ec11旋转编码器的使用方法
旋转编码器控制12864液晶多级菜单显示

(5)、工作电流:2.0mAmax
5、接口说明
管 管脚 电平 脚 号
1 VSS 0V
2 VDD 5.0V
3 V0
说明
逻辑电源地。 逻辑电源正。 LCD 驱动电压,应用时在 VEE 与 V0 之间加一 10K 可调电阻。
4 D/I H/L
5 R/W H/L
6
E H.H/L
7 DB0 H/L
8 DB1 H/L
Line 0 1/0 1/0 1/0 1/0 …………
1/0 1/0 1/0 DB0
Line 1 1/0 1/0 1/0 1/0 …………
1/0 1/0 1/0 DB1
Line 2 1/0 1/0 1/0 1/0 ………… X=0
1/0 1/0 1/0 DB2
Line 3 1/0 1/0 1/0 1/0 …………
(4)、输入电压:Vee~Vdd
(5)、工作温度
:0~55℃(常温) / -20~70℃(宽温)
(6)、保存温度
:-10~65℃
4、电气特性
(1)、输入高电平
:3.5Vmin
(2)、输入低电平(Vil):0.55Vmax
(3)、输出高电平( ):3.75Vmin
(4)、输出低电平(Vol):1.0Vmax
(1)、显示开/关设置
L
L
L
L
H
H
H
H
H H/L
功能:设置屏幕显示开/关。 DB0=H,开显示;DB0=L,关显示。不影响显示 RAM(DD RAM)中的内容。
(2)、设置显示起始行
L
L
H
H
行地址(0~63)
功能:执行该命令后,所设置的行将显示在屏幕的第一行。显示起始行是由 Z 地址计数 器控制的,该命令自动将 A0-A5 位地址送入 Z 地址计数器,起始地址可以是 0-63 范围 内任意一行。Z 地址计数器具有循环计数功能,用于显示行扫描同步,当扫描完一行后 自动加一。
编码器的作用及功能 使用方法
编码器的作用及功能使用方法简而言之,编码器是一种提供反馈的传感设备。
编码器将运动转换为电信号,并可以读取运动控制系统中的某些控制设备,如计数器或PLC。
编码器发送反馈信号,可用于确定位置、计数、速度或方向。
此信息可用于发送特定功能的命令。
市场上最早的编码器主要是解析器。
旋转变压器是一种电磁传感器,也称为同步旋转变压器。
它是一种测量角度的小型交流电机,用于测量旋转物体的轴角位移和角速度。
它由定子和转子组成。
定子绕组作为变压器的一次侧,接受励磁电压,励磁频率通常为400.3000和5000HZ。
转子绕组作为变压器的二次侧,通过电磁耦合获得感应电压。
编码器的作用及功能使用方法? 1.编码器作用电机可以通过编码器获得速度。
其主要原理是编码器可以根据电机输出脉冲数和统计脉冲数获得电机转数。
编码器信号(如位流:BitTorrent)是一种内容分发协议。
它使用高效的软件分发系统和点对点技术来共享大文件(如电影或电视节目),并允许每个用户提供上传服务,如网络重新分配点。
通用下载服务器为发送下载请求的用户提供下载服务。
BitTorrent 的工作方式不同。
分发者或文件持有者将文件发送给其中一个用户,然后将文件转发给其他用户。
用户相互转发自己的文件部分,直到每个用户的下载完成。
这种方法可以使下载服务器在使用大量带宽的同时处理多个大文件的下载请求。
比特流被称为比特流的“簇、散、聚”文件传输协议。
它是由程序员Bram Cohen使用Python求值编写的。
它也是一个开放源码的专利软件,可以免费下载和传播。
)或者准备数据、将其转换为可用通信、以信号形式传输和存储数据的设备。
2.编码器的使用法编码器将角位移或线性位移转换为电信号。
前者称为码盘,后者称为直尺。
编码器使用不同类型的技术来创建信号,包括机械、磁性、电阻和光学信号。
在光学传感器中,编码器根据光的中断提供反馈。
下图描述了使用光学技术的增量旋转编码器的基本结构。
LED光束穿过码盘,码盘上有不透明的线条(很像自行车车轮上的辐条)。
编码器(高速计数器)的使用方法

配件供应
提供编码器原装配件供应,确保维修 质量和设备性能。
06 编码器(高速计数 器)市场发展趋势 与前景展望
市场需求分析
工业自动化需求
编码器作为工业自动化控制系统中的关键部件,其市场需求随着工 业自动化程度的提高而不断增长。
智能制造推动
智能制造的发展对编码器的精度、速度和稳定性提出了更高要求, 推动了编码器市场的进一步发展。
在物流仓储领域,对于物 品计数和传输控制,可选 用具有较高响应频率和稳 定性的增量式编码器。
常见问题解答与误区提示
常见问题
编码器无法正常工作、输出信号不稳定、计数不准确等。
解答与误区提示
