新时达STEP机器人程序编程 PPT
工业机器人编程与操作-PPT精选17页PPT
35、不要以为自己成功一次就可以了 ,也不 要以为 过去的 光荣可 以被永 远肯定 。
谢谢你的阅读
❖ 知识就是财富 ❖ 丰富你的人生
71、既然我已经踏上这条道路,那么,任何东西都不应妨碍我沿着这条路走下去。——康德 72、家庭成为快乐的种子在外也不致成为障碍物但在旅行之际却是夜间的伴侣。——西塞罗 73、坚持意志伟大的事业需要始终不渝的精神。——伏尔泰 74、路漫漫其修道远,吾将上下而求索。——屈原 75、内外相应,言行相称。1、别人笑我太疯癫,我笑他人看不 穿。(名 言网) 32、我不想听失意者的哭泣,抱怨者 的牢骚 ,这是 羊群中 的瘟疫 ,我不 能被它 传染。 我要尽 量避免 绝望, 辛勤耕 耘,忍 受苦楚 。我一 试再试 ,争取 每天的 成功, 避免以 失败收 常在别 人停滞 不前时 ,我继 续拼搏 。
STEP机器人快速操作手册-B
9. 选中“AXISPOS”,点击“确认”。
12. “保存”弹出的编程语句。
13. 手动模式下运行程序: 长按三位开关上使能,一直按住示教 器控制面板右侧“ ”键,此时机 器人就会由当前点运动到终点位置, 程序状态栏右上方会变成“ ”;(若 想中途暂停机器人运动,只需松开 “ ”键,状态变为“ ”;若要 继续运行,就再次按下“ ”键;) 运行结束后松开三位开关断使能,此 时状态变为“ ”。
机器人快速操作手册
手册概述
关于本手册
本手册为机器人操作的快速入门手册,旨在短时间内提升客户对机器人的熟 知度。
操作前提
操作机器人前,请务必仔细阅读《STEP 机器人操作安全手册》,用户需在了 解安全知识的基础上才可使用机器人。
目标群体
操作人员 产品技术人员 技术服务人员 机器人程序员
手册说明
本手册内容会有补充和修改,请经常留意我公司网站,更新操作手册。 我公司官方网址:。
5. 依次点击“示教”“OK”,当前点示教完成。 6.“保存”弹出的程序,再点击“新建”。
8
SPD-13-00-B
机器人快速操作手册
7. 点击“运动语句”,选中“PTP”。
8. 选中“pos:Postion”,点击“新建”。
10. 示教要到达的位置点:按下三位开关(一 直按),点动示教器控制面板右侧“+”“-” 键,把机器人移动到自己想要的位置后, 松开三位开关。
LED-Motion 变亮。
4. 上使能保持三位开关 按住,另一只手依次点动示 教器控制面板右侧“+”“-” 按键,确认六个轴可以正常 运行。每一行“+”“-”键代 表各个轴运动的相反方向。 松开按键,机器人停止运动, 松开开关,机器人使能断掉。 (注意:机器人运动过程中 不能断使能,否则会报错)
新时达机器人操作软件使用说明书-B

2.1 机器人安全防护装置 ................................................................................................................ 2 2.1.1 安全防护装置预览 ............................................................................................................. 2 2.1.2 紧急关断按键 ..................................................................................................................... 2 2.1.3 运行方式选择开关 ............................................................................................................. 2 2.1.4 点动运行 ............................................................................................................................. 3 2.1.5 机械终端限位 ..................................................................................................................... 3 2.1.6 软件限位开关 ..................................................................................................................... 3
新时达货梯
名称
电梯动作说明
备注
检修点动运行
全集选控制
慢速自救运行
到站自动开门 保持开门时间的自动
控制
本层厅外开门
关门按钮提前关门
开门按钮开门 重复开门 换站停靠
错误指令取消 反向时自动消指令
满载直驶 到站钟
待梯时轿内照明、风 扇自动断电
自动返基站 人性化手持编程器操
作 故障历史记录 速度设定和反馈曲线
显示
