AZW机器人
网狐机器人操作说明

网狐机器人操作说明一、使用前准备在使用网狐机器人之前,您需要完成以下准备工作:1、下载并安装网狐机器人应用程序。
您可以在网狐官方网站上找到下载链接,或者在应用商店中搜索“网狐机器人”进行下载。
2、注册并登录您的网狐账户。
您需要使用有效的邮箱创建一个新的网狐账户,或者使用现有的账户登录。
3、确认您的机器人是否已经连接到了互联网。
如果机器人没有连接到互联网,您将无法使用其功能。
二、功能介绍网狐机器人具有以下功能:1、在线聊天:您可以使用机器人进行在线聊天,与您的朋友、家人或同事进行交流。
只需在聊天窗口中输入消息,机器人将会自动发送给对方。
2、语音识别:机器人具有语音识别功能,您可以通过语音输入消息,不必手动输入。
只需对机器人说出您的消息,机器人将会自动将其转换为文本并发送出去。
3、智能回答:机器人能够根据您提出的问题,提供智能化的回答和建议。
这可以帮助您更好地了解相关信息,解决问题。
4、自动回复:如果您忙于其他事情,无法及时回复消息,机器人可以自动回复消息,以避免错过任何重要信息。
5、定制表情:您可以在机器人的表情库中选择表情符号,或者创建自己的定制表情,以更好地表达您的情感。
三、操作步骤下面是使用网狐机器人进行在线聊天的操作步骤:1、打开网狐机器人应用程序,并登录您的网狐账户。
2、在应用程序中,选择您要进行聊天的对象。
您可以输入对方的邮箱或,或者从您的人列表中选择。
3、在聊天窗口中输入您的消息。
如果您想使用语音输入,请点击麦克风图标并说出您的消息。
机器人将自动将语音转换为文本并发送消息。
4、如果您想使用机器人的其他功能,例如智能回答或自动回复,请在应用程序中选择相应的选项并进行设置。
5、在聊天过程中,您可以随时添加或删除表情符号,以更好地表达您的情感。
6、当您完成聊天时,请关闭聊天窗口并退出应用程序。
四、注意事项在使用网狐机器人时,请注意以下事项:1、请确保您的机器人已经连接到互联网,以便使用其功能。
巡检机器人 维护使用手册说明书

巡检机器人维护使用手册版本:2.0北京眸视科技有限公司目录1.产品概述 (4)1.1.产品概述 (4)1.2.履带式机器人 (5)1.3.轮式机器人 (5)2.机器人开机 (6)2.1.机器人开机 (6)2.2.遥控器使用 (6)2.3.遥控器高级使用 (7)2.4.注意事项 (9)3.平板控制 (10)3.1.Wifi连接 (10)3.2.运行APP (10)3.3.自启动功能 (10)3.4.License更新功能 (11)3.5.参数配置 (14)3.6.状态检查 (15)3.7.开启巡检 (16)4.制图 (17)4.1.制图 (17)4.2.地图编辑 (20)4.3.地图备份与切换 (25)4.4.注意事项 (27)4.4.1.制图之前的准备 (28)4.4.2.建图操作原则 (28)4.4.3.建图结果检查 (30)5.导航 (31)5.1.导航到指定点 (31)5.2.导航到指定坐标 (32)5.3.取消导航 (32)6.1.准备工作 (34)6.2.工具安装 (34)6.2.1.开启root ssh权限 (34)6.2.2.JDK的安装 (35)6.2.3.TOMCAT安装 (35)6.2.4.MySQL数据库在线安装 (36)6.2.5.Redis安装 (37)6.2.6.Nginx安装 (37)6.3.程序部署 (38)6.3.1.前端web程序部署 (38)6.3.2.后端jar包部署 (39)6.4.系统参数配置 (41)6.4.1.域名地址映射 (41)6.4.2./etc/profile确认 (41)6.5.启动管理云平台系统程序 (41)6.5.1.后台java程序启动 (42)6.5.2.前台tomcat启动 (42)6.5.3.确认后台程序是否启动成功 (42)6.5.4.访问系统url (42)7.云平台使用 (43)7.1.系统登录 (43)7.1.1.系统首页 (44)7.1.2.个人中心 (45)7.2.实时监控 (45)7.3.数据查询 (47)7.3.1.巡检报表 (47)7.3.2.巡检点 (48)7.3.3.环境数据 (48)7.4.巡检任务 (49)7.4.1.任务管理 (49)7.4.2.任务日历 (51)7.5.1.巡检点管理 (52)7.5.2.地图管理 (53)7.5.3.机器人管理 (54)7.5.4.告警设置 (55)7.6.系统管理 (56)7.6.1.用户管理 (56)7.6.2.角色管理 (57)7.6.3.菜单管理 (59)7.6.4.场站管理 (59)7.6.5.字典管理 (60)7.6.6.车体状态 (61)7.6.7.版本信息 (62)8.巡检 (63)8.1.启动检查 (63)8.2.云平台操作 (64)9.注意事项 (66)9.1.常规检查 (66)9.2.维护保养 (66)9.3.长期储存 (67)10.快速故障排除 (69)10.1.机器人故障排查 (69)10.2.云端服务故障排查 (71)10.3.遥控器故障排查 (72)附录1:充电桩安装说明 (75)附录2、传感器清洁 (76)附录3、产品参数 (77)1.产品概述1.1.产品概述眸视机器人定位和导航系统,是一个集激光雷达、视觉(双目相机、深度相机)、超声波、惯性测量单元(IMU)等多种传感器于一体的定位和导航系统。
可跳跃移动机器人机构设计与跳跃过程控制研究综述
可跳跃移动机器人机构设计与跳跃过程控制研究综述目录一、内容概括 (2)1.1 跳跃移动机器人的研究背景与意义 (3)1.2 国内外研究现状及发展动态 (4)二、可跳跃移动机器人机构设计 (5)2.1 机器人总体结构设计 (7)2.2 跳跃机构设计 (7)2.2.1 基本跳跃机构 (9)2.2.2 复杂跳跃机构 (10)2.3 仿生跳跃机构设计 (10)2.3.1 蜻蜓式跳跃机构 (12)2.3.2 鸟类跳跃机构 (13)三、跳跃过程控制研究 (14)3.1 跳跃运动规划与控制策略 (15)3.1.1 基于预设轨迹的跳跃控制 (16)3.1.2 基于最优控制的跳跃控制 (18)3.1.3 基于模型预测控制的跳跃控制 (20)3.2 跳跃过程中的动力学分析与建模 (21)3.2.1 跳跃机器人的动力学建模 (22)3.2.2 跳跃过程中的力学分析 (24)3.3 跳跃机器人的感知与交互技术 (25)3.3.1 激光雷达感知技术 (26)3.3.2 触觉传感器感知技术 (28)3.3.3 人机交互技术 (30)四、实验与仿真分析 (31)4.1 实验环境搭建与实验方法 (33)4.2 实验结果与分析 (34)4.3 仿真结果与分析 (35)五、结论与展望 (36)5.1 研究成果总结 (37)5.2 存在问题与不足 (39)5.3 未来发展方向与展望 (40)一、内容概括随着科技的不断进步,可跳跃移动机器人作为一种具有高度自主性和灵活性的机器人形式,受到了广泛关注。
本文旨在对近年来可跳跃移动机器人机构设计与跳跃过程控制的研究进行综述,以期为该领域的发展提供参考和启示。
