2015年新时达机器人介绍(V9.0--20151207终端用户版)
新时达机器人系统说明书.
5.1.4点动运行(53
5.1.5机械终端限位(53
5.1.6软件限位开关(53
5.2相关人员(53
5.2.1操作人员资格要求(54
5.2.2设备操作规程的规定(54
5.3培训(54
5.4安全措施(55
5.5检查(56
1机器人系统
1.1机器人组成
1机器人
2机器人控制柜
图1. 3机器人各轴说明
图1. 4 SA1400机器人各关节运动示意图1.2.3各关节电机说明
图1. 5 1,2,3,4轴电机位置示意图
图1. 6 5,6轴电机在内部
1.2.4各轴机械零点说明
图1. 7一轴零点二轴零点
图1. 8三轴零点四轴零点
图1. 9五轴零点六轴零点可随意定
1.2.5机器人铭牌
图1. 10机器人铭牌位置图
1控制器及其安装板
2伺服驱动及其安装板
3电力安装板1
4断路器及其安装板
5接触器
6开关电源
7主电端子8控制电端子
9控制柜斜面板(可定制
图1. 13 SRC2控制柜内部示意图
1.3.3控制柜背面说明
下图是控制柜SRC2的背面结构示意图。
1示教器及其支架
2风扇及其安装板
3电力安装板2
4滤波器
5制动电阻(选配
2.2 STEP伺服说明(21
2.3安全逻辑板说明(27
2.4柜冷却装置说明(28
2.5 I/O模块(28
2.6软件功能介绍(29
3机器人标定和性能测试(30
3.1.1标定工具DynCal (30
3.1.2标定过程(30
3.2机器人性能测试(30
3.2.1性能测试工具CompuGauge (31
上海新时达电气有限公司智能型全串行电梯控制(3100R2)
上海新时达电气有限公司智能型全串行电梯控制系统SM-ICM-C 本手册对SmartComII 电梯串行通讯系统中SM-ICM-C 型电梯专用控制系统的调试进行了全面系统的阐述希望她能给电梯现场调试人员提供一点帮助对书中的错误和不足的地方敬请指教上海新时达电气有限公司调试手册- 3 - STEP®前言内容提要读者对象编辑目录第一章规格定义第一节主板规格定义 51 1 有罩壳型主板外型51 2 无罩壳型主板外型51 3 输入接口定义61 4 输出接口定义61 5 连接方法61 5 1 电源连接61 52 通讯连接71 5 3 并联群控通讯连接71 5 4 高速计口连接7第二节轿厢板指令板规格定义72 1 轿厢板接口定义72 2 轿厢板连接方法92 2 1 轿厢板与电源和通讯总线的连接92 2 2 开关门及指令按钮的连接9第三节显示板仅以SM-04-VRA 为例93 1 接口定义93 2 显示板连接方法10第二章慢车调试11第一节运行前的确认和检查111 1 现场机械装配确认111 2 电气装配确认111 3 编码器装配的确认121 4 通电前电源的检查12感谢使用上海新时达电气有限公司智能型全串行电梯控制系统SM-ICM-C 本手册对SmartComII 电梯串行通讯系统中SM-ICM-C 型电梯专用控制系统的调试进行了全面系统的阐述希望她能给电梯现场调试人员提供一点帮助对书中的错误和不足的地方敬请指教用户工程调试人员用户技术支援人员主编毛旭编委沈辉忠董恩源蔡亮胡志涛毛旭审核蔡亮胡志涛上海新时达电气有限公司调试手册- 4 - STEP®1 5 通电后电源相关部分的检查131 6 主板的相关检查13第二节系统和变频器参数设置131 用液晶操作器检查SM-Std 主板上的主要参数设置132 变频器的参数设置14第三节主机整定151 使用安川变频器型号616G5 的主机整定152 使用富士变频器FRENIC5000G11UD 的主机整定18第四节机房检修运行18第五节轿顶检修操作19第三章快车调试20第一节运行前的确认和检查201 1 现场机械装配的确认201 2 现场电气装配的确认20第二节电梯外围各部件检查21第三节系统参数设置233 1 SM-Std 主板参考参数一览233 2 SM-Std 输入输出信号设置表233 3 SM-Std 板F 参数菜单表24第四节模拟速度指令系统的调试254 1 井道位置自学习254 2 试运行` 254 3 运行舒适感调整26第五节井道串行通讯系统的调试27第六节平层精调281 平层偏移量的确定282 平层精调29第七节并联功能的调试29第八节群控功能的调试29第四章常见问题及故障处理304 1 故障代码及解决方案304 2 电梯其它常见故障及解决方案31第五章变频器参数说明331 串行控制安川变频器参数VS616G5 676GL5 332 串行控制富士变频器参数FUJIG11UD 35上海新时达电气有限公司调试手册- 5 - STEP®第一章规格定义第一节主板规格定义1 1 有罩壳型主板外型接线端子为Y5GND COM1 Y1 Y3 Y4AC-L AC-N Y0 Y2 COM2Y6 COM3 Y9 G24 X1 X3 X5Y7 Y8 G24 X0 X2 X4X7 X9 X11 X13 X15 X17 V2X6 X8 X10 X12 X14 X16 V1V30V输入输出LEDX4X8 X9 X12X0 X1X10 X11X2 X3 X7X13 X14 X15X5 X6Y5Y0 Y3Y6 Y7Y1 Y2Y8 Y9Y41 2 无罩壳型主板外型接线端子为输入输出LEDX0 X1 X2 X3 X4 X5 X6 X7X8 X9 X10 X11 X12 X13 X14 X15X16X17Y0 Y1 Y2 Y3 Y4Y5 Y6 Y7 Y8 Y9上海新时达电气有限公司调试手册- 6 - STEP® 1 3 输入接口定义端口号JP6定义类型端口号JP6 定义类型X0 19自动/检修开关常开 X9 28 门锁回路常开X1 20 上行按钮常开 X10 29 安全回路常开X2 21 下行按钮常开 X11 30上平层开关常开X3 22门锁继电器检测常开 X12 31下平层开关常开X4 23抱闸接触器检测常开 X13 32调速器出错常开X5 24上行限位开关常闭 X14 33 消防常开X6 25下行限位开关常闭 X15 34变频输出接触器检测常开X7 26上行单层终端减速开关常闭 X16* 35上行多层终端减速开关常闭X8 27下行单层终端减速开关常闭 X17* 36下行多层终端减速开关常闭X16* X17*如果现场安装了多层减速开关请正确设置X16 X17 的输入类型如果现场没有安装请都设置为常开1 4 输出接口定义端口号JP6 定义 LEDY0 5 抱闸接触器Y0Y1 6抱闸强激接触器Y1Y2 7 主接触器Y2Y3 8 辅助接触器Y3Y4 10 上行信号Y4Y5 11 下行信号Y5Y6 12 运行使能Y6Y7 13 备用Y7Y8 15 开门继电器Y8Y9 16 关门继电器Y91 5 连接方法1 5 1 电源连接上海新时达电气有限公司调试手册- 7 - STEP® 1 5 2 通讯连接9孔D型插头双绞线接至出线桩头CAN1(JP2)接插件1 5 3 并联群控通讯连接C A N 2 ( J P 3 )接插件9孔D型插头C A N 2 ( J P3 ) 接插件9孔D型插头双绞线1 5 4 高速计数口连接9针D型插头四芯屏蔽线Coder(JP4)接插件第二节轿厢板指令板规格定义2 1 轿厢板接口定义插座号端子号类型定义01 Output 输出TY0, 上到站钟02 Output 输出TY0, 上到站钟03 Output 输出TY1, 下到站钟04 Output 输出TY1, 下到站钟05 Output 输出TY2, 轿厢照明06 Output 输出TY2, 轿厢照明07 Output 输出TY3, 备用08 Output 输出TY3, 备用09 Output 输出TY4, 超载灯-10 Output 输出TY4, 超载灯+11 Output 输出TY5, 蜂鸣器-12 Output 输出TY5, 蜂鸣器+13 Input 备用JP214 Input 备用上海新时达电气有限公司调试手册- 8 - STEP® 插座号端子号类型定义15 RS485+16 RS485-文档供参考,可复制、编制,期待您的好评与关注!17 备用18 备用19 Input 隔离电源输入电源+JP220 Input 隔离电源输入电源-01 Output 开门指示灯电源-02 Output 开门指示灯电源+03 Input 开门按钮TX19 的一端JP304 Input 开门按钮的另一端01 Output 关门指示灯电源-02 Output 关门指示灯电源+03 Input 关门按钮TX20 的一端JP404 Input 关门按钮的另一端01输入TX0-TX18 信号公共端0V02 Input 输入TX0, 开门到位03 Input 输入TX1, 关门到位04 Input 输入TX2, 安全触板05 Input 输入TX3, 超载06 Input 输入TX4, 满员JP507 Input 输入TX5, 备用插座号端子号类型定义08 Input 输入 TX6, 备用09 Input 输入 TX7, 轻载10 Input 输入 TX8, 司机11 Input 输入 TX9, 专用12 Input 输入 TX10,司机直驶13 Input 输入 TX11, 备用14 Input 输入 TX12, 备用15 Input 输入 TX13, 备用16 Input 输入 TX14, 备用17 Input 输入 TX15, 备用18 Input 输入 TX16, 备用19 Input 输入 TX17, 备用JP520 Input 输入 TX18, 备用01 与轿厢召唤控制器等串行通讯的+24V 电源此引脚的代码为TXV+02 与轿厢召唤控制器等串行通讯的0V 电源此引脚的代码为TXV-03 与轿厢召唤控制器等串行通讯的正端信号此引脚的代码为TXA+JP604 与轿厢召唤控制器等串行通讯的负端信号此引脚的代码为TXA上海新时达电气有限公司调试手册- 9 - STEP®2 2 