旋转编码开关(Rotary Encoder switch)-使用说明及程序
旋转编码开关的使用和分析

断路器分类
二、磁断路器 磁断路器为大多数设计问题提供了精度和可靠性较高的成本效益型解决 方案。 磁断路器的过流检测机理是只对被保护电路里的电流变化做出响应,由 于其电流感应螺线管受环境温度变化的影响不大,因此磁断路器具有温 度稳定性,不会像热断路器那样明显地受到环境温度变化的影响。 磁断路器没有预热阶段,因此不会减缓断路器对过载的响应速度,从过 载结束到其复位之前没有冷却期。 可以从四个独立的方面对磁断路器的特性进行有针对性的调整:断路器 所需的电路;跳闸点(以安培计);延迟时间(以秒计)和浪涌处理能 力。对这些因素所做的调整对断路器短路分断能力的影响极小。 一般而言,目前有三种跳闸时间延迟曲线各不相同的磁断路器可供选择: 慢速、中速和快速。当对级联电路和判别电路中的断路器进行匹配时, 这些可供选择的曲线为设计师提供了很高的设计灵活性。 此外,对于常常需要承受巨大涌入电流的设备,还可以选择具备特殊涌 入结构的磁断路器。但是,当设备位置不稳定时,由于磁断路器的跳闸 次数会因螺线管的运动受重力的影响而发生变化,此时热断路器或许是 一个比较好的选择。 磁断路器的应用领域涵盖了很多市场,比如电信、船舶、电器、工业自 动化和控制以及医疗设备。
断路器结构分析
6 实现断路器多种安装接线方式的附件 断路器的安装接线方式除最常见的板前接线方式外,还有板后 接线方式和插入式接线方式。 (1)板后接线方式采用板后接线装置。 (2)插入式接线方式采用插入式安装台。 7 其他 辅助接点装置是专门为带有机内附件的插入式接线方式配套的 附属装置。 电操机构不仅是一种远距离操作断路器的机外附件,也常用于 630A以上开关的现场操作(大开关手操较费力)。 塑壳断路器的安装方式和接线方式并不是一回事。按安装方式 分有固定式(适用于抽屉柜),插入式/抽出式(适用于固定柜); 按接线方式分,不论固定式和插入式/抽出式,都有板前接线、板后 接线,有些产品有专用的电缆或母线的前/后接线端子。
奥姆龙A6A-10RW-拨码开关(旋转式)-说明书

A6ADIP Switch (Rotary Type)Select the Right Rotary DIP Switch for the Type of Operation■Series includes a standard type that can be oper-ated from the top or side, an extended shaft type that can be operated while mounted on a panel,and a flat type.■A slider lock and rotating PCB system ensure sta-ble contact reliability.■Completely sealed construction prevents fluxentry during automatic flow soldering.Ordering InformationNote: 1.Contact your OMRON sales representative to request special markings or designations. 2.The standard packing configuration is units of 100 per box.Type (rotor color)Standard type(Black)Flat type (White)Extended shaft type(White)Thumbwheel type(White)No. of switching positions AppearanceOutput code10BCD/hexadecimal 1-2-4-8 code A6A-10R A6A-10RF A6A-10RS A6A-10RW BCD/hexadecimal 1-2-4-8 complement codeA6A-10CA6A-10CFA6A-10CSA6A-10CW16BCD/hexadecimal 1-2-4-8 code A6A-16R A6A-16RF A6A-16RS A6A-16RW BCD/hexadecimal 1-2-4-8 complement codeA6A-16CA6A-16CFA6A-16CSA6A-16CWSpecifications■Ratings/Characteristics10-position Models16-position ModelsNote:“●” indicates that the internal switch is ON.Switching capacity 1 mA to 0.1 A at 5 to 28 VDC (switching current)Ambient temperature Operating: –10 to 70°C (no icing)Ambient humidity 85% max.Insulation resistance 10 M W min. (at 250 VDC)Contact resistance 200 m W max. (initial value)Dielectric strength 500 VAC at 50/60 Hz for 1min between ground and the charging plate 250 VAC at 50/60 Hz for 1min between terminals of the same polarity Vibration resistance Malfunction: 10 to 55 Hz, 1.5 mm double amplitude Shock resistance Malfunction: 300 m/s 2 min.Operating force 1.18 to 2.45 ´ 10-2 N·m WeightApprox. 