法(Optimal Resampling Particle Filter)等。
总的来说,粒子滤波算法是一种强大的非线性滤波算法,广泛应用于信号处理、机器人导航、智能交通等领域。
随着对算法的深入研究和改进,粒子滤波算法的性能和应用范围将进一步扩展。
粒子滤波算法的应用研究及优化
粒子滤波算法的应用研究及优化近年来,随着计算机技术的不断发展,人工智能等领域的应用不断扩展,各种算法也不断被提出和应用。
粒子滤波算法是一种常见的非参数滤波算法,其主要应用于状态估计和目标跟踪等领域。
在实际应用中,粒子滤波算法也存在许多问题,需要进行优化和改进。
一、粒子滤波算法的基本原理粒子滤波算法基于蒙特卡罗方法,根据现有的状态量,通过不断地提出指定数量的粒子,不断逼近滤波目标的状态。
具体算法流程如下:1. 初始化。
在搜寻状态量的范围内,随机生成一定数量的粒子(通常为1000个左右),并按照一定的分布方式进行粒子的分配。
2. 预测。
根据系统的动态模型预测每个粒子的下一个状态。
3. 权值更新。
根据每个粒子的当前状态和实际观测值,计算每个粒子的权值,并进行归一化处理。
4. 重采样。
根据每个粒子的权值,进行筛选和抽样,让具有更高权值的粒子具有更高的概率被采样。
5. 状态估计。
根据采样到的粒子状态计算滤波后的目标状态。
二、粒子滤波算法的应用研究1. 目标跟踪。
在目标跟踪中,粒子滤波算法被广泛应用。
通过将目标的位置作为特征,将粒子在搜索范围内分布,并根据目标的位置和速度对每个粒子进行预测和权值更新,从而得到目标的实时跟踪结果。
2. 机器人定位。
在机器人定位领域,粒子滤波算法也有着广泛的应用。
通过机器人的传感器,计算机器人位置的先验概率,并根据传感器获得的信息对每个粒子进行预测和更新,从而得到机器人位置的后验概率估计。
3. 海洋探索。
在海洋探索中,粒子滤波算法也有着广泛的应用。
通过探测器获取海洋中目标的信息,并将其传入计算机进行处理。
在搜寻范围内随机产生一定数量的粒子,并根据海洋环境的不同,在粒子的状态估计过程中添加不同的判据和约束条件,以得到更精确的目标跟踪结果。
三、粒子滤波算法的优化粒子滤波算法的性能受到多个因素的影响,例如粒子数、粒子初始分布、重采样方法等。
为了提高粒子滤波算法的估计精度,以下几个方面可以进行优化:1. 优化初始分布。
粒子滤波,程序
粒子滤波(Particle Filter ,PF),又称为序贯蒙特卡罗算法,是一种基于蒙特卡罗方法的贝叶斯滤波技术。
粒子滤波的基本原理是寻找一组在状态空间传播的随机粒子(样本)描述系统的状态,通过蒙特卡罗方法处理贝叶斯估计中的积分运算,从而得到系统状态的最小均方差估计。
当粒子数量区域无穷时可以逼近服从任意概率分布的系统状态。
与其他滤波技术相比,粒子滤波不需要对系统状态做任何先验性假设,原则上可以应用于任何能用状态空间模型描述的随机系统。
一、贝叶斯估计贝叶斯定理是贝叶斯估计方法的理论基础。
贝叶斯定理表达如下:(|)()(|)()f y x f x f x y f y =其中,x 为待估计参数,y 为样本观测值信息,即样本信息,f(x)是待估计参数x 的先验分布密度函数,f(x|y)是x 的后验分布密度函数,f(y)和f(y|x)是y 的密度函数。
因此通过上式可以看出,后验信息正比于样本信息与先验信息的乘积。
可以通过样本信息对先验信息进行修正来得到更准确的后验信息。
得到后验分布的密度函数后,就可以此为基础进行参数的点估计、区间轨迹和假设检验。
二、序贯重要性采样方法序贯重要性采样方法的核心思想是利用一系列随机样本的加权和所需的验后概率密度得到状态的估计值。
当样本点的数量无穷多时,蒙特卡罗特性与验后概率密度的函数表达等价,序贯重要性采样滤波器近似于贝叶斯滤波器。
对于如下的非线性系统:(1)[(),()]()[(),()]x k f x k w k z k h x k v k +==式中,f(·)和h(·)是非线性函数,w(k)和v(k)是系统的状态噪声和观测噪声。
设001[,,,]k k x x x x =为从0~k 时刻所有状态向量的集合,112[,,,]k k z z z z =为1~k时刻所有观测向量的集合。
滤波过程中利用01k k x z 和获得最优的x k+1,即1{[()]}[()][()|]()k E f x k f x k p x k z dx k =⎰一般而言,()1|kp x k z ⎡⎤⎣⎦是多变量且非高斯的很难直接采样,可以用与其近似的分布1[()|]k x k z π代替它进行采样,则1111111111[x(k)][()][()|]()[()|][()][()|]()[()|][|()][()][()][()|]()[][()|][x(k)][()][()|]()[]k k k kk kk k k kEf f x k p x k z dx k p x k z f x k x k z dx k x k z p z x k p x k f x k x k z dx k p z x k z w f x k x k z dx k p z πππππ====⎰⎰⎰⎰ 式中1[()|]k x k z π称为重要性函数,而11[|()][()][()][()|]k k p z x k p x k w x k x k z π=称为重要性权值。
粒子滤波原理

