半实物仿真系统产品安装误差对仿真精度影响研究(精)
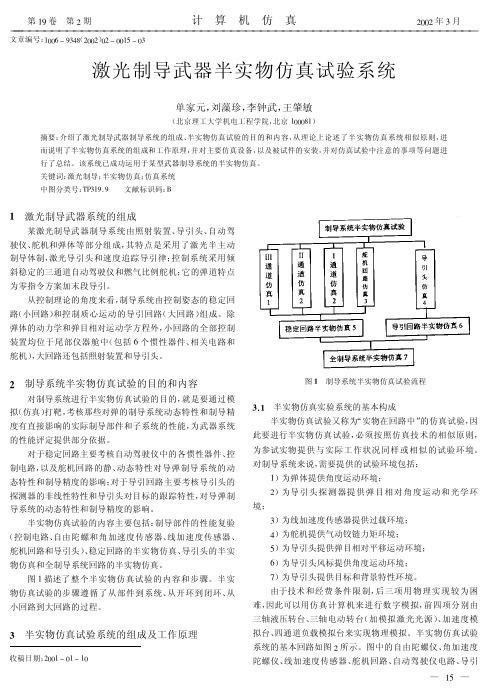
激光制导武器半实物仿真试验系统
$ 总结
一个完整的半实物仿真试验由参试实物、试验系统和仿 真软件三大部分组成。在参试硬件具备的条件下,主要是仿 真模型的建立、仿真软件的编制和调试,及试验设备的调试 和试验系统的联试。在考虑仿真阶段划分时,遵循了从简到 难、从少到 多 分 阶 段 进 行 的 原 则,使 试 验 的 成 功 把 握 更 大。 其中制导回路、稳定回路的安排又可按照设备的准备情况和
# 半实物仿真试验系统的组成及工作原理
收稿日期:!""# $ "# $ #"
图 ! 制导系统半实物仿真试验流程
#$! 半实物仿真实验系统的基本构成 半实物仿真试验又称为“实物在回路中”的仿真试验,因
此要进行半实物仿真试验,必须按照仿真技术的相似原则, 为参试实物 提 供 与 实 际 工 作 状 况 同 样 或 相 似 的 试 验 环 境。 对制导系统来说,需要提供的试验环境包括:
# 被试件的安装和调整
被试件的安装与其在弹上的安装方式、弹体方程解算时 的相关坐标 系 的 定 义,以 及 仿 真 设 备 的 坐 标 系 定 义 密 切 相 关。这里遵循的原则是,使被试件在仿真设备上敏感到的输 出信号与在弹上敏感的信号符号一致,因此可以直接将所有 被试件的信号相互连接起来,进行除弹体动力学和运动学以 外的全实物仿 真。为 此,驱 动 仿 真 设 备 的 信 号,需 要 根 据 坐 标系的定义作相应的变换。 #"’ 自动驾驶仪及陀螺组件
雷达寻的制导半实物仿真误差研究
KE YW ORDS: d a o n ;C mp st ia c Ra i h m g r i o o i g d e;Had a e—i —t e—l p s la o eu n rw r n h o i mu t n;Ero ay i ;Mah i rr a l s n s t—
e t d e mai mo l c
l 引言
雷达寻的制 导的原理 是利用导 引头对其发 射 出的电磁 波经 目标反射后进行 探测处 理 , 从而 实现对 目标 的搜索 、 截 获及跟踪 , 并将 飞行器 引向 目标 。
建立数学模型 。最后 通过某 型号仿 真试验 对该模 型进 行验
进一步推导出此类雷达仿真系统具有一般意义的仿真误差模型 。最后通过 型号半实物仿 真试验 对仿真系统 的仿 真精度进
行验证。仿真试验表 明, 该半实物仿真系统 的仿真精度满足控制系统半实物仿真试验的要求。 关键词 : 雷达 寻的; 复合制导 ; 半实物仿真; 误差分析 ; 数学模型 中图分类号:P 1 .2 T 3 15 文献标识码 : B
ts e ut sc r c a d C me t h r cso q ie n o t ec n r l y t m a d a e—i h e—lo i l ain e t s i o r t r l e n a n e t e p e i n r u rme t h o t se h r w r i e f o s n—t o p smu t o
( eat n o u macC n o, oeeo uo tn e i nvri f eoat s D pr t f t t ot l C l g f t i ,B in U i syo rnui me A o i r l A m o a jg e t A c
半实物仿真系统VV_A研究
Feb 2011 V ol 29,N o.1航 天 控 制A erospace Contro l半实物仿真系统VV&A研究*高江林1 吴晓燕1李勇君1 邱朝彬21.空军工程大学导弹学院,陕西三原7138002.中国人民解放军93575部队,河北承德068250摘 要 半实物仿真系统因其具有的提高系统研制质量、缩短研制周期、节约研制经费等优点成为仿真领域研究的重要方向,对其开展VV&A研究则是保证仿真结果可用和可信的有效途径,为了更好开展半实物仿真及其VV&A工作,论文重点分析了半实物仿真系统的主要特点,提出了开展VV&A应遵循的原则,并有针对性的设计了其VV&A过程,最后以实例分析了兼顾工程应用和效率的半实物仿真系统VV&A实现,所得出的结论对复杂仿真系统VV&A有一定借鉴意义。
