2005年电子大赛二等奖 凌阳SPCE061A_悬挂运动控制系统 江苏大学 张寿龙 田兆垒 赵生禄要点
基于凌阳SPCE061A单片机的智能小车的设计

( .eigUn .0 c. n eh .B in 00 3 C ia2 B in ul n t a d e .B i 0 43 C ia 1 B in i f i a dT cn ,e i 10 8 ,hn ; . ei B i igMae l I .Sh , ei 12 0 , hn ) j v S jg jg d i r sn j g n
中图分 类号 : P 8 T I 文献 标识 码 : A 文章编 号 : 6 3 6 9 2 0 )9 0 5 3 1 7 — 2 X(0 7 0 —0 4 —0
De i n f I e lg n e Ve c e Ba e n PCE0 A s g o nt li e c hi l s d o S 61 S r a i l e i lS ng e Chi o e s r p Pr c s o
维普资讯
第
"
期
计 算 机 技 术 与 发 展
0oⅣ I 丌E R TECHN0I GY o AND DEVEL OPMENT
2 0 9 0 年 7
V0 . 7 No 9 11 . S p 2 0 e. 07
基 于 凌 阳 S C 0 1 单 片 机 的 智 能 小 车 的设 计 P E 6A
,
-
吴 荣 芳 , 冀伟 ,刘 一
(. 1 北京科 技 大 学 , 京 10 8 ; . 北 0 0 32 北京建 材 工业 学校 , 京 1 20 ) 北 0 43
摘 要 : 了智 能语 音 、 障小 车 的一种 制作 方法 , 出了控 制系统 的硬 件和 软 件设 计 。控 制 系统 的硬件 电路 部 分 主要 介绍 避 给
凌阳科技大学计划实验室共建方案
目录第1章实验室建设方案介绍(2005) (3)3.1实验箱的功能和配置 (3)3.2实验箱用途 (3)3.3实验室共建方案 (3)3.4实验室所包括的硬件设备及相关软件和资料(硬件设备总价值为RMB100,000) (4)3.5共建实验室的优惠政策 (4)第1章实验室建设方案介绍(2005)凌阳科技股份有限公司是台湾最大的消费性IC设计公司,为回馈教育、改善大专院校单片机教学条件特推出具有长期战略意义的凌阳大学计划。
共建十六位单片机实验室是凌阳大学计划的一项内容。
以凌阳16位单片机SPCE061A为核心开发出来的实验教学系统——实验箱,以操作方便、易学易用、功能强大而受到了广大在校师生以及业界用户的欢迎。
为了更好地开展和贵校的合作,特为贵校做了这套实验室共建方案。
3.1实验箱的功能和配置该实验箱具有DSP功能和语音特色适用于所有和单片机相关专业的学生,能最大程度的激发学生的学习兴趣、巩固学习效果、达到事半功倍的学习效果。
而且它是十六位单片机有着八位单片机所没有的优势。
1. CPU为Sunplus的SPCE061A 16位SOC单片机2. 采用动态扫描方式连接4*4矩阵键盘和7位8段数码管3. 外接1*8高低电平发生按键和8个LED灯4. 提供5V I/O输出电路以及外接5V和3.3V接座5. 提供两路0-3.3V可变电压可方便的完成AD的数据采集实验6. 扩展双色8*8 LED点阵可以完成图形显示以及子模显示之类的基础实验7. 扩展RS232接口可直接与计算机进行通信或者进行单片机之间的双机通信8. 扩展SIO存储芯片SPR4096A可选择4M Bits Flash 或者2M Bits SARM作为存储方式9. 扩展USB1.1接口提供完整的单片机固体程序上位机驱动程序源代码及其完整的软件包和应用范例10. 扩展带背光的点阵液晶这是一款128x64的点阵LCD自带驱动SPLC501.SPLC501是凌阳的一个LCD驱动芯片采用最新的TOG技术使驱动和液晶合二为一11. 内置音频输出电路采用凌阳功放SPY0030可以有效的体验SPCE061A给您带来的听觉效果12. 内置MIC输入电路配合SPCE061A内部的AGC和OPI电路可获得不错的语音数据13. 内置ICE电路配合我们的PROBE和IDE可方便的实现在线编程14. 提供所有外围电路的原理图IDE环境下的所有实验的源代码以及方便快15. 实验箱使用说明书16. 预留外接FPGA之类的万用扩展插座17. 配备上下册的《实验指导书》3.2实验箱用途可以面向全体学生(本科生和研究生),并辅助开展单片机教学;可以完成课程设计、毕业设计、电子竞赛等动手实践以及产品开发的前期实验工作;保证所有学生都能学习单片机知识,更选拔了一批英才在各种电子竞赛中脱颖而出。
基于凌阳SPCE061A单片机远程家电控制器的研制

2
系统 硬 件 电路 的 设计
统 会 发 出 挂 机 指 令 ,O 8恢 复 高 电平 , 电 器 断 开 , 话 线 两 端 的 电 IA 继 电 压 恢 复 到 6 V左 右 的 正 常 电 压 , 而 实现 挂 机 。其 电路 如 图 4所 示 : 5 从
后 . 片 机 就 可 以控 制 摘 机 电 路 , 现模 拟 摘机 。其 电路 如 图 3所 示 : 单 实
图 3 铃 音检 测 模 块
23 摘 机 模 块 -
当 C U检 测 到 有 振 铃 信 号 并 且 计 数 已经 达 到 系 统所 设 定 的 可 以 P 摘 机 的次 数 . 片 机 会 送 出 摘 机信 号, I A 单 使 O 8脚 为 低 电平 , 即继 电 器 工
一
铃音检测模块 的主体芯片是 HT 0 0 振铃信号经 过隔直 电容后 , 93 。
1 系 统 工 作过 程
对 家 电进 行 远 程控 制 , 当有 电话 接 入 时 , 制 器 首 先 进 行 振 铃 计 控 数 . 振 铃 次数 大于 六 次 而 无 人 接 听 时 , 备 会 自动 摘 机 , 现 控 制 器 当 设 实 的 网络 联 机 , 作 者 根 据 语 音 提 示 输 入 密 码 , 操 当系 统 接 收 到 来 自对 方 的 按 键 信 号后 . 过 按 键 译 码 分 析 处 理 , 配 密 码 。 密 码 正 确 之 后 , 经 匹 根 据 语 音 提示 进 行 相 应 操 作 。系 统 会 根 据 按 键 所 对 应 的 操 作 发 出 指 令 , 进 行 状 态 查 询 . 电控 制 , 话 , 改 密 码 的 选 择 , 现 对 家 电 的 远 程 家 通 修 实 控制。如图 1 示 : 所
