4HZB―2A花生摘果机的设计与试验
4HZ_2型自走式花生联合收获机的设计研究

7 3
8 9
2
1
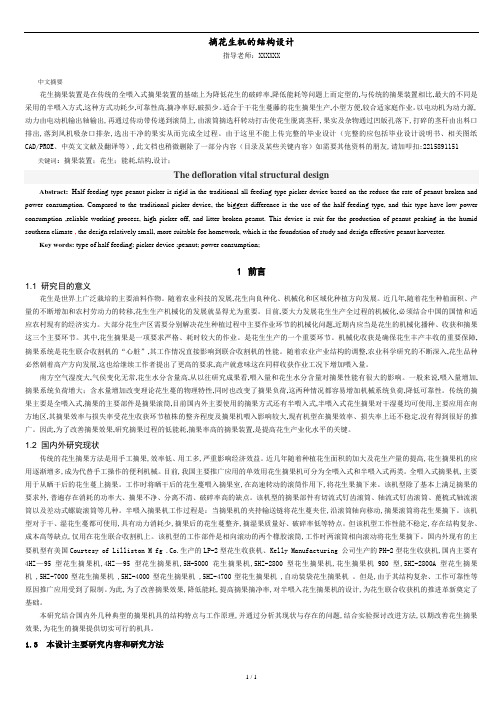
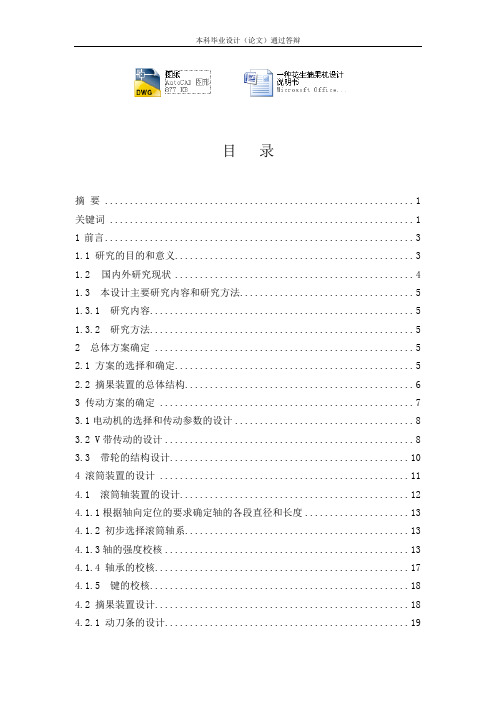
1.行走底盘 2.挖掘落土装置 3.输送装置 4.操纵装置 5.集果箱 6.提升机 7.摘果机 8.风机 9.筛选机 图 1 4HZ-2 型自走式花生联合收获机结构简图 Fig.1 Model 4HZ-2 self-propelled peanut combine harvester structure diagram
由于种植制度的不同, 国外多采用两段式收 获 方 法 , 其 中 美 国 John Deere 公 司 和 Kelley Manufacturing 公司研制生产的花生分段收获机械
收稿日期:2014-12-25 修回日期:2015-2-12
代表了世界最先进水平。 中国花生机械化收获水 平在 30%左右, 花生联合收获机械可以一次性完 成挖掘、抖土、输送、摘果、清选、装袋(箱)多项作 业过程,目前,部分产品已经定型生产,并有两种 联合收获机进入国家农机支持和购置补贴目录。 但从整体上看中国大部分地区花生收获是以人工 收获和机械化挖掘收获为主, 花生联合收获机仅 在局部地区进行了试验示范和推广[4-5]。 为此,我们 在充分认知有关花生收获机械行业技术规范的基 础上,总结了前期研制完成的 4HB-2 型背负式花 生 联合收果机 的成果经验 ,认真研究 了 “4HQL-2 型全喂入花生联合收获机” 等机型的行走系统、 “4HJL-2 型花生捡拾摘果联合收获机” 等机型的 摘果装置, 并进行优化设计和试验分析, 研制了 4HZ-2 型自走式花生联合收获机。
4HZ-2 型 自 走 式 花 生 联 合 收 获 机 采 用 V 带 传动、链传动以及齿轮传动等传动型式,以满足该 机收获作业质量为设计依据, 将动力进行合理分
配, 保证各个部件装置正常运转并具有较高的传 动效率,使行走速度、输送速度、摘果绞龙转速、提 升运料速度之间协调合理。 该机动力从柴油机输 出后,经中间传动轴分为两大部分,一路为底盘行 走系统提供动力, 另一路为收获作业系统提供动 力。 具体传动系统配置见图 2。
花生摘果机的结构设计.doc
摘花生机的结构设计指导老师:XXXXXX中文摘要花生摘果装置是在传统的全喂入式摘果装置的基础上为降低花生的破碎率,降低能耗等问题上而定型的,与传统的摘果装置相比,最大的不同是采用的半喂入方式,这种方式功耗少,可靠性高,摘净率好,破损少。
适合于干花生蔓藤的花生摘果生产,小型方便,较合适家庭作业。
以电动机为动力源,动力由电动机输出轴输出,再通过传动带传递到滚筒上,由滚筒摘选杆转动打击使花生脱离茎杆,果实及杂物通过凹版孔落下,打碎的茎秆由出料口排出,落到风机吸杂口排杂,选出干净的果实从而完成全过程。
由于这里不能上传完整的毕业设计(完整的应包括毕业设计说明书、相关图纸CAD/PROE、中英文文献及翻译等),此文档也稍微删除了一部分内容(目录及某些关键内容)如需要其他资料的朋友,请加叩扣:2215891151 关键词:摘果装置;花生;能耗,结构,设计;The defloration vital structural designAbstract:Half feeding type peanut picker is rigid in the traditional all feeding type picker device based on the reduce the rate of peanut broken and power consumption. Compared to the traditional picker device, the biggest difference is the use of the half feeding type, and this type have low power consumption ,reliable working process, high picker off, and litter broken peanut. This device is suit for the production of peanut peaking in the humid southern climate , the design relatively small, more suitable foe homework, which is the foundation of study and design effective peanut harvester.Key words:type of half feeding; picker device ;peanut; power consumption;1前言1.1 研究目的意义花生是世界上广泛栽培的主要油料作物。
花生摘果机械化技术分析和研究
农 机 使 用 与 维 修
2 l
花 生 摘 果 机 械 化 技 术 分 析 和 研 究
河 北省 唐 山市农牧 局ห้องสมุดไป่ตู้ 朱建 民
摘 要 花生摘果机械化技术是运 用花 生摘 果机将花 生果从 茎蔓上摘下并对 蔓、 果进行 分 离和 清选的一种农机 化
生 产技 术 , 是 当前 和 今后 一段 时 期 我 国广 泛 推 广 运 用 的 花 生 分 段 机 械 化 生产 技 术 的 重 要 部 分 。 本 文 从 技 术 准 备 、 机 具操作 、 安 全 生 产 三 方 面 对 其 进 行 分 析 和 研 究。 关键词 花 生摘 果 机 械 化 技 术 技 术 准备 机 具 操作 安 全 生 产 分 析 研 究
一
、
超过 5~6 h 。
2 . 机 具准 备 。按照 说 明 书进 行 安装 挂 接 摘 果 机 。 彻底 清 理机 具 外 部 , 对 其 进 行 全 面 的检 查 调 整 , 使 其 处 于 良好 的技 术 状 态 。一 是 机 具 调 整 。根 据摘 果 机 工作 状 态和 花生 出果情 况 , 综 合 考究 花生 品 种 、 湿度、 茎蔓 长 短 等 因 素 , 对滚 筒转速 、 滚筒 间隙 进行调 整。 ( 1 ) 滚 筒转 速 调整 : 拖拉 机作 动 力 , 转 速通 过 拖拉 机 油 门控 制 , 调节 范 围较大 , 调 节 方便 灵 活 , 根 据经 验 进 行 灵 活 调整 。 滚 筒 转 速 高 , 脱净 率高 , 破碎 率高 , 耗 能 大; 转速 低 , 脱净 率低 , 破碎 率低 , 耗 能小 。( 2 ) 滚筒 问 隙调整 : 滚 筒 间 隙 指 滚 筒 与 凹版 筛 之 间 空 隙 。 间 隙 大, 脱 净率 低 , 破碎 率低 ; 问隙小 , 脱 净率 高 , 破 碎 率 高 。调 整 时 , 以脱得 干净 为前 提 , 尽 量 采 用大 间 隙 , 这 样 既 可得 到 良好 的脱 粒 质 量 , 又 能提 高生 产 率 , 降 低 能耗 , 防止 滚筒 堵塞 。二 是 机具 检 查 。检 查 各 紧 固部 位是 否牢 固 , 皮 带 轮 是 否牢 固 , 有无松脱现象 ; 滚筒 、 机架 、 分离筛等 有无变形 、 开焊 、 开裂情况 ; 各传动部 位 是 否转 动 灵 活 , 用 手 转 动皮 带 轮 、 齿轮 轴 , 是 否 平 稳, 有 无碰撞 摩 擦 现 象 ; 万 向节 十字 架 、 摆 环箱 、 轴 承 等处润滑情况 ; 各传动部位 三角带张紧度是否合适 ; 各转 动部件 是 否安装 防 护罩 , 喂 人 口是 否 有 安 全 防护 罩, 喂 人板 上是 否有 安全 警告 标志 。 3 . 其他准备 。摘果作业前 , 将要摘果 的花生人工 抖( 去) 土后 成 条 铺 放 , 花 生 果 向 阳光 , 晾 晒 2~ 3天 , 使花生茎蔓湿度适宜 ; 选择平整 、 开阔且交通方便 的 场地 , 将 花 生就 近堆成 堆 , 堆 与 堆 之 间 距 离 掌 握 在 2 0 m左 右 , 以方便 机具 移 动和摘 果 作 业 。摘 果 机摆 放
4HJL_2型花生联合收获机摘果机构的设计与试验_王东伟
1 总体结构与工作原理
1.1 总体结构 花生联合收获螺旋圆弧面板摘果机构主要由
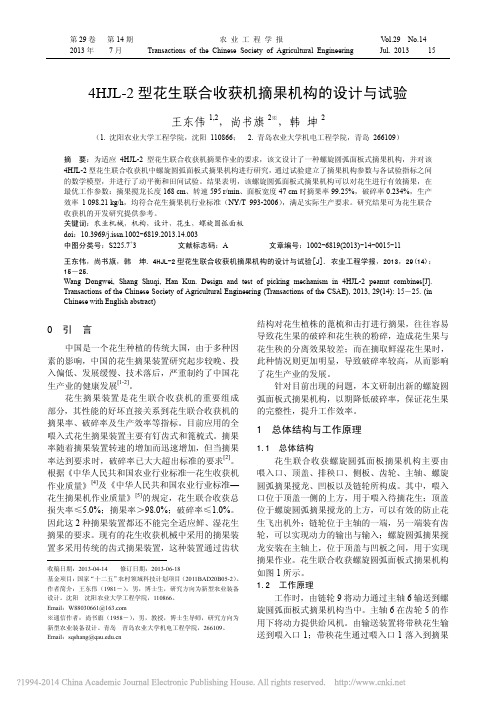
喂入口、顶盖、排秧口、侧板、齿轮、主轴、螺旋 圆弧摘果搅龙、凹板以及链轮所构成。其中,喂入 口位于顶盖一侧的上方,用于喂入待摘花生;顶盖 位于螺旋圆弧摘果搅龙的上方,可以有效的防止花 生飞出机外;链轮位于主轴的一端,另一端装有齿 轮,可以实现动力的输出与输入;螺旋圆弧摘果搅 龙安装在主轴上,位于顶盖与凹板之间,用于实现 摘果作业。花生联合收获螺旋圆弧面板式摘果机构 如图 1 所示。 1.2 工作原理
度等条件决定,根据经验及相关试验,取其直径为
410~510 mm。
第 14 期
王东伟等:4HJL-2 型花生联合收获机摘果机构的设计与试验
17
2.2 螺旋圆弧摘果搅龙转速的确定
螺旋圆弧摘果搅龙的转速直接决定着花生的摘
果率以及花生破碎率的大小。转速越高,摘果率就会
越高,但破碎率也会随之而上升;当摘果辊筒转速较
图 1 花生联合收获螺旋圆弧面板式摘果机构
Fig.1 Plucking Peanut of surface pylori mechanism in harvester