关键词 半实物仿真系统;VV&A;导弹训练模拟器中图分类号:TP391.9 文献标识码:A文章编号:1006 3242(2011)01 0067 05The R esearch on the VV&A of H ard ware i n the Loop Si m ulati on Syste mGAO Jiang li n1 WU X iaoyan1 LI Yong j u n1 Q I U Chaob i n21.The M issile I nstitute,A ir Force Eng ineeri n g Un i v ersity,Shanx i713800,Ch i n a2.PLA Un it93575,H ebe i068250,Ch i n aAbst ract Due to the advantages of i m proving the quality of syste m developm en t,s hortening the vali d ation ter m and savi n g costs,the har dw are in t h e loop si m ulation s y ste m has beco m e an i m p ortant research d irec tion i n the si m ulation do m ain,and t h e research of VV&A base d on hardw are i n the loop si m ulation s y ste m is an usefulm ethod to ens ure credibility and usabilit y.The ma i n characteristics o f har dware in t h e loo p are analyzed in detail and the VV&A princi p le is pro p osed as w ell.The VV&A process is designed particu l a rly and finall y the case study is i m p le m ented to analyze the reali z ation of s y ste m w hich co m bines the engineering app lica tion w ith the efficiency.The conclusion can serve as a reference for the VV&A of co mp licated si m u la tion s yste m.K ey w ords H ar dware in the loo p si m ulation s y ste m;VV&A;M issile training si m ulator*陕西省自然科学基础研究计划项目资助(2007F40);总装备部 十一五 武器装备预先研究项目(513040104)收稿日期:2010 06 25作者简介:高江林(1984-),男,河南社旗人,硕士研究生,研究方向为导航、制导与控制;吴晓燕(1957-),女,陕西人,博士,教授,研究方向为导航、制导与控制及建模与仿真VV&A;李勇君(1986-),男,山东人,硕士研究生,研究方向为导航、制导与控制;邱朝彬(1973-),男,四川人,工程师,研究方向为军事装备学。
空对地精确制导半实物仿真系统
空对地精确制导半实物仿真系统谷峰冯禹(空军第二航空学院三系空对地精确制导武器实验室 长春 130022 )摘 要:对导弹系统的核心部件——制导系统进行半实物仿真是导弹系统研制中最经济和有效的手段之一。
本文依据空对地精确制导武器实验室建设实例,论述了图像制导系统半实物仿真系统的组成、功用,并给出了其原理框图。
对其中几个关键技术:运动学特性的仿真建模、目标背景与对抗特性的生成、计算机软件和接口、模型校正与故障检测等技术的实现进行了深入地分析,并介绍了其具体的设计方案和实施步骤。
关键词:半实物仿真 制导仿真系统 图像捕控指令制导 图像制导系统 柔性仿真引言系统仿真技术是随着计算机和现代测试技术的迅速发展而成长起来的一门综合性应用技术学科。
已经成为系统工程中一项科学的方法和有力的工具。
尤其是在航空航天领域,在各种飞行器的研制、鉴定、和定型的整个过程都必须全面地应用先进的仿真技术。
以此来检验系统软硬件的技术性能和战术技术指标是否能够满足预定的作战任务的需要。
发现和解决使用过程中可能出现的问题,协助部队进行训练和作战使用、攻防对策的研究,研究武器系统对付新的敌情和作战背景的能力以及对武器系统进行技术改进等。
随着作战要求的不断提高和科学技术的迅速发展,制导武器日趋复杂,研制的费用和周期也不断增长。