粒子滤波原理粒子滤波是一种基于蒙特卡洛方法的非线性、非高斯状态估计算法,它通过在状态空间中随机抽取一组粒子来近似表示目标系统的状态分布,从而实现对系统状态的估计和预测。
粒子滤波在目标跟踪、机器人定位、信号处理等领域有着广泛的应用,本文将介绍粒子滤波的基本原理和算法流程。
粒子滤波的基本原理是基于贝叶斯滤波理论,它通过不断地对系统状态进行采样和更新,来逼近系统的真实状态分布。
在粒子滤波中,我们通过一组随机抽取的粒子来表示系统的状态空间,每个粒子都有一个权重来表示其对系统状态的估计贡献。
通过不断地对粒子进行采样和更新,可以逐步逼近系统的真实状态分布。
粒子滤波的算法流程大致可以分为预测和更新两个步骤。
在预测步骤中,我们根据系统的动力学模型对当前的粒子进行状态预测,得到下一个时刻的状态估计。
在更新步骤中,我们根据系统的观测模型,计算每个粒子的观测概率,并根据观测值对粒子的权重进行调整,从而得到更新后的粒子集合。
通过不断地重复预测和更新步骤,可以逐步逼近系统的真实状态分布。
粒子滤波的优势在于它能够处理非线性、非高斯的系统,并且可以适用于任意维度的状态空间。
同时,由于粒子滤波是一种基于蒙特卡洛方法的近似推断算法,因此它可以灵活地处理各种复杂的状态分布,包括多峰分布和非参数分布等。
然而,粒子滤波也面临着粒子数目的选择和计算复杂度的增加等问题。
由于粒子滤波是一种基于蒙特卡洛方法的近似推断算法,因此粒子的数目会直接影响到滤波的性能。
通常情况下,粒子数目越多,滤波的性能越好,但同时也会增加计算的复杂度。
因此在实际应用中,需要根据系统的复杂度和计算资源的限制来选择合适的粒子数目。
总的来说,粒子滤波是一种非常灵活和强大的状态估计算法,它能够有效地处理各种复杂的非线性、非高斯系统,并且在目标跟踪、机器人定位、信号处理等领域有着广泛的应用前景。
通过不断地改进和优化,相信粒子滤波在未来会有更加广泛的应用和发展。
粒子滤波技术的发展现状综述
( tt K yL b r oyo Mehncl yt n irt n Sa e a oa r f c a i s m a dVba o , e t aS e i S a g a J o n nvr t,S ag a 2 0 4 ,C ia h nh i i t gU i sy h n h i 0 2 0 hn ) a o ei
nt n ii o
粒子 滤 波 ( a i eFl rP ) 术 是 一 种 用 于 Prc ie , F 技 t l t 非线 性 、 高斯 系 统 的 滤波 方 法 。在 其 发 展过 程 中 非 有 很 多 表 述 方 法 , B o t p ft ,C n est n 如 ot r l r o dnai sa i e o
障诊 断 、 参数 估计 与 系 统 辨识 、 人手 臂 运 动 识别 、 计
算 机视 觉 、 融领 域等 J 金 。
l e y等人 ¨ 提 出的基 于 贝 叶斯 采 样 估 计 的顺 序 重 要
采样 ( I) SS 滤波 思想 。6 0年代 以后 粒子 滤 波技 术 得
1 粒 子 滤 波 技 术 发 展 现 状
Absr c t a t:Th s p p rr v e h tt ft e ato atc e fl rn e h i u .Th o e t o s i a e e iws t e sae o h r fp ril t ig t c n q e i e e n v lmeh d frpa i l le i g c l u ain o u i d fp ril sa e i r d e o r ce f trn ac lto ff rk n so a tce r nto uc d.Th r b e n tr e r c i g, t i o e p o l msi a g tta k n n vg to n re t t n ae s mma ie a i ain a d o in a i r u o rz d.Atl s ,t e f rh rsu y a d p a tc la p i ainso a il a t h u t e t d n r c ia p lc to fp r ce t
粒子滤波算法综述
5 与其他非线性滤波方法的比较
随着粒子滤波方法在许多领域中的成功应用,研究人员认为在解决所 有状态估计的滤波问题时,获得滤波性能最好的方法就是粒子滤波算法 ,它甚至优于卡尔曼滤波方法。实际上,粒子滤波作为处理非线性系统 状态估计问题的方法之一,也存在着算法适应性和估计精度问题。
5 与其他非线性滤波方法的比较
m 记录样本 xk ,并将其作为新样本集中的采样,将区间[ 0, 1] i 按 i w j (i 1, 2, , n) 分成 n个小区间,当随机数 ul 落在第m个区 j 0 m 间 I m m1 时,对应样本 xk 进行复制。 在采样总数仍保持为n的情况下,权值较大的样本被多次复制,从 而实现重采样过程。显然,重采样过程是以牺牲计算量和鲁棒性来降 低粒子数匮乏现象。
(5)
蒙特卡罗方法的核心是将式( 2) 中的积分问题转化为有限样本点的概 率转移累加过程,但在实际中由于 p xk z1:k 可能是多变量、非指概率分布与 p xk z1:k 相同, 概率密度分布 q x0:k z1:k 已知且容易从中采样的分布函数,重要性 采样需要得到k 时刻以前所有的观测数据。因此实际中多采用可实现递 推估计的SIS算法。