0.75g for the A6A-10RTypeBCD/hexadecimal 1-2-4-8 codeBCD/hexadecimal 1-2-4-8 complementcode Terminal N o.12481248Position 0●●●●1●●●●2●●●●3●●●●4●●●●5●●●●6●●●●7●●●●8●●●●9●●●●TypeBCD/hexadecimal 1-2-4-8 codeBCD/hexadecimal 1-2-4-8 complementcode Terminal N o.12481248Position 0●●●●1●●●●2●●●●3●●●●4●●●●5●●●●6●●●●7●●●●8●●●●9●●●●A ●●●●B ●●●●C ●●●●D ●●●●E ●●●●F ●●●●DimensionsNote:All units are in millimeters unless otherwise indicated.Standard Type, 10 PositionsA6A-10R, A6A-10CStandard Type, 16 PositionsA6A-16R, A6A-16CFlat Type, 10 PositionsA6A-10RF, A6A-10CFFlat Type, 16 PositionsA6A-16RF, A6A-16CF(slot depth: 0.9)(slot depth: 0.9)(slot depth: 0.9)(slot depth: 0.9)Extended Shaft Type, 16 Positions4 dia.4 dia.Extended Shaft Type, 10 PositionsA6A-10RS, A6A-10CSA6A-16RS, A6A-16CSInstallationPrecautionsBe sure to refer to General Precautions on pages 4 to 6 for details on proper use.Thumbwheel Type, 10 PositionsA6A-10RW, A6A-10CWThumbwheel Type, 16 PositionsA6A-16RW, A6A-16CW4 dia.9.5 dia.9.5 dia.4 dia.Terminal arrangement (bottom view)Mounting holes (top view)0.8-dia. holes (0.9 dia. for automatic insertion)ALL DIMENSIONS SHOWN ARE IN MILLIMETERS.To convert millimeters into inches, multiply by 0.03937. To convert grams into ounces, multiply by 0.03527.Cat. No. A050-E1-05。
海德汉_旋转编码器说明书
旋转编码器2012年11月带安装式定子联轴器的旋转编码器分离式联轴器的旋转编码器本样本是以前样本的替代版,所有以前版本均不再有效。
订购海德汉公司的产品仅以订购时有效的样本为准。
产品遵循的标准(ISO,EN等),请见样本中的标注。
海德汉公司的旋转编码器是测量旋转运动、角速度的传感器,也可与机械测量设备一起使用,例如丝杠,测量直线运动。
应用领域包括电机、机床、印刷机、木工机器、纺织机器、机器人和运送设备以及各种测量,测试和检验设备。
高质量正弦增量信号可进行高倍率细分,用于数字速度控制。
电子手轮2目录选型指南标准用途的旋转编码器供电电源3.6至5.25 V DC2) 内部2倍频细分后最大至10 000个信号周期数3) 内部5/10倍频细分后最大至36 000个信号周期(如果需要更高细分倍数,可提供)42634 ERN 480000至5 000线405选型指南标准用途的旋转编码器内部2倍频细分后最大周期数为10 0002) 内部5/10倍频细分后最大至36 000个信号周期(如果需要更高细分倍数,可提供)642 50 54 7选型指南电机旋转编码器内部2倍频细分后8 192个信号周期2) 内部5/10/20/25倍频细分后37 500个信号周期8参见产品信息910供电电源3.6至5.25 V DC2)内部2倍频细分后最大至10 000个信号周期数3)内部2倍频细分后8 192个信号周期4)根据用户要求,可提供盲孔轴版选型指南特殊用途的旋转编码器40请见产品概要:应用于电梯行业的旋转编码器请见产品概要:11测量原理测量基准测量方法海德汉公司的光学扫描型光栅尺或编码器的测量基准都是周期刻线-光栅。
这些光栅刻在玻璃或钢材基体上。
这些精密光栅通过多种光刻工艺制造。
光栅的制造方式有:•在玻璃上镀硬铬线•在镀金钢带上蚀刻线条,或者•在玻璃或钢材基体上蚀刻三维结构图案。
海德汉公司开发的光刻工艺生产的栅距典型值为50 µm至4 µm。
GF4C旋转限位开关(黄盒子)使用说明书

目录1、概述 (2)2、Technical Specifications 技术规格 (3)3、Technical Specifications of the Switches 开关技术规格 (3)4、Standard Limit Switch Codes 标准的限位开关编码 (4)5、Use and Maintenance Instructions 使用和维护说明书 (4)5.1、Steps for the proper installation of the limit switch 限位开关安装步骤 (6)5.2 、Periodic maintenance steps 定期维护步骤 (7)附录1 GF4C限位开关部件明细图 (9)GF4C旋转限位开关(黄盒子)1、概述The rotary limit switch is used to control the movement of industrial machinery. It operates 旋转限位开关被用来控制工业机械的运转,as an auxiliary controller of electrical motors through a power interface, such as a contactor or通过电源接口连接作为电动机的一个辅助控制器,好比一个开关或者PLC。