当符合运行条件时,按上/下行按钮可使电梯以检修速度点动运行。即持续按下 按钮电梯运行,松开按钮即停止运行。同样,检修时,电梯在门区内开关门按 钮也为点动关门,自动开门。 在自动状态或司机状态,电梯在运行过程中,按顺向截车原则自动响应上下召 唤按钮信号,任何层楼的乘客,都可通过登记上下召唤信号召唤电梯。 当电梯处于非检修状态下,且未停在平层区。此时只要符合起动的安全要求, 电梯将自动以慢速运行至平层区,开门放客,如果系统认为没有故障会继续正 常运行。 每次平层时,电梯自动开门。 无司机运行时,电梯到站自动开门后,延时若干时间自动关门。如停靠该层时 无召唤信号登记延时 2.5 秒,如有召唤信号延时 4 秒(缺省值)。此延时可在参 数中设置。 如本层召唤按钮被按下,轿门自动打开。如按钮按住不放,门保持打开。超过 1 分钟蜂鸣器将鸣响。 自动状态下,在开门限位动作后,可以按关门按钮使门立即响应关门动作,提 前关门。 电梯停在门区时,可以在轿厢中按开门按钮使电梯已经合上或尚未合上的门重 新打开。 如果电梯持续关门 10 秒后,尚未检测到门锁闭合,电梯就会转换成开门状态。 如果电梯在持续开门 10 秒后,开门限位尚未动作,电梯就会变成关门状态,并 在检测到关门限位和门锁动作后,响应下一个召唤和指令。 乘客按下指令按钮被响应后,发现与实际要求不符,可在指令登记后连按 2 次 错误指令的按钮,该登记将被取消。 当电梯到达最远层站时,所有低于电梯所在层的指令登记全部消除。
新时达STEP机器人程序编程PPT课件

新时达STEP机器人附加轴配置、操作与编程

3
上海新时达电气股份有限公司
World坐标系:固定的直角(笛卡尔)坐标系 Base坐标系:与机器人底座固连的笛卡尔坐 标系 用户自定义坐标系:用户定义的工作台坐标 系或工件坐标系,也是固定的 工具坐标系:与机器人工具固连的笛卡尔坐
EFSYS。其顺序与配置界面中配置的变位机系统顺序相一致。 导轨系统参考坐标系为ERSYS。有且仅有一个导轨系统。
17
上海新时达电气股份有限公司
机器人附加轴操作与编程
带附加轴系统的示教器程序编写
当配置了附加轴系统后,
在示教器程序界面中新建
参考坐标系语句时,备选 项中就会自动出现相应的
附加轴系统坐标系。 Refsys(EAsys),表示当
标系,随机器人的运动而改变。
附加轴坐标系:与外部附加轴系统固连的笛 卡尔坐标系,随附加轴的改变而变化。 关节坐标系:机器人各关节上固定的坐标系, 用于确定机器人的关节角。
4
上海新时达电气股份有限公司
附加轴系统简介
附加轴(外部轴)是除机器人本体以外,为扩展机器人功能或机器人工作空 间额外增加的轴。附加轴根据控制源可以分为异步轴和同步轴。异步轴由控 制柜或外部直接控制,处理较简单,一般不与机器人进行耦合运动;同步轴 由机器人控制器直接控制,可与机器人进行耦合或非耦合的运动,例如变位 机轴和导轨。(注,不同的机器人厂商对附加轴的分类以及定义可能不同) 根据附加轴的组成,可定义不同的附加轴系统。例如一个二轴的变位机,可 以定义为一个附加轴系统,该系统中包含两根附加轴。 耦合与非耦合的说明:耦合是指附加轴的运动会引起机器人的同步运动,非 耦合是指附加轴的运动不会引起机器人运动。机器人与附加轴是否做耦合运 动取决于所选择的参考坐标系。在关节坐标系下,附加轴的运动不会引起机 器人的运动,他们可以独立运动,互不干涉;在笛卡尔坐标系下,附加轴的 运动可能会引起机器人的运动,即机器人的运动始终保证其相对参考坐标系 的位姿不变。
工业机器人编程与操作-PPT精选17页文档
•
6、黄金时代是在我们的前面,急吃不了热汤圆。
•
8、你可以很有个性,但某些时候请收 敛。
•
9、只为成功找方法,不为失败找借口 (蹩脚 的工人 总是说 工具不 好)。
•
10、只要下定决心克服恐惧,便几乎 能克服 任何恐 惧。因 为,请 记住, 除了在 脑海中 ,恐惧 无处藏 身。-- 戴尔. 卡耐基 。
6、最大的骄傲于最大的自卑都表示心灵的最软弱无力。——斯宾诺莎 7、自知之明是最难得的知识。——西班牙 8、勇气通往天堂,怯懦通往地狱。——塞内加 9、有时候读书是一种巧妙地避开思考的方法。——赫尔普斯 10、阅读一切好书如同和过去最杰出的人谈话。——笛卡儿
Thank you
新时达STEP机器人附加轴配置、操作及编程
上海新时达电气股份有限公司
附加轴系统配置说明
注:X Y Z A B C 参数计算规则为:连杆坐标系i先沿x方向移动,再沿 y方向移动,再沿z方向移动,移动到1坐标系原点后,将坐标系i绕x轴 方向转动了一个角度,得到i’ 后,再绕i’的y轴方向转动一个角度得 到i’’,再绕i’’的z轴方向旋转一个角度后,与1重合。那么X Y Z A B C就是从坐标系i经过上面所述规则变换到与1重合所移动和旋转的 量。其中z方向为轴的轴线方向。
7
上海新时达电气股份有限公司
图:附加轴系统配置界面
在
中选择附加轴系统的
个数,下拉菜单中可选择。如果附加轴系统中有导轨,则将使
用导轨复选框选中。
8
上海新时达电气股份有限公司 以两个附加轴系统,并且使用导轨为例,配置说明如下: 将“附加轴系统个数”中选择“2”,勾选复选框“使用导轨”,界面中将显示 如下图:
图:两附加轴系统,并且使用导轨配置界面
9
上海新时达电气股份有限公司 如图,界面中将出现两个附加轴系统和一个导轨系统配置区——“1”,“2”, “”,以1系统配置为例,如图:
图: 单个附加轴系统配置说明图
10
上海新时达电气股份有限公司