电动车跷跷板设计 采用凌阳SPCE061A 16位单片机作为控制核心 大学生电子设计竞赛山东省一等奖

摘要本设计采用两个凌阳SPCE061A 16位单片机作为控制核心。
其中一个安装在小车上,另一个持在使用者手中连接键盘和LCD,通过无线模块进行双机通讯,实现远程对小车运行状态的实时监测。
为了对小车的行为进行精确控制,采用步进电机进行驱动。
系统通过倾角传感器采集跷跷板的倾角变化后传给单片机。
程序控制方法采用PID算法,使小车通过一个二阶欠阻尼脉冲响应过程最后趋于动态平衡。
根据设计需要,车体采用有机玻璃与铝合金自制而成。
关键词:SPCE061A单片机,角度传感器,光电传感器,PID算法.Abstract:This system takes two SPCE061A 16 bit microprocessor as the control center, one fixed on the car and another connected with keyboard and LCD handed by the controller. In this system, wireless is used to complete the two processors` communication to acquire a perfect interface between the controller and the whole control system. The car with four wheels is driven by two stepper motors, and through the angle sensitive gathering the information about the teeterboard’s equinity condition and then send to the microprocessor. The system takes the PID as main control method, through a progress of two pulse damping response, the car and the teeterboard finally reach an equinity condition.Keywords: SPCE061A microprocessor, angle sensor, light sensor, PID.1.系统方案设计1.1实现方法采用倾角传感器检测跷跷板与水平面的夹角,通过PID算法控制小车寻找平衡位置。
05电子大赛一等奖 悬挂运动控制系统

悬挂运动控制系统[05电子大赛一等奖]文章来源:凌阳科技教育推广中心作者:西安航空技术高等专科学校(李新钊胡春雷钱建松)发布时间:2006-5-29 11:28:19摘要:本系统以凌阳16位单片机SPCE061A为控制核心,通过所需运动轨迹曲线的参数方程,建立运动控制模型,按照算法对两组驱动步进电机进行控制,实现了悬挂画笔在给定的范围内的定点运动、任意曲线运动以及圆心可任意设定的圆周运动等功能,不仅完成了发挥部分要求,利用SPCE061A强大的语音处理功能,还增加了语音播放功能。
关键词:单片机运动控制模型智能算法步进电机一、方案论证根据题目的设计要求,本设计主要实现勾画设定轨迹和对设定轨迹的搜寻功能,并能实时的显示物体中画笔所在位置坐标。
其系统方案框图如图1.1所示。
为实现各模块功能,提出了几种设计方案并进行论证。
图1.1 系统方案框图1、控制器模块方案一:采用传统的51系列单片机作为系统控制器。
在本设计中,单片机的运算速度越快,运动轨迹精度越高,所以对单片机的执行速度有较高的要求;又由于本系统程序量较大,使用的I/O口资源较多,对于51来说,实现这些功能都比较困难。
方案二:采用凌阳16位单片机SPCE061A作为控制核心。
与51相比,SPCE061A具有更加丰富的资源:具有32个可编程的I/O口,14个中断源;CPU的工作时钟频率可以高达49.152MHZ,可以更好地满足本设计对数据处理速度的要求;独特的语音功能可使本系统具有更好的人机交互界面。
综上分析,选择方案二。
2、电机驱动模块在本设计中,主控制器通过对电机的步进数控制来实现物体的运动,从而作出各种运动轨迹,设计思想是将物体的运动转换为拉线的伸缩,最终将伸缩量转化为电机的步数,从便于软件设计的角度出发,采用了57BYG系列两相混合式步进电机作为被控电机,这种具有较高的控制精度,速度的可控性好,制动性强。
其驱动方案如下:采用微步进驱动模块,微步进驱动模块是由微控制器外接D/A转换器及光耦隔离电路组成的,它可以产生步进电机所需的相序脉冲。
05年电子设计大赛题论文——悬挂控制系统

作者:缑文博丁杰白博赛前辅导老师:刘远聪兰建平胡亚琦摘要本悬挂系统是以两个A T89C52为核心,用专用步进电机的驱动SJ-220驱动步进电机控制坐标图上的笔的位置,通过两个定滑轮配合步进电机,利用控制电机的转速的变化绘制出所需的图形。
利用LCD作为整个过程的显示部分,结合4×4的键盘输入,控制画图过程的输入。
一、设计方案和论证按照题意,控制系统能够通过键盘或其他方式任意设定坐标点参数;控制物体在80cm ×100cm的范围内做自行设定的运动,运动轨迹长度不小于100cm,物体在运动时能够在板上画出运动轨迹,限300s内完成;控制物体做圆心可任意设定、直径为50cm的圆周运动,限300s内完成;物体从左下角坐标原点出发,在150s内到达设定的一个坐标原点。
在此基础上,能够显示物体中画笔所在位置的坐标。
考虑到测量对象较多,如果使用一个单片机,系统资源将非常紧张,难以达到最佳的控制。
因此,采用两片单片机,合理分工,分别控制各模块的工作。
系统框图如图1所示。
对于各模块的设计,分别讨论如下。
1.电动机及其的选择(1)电动机的选择方案一:使用步进电机。
其优点在于速度易于控制,可以实现快速启停,且转动角度严格可控。
可以根据驱动脉冲电流的次数计算小车的行驶距离,省去距离测量这一环节。
步进电机的功率大,速度可调,转速稳定,可以达到精密控制。
方案二:使用直流电机,用脉冲宽度调节方法,对电机进行控制。
但此方案的缺点也很明显,直流电机动起来惯性大,转速不易控制,很难达到精确地控制,误差较大。
因此,选择方案一。
(2)电动机驱动模块所用电动机是四相电动机,需要放大4路驱动信号。