PLC . Suitable for heavy duty, its shaft is connected to the motor and, after a set number of revolutions ,the cams operate the switches, thus starting the predetermined movement . A worm 适用于重载,它的轴连接到电机,并且通过设置转数控制开关,实现预设的操作。
一个涡轮gear and a helical toothed gear combined with one or more pairs of straight toothed gears are used for the transmission of the movement from the input shaft to the output shaft.和一个螺旋形的齿轮连接一个或者多个直齿,用作主动轴和从动轴间动作的传动装置。
(整理)旋转编码开关

旋转编码开关(Rotary Encoder switch)这种旋转编码开关(Rotary Encoder switch),一个使用3脚的,后面一个使用5脚的,大家可能对这种玩意都不是很了解,但涉及到有调整的地方,这个玩意使用真是很爽,我弄了2个,研究了一下,供大家参考~5脚的ALPS:具有左转,右转,按下三个功能。
4、5脚是中间按下去的开关接线 1 2 3脚一般是中间2脚接地,1、3脚上拉电阻后,当左转、右转旋纽时,在1、3脚就有脉冲信号输出了。
着这是标准资料:在单片机编程时,左转和右转的判别是难点,用示波器观察这种开关左转和右转时两个输出脚的信号有个相位差,见下图:由此可见,如果输出1为高电平时,输出2出现一个高电平,这时开关就是向顺时针旋转; 当输出1 为高电平,输出2出现一个低电平,这时就一定是逆时针方向旋转.所以,在单片机编程时只需要判断当输出1为高电平时,输出2当时的状态就可以判断出是左旋转或是右旋转了。
还有另外一种3脚的,除了不带按钮开关外,和上面是一样的使用。
参考:#include "reg51.h"#define uint unsigned intsbit CodingsWitch_A=P1_1;sbit CodingsWitch_B=P1_2;uint CodingsWitchPolling()//{static Uchar Aold,Bold; //定义了两个变量用来储蓄上一次调用此方法是编码开关两引脚的电平static Uchar st; //定义了一个变量用来储蓄以前是否出现了两个引脚都为高电平的状态uint tmp = 0;if(CodingsWitch_A&&CodingsWitch_B)st = 1; //if(st) //如果st为1执行下面的步骤 {if(CodingsWitch_A==0&&CodingsWitch_B==0) //如果当前编码开关的两个引脚都为底电平执行下面的步骤{if(Bold) //为高说明编码开关在向加大的方向转{st = 0;tmp++; //}if(Aold) //为高说明编码开关在向减小的方向转{st = 0;tmp--; //设返回值}}}Aold = CodingsWitch_A; //Bold = CodingsWitch_B; //储return tmp; //}//编码器计数程序void encoder_cnt(void){uchar temp;temp = PIND; //取端口D管脚信号couch_clr = (temp & 0x08); //取编码器清零信号if(couch_clr != false) //有编码器清零信号{couch_num = 0; //水平床码清零}else{if(encoder_cnt_en == false) //编码器计数模块没有启动{pr_couch_ba = temp &0x03; //取编码器A、B相电平信号}else{couch_ba = temp & 0x03; //取编码器A、B相电平信号if(pr_couch_ba == 0x00){if(co uch_ba == 0x01){couch_num++; //水平床码加1}elseif(couch_ba == 0x10){couch_num--; //水平床码减1}}else if(pr_couch_ba ==0x01){if(co uch_ba == 0x11){couch_num++; //水平床码加1}elseif(couch_ba == 0x00){ couch_num--; //水平床码减1}}else if(pr_couch_ba == 0x10){if(co uch_ba == 0x00){couch_num++; //水平床码加1}else if(couch_ba == 0x11){couch_num--; //水平床码减1}}else if(pr_couch_ba == 0x11){if(co uch_ba == 0x10){couch_num++; //水平床码加1}else if(couch_ba == 0x01){couch_num--; //水平床码减1}}}pr_couch_ba = couch_ba;}}编码器及其计数模块原理飘扬的旋转编码器的检测程序(MCS51)//旋转编码器检测程序,A/B信号分别接在了INT0和INT1上//程序作者:BG4UVR//2005年1月15用KEIL编译、硬件测试通过//注意:编码器的信号,程序未做消抖处理。
旋转编码器工作方式图解

旋转编码器旋转编码器是由光栅盘(又叫分度码盘)和光电检测装置(又叫接收器)组成。
光栅盘是在一定直径的圆板上等分地开通若干个长方形孔。
由于光栅盘与电机同轴,电机旋转时,光栅盘与电机同速旋转,发光二极管垂直照射光栅盘,把光栅盘图像投射到由光敏元件构成的光电检测装置(接收器)上,光栅盘转动所产生的光变化经转换后以相应的脉冲信号的变化输出。
编码器码盘的材料有玻璃、金属、塑料等。
玻璃码盘是在玻璃上沉积很薄的刻线,其热稳定性好,精度高。
金属码盘直接以通和不通刻线,不易碎,但由于金属有一定的厚度,精度就有限制,其热稳定性也比玻璃的差一个数量级。
塑料码盘成本低廉,但精度、热稳定性、寿命均要差一些。