项目 Item
参数 Parameters
移动式花生摘果机的设计与试验研究

移动式花生摘果机的设计与试验研究于健东,刘艳芬,王东伟(青岛农业大学机电工程学院,山东青岛266109)摘要:目前,我国大部分花生摘果机存在荚果损伤严重、摘净率低、秸秆过碎不易清选等问题,且整体结构和传动系统较为复杂,制造成本高,严重制约着花生生产的可持续发展。
针对这一突出问题,研制了一种分离花生果与花生秧且对花生果进行清选的可移动式花生摘果机,能够实现花生果实从喂料到摘果、集果的整个作业流程。
摘果机可自动对未摘净的花生进行重复作业,摘净率高,其分选装置包含风选、振动分选两部分,通过风选与振动分选机器能够去除大部分的花生叶、草叶等轻质杂质,以及泥土、土块及沙石等杂质。
田间试验表明:该移动式花生摘果机的未摘净损失率为0.73%,破碎率为2,1%,作业噪声为80dB(A),花生果含杂率为1.97%,纯工作小时生产率为2149ke,均符合花生摘果机的作业要求。
移动式花生摘果机实现了花生摘果的高速高效作业,对于我国全面推进花生生产机械化具有十分重要的意义。
关键词:花生摘果机;摘果机构;清选机构;集果提升装置中图分类号:S2251+3文献标识码:A 0引言花生是我国重要的优质油料与经济作物之一。
我国种植花生历史悠久,目前尤以河南、山东等省份种植面积最广且分布相对集中[1]o受各种因素影响,我国花生机械研究起步晚,发展速度缓慢,很多地区花生收获至今仍主要依赖人力完成。
为改善这一状况,更为我国花生机械发展提供动力,结合我国现在广泛采用的花生收获方式即挖掘与摘果分开作业方式,设计一款移动式花生摘果机,从而达到降低收获成本、提高收获作业效率的目的J9-2/o美国工业化程度高、进展快,早在20世纪5。
年代就开始研制花生联合收获机械,经过多年的发展逐渐形成了捡拾式的联合收获系统。
由于其花生植株为匍匐型,半喂入式联合收获机械很难完成摘果作业,因此多采用分段式花生收获机械[i6o花生摘果机主要用于花生果与花生秧蔓的分离作业,并可将摘下的花生果实进行适当的分拣、清理。
花生摘果机设计_毕业设计 精品
花生摘果机设计目录摘要 (1)关键词 (1)1前言 (1)1.1研究的目的和意义 (1)1.2国内外花生摘果机械的发展现状 (2)1.3本设计主要研究内容和研究方法 (3)1.3.1研究内容 (3)1.3.2研究方法 (3)2花生摘果的主要方式及摘果滚筒类型......................... .. (3)2.1轴流式钉齿滚筒............................... . (4)2.2蓖梳式圆柱形轴流滚筒....................................... .52.3差动式摘果滚筒............................................ ..53.花生摘果机的结构设计 ...................................... (6)3.1基本要求................................................. (6)3.2总体结构.................................................. ..6 3.3工作原理.................................................. ..7 4摘果装置传动系统的设计...................................... ..8 4.1电动机的选择和传动参数的设计.............................. ..9 4.2各轴的计算.............................................. (10)4.2.1各轴的转速计算........................................ (10)4.2.2各轴输入功率计算 (10)4.2.3各轴输入转矩计算 (10)4.3V带传动的设计 (10)4.3.1电机与风机V带传动的设计计算 (11)4.3.2风机与滚筒V带传动的设计计算 (13)4.3.3滚筒与筛子V带传动的设计计算 (16)5主要部件设计 (19)5.1摘果滚筒设计计算 (19)5.1.1确定滚筒类型 (19)5.1.2滚筒的直径 (20)5.1.3滚筒的长度 (20)5.1.4滚筒的线速度V (21)5.2滚筒轴装置的设计 (21)5.2.1根据轴向定位的要求确定轴的各段直径和长度 (22)5.2.2求轴上的载荷 (22)5.2.3按弯扭合成应力校核轴的强度 (24)5.2.4轴承的校核 (25)5.2.5轴上键连接的选择及校核 (26)5.3轴承座、端盖的结构设计 (26)5.4滚筒钉齿的设计 (26)5.4.1滚筒钉齿的形状的选择 (26)5.4.2滚筒钉齿的排列 (27)5.5凹板筛的设计分析 (28)5.6风机的设计 (29)6结论 (29)参考文献 (31)致谢 (32)附录 (32)花生摘果机设计摘要:本文通过对我国花生生产现状,摘果方式的调查研究,研制出全喂入式花生摘果机,满足了现阶段花生产区的要求。
一种花生摘果机设计说明书
目录摘要 (1)关键词 (1)1 前言 (3)1.1 研究的目的和意义 (3)1.2 国内外研究现状 (4)1.3 本设计主要研究内容和研究方法 (5)1.3.1 研究内容 (5)1.3.2 研究方法 (5)2 总体方案确定 (5)2.1 方案的选择和确定 (5)2.2 摘果装置的总体结构 (6)3 传动方案的确定 (7)3.1电动机的选择和传动参数的设计 (8)3.2 V带传动的设计 (8)3.3 带轮的结构设计 (10)4 滚筒装置的设计 (11)4.1 滚筒轴装置的设计 (12)4.1.1根据轴向定位的要求确定轴的各段直径和长度 (13)4.1.2 初步选择滚筒轴系 (13)4.1.3轴的强度校核 (13)4.1.4 轴承的校核 (17)4.1.5 键的校核 (18)4.2 摘果装置设计 (18)4.2.1 动刀条的设计 (19)4.2.2 动刀参数确定 (19)5.1直齿圆柱齿轮的设计 (20)5.1.1 直齿轮材料的选择 (20)5.1.2 由简化计算选定主要参数 (20)6 半喂入装置设计 (23)6.1 半喂入系统的结构设计 (23)6.2 具体结构的设计 (23)7 箱体 (24)8 机架 (24)9总结 (24)10展望 (26)参考文献 (26)致谢 ............................................ 错误!未定义书签。
一种花生摘果机设计摘要:半喂入式花生摘果装置是在传统的全喂入式摘果装置的基础上为降低花生的破碎率,降低能耗等问题上而定型的,与传统的摘果装置相比,最大的不同是采用的半喂入方式,这种方式功耗少,可靠性高,摘净率好,破损少。
适合于南方气候潮湿的花生摘果生产,小型方便,较合适家庭作业,为花生联合收割机的开发研究奠定了基础。
关键词:半喂入式;摘果装置;花生;能耗;Design Of One Groundnut PickerAbstract:Half feeding type peanut picker is rigid in the traditional all feeding type picker device based on the reduce the rate of peanut broken and power consumption. Compared to the traditional picker device, the biggest difference is the use of the half feeding type, and this type have low power consumption ,reliable working process, high picker off, and litter broken peanut. This device is suit for the production of peanut peaking in the humid southern climate , the design relatively small, more suitable foe homework, which is the foundation of study and design effective peanut harvester.Key words: type of half feeding; picker device ;peanut; power consumption1前言1.1 研究的目的和意义花生是世界上广泛栽培的主要油料作物。
机械毕业设计(论文)-全自动摘果机的设计与创新【说明书+cad+solidworks】[管理资料]
![机械毕业设计(论文)-全自动摘果机的设计与创新【说明书+cad+solidworks】[管理资料]](https://img.taocdn.com/s3/m/29eecceaff00bed5b8f31d20.png)
毕业设计(论文)题目全自动摘果机的设计与创新学号:学生姓名专业班级:学院指导教师(签字)职称讲师指导教师单位设计地点起止日期年月日至年月日摘要摘果机技术毫无疑问是未来的战略性高技术,充满机遇和挑战。
目前,国际上摘果机市场大概有80亿至100亿,其中工业摘果机占的比重最大。