方案一:采用4路三极管放大电路驱动,该方案电路复杂,可靠性难以保证。
方案二:采用专用的步进电机驱动SJ—220, SJ-220驱动器驱动二相混合式步进电机,该驱动器采用原装进口模块,实现高频斩波,恒流驱动,具有很强的抗干扰性、高频性能好、起动频率高、控制信号与内部信号实现光电隔离、电流可选、结构简单、运行平稳、可靠性好、噪声小,带动2A以下所有的42BYG、57BYG、系列步进电机。
2005年电子大赛二等奖 凌阳SPCE061A_悬挂运动控制系统 浙江大学 卢文吉 李牡铖 陈金龙

悬挂运动控制系统(3)作者:浙江大学卢文吉李牡铖陈金龙来源:凌阳科技教育推广中心摘要:本设计采用凌阳16位单片机SPCE061A作为悬挂运动控制系统的控制核心,实现了悬挂物体的预设轨迹运动、圆周运动、到指定点运动、循迹运动等功能。
系统采用方向键盘和字符型LCM作为主要的人机接口,并以语音提示作为辅助;采用专用步进电机控制器,保证了系统精度;"米"字形排列的光电开关作为循迹传感器,实现对任意曲线的循迹。
软件上采用对轨迹进行分段取点、邻近点间逐次运动的方式对物体进行控制。
关键词:悬挂运动,步进电机,SPCE061A一、方案论证与选择根据本题要求,系统的简单方框图如图1-1所示:图1-1 系统简单方框图各个模块的作用及实现方案比较如下:1. 单片机控制模块单片机控制模块在本系统中处于核心地位。
其工作包括处理键盘输入、显示模块控制、响应传感器中断、控制电机运行等。
对单片机控制模块的基本要求是具有较高的速度、资源配置满足要求。
方案1:采用MCS-51系列单片机。
经典的MCS-51单片机功能和速度有限;而高档的MCS-51系衍生产品价格昂贵、冗余资源较多、使用范围较窄。
方案2:采用凌阳公司推出的SPCE061A单片机及其开发板--61板作为控制模块。
SPCE061A的CPU时钟为0.32MHz~49.152MHz,速度可以满足电机控制对实时性的要求,也可以满足浮点运算的要求;内置2K Words 的SRAM,为浮点运算提供了足够的数据存储器空间;具有7个触键唤醒中段和2个外部中断,可以满足本系统中键盘和传感器对外部中断的要求;SPCE061A可以通过在线调试器Probe和EZ_Probe实现在线程序下载和调试,极大地提高了开发效率。
此外使用凌阳公司提供的音频函数库和SPCE061A丰富的时基中断可以方便地实现功能扩展。
鉴于SPCE061A的以上优点,采用方案2。
2. 键盘模块键盘模块完成参数输入功能。
正弦信号发生器(基于ad9850)
正弦信号发生器[2005年电子大赛二等奖]文章来源:凌阳科技教育推广中心作者:广东工业大学陈剑栋姚健棉邱淑康发布时间:2006-5-26 9:43:28摘要:本系统设计一个正弦信号发生器,使用凌阳公司的16位单片机SPCE061A作为中央控制器,结合DDS芯片AD9850,产生0~15MHz频率可调的正弦信号,正弦信号频率设定值可断电保存;使用宽频放大技术,在50Ω负载电阻上使1K~10MHz范围内的正弦信号输出电压幅度VP-P=6V±1V;产生载波频率可设定的FM和AM信号;调制信号为1KHz的正弦波,调制信号的产生采用DDS技术,由CPLD 和Flash ROM加上DAC进行直接数字合成;二进制基带序列码由CPLD产生,在100KHz固定载波频率下进行数字键控,产生ASK,PSK信号。
系统采用全中文菜单操作方式,操作简单,快捷,且系统的精度和稳定性高。
关键字:正弦信号,DDS技术,FM模拟调频,AM模拟调幅,PSK,ASK,宽频放大。
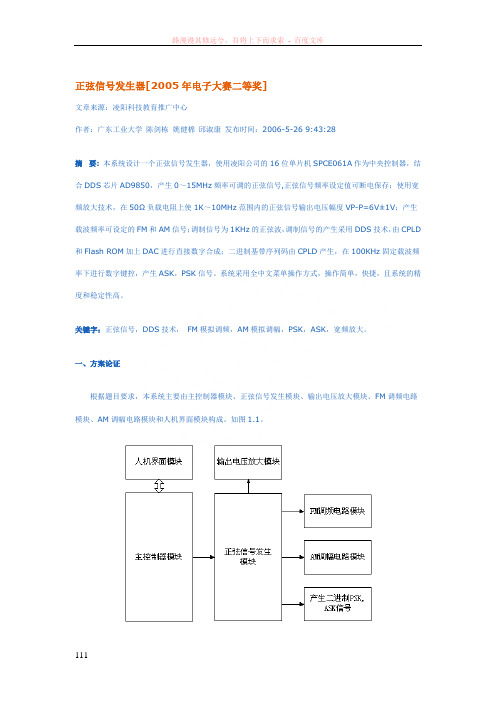
一、方案论证根据题目要求,本系统主要由主控制器模块、正弦信号发生模块、输出电压放大模块、FM调频电路模块、AM调幅电路模块和人机界面模块构成。
如图1.1。
图1.1 系统模块框图1、主控制器方案一:采用通用的51单片机AT89S52作为主控制器,完成数据处理,DDS的频率输出控制,键盘的扫描及液晶显示器的显示控制等。
由于51单片机内部的RAM和ROM都比较小,考虑到实现本系统需要大量的数据处理及液晶显示需占用大量的ROM资源等,用51单片机实现本系统就需外扩RAM和ROM,实现起来比较麻烦。
而且本系统需要用A/D转换器采样调制信号实现调频信号的输出,使用51单片机就需外扩一片A/D转换芯片,实现也比较麻烦。
而且基于整个系统的速度要求,51单片机也不能满足要求。
方案二:采用凌阳公司的16位单片机SPCE061A作为主控制器。
由于SPCE061A内置有2K字的SRAM和32K字的内存FLASH,能满足本系统数据处理及液晶显示所需数据的存储要求CPU时钟频率高达49.152MHz,能满足速度要求;集成有7通道10位电压模数转换器ADC,可以满足系统采样调制信号的要求;一片凌阳SPCE061A单片机就可以完成整个系统的主要功能,基本不需要扩展其他器件,不仅体积小而且可靠性高。
基于凌阳SPCE061A的智能家电控制系统的设计

基于凌阳SPCE061A的智能家电控制系统的设计摘要:以具有强大语音功能的凌阳spce061a单片机和西门子推出的无线通信模块tc35i作为控制核心,设计了控制系统的硬件电路和完成了相关程序编写,实现了对智能家居系统中家电系统的室内语音控制和短信息发送远程控制。
经多次实验表明该家电控制系统,安全可靠、灵活方便,具有一定的创新性和推广价值。
关键词:spce061a、智能家电、tc35iabstract: with powerful speech function of sunplus spce061a microprocessor and siemens introduced wireless communication module tc35i as control core, the design of the control system hardware circuit and complete the relevant programming, realize the intelligent household system of home appliance indoor voice control system and short messages remote control. after repeated experiments show that the home appliance control system, safe and reliable, flexibility, a certain innovation and popularize value.keywords: spce061a, intelligent household appliances, tc35i中图分类号:tb381文献标识码: a 文章编号:随着计算机和网络通信技术的发展,计算机数字化技术、现代通信技术已经融合到智能化家居中,形成了由家庭安防系统、智能家电系统和网络服务系统组成的家庭综合服务管理系统,提供了舒适、便利和快捷的高品质家居环境。