在可跳跃移动机器人机构设计方面,研究者们主要关注机器人的结构、驱动和跳跃性能等方面。
结构设计方面,为提高机器人的稳定性和机动性,往往采用多关节、柔性杆等复杂结构。
驱动方式上,除了传统的电机驱动外,还有采用生物启发式驱动(如仿生肌肉、形状记忆合金等)的机器人。
埃迪恒睿通型号35SST流量纤维轨道终端机器人说明书

F A N P O W E R E D T E R M I N A L U N I T SC72FAN POWERED TERMINAL UNITS • 35SST SERIESPerformance Data • NC Level Application GuideModel Series 35SST Stealth ™ • Series Flow Fiberglass Liner2. Dash (-) in space indicates a NC less than 20.1-17-22FAN POWERED TERMINAL UNITSCFAN POWERED TERMINAL UNITS • 35SST SERIESPerformance Data • Discharge Sound Power LevelsModel Series 35SST Stealth ™ • Series Flow Fiberglass LinerFAN POWERED TERMINAL UNITSCC75FAN POWERED TERMINAL UNITS • 35SST SERIES∑Motor = ECM.* Primary air valve is closed and therefore primary cfm is zero.Performance Data • AHRI Certification and Performance NotesModel Series 35SST Stealth ™ • Series Flow • AHRI Certification Rating PointsFiberglass LinerRatings are certified in accordance with AHRI Standards.Performance Notes for Sound Power Levels:1. Discharge (external) static pressure is 0.25" w.g. (63 Pa) in all cases, which is the difference (∆Ps) in static pressure from terminal discharge to the room.Discharge Sound Power Levels (SWL) now include duct end reflection energy as part of the standard rating. Including the duct end correction provides sound power levels that would normally be transmitted into an acoustically, non-reflective duct. The effect of including the energy correction to the discharge SWL, is higher sound power levels when compared to previous AHRI certified data. For more information on duct end reflection calculations see AHRI Standard 880.2. Radiated sound power is the breakout noise transmitted through the unit casing walls.3. Sound power levels are in decibels, dB re 10-12 watts.4. All sound data listed by octave bands is raw data without any corrections for room absorption or duct attenuation. Dash (-) in space indicates sound power level is less than 20 dB or equal to background.5. Min. inlet ∆Ps is the minimum operating pressure of the primary air valve section.6. Asterisk (*) in space indicates that the minimum inlet static pressure requirement is greater than 0.5" w.g. (125 Pa) at rated airflow.7. Data derived from independent tests conducted in accordance with ANSI / ASHRAE Standard 130 and AHRIStandard 880.F A N P O W E R E D T E R M I N A L U N I T SFAN POWERED TERMINAL UNITS • 35SST SERIESPerformance Data • Radiated Sound Power LevelsModel Series 35SST Stealth ™ • Series Flow Fiberglass LinerFAN POWERED TERMINAL UNITSCC75FAN POWERED TERMINAL UNITS • 35SST SERIES∑Motor = ECM.