2025年,整个摘果机市场将达到500亿,服务摘果机从原来的300多万台增加到1200多万台,特种摘果机(如:农业摘果机、排爆摘果机、医疗摘果机等)的呼声也越来越高。
另外,微软等IT企业,丰田、奔驰等汽车公司,甚至还有家具、卫生洁具企业都纷纷参与摘果机的研制。
本课题来源农业相关摘果机——摘果机。
随着摘果机技术的发展国内外开始探索相关技及先进成果应用在农业领域,其中果实采摘收割摘果机是农业领域中相对大的比重,相关摘果机随着技术进步及相关经验的成熟会为人们解放劳动力、提高工作效率等方面有不可估量的前景。
本文运用大学所学知识,设计了一款轮式摘果机,本摘果机通过轮式底部结构可自由行进并用5轴式机械臂结构可有效采摘果树上的苹果。
为进一步探索苹果采摘相关摘果机的研发提供了相关经验及依据,并对进一步论证相关技术有了实验的摘果机。
关键字:摘果机、农业,苹果采摘,轮式摘果机AbstractRobotics is undoubtedly a strategic high-tech future, full of opportunities and challenges. Currently, the international market, there are about robot 8 to 10 billion, which accounts for the largest proportion of industrial robots. 2025, the entire robot market will reach 50 billion, the service robot from the original more than 300 million units to 12 million units,Special robot (eg: agricultural robots, EOD robots, medical robots, etc.) are increasingly vocal. In addition, Microsoft and other IT companies, Toyota, Mercedes-Benz and other car companies, and even furniture, sanitary ware enterprises have involved in the development of the robot.The sources of agriculture-related topics robot - apple picking robots. With the development of robot technology at home and abroad began to explore the application of relevant technologies and advanced achievements in the field of agriculture, where the fruit harvest picking robot is agriculture relatively large proportion of the relevant robot as technology advances and experience of mature people will liberate labor force improve work efficiency and so have immeasurable prospects.In this paper, the university is knowledge, designed a wheeled robot apple picking, apple picking this wheeled robots can travel freely and bottom structure with a 5-axis robot arm structure can effectively picking apples fruit trees. To further explore the development of apple picking robot provides relevant and in accordance with relevant experience, and further related technology demonstration experiments with robots.Key words: Robot,Agriculture,Apple picking ,Wheeled robot全套设计,请加12401814目录摘要 (I)Abstract (II)1 引言 (1) (1) (2) (2) (3)UG设计基础 (4)2 摘果机的创新设计 (6) (8) (10)3 摘果机部分零部件选型及校核 (12) (14) (16) (18)4 摘果机的三维建模 (19) (20) (20) (21)结论 (22)致谢 (23)参考文献 (24)1引言摘果机与智能装备产业是高度集成微电子、通信、计算机、人工智能、控制和图像处理等学科最新科研和产业成果的前沿高新技术产业,是拟建的江苏省(常州)工业技术研究院的服务的产业核心和研发的产业立足点。
新型花生摘果机的设计

新型花生摘果机的设计摘果机的设计是为了解决花生摘果的问题,提高摘果效率和质量。
下面是一种新型花生摘果机的设计。
1.结构设计该花生摘果机的结构主要由机架、驱动系统、传动系统、摘果装置和控制系统组成。
机架采用优质钢材焊接而成,稳定且耐用。
驱动系统采用电动机驱动,提供动力为摘果机运行。
传动系统采用齿轮传动和链条传动,保证各部件的正常运转。
摘果装置主要包括摘果机械手和摘果储存装置,用于摘取花生果实并将其存放在储存装置中。
控制系统包括电气控制和机械控制,用于控制摘果机的运行和动作。
2.工作原理该花生摘果机的工作原理是通过机械手将成熟的花生果实摘取下来,然后将其存放在摘果储存装置中。
具体工作流程如下:首先,电动马达提供动力给传动系统,传动系统将马达的动力传递给摘果机械手;然后,摘果机械手通过机械控制系统调整位置和角度,准确地抓取花生果实;接下来,摘果机械手将摘取的花生果实放入摘果储存装置中;最后,电气控制系统对机械手和传动系统进行控制,保证摘果机的正常运行。
3.创新点该花生摘果机的创新点主要体现在以下几个方面:1)摘果机械手的设计:摘果机械手具有多个活动关节,可以根据花生果实的不同形状和位置进行灵活调整和抓取,提高了摘果的准确性和效率。
2)摘果储存装置的设计:摘果储存装置采用分格设计,每个格子都有足够的容量来装载花生果实,避免果实之间碰撞造成损坏,并且方便快速取出和清理。
3)电气控制系统的设计:电气控制系统采用先进的传感技术和自动控制算法,能够根据果实的形状和位置自动调整机械手的运动轨迹和速度,提高摘果的准确性和稳定性。
4.优势与应用该花生摘果机具有以下优势:1)高效率:摘果机械手能够持续不断地进行摘果,大大提高了摘果的效率,节约了人力和时间成本。
2)摘果质量好:机械手精确地根据果实的形状和位置进行抓取,避免了过度损伤果实,保证了摘果的质量。
3)可靠性高:该摘果机的结构牢固,采用优质的材料制造,具有较高的使用寿命和稳定性。
新型花生摘果机的设计
新型花生摘果机的设计一、引言花生是一种重要的粮食作物,在农业生产中广泛种植。
传统的花生摘果工作主要依赖人工完成,其效率低下,劳动强度大。
为了提高花生摘果的效率和减轻劳动强度,我们设计了一种新型的花生摘果机,以实现自动化的摘果过程。
本文将详细介绍该机器的设计和工作原理。
二、设计思路本设计旨在设计一种能够自动摘取花生的机器,通过机械装置实现自动化作业。
该机器包括花生识别装置、夹取装置、传输装置和控制系统等组成部分。
花生识别装置通过光学传感器或图像识别技术,实时监测花生的位置和状态,判断是否可以进行摘果操作。
夹取装置通过夹爪和传动系统,能够准确夹取花生,并将其放置到传输装置上。
传输装置是一个带有输送带的装置,能够将夹取的花生传送到集中的收集箱内。
控制系统通过对机器进行编程控制,实现花生的自动识别、夹取和传输。
三、具体设计1.花生识别装置花生识别装置采用图像传感器和图像处理技术,能够实时识别花生的位置和状态。
图像传感器将花生的图像传输到图像处理系统中,通过算法进行花生的特征提取和识别,判断花生是否可以进行摘果操作。
这样可以提高花生的识别准确率,并提高摘果的效率。
2.夹取装置夹取装置采用夹爪的形式,通过夹爪的开合来夹取花生。
夹爪的开合采用气缸驱动,通过气缸的伸缩动作来控制夹爪的开合程度。
夹爪的设计要考虑到花生的形状和大小,保证夹爪能够准确地夹取花生,并避免损坏花生。
3.传输装置传输装置采用传送带的形式,将夹取的花生传输到集中的收集箱内。
传送带的速度和方向可以通过电机控制,以适应花生的夹取和传输要求。
传送带的设计要保证花生的稳定传输和不受损坏,避免出现堵塞或卡住的情况。
4.控制系统控制系统通过对机器进行编程控制,实现花生的自动识别、夹取和传输。
控制系统采用嵌入式系统,具备快速反应和稳定性的优势。
通过与花生识别装置、夹取装置和传输装置的连接,实现全自动化的花生摘果过程。
四、工作原理1.花生识别装置实时监测花生的位置和状态,将识别的结果传输给控制系统。
花生摘果清选机试验方法及性能分析
c破 =
枷
2 ・ 5
.