轿厢板连接方法2 2 1 轿厢板与电源和通讯总线的连接双绞线4孔插头CH3.96-44针插头CH3.96-42 2 2 开关门及指令按钮的连接第三节显示板仅以SM-04-VRA 为例这里显示板仅以SM-04-VRA 为例至于其它内型的显示板的具体用法请参照SM-ICM-C 用户手册3 1 接口定义接插件具体定义JP1串行通讯接口其中1 脚为TXV+ 2 脚为TXV- 3 脚为TXA+ 4 脚为TXAJP2下行召唤按钮的输入和下行召唤按钮灯点灯电压的输出JP3 上行召唤按钮的输入和上行召唤按钮灯点灯电压的输出JP4 JP4 的3 4 脚接锁梯开关的常开触点JP5串行通讯终端电阻的跳线短接表示接入内置的120 欧姆电阻S1插上跳线器用来设置该块显示板的地址码设置完拿掉跳线器S2在锁梯的外呼显示板上插上跳线器表示该板JP4 锁梯输入有效整部电梯中只允许一块召唤控制器短接S2上海新时达电气有限公司调试手册- 11 - STEP®第二章慢车调试第一节运行前的确认和检查慢车调试运行前对现场的所有装配应进行以下步骤的三确认三检查方可进行调试三确认1 1 现场机械装配确认1 电梯底坑部件安装完好若使用液压缓冲器则应确认缓冲油是否按要求加足底坑干燥2 井道内无影响电梯运行的障碍物3 厅门安装良好4 厅门立柱与门洞之间应封闭良好5 导轨安装已经检验合格6 钢丝绳安装正确紧固7 限位开关安装固定8 限速器钢丝绳张紧轮安装正确9 轿厢轿门门刀安装正确拼装紧固10 随行电缆安装固定良好11 机房部件定位符合国家标准12 主机固定符合工厂的安装说明要求到位13 若为有齿轮曳引机应确认减速箱的油是否加到位14 应确认主机上的编码器固定是否牢固15 限速器定位应符合国家标准16 线槽敷设规整线槽间有铜片或黄绿线连接17 控制柜安装定位规整18 机房井道保持整洁19 所有安装应按照国家安装规范GB100601 2 电气装配确认1 检查下列接线是否按图接线正确1 电梯总电源箱至控制柜R1 S1 T1 的三相进线2 主机抱闸线圈至控制柜中01 ZQ1 的接线3 控制柜U1 V1 W1 至主机马达三相进线的接线4 主机编码器与控制柜中12V 0V A B 间的接线5 安全回路是否通路6 门锁回路是否通路7 轿顶接线应正确8 检修回路通断逻辑正确9 门机电源及信号接线正确10 轿厢CAN-BUS 通讯回路接线正确11 井道CAN-BUS 通讯回路接线正确2 井道和轿厢通讯电缆连接到控制柜对应接线桩上并做如下检查1 检查TXV+ TXV- TXA+和TXA-四根线与其他电源线R1 S1T1 U1 V1 W1 200 201 202 101 102 104 01 02 04ZQ1 401 402 501 502 601 602 之间的电阻应接近无穷大2 测量TXV+ TXV- TXA+ TXA--与PE 接地之间的电阻应确认该电阻值为无穷大3 测量TXA+ TXA-之间的电阻a. 确认轿厢内的SM-04 板上的JP5 跨线是否接上b. 确认最低一层的井道模块SM-04 板上的JP5 跨线是否接上c. 只接井道通讯模块等其阻值应为120Ω 左右注意以下检查过程中出现任何问题都必须仔细检查并排除故障确认不会影响设备及人生安全上海新时达电气有限公司调试手册- 12 - STEP®d. 控制柜壁及门与PE 之间e. 线槽最末端与PE 之间f. 限速器与PE 之间g. 轿厢与PE 之间h. 厅门电气门锁与PE 之间i. 井道底坑由各安全开关接地点与PE 之间注在调试之前请务必确认工地提供的电源中的地线接地良好符合国家标准1 3 编码器装配的确认1 检查编码器的固定应牢固编码器轴与主机延伸轴之间的连轴器应连接固定良好2 编码器连线最好直接从编码器引入控制柜3 若编码器连线不够长需要接线则延长部分也应为屏蔽线并且与编码器原线的连接最好采用烙铁焊接线与线之间应绝缘隔离外套金属纸屏蔽4 按接线图及编码器上线色定义正确接线5 检查编码器屏蔽线悬空时不应接地6 编码器屏蔽线接在控制柜中的接地铜排上7 若发现编码器屏蔽线原本接地则该屏蔽线可悬空不接但应保证不能与任何有电端子或接地外壳接触三检查1 4 通电前电源的检查1 检查现场提供三相五线制的总进线电压三相电压应为380±7%VAC 相间偏差不应大于15VAC 每一相与N 线之间的单相电压为220±7%VAC N 线与PE 之间若相通则N-PE 之间的电压不能大于30 VAC2 检查总进线线规及总开关容量应达到CAD 图纸的要求3 以上两点检查都得以确认正常后才可以给控制柜上电d. 只接轿厢通讯模块等其阻值应为120Ω 左右e. 全部井道和轿厢通讯模块接上后其阻值应为60Ω 左右3 在接上主机抱闸线后01 与ZQ1 之间的电阻应在R 值的左右110V注R 值约等于Ω抱闸铭牌上的额定电流A4 检查马达三相间的电阻是否平衡5 各种接地检查1 以下检查要求各测量端子及部位与PE 总进线接地端以下简称PE 的电阻接近无穷大a. R1 S1 T1 与PE 之间b. 01- 02+ 04 ZQ1 与PE 之间c. 200 201 202 与PE 之间d. 101 102 104 与PE 之间e. 501 502 与PE 之间f. 601 602 与PE 之间g. TXV+ TXV- COM TXA+ TXA-与PE 之间h. 马达三相U V W 与PE 之间i. 旋转编码器12V A B OV 与PE 之间j. 401 402 与PE 之间k. 变频器及制动单元上各信号端子及动力电端子与PE 之间l. 安全回路及门锁回路中的中间接线的端子与PE 之间m. 检修回路中的端子与PE 之间以上检查中若发现电阻值偏小请立即检查找出故障修复后才能继续调试2 以下检查要求各测量端子及部位与PE 接地的电阻值尽可能小0~3Ωa. 马达接地点与PE 之间b. 变频器接地点与PE 之间c. 抱闸接地点与PE 之间上海新时达电气有限公司调试手册- 13 - STEP®1 6 主板的相关检查1 检查SM-Std 板上LED 的发光显示情况发光的LED 名称X3 X5* X6* X7* X8* X9 X10 X16* X17* Y2注打* 的符号表示调试时可能尚未接线所以只有通过跨接相应点和COM 端子才能使LED 亮起2 在液晶操作器上输入密码后进入参数菜单检查参数设置并根据合同及调试要求进行设置液晶操作器的操作详见使用手册之液晶操作器使用说明第二节系统和变频器参数设置1 用液晶操作器检查SM-Std 主板上的主要参数设置见下表参数设置单位备注Motor Speed电梯额定速度合同规定的电梯额定速度Cm/sRated Speed电机额定转速见注1 RpmEncoder Pulses编码器脉冲数*变频器输出的编码器每转脉冲数见注2pprFloor Offset楼层偏置工地现场的地下总站数并联梯楼层不一致时设定No. Of Flr预设总层数工地现场电梯的总停层数*编码器脉冲数指的是变频器输出的编码器每转脉冲数由于电梯的编码器信号接入变频器可系统用于位置信号的编码器信号则来源于变频器输出的编码器信号变频器本身具有分频功能即对输入的编码器信号进行处理并按一定比例输出所以该参数应根据变频器分频功能1 5 通电后电源相关部分的检查1 合上总电源开关检查相序继电器KAP 若KAP 上有绿灯显示则表示相位正常否则应关闭总电源开关后更换任意两相进线相位2 检查控制柜中TCO 变压器该变压器上的测量电压如下变压器端子5-6 7-9 8-910-1110-120-2 R1-S1 S1-T1 R1-T1测量电压220±7%110±7%90±7%12±7%20±7%380±7%380±7%380±7%380±7%3 若检测正常则合上FU2 端子101-102 的电压应为110±7% VAC端子01-02 的电压应为110±7% VDC合上FU3 端子200-202 的电压应为220±7% VAC合上SW 主控板SM-01 上的液晶显示器应有显示4 将控制柜上的急停开STOP 复位后应检查以下项目a. 开关电源TPB 直流电源检查端子L-N +24 COM +5 COM电压200±7% VAC 24.3±0.3VDC 5.1±0.1VDC若上述直流电压不能达到要求则可调节TPB 端子排右侧的电位器适当调整至以上数值b. 检查TXV+ TXV-间的电压为24.3V±0.3Vc. 检查控制柜中继电器吸合的情况继电器名称吸合情况KAP 绿灯亮KAS 动作KAD 动作KMC 动作上海新时达电气有限公司调试手册- 14 - STEP®2 安川变频器型号616G5功能码名称参数设置Constant access levelA1-01Access Level3Reference selectionB1-01Reference Source1Operation method selectionB1-02Run Source1输出电压设定E1-01Input Voltage工地现场输入电压VAC电机选择E1-02Motor Selection最高输出频率E1-04Max Frequency50HZ最大电压VMAXE1-05Max Voltage曳引电机额定电压基频FAE1-06Base Frequency50H Z最低输出频率FMINE1-09 Min FrequencyTerminal 13 Bias0H Z中间输出频率2E1-11Mid Frequency B0H Z中间输出频率电压2(VC)E1-12Mid Voltage BOVRC基本电压E1-13Base VoltageMotor rated currentE2-01Motor Rated FLA电机额定电流进行设定例如编码器铭牌上的脉冲数为1024 该控制柜采用Yaskawa 616G5 变频器变频器参数F1-06=2 变频器输出的编码器信号分频比为2 则参数编码器脉冲数为512 所以参数编码器脉冲数= 编码器铭牌脉冲数/变频器分频数2 变频器的参数设置在进行慢车调试之前应检查变频器的参数设置1 富士变频器型号FRENIC5000G11UD功能码名称显示参数设置F01 频率设定1 FREQ CMD 1 1F02 运行操作OPR METHOD 1F03 最高输出频率MAX H Z-1 50 H ZF04 基本频率1 BASE H Z-1 50 H ZF05 额定电压1 RADET V-1 现场输入电压F06 最高输出电压1 MAX V-1 铭牌额定电压F17 增益频率设定信号FREQ GAIN 100%F18 偏置频率FREQ BIAS 0.0 H ZF23 起动频率START H Z 0.0 H ZF24 持续时间HOLDING H Z 0.0SF25 停止频率STOP H Z 0.1 H ZF26 电机转动声载波频率MTR SOUND 15 H ZE09 9 端子功能选择X9 FUNC 9P09 转差补偿量SLIP COMP 1 0O01 选择速度指令方式选项01 1O03 编码器脉冲数选项03编码器铭牌上的每转脉冲数O04 ASR P 常数选项04 20 倍左右P01 电机1 极数MI POLES 马达极数P02 电机1 容量MI CAP 电机额定功率P03 电机1 额定电流MI Ir 额定电流上海新时达电气有限公司调试手册- 15 - STEP®c. 