其系统性能的优劣原则上应用接近于实战使用条件下的靶场试验来决定,但是制导武器的飞行试验是一次性的,而且准备周期长、协同单位多、试验成本高。
因此,仿真试验是制导系统研制中最经济和最有效的技术手段之一。
在未来的防区外精确打击中巡航导弹将发挥无可替代的作用。
对于巡航导弹来讲,末制导是核心、是灵魂。
末制导的精度将直接影响巡航导弹的攻击效能,是巡航导弹能否投入战斗使用的关键技术。
同时,由于巡航导弹的攻击对象是地面目标,背景噪声明显,受气候影响明显,目标的识别和跟踪都比较困难,采用全数字仿真无法满足实际需要,因此,对巡航导弹的末制导技术和方案进行实验室条件下的半实物仿真和实物制导系统验证是非常必要的,它不仅可以大大节省导弹的设计成本和设计周期,同时在实验室条件下可以比较真实地多次再现目标、环境以及整个攻击过程,及时发现在系统软、硬件设计上存在的问题和不足,并随时改进,从而大大提高末制导的跟踪精度和抗干扰能力。
半实物仿真
ADRTS的硬件体系结构
VMEbus
User Interface Processor
Compute Engine Processor
Intelligent/ nonintelligent I/O
Target Compute Engine
Host TCP/IP
Physical Hardware
ADRTS采用主辅机结构,通过用户接口处理器 UIP(User Interface Processor)和主机相互通讯, 自身有计算引擎处理器单元CE(Compute Engine Processor)来完成仿真和其他科学计算。
PLC,MultibusI,SELbus,Qbus, Sbus,TU RBOchannel
MS-DOS, Windows NT, SUN OS,Solaris,System V, HP UX,HP RT, SGI IRIX,DEC UNIX,OPEN
VMS, VxWorks
Broadcast Memory 1Gbit/s 40MB/s 星(HUB) 多膜光纤
Maximum Number of Nodes
Topology Error Handling Deterministic
Cabling
Reflective Memory
2.1G 174 M/s
10 Km 256
Ring Yes YYeess Fiber
1000BaseX Gigabit Ethernet
第七章 半实物仿真
主要内容
7.1半实物仿真的概念 7.2半实物仿真的支撑技术 7.3半实物仿真的工程实例
7.1.1半实物仿真的概念
半实物仿真 ,又称为硬件在回路仿真(hardwarein-loop simulation ),是将实物 (控制器)与在计算 机上实现的控制对象的仿真模型联接在一起进行 试验的技术。在这种试验中,控制器的动态特性、 静态特性和非线性因素等都能真实地反映出来, 因此它是一种更接近实际的仿真试验技术。这种 仿真技术可用于修改控制器设计(即在控制器尚 未安装到真实系统中之前,通过半实物仿真来验 证控制器的设计性能,若系统性能指标不满足设 计要求,则可调整控制器的参数,或修改控制器 的设计),同时也广泛用于产品的修改定型、产 品改型和出厂检验等方面。
半实物仿真结果研究
某型导弹控制系统半实物仿真结果研究马培蓓张勐李伟 吴媛媛(海军航空工程学院研究生队烟台 264001)摘要:半实物仿真是工程领域内一种应用较为广泛的仿真技术首先介绍了某型导弹半实物仿真系统的作用和组成并给出了半实物仿真的设计框图论述了半实物仿真中发现的问题最后给出了陀螺信号及二级舵舵位置反馈信号的半实物仿真与数字仿真结果的对比曲线图说明此次半实物仿真结果是比较可靠的就是在试验的条件下实物工作环境模拟设备以及导弹的运动学组成一个可运行的系统可重复运行本文以dSPACE仿真计算机为核心并对半实物仿真结果进行了分析说明此次半实物仿真是可靠的1半实物仿真系统的作用 半实物仿真主要是研究制导控制系统用数字仿真解决不了的问题更好地发挥数字仿真的作用Ø 研究制导控制系统某些环节的特性对系统的影响及改进措施控制系统中的某些环节的特性不易用数学表达式加以描述这些都可通过半实物仿真来进行研究尽可能地把制导控制系统的硬件设备接入到仿真回路中在条件许可的情况下利用现代的仿真技术使目标环境的仿真逐步接近作战过程的实际环境Ø 校准制导控制系统的数学模型半实物仿真的试验目标无非是认识和性能两种性质的检验系统各部分的协调性和匹配性硬件功能的正确性和系统性能是否满足技术指标要求等三轴飞行模拟转台陀螺组合4个磁粉离合器电动舵机综合电源组成末制导雷达空气动力而将自动驾驶仪(无线电高度表除外)接入仿真系统的控制回路实现该部分的半实物仿真l 