碉 ■I
一 ■ _ _ _ ——■_
维普资讯
固 四 固 囝
w 小一 小样 的质 量 g 。
d .总 损 失 率
农 质 与督 机 量 监
降低 而 减 小 。 1 3 .对破碎 率的 影 响 从 三 次 试 验 测定 的数 据 中 明显 看 出 ,第 二 试验
式 中 :E 纯 工作 时 间生产 率 k / ; 一 g h w 果一 纯 工 作 时 间摘果 量 k ( 总 一w 损 ) gw ; T纯一 纯 工作 时 间 h 。
试 验 结 果 分 析
根 据 制定 的试 验 方 法 步 骤 ,对 5 HQ一15 Z 0 0型
重量 二 王亘重量 × 0% 1 0
取样 重 量
a .摘 净 率
c净 =— × 。 。 %
主 要 性 能 指 标 试 验 方 法 的 制 定
花 生 蔓 的 含 水 率 ,测 量 与 计 式 中 :C净 一 摘净 率 ; 算 方 法 和 花 生 果 的含 水 率 方 法 相 W 总 一 花 生 果 的 总 质 量 同。 ( 果 口的花 生 果 质量 +清选 、夹 出 2 、试 验 方法 带 、未 摘 净 损 失 质 量 +取 小 样 的
2 、喂入■的大小对性能指标的影响
a .对 生 产率 的 影 响 试 验 结 果 表 明 ,生产 率 的高低 ,主要 由喂人 量
T纯
大 小 决定 ( 筒 转速 一 定 ) 滚 ,喂 人量 大生 产 率 高 、喂
人 量 小生 产 率 低 。 b 摘 净 率的 影 响 .对 试验 结 果 表 明 ,随着 转 速 的提 高 ,喂 人量 的加
4LH-2型花生联合收获机设计与试验

由 发 动 机 、 架 、 走 机 构 、 作 系 统 组 成 。 发 机 行 操
动 机 采 用 3 5柴 油 发 动 机 , 大 功 率 2 . , 定 8 最 25kW 额 输 出 速 度 23 0rm 。变 速 箱 有 6个 档 位 , 速 一 档 5 p 低 为作 业 档 , 速 档 为道 路行 驶 档 。采 用 轮 式 宽轮 距 高
动 力 行 走 机 构 , 四驱 动 后 轮 转 向 ,轮 中 心 距 1
590m m 。
图 4 扶 禾 装 置
232挖 掘 装 置 采 用 长 方 形 倾 斜 平 面 铲 的 设 计 , .. 配 合 一 畦 两 行 左 右 配 置 , 定 在 机 架 两 侧 的 固 定 座 固 上 , 土 铲 尖 在 夹 持 拔 取 口稍 前 方 。 铲 柄 在 管 座 内 挖 可上 下 移 动 , 由螺 钉与 管 座 固定 。通 过 调 整挖 掘 并 点 、 土 深 度 及 铲 间 距 , 保 在 拔 取 植 株 前 铲 断 主 人 确
固树 立 以 人 为 本 、 全 发 展 的 科 学 理 念 , 保 护 人 安 把 民群众 的生 命 财 产 安 全 放 在 首位 , 服 困难 , 造 克 创
条件 , 努力开创农机安全管理工作新局面。 口
6 0 阿-表礼 2 1 年第6期 她 01
SHE ZHI AO Jl Z
后 输 送 ,而后 转 接 到秧 蔓 抛送 链 而 被 排 出机 后 , 完
SHE l ZA0 J ZHI
4 H 己型花生联台 收获i 设计 与试验 L一 I i 几
王进朝 ’ 陈思 刚 ’ 袁 求真 ’ 李 旭 华 : 1河 北 省 农 业 机 械 化 研 究 所 有 限 公 司 . 0 0 5 2河 北 省 电 力 勘 测 设 计 研 究 院 501 . 0 0 3 50 1
花生机械化收获技术-上[致富早班车] - 种植技术
![花生机械化收获技术-上[致富早班车] - 种植技术](https://img.taocdn.com/s3/m/424b646a001ca300a6c30c22590102020740f22a.png)
花生机械化收获技术-上[致富早班车]-种植技术学习农民四季生产;传授农民致富本领。
这里是每天早上4点30分到4点55分与您相约而至的致富早班车。
今天为您带来的主要内容是:花生机械化收获技术下集(胡志超产业片花)导语:早上好,听众朋友,欢迎您收听今天的“致富早班车”,我是杨林。
今天咱们继续学习花生的机械化收获技术。
通过昨天的介绍我们不难发现,目前我国农业机械化发展重点仍然是粮食作物,花生收获机械化问题只是在最近几年才逐渐引起学习和重视。
总体来看,我国花生收获机械化的研发与应用水平不仅与发达国家有很大差距,与我国小麦、水稻等主要粮食作物机械化水平也有较大差距。
现在,花生优势产区和出口基地对发展花生收获机械化呼声越来越高,农民热切盼望早日像小麦、水稻、玉米一样实现机械化收获,降低劳动强度,提高生产效率。
那么,我国花生机械化收获到底存在哪些问题?又该如何发展呢?今天我们继续来聊一聊。
(片花)主持人:今天接受我们采访的专家依然是农业部南京农业机械化研究所副所长、国家花生产业技术体系机械化装备岗位科学家胡志超研究员,专家:主持人好,听众朋友们好!主持人:胡老师,您好!感谢您再次接受我们的采访。
我们都知道,花生是我国最具国际竞争力的优势油料作物和蛋白资源,也是我国传统的出口创汇农产品。
但是,在机械化收获方面却仍然比较落后。
今天我们就想请您来为我们剖析一下其中的缘由。
专家:好的。
主持人:一般来讲,农作物的生产机械化与农作物产区、地域等实际情况有着紧密联系,那么,我国花生都主要种植在哪些地方?请胡老师先来介绍一下。
专家:我国花生种植区域广,种植范围大致东起黑龙江省密山市,西至新疆维吾尔族自治区喀什市,最南端到海南省三亚市,最北端到黑龙江黑河市,由北向南跨越寒温带、温带、亚热带和热带的广大地区。
其中主要分布在鲁、豫、苏、冀、皖、粤、闽、川等省,既有黄淮海平原、东北地区、长江流域等相对集中的优势产区,又有零星分散的种植区域,而且各地自然条件差别很大,花生播种和收获期都有很大不同,从而形成了我国花生品种、栽培制度和栽培技术的多样性。
全喂入花生摘果机关键装置设计分析与试验

全喂入花生摘果机关键装置设计分析与试验王㊀敏1ꎬ杨然兵1ꎬ2ꎬ尚书旗1ꎬ王凤婕1ꎬ王政增1(1.青岛农业大学机电工程学院ꎬ山东青岛㊀266109ꎻ2.山东省根茎类作物生产装备工程技术研究中心ꎬ山东青岛㊀266109)摘㊀要:根据花生机械化摘果作业要求ꎬ结合当前花生种植区域情况及摘果过程中存在的摘净率低㊁破损率高等问题ꎬ研制了与拖拉机配套的小型弯头杆齿式全喂入花生摘果机ꎬ可灵活移动㊁坚固耐用㊁操作便利ꎮ花生摘果机主要由摘果滚筒㊁凹板筛㊁振动清选装置㊁荚果运送及传动部分等组成ꎬ能够有效实现花生摘果㊁清选工作ꎮ田间性能试验表明:其摘净率98.16%㊁含杂率1.93%㊁破损率1.41%㊁清选损失率0.75%ꎬ各指标均满足花生摘果作业要求ꎮ关键词:花生摘果ꎻ弯头杆齿ꎻ全喂入中图分类号:S225.7+3㊀㊀㊀㊀㊀㊀文献标识码:A文章编号:1003-188X(2021)03-0141-050㊀引言花生作为一年生草本植物ꎬ是食用植物油与食品加工业的重要原料ꎬ具有很高的食用及医疗价值ꎬ是我国重要的油料作物及经济作物ꎮ其种植区域在我国分布较广ꎬ主要种植地区为山东半岛㊁河南㊁辽东半岛及黄淮河地区ꎮ花生机械收获类型主要分为联合收获和分段收获两种方式[2]:联合收获机械能一次完成花生植株挖掘㊁根部清土㊁秧果分离及荚果清选等工作ꎻ分段式收获前期由花生起收机等完成花生的挖掘条铺工作ꎬ后续再由花生捡拾收