说明: 1. 在下拉框中选择该附加轴系统1的轴个数。 2. 在下拉框中选择每个轴的类型,可选直线轴或旋转轴。 3. 在下拉框中选择该附加轴系统所参考的坐标系,如上图选择的 是坐标系,表明该坐标系系统是基于坐标系建立的 4. 配置该附加轴系统的连杆参数。例如,配置了一根附加轴,需 要配置的连杆参数包括“ ”,“1 ”,“ 1”,“ ”,即表格 中非灰色的区域需要填写。 每行的连杆参数信息X Y Z A B C为各连杆间的变换关系。
根据附加轴的组成,可定义不同的附加轴系统。例如一个二轴的变位机,可 以定义为一个附加轴系统,该系统中包含两根附加轴。 耦合与非耦合的说明:耦合是指附加轴的运动会引起机器人的同步运动,非 耦合是指附加轴的运动不会引起机器人运动。机器人与附加轴是否做耦合运 动取决于所选择的参考坐标系。在关节坐标系下,附加轴的运动不会引起机 器人的运动,他们可以独立运动,互不干涉;在笛卡尔坐标系下,附加轴的 运动可能会引起机器人的运动,即机器人的运动始终保证其相对参考坐标系 的位姿不变。
STEP机器人操作安全手册-新时达机器人

STEP 机器人操作安全手册
产品系列:全系列 出版状态:标准 产品版本:B
中国上海新时达机器人有限公司全权负责本控制系统使用说明书 的编制、印刷。 版权所有,保留一切权利。 没有得到上海新时达机器人有限公司的许可,任何单位和个人不 得擅自摘抄、复制本书(软件等)的一部分或全部,不得以任何 形式(包括资料和出版物)进行传播。 版权所有,侵权必究。内容如有改动,恕不另行通知。 All Copyright© reserved by Shanghai STEP Robot Co., Ltd., China. Shanghai STEP Robot Co., Ltd. authorizes in the documenting, printing to this robot control manual. All rights reserved. The information in this document is subject to change withoutprior notice. No part of this document may in any form or by any means(electronic,mechanical,micro-coping,photocopying,recording or otherwise)be reproduced, stored in a retrial system or transmitted without prior written permission from Shanghai STEP Robotics Co., Ltd.
1.1 规章总则 ...............................................................................................................................1 1.2 规章要求 ...............................................................................................................................1 1.3 责任说明 ...............................................................................................................................1
关于Step与KUKA库卡机器人外部自动启动配置总结PPT教案
第21页/共28页
22
六、PLC程序-机器人控制功能块配置
生产线启动机器人的外部启动条件 生产线停止机器人的外部停止条件 该信号常规为“1” 机器人全部工作结束反馈信号
机器人循环自动启动运行条件
第22页/共28页
23
六、PLC程序-机器人控制功能块配置
编写机器人运行过程中暂停条件 提供机器人在HMI翻页后的偏移地址
第27页/共28页
28
感谢您的观看!
第28页/共28页
2021/7/28
29
13
四、机器人外部自动启动时序
对机器人的外部自动启动每一项分步任务均须满足相关条件,并且必须能够将机器人状态报告给 PLC,使用规定的信号交换才能保证机器人正常启动:
1. 接通驱动装置
第13页/共28页
14
四、机器人外部自动启动时序
对机器人的外部自动启动每一项分步任务均须满足相关条件,并且必须能够将机器人状态报告给 PLC,使用规定的信号交换才能保证机器人正常启动:
4. 传递程序号并处理应用程序
第16页/共28页
17
五、机器人程序配置
机器人与PLC 的IO信号配置完成并且启动时序也清楚了,我们现在开始需要编写机器人启动调用 引导程序(即Cell程序)和PLC外部自动控制程序:
初始化 检查是否在原点
机器人回原点轨迹
调用1号程序
等待PLC程序启动信号
调用2号程序
调用3号程序
第17页/共28页
18
六、PLC程序-机器人控制功能块配置
此次KUKA机器人控制功能块采用Fiat提供的Comau机器人标准功能块(FB212),该功能块用 于KUKA机器人控制不能完全适用,但IO信号的时序逻辑基本相似;根据KUKA机器人的启动时序和 应用要求,我们在此块的基础上进行了修改和完善,使之成为GF2项目KUKA机器人PLC程序控制标 准功能块,修改后的功能块也经过了客户评审确认后投入正式使用。