检查编码器选型是否正确、参数设置是否合理、接线是否牢固可靠;避免将不同类 型的编码器混淆使用,注意区分分辨率和精度的概念。
调整分辨率
根据实际需求调整编码器的分辨 率,以平衡计数精度和响应速度 之间的关系。
软件优化
通过优化控制算法、提高数据处 理速度等措施,进一步提高整个
系统的性能和稳定性。
安全操作规范提示
电气安全
在接线和调试过程中,务必切断电 源并确保所有电气连接安全可靠, 以防止触电和短路等危险情况发生。
操作规范
在安装和使用编码器时,注意避免 机械碰撞和振动对编码器造成的损 坏,同时确保编码器固定牢固可靠。
03 高速计数器接线 与调试技巧
接线方式及注意事项
接线方式
电缆选择
编码器一般采用差分信号输出,需要将其与 控制器或计数器的差分信号输入端口相连, 注意正负极性的对应。
选择屏蔽双绞线或同轴电缆等高质量电缆, 以减少信号干扰和衰减。
接线长度
接地处理
尽量缩短编码器与控制器或计数器之间的接 线长度,以降低信号衰减和干扰的风险。
旋转编码器调整方法

四:旋转编码器的调整增量式编码器的相位对齐方式在此讨论中,增量式编码器的输出信号为方波信号,又可以分为带换相信号的增量式编码器和普通的增量式编码器,普通的增量式编码器具备两相正交方波脉冲输出信号A和B,以及零位信号Z;带换相信号的增量式编码器除具备A/B/Z 输出信号外,还具备互差120度的电子换相信号U/V/W,U/V/W各自的每转周期数与电机转子的磁极对数一致。
带换相信号的增量式编码器的U/V/W电子换相信号的相位与转子磁极相位,或曰电角度相位之间的对齐方法如下:1.用一个直流电源给电机的U/V绕组通以小于额定电流的直流电,U入,V出,将电机轴定向至一个平衡位置.2.用示波器观察编码器的U相信号和Z信号.3.调整编码器转轴与电机轴的相对位置.4.一边调整,一边观察编码器U和Z相信号跳变沿,直到Z信号稳定在高电平上(在此默认Z信号的常态为低电平),锁定编码器与电机的相对位置关系。
5.来回扭转电机轴,撒手后,若电机轴每次自由回复到平衡位置时,Z信号都能稳定在高电平上,则对齐有效。
撤掉直流电源后,验证如下:1.用示波器观察编码器的U相信号和电机的U/V线反电势波形。
2.转动电机轴,编码器的U相信号上升沿与电机的U/V线反电势波形由低到高的过零点重合,编码器的Z信号也出现在这个过零点上。
上述验证方法,也可以用作对齐方法。
需要注意的是,此时增量式编码器的U相信号的相位零点即与电机UV线反电势的相位零点对齐,由于电机的U相反电势,与UV线反电势之间相差30度,因而这样对齐后,增量式编码器的U相信号的相位零点与电机U相反电势的-30度相位点对齐,而电机电角度相位与U相反电势波形的相位一致,所以此时增量式编码器的U相信号的相位零点与电机电角度相位的-30度点对齐。
有些伺服企业习惯于将编码器的U相信号零点与电机电角度的零点直接对齐,为达到此目的,可以:1.用3个阻值相等的电阻接成星型,然后将星型连接的3个电阻分别接入电机的UVW三相绕组引线;2.以示波器观察电机U相输入与星型电阻的中点,就可以近似得到电机的U相反电势波形。
旋转编码器工作方式图解

旋转编码器旋转编码器是由光栅盘(又叫分度码盘)和光电检测装置(又叫接收器)组成。
光栅盘是在一定直径的圆板上等分地开通若干个长方形孔。
由于光栅盘与电机同轴,电机旋转时,光栅盘与电机同速旋转,发光二极管垂直照射光栅盘,把光栅盘图像投射到由光敏元件构成的光电检测装置(接收器)上,光栅盘转动所产生的光变化经转换后以相应的脉冲信号的变化输出。
编码器码盘的材料有玻璃、金属、塑料等。
玻璃码盘是在玻璃上沉积很薄的刻线,其热稳定性好,精度高。
金属码盘直接以通和不通刻线,不易碎,但由于金属有一定的厚度,精度就有限制,其热稳定性也比玻璃的差一个数量级。
塑料码盘成本低廉,但精度、热稳定性、寿命均要差一些。
编码器以信号原理来分,有增量式编码器(SPC)和绝对式编码器(APC),顾名思义,绝对式编码器可以记录编码器在一个绝对坐标系上的位置,而增量式编码器可以输出编码器从预定义的起始位置发生的增量变化。
增量式编码器需要使用额外的电子设备(通常是PLC、计数器或变频器)以进行脉冲计数,并将脉冲数据转换为速度或运动数据,而绝对式编码器可产生能够识别绝对位置的数字信号。
综上所述,增量式编码器通常更适用于低性能的简单应用,而绝对式编码器则是更为复杂的关键应用的最佳选择--这些应用具有更高的速度和位置控制要求。
输出类型取决于具体应用。
一:增量式旋转编码器工作原理增量式旋转编码器通过两个光敏接收管来转化角度码盘的时序和相位关系,得到角度码盘角度位移量的增加(正方向)或减少(负方向)。
增量式旋转编码器的工作原理如下图所示。