对仿真计算机的要求l 舵机的仿真系统必须能够实时地实现控制系统的回路闭合从而可以在一个完全闭合的回路中实时地运行导弹控制系统的飞行方案与控制方案导弹的半实物仿真统从功能上应能完全实现导弹所具备的功能各组成部分除了可以模拟导弹的数学模型外这样可使我们逐渐完成整个系统的开发最终可实现全系统的联调控制部分的数学模型去掉由实物所代替 图1 某型导弹半实物仿真设计框图3 半实物仿真中发现的问题 3.1建立准确的仿真模型数学模型是仿真的基础和依据仿真就没有意义了存贮的各个环节中也不可避免的出现这样和那样的问题角度和弧度变换不统一漏写以及数据错误等这需要我们在半实物仿真试验中逐一发现Ø 必须对俯仰装订信号Ø 二次降高的高度修正我们发现在二次降高指令发出之后通过测试检查发现导弹二次降高的高度无法达到7米另外时间常数比较精确的值应为4.3秒如果按照数学模型所示电路时间常数设为0.5SÔÚ实际的仿真试验中则在G指令发出之后为此修正了俯仰程序放大器的数学模型如图2所示图2 修正后俯仰程序放大器仿真模型Ø 舵机回路数学模型的修正我们发现如果按照以前舵机的数学模型来进行仿真超调大不仅舵位置反馈信号不正确与实际情况不符[38]ÎÒÃǶԶæ»úµÄÊýѧģÐͽøÐÐÁËÐÞÕý·ÂÕæ½á¹ûÓëʵ¼Ê½á¹ûÍêÈ«Ïà·û图3 原舵机仿真模型得到的结果 图4 修正舵机模型得到的结果图3.2仿真时需注意的事项1) 在半实物仿真开始前使转台的中框预先转动150¶ø´Ëʱ¸©ÑöÍÓÂÝ´¦ÓÚµçËø¶¨×´Ì¬ÔÚµ¼µ¯·¢Éä˲¼äÏà¶ÔÓÚˮƽ»ù×¼¶øÑÔÒò´Ë2) 考虑到电压匹配与驱动的问题因此在适配器上将采集回来的电压缩小1/2送到DA接口考虑到仿真机送出的电压信号的范围及电压必须在适配器上加入放大2倍的电压3) 必须注意到陀螺信号及舵位置反馈信号都是以电压信号的形式采集回来的必须通过一定的转换关系使其转换为角度的形式转台控制信号必须转换为电压信号的形式才能接到DA接口半实物仿真试验中地线的种类繁多仿真机地实物地电源地等由于仿真系统的各仿真设备和参试部件相距甚远弱信号传输存在严重的噪声干扰和信号衰减问题严重时使系统不能正常工作危及被试设备的安全在建设半实物仿真系统的过程中铺设系统的地线可以有效的解决信号传输中的噪声干扰问题千万不可忽视使仿真结果面目全非信号之间的传递超过5米以上者否则同样产生错误的结果其中虚线为数字仿真结果横坐标为时间秒(s),纵坐标为度(0)ψ--航向角图5 ϑ对比仿真曲线图 图6 ψ对比仿真曲线图图7 γ对比仿真曲线图 图8二级一舵对比仿真曲线图图9 二级二舵对比仿真曲线图 图10 二级三舵对比仿真曲线图图11二级四舵对比仿真曲线图从以上的数字仿真结果与半实物仿真结果的比较来看说明本次仿真研究提供的驾驶仪实物数学模型是比较准确的5结束语 随着科学技术的飞速发展和人们对其认识的不断深入硬件水平将得到进一步的发展仿真性能及可靠性不断提高1) 仿真建模水平不断提高系统仿真能否达到预期的效果数学模型将起到关键的作用2) 仿真计算机软使仿真更为智能3) 环境模拟设备将向空间集成化试验多功能化方向发展并将进一步拓宽其应用领域宇航出版社 1998.8 90-1112 钱杏芳主编 导弹飞行力学[M] 北京清华大学出版社 2002.10 339-343 354-356 4张志涌 精通MATLAB6.5版[M] 北京清华大学出版社 2002.4 6 dSPACE。
仿真设备对验模精度的影响
者频率相差不大时, 就会对验模结果产生姿态转台、 舵机负载
模拟 器 、 引头转 台 、 真计 算机 、 时 网络等 。 导 仿 实 以下
具体分析这些设备 :
的影响。 ()舵机 负载 模拟 器 用 来实 时 产生 飞行过 程 3 中作用在 飞行 器舵机 上 的铰链 力 矩 。在 此要 区分 2
和新 的动 态过 程 。 不难看 出 , 目标 模 拟器动态 指标 在
一
虽然符合 , 由于数据点 之间偏差太大 , 但 验模不通
过 ; 对 比的 2组 数 据 之 间 明显 有 模 型没 有 描 述 的 ② 模 态 和延 迟 ; ③采 用 1次 试 验 中所 获 得 的不 同数据 进行 比较 时会获 得不 同 的结论 。这 些研 究 中表现 出
要 原 因之 一是 过程 中存 在 未建模 的动 态过程 。讨论 了典 型 的飞行 器半 实物仿 真 系统 中的设备及 其 未建模 因素 , 建立 了相应 的 数 学模 型 。 出了 1个 考虑 这些 未建模动 态过 程 的 系统仿真 数 学验证 模 提 型 。仿 真结果 说 明 , 未建模 动 态对仿 真模 型验证 的结果 有较 大影响 。
