PLC第5章
S7-1200 PLC应用教程第5章

图5-3和图5-4是实现上述功能的PLC的外部接线图和梯形图。将继电器电路 图转换为梯形图时,首先应确定PLC的输入信号和输出信号。图5-4中I0.2的常 闭触点对应于SB1和FR的常闭触点串联电路。
为了防止出现三相电源瞬间短路的事故,除了梯形图中Q0.0和Q0.1的常闭触 点组成的软件互锁电路,还应在PLC的输出回路设置由KM1和KM2的辅助常闭 触点组成的硬件互锁电路。
联了I0.4 的常闭触点,小车走到右限位开关SQ2处时,使Q0.0的线圈断电。同
时I0.4的常开触点闭合,T1的线圈通电,开始定时。8s后定时时间到,”T1”.Q
的常开触点闭合,使Q0.1的线圈通电并自保持,小车开始左行。离开限位开关
SQ2后,I0.4的常开触点断开,T1因为其线圈断电而被复位。小车运行到左边
的起始点时,左限位开关SQ1的常开触点闭合,I0.3的常闭触点断开,使Q0.1
的线圈断电,小车停止运动。
5.2 顺序控制设计法与顺序功能图 所谓顺序控制,就是按照生产工艺预先规定的顺序,在各个输入信号的作用
下,根据内部状态和时间的顺序,在生产过程中各个执行机构自动地有秩序地 进行操作。顺序控制设计法首先根据系统的工艺过程,画出顺序功能图,然后 根据顺序功能图画出梯形图。 5.2.1 顺序功能图的基本元件
假设起动小车左行,碰到左限位开关时,I0.3的常闭触点使Q0.1的线圈“断 电”,小车停止左行。I0.3的常开触点接通,使Q0.0的线圈“通电”开始右行。
碰到右限位开关时,小车停止右行,开始左行。以后将这样不断地往返运动, 直到按下停车按钮。
4.较复杂的小车自动运行控制程序的设计 控制要求如下: 1)按下右行起动按钮SB2,小车右行。 2)走到右限位开关SQ2处停止运动,延时8s后开始左行。 3)回到左限位开关SQ1处时停止运动。 在异步电动机正反转控制电路的基础上,在控制右行的Q0.0的线圈回路中串
PLC基础与应用课件-第5章 置位与复位

日期:2020/10/25
页码: 10
西门子S7-300 PLC 基础与应用
第5章 置位复位指令的应用
用户块
(3) 功能(FC) 功能FC(Function)与功能块的根本区别在于没有自己的存 储区,即没有指定的背景数据块,不能存储信息,调用时必 须向形参配实参。功能一般用于编制重复发生并且复杂的自 动化程序。 (4) 数据块(DB) 数据块DB(Data Block)中包含程序所使用的数据。根据使用 方式的不同,数据块分为全局数据块和背景数据块两种。全 局数据块又称为共享数据块,用于存储全局数据,所有逻辑 块都可以全局数据块内存储的信息。背景数据块作为块的局 部数据,是与被指定的功能块相关联的。
OB100为暖启动组织块,即初始化程序,只在PLC上电的第一个 周期执行一次。
日期:2020/10/25
页码: 9
西门子S7-300 PLC 基础与应用
第5章 置位复位指令的应用
用户块
(2)功能块(FB) 功能块FB(Function Block)是用户自己编写的程序
块,相当于高级语言的子程序。它是通过数据块参数而调 用的,有自己的存储区(背景数据块),通过背景数据块 传递参数。自身带有以名称方式给出的形式参数,被其他 程序块调用时,可以将实际参数赋值给实际参数。所以, 调用任何一个功能块FB时,必须制定一个背景数据块。
西门子S7-300 PLC 基础与应用
第5章 置位复位指令的应用
置位与复位指令(3/3)
I1.0 I1.1 I1.2 Q2.0
(a)梯形图
(b)工作时序
图3-1 置位和复位指令工作时序
日期:2020/10/25
页码: 4
西门子S7-300 PLC 基础与应用
PLC原理及应用第5章 习题及答案

第5章习题及答案1.S7-200 系列PLC如何直接寻址?什么是间接寻址?PLC的存储单元按字节进行编址,无论所寻址的是何种数据类型,通常应指出它所在区域的字节地址。
每个单元都有唯一的地址,这种直接指出元件名称的寻址方式称为直接寻址。