5 与其他非线性滤波方法的比较
5.3 EKF,UKF,PF3种算法的比较 EKF和UKF都是针对非线性系统的线性卡尔曼滤波方法的变形和改 进形式,因此受到线性卡尔曼滤波算法的条件制约, 即系统状态应满足高 斯分布。表1给出了不同状态方程和观测方程的概率分布特性时的不同滤 波方法 表1 各种滤波算法的适应性范围
i i ˆ p ( xk , z1:k ) wk K h ( xk xk ) i 1 n
(15)
其中K()和h分别是满足 ˆ ˆ)= E[ [ p ( xk , z1:k ) p ( xk , z1:k )]2 dxk ] (16) p MISE( 的核密度函数和核带宽系数。
粒子滤波个人总结
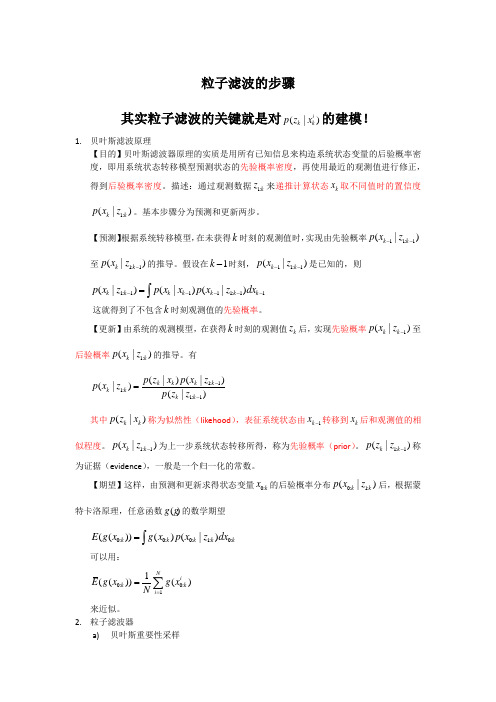
粒子滤波的步骤其实粒子滤波的关键就是对(|)i k k p z x 的建模!1. 贝叶斯滤波原理【目的】贝叶斯滤波器原理的实质是用所有已知信息来构造系统状态变量的后验概率密度,即用系统状态转移模型预测状态的先验概率密度,再使用最近的观测值进行修正,得到后验概率密度。
描述:通过观测数据1:k z 来递推计算状态k x 取不同值时的置信度1:(|)k k p x z 。
基本步骤分为预测和更新两步。
【预测】根据系统转移模型,在未获得k 时刻的观测值时,实现由先验概率11:1(|)k k p x z --至1:1(|)k k p x z -的推导。
假设在1k -时刻,11:1(|)k k p x z --是已知的,则1:1111:11(|)(|)(|)k k k k k k k p x z p x x p x z dx -----=⎰这就得到了不包含k 时刻观测值的先验概率。
【更新】由系统的观测模型,在获得k 时刻的观测值k z 后,实现先验概率1(|)k k p x z -至后验概率1:(|)k k p x z 的推导。
有1:11:1:1(|)(|)(|)(|)k k k k k k k k p z x p x z p x z p z z --=其中(|)k k p z x 称为似然性(likehood ),表征系统状态由1k x -转移到k x 后和观测值的相似程度。
1:1(|)k k p x z -为上一步系统状态转移所得,称为先验概率(prior )。
1:1(|)k k p z z -称为证据(evidence ),一般是一个归一化的常数。
【期望】这样,由预测和更新求得状态变量0:k x 的后验概率分布0:1:(|)k k p x z 后,根据蒙特卡洛原理,任意函数()g 的数学期望0:0:0:1:0:(())()(|)k k k k k E g x g x p x z dx =⎰可以用:0:0:11(())()N i k k i E g x g x N ==∑来近似。
粒子滤波算法流程
粒子滤波算法流程粒子滤波算法是一种基于贝叶斯概率理论的滤波方法,广泛应用于非线性、非高斯系统的滤波和状态估计。
在实际应用中,粒子滤波算法被广泛应用于机器人定位、目标跟踪、图像处理等领域。
下面我们就来介绍一下粒子滤波算法的流程。
1、设定初始状态在粒子滤波算法中,初始状态是非常重要的。
初始状态的好坏直接关系到滤波精度。
因此,一般先通过测量或者历史数据来估计系统的状态。
然后根据估计结果来设定初始状态。
设定好初始状态后,即可开始进行下一步操作。
2、预测状态粒子滤波算法的核心是粒子,预测状态即是用粒子来表示当前状态。
具体来说,首先需要确定粒子数目,然后再根据当前状态和运动模型,生成粒子。
这里的运动模型通常是指动态系统的状态方程。
生成好粒子后,就可以用运动模型来预测粒子的状态了。
3、计算粒子权重预测出粒子状态后,我们需要计算粒子的权重,即表示各个粒子在当前状态下的概率。
具体来说,粒子的权重需要通过测量值来计算,计算方法是根据观测方程来进行的。
观测方程通常是指与系统状态相关的测量方程,比如观测传感器。
通过测量值和观测方程,可以计算出各个粒子的权重。
4、重采样在计算粒子权重后,为了减小粒子数目对滤波效果的影响,需要进行重采样。
重采样就是根据权重,重新抽取粒子。
权重越大的粒子,被抽取的概率越大。
因此,通过重采样可以减小粒子数目的同时,提高粒子集的多样性,增强滤波性能。
5、滤波输出重采样后,就可以进行滤波输出了。
滤波输出通常是指对粒子状态进行估计或者预测。
具体来说,可以将所有粒子状态加权平均来估计当前状态,或者选取权重最大的粒子状态作为当前状态的估计值。
总结粒子滤波算法是一种基于贝叶斯概率理论的滤波方法,应用于非线性、非高斯系统的滤波和状态估计。
它的核心是粒子,通过粒子预测状态、计算权重、重采样和滤波输出等步骤,实现对系统状态的估计和预测。
在实际应用中,粒子滤波算法有着广泛的应用前景,未来随着技术的不断发展,其应用范围也将更加广泛。
粒子滤波算法研究现状与发展趋势

粒子滤波算法研究现状与发展趋势以粒子滤波算法研究现状与发展趋势为题,本文将从以下几个方面进行探讨:粒子滤波算法的概念及原理、粒子滤波算法的应用领域、粒子滤波算法的发展趋势。
一、粒子滤波算法的概念及原理粒子滤波算法是一种基于蒙特卡洛方法的非线性滤波算法,用于估计非线性系统状态的后验概率分布。