模 精度 的影 响就越 大 。 个角运 动 。 由于飞 行 器 的俯 仰 、 滚动 和偏航 角等是验
精度和置信度的质 疑, 并使得花费巨额经费建立起
来 的半 实物仿 真 系统 或数学 模 型名 正言顺 地取 代实
物实 验发挥作 用 。
模 直接对 比的数 据 , 因而 是 影 响验 模 精度 的 主要 因
来 的共 性 问题或 现 象 说 明 , 在仿 真 系 统模 型 验 证领
定 的情 况下 , 描述 的 目标 动 态性 能越高 , 所 则对验
射频制导仿真系统精度与可信度研究初探
I r d c i n t e ii n a l s s a e i b lt v l a i n o nt o u to o pr c so na y i nd r la iiy e a u to f
摘 要 : 射 频制 导半 实物仿 真 是精 确制 导武 器研 制过程 的 重要 环 节 , 质量 和 可靠性 直接 其 关 系到 型号研 制 的质量和 效 率 , 目前在相 关理论 基 础 方 面的研 究 明显 滞后 于工 程 建设 。首 先 总结 了在 此领域 的发展 现 状 , 出 了仿 真 系统精度 分析 与 可信 度 评估 的重要 性 ; 指 然后从 原理 性 误差 、 设备 误 差 、 工具误 差等 三个 方 面, 分析 了影 响射频 仿真 系统精度 的主要 因素及特 点 , 此 在 基 础 上提 出了射 频仿 真 系统精 度分 析与 可信 度评 估研 究 的理论 体 系和技 术要 求 ; 最后 从 仿 真 系统精 度 分析和 仿 真结果 可信 度评 估 两个方 面 , 分别提 出 了具体 的研 究 思路 和技 术 方案 。 关 键词 : 射频仿 真 ; 实物仿 真 ; 度 ; 半 精 可信度
s se sp o o e . s ,t ee e e t r t d c n r n e h ia o d i i t o u e ,a c r i g t c u y t ms i r p s d Atl t h lm n a y s u y s e a i a d t c n c l a s n r d c d c o d n O a c — a o r
o t Afe h t u . t rt a ,ma n f c o s a d fa u e fe t g RF smu a in s s e s a e d s u s d,fo t r e a p c s i a t r n e t r s e f c i i lto y t m r ic s e n r m h e s e t
半实物仿真中导引头安装误差的影响分析
An l ss o n u n e I u e n t l to r r a y i f I f e c nd c d by I s a l i n Er o l a o e ke n r f S e r i Ha dwa e —i —t e —l o m u a i n r n h o p Si l to
t e co e o p c n d tr r t h e fr n e o h u d n e a d c n rl s se ,w i h if e c s t e f ei f h ls d lo a ee o ae t e p r ma c ft e g i a c n o t y tm i o o h c n u n e h i l y o l d t
p st n c n b ee td a c r ig t h h rc e si o i lt n s s m a d t e s e ila p iain o i o a e s lc e c o d n o te c a a tr t fs i i c mua i y t n h p ca p l t . o e c o KE YW ORDS: r wa e—i Ha d r n—t e—l o i l in; d rs e e ;n tl t n e rr C mp n a in ai mei h o p smu a o Ra a e k r I s l i r ; o e s t r h t t aao o o t c