获机或摘果机完成荚果分离及清选工作ꎮ国外对花生收获技术与装备研究较早ꎬ在20世纪50年代末已全面实现了花生生产机械化ꎮ以美国为例ꎬ美国AMADAS㊁KMC㊁COLOMBO等公司针对花生不同种植模式㊁生长条件等情况先后研制花生起收机㊁捡拾收获机㊁条铺处理机㊁秸秆收获机械及荚果干燥运输设备等一系列花生机械化装备机型[3-4]ꎮ由于我国花生机械化生产装备技术研究起步较晚ꎬ现阶段花生的机械化水平与其他主要粮食作物相比仍存在较大差距ꎮ但在各研究院所及企业的努力下已陆续研制出一批花生收获机械ꎬ如青岛农业大学尚书旗收稿日期:2019-08-08基金项目:山东省现代农业产业技术体系花生产业创新团队项目(2019)ꎻ山东省协同创新中心项目(2115002)作者简介:王㊀敏(1992-)ꎬ女ꎬ山东即墨人ꎬ硕士研究生ꎬ(E-mail)562802356@qq.comꎮ通讯作者:杨然兵(1979-)ꎬ男ꎬ山东微山人ꎬ教授ꎬ硕士生导师ꎬ(E-mail)yangranbing@163.comꎮ教授㊁农村农业部南京农机化研究所胡志超研究员及沈阳农业大学高连兴教授所在团队针对国内花生收获特点与农艺种植特点研制了如4HQL-2型花生联合收获机㊁4HJL-2型花生捡拾摘果联合收获机㊁4HCDSm-100型花生收获机等收获机械[5-6]ꎬ促进了国内花生机械收获技术的发展ꎮ国内花生收获机按照喂入方式的不同分为全喂入式㊁半喂入式ꎬ目前常用的全喂入花生摘果装置类型主要有钉齿式㊁甩捋式㊁弹齿式㊁篦梳式及差动式等ꎮ受地形㊁地块面积限制ꎬ机型较大的花生收获机械在地势复杂等区域不易进行高效作业ꎬ而对应机型较小的可与拖拉机配套使用的小型花生摘果机则结构简单㊁适于在地形复杂区域移动操作[7-9]ꎮ针对目前小型区域及复杂地形中大型机械无法良好工作ꎬ同时也为解决花生收获作业时存在的摘果滚筒堵塞㊁含杂率高㊁摘净率低等问题ꎬ设计了全喂入式摘果机采用弯头杆齿式摘果装置ꎬ旨在为实现花生收获复杂地形及小面积作业中高效摘果提供参考ꎮ1㊀整体结构及工作原理1.1㊀总体结构全喂入花生摘果机由弯头杆齿摘果滚筒㊁网格凹板筛㊁振动筛㊁风机㊁喂料口㊁排秧口㊁运果带及机架等部分组成[10]ꎬ下方配置有行走轮ꎬ便于操作且移动方便ꎬ如图1所示ꎮ1.2㊀工作原理作业时ꎬ花生植株经喂料口喂入后掉落至摘果滚筒中ꎬ在滚筒上侧导向板及摘果齿杆作用下ꎬ花生植2021年3月㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀农机化研究㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第3期株沿轴向做螺旋运动[11]ꎻ进入滚筒的花生植株荚果受摘果齿杆的摩擦㊁拖拽㊁击打㊁揉搓㊁摔打及下侧静止凹板筛对其的刮拉㊁抓取作用从而实现摘果ꎻ摘果后的秧蔓做高速旋转同时又不断进行轴向移动ꎬ直至到达排秧口ꎬ随后在排秧板的拍打下排出摘果滚筒ꎻ摘下的荚果从凹板筛漏下受两侧滑板阻挡落入到下侧的振动筛ꎬ掉落振动筛过程中受到一侧风机风力作用将掺杂在花生荚果中的薄膜㊁叶片等轻杂质吹出分离ꎬ去除杂质后的花生荚果掉落至振动筛ꎻ振动筛在前后摆杆作用下往复作用下ꎬ土块㊁碎秧碎壳㊁泥土等杂质从筛条间隙漏下ꎬ荚果向后方运送至荚果输送带ꎬ在输送带后放可收集花生荚果袋进行收集ꎬ即完成全部摘果作业ꎮ1.外壳㊀2.摘果齿㊀3.喂料口㊀4.凹板筛㊀5.下料板㊀6.清选风机7.机架㊀8.地轮㊀9.振动筛㊀10.排料口㊀11.输果装置图1㊀全喂入花生摘果机结构简图Fig.1㊀Schematicdiagramofthepeanutfeedingsystem2㊀关键部件设计及相关参数2.1㊀摘果滚筒结构设计全喂入摘果滚筒按照喂入口及排秧方式不同分为轴流式㊁切流式ꎬ由于切流式摘果时花生植株沿着滚筒内侧切线运动作用时间短易出现漏摘现象ꎬ影响摘净率及含杂率ꎬ加大转速则会加大破碎率ꎬ目前国内的花生摘果装置大部分采用横轴流式摘果装置ꎮ考虑到摘果性能及成本造价ꎬ采用单筒横轴流式摘果装置ꎮ摘果作业要求摘净率高㊁破损率低㊁摘果损失率低ꎬ含杂率尽量小[12]ꎬ同时需确保摘果作业过程流畅无滚筒堵塞㊁摘果滚筒内部易清理㊁易更换齿杆ꎮ目前ꎬ现有的摘果装置中钉齿式摘果部件打击力度大易造成荚果破碎㊁甩捋式含杂率高㊁弹齿式摘果部件制作安装更换复杂等问题ꎬ本文选用弯头杆齿式摘果装置ꎬ完成整体全喂入摘果机结构方案设计ꎮ2.1.1㊀滚筒尺寸设计滚筒直径㊁滚筒长度及滚筒转速对摘果作业流畅性及作业质量有重要影响[13]ꎬ其关系为L=vt(1)式中㊀L 摘果滚筒长度(mm)ꎻ㊀v 花生轴向速度(mm/s)ꎻ㊀t 摘果时间(s)ꎮ通过分析现有装置及相关田间数据可知:摘果作业时轴向速度为470~590mm/sꎬ滚筒转速范围在450~550r/minꎬ摘果时间为2~3sꎬ根据式(1)算得滚筒长度范围为940~1770mmꎮ综合机型适应需满足便于移动等要求[14]ꎬ最终确定摘果滚筒设计长度为1330mmꎮ作业中摘果滚筒转速一定时ꎬ滚筒直径过大易导致破碎率增大ꎬ直径过小造成秧蔓堵塞㊁齿杆磨损㊁破碎率增大等问题ꎬ受力分析如图2所示ꎮ图2㊀摘果滚筒受力分析Fig.2㊀Forceanalysisofthepickingdrum由于摘果装置与凹板筛偏心配置ꎬ可根据弯头杆齿式摘果滚筒尺寸与摘果间隙范围确定凹板筛的安装配置要求ꎮ为确定滚筒直径ꎬ简化各位置受力后分析可知:当植株位于上侧时ꎬ离心力最大ꎬ滚筒直径D最大ꎬ则有FT-FLcosξcosλ-mgcosδ>0(2)FL=mω2D2(3)FT=F拉cosξ(4)式中㊀F拉 花生植株受滚筒拉力(N)ꎬF拉=7~20ꎻ㊀FT 受拉力投影在二维平面上的力(N)ꎻ2021年3月㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀农机化研究㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第3期㊀FL 滚筒旋转产生的离心力(N)ꎻ㊀ω 滚筒角速度(rad/s)ꎻ㊀m 花生植株质量(kg)ꎬm=0.15~0.2ꎻ㊀λ FT与滚筒直径之间夹角(ʎ)ꎻ㊀ξ 花生植株与二维平面的夹角(ʎ)ꎻ㊀δ 植株重力与滚筒直径之间的夹角(ʎ)ꎮ为防止滚筒堵塞保证工作流畅ꎬ需满足ξ=λ=δ=0ꎮ整理上述可得D>2(F拉+mg)mω2(5)式(5)代入数据可得到ꎬ直径D应大于360mmꎬ参考目前花生摘果装置类型尺寸ꎬ分析现有单轴流全喂入式摘果装置工作现状确定摘果直径约为410mm(齿外端)ꎮ2.1.2㊀弯头杆齿摘果装置部件结构设计摘果滚筒中摘果齿杆及摘果元件是影响花生荚果的破损率及摘净率的重要因素ꎮ目前ꎬ摘果装置常用的摘果部件中存在钉齿易造成荚果破碎率高㊁甩捋式易造成秧蔓缠绕㊁弹齿式则加工制造较复杂ꎬ以及篦梳式制作复杂不易更换等一系列问题ꎮ本文选用弯头杆齿式齿杆ꎬ在进行作业时摘果滚筒转动产生的动能将通过弯头杆齿作用于花生荚果上ꎬ如图3所示ꎮ1.排秧板㊀2.螺栓㊀3.轮毂㊀4.弯头杆齿㊀5.摘果齿杆㊀6.