第七届(2005)悬挂运动控制系统(E题)
第七届(2005年)全国大学生电子设计竞赛作品悬挂运动控制系统(E题)毕业设计(论文)原创摘要:悬挂轨迹控制系统是一电机控制系统,控制物体在80cm×100cm的范围内作直线、圆、寻迹等运动,并且在运动时能显示运动物体的坐标。
设计采用AT89S51单片机作为核心器件实现对物体运动轨迹的自动控制,通过多圈电位器实现对悬挂物位置的精确测量,并引入局部闭环反馈控制环节对误差进行修正。
以达到对物体的控制和对坐标点的准确定位。
采用脉冲宽度调制技术控制直流电机驱动芯片L298,以实现对电机的转速、转向、启停等多种工作状态进行快速而准确的控制。
采用红外光电传感器实现检测电机速度和画板上黑色曲线轨迹。
关键词:运动轨迹;多圈电位器;脉冲宽度调制;红外反射光电传感;直流电机驱动ABSTRACT:Hang trajectory control system is a motor control system, object make linear, circle, searching locus and etc locomotion within the range of the 80cm×100cm, while movement system can display the coordinate of the object. Adopt AT89S51 MCU as the main part to realize the automatic control of the object motion locus in this design, system using multiturn potentiometer to measure the position of object, and introduces local closed-loop feedback control system link to correct error, in that case system can improve the accuracy of control and orientation. In this design system also adopt PWM technique control DC motor drive chip L298 to realize the accurate control of motor rotation speed, rotation direction, Start, Stop and etc operating position. System adopt infrared photosensor measure motor rotation speed and drawing locus by black curve on the palette.KEY WORDS:sport trajectory;loopy potentiometer;PWM;infrared photosensor;DC motor driving第1章引言运动控制是自动化技术的重要组成部分,是机器人等高技术领域的技术基础,已取得了广泛的工程应用。
凌阳SPCE061A超声波倒车雷达开题报告

中国地质大学(武汉)机械与电子信息学院电子信息工程系毕业设计开题报告学生姓名:刘培权指导老师:胡志敏开题时间:2011年02月29日课题名称超声波倒车雷达撰写提纲:1)研究意义及背景;2)拟采用的方案;3)拟解决的主要问题一、研究意义及背景随着社会经济发展,汽车逐渐普及进入寻常百姓家庭,行车安全也成了各个车主最关心的问题。
驾驶员在行车过程中,需要密切关注路况及周围障碍,后视镜虽然给了驾驶员很大的帮助,但还是存在一定的视野死角,在泊车时这个问题表现得尤为突出。
为弥补这一缺陷,加装倒车雷达成了许多车主的选择。
倒车雷达,可以使泊车更轻松。
倒车雷达又称泊车辅助系统,是汽车泊车安全辅助装置,能以声音或者更为直观的显示告知驾驶员周围障碍物的情况。
超声波倒车雷达,采用超声波测距原理,一般由超声波传感器、控制器和显示器等部分组成。
驾驶者在倒车时,启动倒车雷达,在控制器的控制下,由装置于车尾的探头发送超声波,遇到障碍物,产生回波信号,传感器接收到回波信号后经控制器进行数据处理,判断出障碍物的位置,由显示器显示距离并发出警示信号,从面使驾驶者倒车时做到心中有数,使倒车变得轻松自如。
二、拟采用的方案1、方案概述选用spec061A单片机,利用其具备的单芯片语音功能,串接三个超声波测距模组,组成一个超声波测距倒车雷达系统。
2、设计要求:a)可以语音提示0.35-1.5m范围内的障碍物;b)利用3个LED二极管表示三个传感器范围是否有障碍物,障碍物越近,LED闪烁频率越高。
3、技术方案a)硬件设计:系统以spec061A单片机为核心,选用凌阳科技教育推广中心的spec061A 精简开发板,三个超声波测距模组依次排布,组成线阵的传感器阵列;另外,接有一块CD4052模拟开关制作的转接板,发光二极管显示模块。
系统组成如图:b)软件设计:根据系统工作的主要流程是在不断地对三组超声波沿距模组进行测距操作,并将第次测距的结果进行处理,心更新对就的LED显示频率设置,心及在符合要求的条件下进行语音提示播报,系统主程序流程图如下所示:程序运行时,系统先调用初始化函数,初始化系统设置及超声波测距设置,再调用测距函数进行一次测距操作,函数返回测量结果。
山东省电子设计大赛E题1

杨济民教授点评:该作品采用凌阳16位单片机SPCE061A作为控制核心,待测信号经过放大、A/D转换进入单片机,由液晶显示测量结果,结果显示清晰,人机界面友好。
采用AD9854来实现正弦波形产生,频率范围宽,输出的正弦信号精度高、稳定性好,可同时输出各种调制信号。