新时达step机器人程序编程

物流自动化
在物流领域,该机器人可以 实现货物的快速分拣、搬运 和码垛,提高了物流运作的 效率和准确性。
医疗设备
新时达Step机器人在医疗设 备领域也有广泛应用,如自 动药物分发、医疗器械的自 动检测等。
服务行业
动态调整
根据机器人实际运行情况动态调整算法参数,以实现 最优性能。
多机器人协同编程
01
02
03
通信协议
建立统一的通信协议,实 现多机器人之间的信息交 互和协同作业。
任务分配
根据机器人性能和任务需 求,合理分配任务人协同作业过程进 行实时监控,根据实际情 况调整机器人行为,确保 任务顺利完成。
自定义库与模块化编程
01
自定义库
根据实际需求,创建自定义库, 封装常用功能和算法,方便程序 调用。
02
03
模块化编程
模块复用
将程序拆分成多个模块,每个模 块负责特定功能,提高代码可读 性和可维护性。
确保模块之间接口规范一致,实 现模块复用,减少重复开发工作 量。
05
案例分析
自动化生产线控制
自动化生产线控制是新时达step机器人程序编程的重要应用 之一。通过编程,机器人可以实现自动化生产线的物料搬运 、装配、检测等任务,提高生产效率,降低人工成本。
在此添加您的文本16字
实现复杂的运动轨迹,如曲线、圆弧和多段线等。
在此添加您的文本16字
考虑机器人的动力学特性和关节限制,确保运动的可行性 和安全性。
传感器应用编程
总结词:利用传感器获取环境信息,实现机器 人与环境的交互和感知。
01
新时达机器人示教器编程规范
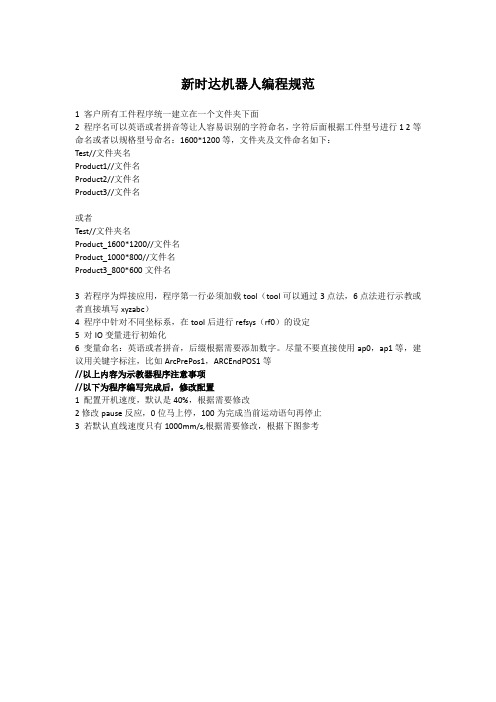
新时达机器人编程规范1 客户所有工件程序统一建立在一个文件夹下面2 程序名可以英语或者拼音等让人容易识别的字符命名,字符后面根据工件型号进行1 2等命名或者以规格型号命名:1600*1200等,文件夹及文件命名如下:Test//文件夹名Product1//文件名Product2//文件名Product3//文件名或者Test//文件夹名Product_1600*1200//文件名Product_1000*800//文件名Product3_800*600文件名3 若程序为焊接应用,程序第一行必须加载tool(tool可以通过3点法,6点法进行示教或者直接填写xyzabc)4 程序中针对不同坐标系,在tool后进行refsys(rf0)的设定5 对IO变量进行初始化6 变量命名:英语或者拼音,后缀根据需要添加数字。
尽量不要直接使用ap0,ap1等,建议用关键字标注,比如ArcPrePos1,ARCEndPOS1等//以上内容为示教器程序注意事项//以下为程序编写完成后,修改配置1 配置开机速度,默认是40%,根据需要修改2修改pause反应,0位马上停,100为完成当前运动语句再停止3 若默认直线速度只有1000mm/s,根据需要修改,根据下图参考焊接规范例程:焊接点使用cp点(笛卡尔坐标点,这样若工具撞了,只要重新试教工具即可,所有点不需要重新试教)此程序为按一下start,程序循环运行,通过Table1或者Table2信号来判断某个工位,若无信号程序一直等待;若希望焊接一遍完成后机器人停止,程序中while(1)不使用While(1)Tool(tool0);//根据需要加载工具Ref(rf0);//根据需要加载坐标系DOSet(Valve1,false);//DO置零初始化Num:=0//变量初始化Table1:=DIRead(DI0);//读取工作台DI信号Table2:=DIRead(DI1); 读取工作台DI信号Dyn(FastSpeed)//设置全局速度Ovl(Ovl90)//设置全局圆滑率,建议90%Ptp(HomePosition);//回原点If (Table1) then//工作台2程序Ptp(ArcPre1)//走到焊接准备点Lin(ArcPos1,ArcPreSpeed,ArcOvl)//直线走到焊接起弧点,速度使用较慢速度走到准备点,圆滑率建议设为0Arcset(Arcdata)//设置电流电压Wlin(ArcPos2,ArcSpeed,ArcOvl)//直线焊接到ArcPos点收弧,使用焊接速度ArcSpeed,圆滑率建议使用0Lin(ArcPos3)//离开收弧点…//完成其他焊接及过度语句End_ifIf (Table2) then//工作台2程序Ptp(ArcPre1)//走到焊接准备点Lin(ArcPos1,ArcPreSpeed,ArcOvl)//直线走到焊接起弧点,速度使用较慢速度走到准备点,圆滑率建议设为0Arcset(Arcdata)//设置电流电压,电压一般为电流1/10左右Wlin(ArcPos2,ArcSpeed,ArcOvl)//直线焊接到ArcPos点收弧,使用焊接速度ArcSpeed,圆滑率建议使用0Lin(ArcPos3)//离开收弧点…//完成其他焊接及过度语句End_ifEnd_while码垛规范例程(使用码垛包)//目前新时达机器人没有ptp和lin之间的圆滑,若ptp和lin之间有卡顿,请全部使用lin 