粒子滤波算法通过引入一组粒子来近似表示系统的后验分布,通过对粒子的重采样和权重更新来动态调整粒子的分布,从而实现对系统状态的估计。
二、粒子滤波算法的应用领域粒子滤波算法在估计非线性系统状态的后验概率分布方面具有广泛的应用。
例如,在机器人定位与导航、目标跟踪、信号处理、金融数据分析等领域都可以使用粒子滤波算法进行状态估计。
粒子滤波算法能够处理非线性问题,并且适用于高维状态空间的估计,因此在实际应用中具有很大的优势。
三、粒子滤波算法的发展趋势随着科技的进步和应用需求的增加,粒子滤波算法也在不断发展和改进。
未来粒子滤波算法的发展趋势主要包括以下几个方面:1. 提高算法的效率和精度:目前粒子滤波算法在处理高维状态空间时存在粒子数目爆炸和计算复杂度高的问题。
未来的研究方向将集中在如何提高算法的效率和精度,以应对更加复杂的实际应用场景。
2. 结合深度学习和粒子滤波算法:深度学习在图像识别、语音识别等领域取得了巨大的成功,但在处理时间序列数据和非线性系统时存在一定的局限性。
粒子滤波算法在这方面具有优势,因此未来的研究方向将探索如何将深度学习与粒子滤波算法相结合,以实现更好的状态估计效果。
3. 发展适用于分布式系统的粒子滤波算法:随着物联网和分布式计算的快速发展,越来越多的系统变得分布式和并行化。
因此,未来的研究方向将致力于开发适用于分布式系统的粒子滤波算法,以提高系统状态估计的效率和准确性。
4. 拓宽粒子滤波算法的应用领域:目前粒子滤波算法已经在机器人定位与导航、目标跟踪等领域得到了广泛应用,但在其他领域的应用还比较有限。
未来的研究方向将探索如何将粒子滤波算法应用于更多的领域,如智能交通、自动驾驶、医疗健康等,以满足不同领域对状态估计的需求。
粒子滤波原理及其应用
粒子滤波原理及其应用粒子滤波是一种基于蒙特卡洛方法的非线性、非高斯状态估计技术,它在目标跟踪、机器人定位、图像处理等领域有着广泛的应用。
本文将介绍粒子滤波的基本原理及其在实际应用中的一些案例。
粒子滤波的基本原理是通过一组随机样本(粒子)来逼近目标的后验概率分布,从而实现对目标状态的估计。
在每次迭代中,粒子根据系统动力学模型进行预测,然后根据观测数据进行权重更新,最终通过重采样得到下一时刻的粒子集合。
通过不断迭代,粒子的分布将逼近真实的后验概率分布,从而实现对目标状态的估计。
粒子滤波的应用非常广泛,其中最典型的应用之一就是目标跟踪。
在目标跟踪中,目标的状态通常是非线性、非高斯的,传统的卡尔曼滤波等线性滤波方法往往无法很好地处理这种情况。
而粒子滤波通过对目标状态的随机样本进行估计,能够更好地适应目标状态的非线性、非高斯特性,因此在目标跟踪中有着很好的效果。
除了目标跟踪,粒子滤波还在机器人定位、图像处理等领域有着广泛的应用。
在机器人定位中,机器人通常需要根据传感器数据来估计自身的位置,而传感器数据往往存在噪声,因此对机器人位置进行准确估计是一个挑战。
粒子滤波通过对机器人位置的随机样本进行估计,能够更好地处理传感器数据的噪声,从而实现对机器人位置的准确估计。
在图像处理中,粒子滤波也被广泛应用于目标跟踪、目标识别等任务。
通过对目标状态的随机样本进行估计,粒子滤波能够更好地适应目标状态的变化,从而实现对目标的准确跟踪和识别。
总之,粒子滤波作为一种非线性、非高斯状态估计技术,具有广泛的应用前景。
通过对目标状态的随机样本进行估计,粒子滤波能够更好地适应目标状态的非线性、非高斯特性,因此在目标跟踪、机器人定位、图像处理等领域有着广泛的应用前景。
希望本文的介绍能够帮助读者更好地了解粒子滤波的原理及其应用,从而为相关领域的研究和应用提供一定的参考价值。
粒子滤波跟踪算法简介PPT

粒子滤波在物体跟踪中的应用示例
粒子滤波在机器人自定位中的应用示例
谢谢! Code is available
什么是粒子滤波
xk f ( xk 1 ) wk yk h( xk ) vk
粒子滤波算法
1)初始化所有粒子 2)更新粒子当前位置 3)评估每个粒子的重要性 4)根据粒子重要性重新采样
粒子滤波缺点
虽然粒子滤波算法可以作为解决SLAM问题的有效手 段,但是该算法仍然存在着一些问题。其中最主要的 问题是需要用大量的样本数量才能很好地近似系统的 后验概率密度。机器人面临的环境越复杂,描述后验 概率分布所需要的样本数量就越多,算法的复杂度就 越高。因此,能够有效地减少样本数量的自适应采样 策略是该算法的重点。另外,重采样阶段会造成样本 有效性和多样性的损失,导致样本贫化现象。如何保 持粒子的有效性和多样性,克服样本贫化,也是该算 法研究重点。
粒子滤波跟踪算法简介
什么是粒子滤波
粒子滤波(PFrlo methods),它是利用粒子集来表 示概率,可以用在任何形式的状态空间模型上。其核 心思想是通过从后验概率中抽取的随机状态粒子来表 达其分布,是一种顺序重要性采样法(Sequential Importance Sampling)。
粒子滤波原理及应用matlab仿真

粒子滤波原理及应用matlab仿真一、引言粒子滤波(Particle Filter)是贝叶斯滤波(Bayesian Filter)的一种扩展,用于解决非线性和非高斯问题。
它是一种基于蒙特卡罗方法的状态估计算法,可以用于目标跟踪、机器人定位、信号处理等领域。
本文将详细介绍粒子滤波的原理及其在matlab中的应用。
二、贝叶斯滤波贝叶斯滤波是一种基于贝叶斯定理的概率推断方法,用于估计状态变量在给定观测值下的后验概率分布。