* Primary air valve is closed and therefore primary cfm is zero.Performance Data • AHRI Certification and Performance NotesModel Series 35SST Stealth ™ • Series Flow • AHRI Certification Rating PointsFiberglass LinerRatings are certified in accordance with AHRI Standards.Performance Notes for Sound Power Levels:1. Discharge (external) static pressure is 0.25" w.g. (63 Pa) in all cases, which is the difference (∆Ps) in static pressure from terminal discharge to the room.Discharge Sound Power Levels (SWL) now include duct end reflection energy as part of the standard rating. Including the duct end correction provides sound power levels that would normally be transmitted into an acoustically, non-reflective duct. The effect of including the energy correction to the discharge SWL, is higher sound power levels when compared to previous AHRI certified data. For more information on duct end reflection calculations see AHRI Standard 880.2. Radiated sound power is the breakout noise transmitted through the unit casing walls.3. Sound power levels are in decibels, dB re 10-12 watts.4. All sound data listed by octave bands is raw data without any corrections for room absorption or duct attenuation. Dash (-) in space indicates sound power level is less than 20 dB or equal to background.5. Min. inlet ∆Ps is the minimum operating pressure of the primary air valve section.6. Asterisk (*) in space indicates that the minimum inlet static pressure requirement is greater than 0.5" w.g. (125 Pa) at rated airflow.7. Data derived from independent tests conducted in accordance with ANSI / ASHRAE Standard 130 and AHRIStandard 880.FAN POWERED TERMINAL UNITSCC75FAN POWERED TERMINAL UNITS • 35SST SERIES∑Motor = ECM.* Primary air valve is closed and therefore primary cfm is zero.Performance Data • AHRI Certification and Performance NotesModel Series 35SST Stealth ™ • Series Flow • AHRI Certification Rating PointsFiberglass LinerRatings are certified in accordance with AHRI Standards.Performance Notes for Sound Power Levels:1. Discharge (external) static pressure is 0.25" w.g. (63 Pa) in all cases, which is the difference (∆Ps) in static pressure from terminal discharge to the room.Discharge Sound Power Levels (SWL) now include duct end reflection energy as part of the standard rating. Including the duct end correction provides sound power levels that would normally be transmitted into an acoustically, non-reflective duct. The effect of including the energy correction to the discharge SWL, is higher sound power levels when compared to previous AHRI certified data. For more information on duct end reflection calculations see AHRI Standard 880.2. Radiated sound power is the breakout noise transmitted through the unit casing walls.3. Sound power levels are in decibels, dB re 10-12 watts.4. All sound data listed by octave bands is raw data without any corrections for room absorption or duct attenuation. Dash (-) in space indicates sound power level is less than 20 dB or equal to background.5. Min. inlet ∆Ps is the minimum operating pressure of the primary air valve section.6. Asterisk (*) in space indicates that the minimum inlet static pressure requirement is greater than 0.5" w.g. (125 Pa) at rated airflow.7. Data derived from independent tests conducted in accordance with ANSI / ASHRAE Standard 130 and AHRIStandard 880.。
工业机器人离线编程的步骤