包括①位寻址格式:元件名称、字节地址和位号,如I0.5;②特殊器件的寻址格式:直接写出其编号,如T33,既表示T33定时器的位状态信息,又表示该定时器的当前值;③字节、字和双字的寻址格式:指明元件名称、数据类型和存储区域的首字节地址,如IB0,QW0为QB0和QB1两字节,VD0为VW0、VW2两字。
间接编址使用指针存取内存中的数据。
指针是包含另一个内存位置地址的双字内存位置。
只能将V内存位置、L内存位置或累加器寄存器(AC1、AC2、AC3)用作指针。
欲建立指针,必须使用"移动双字"指令,将间接编址内存位置移至指针位置。
指针还可以作为参数传递至子程序。
欲间接存取内存区数据,输入一个"和"符号(&)和需要编址的内存位置,建立一个该位置的指针。
指令的输入操作数前必须有一个"和"符号(&),表示内存位置的地址(而并非内存位置的内容)将被移入在指令输出操作数中识别的位置(指针)。
2.S7-200 系列PLC共有几种定时器?它们的运行方式有何不同?对它们执行复位指令后,它们的当前值和位的状态是什么?共有3种定时器,它们是:接通延时定时器(TON):用于单一间隔的定时,使能输入接通后当前值从0开始计时,当定时器的当前值大于等于预设值时,该定时器位被置位,即定时器位ON;使能输入断开,定时器自动复位,当前值为0,定时器位OFF。
有记忆接通延时定时器(TONR):用于对许多间隔的累计定时,使能输入接通时,定时器位为OFF,当前值从上次的保持值继续计时。
使能输入断开,定时器位和当前值保持最后状态。
使能输入再次接通时,当前值从上次的保持值继续计时,当当前累积值达到预设值时,定时器位ON;TONR定时器只能用复位指令如进行复位操作。
《PLC应用技术》第5章参考答案

思考与练习参考答案
1. 答:只具有接通(ON或1)或断开(OFF或0)两种状态的元件称为位元件。
字元件是位元件的有序集合。
FX系列的字元件最少4位,最多32位。
字元件有位组件和T、C、D、V、Z等寄存器。
2. 解:
K1X0:X3~X0、4位
K2M10:M17~M10、8位
K8M0:M31~M0、32位
K4S0:S15~S0、16位
K2Y0:Y7~Y0、8位
K3X10:X23~X10、12位
3. 答:16位数据寄存器所能表示的有符号数的范围为K-32 768~32 767。
所能表示的十六进制数的范围为H0~H0FFFF。
32位数据寄存器所能表示的有符号数的范围为K-2 147 483 648~2 147 483 647,所能表示的十六进制数的范围为H0~H0FFFF FFFF。
4. 答:Y0、Y2状态为1,Y1、Y3状态为0。
5. 解:
9. 解:
10. 解:
12. 解:
15. 解:设数据由K1X0构成。
16. 解:程序运行结果如下图所示。
17. 解:
18. 解:
21. 解:
23. 解:(D0)的数据为H0A2B1;(M8022)为1。
24. 答:(D0)数据为H0B1A2,(M8022)为1。
26. 答:Y17~Y0的各位状态为0000 0000 1001 1001 。
27. 解:设X0为启动按钮,X1为停止按钮。
29. 解:。
电气控制与PLC实训章 (5)
辅助继电器的常开、常闭接点在PLC内可无限次使用。
第பைடு நூலகம்章
4) 状态器(S) 状态器S是构成状态转移图的重要器件,它与后述的步进顺 控指令配合使用。通常,状态器软件有下面五种类型: (1) 初始状态器S0~S9共10点。 (2) 回零状态器S10~S19共10点。 (3) 通用状态器S20~S499共480点。 (4) 保持状态器S500~S899共400点。 (5) 报警用状态器S900~S999共100点。这100个状态器器件 可用作外部故障诊断输出。 S0~S499没有断电保持功能,但是用程序可以将它们设定为 有断点保持功能的状态。状态器的常开、常闭接点在PLC内可以 使用,且使用次数不限。不用步进顺控指令时,状态器S可以作 辅助继电器M在程序中使用。此外,每一个状态继电器还提供一 个步进触点,称为STL触点,在步进控制的梯形图中使用。
第5章 图5.6 ANB指令使用说明(一)
第5章 图5.7 ANB指令使用说明(二)
第5章