图中A、B两点的间距为S2,分别对应两个光敏接收管,角度码盘的光栅间距分别为S0和S1。
当角度码盘匀速转动时,可知输出波形图中的S0:S1:S2比值与实际图的S0:S1:S2比值相同,同理,当角度码盘变速转动时,输出波形图中的S0:S1:S2比值与实际图的S0:S1:S2比值仍相同。
通过输出波形图可知每个运动周期的时序为:我们把当前的A、B输出值保存起来,与下一个到来的A、B输出值做比较,就可以得出角度码盘转动的方向,如果光栅格S0等于S1时,也就是S0和S1弧度夹角相同,且S2等于S0的1/2,那么可得到此次角度码盘运动位移角度为S0弧度夹角的1/2,再除以所用的时间,就得到此次角度码盘运动的角速度。
编码器的使用方法及注意事项

编码器的使用方法及注意事项(最新版4篇)目录(篇1)I.编码器的定义和作用II.编码器的种类和使用方法III.编码器的使用注意事项IV.总结正文(篇1)编码器是一种将模拟信号转换为数字信号的设备,广泛应用于工业自动化、物联网、智能家居等领域。
以下是编码器的使用方法及注意事项:一、编码器的定义和作用编码器是一种将模拟信号转换为数字信号的设备,其主要作用是实现对物理量的测量和控制。
常见的编码器有光电编码器、磁编码器、超声编码器等。
二、编码器的种类和使用方法1.光电编码器:光电编码器是一种利用光电效应将旋转角度转换为数字信号的设备。
使用光电编码器时,需要将传感器固定在旋转部件上,并将编码盘固定在旋转轴上。
通过读取传感器输出的数字信号,可以实现对旋转角度的测量和控制。
2.磁编码器:磁编码器是一种利用磁感应原理将旋转角度转换为数字信号的设备。
使用磁编码器时,需要将传感器固定在旋转部件上,并将编码盘固定在旋转轴上。
通过读取传感器输出的数字信号,可以实现对旋转角度的测量和控制。
3.超声编码器:超声编码器是一种利用超声波原理将旋转角度转换为数字信号的设备。
使用超声编码器时,需要将传感器固定在旋转部件上,并将超声波发生器和接收器分别安装在旋转轴和旋转部件上。
通过读取传感器输出的数字信号,可以实现对旋转角度的测量和控制。
三、编码器的使用注意事项1.确保编码器与被测物体之间的距离和角度正确,避免误差。
2.在使用光电编码器时,需要注意传感器的清洁和维护,避免灰尘和油污对测量精度的影响。
目录(篇2)I.编码器的定义和作用II.编码器的使用方法III.编码器的注意事项正文(篇2)I.编码器的定义和作用编码器是一种将模拟信号转换为数字信号的设备,常用于测量和监控设备的运行状态。
编码器可以将设备的速度、位置、旋转方向等参数转换成数字信号,从而实现对设备的自动化控制。
II.编码器的使用方法1.确认编码器的连接方式:编码器通常采用串口或网络接口与控制系统连接。
编码器开关原理

一、编码器(编码开关)原理及使用方法
旋转编码器、数码电位器、Rotary Encoder。
它具有左转,右转功能,有的旋转编码开关还有按下功能。
使用方法:EC11型编码开关为例:
三只脚:123脚一般是中间2脚接地,1、3脚上拉电阻后,当左转、右转旋转时,在1、3脚就有脉冲信号输出了。
两只脚:按压开关,按下时导通,回复时断开。
二、在单片机编程时,左转和右转的判别是难点,用示波器观察这种开关左转和右转时
两个输出脚的信号有个相位差.由此可见,如果输出1为高电平时,输出2出现一
个高电平,这时开关就是向顺时针旋转;当输出1为高电平,输出2出现一个低
电平,这时就一定是逆时针方向旋转。
所以,在单片机编程时只需要判断当输
出1为高电平时,输出2当时的状态就可以判断出是左旋转或是右旋转了。
了解EC11旋转编码器,编写EC11旋转编码器驱动程序。

了解EC11旋转编码器,编写EC11旋转编码器驱动程序。
⼀、EC11旋转编码器基本认识(1)、ALPS旋转编码器选型垂直型(2)、ALPS旋转编码器选型侧装型(3)、ALPS旋转编码器选型机械尺⼨图(4)、ALPS旋转编码器选型引脚图(5)、ALPS旋转编码器选型内部触点开关结构图(6)、ALPS旋转编码器选型时序图1、接外部上拉电阻,适⽤于浮空输⼊和输⼊上拉模式的IO⼝,如下图所⽰。
2、⽆外部上拉电阻,⼏乎所有单⽚机IO⼝都可以设置为输⼊上拉模式的IO⼝,如下图所⽰。
⼆、EC11旋转编码器初级认识(1)、EC11旋转编码器按旋转出动作EC11旋转编码器按旋转的输出动作分为2种,⼀种就是转⼀格,A、B对C端输出⼀个完整脉冲,简称⼀定位⼀脉冲;另⼀种是转两格,A、B对C端输出⼀个完整脉冲(转⼀格就只是由低电平---⾼电平或由⾼电平---低电平),简称两定位⼀脉冲。
(2)、EC11旋转编码器按旋转出动作:⼀定位⼀脉冲1、⼀定位⼀脉冲EC11旋转编码器转动⼀格输出波形图解释上图:⼀定位⼀脉冲的EC11旋转编码器按测试电路图的接法,在静⽌的时候A、B两线输出都是⾼电平。