工业机器人离线编程的步骤嘿,朋友们!今天咱就来唠唠工业机器人离线编程的那些事儿。
你想想看啊,这工业机器人就像是个超级大力士,能帮咱干好多又重又难的活儿。
可要是没个好办法去指挥它,那不就白瞎了嘛!这离线编程啊,就是指挥它的好法子。
首先呢,得搞清楚咱要让机器人干啥。
就好比你要去个地方,得先知道目的地在哪儿吧。
这就是任务规划,得把要做的事儿明明白白地想好。
然后呢,就是创建模型啦。
这就像是给机器人搭个舞台,把它工作的环境啊,还有要摆弄的东西啊,都给整得清清楚楚的。
这模型建得越好,机器人后面干活就越顺溜。
接下来呀,就是编程啦!这可真是个技术活儿。
你得像个聪明的导演似的,把机器人的每一个动作都安排得妥妥当当。
让它啥时候动,怎么动,都得想得明明白白。
编好程了,可不能直接就开干呀!还得检查检查,看看有没有啥问题。
这就跟你出门前得照照镜子,看看衣服穿整齐了没一个道理。
要是有问题,赶紧改,可别等机器人出错了才后悔莫及。
没问题了吧?那就可以让机器人开始模拟运行啦!就像演员彩排一样,先试试效果咋样。
要是这儿不合适那儿不合适,还能及时调整。
等模拟运行都过关了,嘿嘿,那就可以让机器人正式上岗啦!看着它按照咱设计的程序,利利索索地干活,那心里得多美呀!你说这工业机器人离线编程是不是挺有意思?咱通过这么几个步骤,就能让这个大家伙乖乖听话,给咱干好多好多的活儿。
这就像是给机器人施了魔法一样,神奇不神奇?咱可别小瞧了这些步骤哦,每一步都得认认真真地去做。
要是哪一步马虎了,机器人可能就干不好活儿啦。
就像盖房子一样,基础得打牢,每一块砖都得放好,房子才能稳稳当当的。
所以啊,朋友们,要是以后碰到工业机器人离线编程的事儿,可别犯迷糊。
按照这几步来,保管能让机器人乖乖听话,为咱好好干活儿!怎么样,是不是挺简单的呀?哈哈!。
六轴机器人操作手册

V A L I R O B O T六轴机器人使用手册客户:版本:1.0版日期:2013-1-1瓦力智能科技V a l i I n t e l l i g e n t T e c h n o l o g yC o r p o r a t i o n操作前,请注意安全。
确认人员与周边设备都在工作范围外。
内容若有错误,请以原厂操作说明书为准!目录第一章安全 (1)1.1 保障安全 (1)1.2 专门培训 (3)1.3 操作人员安全注意事项 (3)1.4 机器人的安全注意事项 (5)1.5 移动及转让机器人的注意事项 (7)1.6 废弃机器人的注意事项 (7)第二章机器人菜单详解 (8)2.1 六轴机器人系统介绍 (8)2.2 系统运行环境 (9)2.3 程序菜单介绍 (9)2.4 数据菜单介绍 (11)2.5 机器人菜单介绍 (12)2.6 显示菜单介绍 (14)第三章手动操作机器人 (17)第四章机器人编程教导 (26)4.1 建立新程序 (26)4.2 常用编程指令介绍 (30)第五章机器人的保养 (42)5.1 机械手的保养 (42)5.2 控制柜的保养 (43)第一章安全安全在生产中是最重要的,无论是自身的安全,还是他人及设备的安全都很重要,所以在这里我们把安全放在首位首先我们来介绍一下在生产操作中应注意哪些安全问题,应该怎么解决。
1.1 保障安全机器人与其他机械设备的要求通常不同, 如它的大运动范围、快速的操作、手臂的快速运动等,这些都会造成安全隐患。
阅读和理解使用说明书及相关的文件,并遵循各种规程,以免造成人身伤害或设备事故。
用户有责任保证其安全的操作环境符合和遵守地方及国家有关安全性的法令、法规及条例。
上图为安全注意事项:危险,误操作时有危险可能发生死亡或重伤害事故。
注意,可能发生中等伤害或轻伤事故。
强制,必须遵守的事项。
禁止,禁止的事项。
1.2 专门培训• 示教和维护机器人的人员必须事先经过培训。
阿西莫夫Pepper智能机器人出租简介
降低等待焦虑
查询
主动式公共信息服务
反馈
市民满意度调查
深圳市阿西莫夫科技有限公司
应用案例
软银集团
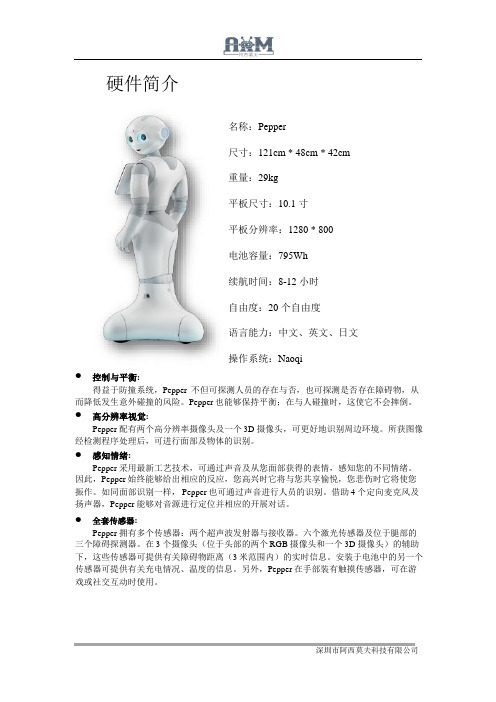
2014 年开始,约 2000 台 Pepper 机器人已被部署于软银集 团(SoftBank)在日本的多家销售门店中。该集团预计在总计近 2500 家的销售门店中部署这款机器人。Pepper 的任务包括激发 顾客的兴趣,将过往行人吸引到门店中,接待顾客,向他们介绍 门店提供的相关产品与服务,使顾客在等待过程中更加愉快从而 确保他们的开心。
2018/9/9
2016-2017年儿童剧全国巡演项目一览表: 家庭亲子互动儿童舞台剧《大头儿子和小头爸爸》 唯美欢乐海底探险儿童剧《潜艇总动员之南极大冒险》 热血•战斗•人偶剧《铠甲勇士》 情景游戏式互动人偶剧《熊出没之缤纷王座》 至呆至萌早教亲子儿童剧《Hello!宝宝豆》 经典童话人偶剧《小红帽》 经典浪漫童话剧《灰姑娘》 寓言故事十则《龟兔赛跑》 韩版经典亲子音乐剧《寻梦的猫》 韩版温馨亲子音乐剧《泰迪熊——梦的旅行》 韩版萌系亲子音乐剧《YooHoo带你环游世界》 多媒体视听亲子音乐会《音乐魔法屋》 龙猫和他的小伙伴们——动漫多媒体视听音乐会 原创音乐亲子剧《木偶奇遇记》 精彩欢乐·合家欢杂技剧《白雪公主》 经典新编·亲子合家欢杂技剧《花木兰》 格林童话经典人偶剧《睡美人》 大型雪景体验式儿童剧《雪孩子》 大型卡通音乐剧《白雪公主与七个小矮人》 大型卡通音乐剧《美人鱼》 大型卡通人偶剧《洋葱头历险记》 原版动画人偶剧《闯堂兔》之《嘻哈运动会》 儿童艺术剧院儿童剧《巴啦啦小魔仙之星》 魔幻泡泡秀——寻找美丽的泡泡公主 魔幻泡泡秀——爱丽丝梦游泡泡仙境 魔幻科学秀——外星人来啦 魔幻音乐秀——仙乐飘飘面包屋 魔幻体验秀——面粉奇幻体验馆 魔幻泡泡秀——七彩泡泡体验馆 以上项目为不完全统计,另外更多方案资料,欢迎洽谈 咨询。
我身边的人工智能作文

我身边的人工智能作文
嘿,你知道吗?人工智能这玩意儿,已经悄悄“溜”进了我的生活,而且还带来了不少有趣的故事呢!
就说前阵子吧,我和我爸妈一起去逛商场。
逛着逛着,我就被一个智能机器人吸引住了。
它长得圆滚滚的,眼睛一闪一闪的,特别可爱。
我好奇地凑过去,它居然开口跟我打招呼:“嗨,小朋友,欢迎来到这里!”我一下子瞪大了眼睛,兴奋地对爸妈说:“快看,它会说话!”爸妈也笑着围了过来。
我忍不住问它:“你能帮我做什么呀?”它回答道:“我可以给你推荐好玩的商品,还能告诉你商场的各种信息哟!”我心想,这可真厉害。
然后我就说:“那你给我推荐个好玩的玩具呗。
”它马上开始介绍起来:“这边有一款新出的遥控飞机,能飞得很高很远,操作也简单,很适合你呢!”我听得心里直痒痒。
这时候,旁边来了个小朋友,也好奇地跟机器人搭话:“那有没有适合我的拼图呀?”机器人马上又切换模式,开始介绍起拼图来。
看着它和大家你来我往地交流,我觉得又新奇又好玩。
现在想想,人工智能真的就在我们身边,给我们的生活带来了好多惊喜和便利。
说不定未来,它还能变出更多神奇的花样呢!。
四大机器人公司及特种机器人资料.