其核心思想是将先验概率分布和观测数据结合起来,得到后验概率分布。
具体地,在时间步k时刻,假设状态变量为x(k),观测变量为y(k),则根据贝叶斯定理:P(x(k)|y(1:k)) = P(y(k)|x(k)) * P(x(k)|y(1:k-1)) / P(y(k)|y(1:k-1))其中,P(x(k)|y(1:k))表示在已知前k个观测值下x(k)的后验概率分布;P(y(k)|x(k))表示在已知x(k)时y(k)的条件概率分布,也称为似然函数;P(x(k)|y(1:k-1))表示在已知前k-1个观测值下x(k)的先验概率分布;P(y(k)|y(1:k-1))表示前k-1个观测值的边缘概率分布。
三、粒子滤波基本原理粒子滤波是一种基于贝叶斯滤波的蒙特卡罗方法,它通过在状态空间中随机采样一组粒子来近似表示后验概率分布。
每个粒子都代表一个可能的状态变量,其权重反映了该状态变量与观测值之间的匹配程度。
具体地,在时间步k时刻,假设有N个粒子{ x(1), x(2), ..., x(N) },则每个粒子都有一个对应的权重w(i),且满足:∑ w(i) = 1根据贝叶斯定理可得:P(x(k)|y(1:k)) = P(y(k)|x(k)) * P(x(k)|y(1:k-1)) / P(y(k)|y(1:k-1))其中,P(y(k)|x(k))和P(x(k)|y(1:k-1))可以通过系统模型和观测模型计算得到。
粒子数动态调整的粒子滤波新算法

粒子数动态调整的粒子滤波新算法
粒子滤波(Particle Filter)是一种基于贝叶斯滤波的随机游走算法,用于处理非线性、非高斯的状态估计问题。
然而,粒子滤波需要大量
的粒子数量才能获得较好的估计结果,而且随着时间的推移,粒子数量会
逐渐增加,导致计算时间和存储空间的急剧增加。
为了解决这个问题,近年来出现了一些粒子数动态调整的粒子滤波新
算法,可以根据实时观测数据的不同情况,自适应地调整粒子数,从而在
保证估计精度的同时,减少计算时间和存储空间的开销。
这些算法主要包
括以下几类:
1.基于采样思想的粒子滤波算法:这类算法主要考虑粒子增减的策略,通过对采样粒子的质量和分布进行评估,实现粒子数量的动态调整。
2.基于注意力机制的粒子滤波算法:这类算法利用注意力机制来识别
关键的观测数据,从而减少不必要的粒子数量,提高计算效率。
3.基于机器学习的粒子滤波算法:这类算法利用机器学习技术来学习
不同观测数据下的粒子数量,实现自适应的粒子数调整。
总的来说,粒子数动态调整的粒子滤波算法是一种非常有效的方法,
可以在保证估计精度的同时,提高计算效率和存储效率,具有很广泛的应
用前景。
粒子滤波算法简介与matlab程序
粒子滤波作者-niewei120——nuaaBayes法则:贝叶斯定理由英国数学家贝叶斯( Thomas Bayes 1702-1763 ) 发展,用来描述两个条件概率之间的关系,比如P(A|B) 和P(B|A)。
按照乘法法则:P(A∩B)=P(A)*P(B|A)=P(B)*P(A|B),可以立刻导出贝叶斯定理公式:P(A|B)=P(B|A)*P(A)/P(B)。
通常,事件A在事件B(发生)的条件下的概率,与事件B在事件A的条件下的概率是不一样的;然而,这两者是有确定的关系,贝叶斯法则就是这种关系的陈述。
Pr(A)是A的先验概率或边缘概率。
之所以称为"先验"是因为它不考虑任何B方面的因素。
Pr(A|B)是已知B发生后A的条件概率,也由于得自B的取值而被称作A的后验概率。
Pr(B|A)是已知A发生后B的条件概率,也由于得自A的取值而被称作B的后验概率。
Pr(B)是B的先验概率或边缘概率,也作标准化常量(normalized constant)。
先验概率的计算比较简单,没有使用贝叶斯公式;而后验概率的计算,要使用贝叶斯公式。
若用Pr(B|A)/Pr(B)表示标准似然度,则后验概率= 标准似然度* 先验概率。
例子:一座别墅在过去的20 年里一共发生过 2 次被盗,别墅的主人有一条狗,狗平均每周晚上叫 3 次,在盗贼入侵时狗叫的概率被估计为0.9,问题是:在狗叫的时候发生入侵的概率是多少?我们假设A 事件为狗在晚上叫,B 为盗贼入侵,则P(A) = 3 / 7,P(B)=2/(20·365)=2/7300,P(A | B) = 0.9,按照公式很容易得出结果:P(B|A)=0.9*(2/7300)/(3/7)=0.00058贝叶斯决策理论方法基本思想是:1、已知类条件概率密度参数表达式和先验概率。
2、利用贝叶斯公式转换成后验概率。
3、根据后验概率大小进行决策分类。
贝叶斯滤波的核心思想就是利用已知的信息来判断状态变量的后验概率,在目标跟踪中也就是对所有观测值Z1:Zk={Z1,Z2…Zk}已知的情况下,计算出后验概率P(Xk|Z1:k),其计算的方法具体分为预测和更新。
智能优化粒子滤波算法综述研究
智能优化粒子滤波算法综述研究智能优化粒子滤波算法,简称IO-PF,是一种新型的滤波算法,其主要应用于非线性、非高斯和多模式系统的机器学习任务中。
智能优化粒子滤波算法是以贝叶斯滤波为基础的一种非线性滤波方法,是目前最先进的粒子滤波算法之一。
本文就智能优化粒子滤波算法的原理、方法、研究进展和应用等方面作一综述。
智能优化粒子滤波算法主要是运用了第二代智能优化算法,利用粒子群算法等的协同演化特性,对粒子状态估计值进行调整。