语句,并同时注意ftp中的configurationfile里的机器人配置,直线速度限制,出厂较小,可设置到1800mm/sWhile(1)Dyn(FastSpeed)//设置全局速度Ovl(Ovl90)//设置全局圆滑率,建议90%PalletReset(Pallet1,zero),//对码垛程序清零Bool0:=1;While(bool0)//此标志位若码垛完成变0PTP(HomePos)//回到准备点Ptp(Catch)//走到固定取料点DiWait(LineSignal)//等取料信号DoSet(Valve,True)//夹紧气缸DiWait(ValveOK,True)//等气缸夹紧到位信号Toput(pallet1)//去码垛DoSet(Valve,FALSE)//松开气缸Fromput(pallet1)从码垛处回来End_whileEnd_while搬运规范例程//不使用码垛包,举例4个,while(1)num:=0;//计数清零while(num<4)ptp(HomePos);Lin(PutPos);Posreset(PutPos,offset100,PutPos);Num:=num+1;End_whileend_while多工件程序(伪子程序)假设工件种类通过4路DI输入,构成8421码,在codesys里面做如下编程:Number:dint;SetDint: Step_Robot_SetDINTToHMI;Number:=bool_to_dint(di0)+ 2*bool_to_dint(di1) +4*bool_to_dint(di2)+ 8*bool_to_dint(di3) SetDint(Enable:=1,PortNumber:=0,Data:=Number);//此处端口和示教器的读取数据端口一致以下为示教器程序Num:=DINTEXTRead(DINTEXT)//从plc处读取值,dintext的端口填0If num=1…End_ifIf num=2…End_ifIf num=3…End_ifIf num=4…End_ifCycleStop规范程序//按下停止后,机器人执行完一个cycle再停止While(1)Ptp(a1)Ptp(a2)Ptp(a3)Ptp(a4)Bool0:=DiRead(CycleStop);If bool0=1 thenGoto EndProEnd_ifEnd_whileLP:EndPro自动回原点(倒着走)程序例程DOSET(HomingSig,false)If homing=1 then//如果机器人异常停止,后台获得标志位,程序卸载后重加载,homing 标志位为1Goto HomingProLP:StartProLinNum:=0;//初始化DINTSet(DintExt,LinNum);Ptp(a1)LinNum:=1;DINTSet(DintExt,LinNum);Ptp(a2)LinNum:=2;DINTSet(DintExt,LinNum);Ptp(a3)LinNum:=3;DINTSet(DintExt,LinNum);Ptp(a4)LinNum:=4;DINTSet(DintExt,LinNum);Goto(StartPro)LP: HomingProif LinNum=3 thengoto LIN3end_ifif LinNum=2 thengoto LIN2end_ifif LinNum=1 thengoto LIN1end_ifif LinNum=0 thengoto LIN0end_ifLP:LIN3Ptp(ap3);LP:LIN2Ptp(ap2);LP:LIN1Ptp(ap3);LP:LIN0Ptp(ap0);DOSET(HomingSig,true)//告诉codesys,对homing标志位置0。
新时达机器人 焊接编程
焊机功能介绍——基本焊接功能
WLin(pos,dynamic,overlap,oritype,weavedata,trackdata)
专门用于控制机器人在焊接过程中走一条直线,该语句只适用于焊接功能, 只能在ARCON与ARCOFF之间使用。 变量说明:pos为末端点位置,dynamic设置动态参数,overlap为圆滑参数, weavedata为摆弧参数,trackdata为跟踪参数,只有注册了摆弧和跟踪功能后 才可用。
18
上海新时达电气股份有限公司
焊机功能介绍——摆弧功能
摆弧功能对应参数WeaveData,该结构体变量由weave_ type(摆弧类型)、 weave_ shape(摆弧形状)、weave_length(摆弧长度)、weave_width(摆弧 宽度)、pausetime_L(摆弧左停留时间)、pausetime_R(摆弧右停留时间) 组成。
24
上海新时达电气股份有限公司
焊机功能介绍——跟踪功能
通过高速电流采集模块,实时采集电流数据,用于焊接作业中的路径纠偏。 能够实时地补偿焊缝横向偏差和纵向偏差,对于长焊缝焊接过程中的工件变 形和焊缝本身存在误差的情况,效果明显。 注意:电弧跟踪必须和摆弧一起使用,不能单独使用电弧跟踪。
25
上海新时达电气股份有限公司
29
上海新时达电气股份有限公司
焊机功能介绍——一维寻位
CORR1_D: 1维矫正
这个矫正指令用于工件只有一个方向上的线性偏置:长度,宽度,或高度
矫正指令会重写前面矫正指令的数据。
30
上海新时达电气股份有限公司
焊机功能介绍——一维寻位实例
WHILE(1)DO//设置循环,可不设置,仅为演示 Lin(midpos,dyn0); Lin(rap0,dyn0); //走至寻位起始点 Search_T(via0,cd0,pat0); //执行寻位语句。via0为寻位语句的中间点,用于确定寻位方向; cd0存放寻位偏差量信息;pat0中包含了寻位的相关参数,如寻 位速度、寻位范围等。 CORR_1D(cd0); //偏差量矫正; Lin(midpos,dyn0); Lin(spos1,dyn0); ARCSET(arcdata0); ARCON(arcondata0); WLin(epos,dyn1); ARCOFF(arcoffdata0); //完成焊接 Lin(midpos,dyn0);回到中间点 CORR_OFF();//偏差矫正结束 END_WHILE