该作品功能齐全,报告格式完整,元器件选择合理,工作稳定,测量结果准确,较好地实现了题目要求,是一个优秀的参赛作品。
缺点是自动量程转换功能实现的不好。
摘要:本系统分电压测量和信号产生输出两大部分,电压测量部分以模拟电路为主,配合放大模块、A/D转化模块、显示模块;通过凌阳单片机进行数据处理,在误差允许范围内显示测量电压值。
信号产生以直接数字式频率合成器(Direct Digital Frequency Synthesis,简称DDS或DDFS)为核心,经过AT89S52对DDS芯片内部进行控制,使之输出标准正弦波形,利用编程实现频率预置、步进,达到电压输出频率的可调节步进。
通过调试与测量完成了题目的基本部分和全部发挥部分的要求并有自己的创新。
简易数字显示交流毫伏表烟台大学刘计平秦庆磊石伟光关键词:SPCE061A单片机,AT89S52单片机,毫伏表,频率合成器Abstract:This system consists of the parts of the voltage measurement and the signal generation output. The voltage measurement mainly focuses on analog electric circuit, with using amplifier module, A/D conversion module and displaying module. In the certain range where errors are allowed to deal with data through SPCE061A microcontroller, the signal generation regards direct Digital Frequency, or DDS/DDFS as the centre, which is controlled by AT89S52 to output sine waveform. Then it can set up frequency and step to adjust the step of voltage output frequency. Through to debugging and measure the system performs the basic and expanding demands .we have some addition innovation.Keywords:SPCE061A ,AT89S52 ,millivoltmeter , DDS正文 (2)1、系统方案选择和论证 (3)1.1 基本方案论证 (3)1.1.1测量部分方案选择 (3)1.1.2输出部分中各模块的方案选择 (3)1.1.3最终方案设计思想及框架示意图 (4) (4)1.2总体设计方案 (4)2、系统的硬件设计与实现(单元电路设计) (5)2.1 系统硬件的主要组成部分与理论分析计算 (5)2.1.1本系统硬件部分主要有: (5)2.1.2理论分析与公式计算 (6)2.2 系统各模块单元的理论分析与实际电路设计 (6)2.2.1测量部分 (6)2.2.2输出部分 (9)2.2.3毫伏表的基本电路部分 (12)2.2.4稳压电源部分电路设计 (13)2.2.5外围辅助电路 (13)3、系统的软件设计 (14)3.1主流程图 (14)3.2软件子流程图 (15)3.2.1测量部分 (15)3.2.2输出部分软件流程图 (16)4、调试(系统测试)过程 (17)4.1测试仪器与设备 (17)4.2测试过程 (17)4.2.1分模块调试: (18)4.2.2整机系统调试: (18)4.3结果分析 (18)4.3.1测试数据: (18)4.3.2测试数据分析: (19)4.3.3误差分析 (20)4.4创新与发挥 (21)5、总结 (21)结束语 (22)参考文献 (23)附录: (24)附录1、元器件明细表 (24)附录2、PCB印制电路板图 (24)附录3 部分程序清单 (26)正文1、基本要求(1)电压测量a、测量电压的频率范围100Hz~500KHz。
全国大学生电子设计竞赛用SPCE061A实现的简易智能电动车
全国大学生电子设计竞赛用SPCE061A实现的简易智能电动
车
羚阳
【期刊名称】《电子世界》
【年(卷),期】2003(000)012
【摘要】@@ 设计并制作一个简易智能电动车,设计功能及要求见本刊第10期,其行驶路线示意图如图1.rn1.方案设计与论证rn采用凌阳公司16位单片机SPCE061A做核心控制.
【总页数】1页(P40)
【作者】羚阳
【作者单位】无
【正文语种】中文
【中图分类】TP3
【相关文献】
1.2003年全国大学生电子设计竞赛一等奖简易智能电动车(E题) [J], 孟凡伟;蒋林明;孙学彬;牟世堂;金波;王尚军
2.2003年全国大学生电子设计竞赛一等奖简易智能电动车(E题) [J], 常玉保;杨春晖;刘崇杰;吴振宇
3.基于Sunplus SPCE061A控制核心的电动车跷跷板设计及实现 [J], 张志强;陈丹;程道来;仪垂杰
4.基于 SPCE061A 智能语音遥控器的设计与实现 [J], 张颖颖
5.基于SPCE061A的智能消防电动车设计 [J], 吴凌燕;李振伟;吴天静
因版权原因,仅展示原文概要,查看原文内容请购买。
2005年全国大学生电子设计竞赛国家奖作品集锦(山东赛区)
三
中国海洋大学-1
国家一等奖
1名
E题
《悬挂运动控制系统》
刘滨
纪风磊 王北镇 郭志强
作品介绍
本系统以解析几何坐标运算为基础,采用凌阳SPCE061A单片机控制两台高精度步进电机运动。系统配有键盘输入和LCD液晶显示,采用了单片机通讯技术,实现了强大的语音播报功能。采用优化的解析几何算法,使系统达到了高精度和高执行速度。通过测验,系统完全达到了题目的所有要求,并扩展了若干功能。
著作及自编教材10部,公开出版4部,学院出版6部:《电子技术实验教程》2004版电子工业出版社;《高频电子线路》2001版国防工业出版社;《复印机使用与维修》和《手机使用与维修》,2000版,新时代出版社;《综合电子线路实践》2000版学院教材;《电工电子实验技术》2002版学院教材;《电工电子虚拟实验技术》上下册,2002版学院教材;《综合电子线路实践》2004版学院教材;《电子系统设计》2004版学院教材。
获
奖