6. 多重输出指令MPS、MPD、MPP (1) MPS:进栈指令; (2) MRD:读栈指令; (3) MPP:出栈指令。 PLC中有11个存储运算中间结果的存储器,称为栈存储器。 进栈MPS指令就是将运算中间结果存入栈存储器。使用一次MPS指 令,该时刻的运算结果就压入栈存储器第一级,再使用一次MPS 指令,此次的运算结果压入栈的第一级,上一次压入的数据依次 向栈的下一级移动。 使用出栈指令MPP就是将存入栈存储器的各数据依次上移, 最上级数据读出后就从栈内消失。
第5章
(3) 特殊辅助继电器M8000~M8255(256点)。PLC内有256个 特殊辅助继电器,这些特殊辅助继电器各自具有特定的功能,通 常分为下面两大类。
第5章 PLC的程序设计及应用
Programmable Controller—PLC
7. 延时接通/断开电路 如图5-18所示,当X001为ON时,定时器T1得电开始计 时,延时10s后,Y001接通并自保。当X001为OFF时,定时器 T2接通并开始计时,经8s延时后,Y001失电断开。
X001 ( T1 X001 ( T2 T2 ( Y001 Y001 ) K100 K80 ) )
X001 T1 ( T2 T2 ( T1 K20 K20
Programmable Controller—PLC
9. 分频电路 在许多控制场合,需要对控制信号进行分频。图5-20是二 分频电路的梯形图和时序图。在梯形图中用了三个辅助继电 器,分别为M10、M20和M30。
X001 M20 ( M10 ) )
Programmable Controller—PLC
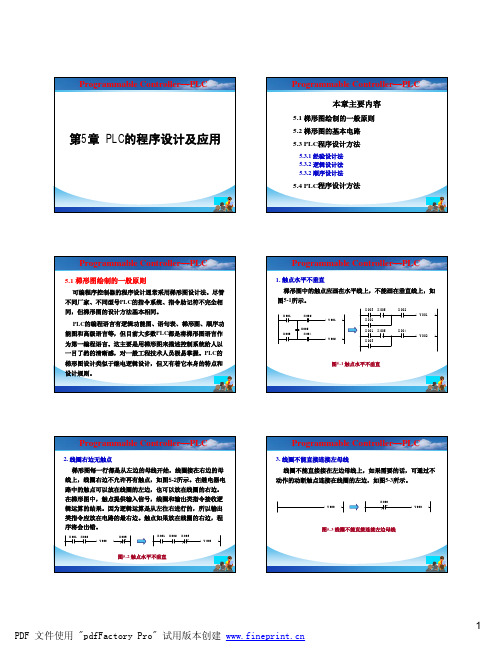
1. 触点水平不垂直 梯形图中的触点应画在水平线上,不能画在垂直线上,如 图5-1所示。
X003
X001 X002 ( Y001 X005 X003 X004 ( Y002 ) )
X005
X002 ( Y001 )
X001 X001 X003 X005 X004 ( Y002 )
图5-1 触点水平不垂直
Programmable Controller—PLC
2. 线圈右边无触点 梯形图每一行都是从左边的母线开始,线圈接在右边的母 线上,线圈右边不允许再有触点,如图5-2所示。在继电器电 路中的触点可以放在线圈的左边,也可以放在线圈的右边。 在梯形图中,触点提供输入信号,线圈和输出类指令接收逻 辑运算的结果。因为逻辑运算是从左往右进行的,所以输出 类指令应放在电路的最右边。触点如果放在线圈的右边,程 序将会出错。
第五章 PLC的基本指令及程序设计
(4)RI,立即复位指令
用立即复位指令访问输出点时,从指令
所指出的位(bit)开始的N个(最多为 128个)物理输出点被立即复位,同时, 相应的输出映像寄存器的内容也被刷新。 用法: RI bit, N 例: RI Q0.0,1 应用举例:
LD = =I SI
I0.0 //装入常开触点 Q0.0 //输出触点,非立即 Q0.1 //立即输出触点 Q0.2, 1 //从 Q0.2 开始的 1 个 //触点被立即置 1
图5.4 LPS,LRD,LPP指令的操作过程
逻辑推入栈 逻辑读栈 逻辑弹出栈
前 iv0 iv1 iv2 iv3 iv4 iv5 iv6 iv7 iv8
后 iv0 iv0 iv1 iv2 iv3 iv4 iv5 iv6 iv7
前 iv0 iv1 iv2 iv3 iv4 iv5 iv6 iv7 iv8
T32,T96 T33~T36,T97~T100 T37~T63,T101~T255
3. 定时器指令格式
TON
通电延时型
TONR 有记忆通电延时型
TOF 断电延时型 IN—使能输入端;编程范围T0~T255; PT是预置值输入端,最大预置值32767;PT 数据类型:INT。PT寻址范围见附表1。
NETWORK 1 LD I0.0 S Q0.0, 1 NETWORK 5 LD I0.1 R Q0.0, 1
I0.0 I0.1 Q0.0
5.1.4 边沿触发指令(脉冲生成)