支撑圈图3㊀弯头杆齿式摘果机构示意图Fig.3㊀Schematicdiagramoftheelbowrodpickingmechanism滚筒主轴上固定4个相同直径为330mm的支撑圈ꎬ弯头杆齿两两间距范围在75~180mm之间ꎬ杆齿直径约8mmꎬ竖直部分长度约90mmꎬ弯曲部分长40mmꎬ折弯角度约40ʎꎬ杆齿材料选用须具有足够的强度和刚度ꎬ满足承受摘果过程中的切向力㊁持续正常工作的要求ꎮ杆齿选用材料为45钢ꎬ当量摩擦因数μ为0.15ꎬ杆齿用螺栓安装于支撑圈上ꎬ便于更换ꎮ花生荚果主要在弯头杆齿㊁凹板筛的打击㊁拽拉㊁摩擦㊁梳刷作用下实现果柄分离[15]ꎬ花生秧蔓在位于上方的导流板及在靠近排秧口处安装的排秧板引导作用下排出滚筒ꎮ2.2㊀凹板筛的设计对于横轴流式全喂入式摘果机ꎬ喂料口通常位于凹板筛的一侧ꎬ摘果滚筒外盖在喂入口一端设有外延挡板保证花生秧蔓的持续喂入工作[16]ꎬ喂入口间隙设计为270mmˑ140mmꎬ有利于花生秧蔓有序喂入作业ꎬ如图4所示ꎮ图4㊀凹板筛结构示意图Fig.4㊀Schematicdiagramoftheconcavescreenstructure采用圆柱形网格设计ꎬ凹板筛通过与弯头杆齿式摘果装置相配合进行秧果分离工作ꎮ花生植株在滚筒内运动时在导向板及齿杆作用下螺旋前进受到摘果齿杆及凹板筛的打击㊁拽拉㊁梳刷㊁运动阻挡等作用ꎻ滚筒中碎秧㊁荚果经凹板筛栅格间隙掉落至振动筛或由风机吹出ꎮ凹板筛与摘果齿杆部件最外端的距离为即摘果间隙ꎬ可通过螺栓进行调节ꎬ调节范围为30~50mmꎻ凹板筛栅格大小影响花生摘果性能ꎬ即摘净率㊁破损率ꎬ若间隙过大易造成摘净率不高ꎻ间隙过小易造成秧蔓堵塞影响摘果效率ꎬ保证摘果率㊁降低破损率ꎬ凹板筛栅格间隙设计为65mmˑ65mm栅格式ꎮ2.3㊀清选装置结构设计清选装置主要由振动筛及风机组成ꎬ主要完成荚果除杂工作ꎮ在进行清选工作时ꎬ荚果与秧蔓叶㊁破碎果壳㊁其他杂质一同落至下侧的振动筛ꎬ动力经皮带轮传至振动筛下侧牵引轴ꎮ振动筛在平行四杆机构作用下往复运动与风机共同进行除杂工作[17]ꎬ振动筛设计(见图5)ꎮ后侧两端设斜度挡板防止花生荚果在往复振动中掉落从而降低荚果损失率ꎮ根据花生尺寸及脱出杂质特点ꎬ最终设计振动筛尺寸为长1410mmꎬ宽330mmꎮ清选后的荚果需向后侧移动运至送果装置完成输果工作ꎬ往复运动由前摆杆㊁后摆杆共同完成ꎬ前2021年3月㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀农机化研究㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第3期后摆杆分别安装在机架上ꎬ由高度差设计为160mm实现连动ꎮ1.前摆杆轴㊀2.牵引轴㊀3.后摆杆轴图5㊀振动筛结构示意图Fig.5㊀Schematicdiagramofthevibratingscreen3㊀性能试验与结果3.1㊀试验条件试验在山东省青岛万农达花生机械有限公司进行ꎬ所选用的试验样机如图6所示ꎮ图6㊀花生摘果机试验样机Fig.6㊀Peanutpickingmachinetestprototype试验选用花生品种为山东地区主要种植品种鲁花11号ꎬ品种荚果整齐集中ꎬ花生百果质量197~220.0g左右ꎬ百仁质量93.0g左右ꎬ果仁含水率范围41%左右(因晾晒厚度不同有所差异)ꎬ平均花生植株长36cmꎮ试验指标:摘净率C1㊁破碎率CS㊁含杂率Z㊁清选损失率Q分别为C1=W-W1Wˑ100%(6)CS=WSW-W1ˑ100%(7)Z=WZZWX+WZZˑ100%(8)Q=WQWˑ100%(9)其中ꎬW为花生荚果总质量(kg)ꎻW1为未摘果花生荚果质量(kg)ꎻWS为损伤的花生荚果质量(kg)ꎻWZZ为花生荚果排出口接取侧区内的所有排出物中所含杂质质量(g)ꎻWX为花生荚果排出口接取侧区内的所有排出物中所含荚果质量(g)ꎻWQ为清选损失花生果质量ꎮ3.2㊀试验结果花生经挖掘后放置于田间晾晒3天ꎬ试验时将花生植株称量分组ꎬ花生植株要求称量后分组排放整齐进行连续喂入ꎬ喂入量为0.4kg/sꎬ滚筒转速为500rad/minꎬ选用摘果间隙40mmꎬ进行10次田间试验ꎬ每次试验3minꎬ将记录试验结果最终取平均值进行记录ꎬ如表1所示ꎮ田间性能试验表明:摘果机工作指标为摘净率98.16%㊁含杂率1.93%㊁破损率1.41%㊁清选损失率0.75%ꎬ根据«NY/T993-2006花生摘果机作业质量»要求满足花生机械化收获中的作业质量指标ꎬ能良好完成小区域灵活摘果作业ꎮ表1㊀试验结果Table1㊀Testresults%㊀序号测试项目作业质量指标试验结果1摘净率 98.162破损率ɤ4.01.413含杂率ɤ2.01.934清选损失率ɤ1.00.754㊀结论1)通过资料分析与数据计算对摘果滚筒㊁凹板筛等部分进行设计与说明ꎬ设计了适用于小面积作业㊁灵活使用的全喂入弯头杆齿式摘果机ꎬ能够有效降低花生荚果损伤率ꎮ2)在进行摘果滚筒结构设计后ꎬ对于荚果清选进行了详细论述ꎬ在保证清选效果下便于后续荚果的收集与加工工作ꎮ3)试验结果表明:弯头杆齿式全喂入花生摘果装置摘净率98.16%㊁含杂率1.93%㊁破损率1.41%ꎬ清选损失率0.75%ꎬ符合花生摘果作业要求ꎮ参考文献:[1]㊀万书波ꎬ王才斌ꎬ朱建华.山东省花生产业优势㊁问题及对2021年3月㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀农机化研究㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第3期策[J].山东农业科学ꎬ2004(5):5-8.[2]㊀陈中玉ꎬ高连兴ꎬCHENCharlesꎬ等.中美花生收获机械化技术现状与发展分析[J].农业机械学报ꎬ2017ꎬ48(4):1-21.[3]㊀高连兴ꎬ刘维维ꎬ王得ꎬ等.典型花生收获工艺流程及相关机械术语研究[J].花生学报ꎬ2014ꎬ43(3):26-30. [4]㊀田连祥.花生有序条铺收获机理研究[D].青岛:青岛农业大学ꎬ2017.[5]㊀胡志超ꎬ陈有庆ꎬ王海鸥ꎬ等.我国花生田间机械化生产技术路线[J].中国农机化ꎬ2011(4):32-37. [6]㊀吕小莲ꎬ王海鸥ꎬ张会娟ꎬ等.国内花生机械化收获的现状与研究[J].农机化研究ꎬ2012ꎬ34(6):245-248. [7]㊀尚书旗ꎬ刘曙光ꎬ王方艳ꎬ等.花生生产机械的应用现状与进展分析[J].花生学报ꎬ2003(S1):509-517. [8]㊀张冲ꎬ胡志超ꎬ邱添ꎬ等.国内外花生机械化收获发展概况分析[J].江苏农业科学ꎬ2018ꎬ46(5):13-18. [9]㊀牟力.花生生产机械发展现状及趋势[J].农业科技与装备ꎬ2015(1):72-73.[10]㊀曾陈铠ꎬ袁鹏飞ꎬ胡江涛.自走式花生摘果机设计与试验[J].农业开发与装备ꎬ2017(1):68ꎬ72.[11]㊀周德欢.花生联合收获全喂入摘果特性试验研究[D].北京:中国农业科学院ꎬ2017.[12]㊀胡志超.半喂入花生摘果装置的优化设计与试验[C]//2012中国农业机械学会国际学术年会论文集.北京:中国农业机械学会ꎬ2012:7.[13]㊀王晓燕.半喂入式花生摘果试验台的设计与试验研究[D].莱阳:莱阳农学院ꎬ2006.[14]㊀陈丽娟ꎬ陈中玉ꎬ高连兴ꎬ等.基于两段收获的螺杆弓齿轴流式花生摘果装置研究[J].沈阳农业大学学报ꎬ2016ꎬ47(5):581-588.[15]㊀王冰.四行半喂入花生联合收获摘果机理与筛选特性研究[D].北京:中国农业科学院ꎬ2018.[16]㊀程晋.全喂入式花生摘果机摘果滚筒改进设计方案[J].农业科技与装备ꎬ2013(6):33-34.