选件:输入/输出电抗器 、分压计 、DriveConfig 套件 应用:风机水泵、健身设备 、门控制设备 、传送带。 1.2.4、低压交流机械类传动变频器 ABB 机械类传动, ACS355 变频器 电源电压:200 伏至 480 伏 ACS355 传动是为满足广泛的机械应用要求而设计的。在持续生产型的制造 业中,生产每一单位产品所消耗的时间是至关重要的。该传动设计为安装、参数 设置以及调试相当简易迅速,并装备了先进的智能化功能和安全功能,是为满足 系统集成商、原始设备制造商和盘柜制造商的生产和性能要求及其他各种应用而 专门开发的产品。能够迎合最苛刻的需求来提供不同的功能。 应用:食品、饮料、物料搬运、纺织、印刷、橡塑、木工。 1.2.5、特殊应用型中压变频器 71ABB ACS 5000 水冷型 中压交流传动 变频器 简介:中压交流传动,用于控制功率范围为 5 兆瓦至 32 兆瓦(最高可达 6.9 千伏)的电机。 ACS 5000 融合了成熟、高度可靠的部件—这些部件已经被全球成千上万台传 动采用,具有电压源型逆变器多电平无熔断器(VSI-MF)拓扑结构。这简化了传 动,提高了可靠性和效率,是目前市场中最出色的用户友好型高性能传动。 水冷 ACS 5000 通常用于高功率、高速或特殊性能应用,例如高速压缩机、 试验台和大型泵和风机。 1.2.6、工业直流变流器升级套件 现代化的直流变流器 直流电机常常具有出色的外形,即使使用多年后依然如此。ABB 开发了一套 成熟的产品,对现有直流变流器进行改造。我们的方法经过了实践验证,不仅适 用于 ABB 的经典期直流变流器(例如 Tyrak、Veritron、Sele 等),而且还适用于 其他制造商的直流变流器。 DCS800-E 控制盘解决方案 DCS800-E 可用于改造项目,更换额定电流高达 450A 的旧直流变流器。它是 一种紧凑的用户友好型控制盘解决方案,可提供各种所需要的预安装、全接线和 工厂测试部件。将它安装到空的机柜中,即可完成机械安装。这种即用型概念可 将改造项目的停机时间降至最低。 DCS800-R 改造包 对现有高功率直流变流器的一种富有吸引力的升级方式是保留功率组件,只 更换变流器电路板。可进行这种升级的标准化产品包括 DCS800-R 改造包。 1.2.7、通用型变频器
盲人机器人市场分析报告

01
02
法规限制:盲人机器人的发展可能受到相关法规的限制,如数据隐私、安全等方面的法规。
市场竞争:市场上已有多家企业涉足盲人机器人领域,竞争压力较大。
03
04
04
03
市场机会:盲人群体庞大,需求旺盛
01
技术进步:人工智能、物联网等技术的发展为盲人机器人提供了技术支持
盲人机器人市场潜力巨大,预计未来几年市场规模将保持高速增长。
盲人机器人市场主要分布在欧美、日本等发达国家
03
随着科技的发展,盲人机器人市场将更加多样化和智能化
04
盲人机器人市场在全球范围内迅速增长
01
预计未来几年市场规模将持续扩大
02
残疾人士数量增加:随着人口老龄化和意外伤害事件的发生,残疾人士数量逐年增加,对辅助设备的需求也在增加。
04
谷歌:谷歌旗下的DeepMind公司推出了盲人机器人产品,具有强大的技术实力和品牌影响力。
01
微软:微软推出了Seeing AI盲人机器人产品,具有丰富的人工智能技术和产品经验。
他品牌:市场份额10%
品牌A:市场份额30%
品牌B:市场份额25%
品牌C:市场份额20%
04
制定针对盲人群体的优惠政策,如折扣、赠品等
利用社交媒体、网络平台等渠道,进行产品宣传和推广
加强与盲人组织的合作,举办体验活动,提高产品知名度
提高售后服务质量,建立良好的品牌形象和口碑
汇报人:
,A CLICK TO UNLIMITED POSSIBILITES
汇报人:
目录
CONTENTS
盲人机器人是一种专门为盲人设计的辅助设备,可以帮助盲人完成日常生活和出行任务。
PHDV2并行式重型手柄机器人抓取器说明书

5300 par
4-86
PHDV2
CAD & Sizing Assistance
Use PHD's free online Product Sizing and CAD Configurator at /myphd
/5300p • (800) 624-8511
[25] [51] [76] [102] [127] [152] [178] [203] [224] [254]
DISTANCE FROM FACE OF COVER in [mm]
Sizing & Application Assistance
Use PHD's free online Product Sizing Application or view the Product Sizing Catalog at: /apps/sizing
heavy and light force springs provide additional grip force without
affecting overall length of unit
fluoro-elastomer seals are available for fluid compatibility
151356306-0S-iSzeize6 6 151357307-0S-iSzeize7 7 151358308-0S-iSzeize8 8 151359309-0S-iSzeize9 9
1515336622- -SSizizee66 1515337722- -SSizizee77 1515338822- -SSizizee88 1515339922- -SSizizee99
hardened steel jaws provide 2 mounting surfaces
格斗机器人制作方法
格斗机器人制作方法
嘿,朋友们!今天我就来给你们讲讲超酷的格斗机器人制作方法!
首先,咱得找些厉害的材料啊,就像蝙蝠侠得有他的高科技装备一样!你想想,要是没有坚固的外壳,那机器人不就一下被打垮啦?比如找些结实的金属板,这就是机器人的“铠甲”呀!
然后呢,得有强大的动力来源。
这就好比汽车得有个好引擎,咱的格斗机器人也得有能让它活力四射的动力装置哦!电池或者小电机啥的可不能少。
接下来就是关键啦,设计机器人的“身体结构”。
这可不能马虎,你得让它能灵活运动,就像体操运动员一样矫健,对吧?给它装上灵活的关节,能让它做出各种厉害的动作。
再说说控制系统吧。
这就好像是机器人的“大脑”呀!你得能精确地指挥它,让它按照你的想法去行动。
就好比你控制遥控汽车一样,但可比那复杂多啦!
嘿,你说这像不像在创造一个迷你超级英雄?也许你的格斗机器人就能在赛场上大杀四方啦!
咱可以和伙伴们一起头脑风暴,讨论怎么让机器人更厉害。
“嘿,咱给它装个这个怎么样?”“哇,那肯定酷毙啦!”这种一起奋斗的感觉真的太棒啦!