用途:边沿触发是指用边沿触发信号产生一个机器周 期的扫描脉冲,通常用作脉冲整形。 分类:边沿触发指令分为正跳变触发(上升沿)和负 跳变触发(下降沿)两大类。 正跳变触发指输入脉冲的上升沿,使触点ON一 个扫描周期。负跳变触发指输入脉冲的下降沿,使触 点ON一个扫描周期。 EU(Edge Up)正跳变, 无操作元件 ED(Edge Down)负跳变, 无操作元件
PLC5章状态转移图及编程方法

(2) 台车后退碰到限位开关SQ2后,台车电机M停转,台车停 车,停5 s,第二次前进,碰到限位开关SQ3,再次后退。
(3) 当后退再次碰到限位开关SQ2时,台车停止(或者 继续下一个循环)。
5.1 状态转移图及状态功能
PLC程序设计步骤
• 根据可编程序控制器系统硬件结构和生产工艺要求,在软件规格说 明书的基础上,用相应的编程语言指令,编制实际应用程序并形成 程序说明书的过程就是程序设计。
• PLC程序设计一般分为以下几个步骤: • 程序设计前的准备工作。 • 程序框图设计。 • 程序测试。 • 编写程序说明书。
1.程序设计前的准备工作
• 在熟悉被控对象的同时,还要认真借鉴前人在程 序设计中的经验和教训,总结各种问题的解决方 法——哪些是成功的,哪些是失败的,为什么。 总之,在程序设计之前,掌握东西越多,对问题 思考得越深入,程序设计就会越得应手。
• 3)充分利用手头的硬件和软件工具例如, 硬件工具有:编程器、GPC(图形编程器)、 FIT(工厂智能终端);编程软件有:LSS、 SSS、CPT、CX—ProgTammer、西门子STEP7 如果是利用计算机编程,可以大大提高编 程的效率和质量。
(3) 只要在不相邻的步进段内,则可重复使用同一编号的 计时器。这样,在一般的步进控制中只需使用2~3个计时器 就够了,可以节省很多计时器。
(4) 状态也可以作为一般中间继电器使用,其功能与M一 样,但作一般中间继电器使用时就不能再提供STL触点了。
5.2 单流程状态转移图的编程
第三步:设计步进梯形图
状态的转移条件可以是单一的,也可以是多个元件的串、 并联组合,如图所示。
电气控制与PLC原理及应用(第二版)周亚军章 (5)

第5章 可编程控制器概述
第5章 可编程控制器概述
(5) 定时与计数功能不同。继电接触器控制系统采用的定 时器体积大、精度低、调整困难,一般不具备计数功能;PLC 则有大量的软定时器和计数器,精度高、范围宽、调整 方便。
(6) 设计与调试方式不同。继电接触器系统设计方法有限, 对于复杂继电接触器系统缺少通用的解决办法,设计完成的线 路硬件元件和连线众多,施工工作量大,调试过程中发现问题 所需修改周期长。
3.闭环过程控制 目前,PLC都具有模拟量输入/输出功能及PID控制功能, 可以对温度、压力、流量等模拟量实现闭环控制。解决方案也 非常灵活,既可以采用软件PID指令实现控制功能,也可以采 用硬件PID模块,后者通过增加硬件成本减轻了软件设计工作 量,实时性好,更适合对象比较复杂的生产设备。
第5章 可编程控制器概述
另外,在数字量I/O点数、模拟量I/O点数及各类模块的数 量上都朝着大容量发展,如西门子S7-400可扩展到32 KB DI/DO。由于控制系统规模上去了,用户程序量必然也会增加, 所以PLC大型化也包含存储容量的增加。
第5章 可编程控制器概述
2.微型化、多功能化趋势 大型化是为了拓展PLC的应用领域,而在PLC的强项——小 型设备的控制上,则需要在降低成本、提高速度、改善结构方 面作出努力。微型化、多功能化可以使控制系统体积减小、成 本下降、结构趋于模块化,配置灵活,易于改造。目前,超小 型PLC的I/O点数少则几个,多则数百个,甚至个别的超小型 PLC可以扩展到上千个。如此规模即便是复杂对象也能胜任。
第五章 PLC基本指令系统----计数器+典型案例

1L
Q0.0 Q0.1
Q0.2
Q0.3
S7200 CPU 222
1M
I0.0
I0.1
M L+
DC 24V
停止按钮SB1 启动按钮SB2
脉冲的上升沿(由0到1)信号时,计数器的当前值减1。当计数器当前值等于或大于设定值 (PV)时,该计数器位被置1。当复位输入端(R)有效或用复位指令(R)对计数器执行复 位操作时,计数器被复位,即计数器位为0,且当前值清零。
《第5章 PLC基本指令系统》