编码器以信号原理来分,有增量式编码器(SPC)和绝对式编码器(APC),顾名思义,绝对式编码器可以记录编码器在一个绝对坐标系上的位置,而增量式编码器可以输出编码器从预定义的起始位置发生的增量变化。
增量式编码器需要使用额外的电子设备(通常是PLC、计数器或变频器)以进行脉冲计数,并将脉冲数据转换为速度或运动数据,而绝对式编码器可产生能够识别绝对位置的数字信号。
综上所述,增量式编码器通常更适用于低性能的简单应用,而绝对式编码器则是更为复杂的关键应用的最佳选择--这些应用具有更高的速度和位置控制要求。
输出类型取决于具体应用。
一:增量式旋转编码器工作原理增量式旋转编码器通过两个光敏接收管来转化角度码盘的时序和相位关系,得到角度码盘角度位移量的增加(正方向)或减少(负方向)。
增量式旋转编码器的工作原理如下图所示。
图中A、B两点的间距为S2,分别对应两个光敏接收管,角度码盘的光栅间距分别为S0和S1。
当角度码盘匀速转动时,可知输出波形图中的S0:S1:S2比值与实际图的S0:S1:S2比值相同,同理,当角度码盘变速转动时,输出波形图中的S0:S1:S2比值与实际图的S0:S1:S2比值仍相同。
通过输出波形图可知每个运动周期的时序为:我们把当前的A、B输出值保存起来,与下一个到来的A、B输出值做比较,就可以得出角度码盘转动的方向,如果光栅格S0等于S1时,也就是S0和S1弧度夹角相同,且S2等于S0的1/2,那么可得到此次角度码盘运动位移角度为S0弧度夹角的1/2,再除以所用的时间,就得到此次角度码盘运动的角速度。
旋转编码器使用方法
旋转编码器使用方法使用方法一:修改驱动程序旋转编码器属于精密仪器,在其使用过程中需通过程序发出指令,才能起到特定的作用,而根据不同环境下的需求,需要设定不同的驱动程序,所以说决定编码器使用效果怎么样,修改合适的驱动程序是非常重要的。
通常情况下只要直接修改reg文件,同时注册一个表文件,利用添加的方式改写动态链接,在确定动态链接已经修改好的情况下,需要将其添加到内核中;使用方法二:硬件接口连接驱动程序修改好之后,下面就是硬件接口连接操作,在连接中,通常有A和B两个集电极输出接口,为确保线路衔接性,需要在3.3V 上的电阻上进行操作,将A和B两个接口分别插到CPU上。
在硬件接口连接成功之后,以防万一,须做好测试工作检查电压输出端高低压数值是否正确,比如在按下按钮之后,如果P2端口输出值是高电平的话,说明连接正确;使用方法三:流接口驱动程序的编写流接口驱动程序的编写是为下面的中断服务程序做准备,具体编写步骤是创建线程实现变量值的记录,同时记录在线路中断的情况下,各端口的数值是否还是高电平;使用方法四:中断服务程序的编写终端服务程序编写主要是起到编码器线路保护作用。
通过对CPU 的I/O接口进行初始化工作,在此基础上编写中断服务程序。
旋转编码器使用说明1. 确定检测对象,测速、测距、测角位移还是计数等。
2.仅用于动态过程还是包含静态位置或状态。
3.确认是择增量型旋转编码器还是绝对型旋转编码器。
4.确定对象的运动范围。
5.确认是选择单圈绝对型旋转编码器还是多圈绝对型旋转编码器。
6.确定对象的最高速度或频率。
7.确定对象的精度要求。
8.确定选择旋转编码器的应用参数。
9. 使用环境,注意旋转编码器的接口方式和保护等级。
旋转编码器(音量旋钮)原理、AD接键原理教材

编码器内部的工作原理
此接口为编码器按下 的检测脚,软件通过 检测它的电平变化来 判断是否按下
编码器的内部构造其实 就是3个开关
下图为实物编码器内部 构造图
3.软件处理的逻辑通过编码器输出波形图可知每个运动周期 的时序
顺时针运动 逆时针运动
AB
AB
11
11
01
10
00
00
10
01
(1)MCU通过判断A,B输出的两个状态,就可以轻易的得出角度码盘的运动 方向。
(2)当编码器按下时,编码器上的KEY脚为低电平(常态为高电平), MCU判断其管脚被拉低来做出它相应的动作。 (3)我司大屏机的编码器硬件上A、B两端口是接在一起,分别串了10K和 20K电阻,MCU通过识别其不同的电压值变化还判断编码器旋转的方向。
பைடு நூலகம்
以下为编码器顺时针和逆时针旋转输出的波形图:
4.编码器在使用时需注意的事项 (1)选用编码器时要注意以下几点: 编码器的空间大小、柄长、切槽深度、总高度、封装类型等 (2)增量型旋转编码器有分辨率的差异,使用每圈产生的脉冲数来计量,数目从 6到5400或更高,脉冲数越多,分辨率越高;这是选型的重要依据之一。
假设需采集S10按下的电压:
Ua=3.3*(R2+R3)/R1+R2+R3
2.电阻并联分压式 右图为电阻并联分压式原理图,其原理也是同电阻串联式, MCU通过采集a点的电压来识别按键的功能。一般这种做法 使用的较少,因为按键越多,就代表后面的电阻取值就要越 大。
3.软件如何处理AD数据 我们常见的汽车上的方向盘上的按键,大多数都是
4.AD采集数据的误差干扰及设计注意事项 其实在实际中不可能得到很准确的AD转换值,这是由于存在以 下几种误差: ◆对于同一个电压值,AD多次转换的结果不可能完全相同。
TT电子EN11系列旋转编码器说明书

Issue E 11/2023 Page 2
Rotary Encoder Model EN11 Series
Q Type
Shaft Types
H = 5mm L 15 20 25 30 P 7 7 11 14 T 6 6 10 12 M 2 224
H = 7mm L 15 20 25 30 P 7 7 11 14 T 6 6 10 12 M 1 124
10mA/5Vdc 10mA
300Vac/1mA, 1 minute 100M ohms at 250Vdc/ 1 mA
2.0ms max. 5.0ms max. 100 RPM max. 10mA/5Vdc 100 miliohms Continuous
General Note TT Electronics reserves the right to make changes in product specification without notice or liability. All information is subject to TT Electronics’ own data and is considered accurate at time of going to print.