保证安全回路102-114 为通路门锁回路120-118 为通路7 合上电梯电源总闸复位急停开关8 确认控制柜中KAS KAD 继电器吸合KMC KMY KMB 接触器应吸合变频器带电并显示正常9 主机抱闸打开用于盘动盘车轮盘动时应感觉盘动时无受阻感觉10 变频器参数设置主要检查设定以下参数参数显示设定User setting countantA1-02User Parma 1to 23输出电压设定E1-01Input Voltage现场输入电压VAC电机选择文档供参考,可复制、编制,期待您的好评与关注!E1-02Motor Selection最高输出频率E1-04Max Frequency50H Z最大电压VMAXE1-05Max Voltage额定电压VAC基频FAE1-06Base Frequency50 H Z最低输出频率FMINE1-09Min Frequency0 H ZMotor rated slipE2-01Motor Rated Slip电机额定电流APG constantF1-01PG Pulse/Rev马达编码器铭牌每转脉冲数1 2 整定过程1 进入变频器Auto-tune 菜单2 根据变频器提示逐一输入以下参数a. 电动机额定电压b. 电动机额定电流接上表功能码名称参数设置PG constantF1-01PG Pulse/Rev旋转编码器铭牌每转脉冲数PG division Rate (PG pulseF1-06 monitor)PG Output Ra-too1文档供参考,可复制、编制,期待您的好评与关注!Signal level selection (terminal 13)H3-01Term 13 SignalGain (terminal 13)H3-02Terminal 13 Gain100H3-03 Bias (terminal 13) 0.0 H ZL3-04Stall prevention selection duringdecal第三节主机整定进行主机参数自整定这是使变频器与曳引机匹配运行而必须做的步骤1 使用安川变频器型号616G5 的主机整定1 1 整定前的准备和检查在对主机进行整定之前请按照第二章第一节描述的主机安装及控制柜接线进行检查并做好以下几项事宜1 关掉电梯电源按下控制柜上的急停开关将控制柜中自动运行/检修开关拨至检修位置2 确认主机抱闸线已正确接在控制柜01 ZQ1 端子上3 移去主机曳引轮上的钢丝绳并加以保护以防磨损4 确认主机曳引轮及其他运转部件在运行时无阻碍5 跨接线6 对于SM-Std 板应做如下工作a. 板上的Y0 Y1 Y2 Y3 COM1 上的线拆下并作好标记合并在一起用绝缘胶带缠好以防短路上海新时达电气有限公司调试手册- 16 - STEP®1 3 VS-616G5 整定中的常见问题异常表示异常内容原因对策Date Invalid(MotorDate fault)自学习时已设定数据异常额定频率额定转速电机极数的关系异常按照[ 额定转速文档供参考,可复制、编制,期待您的好评与关注!<120 额定频率/电机极数]修正数据负载连接在电机上脱开电机的负载自学习时的设定值异常确认额定电流值修正正确ALARM: OverLoad(Excessivetuning load)自学习中实效负载率超过20%电机的轴承异常停止状态[变频器电源OFF]用于转电机轴如果不能平滑地转动请交换电机电机的动力线断线检查配线修正断线部分Motor speed(MotorSpeed fault)自学习中力矩指令值超过100%负载连接在电机上脱开电机的负载力矩极限功能未动作将力矩极限L7-01~L7-04的值回复到初期值加速时间太短延长加速时间C1-01 的设定值Accelerate(Accelerationfault)在所定的时间电机不加速负载连接在电机上脱开电机的负载c. 电动机额定频率d. 电动机额定转速e. 电动机极数f. 电机选择为1g. 编码器每转脉冲数3 变频器显示[ Tuning Ready? Press RUN Key ]后按变频器RUN 键该键开始闪烁4 自整定在大约1 分钟后完成结束时变频器显示Tune Successful.5 按下MENU 键进Programming 菜单6 记录下以下自整定参数参数显示备注Motor rated slipE2-02Motor rated slipMotor no-load currentE2-03No-Load CurrentNumber of motor polesE2-04Number of PolesMotor Line-to-line resistanceE2-05Term ResistanceMotor iron-core saturation coefficient 1E2-07Saturation Comp 1Motor iron-core saturation coefficient 2E2-08Saturation Comp 2Motor mechanical lossE2-09Mechanical Loss7 重复以上1 - 6 步骤多次一般3-4 次而后将各参数取其平均值后填入调试记录并写入相应的E2-02 E2-03 E2-04 E2-05 E2-06 E2-07 E2-08 E2-09 参数下储存上海新时达电气有限公司调试手册- 17 - STEP®接上表异常表示异常内容原因对策Tune AbortedMinor Fault:变频器发生了轻故障对左边所示异常显示的部分进行检查额定电压,额定频率的设定值不适当确认,修正设定值V/f over Setting自学习时,力矩指令好过100%且空载电流超过电机额定电流的70%负载连接在电机上脱开电机的负载整定完毕关电将所有跨接线复原接上表异常表示异常内容原因对策Rated Slip(Rated Slip fault)所定时间内不能调整额定滑差量负载连接在电机上文档供参考,可复制、编制,期待您的好评与关注!脱开电机的负载Saturation-1(IronCore saturationcoefficient 1 fault)电机额定转速的设定值不适当确认修正设定值Saturation-2(IronCore saturationcoefficient 2 fault)所定时间内不能调整铁心饱和系数电机动力线断线检查接线修正断线部分Resistance(Lone-to-lineresistance fault)电机额定电流的设定值不适当确认修正设定值No-load Current(No-load currentfault)所定时间内不能调整线间电阻/ 无负载电流电机动力线断线检查接线修正断线部分MotorDirection Fault(MotorDirection fault)变频器与PG AB 相电机U.VW 的接线不良检查PG 接线检查电动接线检查PG 方向及参数F1-05PG Circuit FaultPGO: PGBreak detected电机有输出但从PG 来的脉冲无输入PG 断线PG 的电源线断线异常检查接线,修正接线上海新时达电气有限公司调试手册- 18 - STEP®2 使用富士变频器FRENIC5000G11UD 的主机整定2 1 整定前的准备和检查和使用安川变频器型号616G5 主机整定前的准备和检查的1 9 条相同10 变频器参数设置主要检查设定以下参数功能码名称显示设定F01 频率设定1 FREQ CMD 1 0F02 运行操作OPR METHOD 0F03 最高输出频率MAX H Z-1 50 H ZF04 基本频率1 BASE H Z-1 50 H ZF05 额定电压1 RADET V-1工地输入(VACF06 最高输出电压1 MAX V-1电机额定电压VACF07 加减速时间1 ACC TIME 1 2SF08 加减速时间2 DEC TIME 1 2SP01 电机1 极数M1 POLES 电机极数P02 电机1 容量M1-CAP 电机功率P03电机1 额定电流M1-Ir电机额定电流O01 选择速度指令方式选项01 1O03编码器脉冲数马达编码器铭牌每转脉冲数2 2 整定过程1 进入变频器参数P04 将P04 设置为2 储存2 按FWD 按纽则绿色[RUN]灯亮变频器开始整定3 变频器或REV 显示25.00 H Z 则主机开始运行4 数十秒后电机转动停止整定结束5 按下[STOP]键进入菜单记录以下自整定参数参数名称显示P06 空载电流P07 %RIP08 %X6 重复以上1 - 5 步骤多次可交替按FWD 和REV 键而后将各参数取其平均值后填入调试记录并写入P06 P07 P08 参数下并储存整定完毕关电将所有跨接线复原第四节机房检修运行按以前章节要求进行了检查确认以及参数设置后则可进行机房检修运行调试1. 