五、S7-200 PLC的基本指令
11. 计数器指令
《第5章 PLC基本指令系统》
六、典型控制环节的PLC程序设计 2、大功率电动机的星-三角减压起动控制程序
输入信号
停止按 I0.0 钮SB1
起动按 I0.1 钮SB2
输出信号 接触器 Q 0.1 KM1
接触器 Q 0.2 KM2
接触器 Q 0.3 KM3
FR
KM1
KM2
KM3
~
KM3
KM2
1L
Q0.0 Q0.1
《第5章 PLC基本指令系统》
五、S7-200 PLC的基本指令
12. 比较指令
比较指令是将两个数值或字符串按指定条件进行比较,比较条件成立时,比较触点就闭合。 所以比较指令实际上也是一种位指令。
类型: 按两个操作数的数据类型分:字节比较、整数比较、双字整数比较和实数比较。 比较指令的运算符有6种: ==(等于)、>(大于)、>=(大于等于)、<(小于)、<=(小于等于) 和 <>(不等于)。
C21当前值 0
C21位
//计数值为0时接通Q0.0
永宏PLC指令篇第5章(5-1~5-12)
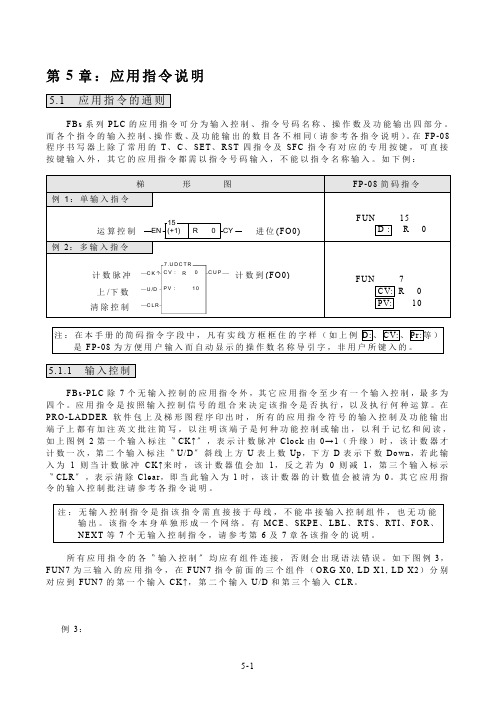
第5章:应用指令说明5.1应用指令的通则FBs系列PLC的应用指令可分为输入控制、指令号码名称、操作数及功能输出四部分。
而各个指令的输入控制、操作数、及功能输出的数目各不相同(请参考各指令说明)。
在FP-08程序书写器上除了常用的T、C、SET、RST四指令及SFC指令有对应的专用按键,可直接按键输入外,其它的应用指令都需以指令号码输入,不能以指令名称输入。
如下例:5.1.1输入控制FBs-PLC除7个无输入控制的应用指令外,其它应用指令至少有一个输入控制,最多为四个。
应用指令是按照输入控制信号的组合来决定该指令是否执行,以及执行何种运算。
在PRO-LADDER软件包上及梯形图程序印出时,所有的应用指令符号的输入控制及功能输出端子上都有加注英文批注简写,以注明该端子是何种功能控制或输出,以利于记忆和阅读,如上图例2第一个输入标注〝CK↑〞,表示计数脉冲Clock由0→1(升缘)时,该计数器才计数一次,第二个输入标注〝U/D〞斜线上方U表上数Up,下方D表示下数Down,若此输入为1则当计数脉冲CK↑来时,该计数器值会加1,反之若为0则减1,第三个输入标示〝CLR〞,表示清除Clear,即当此输入为1时,该计数器的计数值会被清为0。
其它应用指令的输入控制批注请参考各指令说明。
注:无输入控制指令是指该指令需直接接于母线,不能串接输入控制组件,也无功能输出。
该指令本身单独形成一个网络。
有MCE、SKPE、LBL、RTS、RTI、FOR、NEXT等7个无输入控制指令,请参考第6及7章各该指令的说明。
所有应用指令的各〝输入控制〞均应有组件连接,否则会出现语法错误。
如下图例3,FUN7为三输入的应用指令,在FUN7指令前面的三个组件(ORG X0, LD X1, LD X2)分别对应到FUN7的第一个输入CK↑,第二个输入U/D和第三个输入CLR。
例3:5.1.2指令号码与衍生指令FP-08除前述9个指令以专用按键输入外,其它的应用指令都需以〝指令号码〞来输入,在〝指令号码〞后,还可以加上D、P或DP等后缀,而衍生出另外三种不同的指令,现叙述如下:D:表示Double Word,双字符组(32位)之意。
12第五章讲义PLC

• 支流线上的常开、常闭触点称为节点,与传统 的继电器电路中常开、常闭触点含义相同,闭合时 为1,即导通状态,常开时为0,即断开状态。 • 支流线的末端通常接线圈或功能块,类似传统 的继电器电路中的线圈,
基本逻辑指令
LD: 将常开节点与逻辑母 线相连。常开节点在不带电 时,节点是断开的(OFF, 或0),而带电时,节点是 闭合的(ON,或1)。 LDN: 将常闭节点与逻辑母 线相连。常闭节点在不带电 时,节点是闭合的,而带电 时,节点是断开的。 =: 用于驱动(输出到)输 出继电器、辅助继电器、定 时器或计数器等。
执行S与R指令时, 从指定的位地址开始 的N个点的映像寄存 器都被置位(变为1) 或复位(变为0), N=1~255
问题:
当I0.0 、 I0.1同时按下 时,效果是什 么?