Model Styles Available
Top adjust, with switch, threaded bushing Top adjust, without switch, threaded bushing Top adjust, with switch, plain bushing Top adjust, without switch, plain bushing Side adjust, with switch, threaded bushing Side adjust, without switch, threaded bushing Side adjust, with switch, plain bushing Side adjust, without switch, plain bushing
数字旋转编码开关的原理及使用方法

{
uchar x,y;
for(x=z;x>0;x--)
for(y=110;y>0;y--);
}
void display() //显示子程序
{
P0=table[count%10]; //个位
P27=0;
delay(10);
P27=1;
P0=table[count%100/10]; //十位
没有多余的再说了,直接附上代码:
#include <reg52.h>
#define uchar unsigned char
#define uint unsigned int
sbit BMA=P1^4;
sbit BMB=P1^5;
sbit BMC=P1^6;
sbit P27=P2^7;
sbit P26=P2^6;
sbit P25=P2^5;
uchar code table[]={0xC0,0xF9,0xA4,0xB0,0x99,0x92,0x82,0xF8,0x80,0x90};
uchar count=0;
uchar flag;
uchar Last_BMB_status;
uchar Current_BMB_status;
flag="1"; //标志位置为1说明编码开关被旋转了
}
if(flag==1)
{
flag="0"; //时刻要注意这一点!给标志位清零
if((Last_BMB_status==0)&&(Current_BMB_status==1)) //BMB上升沿表示正转
台達旋轉式編碼器使用說明说明书
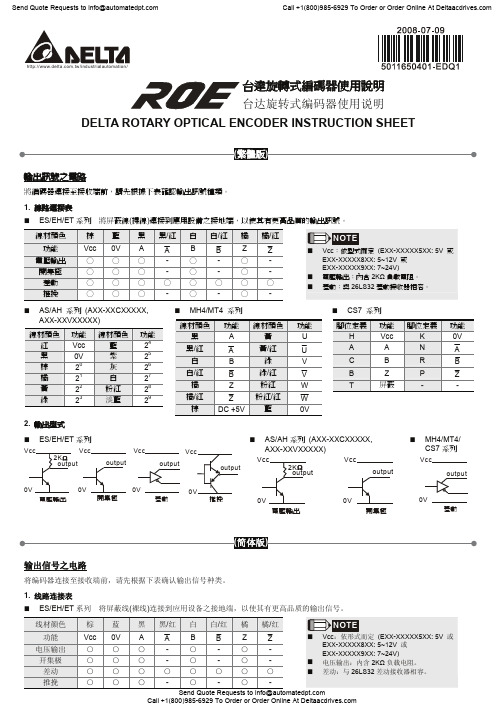
台達旋轉式編碼器使用說明台达旋转式编码器使用说明DELTA ROTARY OPTICAL ENCODER INSTRUCTION SHEET(繁體版)輸出訊號之電路將編碼器連接至接收端前,請先根據下表確認輸出訊號種類。
1.線路連接表ES/EH/ET 系列 將屏蔽線(裸線)連接到應用設備之接地端,以使其有更高品質的輸出訊號。
AS/AH 系列 (AXX-XXCXXXXX,AXX-XXVXXXXX)線材顏色功能線材顏色功能紅Vcc 藍24黑0V 紫25棕20灰26橘21白27黃22粉紅28綠23淡藍29MH4/MT4 系列CS7 系列2.輸出型式ES/EH/ET 系列Vcc0VoutputVcc0V0VVccoutput電壓輸出開集極差動推挽AS/AH 系列 (AXX-XXCXXXXX,AXX-XXVXXXXX)Vcc0Voutput電壓輸出開集極MH4/MT4/CS7系列Vcc0V差動(简体版)输出信号之电路将编码器连接至接收端前,请先根据下表确认输出信号种类。
1.线路连接表ES/EH/ET 系列 将屏蔽线(裸线)连接到应用设备之接地端,以使其有更高品质的输出信号。
AS/AH 系列 (AXX-XXCXXXXX,AXX-XXVXXXXX) 线材颜色 功能 线材颜色 功能红 Vcc 蓝 24 黑 0V 紫25 棕 20灰 26 橘 21白 27 黄 22粉红 28 绿 23淡蓝 29MH4/MT4 系列CS7 系列2. 输出形式 ES/EH/ET 系列Vcc0VoutputVcc0V0VVccoutput電壓輸出開集極差動推挽AS/AH 系列 (AXX-XXCXXXXX,AXX-XXVXXXXX)Vcc0Voutput電壓輸出開集極MH4/MT4/CS7系列Vcc0V差動(English Version)CIRCUIT OF OUTPUT SIGNALSBefore connecting the encoder wirings to the receiver, please identify the type of the output signal with the specification. 