感
言
李芳
2005年我们使用凌阳“61板”参加了 “索尼杯”全国大学生电子设计竞赛。在平时训练和参赛过程中,我深深地体会到凌阳“61板”的精妙之处,真可谓‘麻雀虽小,五脏俱全’。从外型上看“61板”小巧精致剔透,设计简便实用,结构设计合理,操作方便灵活;在硬件接线上简单且易于查找连线错误的。此外,凌阳“61板”非常好地发挥了单片机的特色功效,性能可靠稳定,出错率低。凌阳“61板”堪称完美的单片机最小应用系统。
报告设计:文字编排合理有序、文笔流畅、层次分明、条理清晰;语句简明扼要、逻辑性强、重点突出;图例正确整洁美观,质量较高。理论分析、计算正确有据。
用凌阳SPCE061A实现的液体点滴速度监控装置
用凌阳SPCE061A实现的液体点滴速度监控装置2003年全国大学生电子设计竞赛已经结束。
本文介绍竞赛的F题。
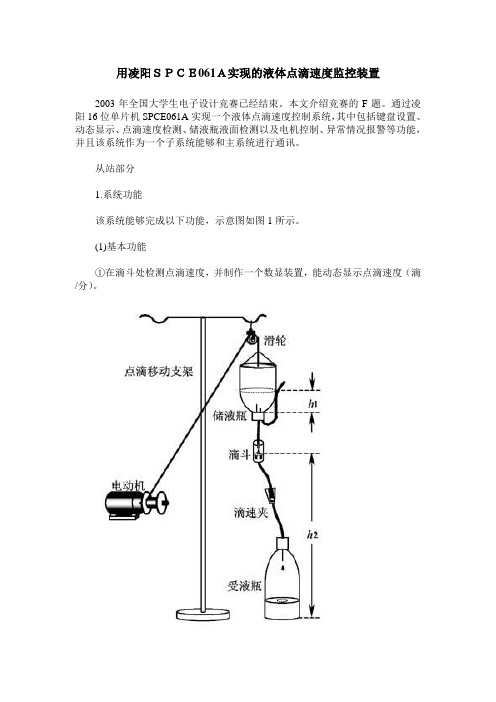
通过凌阳16位单片机SPCE061A实现一个液体点滴速度控制系统,其中包括键盘设置、动态显示、点滴速度检测、储液瓶液面检测以及电机控制、异常情况报警等功能,并且该系统作为一个子系统能够和主系统进行通讯。
从站部分1.系统功能该系统能够完成以下功能,示意图如图1所示。
(1)基本功能①在滴斗处检测点滴速度,并制作一个数显装置,能动态显示点滴速度(滴/分)。
②通过改变h2控制点滴速度,如图1所示;点滴速度可用键盘设定并显示,设定范围为10~200(滴/分),控制误差范围为设定值10%1滴。
③调整时间≤3分钟(从改变设定值起到点滴速度基本稳定,能人工读出数据为止)。
④当h1降到警戒值(2~3cm)时,能发出报警信号。
(2)扩展功能①能输出从站号、点滴速度和报警信号;从站号和点滴速度可以任意设定。
②接收主站设定的点滴速度信息并显示。
2.方案设计与论证(1)点滴速度检测可以选择红外发射检测的原理来实现,我们可以在滴斗壁的一端安装一个红外发射传感器,另一端来接收,当有水滴滴下时,传感器会产生一个跳变信号,通过该信号来计算点滴滴下的数目,以此计算出点滴的速度(滴/分),这里用到的传感器是一种光电开关传感器俗名“15mm”,不需要外接任何电路,三根连线分别是:5V、GND和OUT,使用非常方便。
当电源和地连接好后,可以将输出直接接一个发光二极管,用手在发射和接收之间穿过,就可以看到二极管会亮灭一次。
(2)储液检测电路可以通过两根单芯电缆线插入储液瓶口内2~3cm处,一端连接5V的电源,另一端接I/O口,并连接一个下拉电阻到地,当液面高于瓶内导体时I/O口为高电平,否则为低电平,参见图2。
需要注意的是,深入水中的两根线一定要注意绝缘好,不能让水沿着线流入电源和I/O口。
(3)电机控制电路该电路是用来改变h2高度,以此控制点滴的速度,这里我们选用的是永磁异步四相8拍的步进电机,型号为42BYG228,根据电机的正转和反转来控制储液瓶的高度。
基于凌阳16位单片机SPCE061A悬挂运动控制系统

基于凌阳16位单片机SPCE061A悬挂运动控制系统
贡雪梅;李新钊;胡春雷;钱建松
【期刊名称】《西安航空技术高等专科学校学报》
【年(卷),期】2007(025)001
【摘要】以凌阳16位单片机SPCE061A为控制核心,通过所需运动轨迹曲线的参数方程建立运动控制模型,按照算法对两组驱动步进电机进行控制,实现了悬挂画笔在给定的范围内的定点运动、任意曲线运动以及圆心可任意设定的圆周运动等功能,不仅完成了要求发挥的部分功能,同时还增加了语音播放功能.
【总页数】4页(P14-17)
【作者】贡雪梅;李新钊;胡春雷;钱建松
【作者单位】西安航空技术高等专科学校,实验实训中心,陕西,西安,710077;西安航空技术高等专科学校,实验实训中心,陕西,西安,710077;西安航空技术高等专科学校,实验实训中心,陕西,西安,710077;西安航空技术高等专科学校,实验实训中心,陕西,西安,710077
【正文语种】中文
【中图分类】TP273
【相关文献】
1.基于凌阳SPCE061A单片机的语音导引系统的设计与总结报告 [J], 余彦霖
2.凌阳16位单片机SPCE061A的最小系统及开发 [J], 赵世强;荆炳礼;赵满
3.基于凌阳SPCE061A单片机的红外传输控制系统 [J], 王伟;叶德文;苏雄伟;段磊
4.基于凌阳SPCE061A单片机智能小车的设计 [J], 冉伟刚
5.凌阳科技-大学计划暨凌阳16位单片机十省市技术研讨会邀请函 [J],
因版权原因,仅展示原文概要,查看原文内容请购买。
电子大赛二等奖 悬挂运动控制系统

悬挂运动控制系统[2005年电子大赛二等奖]文章来源:凌阳科技教育推广中心作者:广西师范大学黄钦宁李树海莫琼华发布时间:2006-8-30 11:43:34摘要:本系统采用凌阳16位单片机SPCE061A作为控制中心,由直流步进电机、红外收发对管、4*4键盘及中文液晶显示屏构成的悬挂运动控制系统。
该系统能自由控制悬挂物体完成自行设定运动、画圆运动、沿黑线运动等,并能正确显示物体到达的坐标位置。
关键词:SPCE061A单片机中文液晶显示屏逼近画圆算法一、方案的选择与论证1、单片机选择方案一:采用传统的8位89C51单片机作为运动物体的控制中心。
51 单片机具有价格低廉,使用简单等特点,但其运算速度低,功能单一,RAM、ROM空间小等缺点。
本题目在确定圆周坐标值时,需要进行大量的浮点数运算,若采用89C51需要做RAM,ROM来扩展其内存空间,其硬件工作量必然大大增多。
方案二:采用16位单片机SPCE061A作为运动物体的控制中心。
SPCE061A具有丰富的资源:RAM,ROM空间大、指令周期短、运算速度快、低功耗、低电压、可编程音频处理,易于编写和调试等优点。
尤其在复杂的数学运算,其运算速度快,精度高,在控制步进电机时运行速度比一般51单片机快。
基于上述分析,拟选择方案二。
2、电动机选择方案一:用步进电机实现物体的精确定位和方向控制。
步进电机是一种脉冲控制电机,它是一种能将脉冲信号转换为角位移的数模转换器,可广泛用于无需反馈控制但要求有精确位置的场合。
方案二:采用带旋转编码器控制直流电机,电机运转平稳,精度可以得到保证。
但其驱动电路复杂,在短时间内难与实现。
在本题中因考虑到控制画笔画图准确性和电路的复杂性,拟选择选用方案一,并采用控制性能高的步进电机来控制运动物体。
3、控制物体运动算法方案一:直线插补法。
直线插补法是在绘图系统中常用的一种逐点比较算法。