转动⼀格,A、B两线各⾃输出⼀个低电平脉冲,然后⼜回到⾼电平状态,对应于EC11旋转编码器内部A、B两个触点开关的动作为:断开---闭合---断开。
(3)、EC11旋转编码器按旋转出动作:两定位⼀脉冲1、两定位⼀脉冲EC11旋转编码器转动⼀格输出下降沿波形图2、两定位⼀脉冲EC11旋转编码器转动⼀格输出上升沿波形图解释上两图:两定位⼀脉冲的EC11旋转编码器稍微复杂⼀些,转动⼀格只会输出半个脉冲。
静⽌时,A、B触点开关可以是断开的也可以是闭合的。
若初始状态时A、B都是⾼电平,转动⼀格就输出从⾼电平到低电平的下降沿,随后⼀直输出低电平,对应于EC11旋转编码器内部A、B两个触电开关的动作为断开---闭合。
若初始状态时A、B都是低电平,转动⼀格就输出从低电平到⾼电平的上升沿,随后⼀直输出低电平,对应于EC11旋转编码器内部AB两个触点开关的动作为闭合---断开。
EC11系列编码器基本信息说明书
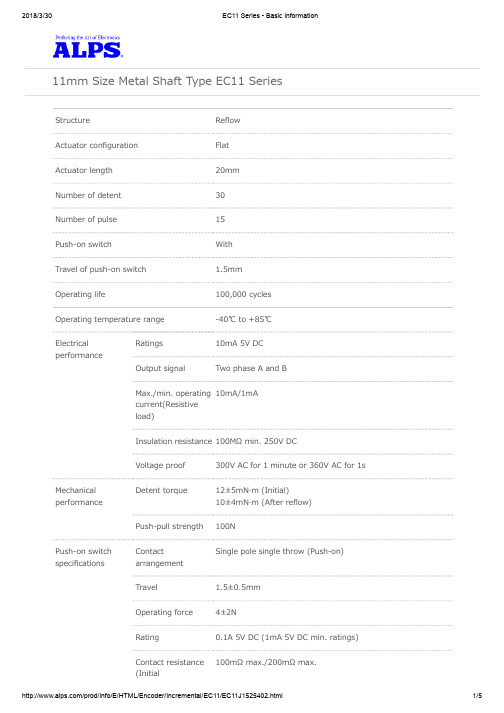
Structure ReflowActuator configuration FlatActuator length20mmNumber of detent30Number of pulse15Push-on switch WithTravel of push-on switch 1.5mmOperating life100,000 cyclesOperating temperature range-40℃ to +85℃ElectricalperformanceRatings10mA 5V DCOutput signal Two phase A and BMax./min. operatingcurrent(Resistiveload)10mA/1mAInsulation resistance100MΩ min. 250V DCVoltage proof300V AC for 1 minute or 360V AC for 1sMechanical performance Detent torque12±5mN·m (Initial)10±4mN·m (After reflow) Push-pull strength100NPush-on switch specifications ContactarrangementSingle pole single throw (Push-on) Travel 1.5±0.5mmOperating force4±2NRating0.1A 5V DC (1mA 5V DC min. ratings)Contact resistance(Initial100mΩ max./200mΩ max.11mm Size Metal Shaft Type EC11 Seriesperformance/Afterlifetime)Operating life100,000 timesJapan600 Minimum order unit(pcs.)Export600 DimensionsMounting Hole DimensionsOutput WaveSliding NoiseAt R=5kΩ Chattering: 3ms max. Bounce: 2ms max.Packing SpecificationsTray1 case / Japan300Number of packages(pcs.)6001 case / exportpackingExport package measurements (mm)369×283×263Soldering ConditionsExample of Reflow Soldering Condition1. Heating methodDouble heating method with infrared heater.2. Temperature measurementThermocouple 0.1 to 0.2 Φ CA (K) or CC (T) at soldering portion (copper foil surface). A heat resisting tape should be used for fixed measurement.3. Temperature profileA B C D E F G H No. of reflows 260℃230℃180℃150℃ 2 min.max.3s40s 4 min.max. 2 time max.