[17]㊀罗高连兴ꎬ杜鑫ꎬ张文ꎬ等.双滚筒气力循环式花生脱壳机设计[J].农业机械学报ꎬ2011ꎬ42(10):68-73.DesignAnalysisandTestofKeyEquipmentforFullyFedPeanutPickingMachineWangMin1ꎬYangRanbing1ꎬ2ꎬShangShuqi1ꎬWangFengjie1ꎬWangZhengzeng1(1.CollegeofMechanicalandElectricalEngineeringꎬQingdaoAgriculturalUniversityꎬQingdao266109ꎬChinaꎻ2.ShandongEngineeringResearchCenterforRootandShootCropProductionEquipmentꎬQingdao266109ꎬChina)Abstract:Accordingtotherequirementsofpeanutmechanizedfruitpickingoperationꎬcombinedwiththecurrentpeanutplantingareaandthelowpickingrateandhighdamagerateintheprocessofpickingfruitꎬasmallelbow-toothedfull-feedpeanutpickingmachinewithflexibleuseoftractorswasdeveloped.Flexibleꎬruggedandeasytooperate.Thepeanutpickingmachineismainlycomposedofafruitpickingdrumꎬaconcavescreenꎬavibrationcleaningdeviceꎬapodconve ̄yingandatransmissionpartꎬetc.ꎬandcaneffectivelyrealizethefruitpickingandclearingworkofthepeanut.Thefieldperformancetestshowedthattheextractionratewas98.16%ꎬtheimpuritycontentwas1.93%ꎬthedamageratewas1.41%ꎬandthecleaninglossratewas0.75%.Alltheindicatorsmetthepeanutpickingoperationrequirements.Keywords:peanutpickingꎻelbowrodteethꎻwhole-feel2021年3月㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀农机化研究㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第3期。
花生摘果机的结构毕业设计

花生摘果机的结构毕业设计XXXXXX 毕业设计说明书题目:花生摘果机的结构设计学院: XXXXXX专业:机械设计制造及其自动化学号: XXXXXX姓名: XXXXXX指导教师: XXXXXX 博士完成日期: 2012年5月27日目录中文摘要 ................................................................. I 1 前言 . (1)1.1 研究目的意义 (1)1.2 国内外研究现状 (1)1.3 本设计主要研究内容和研究方法 (2)1.3.1 研究内容 (2)1.3.2 研究方法 (2)2 总体方案确定 (2)2.1 方案的选择和确定 (2)2.2 摘果装置的总体结构 (3)3 传动方案的确定 (4)3.1电动机的选择和传动参数的设计 (5)3.1.1 钉齿条上的钉齿转速 (5)3.1.2钉齿滚筒的转速 (6)3.1.3 电动机的功率 (6)3.1.4 电动机的转速 (6)3.2 V带传动的设计 (7)3.3 带轮的结构设计 (11)4 滚筒装置的设计 ........................................ 错误!未定义书签。
4.1 滚筒轴装置的设计 ................................... 错误!未定义书签。
4.1.1根据轴向定位的要求确定轴的各段直径和长度........... 错误!未定义书签。
4.1.2 初步选择滚筒轴系 .................................. 错误!未定义书签。
4.1.3轴的强度校核....................................... 错误!未定义书签。
4.1.4 轴承的校核 ........................................ 错误!未定义书签。
4.1.5 键的校核 .......................................... 错误!未定义书签。
国家花生产业技术体系赴南充开展花生机械化摘果试验示范

讨论结束后 ,与会的专家领导一起到玉米机收现 场 观摩 了福 田玉 米 收割 机 的作 业情 况 。最 后在 农
业 部农 机推 广 总站 刘 宪站 长 的主持 下 ,来 自全 国 各地 的农 机 、 艺专 家 围绕 《 强农 机农 艺 融合 促 农 加 进 玉米 生产 全程 机 械化 意见 》 玉 米生 产 机械 化 和《 技术 指导 意 见》 两个 文件 的征求 意 见稿 献计 献策 、 展 开 了激烈 的讨 论 。本 次会 议 为玉 米生 产农 机 农 艺技术 融 合奠 定 了坚实 的理 论基 础 。
方案 , 印发 了《 加强农机农艺融合 , 加快推进薄弱 环节 机 械化 发展 的意见 》对 促进 农 机农 艺融 合 的 ,
目标 任务 、政 策 措施 和 建立 协调 机制 等 提 出 了明 确的要求 。 今年早些时候 . 农业部先后就甘蔗生产 机械 化 、主要 农 作物 农 机农 艺融 合技 术 等 问题 召 开 了专题 研讨 会 .进 行 了深 入 的研究 并 提 出指导 意见 。本 次玉 米 生产农 机 农 艺技 术 融合座 谈 会是
种植面积的 2%; 6 玉米产量为 1 亿吨左右 . . 5 占粮 食 产量 的 3%,玉 米生 产 在我 国粮 食 生产 中 占有 0 极其重要的地位。2 1 年 , 国玉米耕 、 、 00 全 种 收水 平 分别 达 到 8.%、25 35 7 .%和 2 . .但 从 全 国整 57 % 体来看 , 各玉米产 区机械化发展不平衡 . 各省份相 差悬 殊 : 各作 业环 节 机械 化水 平 相差 较 大 , 别 是 特 玉米机收仍是亟待突破的薄弱环节 : 玉米育种 、 栽
业管理司及部属事业单位 的有关负责同志 ,国家 玉米 产 业 技 术体 系科 学 家及 育 种 、 培 、 保 、 栽 植 土 肥 、 虫 害 防治及 农业 机 械等 有关 行 业 的专家 , 病 玉
自走式花生摘果机设计与试验

家 花生 的机 械 收获 相 比还 是 与我 国小 麦 、水 稻 和 玉米 等 粮食 作 物 相 比均 有 很大 差 距 ,恰 恰 收 获作 业 是 花生 整 个 生产 过 程 中难 度最 大 、花 费 最 大 的环 节 ,也 是 目前 花 生机 械 化 生产 亟 需 解决 的主要