它的原理是:执行机构每走一步,都要和给定轨迹上的坐标值进行一次比较,看当前位置和轨迹位置的关系,从而确定下一步的进给方向。
基于凌阳SPCE061A单片机的红外传输控制系统

基于凌阳SPCE061A单片机的红外传输控制系统王伟;叶德文;苏雄伟;段磊【摘要】Infrared anti interference ability, and will not interfere with the radio equipment around the radio,while the infrared emission receiving range is narrow,higher security.This paper adopts SPCE061A single chip microcomputer to design the remote control system.The remote control device has the advantages of flexible programming,wide control range,small size,low power consumption,high cost,low cost and high reliability.%红外线抗干扰能力强,且不会对周围的无线电设备产生干扰电波,同时红外发射接收范围窄,安全性较高.本文采用凌阳SPCE061A单片机进行遥控系统的应用设计,遥控装置将同时具有编程灵活、控制范围广、体积小、功耗低、功能强、成本低、可靠性高等特点,采用单片机的红外遥控技术具有广阔的发展前景.【期刊名称】《电子测试》【年(卷),期】2015(000)021【总页数】3页(P54-56)【关键词】传输控制系统;红外线传输;凌阳SPCE061A【作者】王伟;叶德文;苏雄伟;段磊【作者单位】南京医科大学生物医学工程系,南京,210029;南京医科大学生物医学工程系,南京,210029;南京医科大学生物医学工程系,南京,210029;南京医科大学生物医学工程系,南京,210029【正文语种】中文传统的遥控器大多数采用了无线电遥控技术,但是随着科技的进步,红外线遥控技术的成熟,红外也成为了一种被广泛应用的通信和遥控手段。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
悬挂运动控制系统(6)作者:江苏大学张寿龙田兆垒赵生禄来源:凌阳科技教育推广中心录入:随风字体:摘要:本系统以凌阳SPCE061A单片机为控制核心,采用L298芯片作为两只步进电机的驱动模块,利用1×4键盘完成对相关参数的设定,采用液晶显示器显示参数信息,采用1个反射式光电传感器来检测板上所标黑线的位置;使用了一套精确的软件算法,有效地实现了两路电机的配合转动,使得悬挂物体能够按照几种不同的设定路径准确移动,完成题目的各项要求。
一、方案论证1、单片机的选择方案一:采用89C51单片机实现,单片机软件编程自由度大,可用编程实现各种控制算法和逻辑控制。
但是89C51需外接模数转换器来满足数据采样,硬件电路相对复杂。
另外,51单片机在线操作不易掌握,需要用仿真器来实现软硬件调试,较为繁琐。
方案二:采用凌阳SPCE061A单片机实现,该单片机内部资源丰富,集成了A/D,D/A,易于数据的采集,同时由于其在线仿真技术,软硬件调试方便,对于电子设计竞赛这种时间紧,任务多的开发来说是极为有利的。
基于上述分析,我们拟选择方案二。
2、电机的选择方案一:采用直流电机控制悬挂物体的运动,直流电机力量大,能获得较大的启动转矩,转动速度快,但由于存在机械触点,直流电机容易产生噪声,而且单独使用时不能完成位置控制,需要配以传感器才能控制定位。
方案二:采用步进电机控制悬挂物体的准确运动,步进电机不需要使用传感器就能精确定位,而且通过给定的脉冲周期,能够以任意速度转动,定距运动较精确。
虽然步进电机不能高速转动,但根据题目要求的时间和移动距离,步进电机完全能够符合要求,是该种要求下广泛使用的一种电机。
基于上述理论分析,我们拟选择方案二。
3、黑线检测模块选择检测板上黑线的基本原理是:光线照射到板上并反射,由于黑线和白纸的反系数不同,根据接收到的反射光强弱判断是否黑线。
方案一:可见光发光二极管与光敏二极管组成的发射-接收电路。
这种方案的缺点在于其他环境光源会对光敏二极管的工作产生很大干扰,一旦外界光亮条件改变,很可能造成误判和漏判,即使是采用超高亮发光二极管可以降低一定的干扰,但这将增加额外的功率损耗。
方案二:脉冲调制的反射式红外发射-接收器。
采用带有交流分量的调制信号,可以大幅的减少环境光源的直流分量的干扰,但由于该红外发射管的最大工作电流取决于平均电流,该最大电流需要通过调节占空比来调节;而且需要添加额外的电路和程序,本题中并不需要很大的电流,故不需要采用该管子。
方案三:不调制的反射式红外发射-接收器。
由于采用红外管代替普通可见光管,可以有效的降低环境光源的干扰,尺寸小、质量轻、灵敏度高,对辅助装置的要求最少,对人眼无伤害,采用不调制的反射式红外发射-接收器完全可以有效的降低干扰,而且方便可行,能够准确的实施检测。
基于上述考虑,我们决定采用方案三。
4、电源的选择方案一:所有器件都采用单一电源。
这样供电虽然比较简单,但是由于电动机启动瞬间电流很大,而且给定脉冲信号驱动的电机电流波动较大,会造成电压不稳、有毛刺等干扰,对单片机系统造成严重的干扰,缺点十分明显。
方案二:双电源供电。
将电机驱动电源(12V)和单片机的供电电源(5V)完全隔开,这样设计可以彻底消除电机驱动所造成的干扰,提高了系统的稳定性。
基于上述考虑,所以我们选择方案二。
5、显示的选择方案一:用LED数码管显示设定的坐标,本题中只需要六只LED数码管进行动态显示即可以显示X轴和Y轴的坐标,优点是接口简单,易于控制,缺点是只能用于比较简单的数字显示。
方案二:用LCD液晶显示器显示,优点是能显示更多的字符,有着良好的人机界面,缺点是控制比较复杂。
由于凌阳SPCE061A单片机有着丰富的硬件资源,加上现代社会的发展对人机界面的要求越来越高。
基于上述考虑,所以我们选择方案二。
二、详细软硬件设计根据题目要求和上述论证,本系统的系统框图如图2.1。
图 2.1 系统结构框图总体设计方案的硬件连接图如图2.2所示。
图2.2 硬件连接图1、硬件设计(1)单片机最小系统由凌阳单片机SPCE061A及键盘和LCD显示器组成。