其中,“粒子”指通过贝叶斯滤波器,结合先验信息与观测值,对被测量目标状态进行估计得到一个概率分布,而“智能优化”指通过优化算法对这些粒子状态进行动态调整以达到更好的滤波效果。
智能优化粒子滤波算法主要分成两步,第一步是计算粒子权重,第二步是利用粒子权重调整粒子状态,得到目标状态估计值。
(1)计算粒子权重计算粒子权重时,首先需要根据观测状态信息,计算每个粒子代表的状态与观测状态之间的差距,这个差距通常采用似然函数或卡方检验来度量。
在此基础上,再计算每个粒子的权重,通常采用贝叶斯公式来计算粒子的后验概率。
(2)粒子状态调整在计算出每个粒子的权重后,还需要对这些粒子状态进行调整以得到更好的估计值。
这个调整通常采用智能优化算法,如粒子群算法等,对粒子权重进行协同演化来实现粒子状态的调整。
近年来,受到智能优化算法的迅速发展和贝叶斯滤波的广泛应用,智能优化粒子滤波算法也得到了快速发展。
下面列举几篇相关的研究成果:(1)《一种基于贝叶斯滤波的智能优化粒子滤波算法》该论文提出了一种基于贝叶斯滤波的智能优化粒子滤波算法,并将其应用于机器视觉任务中。
实验结果表明,该算法相比传统的粒子滤波算法在估计精度和计算效率上有了显著的提升。
(2)《基于改进粒子群算法的非线性多传感器系统智能优化粒子滤波》该论文提出了一种基于改进粒子群算法的智能优化粒子滤波算法,进一步提高了算法的鲁棒性和实时性,适用于非线性多传感器系统的机器学习任务。
粒子滤波技术的发展现状综述
1收稿日期:2009-06-10基金项目:国家自然科学基金项目10872125、上海市自然科学基金项目06ZR14042、高等学校学科创新引智计划资助项目B06012、教育部留学回国人员科研启动基金项目作者简介:张瑞华(1985-),女,硕士,目前从事非线性动力学、信号处理与识别研究。
E m ai:lzhangrh @s j tu 文章编号:1006 1355(2010)02 0001 04粒子滤波技术的发展现状综述张瑞华,雷 敏(上海交通大学机械系统与振动国家重点实验室,上海 200240)摘 要:对粒子滤技术的近几年研究发展进行回顾,介绍四大类粒子滤波改进算法,总结目前目标跟踪、导航与定位中存在的问题,展望粒子滤波技术的方法研究及实际应用前景。
关键词:振动与波;粒子滤波;非线性系统;信号处理;目标识别中图分类号:TP27;TN 713;V 2 文献标识码:ADO I 编码:10.3969/.j issn .1006-1355.2010.02.001Review of State of The A rt of Particle Filtering TechniqueZHANG Rui hua,LEI M in(S tate Key Laboratory ofM echanical Syste m and V ibration ,Shangha i Jiao tong Un i v ersity ,Shangha i 200240,China)Abstract :Th is paper rev ie w s the state of the art of particle filtering techn i q ue .The novelm ethods for particle filtering ca lculati o n o f four k i n ds of particles are i n troduced .The prob l e m s i n tar get track i n g ,nav i g ation and orientation are summ ar ized.A t las,t t h e further study and practica l app li c ations of particle filtering techn ique are prospected .Key w ords :v i b ra ti o n and wave ;particle filtering ;nonlinear syste m s ;si g na l pr ocess ;target recog niti o n粒子滤波(Partic le Filter ,PF )技术是一种用于非线性、非高斯系统的滤波方法。
关于粒子滤波算法的形象比喻概要

本文来自/yangyangcv/archive/2010/05/23/1742263.html一直都觉得粒子滤波是个挺牛的东西,每次试图看文献都被复杂的数学符号搞得看不下去。
一个偶然的机会发现了Rob Hess(/~hess/实现的这个粒子滤波。
从代码入手,一下子就明白了粒子滤波的原理。
根据维基百科上对粒子滤波的介绍(/wiki/Particle_filter,粒子滤波其实有很多变种,Rob Hess实现的这种应该是最基本的一种,Sampling Importance Resampling (SIR,根据重要性重采样。
下面是我对粒子滤波实现物体跟踪的算法原理的粗浅理解:1)初始化阶段-提取跟踪目标特征该阶段要人工指定跟踪目标,程序计算跟踪目标的特征,比如可以采用目标的颜色特征。
具体到Rob 的直方图,即为目标的特征。
直方图可以用一个向量来表示,所以目标特征就是一个N*1的向量V 。