新时达STEP机器人附加轴配置、操作与编程ppt课件
上海新时达电气股份有限公司
图:附加轴系统配置界面
在
中选择附加轴系统的
个数,下拉菜单中可选择。如果附加轴系统中有导轨,则将使
用导轨复选框选中。
8
上海新时达电气股份有限公司 以两个附加轴系统,并且使用导轨为例,配置说明如下: 将“附加轴系统个数”中选择“2”,勾选复选框“使用导轨”,界面中将显示 如下图:
11
上海新时达电气股份有限公司
附加轴系统配置说明
注:X Y Z A B C 参数计算规则为:连杆坐标系i先沿x方向移动,再沿 y方向移动,再沿z方向移动,移动到i+1坐标系原点后,将坐标系i绕x 轴方向转动了一个角度,得到i’ 后,再绕i’的y轴方向转动一个角度 得到i’’,再绕i’’的z轴方向旋转一个角度后,与i+1重合。那么 Y Z A B C就是从坐标系i经过上面所述规则变换到与i+1重合所移动和 旋转的量。其中z方向为轴的轴线方向。
5
上海新时达电气股份有限公司
附加轴系统的耦合与非耦合
表 在不同坐标系下,导轨运动与机器人运动关系
参考的坐标系
导轨运动,机器人是否运动 变位机运动,机器人是否运动
关节坐标系Joint
否
否
世界坐标系World
是
否
基坐标系Base
否
否
工具坐标系Tool
是
否
变位机坐标系ExSys
是
是
用户自定义坐标系UserSys 是
12
上海新时达电气股份有限公司
机器人附加轴配置示例
方法不唯一,如何最好的确定附加轴坐标系? 附加轴坐标系的配置从何下手?
13
上海新时达电气股份有限公司
附加轴系统举例——杰宝变位机系统配置
新时达机器人示教器编程规范.docx
新时达机器人编程规范1 客户所有工件程序统一建立在一个文件夹下面2 程序名可以英语或者拼音等让人容易识别的字符命名,字符后面根据工件型号进行1 2 等命名或者以规格型号命名:1600*1200 等,文件夹及文件命名如下:Test//文件夹名Product1// 文件名Product2// 文件名Product3// 文件名或者Test//文件夹名Product_1600*1200// 文件名Product_1000*800// 文件名Product3_800*600 文件名3 若程序为焊接应用,程序第一行必须加载tool (tool 可以通过3点法,6点法进行示教或者直接填写xyzabc)4 程序中针对不同坐标系,在tool 后进行refsys(rf0 )的设定5 对IO 变量进行初始化6 变量命名:英语或者拼音,后缀根据需要添加数字。
尽量不要直接使用ap0,ap1 等,建议用关键字标注,比如ArcPrePosI, ARCEndPOSI等// 以上内容为示教器程序注意事项// 以下为程序编写完成后,修改配置1 配置开机速度,默认是40%,根据需要修改2 修改pause 反应,0 位马上停,100 为完成当前运动语句再停止3 若默认直线速度只有1000mm/s, 根据需要修改,根据下图参考5leramp|玳即旳斯的丫使.Cartesian TOverlapping 艇I 呻EOvFifip raiius ckstanoemmern 匿sc^ 魁Wtor:^09iHedixed speed匚irt pEith vetocVt单:'引1 血mim蒔OrienEatlon ^seedk 1 加血\AutDffflatic- Manual Repwhonin毎ftlocity・ 0 —Axit:iom Cart path: 1BOC mrn” Cart orieinlatlan! »J0Acceemcm■U UW1 _Avi5-tOOH Cart path : rrrnFsT cart orteinialliin; 4150.0JerkJ —如iH(xm c«rr patn: 亦/門亦on:IMMJ.O焊接规范例程:焊接点使用cp点(笛卡尔坐标点,这样若工具撞了,只要重新试教工具即可,所有点不需要重新试教)此程序为按一下start,程序循环运行,通过Tablel或者Table2信号来判断某个工位,若无信号程序一直等待;若希望焊接一遍完成后机器人停止,程序中while( 1)不使用While( 1)Tool(toolO);//根据需要加载工具Ref(rfO);〃根据需要加载坐标系DOSet(Valve1,false);//DO 置零初始化Num:=0〃变量初始化Table1:=DIRead(DI0);〃读取工作台DI 信号Table2:=DIRead(DI1);读取工作台DI 信号Dyn (FastSpeed)//设置全局速度Ovl(Ovl90)〃设置全局圆滑率,建议90%Ptp(HomePosition);〃回原点If (Table1) then〃工作台2 程序Ptp(ArcPre1)//走到焊接准备点Lin(ArcPos1, ArcPreSpeed, ArcOvl)//直线走到焊接起弧点,速度使用较慢速度走到准备点,圆滑率建议设为0Arcset(Arcdata)//设置电流电压Wlin( ArcPos2,ArcSpeed,ArcOv)// 直线焊接到ArcPos 