SPCE061A 是凌阳科技推出的一款16位结构的μ'nSP系列微控制器。
SPCE061A里内嵌32K字的闪存(Flash),较高的处理速度使μ'nSP能够非常容易地、快速地处理复杂的数字信号。
SPCE061A单片机内置8路ADC,2路DAC,且集成开发环境中,配有很多语音播放API函数,用SPCE061A实现语音播放极为方便。
另外,该芯片内置在线仿真、编程接口,可以方便实现在线调试。
考虑到本题目所应用的复杂程度和系统资源的分配,采用最简单的直接1×4键盘数据输入端口。
显示模块用的是OCM4X8C液晶显示器,它是128×64点阵的汉字图形型液晶显示模块,可显示汉字及图形,内置国标GB2312码简体中文字库(16×16点阵)、128个字符(8×16点阵)及64×256点阵显示RAM(GDRAM)。
具有多种功能:光标显示、画面移位、睡眠模式等。
界面比较丰富,人机操作更直观。
其外接接口可直接与CPU连接,提供两种方式来连接微处理机:8-位并行方式和串行方式。
串行进行数据传输,可以节省单片机资源。
本系统中就用了串行方式。
(2)步进电机驱动模块电路的实现系统中选用二相四拍步进电机,L298N(用于输入标准TTL逻辑电平、输出电压、电流要求比较高的驱动电路,诸如继电器、电磁阀、DC或步进电动机等设备中)作为双桥驱动器件。
每次绕组受到激励,电动机轴就旋转一圈的几分之一。
为使其正确的旋转,绕组必须按正确的顺序受到激励。
若励磁信号正向传送,则步进电机正转;励磁信号反向传送,则步进电机反转。
由脉冲信号控制电动机,故调节脉冲信号的频率便可改变步进电机的转速。
L298N内电路如图2.3。
图 2.3 L298N内电路由电路可知,二相四拍电动机的励磁方式输入如表2.1。
表2.1 二相四拍电动机的励磁方式输入利用单片机很容易满足步进电机的工作条件,且容易控制。
电路连接见图2.4。
图2.4 L298N的电路连接(3)光电检测模块的电路设计与实现为了检测板上黑线的位置,在悬挂物体中心上固定一个反射式红外发射-接收器。
具体电路如图2.5所示。
图2.5 反射式红外发射-接收器电路发射部分采用红外发射管,实现检测系统信号的输出。
接收部分的光敏二极管在不同的的光照强度下,电阻值会大幅改变。
本实验中,我们把电路参数设置为只对黑色敏感。
当检测不到黑线时,发射管发出的红外光经板面反射后被接收管接收,接收管导通,斯密特管输出低电平,当检测到黑线时,发射管发出的红外光不能被反射,斯密特管输出高电平,单片机通过检测I/O口的高低电平来判断电机的运动方向。
由于是采用四个方向的同时检测,故单片机的判断能力就明显提高,缩短了检测判断时间,同时也增强了纠错能力。
2、软件设计(1)主程序要完成上述任务,并且控制的比较准确,实现的算法很重要。
尤其是悬挂物体从一个位置坐标运动到另一个位置坐标的算法,是实现任务的基础。
按照题目要求在100cm×80cm的图上定出各个点的坐标,现在以左下角为坐标原点,以一厘米为一个单位,标出横轴和纵轴的数据,如图2.6。
图2.6 图板示意用x和y来表示坐标的位置,用l表示左边的绳子的长度,用r表示右边的绳子的长度(注意:我们这里的长度是指悬线与滑轮的触点和图中任一点(x,y)间的直线距离)。
x和y与l和r的关系函数如下:现在我们来计算出相应的电机转动的拍数。
设初始位置坐标为(x1,y1),目标位置为(x2,y2)时,△l和△r为l和r的微小变量:通过△l和△r的变化,就可以控制电机的转动拍数,进而控制物体的移动。
根据圆周的数学关系,要使悬物左右相应移动△l、△r,则左右两电机需转动过的角度为:又知我们采用的二相四拍步进电机,每一步进为1.8°,则得到左右两个电机需转动的拍数为:由此我们就可以根据上面的计算来控制电机输出脉冲,驱动电机以一定的步进节拍运转,拖动悬挂物体从初始位置运动到目标位置了。
本系统外围电路比较简单,但是软件设计相对较复杂。
既要考虑系统完成任务的具体执行,又要考虑总体组成的易于实现性。
从软件的功能方面看,主程序主要完成坐标设置,键盘的扫描及其显示,相应任务子程序模块的调用等。
其流程图如图2.7。
图2.7 主程序程序流程图在发挥部分(1)中,要求能够显示物体中画笔所在位置的坐标。
本系统主模块中把此项功能独立出去,放在坐标计算后,直接输出并在LCD显示。
这样就与任务子程序的调用分离开来,易于实现。
(2)定点运动程序定点运动中不需要关心悬挂物体在运行过程中的轨迹,只考虑原点与设定点之间的距离,根据这一距离,利用公式直接计算出左右两根绳子最终应该收放的相对距离,根据这一距离控制电机的转数。
则基于原点坐标(0,0),设定坐标(x,y),和两边的绳子的长度的函数关系为:设定点左右绳长,原点左右绳长,左右电机运线所需差值,其步进角度为,代入电机步进单位1.8°,得左右电机步进拍数,其实现程序流程图如图2.8所示。
图2.8 定点运动程序流程图(3)自定义轨迹程序在自定义轨迹模块中需要让悬挂物体沿任意设定形状的一条曲线来运行。
在该模块中,设定的曲线是一条一个周期的正弦波,该正弦波的波长是72cm,从(0,25)沿轨迹走到(72,25),幅值为20cm。
其基本原理是在程序中预先设计一个正弦波坐标表格,表中放置72个数据,基本可以达到精度要求。
正弦波初始点坐标(0,20),则所行轨迹上各点(x,y)坐标为:其中k为0,1,2,3, (72)依次计算k=0,k=1,k=2,……,直到k=72所对应的(x,y)坐标值数据。
系统运行时,单片机每控制电机拖动悬挂物体到一个位置前,会先查正弦波表,将查表得到的坐标结果按照定点运动模块的算法算出左右两线与上一个位置的长度差,以及各个电机所需转动的角度和拍数。
这样从微观上看还是从一个点运动到另一个点,从宏观上看就是一个连续的正弦波形图了。
选取的取样点越多,运动的轨迹就越精确。
程序流程图如图2.9所示。
图2.9 自定轨迹程序流程图(3)圆形轨迹运动模块与(2)相似,要让电机控制悬挂物体走圆形轨迹,只要在程序中建立一张圆形轨迹坐标表,单片机在运行中不断去查表,以获得下一步的位置坐标。
本程序中以半径R,圆心(xc,yc)(运行前设置)为参考点,为满足精确度,共设定取样点为N个,算出每一个点(x,y)的横坐标和纵坐标。
则坐标计算公式为:其中BI为角度值(单位弧度),为Nπ/45。
代入预定数值:R=25cm,N=(1,2,……90),BI取值为π/45,2π/45,3π/45,……,90π/45。