2)搜索阶段-放狗好,我们已经掌握了目标的特征,下面放出很多条狗,去搜索目标对象,这里的狗就是粒子particle 。
狗有很多种放法。
比如,a 均匀的放:即在整个图像平面均匀的撒粒子(uniform distribution;b 在上一帧得到的目标附近按照高斯分布来放,可以理解成,靠近目标的地方多放,远离目标的地方少放。
Rob Hess的代码用的是后一种方法。
狗放出去后,每条狗怎么搜索目标呢?就是按照初始化阶段得到的目标特征(色调直方图,向量V 。
每条狗计算它所处的位置处图像的颜色特征,得到一个色调直方图,向量Vi ,计算该直方图与目标直方图的相似性。
相似性有多种度量,最简单的一种是计算sum(abs(Vi-V.每条狗算出相似度后再做一次归一化,使得所有的狗得到的相似度加起来等于1.3)决策阶段我们放出去的一条条聪明的狗向我们发回报告,“一号狗处图像与目标的相似度是0.3”,“二号狗处图像与目标的相似度是0.02”,“三号狗处图像与目标的相似度是0.0003”,“N号狗处图像与目标的相似度是0.013”...那么目标究竟最可能在哪里呢?我们做次加权平均吧。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
w ik = w ik
式( 2) ~ ( 4) 描述了最优贝叶斯估计的基本思 想 , 但式 ( 2) 中的积分项仅对某些动态系统获得解 析解[ 10] , 对于非高斯非线性系统 , 由于 SIS 方法受到 计算量的制约 , 始终没有较好的解决办法. 2. 2 SIS 算法 基于随机采样运算的蒙特卡罗方法可将积分运 算转化为有限样本点的求和运算 , 即状态概率密度 分布可用如下经验概率分布近似表述 : d 1 xi ( dx 0: k) , p ( x 0∶ kû z 1: k ) = N ∑D 0: k i= 1
收稿日期 : 2004-05- 13; 修回日期 : 2004- 07-12.
[ 1] [ 6] [ 5]
法的基础 . 粒子滤波是指 : 通过寻找一组在状态空间中传 播的随机样本对概率密度函数 p ( x k û z k) 进行近似 ,
以样本均值代替积分运算 , 从而获得状态最小方差
估计的过程, 这些样本即称为“ 粒子” . 采用数学语言 描述如下 : 对于平稳的随机过程金项目 ( 60375008) ; 中国博士后科学基金 项目 ( 2003034265) ; 上海市博士后基金项目 ( SH0325) ; 河北省博士基金项目 ( B2004510) . 作者简介 : 胡士强 ( 1969— ) , 男 , 河北定州人 , 教授 , 博士后 , 从事非线 性滤波、 图像理解等研究 ; 敬忠良 ( 1960— ) , 男 , 四川南 部人 , 教授 , 博士生导师 , 从事信息融合、 随机运动控制等研究 .
第 20 卷 第 4 期
Vol. 20 No. 4
控 制 与 决 策
Control and Decision
2005 年 4 月
Apr . 2005
文章编号 : 1001-0920( 2005) 04-0361-05
粒子滤波算法综述
胡士强 , 敬忠良
1, 2 1
( 1. 上海交通大学 自动化系 , 上海 200030; 2. 河北科技大学 自动化系 , 湖北 石 家庄 050054) 摘 要 : 对粒子滤波算法的 原理和应用进行综 述 . 首先针对 非线性非高斯 系统的状态 滤波问题 , 阐述粒 子滤波的原 理 ; 然后在分析采样 - 重要性 -重采样算法基础上 , 讨论粒子滤波算 法存在的主要问题 和改进手段 ; 最后从概率密度函 数的角度出发 , 将粒子滤波方 法与其他非线性滤波算法进行比较 , 阐明了粒子滤波 的适应性 , 给出了粒子滤波在一些 研究领域中的应用 , 并展望了 其未来发展方向 . 关键词 : 粒子滤波 ; 概率密度 ; 非线性 滤波 ; 算法 中图分类号 : T P14 文献标识码 : A
( 5)
3. 1 重要性函数选择 选取重要性函数的准则是使重要性权重的方差 最 小 . Liu 等
[ 12]
其中 p ( x k û z 1: k) 表示 Z 观测序列下 x 的概率密度 . 蒙 特卡罗方法的核心是将式( 2) 中的积分问题转化为 有限样本点的概率转移累加过程 , 但在实际中由于 p ( x kû z 1: k ) 可能是多变量、 非标准概率分布 , 通常需 要借助一些采样性算法 . 重要性函数是指概率分布 与 p ( x kû z 1: k ) 相同, 概率密度分布 q( x 0: k û z 1: k) 已知 且容易从中采样的分布函数, 重要性采样需要得到 k 时刻以前所有的观测数据 . 因此实际中多采用可 实现递推估计的 SIS 算法. 若将重要性函数 q( x 0: kû z 1: k ) 写成如下连乘积 形式:
N
∑w .
j k j= 1
( 11)
5) 利用式( 9) 对 p ( x kû z 1: k) 进行估计 .
3 粒子滤波算法存在的主要问题
对于 SIS 算法而言, 粒子数匮乏是其主要缺陷 .
[ 11]
粒子数匮乏是指随着迭代次数增加, 粒子丧失多样
性的现象 . Doucet 从理论上证明了 SIS 算法出现 粒子数匮乏现象的必然性 . 降低该现象影响的最有 效方法是选择重要性函数和采用重采样方法 .