点收弧,使用焊接速度ArcSpeed,圆滑率建议使用0Lin (ArcPos3) II离开收弧点••〃完成其他焊接及过度语句En d_ifIf (Table2) the nil工作台2 程序Ptp(ArcPrel)//走到焊接准备点Lin(ArcPos1, ArcPreSpeed, ArcOvI)//直线走到焊接起弧点,速度使用较慢速度走到准备点,圆滑率建议设为0Arcset(Arcdata)//设置电流电压,电压一般为电流1/10左右Wlin( ArcPos2,ArcSpeed,ArcOv)// 直线焊接到ArcPos 点收弧,使用焊接速度ArcSpeed,圆滑率建议使用0Lin( ArcPos3) //离开收弧点••//完成其他焊接及过度语句En d_ifEn d_while码垛规范例程(使用码垛包)//目前新时达机器人没有ptp和lin之间的圆滑,若ptp和lin之间有卡顿,请全部使用lin 语句,并同时注意ftp中的con figurati on file里的机器人配置,直线速度限制,出厂较小,可设置到1800mm/sWhile(1)Dyn (FastSpeed)//设置全局速度Ovl(Ovl90)〃设置全局圆滑率,建议90%PalletReset ( Palletl, zero), // 对码垛程序清零Bool0: =1;While (bool0) //此标志位若码垛完成变0PTP ( HomePos) //回到准备点Ptp (Catch) //走到固定取料点DiWait ( LineSignal) // 等取料信号DoSet ( Valve, True) // 夹紧气缸DiWait(ValveOK,True)〃等气缸夹紧到位信号Toput (palletl ) // 去码垛DoSet ( Valve, FALSE 〃松开气缸Fromput (palletl )从码垛处回来En d_whileEn d_while搬运规范例程〃不使用码垛包,举例4个,while(1)num:=0;〃计数清零while( num<4)ptp(HomePos);Lin( PutPos);Posreset (PutPos, offset100 , PutPos);Num : =num+1 ;End_whileend_while多工件程序(伪子程序)假设工件种类通过4路DI输入,构成8421码,在codesys 里面做如下编程:Number:dint;SetDint: Step_Robot_SetDINTToHMI;Number:=bool_to_dint(di0)+ 2*bool_to_dint(di1) +4*bool_to_dint(di2)+ 8*bool_to_dint(di3)SetDint(Enable:=1,PortNumber:=0,Data:=Number);// 此处端口和示教器的读取数据端口一致以下为示教器程序Num : =DINTEXTRead( DINTEXT 〃从pic 处读取值,dintext 的端口填0If num=1End_ifIf num=2End_ifIf num=3End_ifIf num=4End_ifCycleStop规范程序/按下停止后,机器人执行完一个cycle再停止Whiie(1)Ptp( a1)Ptp( a2)Ptp( a3)Ptp ( a4)Booi0:=DiRead(CycieStop);If booi0=1 thenGoto EndProEnd_ifEnd_whiieLP:EndPro自动回原点(倒着走)程序例程DOSET(HomingSig,false)If homing=1 then// 如果机器人异常停止,后台获得标志位,程序卸载后重加载,标志位homing 为1Goto HomingProLP:StartProLinNum :=0;// 初始化DINTSet(DintExt,LinNum);Ptp ( a1)LinNum :=1;DINTSet(DintExt,LinNum);Ptp ( a2)LinNum :=2;DINTSet(DintExt,LinNum);Ptp ( a3)LinNum :=3;DINTSet(DintExt,LinNum);Ptp( a4)LinNum :=4;DINTSet(DintExt,LinNum);Goto(StartPro)LP: HomingProif LinNum=3 thengoto LIN3end_ifif LinNum=2 thengoto LIN2end_ifif LinNum=1 thengoto LIN1end_ifif LinNum=0 thengoto LIN0end_ifLP:LIN3Ptp(ap3);LP:LIN2Ptp(ap2);LP:LIN1Ptp(ap3);LP:LIN0Ptp(ap0);DOSET(HomingSig true)// 告诉codesys,对homing 标志位置0。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
常用运动指令与效果
PTP Lin Circ CircleAngle WaitTime
6
常用运动指令与效果
PTP
PTP是点到点 的运动方式,是 让机器人从当 前位置到达所 标定的位置A
位置A在这个地方标定
7
常用运动指令与效果
Lin
Lin也是到点到点的运动 方式,是让机器人从当前 位置到达,所标定的位置 A,但与PTP区不在于路 程在空间上是直线运动
41
感谢您的聆听!