调试前的必要检查1 再次确认井道轿厢无人2 无阻碍电梯运行的条件3 将总电源关闭接上抱闸线至端子01 ZQ14 确认当前电梯处于机房检修运行状态确认安全回路门锁回路均为通路5 最好在轿厢内放置砝码使轿厢与对重基本平衡2 调试步骤1 合上总电源将控制柜急停开关复位2 确认控制柜中KAS KAD 继电器KMC 接触器吸合变频器带电显示正常液晶显示器显示检修状态3 按控制柜中上下行按钮a. 当电梯运行时变频器均显示当前电梯的运行速度b. 同时也可在变频器的输入输出状态中检查信号的接收和输出状态c. 若电梯运行发生振动时可将马达编码器的A B 两接线在关电后对换然后再送电检查运行情况上海新时达电气有限公司调试手册- 19 - STEP®d. 若电梯的运行方向与按纽的方向不一致则在关电后调换马达相线U V 与变频器U V 端子相连的线同时将马达编码器的AB 两线对换然后在送电检查运行情况e. 检查液晶操作器上显示的速度上行应为正值下行应为负值若不同则关电后调换变频器PG 板上的接线具体如下安川变频器VARISPEED 616G5PG 卡TA2 端子富士变频器FRENIC 5000GIIUDPG 卡FYA FXBf. 检查液晶操作器上显示的速度是否与设定的速度值相一致第五节轿顶检修操作在机房检修运行正常后在确认安全的前提下可进行轿顶检修操作在进行轿顶检修操作前应确认轿顶检修运行线路正确各按纽功能正常轿顶急停安全开关功能正常若发现轿顶检修上下方向按纽与电梯运行方向不一致则应检查轿顶检修方向的线路不能在控制柜中调换至变频器的方向指令或有其它变动上海新时达电气有限公司调试手册- 20 - STEP®第三章快车调试第一节运行前的确认和检查1 1 现场机械装配的确认在完成了慢车的调试任务紧接着进行快车的调试快车的调试首先同慢车一样也要进行现场机械装配的确认在此省略文字叙述1 2 现场电气装配的确认注意以下检查过程中出现任何问题都必须仔细检查并排除故障确认不会影响设备及人生安全1 门机接线正确光幕接线正确2 轿顶平层感应器接线正确并安装尺寸正确注感应器安装尺寸可参照下图3 井道内各安全开关能有效动作4 井道内上下极限安全开关安装位置正确及开关动作有效5 上下限位开关安装位置正确及开关动作有效6 上下强迫减速开关安装位置正确及开关动作有效注以上开关位置初安装尺寸可参照下图7 对讲机接线是否正确并确认通话正常8 到站钟接线应正确9 外呼通讯板的接线可靠正确10 关闭总电源开关检查通讯线上海新时达电气有限公司调试手册- 21 - STEP®b. 观察液晶操作器上应显示自动状态c. 让液晶操作器处于输入状态监视栏观察开门到位TX0 右边应显示关门到位TX1 右边应显示d. 用手按开门KAO 继电器门机执行开门动作开门到位后TX0。
新时达机器人操作软件使用说明书-B

2.1 机器人安全防护装置 ................................................................................................................ 2 2.1.1 安全防护装置预览 ............................................................................................................. 2 2.1.2 紧急关断按键 ..................................................................................................................... 2 2.1.3 运行方式选择开关 ............................................................................................................. 2 2.1.4 点动运行 ............................................................................................................................. 3 2.1.5 机械终端限位 ..................................................................................................................... 3 2.1.6 软件限位开关 ..................................................................................................................... 3
VEX产品介绍

产品介绍套装系列 (4)VEX机器人基本套装 (4)控制器套装M ICROCONTROLLER K IT (4)升级W I F I无线遥控套装N ET U PGRADE K IT (5)马达套装M OTOR K IT (5)双线加强马达套装H IGH S TRENGTH M OTOR K IT (6)伺服器套装 S ERVO K IT (6)遥控接收套装T RANSMITTER &R ECEIVER K IT (7)晶振套装A C RYSTAL U PGRADE K IT A (7)晶振套装B C RYSTAL U PGRADE K IT B (8)碰撞开关套装B UMPER S WITCH K IT (8)行程开关套装L IMIT S WITCH K IT (9)巡线传感器套装L INE T RACKER K IT (9)光敏传感器套装L IGHT S ENSOR K IT (10)超声波传感器套装U LTRASONIC R ANGE F INDER K IT (10)编码器套装O PTICAL S HAFT ENCODER K IT (11)双向编码器套装B IDIRECTIONAL O PTICAL S HAFT ENCODER K IT (11)探照灯套装F LASHLIGHT K IT (12)角度传感器套装P OTENTIOMETER K IT (12)信号分频器套装S IGNAL S PLITTER K IT (13)单向气泵套装VEX P NEUMATIC P ARTS K IT 1 (13)双向气泵套装VEX P NEUMATIC P ARTS K IT 2 (14)9.6V两电一充电池套装P OWER P ACK K IT (14)美国原装电池套装VEX P OWER P ACK (15)9.6V一电一充电池套装9.6V P OWER K IT (15)7.2V电池套装7.2V P OWER K IT (16)电源扩展器套装P OWER E XPANDER K IT (16)程序套装P ROGRAMMING P ARTS K IT (17)结构件套装H ARDWARE K IT (17)高级五金件套装A DVANCED M ETAL P ACK (18)铝金属件套装A LUMINUM M ETAL K IT (18)加长铝金属件套装L ONG A LUMINUM M ETAL K IT (19)齿条架套装R ACK B RACKET P ACK (19)蜗轮架套装W ORM B RACKET P ACK (20)差速架套装B EVEL B RACKET P ACK (20)滑动架套装L INEAR S LIDE P ACK (21)齿轮套装G EARS K IT (21)加强齿轮套装H EAVY G EARS K IT (22)高级齿轮套装A DVANCED G EAR P ACK (22)马达齿轮套装M OTOR G EARS K IT (23)金属小齿轮套装M ETAL G EARS K IT (23)车轮套装W HEEL K IT (24)万向轮套装O MNI-DIRECTIONAL W HEEL K IT (24)大万向轮套装L ARGE O MNI-DIRECTIONAL W HEEL K IT (25)腿轮套装W HEEL L EGS K IT (25)自组螺丝套装B EARING R IVETS P ACK (26)链轮套装S PROCKET AND C HAIN K IT (26)加强链轮套装H IGH S TRENGTH S PROCKET AND C HAIN K IT (27)履带套装T ANK T READ K IT (27)加强履带套装T ANK T READ U PGRADE K IT (28)电池扎带套装B ATTERY H OLD-DOWN K IT (28)扎带套装H OLD-DOWN K IT (29)防护眼镜S AFEGUARD G LASSES (29)工具包T OOLS K IT (30)竞赛系列 (31)高地战斗比赛场地 (31)高地战斗竞赛机器人范例......I型. (32)高地战斗竞赛机器人范例......II型.. (32)高地战斗竞赛机器人范例......III型.. (33)大获全胜比赛场地----中间隔墙 (33)大获全胜比赛场地----围板 (34)大获全胜比赛场地----场地纸 (34)大获全胜比赛场地----比赛用球 (35)大获全胜全套比赛场地 (35)大获全胜美国原装进口全套场地 (36)大获全胜场地控制器 (36)大获全胜竞赛机器人范例----Ⅰ型 (37)大获全胜竞赛机器人范例----Ⅱ型 (38)大获全胜竞赛机器人范例----Ⅲ型 (38)大获全胜竞赛机器人范例----Ⅳ型 (39)VEX LCD显示模块VEX LCD D ISPLAY (40)橡皮筋套装R UBBER B AND (40)网布A NTI-SLIP M AT (41)英文版程序套装E ASY C (41)套装系列VEX 机器人基本套装产品编号:产品 说明 含主控制器套装1套、遥控接收套装1套、马达套装3套、伺服器套装1套、碰撞开关套装1套、行程开关套装1套、车轮套装1套、齿轮套1套、五金件套装1套、工具套装1套、扎带1包 特性1. 高端质量、丰富齐全的零部件,为无限创意提供可能。