b s fe o n lss a d mo e ig. M e nwhi a e o r ra ay i n d ln a l e,t o t fe r rc m p n ain aihmei o e fe tv i u wo s rso ro o e s t rt o t prv d efci eby sm — c lto r r s ntd. Th wo meho st a o ito h me dme tbeoe c m p tng a d t me me tt a g t a in a e p e e e e t t d h tc nss ft e a n n fr o u i n he a nd n o tr e
关于半实物仿真的半自动跟踪技术平台研究
关于半实物仿真的半自动跟踪技术平台研究发布时间:2022-10-21T08:06:14.263Z 来源:《科学与技术》2022年12期作者:朱喻麟[导读] 随着当前半自动跟踪系统的投入使用,朱喻麟航天江南集团有限公司贵州贵阳 550009摘要:随着当前半自动跟踪系统的投入使用,其所存在着快速性和平稳性不足、尚未满足处在复杂条件下多个快速目标作战需求、智能化程度比较低的弊端逐步显现出来。
为此,本文尝试着探讨半实物仿真的半自动跟踪技术平台的设计,以便能实现对于操作人员开展跟踪模拟训练提供有效支持,对于获得的训练效果予以定量评估。
除此之外,能够依托不同的操控装置与人员开展不同图像特征的长时间大样本训练,对于现阶段所拥有的软硬件总体性能进行评估,以便能够为研究新型智能半自动跟踪技术工作提供强有力支撑。
关键词:半实物仿真;半自动跟踪技术;智能化1 引言所谓的半自动跟踪系统也就是操瞄系统,当前在各种兵种装备领域得以普遍性应用。
半自动跟踪对比自动跟踪所具备的最为明显特征就是可以将人员的意图直接体现出来,对于跟踪对象进行准确的切换或者选取,尤其适用的则是处在相对比较复杂的条件下跟踪控制多目标。
往往半自动跟踪必须通过操纵手作用的发挥,依托白光、红外、雷达、激光、电视等探测单位得到视频形式的战场信息,按照相应的作战指令或者目标威胁程度,来选择相应作战目标,随后对目标相对视场中心存在的偏差量进行估计,进一步借助于操作装置的合理利用来产生控制信号,借助伺服装置带动目标探测器适当运动,从而将目标线与瞄准线两者之间存在的偏差量消除。
可是当前我军现役的装备半自动跟踪系统存在着相对比较简单的结构,智能化程序显得比较低,相对比较单一的算法功能,根本就不适应在复杂条件下的战场环境。
为了进一步对人机闭环、协同工作所存在的规律特征的深入研究,逐步建立起来操控意图和目标运动的特征两者之间的关系模型,本文尝试着半实物仿真对空目标,设计出来一套半自动跟踪技术的开发平台,以便实现强有力支持灵活、快速、准确的半自动跟踪技术。
电视制导半实物视线运动仿真误差分析
仿真的误差模型 ; 最后推导了视线运动仿真误差补偿算法 。仿真结果表 明, 改进方法有 效减小了转 台误差 和导 引头安装 误
差对视线运动 的误差影响 , 提高了仿真结果精度 , 为空地制导武器系统优化设计提供 了依据。
关键词 : 电视导引头 ; 半实物仿 真; 视线仿真 ; 误差分析; 误 差修正
ABS TRACT: T h e i n l f u e n c e o f t u nt r a b l e e r r o r a n d s e e k e r i n s t a l l i n g e r r o r o n c o n f i d e n c e d e g r e e o f a t t i t u d e g u i d a n c e a c c u r a c y i n ui g d a n c e a n d c o n t r o l s y s t e m wa s r e s e a r c h e d f o r T V g u i d i n g h a r d w a r e—i n—t h e—l o o p s i mu l a t i o n .Ai m t o s i mu l a t i o n p r e c i s i o n o f l i n e—o f —s i g h t mo v e me n t ,t h e i n l f u e n c e s i n d u c e d b y t u r n t a b l e e r r o r a n d s e e k e r i n s t a l l i n g e r —
r o r w e r e a n a l y z e d a n d t h e e r r o r c o m p e n s a t i o n a l g o r i t h m w a s p r e s e n t e d .F i r s t l y ,t h e e r o r e o n v e  ̄ i n g m o d e l s o f a d j a —