(1)When using an infrared reflow oven, solder may sometimes not be applied. Be sure to use a hot airreflow oven or a type that uses infrared rays in combination with hot air.(2)The temperatures given above are the maximum temperatures at the terminals of the potentiometer when employing a hot air reflow method. The temperature of the PC board and the surface temperature of the potentiometer may vary greatly depending on the PC board material, its size and thickness. Ensure that the surface temperature of the potentiometer does not rise to 250°C or greater.(3)Conditions vary to some extent depending on the type of reflow bath used. Be sure to give due consideration to this prior to use.Reference for Hand SolderingTip temperature350±10℃ max.Soldering time3(+1, 0)sNo. of solders 2 timeProduct VarietiesSingle-shaft Type1) Knurled Type Unit : mm Style (Shaft diameter : φ5.975)2) Flat Type Unit : mm Style (Shaft diameter : φ5.975)3) Slotted Type Unit : mm Style (Shaft diameter : φ5.975)Notes are common to this series/models.1. This site catalog shows only outline specifications. When using the products, please obtain formalspecifications for supply.2. Please place purchase orders per minimum order unit (integer).3. Products other than those listed in the above chart are also available. Please contact us for details.4. This products can be used in vehicles.Although these products are designed to perform over a wide operating temperature range, please ensure that you receive and read the formal delivery specifications before use.。
旋转编码器使用方法
旋转编码器使用方法使用方法一:修改驱动程序旋转编码器属于精密仪器,在其使用过程中需通过程序发出指令,才能起到特定的作用,而根据不同环境下的需求,需要设定不同的驱动程序,所以说决定编码器使用效果怎么样,修改合适的驱动程序是非常重要的。
通常情况下只要直接修改reg文件,同时注册一个表文件,利用添加的方式改写动态链接,在确定动态链接已经修改好的情况下,需要将其添加到内核中;使用方法二:硬件接口连接驱动程序修改好之后,下面就是硬件接口连接操作,在连接中,通常有A和B两个集电极输出接口,为确保线路衔接性,需要在3.3V 上的电阻上进行操作,将A和B两个接口分别插到CPU上。
在硬件接口连接成功之后,以防万一,须做好测试工作检查电压输出端高低压数值是否正确,比如在按下按钮之后,如果P2端口输出值是高电平的话,说明连接正确;使用方法三:流接口驱动程序的编写流接口驱动程序的编写是为下面的中断服务程序做准备,具体编写步骤是创建线程实现变量值的记录,同时记录在线路中断的情况下,各端口的数值是否还是高电平;使用方法四:中断服务程序的编写终端服务程序编写主要是起到编码器线路保护作用。