巡检机器人 维护使用手册说明书

巡检机器人维护使用手册版本:2.0北京眸视科技有限公司目录1.产品概述 (4)1.1.产品概述 (4)1.2.履带式机器人 (5)1.3.轮式机器人 (5)2.机器人开机 (6)2.1.机器人开机 (6)2.2.遥控器使用 (6)2.3.遥控器高级使用 (7)2.4.注意事项 (9)3.平板控制 (10)3.1.Wifi连接 (10)3.2.运行APP (10)3.3.自启动功能 (10)3.4.License更新功能 (11)3.5.参数配置 (14)3.6.状态检查 (15)3.7.开启巡检 (16)4.制图 (17)4.1.制图 (17)4.2.地图编辑 (20)4.3.地图备份与切换 (25)4.4.注意事项 (27)4.4.1.制图之前的准备 (28)4.4.2.建图操作原则 (28)4.4.3.建图结果检查 (30)5.导航 (31)5.1.导航到指定点 (31)5.2.导航到指定坐标 (32)5.3.取消导航 (32)6.1.准备工作 (34)6.2.工具安装 (34)6.2.1.开启root ssh权限 (34)6.2.2.JDK的安装 (35)6.2.3.TOMCAT安装 (35)6.2.4.MySQL数据库在线安装 (36)6.2.5.Redis安装 (37)6.2.6.Nginx安装 (37)6.3.程序部署 (38)6.3.1.前端web程序部署 (38)6.3.2.后端jar包部署 (39)6.4.系统参数配置 (41)6.4.1.域名地址映射 (41)6.4.2./etc/profile确认 (41)6.5.启动管理云平台系统程序 (41)6.5.1.后台java程序启动 (42)6.5.2.前台tomcat启动 (42)6.5.3.确认后台程序是否启动成功 (42)6.5.4.访问系统url (42)7.云平台使用 (43)7.1.系统登录 (43)7.1.1.系统首页 (44)7.1.2.个人中心 (45)7.2.实时监控 (45)7.3.数据查询 (47)7.3.1.巡检报表 (47)7.3.2.巡检点 (48)7.3.3.环境数据 (48)7.4.巡检任务 (49)7.4.1.任务管理 (49)7.4.2.任务日历 (51)7.5.1.巡检点管理 (52)7.5.2.地图管理 (53)7.5.3.机器人管理 (54)7.5.4.告警设置 (55)7.6.系统管理 (56)7.6.1.用户管理 (56)7.6.2.角色管理 (57)7.6.3.菜单管理 (59)7.6.4.场站管理 (59)7.6.5.字典管理 (60)7.6.6.车体状态 (61)7.6.7.版本信息 (62)8.巡检 (63)8.1.启动检查 (63)8.2.云平台操作 (64)9.注意事项 (66)9.1.常规检查 (66)9.2.维护保养 (66)9.3.长期储存 (67)10.快速故障排除 (69)10.1.机器人故障排查 (69)10.2.云端服务故障排查 (71)10.3.遥控器故障排查 (72)附录1:充电桩安装说明 (75)附录2、传感器清洁 (76)附录3、产品参数 (77)1.产品概述1.1.产品概述眸视机器人定位和导航系统,是一个集激光雷达、视觉(双目相机、深度相机)、超声波、惯性测量单元(IMU)等多种传感器于一体的定位和导航系统。
SD系列机器人本体使用说明书-新时达机器人

本使用说明书对 SD 系列机器人的安装、使用、功能参数设定、保养维护等 进行了全面系统的阐述。本说明书可作为系统集成商采用本公司 SD 系列机器人 进行用户工作站系统设计时的参考资料,也可作为系统安装、调试、维护的使用 资料。
为了确保能够正确的安装、使用 SD 系列机器人,请您在使用前仔细阅读本 使用说明书。
SD 系列机器人本体使用说明书
本使用说明书中包括保证操作者人身安全以及防止机器人系统损坏的有关 安全注意事项,并根据它们在安全方面的重要程度,在正文中以“危险”、“注 意”、“重要”来描述。用户在使用机器人之前,请务必熟读这些与安全方面有 关的具体标记说明,并加以严格遵守。
!危险 错误使用时,会引起危险情况,可能导致人身伤亡。
第二章 SD 系列机器人本体技术参数........................................................................... 2
2.1 机器人本体构成图....................................................................................................... 2 2.2 机器人机械参数.......................................................................................................... 3 2.3 机器人负载参数.......................................................................................................... 3 2.4 机器人运动参数.......................................................................................................... 6 2.5 机器人工作空间.......................................................................................................... 8
新时达机器人操作软件使用说明书B
STEP机器人操作软件使用说明书
适用机型:全系列 出版状态:标准 产品版本:B
中国上海新时达机器人有限公司全权负责本控制系统用户操作及 编程指南的编制、印刷。 版权所有,保留一切权利。 未得到上海新时达机器人有限公司的许可,任何单位和个人不得 擅自摘抄、复制本书(软件等)的一部分或全部,不得以任何形 式(包括资料和出版物)进行传播。 版权所有,侵权必究。内容如有改动,恕不另行通知。 All Copyright© reserved by Shanghai STEP Robotics Co., Ltd., China. Shanghai STEP Robotics Co., Ltd. authorizes in the documenting, printing to this robot control manual. All rights reserved. The information in this document is subject to change withoutprior notice. No part of this document may in any form or by any means(electronic,mechanical,micro-coping,photocopying,recording or otherwise)be reproduced, stored in a retrial system or transmitted without prior written permission from Shanghai STEP Robotics Co., Ltd.
STEP 机器人操作软件使用说明书
序言
内容提要
本操作指南对 STEP 机器人软件功能进行了全面系统地阐述。本手册可作为使 用 STEP 机器人操作软件的参考资料。
新时达主板说明

第一讲全并行控制系统功能介绍1.1.系统功能列表1.2.安全保护功能列表第二讲全并行控制系统构成 2.1.产品分类2.2. 系统主要部件性能指标2.2.1性能特点➢富士通工控单片机;➢四层板表贴工艺,CAN总线串行通讯;➢高智能,高可靠性;➢键盘操作,液晶显示;➢配有RS232/RS485接口。
2.2.2. 适用范围➢载货电梯(变频驱动、液压驱动、双速驱动);➢速度范围0~1.0m/s;2.2.3. 参照标准➢《(GB7588-2003)电梯制造与安装规范》2.2.4. 电源规格➢电压:DC24V ±1.0V;➢功耗:主控制电脑板SM-01-DP/C 25W;扩展板SM-10-IO/C 6W。
2.2.5. 工作温度➢器件工作温度-20ºC ~ +60ºC(液晶显示器件除外)2.3. 系统主要部件分类介绍2.3.1. 主控电脑板SM-01-DP/C和扩展板SM-10-IO/C图2-1(A) 主控电脑板SM-01-DP/C 外形图2-1(B) 扩展板SM-10-IO/C 外形安装底板1安装底板22-?52-?52-?42851701202541808022540图2-1(C) 主控电脑板SM-01-DP/C 安装尺寸图2-1(D) 扩展板SM-10-IO/C安装尺寸1.插件规格2.SM-01-DP/C接口定义及规格3.SM-10-IO/C接口定义及规格第三讲主控制板SM-01-DP/C参数介绍3.1 主板参数表3.2 主板F参数设置详细说明:F02——双速梯1A延迟时间即快车接触器吸合后经过该时间快车切换接触器1A吸合,参考值75,范围0S~200,单位:20ms。