激光制导武器半实物仿真中激光能量模拟误差研究
1.1 激光信号传输链路分析 激光制导武器半实物仿真系统各设备布局及仿
真 系 统 物 理 坐 标 系 如 图 1所 示 遥
图 1激 光 制 导 武 器 半 实 物 仿 真 设 备 布 局 示 意 图 Fig.1 Equipment layout in the laser guided weapon hardware鄄in鄄
收稿日期院2018-05-05曰 修订日期院2018-06-03 作者简介院赵 宏 鹏 (1981-)袁男 袁工 程 师 袁主 要 从 事 光 电 对 抗 仿 真 技 术 方 面 的 研 究 遥 Email:shahn@
1006005-1
第 10 期
红外与激光工程
第 47 卷第 10 期 Vol.47 No.10
红外与激光工程
Infrared and Laser Engineering
2018 年 10 月 Oct.2018
激光制导武器半实物仿真中激光能量模拟误差研(中国洛阳电子装备试验中心,河南 洛阳 471003)
Study on laser energy simulating error in laser guided weapon hardware鄄in鄄the鄄loop simulation
Zhao Hongpeng, Gan Lin, Yin Ruiguang, Guo Hao, Liang Weiwei
(Luoyang Electronic Equipment Test Center of China, Luoyang 471003, China)
Abstract: In laser guided weapon hardware鄄in鄄the鄄loop simulation, laser energy is controlled accurately to simulate the laser energy in battlefield environment. In order to assure simulation reliability, simulating error should be analyzed. The laser signal transmitting process was analyzed, and the energy control uncertainty of every transmitting link was introduced. The laser energy simulating error model was developed and error analysis method was introduced by an example. The error model can be used to evaluate laser energy simulating error and to optimize simulation design, which can assure hardware鄄in鄄 the鄄loop simulation result precision. Key words: semi鄄active laser guided weapon; hardware鄄in鄄the鄄loop simulation; laser energy; error
【红外与激光工程】激光制导武器半实物仿真的误差分析与校正_范世鹏

光轴进动信号并生成制导指令传输给仿真机。 由仿 真机完成六自由度弹道实时解算, 并将弹体姿态作 为三轴转台的指令来模拟弹体俯仰和偏航角运动; 由导弹与目标的相对关系, 仿真机通过几何关系模 型得到出两轴转台的角度指令, 用以模拟真实弹目 视 线(Line of Sight, LOS)。
图 4 引入静态误差的制导模型 Fig.4 Model of guidance loop with static geometric error
在不同静态几何误差的条件下进行数学仿真, 弹道误差如图 5 所示。
图 6 导引头跟踪光斑的仿真实验示意图 Fig.6 HILS diagram of seeker tracking laser spot
Error analysis and correction for hardware-in-the-loop simulation system of laser guidance weapon
Fan Shipeng1, Lin Defu1, Wang Jinran2, Wang Wei1