20
范例
打开并编辑程序
21
范例
打开并编辑程序
这个地方 一定要选 中才能新 建
22
范例
打开并编辑程序
Axispos表示 数据储存 类型是每 个关节轴 的角度
23
范例
打开并编辑程序
Cartpos表示数据 储存类型是末端 的笛卡尔空间下 的坐标与姿态
24
范例
打开并编辑程序
选择变量 类型
25
范例
37
范例
加载并运行程序
setPC会使程序立刻从 所选行数开始运行
38
范例
加载并运行程序
新程序测试的时候建议切换T2(手动模式)按住start 跑一边,确认无问题了再切回A(自动模式)运行
39
奇异点处理
位置、速度超 限都有估计是 奇异点问题
40
奇异点处理
遇到奇异点的话,先判断问题:是速度超限依然位置超限, 然后确认通过路径上容易超限的地方,然后在这个位置上 往其她方向偏移多设置一个中间点,避开奇异位置; 注意:奇异点报错后,需要确认错误,否则机器人可不能工作。
新时达STEP机器人程序编程
目录
1 工程程序概述 2 常用运动指令与效果 3 范例
4 奇异点处理
2
工程程序概述
什么是工程?什么是程序? 变量分全局变量(global)、工程变量 (project)、程序变量(program)区不在 哪里?
3
工程程序概述
工程:是一个全面的、大型的、复杂的包罗各子项目的系统, 它是由特别多程序组成。 程序:工程下的具体执行部分,在程序中编写语言,机器人会 依照程序语言去执行操作。
打开并编辑程序
将机器人移动 到想要到的第 一个点再示教
26
范例
打开并编辑程序
27
范例
打开并编辑程序
重复之前的方 法,编写第二个 点
28
范例
打开并编辑程序
接下来让程序 反复运动需要 用到while语句
29
范例
打开并编辑程序
30
范例
打开并编辑程序
31
范例
打开并编辑程序
32
范例
打开并编辑程序
4
工程程序概述
关于变量
由于不同工程下的变量定义不同,同一名字的变量并不一定 一样,同样的程序也是如此;因此变量在习惯范围上有3种 类型: 全局变量(global) 这种类型变量习惯所有工程与程序,例如重力加速度 工程变量(project) 这种类型变量习惯单一某项工程,该工程下所有程序皆可调用 程序变量(program) 这种类型变量只会用在特定单个程序,即便其她程序也使用 同样名称变量,也可不能受到干扰。
位置A在这个地 方标定
8
常用运动指令与效果
Circ
Circ语句是让机器 人以当前点为起 始点,A点为中间 点,B点为终点,走 一段圆弧
位置A在这个地方标定 位置B在这个地方标定
9
常用运动指令与效果
CircleAngle
CircAngle语句是其 她都与Cir一样,但 多出的angle角是 走起始点、A与B 三个点所确定圆 的角度
10
常用运动指令与效果
WaitTime
让机器人暂停 不动的函数,暂 停时间能够由 uint类型的变量 设置
11
新建工程
工程
程序
13
范例
新建工程
14
范例
新建工程
15
范例
新建工程,完成
16
范例
新建程序
17
范例
新建程序
18
范例
新建程序,完毕
19
范例
打开并编辑程序
打开与加载的区 不是前者并可不 能运行,只能编 辑。而后者不仅 能够编辑且能够 运行。
将主要循环的 函数放在while 回圈里面
33
范例
打开并编辑程序
选中第一行去 粘贴,目标位置 是选中位置的 上面一行
34
范例
打开并编辑程序
35
范例
加载并运行程序
进入工程界面, 要加载一个程序 必须先把之前的 关闭
36
范例
加载并运行程序
这个标志是程序 加载后才会出现, 表示目前程序正 在执行的行