F03——双速梯2A延迟时间即慢车接触器吸合后经过该时间慢车切换接触器2A吸合,参考值40,范围0~200,单位:20ms。
F04——双速梯3A延迟时间即慢车切换接触器2A吸合后经过该时间慢车切换接触器3A吸合,参考值25,范围0~200,单位:20ms。
新时达AS380B系列电梯一体化控制器操作手册V1.00

新时达特殊功能说明
特殊功能说明(2009-07-03 14:11:11)标签:操纵箱残疾人平层自学习后门1 井道自学习新程序的井道自学习功能与以前版本程序有所不同:1. 自学习前,先将电梯开到底层有一个以上平层开关动作的位置即可。
但此时,单层下行终端减速开关(强慢)必须动作。
2. 必须将电梯设置成自动状态,再通过操作器进行井道自学习。
3.当电梯只有两层楼时,还必须设置平层开关间距和平层插板长度两个参数(有三层楼以上的电梯就不需要设置)。
2 人工取消错误指令如果主操纵箱、副操纵箱、后门操纵箱和残疾人用操纵箱上的指令按钮已登记,再对该按钮连续按两下,就会消除该指令。
按钮连续按两下的间隔时间必须小于0.6秒。
3 NS-SW 功能先通过操作器设置参数F137 ~ F139,来设置NS-SW开关控制的非服务层。
当操纵箱内的NS-SW 开关闭合时(TX16),电梯就将F137 至F139 参数中设成‘0’位对应的层楼作为不停层,既不能登记这些层楼的任何指令和召唤,也不会在这些层楼平层。
4 副操纵箱功能有副操纵箱时设置F133=1,该功能即有效。
副操纵箱的SM-02 板程序需要特殊处理,它只有指令按钮和开、关门按钮的输入/输出,而不能再做其它的输入/输出。
在CAN 通信时,只有指令按钮和开、关门按钮的信号传输(协议和主操纵箱的有所区别),而不能再有其它信号的通信。
副操纵箱只在电梯自动状态时有效;而在司机或独立运行等状态时,它不工作。
5 贯通门功能一、有贯通门时设置F131=1,该功能即有效。
二、后门操纵箱的SM-02 板程序需要特殊处理,它只有指令按钮和开、关门按钮的输入/输出,而不能再做其它的输入/输出。
在CAN 通信时,只有指令按钮和开、关门按钮的信号传输(协议和主操纵箱的有所区别),而不能再有其它信号的通信。
后门操纵箱的指令按钮及开、关门按钮和主操纵箱都分开,但在实际操作时,按后门关门按钮时,如果前门还处于开门保持状态,也会和后门一起关门。
新时达机器人入门

新时达机器人入门1 认识STEP机器人【学习目标】掌握机器人系统的构成;了解机器人系统中每一部分的含义;了解机器人的一些重要参数;了解STEP机器人的编程方式;STEP机器人是一种模拟人手臂、手腕和手功能的机电一体化装置,可以对物体运动的位置、速度、加速度进行精确控制,从而完成某一工业生产的作业要求。
STEP机器人系统由机械本体、控制柜、示教器组成。
如下图所示STEP机器人的软件系统STEP机器人的硬件系统电机交流伺服电机(多摩川、婓叶、拉法特)减速机谐波减速机和RV减速机CPU 32位高速380v/3相4线目前开发有码垛Pallet、焊接Arc、折弯Bend功能包。
输入电源I/O设备自主I/O、魏德米勒I/O(裸机标配16DI,16DO)1.1 机器人的用途新时达机器人现可以进行弧焊,搬运,折弯。
1.2 新时达机器人的型号目前新时达机器人有SD系列,SA系列,SR系列,SP系列。
SD系列:SD500E,SDA500E,SD700E,SDA700E;SA系列:SA1400,SA1400A,SA1800;SR系列:SR20,SR50E,SR50B,SR165,SR210; SP系列:SP120,SP200,SP275;具体介绍请参考样本和本体使用说明书;1.3 机器人的主要参数(SA1400为例)手部负重:6KG运动轴数:6运动范围:1400mm安装方式:正装、吊装重复定位精度:正负0.05mm最大速度:1500mm/s其他参数和其他机型请参考本体使用说明书;1.4 STEP机器人的安装环境环境温度:0-45摄氏度环境湿度:普通:75%RH振动:4.9m/s2以下其他参数和其他机型请参考本体使用说明书;1.5 STEP机器人的编程方式在线编程,暂时不具备离线仿真功能;2搬运、拆箱、连线机器人【学习目标】掌握机器人的拆箱;掌握机器人的搬运、固定和倒装具体操作; 掌握机器人的线路连接;2.1 拆箱机器人将机器人从木箱中取出,拆箱后如下图所示。
新时达STEP机器人工具示教

15
上海新时达电气股份有限公司
机器人工具坐标系概念
工具坐标系 标定了工具相对于法兰(指的是末端最后第6轴的法兰凸缘盘)的 位置和姿态,这里特别注意,姿态一定不能遗漏。
法兰
意义:确定工具坐标系,才 能使机器人明白自己该如何 运动让工具到达指定的位置 并摆出相应的姿态
16
上海新时达电气股份有限公司
机器人工具示教
World坐标系:固定的直角(笛卡尔)坐标系 Base坐标系:与机器人底座固连的笛卡尔坐 标系 用户自定义坐标系:用户定义的工作台坐标 系或工件坐标系,也是固定的 工具坐标系:与机器人工具固连的笛卡尔坐
标系,随机器人的运动而改变。
附加轴坐标系:与外部附加轴系统固连的笛 卡尔坐标系,随附加轴的改变而变化。 关节坐标系:机器人各关节上固定的坐标系, 用于确定机器人的关节角。
在示教器变量中tool变量用来记录各种工具坐标系,而一个新的工 具需要靠示教的办法来确定它的具体参数,包括位置和姿态示教 (姿态一定要示教,不能遗漏) 当然如果已知工具参数也可以直接输入参数来确定工具坐标系
17
上海新时达电气股份有限公司
机器人工具示教
工具示教方法
工具位置的示教分为:
一点法(仅需示教一点)
用已经知道的尺寸的工具,从任意一 方向移动到参考点。
机器人法兰上装好的待测的工具, 再次从任意方向移动到参考点。
19
上海新时达电气股份有限公司
工具位置四点法标定
四点法示教获得机器人工具的xyz
原理:机器人法兰加待测工具通过四次以不同 的位姿示教同一个参考点。记录这四个点的法 兰位置,以这四点所构成的球面的球心即为工 具的末端xyz位置,通过坐标变换,即可求得工 具相对法兰的xyz。
新时达一体机资料

1.主板端口定义
控制回路端子排列见图3.17控制回路端子所示。
图3.17 控制回路端子
1.1 输入输出接口定义
序号
位置 名称 定义
类型 备注 JP1
1.
J
P1.1
X0
检修信号1,断开为检修,X0和X1全接通为自动
Input
JP1.2 X1 检修信号2,断开为检修,X0和X1全接通为自动
Input JP1.3 X2 上行信号,检修:点动上行;司机:上行换向 Input JP1.4
X3
下行信号,检修:点动下行;司机:下行换向
Input
低压光耦隔离输入
高压光耦隔离输入 可编程继电器输出
编码器信号输入接口 (冗余) PG 卡分频信号输出
输入输出24V 隔离电源控制输入
CAN 通讯 接口
系统 保留 端口
Modem 远程监控接口
手持操作器接口/小区监控接口
2.主板参数一览表
故障代码及分析表9.1:。
新时达二代一体化参数说明 (1)
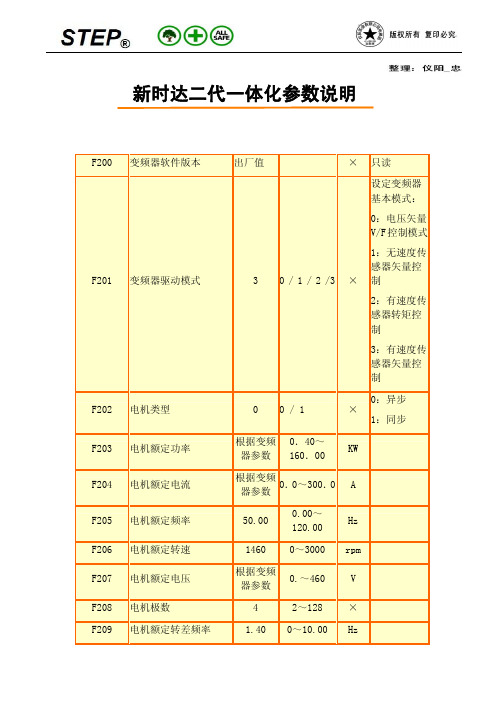
据 0.0 0.0~360.0 度
100.0 0.0~200.0 %
转矩补偿偏置
0.0 0.0~100.0 %
编码器反馈信号滤波时 间
0
1~30
ms
编码器反馈方向
1:正序
1
0/1
×
0:负序
电机相序
1:正方向
1
0/1
×
0:反.00~60.00
%
一般不用设 置
PWM 载波频率
6.000
1.100~ 11.000
×
低速 PID 调节器积分 I1
30.00
0.00~ 655.35
×
低速 PID 调节器微分 D1
0.50
0.00~ 655.35
×
中速 PID 调节器增益 P2
120.00
0.00~ 655.35
×
中速 PID 调节器积分 I2
25.00
0.00~ 655.35
×
中速 PID 调节器微分 D2
0.20
一般情况下 kHz 不要调整该
参数
PWM 载波宽度
0
0.000~ 1.000
一般情况下 kHz 不要调整该
参数
调节器模式
一般情况下
1
0/1/2/3 × 不要调整该
参数
输出力矩限制
一般情况下
175
0~200 % 不要调整该
参数
变频器输入电压
380
0~460
V
变频器额定功率
KW 这是一个只 读的查询数
F242 编码器相位角
1:无速度传 感器矢量控 3 0 / 1 / 2 /3 × 制
2:有速度传 感器转矩控 制
新时达STEP机器人程序编程PPT课件

新时达step机器人程序编程

物流自动化
在物流领域,该机器人可以 实现货物的快速分拣、搬运 和码垛,提高了物流运作的 效率和准确性。
医疗设备
新时达Step机器人在医疗设 备领域也有广泛应用,如自 动药物分发、医疗器械的自 动检测等。
服务行业
动态调整
根据机器人实际运行情况动态调整算法参数,以实现 最优性能。
多机器人协同编程
01
02
03
通信协议
建立统一的通信协议,实 现多机器人之间的信息交 互和协同作业。
任务分配
根据机器人性能和任务需 求,合理分配任务人协同作业过程进 行实时监控,根据实际情 况调整机器人行为,确保 任务顺利完成。
自定义库与模块化编程
01
自定义库
根据实际需求,创建自定义库, 封装常用功能和算法,方便程序 调用。
02
03
模块化编程
模块复用
将程序拆分成多个模块,每个模 块负责特定功能,提高代码可读 性和可维护性。
确保模块之间接口规范一致,实 现模块复用,减少重复开发工作 量。
05
案例分析
自动化生产线控制
自动化生产线控制是新时达step机器人程序编程的重要应用 之一。通过编程,机器人可以实现自动化生产线的物料搬运 、装配、检测等任务,提高生产效率,降低人工成本。
在此添加您的文本16字
实现复杂的运动轨迹,如曲线、圆弧和多段线等。