(1. School of Aerospace Science, Beijing Institute of Technology, Beijing 100081, China; 2. College of Art and Design, Beijing Institute of Technology, Beijing 100081, China)
Abstract: According to the characteristic of laser guided weapon, a hardware-in-the-loop simulation (HILS) model for guidance and control system was founded. Then, all kinds of errors impacting on simulation system, especially geometric error, were analyzed, and a guidance model with error was created. Through the mathematic simulation, the maximal angle error was given to limit miss distance within allowable range. In order to correct the geometric error, a model of HILS was developed for seeker to track a certain laser spot on curtain. Using the obtained results, nonlinear over determined equations of error parameters were established. With combination of Newton iteration method and weighted least square method, the error parameters were solved and geometric model was corrected accurately. The results indicate that this approach has achieved exceptional accuracy and reliability, which is significant for next phase of HILS. Key words: hardware-in-the-loop simulation(HILS); terminal guided weapon; laser semi-active seeker;
空间对接半物理仿真系统失真的内模控制方法
空间对接半物理仿真系统失真的内模控制方法近年来,随着空间运载工具的发展,空间对接技术在航天应用中能发挥越来越重要的作用。
然而,空间对接半物理仿真系统失真问题一直在困扰着这项技术。
指示失真、失误识别和控制失真是对接失真的主要成分。
为了提高空间对接的准确性,本文介绍了一种新的内模控制方法,它能有效地改善空间对接半物理仿真系统的失真问题。
首先,针对失真参数,将其划分为可重复性参数和随机性参数。
其次,采用多项式模型拟合可重复性参数,建立其内模控制结构。
然后,采用对数随机调节模型,调节随机性参数。
最后,在半物理仿真中,系统迭代拟合模型,可以实现较高的精度和稳定性。
该内模控制方法可以有效改善空间对接半物理仿真系统的失真问题。
它能提高失真参数指示准确性,减少失误识别错误,改善对接整体控制性能,有效地抑制对接失真。
此外,该方法还可以有效地解决失真参数与模型之间的差异,实现更准确的模拟结果。
为了验证该内模控制方法的有效性,本文以近地空间对接仿真系统为例,研究了内模控制器的性能。
结果表明,该内模控制器能够有效减少失真,提高空间对接的准确性。
本文的研究结果表明,采用内模控制方法,能够有效地改善空间对接半物理仿真系统的失真问题。
该内模控制方法提高了失真参数指示准确性,减少失误识别错误,改善对接整体控制性能,有效地抑制对接失真,实现更准确的模拟结果。
它可以有效地支持空间对接技术的研究和应用,为空间运载工具的更加安全可靠的运行提供有力的保障。
总之,本文介绍了一种新的内模控制方法来改善空间对接半物理仿真系统的失真问题,并归纳总结了研究结果。
在今后的工作中,可以研究基于复杂模型的更好的失真控制方法,进一步提升空间对接技术的可靠性和准确性。