1. Connection Table ES/EH/ET SeriesConnect the shield wire (bare wire) with the grounding end of equipment for better performance.AS/AH Series (AXX-XXCXXXXX,AXX-XXVXXXXX) Wire ColorFunctionWire ColorFunction Red Vcc Blue 24Black 0V Purple 25 Brown 20Gray 26 Orange 21 White 27 Yellow 22 Pink28Green 23Light Blue29MH4/MT4 SeriesCS7 Series2. Output Circuit ES/EH/ET SeriesVcc0V outputVcc0V 0VVccoutputVoltage OutputOpen-Collector Line Driver Push-PullAS/AH Series (AXX-XXCXXXXX,AXX-XXVXXXXX)Vcc0VoutputVoltage OutputOpen-CollectorMH4/MT4/CS7SeriesVcc0VLine Driver***************************************。
旋转编码开关(Rotary Encoder switch)-使用说明及程序
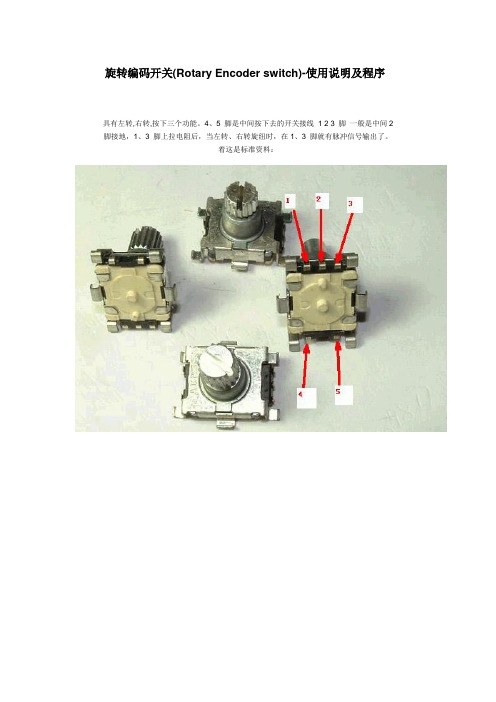
旋转编码开关(Rotary Encoder switch)-使用说明及程序具有左转,右转,按下三个功能。
4、5 脚是中间按下去的开关接线 1 2 3 脚一般是中间2 脚接地,1、3 脚上拉电阻后,当左转、右转旋纽时,在1、3 脚就有脉冲信号输出了。
着这是标准资料:在单片机编程时,左转和右转的判别是难点,用示波器观察这种开关左转和右转时两个输出脚的信号有个相位差,见下图:由此可见,如果输出1 为高电平时,输出2 出现一个高电平,这时开关就是向顺时针旋转; 当输出1 为高电平,输出2 出现一个低电平,这时就一定是逆时针方向旋转.所以,在单片机编程时只需要判断当输出1 为高电平时,输出2 当时的状态就可以判断出是左旋转或是右旋转了。
还有另外一种3 脚的,除了不带按钮开关外,和上面是一样的使用。
参考:#include "reg51.h"#define uint unsigned intsbit CodingsWitch_A=P1_1;sbit CodingsWitch_B=P1_2;uint CodingsWitchPolling()//{static Uchar Aold,Bold; //定义了两个变量用来储蓄上一次调用此方法是编码开关两引脚的电平static Uchar st; //定义了一个变量用来储蓄以前是否出现了两个引脚都为高电平的状态uint tmp = 0;if(CodingsWitch_A&&CodingsWitch_B)st = 1; //if(st) //如果st 为1 执行下面的步骤{if(CodingsWitch_A==0&&CodingsWitch_B==0) //如果当前编码开关的两个引脚都为底电平执行下面的步骤{if(Bold) //为高说明编码开关在向加大的方向转{st = 0;tmp++; //}if(Aold) //为高说明编码开关在向减小的方向转{st = 0;tmp--; //设返回值}}}Aold = CodingsWitch_A; //Bold = CodingsWitch_B; //储return tmp; //}//编码器计数程序void encoder_cnt(void){uchar temp;temp = PIND; //取端口D 管脚信号couch_clr = (temp & 0x08); //取编码器清零信号if(couch_clr != false) //有编码器清零信号{couch_num = 0; //水平床码清零}else{if(encoder_cnt_en == false) //编码器计数模块没有启动{pr_couch_ba = temp & 0x03; //取编码器A、B 相电平信号}else{couch_ba = temp & 0x03; //取编码器A、B 相电平信号if(pr_couch_ba == 0x00){if(couch_ba == 0x01){couch_num++; //水平床码加1}else if(couch_ba == 0x10){couch_num--; //水平床码减1}}else if(pr_couch_ba == 0x01){if(couch_ba == 0x11){couch_num++; //水平床码加1}else if(couch_ba == 0x00){couch_num--; //水平床码减1}}else if(pr_couch_ba == 0x10){if(couch_ba == 0x00){couch_num++; //水平床码加1}else if(couch_ba == 0x11){couch_num--; //水平床码减1}}else if(pr_couch_ba == 0x11){if(couch_ba == 0x10){couch_num++; //水平床码加1}else if(couch_ba == 0x01){couch_num--; //水平床码减1}}}pr_couch_ba = couch_ba;}}编码器及其计数模块原理飘扬的旋转编码器的检测程序(MCS51)//旋转编码器检测程序,A/B信号分别接在了INT0和INT1上//程序作者:BG4UVR//2005 年1 月15 用KEIL编译、硬件测试通过//注意:编码器的信号,程序未做消抖处理。