通过对CPU 的I/O接口进行初始化工作,在此基础上编写中断服务程序。
旋转编码器使用说明1. 确定检测对象,测速、测距、测角位移还是计数等。
2.仅用于动态过程还是包含静态位置或状态。
3.确认是择增量型旋转编码器还是绝对型旋转编码器。
4.确定对象的运动范围。
5.确认是选择单圈绝对型旋转编码器还是多圈绝对型旋转编码器。
6.确定对象的最高速度或频率。
7.确定对象的精度要求。
8.确定选择旋转编码器的应用参数。
9. 使用环境,注意旋转编码器的接口方式和保护等级。
旋转编码器接线方法

旋转编码器接线方法
旋转编码器分为两种类型,一种是带按钮的,一种是不带按钮的。
接线方法如下:带按钮的旋转编码器接线方法:
1. 将旋转编码器的VCC引脚连接至电源正极。
2. 将旋转编码器的GND引脚连接至电源负极。
3. 将旋转编码器的开关引脚连接至电源正极。
4. 将旋转编码器的A相信号线连接至单片机的一个IO口。
5. 将旋转编码器的B相信号线连接至单片机的另一个IO口。
6. 将旋转编码器的按钮引脚连接至单片机的一个IO口。
不带按钮的旋转编码器接线方法:
1. 将旋转编码器的VCC引脚连接至电源正极。
2. 将旋转编码器的GND引脚连接至电源负极。
3. 将旋转编码器的A相信号线连接至单片机的一个IO口。
4. 将旋转编码器的B相信号线连接至单片机的另一个IO口。
注意事项:
1. 不同的编码器型号接口可能会有所不同,请根据具体型号的接口引脚图进行接线。
2. 如果编码器内部有光电传感器,连接时需要注意光电传感器管脚的方向,否则可能导致编码器无法工作。
3. 接线时需要注意电源的极性,如果接反了可能会烧坏编码器。
stm32 ec11的几种准确计数方法
stm32 ec11的几种准确计数方法下载提示:该文档是本店铺精心编制而成的,希望大家下载后,能够帮助大家解决实际问题。
文档下载后可定制修改,请根据实际需要进行调整和使用,谢谢!本店铺为大家提供各种类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by this editor. I hope that after you download it, it can help you solve practical problems. The document can be customized and modified after downloading, please adjust and use it according to actual needs, thank you! In addition, this shop provides you with various types of practical materials, such as educational essays, diary appreciation, sentence excerpts, ancient poems, classic articles, topic composition, work summary, word parsing, copy excerpts, other materials and so on, want to know different data formats and writing methods, please pay attention!STM32 EC11的几种准确计数方法引言在使用STM32微控制器及其配套的EC11编码器时,准确计数是实现许多应用的关键。
e11旋转编码器原理 -回复
e11旋转编码器原理-回复旋转编码器是一种常见的位置传感器,用于测量物体的旋转角度。
它在机械、自动化、电子和通信等领域都有广泛的应用。
旋转编码器的原理是基于光学或磁学的测量技术,利用旋转的物体上固定的编码盘或磁极与传感器间的信号变化,来确定物体的旋转角度。
本文将详细介绍旋转编码器的原理和其工作过程。
一、旋转编码器的基本原理旋转编码器的基本原理是利用光学或磁学原理测量物体的旋转角度。
光学式旋转编码器通过光源和光敏器件来测量光线的变化;磁学式旋转编码器则利用磁场的变化来测量物体的旋转角度。
二、光学式旋转编码器的原理及工作过程光学式旋转编码器由光源、光栅、光敏器件和信号处理电路等组成。
光源发出的光线经过光栅分解成一系列等间距的光斑,然后传输到光敏器件上。
当编码盘开始旋转时,光斑经过编码盘上的透光孔或光敏信号区域时,会有一定的光线被遮挡或透射,这样就形成了一个周期性的光强变化。