EU:当EU指令前的结果 是上升沿(由0到1的跳 变),产生宽度位一个扫 描周期的脉冲,驱动其后 的线圈。 ED:当EU指令前的结果 是上升沿(由0到1的跳 变),产生宽度位一个扫 描周期的脉冲,驱动其后 的线圈。 NOT:将左边电路的逻辑 运算结果取反后,输出到 其后的线圈
3. 断开延时定时器
TOF 断开延时定时器指令,用于断开 后单一间隔定时。 输入接通时,定时器位为ON,当 前值为0。 输入由接通到断开时,定时器开 始计数,当前值达到预设值时, 定时器位 OFF ,当前值等于预设 值,停止计数。 TOF 复位后,如果使能输入再有 从 ON 到 OFF 的负跳变,则可实现 再次启动。 指令格式:TOF Txxx,PT 例: TOF T35,6
~
220V
I0.0 I0.1 I0.2
Q0.1 Q0.2 Q0.3 M L N
I0.3
M L
第5章-罗克韦尔PLC冗余控制系统-

3.冗余ቤተ መጻሕፍቲ ባይዱ制系统的无扰切换
1 冗余控制系统的切换时间 罗克韦尔PLC冗余控制系统的切换时间取决于ControlNet网络的刷新时间( NUT)。 2 冗余控制系统切换的数据完整性
4.冗余控制系统中ControlNet节点地址设置
在冗余机架中,CNB模块与对等方CNB模块共用一对ControlNet节点号, 如图5-9所示。
1.冗余控制系统的组成
1 冗余框架 2 控制器
3 CBN模块 4 ENBT模块 5 CNB和ENBT模块 6 SRM模块 • 2.冗余控制系统的网络刷新时间
(2)电源冗余 在使用冗余电源的PLC冗余控制系统中,需要使用两个冗余电源,1756PA75R和1756-PB75R可以任意组合。报警器接线可以连接电源模块和输入模块 ,如图5-7所示。
(3)系统框架冗余 在使用冗余系统框架的PLC控制系统中,冗余框架的尺寸大小必须相同,框架 的槽设置必须相同,如图5-8所示。
1. PLC冗余控制系统概述 2. 罗克韦尔PLC冗余控制系统架构 3. 罗克韦尔PLC冗余控制系统设计
如图5-1所示为冗余系统示意图。
1.冗余控制系统和热备用系统
所谓“冗余”系统,是指整个PLC控制系统由两套完全相同的系统组成,其 中一套在系统正常工作时并不需要,如图5-2所示。
在热备用(Hot)系统中,两台CPU用通信接口连接在一起,均处于通电状 态,如图5-3所示。
软件冗余系统中PLC内部的运行过程如图5-4所示。
电气控制与PLC技术 第五章 TIA博途软件及使用

电气控制与PLC技术(S7-1200)
5.1 TIA 博途软件概述 5.1.2 TIA博途软件构成
电气控制与PLC技术(S7-1200)
5.2 TIA博途软件的界面 5.2.1 Portal视图
Portal视图是面向任务的视图。
① 任务选项 ② 所选任务选项对应的操作 ③ 操作选择面板 ④ 切换到项目视图 ⑤ 当前打开的项目的显示区域
电气控制与PLC技术(S7-1200)
5.2 TIA博途软件的界面 5.2.2 项目视图
项目视图是项目所有组件的结 构化视图,可以访问项目各组 件以及相关工作区和编辑器。
① 标题栏 ② 菜单栏 ③ 工具栏 ④ 项目树
电气控制与PLC技术(S7-1200)
5.2 TIA博途软件的界面 5.2.2 项目视图
项目树有项目、设备、文件夹和对象4个 层次。
电气控制与PLC技术(S7-1200)
5.2 TIA博途软件的界面 5.2.3 项目树
(1)标题栏:有自动和手动折叠项目树按钮。 (2)工具栏:用“创建新组”按钮,创建新的用户文件夹 ;用“最大/最小概览视图”按钮,在工作区中显示所选对 象的总览。 (3)项目:可以找到与项目相关的所有对象和操作。 (4)设备:项目中的每个设备都有一个单独的文件夹。
电气控制与PLC技术(S7-1200)
5.2 TIA博途软件的界面 5.2.3 项目树
(5)公共数据:包含可跨多个设备使用的数据。 (6)文档设置:可指定要在以后打印的项目文档的布局。 (7)语言和资源:确定项目语言和文本。 (8)在线访问:包含了PG/PC的所有接口,查找可访问的 设备。 (9)读卡器/USB存储器:用于管理连接到PG/PC的所有读 卡器和其他USB存储介质。
plc第五章
8. 定时器(T)