在此添加您的文本16字
考虑机器人的动力学特性和关节限制,确保运动的可行性 和安全性。
传感器应用编程
总结词:利用传感器获取环境信息,实现机器 人与环境的交互和感知。
01
新时达货梯
2.2.4. 电源规格
¾ 电压:DC24V ±1.0V; ¾ 功耗:主控制电脑板 SM-01-DP/C 25W;扩展板 SM-10-IO/C 6W。
2.2.5. 工作温度
¾ 器件工作温度-20ºC ~ +60ºC(液晶显示器件除外)
5/44
STEP 上海新时达电气有限公司 ADD:上海嘉定区南翔新勤路 290 号 PC:201802
安装底板1
ADD:上海嘉定区南翔新勤路 290 号 PC:201802 FAX:021-39127581
主控板
扩展板
安装底板2
225
65 安装底板3
2-4 2-5
1. 插件规格
图 2-1(D) 扩展板 SM-10-IO/C 安装尺寸
SM-01-DP/C
插座号
型号
JP1/JP2/JP4/JP6 JP3/JP7 JP5 JP8 JP9
在司机状态,如果在电梯起动前按一下直驶按钮,电梯在接下来的一次运行过
25
司机按钮直驶
程中,沿途不响应召唤信号,而直驶到指令登记的层楼,到达该楼层后自动取
消直驶功能。
独立运行即专用运行,此时电梯不接受外召唤登记,也没有自动关门,其操作
26
独立运行
方式同司机操作相似。
层楼位置信号的自动 系统运行时在每个终端开关和强迫减速开关动作点和每层楼平层开关动作点都
在自动状态满载时,电梯不响应经过的召唤信号而只响应指令信号。 在电梯减速平层过程中会鸣响装在轿顶或轿底的上、下到站钟,以提醒轿内乘 客和厅外候梯乘客电梯正在平层。 如电梯无指令和外召登记超过 3 分钟,轿厢内照明、风扇自动断电,以节省电 源。当电梯接受到任何外部信号时,又会自动重新上电投入使用。此时间可通 过参数调整。 无司机运行时,如果设定自动返基功能有效,当无指令和召唤时,电梯自动返 回基站。 液晶操作面板不仅能显示电梯的速度、方向、状态和电梯的给定运行速度曲线
新时达F参数说明

主板参数说明(配无参数分类操作器使用)参数参数含义备注出厂值单位读做0 加速斜率调整启动加速度550 mm/s2 0.55m/ s21 减速斜率调整制动减速度550 mm/s2 0.55m/ s22 S曲线T0 启动初S弯角时间1300 0.01s 1.300s3 S曲线T1 加速末S弯角时间1100 0.01s 1.100s4 S曲线T2 减速初S弯角时间1100 0.01s 1.100s5 S曲线T3 减速末S弯角时间1300 0.01s 1.300s6 电梯额定速度电梯标定值1750 mm/s 1.75m/s7 电机额定转速电动机铭牌值1450 rpm 1450rpm8 编码器脉冲数编码器经PG卡分频后的每转脉冲数 1024 ppr 1024ppr9 锁梯基站锁梯时返回的基站 110 偏置实层数011 预设总层数井道中安装的总插板数1812 检修速度检修运行时的速度250 mm/s 0.250m/s13 返平层速度自动找平层时的速度60 mm/s 0.060m/s14 关门延时1 响应召唤停梯时开门保持时间30 0.1s 3.0s15 关门延时2 响应内选停梯时开门保持时间30 0.1s 3.0s16 开闸延时从调速器运行信号给出到开始打开抱闸的延时时间 2 0.1s 0.2s17 去除运行延时从开始上抱闸到去除调速器运行信号的延时时间 6 0.1s 0.6s18 消防基站消防状态时返回的基站 119 第二消防基站 120 延迟返基时间0:无延时,立刻返基站。
0 s 0s21 平层误差距离电梯单层运行和多层运行的平层误差修正 6 mm 6mm22 并联时第一基站由并联调配的第一基站(参见F20,F196,F197) 123 并联模式1:并联副梯(兼容老程序)2:群控(兼容老程序)3::互为并联模式(参见F181) 324 驱动模式0:数字量; 1:模拟量 125 输入类型1 X0-X15输入点的常开或常闭设置48126 输入类型2 X16-X31输入点的常开或常闭设置 427 输入类型3 TX0-TX15输入点的常开或常闭设置425528 输入类型4 TX16-TX31输入点的常开或常闭设置029 服务层站1 设定各层站是否可停靠1-16楼 6553530 服务层站2 设定各层站是否可停靠17-32楼6553531 服务层站3 设定各层站是否可停靠33-48楼6553532 数字量时设置变频器的类型代码0: YASKAWA,CT,FUJI,iAStar1:SIMENS2: KEB3: MICO4: SIEI5: Dietz 033 自动运行间隔 5 s 5s34 自动运行次数035 消防模式0: 中国标准1: 苏州迅达模式(仅区别于消防时允许关门) 036 抱闸开关检测模式0:没有抱闸开关设置1:在除香港以外的其它地区使用2:在香港地区使用43 司机状态外呼蜂鸣闪烁功能选择0-无蜂鸣无闪烁(标准司机模式)1-有蜂鸣无闪烁(标准司机模式)2-无蜂鸣有闪烁(标准司机模式)3-有蜂鸣有闪烁(标准司机模式)4-允许关门待梯以上可以组合,例如:7代表有蜂鸣有闪烁并开门待梯344 串行通讯本机地址小区监控或远程监控时本梯在梯群中的地址,无监控时为255。
新时达一体机参数设置
新时达一体机参数设置1.模拟量速度曲线配置:F0:加速斜率,F1:减速斜率,F2:S曲线T0,F3:S曲线T1,F4:S曲线T2,F5:S曲线T3。
2. 基本参数配置:F6:电梯额定速度,F7:电机额定转速,F8:编码器每转脉冲数,F11:总楼层数。
3. 启动和停车时序参数:F16 开闸延时:从变频器运行信号给出到开始打开报闸的延时时间.F17 抱闸延时:从开始上抱闸到去除变频器运行方向的延时.F58 启动曲线延时:从打开抱闸到速度曲线给出的延时时间.F59 速度到0后经过F59时间上抱闸.F122 检修去方向延时,检修时断开抱闸接触器到去掉运行方向的延时时间.4并联群控参数设置:F23 :并联模式设3互为并联方式.设2为群控方式.F181:互为并联电梯编号,设0为主梯,设1为副梯.5输入类型设置:F25 X0-X15常开常闭设定F26 X16-X25常开常闭设定F27 TX0-TX15常开常闭设定F28 TX16-TX19常开常闭设定6服务层站设置:F29 设置1-16层停靠F30 设置17-32层停靠F31 设置33-48层停靠7一体化驱动控制器规格选择参数:F32:5.5kw设0; 7.5kw设1;11kw设2; 15kw设3;18.5kw设4; 22kw设5;30kw设6; 37kw设7;8自动运行设置:F33 自动运行间隔F34 自动运行次数设置完F33和F34后请在轿内登记指令信号来触发自动运行功能.9抱闸开关检测:F36 设0 无抱闸开关检测设1 中国地区标准设2 香港地区标准10司机外呼蜂鸣闪烁功能:F43 设0 无蜂鸣无闪烁设1 有蜂鸣无闪烁设2 无蜂鸣有闪烁设3 有蜂鸣有闪烁11串行通讯地址:F44 串行通讯本机地址,小区监控时需设置,以便远程电脑区分主板. 12设置开门:F50 开门允许1-16层.F51 开门允许17-32层.F52 开门允许33-48层.F53 后门允许1-16层.F54 后门允许17-32层.F55 后门允许33-48层.13 KMC检测模式:F60 :设0 KMC前置,常通,不检测.设1 KMC前置,常通,粘连检测.设2 KMC前置,每次运行后通断,粘连检测.设3 KMC后置,每次运行后通断,粘连检测.14打滑保护时间限制:F62快车全程运行加10S和45S取小值范围在20S-45S之间15楼层显示代码:F65-F112:对应1-48层楼层显示16强迫关门开门保持时间:F117:强迫关门或者开门保持按钮(TX18)按过后的开门保持时间设定值17残疾人开门保持时间:F118:残疾人开门保持时间设定值18防捣乱功能:F120:设0 无此功能设1 按光幕动作计算(连续3层停靠没有光幕动作)设2-64 防捣乱指令数(根据轻载开关来检测)19强迫关门功能:F121设0 不开通设1 开通20召唤分类功能:F123设0 只有前门召唤(地址1-48)设1 有前门召唤(地址1-48)和后门召唤(地址49-96)设2 有前门召唤(地址1-48)和残疾人召唤(地址49-96)设3 有前门召唤(地址1-32),后门召唤(地址33-64)和残疾人召唤(地址65-96) 21前后门控制模式:F128设0 前后门分开控制(有前后门操纵箱)设1 前后门一起控制(只有一个操纵箱)22提前开门功能:F129设0 没有提前开门和开门再平层功能设1 有提前开门功能设2 有开门再平层功能设3 既有提前开门又有开门再平层功能23开关门力矩保持功能设定:F130设0 无开关门力矩保持设1 有开门力矩保持设2 有关门力矩保持设3 有开关门力矩保持设4 运行中有关门力矩保持24 NS-SW功能设定:(对应02板输入TX16)F137NS-SW功能时设定服务楼层1-16层F138NS-SW功能时设定服务楼层17-32层F139NS-SW功能时设定服务楼层33-48层25称重模式:(匹配STEP称重装置)F164设0 系统不处理称重设1 称重信号通过CAN通讯输入主板,超满载信号也通过CAN通讯输入.设2 称重信号通过CAN通讯输入主板,超满载信号通过轿箱板输入.26调试不开门模式:F165设0 调试时电梯开门设1 检修时禁止门动作设2 调试时电梯不开门设3 检修时禁止门动作和调试时电梯不开门27速度增益:F180 对速度给定峰值的增益出厂值100028井道中减速开关的级数:F182井道中安装有几道强迫减速开关.该参数设置不当会导致井道学习失败.29井道学习速度:F183模拟量给定时井道自学习速度.30井道学习:1.电梯检修开到最底层平层;2.触发手持操作器中的井道学习菜单;3.转自动,电梯会以井道学习速度上行,直到最顶层停止;4.