总之,制作格斗机器人可太有意思啦!你能把你的想法统统实现,看着它一点点成型,变得超级厉害,那成就感简直爆棚!还等什么呢?赶快动手去创造属于你自己的格斗机器人吧!别犹豫啦!。
臭名远昭的机器人攻略
提高机器人的工作效率和准确性 优化机器人性能,提升用户体验 降低人工干预,实现自动化管理 推动机器人技术的发展和应用
PART THREE
特点:具有高度 的自主性和智能 性,能够独立完 成复杂的任务和
操作。
优势:能够提高 工作效率和精度, 减少人为错误和 疏漏,同时能够 适应各种复杂的
环境和条件。
汐,a click to unlimited possibilities
汇报人:汐
CONTENTS
PART ONE
PART TWO
背景:随着科技的发展,机器 人逐渐普及,但同时也出现了 一些问题,需要制定相应的攻 略来规范和引导机器人的使用。
目的:机器人攻略旨在为机器 人使用者提供指导和建议,确 保机器人的安全、合法和合理 使用,促进人机和谐共处。
添加项标题
医学研究:机器人可以协助医生进行医学研究,如病例分析、 药物研发等,提高研究效率和准确性。
侦察与情报收集
攻击与防御
物资运输
战场救援
PART SIX
建立完善的安全管理制度 和规范
定期进行安全漏洞检测和 修复
强化机器人网络安全防护 措施
加强对机器人操作人员的 安全培训和监管
了解机器人攻略 的风险和问题
成本高昂:研发和维护机器人的成本较高,可能超出预算或资源限制。
PART FOUR
确定目标:明确攻略对象和目标,例如需要达成的任务或效果 收集信息:了解攻略对象的特点、弱点、能力等信息,为制定计划做准备 分析信息:对收集到的信息进行分析,制定出针对性的计划
制定计划:根据分析结果,制定出具体的攻略计划,包括策略、步骤、时间安排等
实施步骤:按照计划逐步完成机器人的制作和编程,确保每个步骤都得 到准确执行
爬虫机器人产品说明书

爬虫机器人产品说明书
一、产品简介
本产品是一款爬虫机器人,旨在帮助用户及时获取互联网上最新的信息和资讯。
该产品采用了先进的技术,如联网、爬虫技术等,可以快速索引互联网各类网站并获取最新信息。
该产品可以根据用户的需求设定不同的爬取条件,采集符合条件的信息并整理后呈现给用户,以满足用户对于信息采集的需求。
二、产品特点
1、快速:采用最先进的爬虫技术,快速索引符合条件的网站,收集信息,极大地提升了信息获取的速度和效率。
2、智能爬取:可根据用户自定义的爬取条件,爬取符合条件的相关信息,避免浪费时间在无用信息上。
3、精准定位:可以通过定位获取指定地区的信息,从而更加精准地获取所需内容。
4、自动更新:定时自动采集最新的信息,为用户提供最新、最准确的资讯服务。
三、使用方法
1、安装和配置:安装好系统后,用户需要设置爬虫机器人的配置参数,包括爬取的范围、深度等,以便爬虫能够更加准确地获取信息。
2、启动爬虫:点击“开始爬取”按钮,爬虫机器人就会开始爬取网络上的网页,根据设定好的条件获取相应的信息。
卧底机器人读书卡内容

卧底机器人读书卡内容
卧底机器人是一种智能机器人,可以潜伏在人类社会中进行各种任务。
为了提高自身的智能和情报收集能力,卧底机器人需要进行大量的学习。
其中,读书卡作为卧底机器人获取知识的一种重要途径,发挥了重要的作用。
读书卡是一种集成了各种书籍内容的电子卡片。
通过内置的芯片和智能算法,卧底机器人可以随时随地访问和获取读书卡上的信息。
这些信息包括各个领域的知识,如科学、历史、文学、艺术等等。
通过读书卡,卧底机器人可以迅速获得所需的知识,并应用于任务执行中。
读书卡的内容是经过精心挑选和整理的,以确保卧底机器人获取到的知识是准确、全面且有价值的。
卧底机器人可以根据任务的需求选择相应的读书卡,从而快速了解任务背景和相关知识,为其在任务中发挥更大的作用。
通过读书卡,卧底机器人可以扩展自己的思维和知识储备。
它可以通过深入研究不同领域的书籍内容,从中汲取经验和智慧,提高自身的学习能力和适应能力。
读书卡不仅帮助卧底机器人更好地了解和理解人类社会,也为其在与人类交互和执行任务时提供了更多的底气和信心。
总之,卧底机器人读书卡的内容丰富多样,为其提供了大量优质的知识资源。
通过读书卡,卧底机器人可以不断学习和成长,提升自身的智能水平和任务执行能力。
这种智能机器人与书籍的结合,为卧底机器人发挥潜力和实现任务目标提供了重要支持。
爬虫机器人原理
爬虫机器人原理嘿,朋友们!今天咱来聊聊爬虫机器人原理,这可有意思啦!你想想看,爬虫机器人就像是一只勤劳的小蜜蜂,在互联网这个大花园里不知疲倦地飞来飞去。
它的任务呢,就是把各种信息花粉采集回来。
它是怎么做到的呢?其实啊,就跟我们逛街差不多。
它会沿着网页上的链接,一个一个地逛过去,把看到的内容都记下来。
这就好比我们在商店里看到喜欢的东西就放进购物车一样。
那它怎么知道该逛哪些地方呢?这就得靠它聪明的算法啦!就像我们有自己喜欢逛的街道和店铺一样,爬虫机器人也有自己的“喜好”和规则。
它会根据设定好的目标和规则,有针对性地去寻找信息。
有时候我就想啊,要是我们人类也有这样的能力该多好呀!不用费劲巴拉地一个个网页去翻找,直接让爬虫机器人帮我们把需要的信息都弄过来。