• 定时器(T)是累计时间增量的内部元件。 • S7-200 PLC定时器有三种类型:接通延时定时器
TON,断开延时定时器TOF,保持型接通延时定时 器TONR。 • 定时器的定时时基有三种:1ms、10ms、100ms 。使用时需要提前设置时间设定值。 • 与定时器相关的有两个变量:定时器当前值和定 时器状态位 。 • 定时器地址表示格式为:T[定时器号],如T24 、T37、T38等 。
‘ASCII文本’
‘file’
按照ANSI/IEEE 754—1985 125.2或1.252×1 标准(单精度)格式
5.2.2 数据类型及范围
基本数据类型
数据的位数
布尔型(BOOL)
1
无符号数
字节型B(BYTE)
8
字型W(WORD)
16
双字型D(DWOR
32
D)
有符号数
字节型B(BYTE)
8
整型(INT)
• 其地址格式为: • 位地址:L[字节地址].[位地址],如L0.0、
L50.4。 • 字节、字、双字:L[数据长度][起始字节地址
],如LB33、LW44、LD55。 • CPU226模块局部存储器的有效地址范围为:L(
0.0~63.7);LB(0~63);LW(0~62);LD (0~60)。
如VB20、VW100、VD320。 • CPU226模块变量存储器的有效地址范围为:V(0.0~
5119.7);VB(0~5119);VW(0~5118);VD(0~ 5116)。
5. 局部变量存储器(L)
• 局部变量存储器(L)用来存放局部变量。局部变量存储器 局部有效。常用于带参数的子程序调用过程中。
第五章PLC的步进电机控制系统ppt课件
5.2步进电机在工业控制领域的主要应用情况介绍
步进电机作为执行元件,是机电一体化的关键产 品之一, 广泛应用在各种家电产品中,例如打印 机、磁盘驱动器、玩具、雨刷、震动寻呼机、机 械手臂和录像机等。另外步进电机也广泛应用于 各种工业自动化系统中。由于通过控制脉冲个数 可以很方便的控制步进电机转过的角位移,且步 进电机的误差不积累,可以达到准确定位的目的。 还可以通过控制频率很方便的改变步进电机的转 速和加速度,达到任意调速的目的,因此步进电 机可以广泛的应用于各种开环控制系统中
5.3西门子PLC对步进电机的控制方法
PLC直接控制步进电机 西门子PLC与步进电机驱动器控制步进电
机 高频脉冲输出控制举例
PLC直接控制步进电机
使用PLC直接控制步进电机时,可使用 PLC产生控制步进电机所需要的各种时序 的脉冲。例如三相步进电机可采用三种工 作方式:
三相单三拍 三相双三拍 三相单六拍
电机的位置和速度由绕组通电次数(脉冲 数)和频率成一一对应关系。而方向由绕 组通电的顺序决定。
步进电机的基本结构和工作原理
步进电机的基本参数主要有以下内容 1.电机固有步距角 2.步进电机的相数 3.保持转矩(HOLDING TORQUE) 4.钳制转矩(DETENT TORQUE)
1.电机固有步距角
3.保持转矩(HOLDING TORQUE)
保持转矩是指步进电机通电但没有转动时, 定子锁住转子的力矩。它是步进电机最重 要的参数之一,通常步进电机在低速时的 力矩接近保持转矩。由于步进电机的输出 力矩随速度的增大而不断衰减,输出功率 也随速度的增大而变化,所以保持转矩就 成为了衡量步进电机最重要的参数之一。 比如,当人们说2N.m的步进电机,在没 有特殊说明的情况下是指保持转矩为 2N.m的步进电机。
《西门子PLC高级项目应用》第5章 机器人码垛的自动控制

ABB机器人系统信号设置
ABB机器人程序数据建立
取料盘6个物块的位置数据,存放在数组pq中;放料盘6个即将放置物块的位 置数据,存放在数组pf中。取放工具的位置数据存放在pTool中。
ABB机器人程序
抓取夹具程序GetTool
ABB机器人程序
从取料盘依次取物块放置放料盘中,使用For循环指令完成该操作
ABB机器人程序
放置夹具程序PutTool
ABB机器人程序
主程序
IO分配
输入信号
序号 PLC输入点
信号名称
1
I0.0 (上电按钮)绿色自保持
ห้องสมุดไป่ตู้
按钮
2
I0.1 (运行按钮)绿色自复位
按钮
3
I0.2 (暂停按钮)红色自复位
按钮