井道学习完成,可以运行快车.31井道学习不成功的原因:1.自学习的插板数和总楼层数不一样;2.平层插板太长或者太短:(平层插板长度+ 平层开关间距)/2 的距离小于100mm或者大于900mm ;3.平层区太长或太短:(平层插板长度- 平层开关间距)/2 的距离小于10mm 或者大于200mm32减速开关级数(F182)与实际安装减速开关数不一致;5.减速开关的距离不符合规定;33井道数据含义(通过监控界面):1: 下端站平层基准位置0 mm2: 2 楼平层离开下端站平层位置(mm)3: 3 楼平层离开下端站平层位置(mm)4: 4 楼平层离开下端站平层位置(mm)64: 64楼平层离开下端站平层位置(mm)65: 平层插板的长度(以2 楼的插板为基准,mm)66: 平层感应器间距(mm)67: 上行1 级减速开关到上端站的距离(mm)68: 上行2 级减速开关到上端站的距离(mm)69: 上行3 级减速开关到上端站的距离(mm)70: 上行4 级减速开关到上端站的距离(mm)71: 下行1 级减速开关到下端站的距离(mm)72: 下行2 级减速开关到下端站的距离(mm)73: 下行3 级减速开关到下端站的距离(mm)74: 下行4 级减速开关到下端站的距离(mm)34同步电机自整定:触发手持操作器中电机自学习菜单,检修上行,从电机负载侧看,电机应该顺时针转,如反,可交换主机V,W相,整定完毕会自动上闸,整定出的角度储存在参数F228中。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
热烈欢迎 河北科瑞达 肖总 一行
莅临指导
上海新时达机器人有限公司
股份公司简介
• 新时达成立于1995年 • 2010年12月深交所上市
Science
• 电气传动及运动控制专家 • 业务领域:电梯控制与驱动、工业传动、
物联网、运动控制、机器人、新能源
Technology
Electric
机器人打磨去毛刺等
机器人周边设备开发、制造
上海新时达机器人有限公司
部分客户
上海新时达机器人有限公司
培训中心
技术支持
技术咨询
客户服务
方案设计
产品推广
现场调试
上海新时达机器人有限公司
Step by Step, Dreams Come True
一步一步,梦想在这里实现
Science
Technology
工作空间检验
湿热环境
最大速度检验
振动检验
位姿特性检验
运输检验
轨迹特性检验
传导抗扰度试验
静态柔顺性
辐射抗扰度试验 脉冲群抗扰度试验
传导骚扰试验
三相谐波试验
浪涌抗扰试验
静电放电试验
电压波动及闪 烁试验 工频磁场抗扰 度试验 电压暂降、暂时 中断和变化试验
上海新时达机器人有限公司
测试车间
机器人标定
EMC测试
机器人性能测试
测试结果
上海新时达机器人有限公司
工业机器人应用
焊接
搬运
码垛
上下料
喷涂
装配
上海新时达机器人有限公司
SCARA机器人产品系列
上海新时达机器人有限公司
SCARA机器人应用
3C电子领域 视觉分拣
注塑上下料
电机插件
打螺丝
打磨
上海新时达机器人有限公司
智能制造集成项目(晓奥享荣)
设计工程师72人,其中日本享荣专家2人。 拥有工作站50余台。 采用EM-POWER、MODVIEW、DELMIA规划设计。 采用CATIA、UG、MDT三维设计。
12套标准L型变位机
8套重载L型变位机(5T负载以上、
机器人外部轴控制)
上海新时达机器人有限公司
MQB A柱与门槛板生产线
10台机器人 中频伺服焊枪
上海新时达机器人有限公司
智能制造项目
汽车白车身焊装生产线机器人系统工程
机器人模拟仿真\离线编程
机器人焊接\切割系统 (点焊\弧焊\激光焊\机床上下料等)
上海新时达机器人有限公司
整车焊装线
80台机器人 伺服焊枪 多车型切换
上海新时达机器人有限公司
白车身生产线: 车身线
129台机器人生产线 三车型混线生产 “十字滑台”柔性技术
上海新时达机器人有限公司
底盘、车架弧焊生产线
70台机器人(69套弧焊机器人)
6套底盘件弧焊工作站+一条全自动 化弧焊生产线
环境可靠性实验室 高加速寿命试验 粉尘试验 机械振动与冲击试验 温度/湿度试验 冷热冲击试验 盐雾试验
上海新时达机器人有限公司
安全认证
研发
功能安全
制造
设计
贯穿产品生命周期 - 包括设计、研发、制造、现场安装等全部过程
增强产品可靠性
- 产品标准化,产品规范化, - 产品可靠性增强、产品质量提高
采用标准
伺服系统
机械本体
• 本体设计与开发 • 减速机国际合作
上海新时达机器人有限公司
机器人控制系统
上海新时达机器人有限公司
机器人产品系列
SD500
负载:5kg 半径:500mm
SD700
负载:5kg 半径:700mm
SA1400
负载:6kg 半径:1405mm
SA1800
负载:8kg 半径:1818mm
专注于运动控制、 工业自动化业务
众为兴
SCARA机器人
致力于汽车智能化 柔性焊接生产线的 设计、研发、生产 和销售
晓奥享荣
会通科技
专业从事伺服驱动 系统渠道销售及服 务的企业
新时达将聚焦于机器人与运动控制类新产品的 市场拓展,完善相关业务产业链。
上海新时达机器人有限公司
技术路线
• 脉冲型交流伺服系统 • 20bit绝对值编码技术 • 惯量识别技术
上海新时达机器人有限公司
集团业务领域
电梯 控制驱动
工业 传动
机器人
运动 控制
物联网
新能源
上海新时达机器人有限公司
智能制造业务板块
国投创新一期投资3.36亿元,与新时达共同成立合资公司
依托机器人控制器、驱动器、 系统软件平台等领先技术,为 客户提供最佳的一体化系统解 决方案
新时达 机器人
新时达 运动控制
三位劳动模范
• 国家863项目3项 • 专利324项,其中授权专利229项,发明专利62项;
软件著作权170项 • 主持/参与制定国家技术标准21项 • 国家机器人标准化总体组成员单位 • 承担国家发改委和工信部“高性能伺服驱动器国产替代”项目
上海新时达机器人有限公司
技术中心实验室
环境可靠性实验能力
行业 应用
分拣
弧焊
上下 料
码垛 拆垛
注塑机 打磨 取件 去毛刺
锻造
切割
点焊 涂胶 折弯
立库
冲压
3C行业 ○
√√ √
√
汽车及零部件
√
√
√
钣金行业
√√ √
○
√
金属零件加工 ○
√√
○
○
非金属件生产
√√
○
○
物流包装行业 ○
√
√
橡胶轮胎行业 √
√√
√
√
造船铁路重工
○
○
食品医药行业 ○
√
√
备注:√为已经市场验证的成熟应用
上海新时达机器人有限公司
海外网络
海外公司
德国 香港 巴西(合资) 马来西亚(合资)
产品销往
亚洲、欧洲、北美洲、南美洲、非洲、大洋洲的 65个国家与地区
上海新时达机器人有限公司
机器人核心技术
• 自主控制技术 • SRC控制系统
控制器
软件系统
• 系统平台化开发 • 行业软件功能包
• 自主伺服驱动技术 • RS伺服产品
海外
STEP Sigriner Elektronik GmbH(德国) HONG KONG International STEP Electric Holdings Co., Ltd.(香港) Sigriner Automation (Mfg) Sdn Bhd(马来西亚合资) STEP do Brasil Ltda.(巴西合资)
• 2014年销售收入15.27亿元 科研投入1.06亿元
Progress
• 电梯、橡机等行业市场份额 连续多年位居全国第1位
上海新时达机器人有限公司
新时达股份
国内
上海新时达电气股份有限公司 上海辛格林纳新时达电机有限公司 上海新时达机器人有限公司 上海新时达网络科技有限公司 上海新时达电线电缆有限公司 深圳众为兴技术股份有限公司 上海晓奥享荣汽车工业装备有限公司 谊新(上海)国际贸易有限公司等
○ 为正在市场验证的应用
上海新时达机器人有限公司
测试体系
机器人型式试验
绝缘测试 功能测试 连续运行 性能测试
环境试验
电磁兼容性
保护接地
连续运行
各轴动作范围
工作温度
辐射骚扰试验
绝缘电阻
噪声检验
耐压试验 按钮显示及 连锁功能检验
各轴动作检验
指令动作检验
温升检验 功率检验 电压波动
电源适应能力Biblioteka 验最小定位(姿)时间Electric
Progress
上海新时达机器人有限公司
热烈欢迎 河北科瑞达 肖总 一行
莅临指导
上海新时达机器人有限公司
扫描微信二维码
关注新时达机器人
关心
成长
- EN115-1:2008+A1:2010、IEC62061:2005、 ISO22201:2009
- GB16899-2011、GB/T20438-2006《电气/电子/ 可编程电子安全相关系统的功能安全》
- UTC51628
产品安全认证
- SIL3:减行程电梯控制系统 - SIL2:扶梯安全监控系统
高加速寿命
粉尘
机械振动和冲击
温度/湿度
冷热冲击
盐雾
电波暗室 辐射骚扰试验 辐射抗扰度试验 传导抗扰度试验
屏蔽室(一) 电快速瞬变脉冲群抗扰度试验 浪涌(冲击)抗扰度试验 电压暂降、短时中断和电压变化的抗扰度试验 工频磁场抗扰度试验 脉冲磁场抗扰度试验 谐波电流发射试验 电压波动及闪烁
屏蔽室(二) 传导骚扰试验 静电放电抗扰度试验
• 嵌入式工业控制技术
• 网络型伺服控制技术 • 焊接、码垛、上下料等
上海新时达机器人有限公司
科技创新
• 国家企业技术中心 • 博士后科研工作站 • 国家创新型企业
• 科研人员459人,占员工总数32% • 其中,高级职称16人;博士6人,硕士204人
• 纪德法-上海市工商联主席咨询委员,上海市劳动模范 • 王春祥-国务院政府特殊津贴,全国劳动模范,全国五一劳动奖章 • 马建雄-上海市劳动模范
SD 销售与分销
FI 财务管理
CO 成本控制
SAP ERP
上海新时达机器人有限公司
国内网络
国内市场
9个区域 31个联络处
区域
东北、华北、华南、 西部、上海、浙南、 浙北、江苏、苏州
联络处