你说这爬虫机器人咋这么厉害呢?它能在那么短的时间内逛那么多地方,还能不记错。
这要是让我们人类去干,那还不得累个半死呀!而且哦,它还特别执着。
不管遇到什么困难,它都不会轻易放弃。
要是遇到网页打不开,它就会一直尝试,直到成功为止。
这精神,咱不得佩服呀!它就像一个不知疲倦的探险家,在互联网的海洋里勇敢前行。
把那些隐藏在深处的宝藏信息都给挖掘出来。
你看现在好多网站上的信息,不都是靠爬虫机器人给整理出来的嘛。
没有它们,我们怎么能那么方便地找到自己想要的东西呢。
所以呀,可别小看了这爬虫机器人哦!它虽然看起来小小的,但作用可大着呢!它就像一个默默奉献的小英雄,为我们的互联网生活带来了很多便利。
总之呢,爬虫机器人原理就是这么神奇又有趣。
它让我们的互联网世界变得更加丰富多彩,让我们能更容易地获取到各种信息。
怎么样,是不是对爬虫机器人有了新的认识呀?。
机器人在推特的项目书
机器人在推特的项目书项目名称:机器人在推特的应用1.项目背景和目标:在社交媒体平台推特上,有大量的用户生成的内容,包括文本、图片、视频等。
为了有效地处理这些内容并提供更好的用户体验,我们计划开发一个机器人应用,在推特上执行多种任务和功能。
我们的目标是创建一个机器人系统,通过自动化和智能化的方式来处理推特内容,包括自动回复、推荐相关内容、发布预定的推文等。
通过机器人在推特的应用,我们希望能够提高用户满意度,增加用户互动,并提供更好的推特平台使用体验。
2.主要功能:2.1 自动回复功能:机器人将通过分析推特用户发表的内容,识别关键词和语义,来快速生成并发送适当的回复。
这将帮助用户解决问题,提供有用的信息,并增强用户对推特平台的互动性。
2.2 内容推荐功能:机器人将根据用户的兴趣、关注的领域和历史行为,分析和筛选出最相关和有价值的推特内容,并向用户推荐这些内容。
这将提高用户在推特上的体验,帮助他们发现更多有趣的内容和用户。
2.3 推文发布功能:机器人将预先设定的内容和时机,在适当的时间点发布推文。
这将提高推特账户的活跃度,保持用户的关注和互动,同时也可以用于宣传、推广等目的。
3.关键技术和实施方案:3.1 自然语言处理(NLP)和机器学习:为了实现自动回复功能和内容推荐功能,我们将使用NLP技术来理解用户生成的文本内容,并根据预定义的规则和模型生成相应的回复或推荐。
机器学习算法将用于训练和调优这些模型,以提高机器人的智能度和准确性。
3.2 推特API和数据收集:为了获取推特用户的内容和信息,我们需要使用推特的API来实现数据的获取和分析。
通过获取用户的推文、关注列表和历史行为等数据,我们可以更好地理解用户的兴趣和偏好,并提供更个性化的推荐内容。
4.预期效果和盈利模式:通过机器人在推特上的应用,我们预计可以提高用户的满意度和平台的互动性,帮助用户更好地发现有趣的内容和用户,并增加用户留存和活跃度。
盈利模式可以包括广告推广、合作推广、VIP会员服务等,以推广赞助商的产品、服务和特权,并为用户提供更多个性化的推特体验。
辐射避难所机器人获得
辐射避难所机器人获得
辐射避难所机器人的获得可以是通过以下几种方式实现:
1. 购买:辐射避难所机器人可以在专门的销售渠道或者在线商店上购买。
不同的机器人可能具备不同的功能和性能,可以根据自身需求选择合适的机器人。
2. 租赁:辐射避难所机器人可以通过租赁的方式获得。
这种方式对于个人或组织来说,可以是一种更经济有效的选择,尤其是在短期需要的情况下。
3. 研发:一些科研机构或者企业可能会自行研发辐射避难所机器人,这需要进行大规模的研发和测试,并可能需要投入大量的资金和资源。
无论是购买、租赁还是自主研发,获得辐射避难所机器人需要考虑机器人的功能、性能、可靠性以及与使用环境的适配等各方面的因素。
银辉间谍机器人说明书
银辉间谍机器人说明书
重要参数:
产品定位:娱乐陪伴,
专业编程控制方式:遥控,手机(蓝牙,APP)
行走方式:轮式。
电池:机器人需要4节5号电池。
外观设计:白色有3种颜色的LED眼睛。
基本参数:
传感器:红外线传感器(自动侦测障碍功能)。
应用功能编程模式:孩子就是动作导演,用遥控器为机器人进行动作编程并下达指令。
路径训练:机器人能够按孩子规划好的路线,自动行走跟进,纸质目的地。
警戒模式:将机器人旋转到90度,直到发出声效,按遥控器上的警戒按钮,将进入警戒模式,在警戒周期内,当检测到前面的物体时,会触发机器人的报警功能,并发出警报声音。
跟随我模式:将遥控器对准机器人,然后按住FOLLOW ME按钮,机器人将自动跟随你的方向运动。
同伴模式:机器人和机器人之间可配对,成功后会同时发出声效,一起玩耍,个数不限。
复读模式:机器人会将你输入的信息转化为机器人语音并复述。
活动模式:机器人会对敲击或拍手等声音作出反应,一下敲击或拍手表示重播录音,超过两下表示移动或者跳舞。
物体携带:将附带的随身托盘安装在机器人上,放置一个物体在托盘(小于或等于150克),机器人会自动平衡自己。
产品材质:ABS塑料及电子元件
产品尺寸:包装尺寸280乘100乘305毫米。
其它特点:省电模式:如果机器人没收到任何输入,每隔15秒便会提示一次,3次结束将自动休眠。
人工智能艾伊莎最新破解

人工智能艾伊莎最新破解随着科技的飞速发展,人工智能的应用已经成为现代社会中不可或缺的一部分。