光敏器件会接收到这种变化,并转换为相应的电信号,通过信号处理电路对这些电信号进行处理和解码,从而得到物体的旋转角度。
三、磁学式旋转编码器的原理及工作过程磁学式旋转编码器主要由磁性编码盘和磁敏传感器组成。
编码盘上有一系列的磁极,每个磁极代表一个编码单位,使得编码盘在旋转过程中可以产生一个周期性的磁场变化。
磁敏传感器的作用是探测和测量这个磁场变化,并将其转换为相应的电信号。
磁敏传感器可以是霍尔元件、磁电阻元件或磁电感元件等。
四、旋转编码器的工作方式旋转编码器一般有两种工作方式:增量式和绝对式。
1. 增量式旋转编码器:增量式旋转编码器通过测量输出信号的变化来确定物体的旋转角度。
它的工作原理是根据每个编码单位产生的信号变化来计算物体的旋转角度,一般有两个输出信号:一个是A相信号,另一个是B相信号。
这两个信号之间存在一定的相位差,可以通过相位差的变化来确定旋转方向。
增量式旋转编码器的优点是结构简单、成本低廉,但需要一个初始位置的参考。
2. 绝对式旋转编码器:绝对式旋转编码器可以直接测量物体的具体旋转角度,不需要参考位置。
EC110901K2B旋转开关编码器
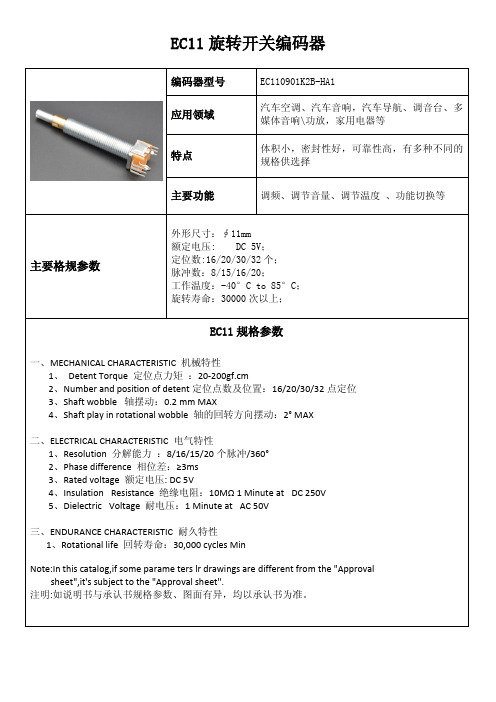
EC11旋转开关编码器编码器型号EC110901K2B-HA1应用领域汽车空调、汽车音响,汽车导航、调音台、多媒体音响\功放,家用电器等特点体积小,密封性好,可靠性高,有多种不同的规格供选择主要功能调频、调节音量、调节温度、功能切换等主要格规参数外形尺寸:∮11mm额定电压:DC5V;定位数:16/20/30/32个;脉冲数:8/15/16/20;工作温度:-40°C to85°C;旋转寿命:30000次以上;EC11规格参数一、MECHANICAL CHARACTERISTIC机械特性1、Detent Torque定位点力矩:20-200gf.cm2、Number and position of detent定位点数及位置:16/20/30/32点定位3、Shaft wobble轴摆动:0.2mm MAX4、Shaft play in rotational wobble轴的回转方向摆动:2°MAX二、ELECTRICAL CHARACTERISTIC电气特性1、Resolution分解能力:8/16/15/20个脉冲/360°2、Phase difference相位差:≥3ms3、Rated voltage额定电压:DC5V4、Insulation Resistance绝缘电阻:10MΩ1Minute at DC250V5、Dielectric Voltage耐电压:1Minute at AC50V三、ENDURANCE CHARACTERISTIC耐久特性1、Rotational life回转寿命:30,000cycles MinNote:In this catalog,if some parame ters lr drawings are different from the"Approval sheet",it's subject to the"Approval sheet".注明:如说明书与承认书规格参数、图面有异,均以承认书为准。
旋转编码器调整方法word精品文档10页
四:旋转编码器的调整增量式编码器的相位对齐方式在此讨论中,增量式编码器的输出信号为方波信号,又可以分为带换相信号的增量式编码器和普通的增量式编码器,普通的增量式编码器具备两相正交方波脉冲输出信号A和B,以及零位信号Z;带换相信号的增量式编码器除具备A/B/Z 输出信号外,还具备互差120度的电子换相信号U/V/W,U/V/W各自的每转周期数与电机转子的磁极对数一致。
带换相信号的增量式编码器的U/V/W电子换相信号的相位与转子磁极相位,或曰电角度相位之间的对齐方法如下:1.用一个直流电源给电机的U/V绕组通以小于额定电流的直流电,U入,V出,将电机轴定向至一个平衡位置.2.用示波器观察编码器的U相信号和Z信号.3.调整编码器转轴与电机轴的相对位置.4.一边调整,一边观察编码器U和Z相信号跳变沿,直到Z信号稳定在高电平上(在此默认Z信号的常态为低电平),锁定编码器与电机的相对位置关系。
5.来回扭转电机轴,撒手后,若电机轴每次自由回复到平衡位置时,Z信号都能稳定在高电平上,则对齐有效。
撤掉直流电源后,验证如下:1.用示波器观察编码器的U相信号和电机的U/V线反电势波形。
2.转动电机轴,编码器的U相信号上升沿与电机的U/V线反电势波形由低到高的过零点重合,编码器的Z信号也出现在这个过零点上。
上述验证方法,也可以用作对齐方法。