进 行捡 拾 收 获 ,主 要 由捡 拾 装 置 、输 送 装置 、摘 果装 置 、集 果 装 置 组 成 ,可 一 次完 成捡 拾 、输 送 、摘 果 、分 离 清 选 、收 集 等 功能 ( 如 图1 所示 )。
它 不仅 能 实 现对 铺 放 在地 表 的 花生 进 行 机 械化 捡 拾 、输 送 、 摘 果 、筛 选 、集 果 等联 合 作 业 ,也 能 够解 决 现 有 花生 摘 果机 型 需
生 被捡 拾 到托 板 上之 后 ,被搅 龙拨 到 输送 装 置 ,然 后 由输 送装 置
输送 到摘 果机 构 。
积 的2 0 %,居 世界 第2 位 ,产量 约 为1 5 0 0 0 k t ,占 世界总 产量 的3 5 % 左 右 ,居 世 界 第 1 位 …。随 着 农 业 结 构 和 市 场 调 节 作 用 的 t 3 益 明
关键 词 :花生 ; 自走 ;捡拾 ;摘 果 ;设计 ;试验
0 引言
花 生 在 我 国种 植 范 围广 泛 ,几乎 涉 及 除青 海 省 以 外的 所有 省 份 ,2 0 1 0 年 我 国花 生 种植 面 积约 为 4 6 6 6 . 7 k h m ,占世 界种 植 总 面
工 作 时 , 当机具 向前 开进 的时候 其 传 动装 置将 动力 传 递 给捡 拾 器轴 ,使其 转 动 ,从 而 弹簧 轴也 会 转 动 ,因此 弹 簧轴 上 的 弹簧 随 着机 具 的前 进 ,会把 田问地 面 上 的花 生捡 拾 到花 生托 板 上 ,花
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
0 引言
花 生 是 我 国重 要 的油 料作 物 和 优 质 蛋 白质 资 源 , 也 是 我 国最 具 国 际竞 争 力 的 优 势 作 物 和重 要 的 出 口 创 汇农 产 品 之一 。 当前 , 升 花 生机 械 化 收获 水平 , 提 提 高 花生 生 产效 率 是 我 国 花生 产业 面 临的 重大 问 题 。 花 生 摘 果 机 是 花 生 分 段 收 获 作 业 模 式 下 的 一 种 重 要作 业 机 具 , 目前 已在 我 国花 生 主 产 区获得 推 广 应 用 , 可有 效 替 代人 力 , 它 提高 作 业效 率 。 喂 人方 式 的 按 不 同 , 分 为半 喂人 式 花 生摘 果 机 和 全 喂人 式 花 生 摘 可
业 性 能不 稳 定 、 生产 效 率低 等 一 系 列 问 题 。 目前 在 实
际生 产 中未 获 得 良好 的推 广应 用 。 何 提 升半 喂 人 花 如
持 输 送链 8 喂人 I( 于 1 2 间)花 生 秧 蔓 被 夹 持 的 :位 1 、之 ,
输 送 链 8 输 送 导 轨3 和 向前 输 送 ; 在果 秧 输 送进 入 摘 果
新设 计 ,有 效提 高 了半 喂人 花生 摘果 机 的作 业效 率 和
作 业 稳定 性 , 结 构 轻 简 、 作 方便 , 且 操 对促 进 半 喂人 花 生摘 果 机推 广应 用 、满 足我 国花 生机 械化 收 获 的多元 化 需求 具有 重要 意义 。
1 整 机 结 构 与 工 作 过 程
21 0 2年 第 1期 总第 2 9期 3
中国农 机化
C ie e Ag c l r lMe h nz t n h n s r u t a c a iai i u o
No 1 01 . ,2 2 T tlNo2 9 o a . 3
4 Z 一2 花 生摘 果机 的设计 与试验水 H B A
王伯凯, 胡志超, 吴努, 张延化, 王海鸥.H B 2 花生摘果机的设计与试验叨. 4 Z -A 中国农机化, 0 2(: 114 2 1,1 1 — l )l
WA GB - a H h-h oWU N , H N a -u, N ok i U Z ie a, u Z A G Y n h aWAN a- u D s nadep r n f H B 2 en t ikr , G H io. ei n x e met o Z - A p au ce 叨. g i s 4 p
段 ( 图 1之 前 , 生 果 秧 的结 果 段 在 导 秧 折 弯 杆 5 如 ) 花 的
业顺 畅 、 产率高 、 果质量好 , 生 摘 具有 良好 的市 场前 景 。
关键 词 : 生 ; 果 机 ; 获 ; 究 ; 计 花 摘 收 研 设 中 图 分 类 号 :2 57 3 ¥2. + 文 献 标 识 码 : A d i1. 6 /i n10 — 2 5 2 1.1 3 o: 03 9js . 6 7 0 . 0 20 . 0 9 .s 0 0
果 机 。全 喂 人 式 花生 摘 果 机 主要 用 于 花 生 干摘 作 业 .
本文在 全 面调研 我 国花 生生 产 实 际和现 有半 喂 人 花 生摘 果机 的基 础上 .设计 了一 款新 型 的半 喂人 花 生
摘 果 机 , 用单 链 双 辊 配 置 、 平 喂秧 、 采 水 自动折 秧 等创
4 B A型 花生 摘 果 机 结构 如 图1 示 . HZ 一2 所 主要 包
括 摘果 辊 、 持 装 置 、 秧杆 、 架 、 动 系统 等 组 成 。 夹 导 机 传
具 有 喂人 量 大 、 产 率高 、 耗 大 、 果 质量 差 等 特 点 生 功 摘
Ⅲ; 喂 人式 花 生 摘果 机 可 用 于鲜 摘 和 干 摘 作业 , 比 半 相 而 言 , 有 喂 入 量 小 、 产 率 低 、 耗小 、 果 质 量 好 具 生 功 摘
摘 果 与秧 蔓 输 送 组 件示 意 如 图2 示 ,摘 果 与 秧蔓 输 所 送 组 件 由夹 持 输 送 链 、 秧 折 弯 杆 、 对 叶 片 式 摘 果 导 一
辊 组 成 。摘 果 机 在 发 动 机 的驱 动 下 实 现 花 生 果 秧 输
等 特 点 , 以 较 好 地 满 足 鲜 嫩 花 生 收 获 要 求 , 其 是 可 尤
在 我 国南 方 花生 产 区具 有 较 大 的市 场 需求 。 半 喂 人 但
送 、 果 作业 。具 体 工作 过 程 为 : 业 时 , 工 整理 花 摘 作 人
生果 秧 并 整 齐 摆 放在 喂 人 台 架 l . 水 平 推送 至 夹 上
花 生 摘 果 机 技 术 要 求 更 高 , 造 成 本 大 , 还 存 在 作 制 且
王 伯 凯1, 志 超 吴努 张 延 化 王 海 鸥 '胡 2 , , ,
(. 1 南通 大 学机 械工 程学 院 ,江 苏南通 ,2 6 1 ;2 农 业部 南京农 业 机械 化研 究所 ,南 京 市 ,2 0 1) 20 9 . 1 0 4
摘 要 : 绍4 Z 一2 介 H B A型 花 生摘 果 机 的整 机 结 构 、 作 过 程 及 性 能 特点 。 导 秧 折 弯杆 、 送装 置 、 果 对 辊 等关 键部 件 作 详 工 对 输 摘 尽 阐 述 。试 验 确 定 最 佳 工 作 参 数 为 辊 筒 转 速 30/ i , 持 链 速 0 5 /、 简 直径 2 1 m, 地 试 验 证 明 : 机 运 行 可 靠 、 3r n夹 m . ms辊 5 5r 实 a 该 作