ROTARYENCOERCONNECTIONS编码器型号说明

ROTARYENCOERCONNECTIONS编码器型号说明随着自动化设备的普及,编码器在机械生产中起到了很大的作用,在机电及自动化系统中,编码器在自动控制及自动测量等领域得到了广泛的应用,编码器以其高精度、高分辨率和高可靠性而被广泛用于各种自动化领域,测量电机的转速、设备运行位置和行程的检测等都是编码器的实际应用所涵盖的接下来润鑫编码器带大家全面了解一下型号怎么看。
以网上搜索的这款编码器型号为例来详细说明型号详解A:RE是编码器大的代号,厂家的命名规则不同前面代号也有所不同林积为取RE则是旋转编码器rotaryencoder英文首字母。
B:外观关键尺寸大小11则为某一个面的尺寸11mm左右。
C:03是薄型底座带开关产品,还有如00厚型底座不带开关、01厚型底座带开关产品等等。
D:轴套的形状代号,l则为3.5mm长度无螺纹轴套,还有7mm、5mm、10mm有无螺纹等等这些信息。
E∶支架代号,C支架代表安装方式为插件方式,支架脚的宽度为2.0mm支架脚总跨度为13.2mm,还有宽2.5mm跨度12.9跟贴片支架脚等等。
F:代表底盖有无定位柱,1代表无柱子。
还有2代表有两个定位柱、3代表有两个大的定位柱等等。
G:端子脚类型,HO1代表立式插件脚。
还有V01跟其他参数如端子脚数量,端子脚形状,端子脚跨度。
H:内部流水号,代表的信息在后面括号里体现。
I:脉冲数量,代表的是产品的脉冲信息,不同类型的编码器脉冲数量有不同如:9脉冲、12脉冲、15脉冲、20脉冲、24脉冲等等。
J::脉冲输出的方向,代表脉冲是通过正旋转还是反旋转输出,P代表顺时针旋转,T代表逆时针旋转。
K:定位数量,代表这旋转一周有多少个定位点也就是档位感,这里的定位数量跟脉冲数量必须成1:1或者2:1的比例出现。
L:轴芯形状,A代表D字形半轴,K代表梅花齿拉花轴等等。
M:代表轴芯材质,A代表铝合金材,B代表锌合金材,C代表铜材质,D代表不锈钢材质,L代表塑胶材质等等。
S-8000旋转开关产品说明说明书
421
4 – 0.60.1 t = 0.15
2.54 2.54
5.9 9.5
C 2.54
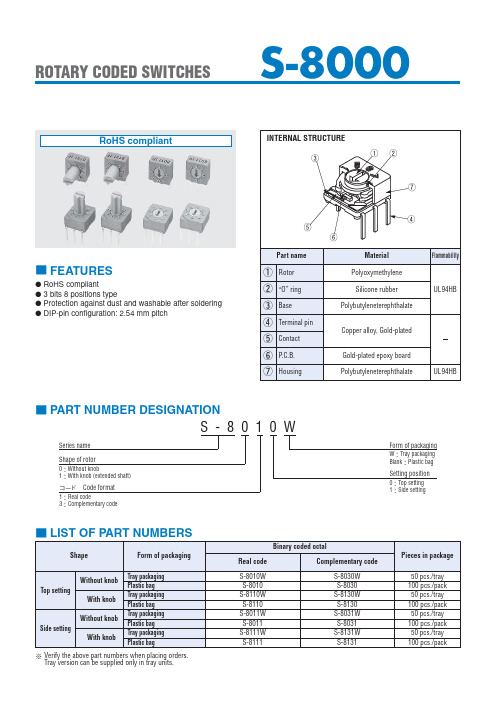
S-8000
ROTARY CODED SWITCHES
˙ TERMINAL CONNECTION / P.C.B. THROUGH HOLE DIMENSIONS
Top setting
Side setting
Sealing Net weight
Washable by “O” ring ˞ Please refer to page 150,151
Approx. 0.27 g (S-8010, S-8030) Approx. 0.34 g (S-8110, S-8130) Approx. 0.33 g (S-8011, S-8031) Approx. 0.40 g (S-8111, S-8131)
˙ ELECTRICAL CHARACTERISTICS
Contact rating Non-switching Switching Minimum
Contact resistance
Insulation resistance
Dielectric strength
DC50 V 100 mA DC5 V 100 mA DC20 mV 1 Ж A 100 m Њ maximum
ROTARY CODED SWITCHES
S-8000
RoHS compliant
˙ FEATURES
O3P)4DPNQMJBOU OCJUTQPTJUJPOTUZQF O1SPUFDUJPOBHBJOTUEVTUBOEXBTIBCMFBGUFSTPMEFSJOH O%*1QJODPOGJHVSBUJPONNQJUDI
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
旋转编码开关(Rotary Encoder switch)-使用说明及程序
具有左转,右转,按下三个功能。
4、5 脚是中间按下去的开关接线 1 2 3 脚一般是中间2 脚接地,1、3 脚上拉电阻后,当左转、右转旋纽时,在1、3 脚就有脉冲信号输出了。
着这是标准资料:
在单片机编程时,左转和右转的判别是难点,用示波器观察这种开关左转和右转时两个输出
脚的信号有个相位差,见下图:
由此可见,如果输出1 为高电平时,输出2 出现一个高电平,这时开关就是向顺时针旋转; 当输出1 为高电平,输出2 出现一个低电平,这时就一定是逆时针方向旋转.