输出信号
序号 1 2 3 4
PLC输出点
信号名称
Q0.0 Q0.1 Q0.2 Q0.3
绿色自保持按钮指示灯
Q0.1
绿色自复位按钮指示灯
Q0.2
红色自复位按钮指示灯
Q100.0 Q100.1 Q100.2
电机上电 机器人运行 机器人停止
PLC编程
机器人通信配置
“控制面板>配置”,进入下图所示界面,该界面的主题为“I/O”,需切换至 “Communication”主题。
机器人通信配置
机器人通信配置
更改机器人站点名称,点击“Industrial Network”
机器人通信配置
将PROFINET Station Name设置为ABBRob,如下图所示,与PLC的组态模块名称 一致。
机器人通信配置
添加三个数字量输入信号,分别为RobMotorOn_P、RobStart_P和RobStop_P, 都绑定到名称为“PN_Internal_Device”的PROFINET Internal Device设备。添加完 成后重新启动机器人系统。
plc第五章交通灯控制系统(电子书)

第5章交通灯控制系统本章以制作交通灯控制系统为目的,首先从最简单的定时电铃入手,逐步掌握按钮人行横道设计方法,最终完成十字路口交通灯控制系统设计,使学生逐步掌握PLC循环指令,数据转换指令和实时时钟指令,提高读者应用PLC按要求完成设计任务的能力。
教学导航教知识重点(1)PLC编程设计中时间设定的方法。
(2)PLC循环指令,数据转换指令和实时时钟指令。
(3)交通灯控制系统中触摸屏的设计方案和参数设置。
知识难点PLC循环指令,数据转换指令和实时时钟指令。
推荐教学方法本章的知识链接部分用讲授法和引导文法;初步训练部分使用案例教学法;强化训练、拓展训练部分使用项目教学法。
学推荐学习方法循序渐进的完成定时电铃、按钮人行横道和十字路口交通灯设计,在完成任务过程中逐步掌握S7-200新的编程指令和编程方法。
必须掌握的理论知识PLC循环指令,数据转换指令和实时时钟指令。
必须掌握的技能(1)PLC编程设计中时间设定的方法。
(2)触摸屏的设计方案和参数设置方法。
5.1 交通灯控制系统介绍随着社会经济的发展,城市交通问题越来越引起人们的关注。
人、车、路三者关系的协调,已成为交通管理部门需要解决的重要问题之一。
城市交通控制系统主要用于城市交通数据监测、交通信号灯控制与交通疏导的计算机综合管理系统,它是现代城市交通监控指挥系统中最重要的组成部分。
交通信号灯控制模型是一个较为典型的实训模型。
实际的交通信号灯控制基本方法是:根据事先测定好的路口的车流量,将两个方向红绿灯的延时时间预先设定好,指挥车辆根据红绿灯的延时时间通行和停止。
而在交通信号灯模型中,直接给出两个方向灯的延时时间,主要考查的是读者对交通信号灯时序的理解和通过编程解决问题的能力。
在实际应用中,交通灯控制系统的类型多种多样,常见的有按钮人行道控制系统、十字路口交通灯控制系统、具有通行时间显示的十字路口交通灯控制系统等。
图5-1 交通灯控制系统5.2 知识链接5.2.1 循环指令在控制系统中经常遇到需要重复执行若干次同样的任务情况,这时可以使用循环指令。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
图5-16 机械手示意图
图5-17 操作面板
图5-18 外部接线图
5.4.2 使用起保停电路的编程方法
图5-19 OB1程序结构
图5-20 公用程序
图5-21 手动程序
图5-25 自动返回原点的顺序功能图与梯形图
图5-10 顺序功能图
5.3 使用SCR指令的顺序控制梯形图设计方法
图5-12 顺序功能图与梯形图
图5-13 顺序功能图与梯形图
图5-15 剪板机控制的顺序功能图
图5-15 剪板机控制的梯形图
5.4 具有多种工作方式的系统的顺序控制梯形图设计方法 5.4.1 系统的硬件结构与工作方式
第5章 顺序控制梯形图的设计方法
5.1 使用起保停电路的顺序控制梯形图设计方法
图5-2 顺序功能图和梯形图
图5-3 选择序列与并行序列
图5-4 人行横道交通灯波形图与顺序功能图
图5-6 仅有两步的闭环的处理
5.2
以转换为中心的顺序控制梯形图设计方法
图5-7 运输带控制系统顺序功能图与梯形图