需要注意的是,此时增量式编码器的U相信号的相位零点即与电机UV线反电势的相位零点对齐,由于电机的U相反电势,与UV线反电势之间相差30度,因而这样对齐后,增量式编码器的U相信号的相位零点与电机U相反电势的-30度相位点对齐,而电机电角度相位与U相反电势波形的相位一致,所以此时增量式编码器的U相信号的相位零点与电机电角度相位的-30度点对齐。
有些伺服企业习惯于将编码器的U相信号零点与电机电角度的零点直接对齐,为达到此目的,可以:1.用3个阻值相等的电阻接成星型,然后将星型连接的3个电阻分别接入电机的UVW三相绕组引线;2.以示波器观察电机U相输入与星型电阻的中点,就可以近似得到电机的U相反电势波形。
编码器使用说明
编码器使用说明光电编码器基础1.1 概述光电编码器是一种集光、机、电为一体的数字化检测装置,它具有分辨率高、精度高、结构简单、体积小、使用可靠、易于维护、性价比高等优点。
近10几年来,发展为一种成熟的多规格、高性能的系列工业化产品,在数控机床、机器人、雷达、光电经纬仪、地面指挥仪、高精度闭环调速系统、伺服系统等诸多领域中得到了广泛的应用。
光电编码器可以定义为:一种通过光电转换,将输至轴上的机械、几何位移量转换成脉冲或数字量的传感器,它主要用于速度或位置(角度)的检测。
典型的光电编码器由码盘(Disk)、检测光栅(Mask)、光电转换电路(包括光源、光敏器件、信号转换电路)、机械部件等组成。
一般来说,根据光电编码器产生脉冲的方式不同,可以分为增量式、绝对式以及复合式三大类。
按编码器运动部件的运动方式来分,可以分为旋转式和直线式两种。
由于直线式运动可以借助机械连接转变为旋转式运动,反之亦然。
因此,只有在那些结构形式和运动方式都有利于使用直线式光电编码器的场合才予使用。
旋转式光电编码器容易做成全封闭型式,易于实现小型化,传感长度较长,具有较长的环境适用能力,因而在实际工业生产中得到广泛的应用,在本书中主要针对旋转式光电编码器,如不特别说明,所提到的光电编码器则指旋转式光电编码器。
1.2 增量式光电编码器1.2.1 原理及其结构增量式光电编码器的特点是每产生一个输出脉冲信号就对应于一个增量位移,但是不能通过输出脉冲区别出在哪个位置上的增量。
它能够产生与位移增量等值的脉冲信号,其作用是提供一种对连续位移量离散化或增量化以及位移变化(速度)的传感方法,它是相对于某个基准点的相对位置增量,不能够直接检测出轴的绝对位置信息。
一般来说,增量式光电编码器输出A、B两相互差电度角的脉冲信号(即所谓的两组正交输出信号),从而可方便地判断出旋转方向。
同时还有用作参考零位的Z相标志(指示)脉冲信号,码盘每旋转一周,只发出一个标志信号。
极少代码搞定EC11编码器

极少代码搞定EC11编码器,简单好用,无论怎么折腾都没有乱码最近要用到编码器,我根底浅都没用过,于是在网上查各种资料和别人的程序片段,但是感觉要么太复杂要么就是不稳定,于是我熬夜苦试了两天,终于找到一种简单可行又稳定的方法,希望可以帮助到兄弟姐妹们。
废话不多说,让我先带大家来看看效果吧!测试程序作用很简单,编码器正转一次就发送一个0X11到串口,编码器反转一次就发送一次0X00到串口。
先来一套左勾拳,正转个2000次,中间又有快又有慢。
屏幕一片11没有00的影子,奈斯!再来一套右勾拳,反转个2000次,中间又有快又有慢。
屏幕一片00没有11的影子,欧耶!再来个混合双打,正转一把又反转一把,一共1000次,动作还是有快有慢!手拧疼了。
每条11中间没有出现00,00中间也没出现11。
暴力输出5000次没有出现一个乱码,可靠性还是过得去的,那让我们来看看是怎么做的吧。
这是编码器正转的时序,上面的是A通道下面的是B通道,用数字表示是这样通道 TD TA TB TC TDA 1 0 0 1 1B 1 1 0 0 1编码器反转时序是这样的,一样的上面是A通道下面的是B通道这是编码器反转的时序,上面的是A通道下面的是B通道,用数字表示是这样通道 TD TA TB TC TDA 1 1 0 0 1B 1 0 0 1 1所以正转反转只是A和C区域不一样,这是我们检测的重点,我看到许多方案只识别A区域,然后while等待D区域,但是我实验的时候由很多乱码,特别是正转的时候,抓了时序发现是这样的第一种情况通过延时消抖没有问题,但是第二种情况如果采用识别单个区间就妥妥的会触发正转,所以最好的方法是全局判断A B C D四个区域但是我看了网上的案例大多都非常复杂,都升不起抄袭欲。
啊不!是借鉴欲望!为什么这么复杂呢?原因在于重要的C区间:这是我转的比较快的时候的抓取的逻辑时序,正转的时间窗口只有0.9ms,前段时间我还抓取到0.4ms的时间窗口,反转的情况好点,反转时间窗口往往是正转的两倍,所以只要做好了正转那么反转一般没什么问题。