所以,在单片机编程时只需要判断当输出1 为高电平时,输出2 当时的状态就可以判断出是左
旋转或是右旋转了。
还有另外一种3 脚的,除了不带按钮开关外,和上面是一样的使用。
参考:
#include "reg51.h"
#define uint unsigned int
sbit CodingsWitch_A=P1_1;
sbit CodingsWitch_B=P1_2;
uint CodingsWitchPolling()//
{
static Uchar Aold,Bold; //定义了两个变量用来储蓄上一次调用此方法是编码开关两引
脚的电平
static Uchar st; //定义了一个变量用来储蓄以前是否出现了两个引脚都为高电
平的状态
uint tmp = 0;
if(CodingsWitch_A&&CodingsWitch_B)
st = 1; //
if(st) //如果st 为1 执行下面的步骤
{
if(CodingsWitch_A==0&&CodingsWitch_B==0) //如果当前编码开关的两个引脚
都为底电平执行下面的步骤
{
if(Bold) //为高说明编码开关在向加大的方向转
{
st = 0;
tmp++; //
}
if(Aold) //为高说明编码开关在向减小的方向转
{
st = 0;
tmp--; //设返回值
}
}
}
Aold = CodingsWitch_A; //
Bold = CodingsWitch_B; //储
return tmp; //
}
//编码器计数程序
void encoder_cnt(void)
{
uchar temp;
temp = PIND; //取端口D 管脚信号
couch_clr = (temp & 0x08); //取编码器清零信号if(couch_clr != false) //有编码器清零信号
{
couch_num = 0; //水平床码清零
}
else
{
if(encoder_cnt_en == false) //编码器计数模块没有启动
{
pr_couch_ba = temp & 0x03; //取编码器A、B 相电平信号
}
else
{
couch_ba = temp & 0x03; //取编码器A、B 相电平信号
if(pr_couch_ba == 0x00)
{
if(couch_ba == 0x01)
{
couch_num++; //水平床码加1
}
else if(couch_ba == 0x10)
{
couch_num--; //水平床码减1
}
}
else if(pr_couch_ba == 0x01)
{
if(couch_ba == 0x11)
{
couch_num++; //水平床码加1
}
else if(couch_ba == 0x00)
{
couch_num--; //水平床码减1
}
}
else if(pr_couch_ba == 0x10)
{
if(couch_ba == 0x00)
{
couch_num++; //水平床码加1
}
else if(couch_ba == 0x11)
{
couch_num--; //水平床码减1
}
}
else if(pr_couch_ba == 0x11)
{
if(couch_ba == 0x10)
{
couch_num++; //水平床码加1
}
else if(couch_ba == 0x01)
{
couch_num--; //水平床码减1
}
}
}
pr_couch_ba = couch_ba;
}
}
编码器及其计数模块原理
飘扬的旋转编码器的检测程序(MCS51)
//旋转编码器检测程序,A/B信号分别接在了INT0和INT1上
//程序作者:BG4UVR
//2005 年1 月15 用KEIL编译、硬件测试通过
//注意:编码器的信号,程序未做消抖处理。
测试中,A/B信号上各//接了一只104的瓷片电容,工作很正常。
如果不接电容,请自行编
//写信号消抖程序。
#include <at89x51.h>
sbit led="0xB1";//有一只LED接在了RXD 引脚上,用来指示正反转;
main()
{
EA=1; //总中断允许
EX0=1; //外部中断0允许
IT0=1; //外部中断0为边沿触发方式
while(1);;
}
/*********************
编码器中断函数
入口:无
出口:无
*********************/
void encoder(void) interrupt 0 { //外部中断0
if (INT1){
led=1;
}else{
led=0;
}
}
whimsy 的AVR 程序
//外部中断0,用于编码开关解码,解码图: A 接中断脚(AVR 的PD2),以此为基准,B 用来
判断方向(连到AVR 的PA1), C 接地
//A -|
// | -----|__________|----------|____________
//C -|
//
//B -|
// | ----------|__________|----------|____________
//C -|
// CW ===>>> ROTATION
//外部中断设置(ISC01=0,ISC00=1): INT0 引脚上任意的逻辑电平变化都将引发中断
#pragma interrupt_handler int0_isr:2
void int0_isr(void)
{
//external interupt on INT0
GICR=0; //禁止外部中断
if ((PIND & 0x04)==0) //先判断是高电平产生的中断还是低点平的中断
if ((PINA & 0x02)==0) //再判断B 线上的电平
{
keycounter--;
keydirection="0";
}
else
{
keycounter++;
keydirection="1";
}
else
if ((PINA & 0x02)==0)
{
keycounter++; keydirection="1";
}
else
{
keycounter--;
keydirection=0;
}
GICR=0x40;
}。