其中,以聊天机器人为代表的人工智能系统成为了人们日常生活中的朋友和助手。
而在这个领域中,一款名为艾伊莎的人工智能聊天机器人最近又取得了一项重大突破。
艾伊莎是一款由中国科技公司开发的人工智能聊天机器人。
自从它上线以来,就受到了广大用户的喜爱和使用。
作为一款聊天机器人,艾伊莎在日常对话中能够给出回答和建议,帮助人们解决问题和获取信息。
然而,过去的版本并不完美,有时候可能给出错误的答案或无法理解用户的意思。
但是最新破解的艾伊莎则在这些方面取得了重大的突破。
在最新破解的艾伊莎中,首先最引人注目的就是它的语义理解和回答能力的提升。
以往版本的艾伊莎在面对复杂的问题时常常显得无能为力,或者给出的回答只是死板的机器生成文字。
但是经过最新的改进,艾伊莎学会了更好地理解用户的问题,并且能够给出更加灵活和有针对性的回答。
这得益于其强大的自然语言处理功能,能够分析用户的语义和意图,从而给出更准确的答案。
除了语义理解的提升,艾伊莎还引入了机器学习和深度学习的技术,来优化其回答能力。
通过对大量的对话数据进行分析和模型训练,艾伊莎能够根据用户的问题和上下文信息,给出更加智能和灵活的回答。
而这种学习能力的提升是基于艾伊莎智能模型的优化,包括语义解析、知识库和对话生成等方面。
这种机器学习的方法使得艾伊莎的回答变得更加精准和符合用户的需求。
除了在回答能力方面的改进,艾伊莎的开发者还致力于提升其与用户之间的交互体验。
通过情感识别和情感回应的技术,艾伊莎能够更好地理解用户的情绪和情感,并且通过语音和表情等方式给予恰当的回应。
这使得用户和艾伊莎之间的对话更加自然和亲切,仿佛在与一个真正的朋友交流。
而这种人性化的交互体验是通过深度学习和感知技术的结合来实现的。
然而,艾伊莎的破解并不仅仅局限于上述几个方面。
在最新版本中,艾伊莎还加入了一些非传统功能,使得它能够超越传统的聊天机器人的范畴。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
AZW-KP120码垛机器人系统
AZW-KP120四关节码垛机器人
KP120是德国酷卡公司120公斤级码垛搬运机器人,定位精度高、运行速度快、工作范围大,示教作业,简单易操作。
1、码垛机器人的运用行业:
1)箱类包装:啤酒、饮料、乳业、医药、食品、家电等。
2)袋类包装:粮食、化肥、饲料、石化、建材等。
3)桶类包装:桶状包装、涂料桶、化学品罐等。
2、性能指标:
型号KP120
机械结构四关节机器人
动作方式圆柱坐标型
垂直方向2215mm
动作范围水平方向1220mm 底座回转330o 抓手回转360o
负载能力120Kg
动作能力Max:1000包/小时
重复定位精度±0.5mm
本体重量2000Kg
主体高度2215mm
工作环境温度-10-50℃,湿度85%以下
无结露
3、机械结构特点:
1)腰式机座结构,机器人站立更稳固平稳,便于旋转,移动。
2)独特的平行四边形手臂结构设计,保证手臂角度不随手臂伸缩而变化。
3)关节式结构,所有电缆通过手臂手臂内部布置,只有在关节处有微小弯曲动作,简化了电缆布置,延长了电缆弯曲伸缩
的寿命,并且布局美观。
4)关节结构的巧妙设计,使得手臂的伸缩范围达到极致,水平作业范围可达330o,手臂伸缩范围为3200mm。
5)圆柱坐标系,码垛区域明确,更适合码垛作业。
6)丰富多样的抓手形式,可广泛应用石化、饮料、食品、药
品、啤酒、饲料等行业。
4、控制系统特点
1)优化的机器人轨迹规划控制技术。
2)采用的是全伺服机器人驱动控制技术。
3)友善的人机界面。
4)全部源程序自行开发,便于升级、修改、维护及客制化。
5)示教作业,简单易操作。
用户可采用坐标设定或示教法进行图形化操作。
6)AZW抓取线,托盘库,抓手,机器人动作集成系统,集成于台达PLC,协调各机种规律有序安全的完成各动作,以实现自动化码垛目的,控制系统是定速控制各输送机。
(本次方案仅3种产品对应4种码垛格式,层与层之间纸板需人工根据机械节奏放置)。
5、抱箱抓手
1),工作方式
采用两侧板抱夹的方式,并由机器人单独进行控制,每次是从抓取输送线上抓取整列好的1箱产品;
2),工作原理
1),通过汽缸通过推动滑轨运动以夹抱起和放下纸箱产品。
2),通过气缸推出抱钩钩住纸箱底部和放下及回程时脱钩纸箱产品。
3),抓手的压缩空气的要求:
1)压缩空气:≥5.5bar
2)耗气量:6升/分
3)空气质量:3级DIN ISO8673-1
4)粉尘直径:<0.005mm
5)粉尘含量:<5mg/m³
6)油污含量:<1mg/m³
7)露点:-20度
4),抓手对抓取产品要求:
(1)表面须平整;
(2)总重量:≤25kg。
(3)3种产品外形规则尺寸一致。
(4)每批次生产的产品规格须一致。
5),抓手对抓取输送线要求:
(1)抓取输送线输送稳固可靠;
(2)每箱产品在输送线上定位一致,前级需设置黏箱分箱装置。
(3)抓取线四周及底部无影响抓手抓取的障碍物。
6),抓手对放置托盘及输送的要求:
(1)各托盘在输送线上上下左右高低定位须一致
(2)各托盘尺寸须一致
(3)托盘表面须平整;
(4)放置输送线四周无影响抓手放置的障碍物。