统的后验概率密度为 p ( x k- 1 û z k- 1 ) , 依据一定原则
选取 n 个随机样本点 , k 时刻获得测量信息后, 经过
状态和时间更新过程, n 个粒子的后验概率密度可 近似为 p ( x kû z k ) . 随着粒子数目的增加 , 粒子的概率
密度函数逐渐逼近状态的概率密度函数 , 粒子滤波
p ( zk û x k) p ( x kû x k- 1 ) . q( x k û x 0: k- 1, z 1: k)
i N
( 7)
由概率密度 p ( x k- 1 û z 1: k- 1) , 利用重采样方法可得 N 个随机样本点{ x k- 1}i = 1 , 则概率密度函数可表示为
N
p ( x k- 1û z 1: k- 1 ) = 更新概率密度函数为
362
控 制 与 决 策 wk = p ( z 1: kû x 0: k ) p ( x 0: k) = q ( x kû x 0: k- 1 , z 1: k) q ( x 0: k- 1û z 1: k ) w k1
第 20 卷
估计即达到了最优贝叶斯估计的效果 [ 4] . 粒子滤波算法摆脱了解决非线性滤波问题时随 机量必须满足高斯分布的制约条件, 并在一定程度 上解决了粒子数样本匮乏问题 , 因此近年来该算法 在许多领域得到成功应用. 目前已有许多会议和讨 论组都将粒子滤波作为专题进行深入讨论和学术交 流[ 7~ 9] .
∑w
i= 1 N
i k- 1
D ( x k- 1 - x k- 1 ) ; ( 8)
i
2 基本粒子滤波算法
2. 1 最优贝叶斯估计 假定动态时变系统描述如下 : x k = f k( x k- 1 , vk- 1 ) , z k = h k( x k , nk) . ( 1)
p ( x kû z 1: k ) ≈ 其中 w k = w ki N i i 1
1 引 言
近年来, 科研人员在机动目标跟踪、 信号传输与 压缩、 金融领域数据分析、 图像处理等方面提出许多 [ 1~4] 非线性滤波新方法 , 这些算法都是基于贝叶斯 采 样 估 计 的 顺 序 重 要 采 样 ( SIS ) 滤 波 思 想. Hammersley 等在 20 世纪 50 年代末就提出了基本 的 SIS 方法 , 并在 60 年代 使其得到了进 一步发 展 , 但上述研究始终未能解决粒子数匮乏现象和 计算量制约等问题, 因此未引 起人们的重视. 直到 1993 年由 Gordon 等 提出了一种新的基于 SIS 的 Boot st rap 非线性滤波方法 , 从而奠定了粒子滤波算
n
状态更新方程为 p ( z kû x k ) p ( x kû z 1: k- 1 ) . p ( x kû z 1: k ) = p ( zk û z 1: k- 1) 其中 p ( zk û z 1: k- 1) = p(z û x )p(x û z ∫
k k k 1: k- 1
( 3)
) dx k . ( 4)
i
( 10)
N
) p ( x k- 1û z 1: k- 1) d x k- 1;
( 2)
样本点{x k }i = 1 可由 k - 1 时刻的样本点 {sk- 1 }i = 1 通 过式 ( 1) 获得 . SIS 方法的实现步骤如下 : 1) 从 q( x k û x k- 1, z k ) 中随机抽取 n 个有限样本 ; 2) 逐点计算对应的 p ( x kû x k- 1) 和 p ( z kû xk ) ; 3) 利用式 ( 10) 计算对应样本的重要性权系数 ; 4) 对权进行归一化处理 , 即
3. 2 重 采 样 重采样算法是降低粒子匮乏现象的 另一种方
法, 其思想是通过对粒子和相应权表示的概率密度
函数重新采样, 增加权值较大的粒子数 . 最常用的重 采样方法是随机采样方法 [ 14] . 其过程是 : 首先产生 n 个在 [ 0, 1] 上均匀 分布的 随机数 {Ll : l = 1, 2, … , n }, 然后通过搜索算法找到满足以下条件的整数 m, 使得 ~ j < Ll ≤ ~j. ∑w ∑w
∑w D( x
i k i= 1
k
- x ik) .
( 9)
若 已知 状态 的初 始概 率 密度 函数 为 p ( x 0û z 0) = p ( x 0) , 则状态预测方程为 p ( x kû z 1: k- 1) = p(x û x ∫
k k- 1
p ( z kû x ik) p ( x ikû x ik- 1 ) i i , q( x k û x k- 1, z k )
k
证明 了最 优重 要性 函数 为
q ( x kû x 0: k- 1 , z 1: k) = p ( x k û x 0: k- 1, z 1: k) . 但采 用最 优
重要性函数需要从 p ( x k û x 0: k- 1, z 1: k ) 采样并计算积 [ 1, 13] 分. 从应用角度看 , 多数重要性函数都采用次优 算法容易实现的 q ( x kû x 0: k- 1 , z 1: k) = p ( x kû x k- 1 ) .
Over view of par ticle f ilt er algor ithm
H U S hi - qiang 1, 2, J IN G Zhong - l iang 1
( 1. Depar tment of Automation, Shanghai Jiaotong Universit y, Sha nghai 200030, China; 2. Depart ment of Automation, Hebei University of Science and Technology, Shijiazhuang 050054, China . Corr espondent: HU Shiqiang , E - mail : sqhu @ mail . sjtu . edu . cn ) Abstr act : The Algor ithm a nd applica tions related to part icle filter ar e surveyed. Aiming at the nonlinear / nonGaussian filter pr oblem , the gener ic ideas of par ticle filt er ar e given, based on the a nalysis of st andar d algorithm of sam pling -impor tance-r esa mpling filter , the pr oblems of par ticle filter are discussed and some improvement met hods are illustrat ed. F rom view of pr obabilit y density function , the com par isons between part icle filter and other s non linear filter algor ithms and applicability ar e int roduced, some applications in t he developed ar eas ar e r eviewed, Finally, fur ther r esearch dir ect ions ar e pointed out. Key wor ds : par ticle filter ; probabilit y density; non -linear filt er; algor ithm