基于周期性中断源的多串口管理
stm32多任务多数据串口接收及处理方法
stm32多任务多数据串口接收及处理方法STM32多任务多数据串口接收及处理方法通常涉及到使用中断服务程序(ISR)或轮询方法来接收串口数据,并在多个任务之间分配和同步处理这些数据。
以下是一个基本的步骤和策略,用于实现这一功能:1. 初始化串口:首先,你需要初始化串口以进行通信。
这包括设置波特率、数据位、停止位、奇偶校验等。
2. 配置中断:STM32的串口通常具有一个接收中断。
你可以配置这个中断,以便每当一个新的字节被接收时,它就会触发一个中断。
3. 中断服务程序(ISR):在中断服务程序中,你可以读取接收缓冲区中的数据,并将其放入一个全局变量或数据结构中,以便其他任务或函数可以访问它。
4. 多任务处理:你可以使用一个任务或一组任务来处理这些串口数据。
这可能涉及到解析数据、执行某些操作或将数据发送到其他设备。
5. 数据同步:在多任务环境中,你需要确保数据的同步。
这意味着,当一个任务正在处理数据时,其他任务不能同时访问或修改这些数据。
这通常通过使用互斥锁、条件变量或其他同步机制来实现。
6. 轮询:除了使用中断,你还可以使用轮询方法来检查串口是否有数据可供读取。
这种方法可能在某些应用中更简单,但可能不如中断方法效率高。
7. 错误处理:不要忘记在代码中包含错误处理逻辑。
这可能包括检查读取的数据是否完整、是否有任何传输错误等。
8. 优化:对于高性能应用,你可能还需要考虑其他优化策略,如非阻塞读取、缓冲区管理、流量控制等。
以上只是一个基本的框架,具体的实现细节将取决于你的具体需求和STM32的具体型号。
建议查阅STM32的参考手册和相关文档以获取更详细的信息和示例代码。
全景视觉态势感知系统的多通道串口通信
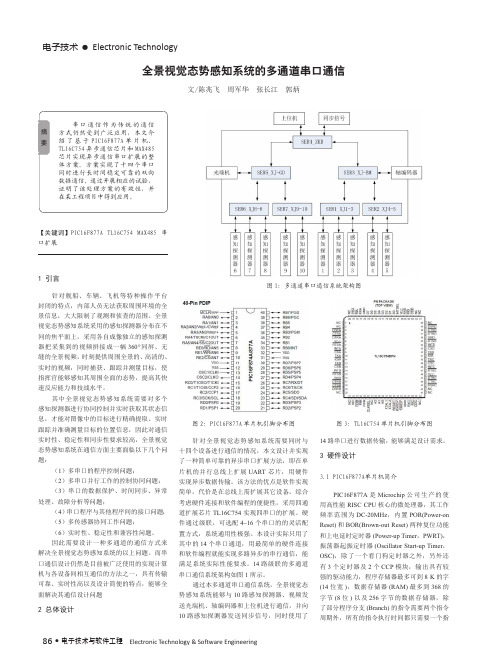
电子技术• Electronic Technology86 •电子技术与软件工程 Electronic Technology & Software Engineering【关键词】PIC16F877A TL16C754 MAX485 串口扩展1 引言针对舰船、车辆、飞机等特种操作平台封闭的特点,内部人员无法获取周围环境的全景信息,大大限制了观测和侦查的范围。
全景视觉态势感知系统采用的感知探测器分布在不同的焦平面上,采用各自成像独立的感知探测器把采集到的视频拼接成一幅360°同屏、无缝的全景视频,时刻提供周围全景的、高清的、实时的视频,同时捕获、跟踪并测量目标,使指挥官能够感知其周围全面的态势,提高其快速反应能力和技战水平。
其中全景视觉态势感知系统需要对多个感知探测器进行协同控制并实时获取其状态信息,才能对图像中的目标进行精确提取、实时跟踪并准确测量目标的位置信息,因此对通信实时性、稳定性和同步性要求较高,全景视觉态势感知系统在通信方面主要面临以下几个问题:(1)多串口的程序控制问题;(2)多串口并行工作的控制协同问题;(3)串口的数据保护、时间同步、异常处理、故障分析等问题;(4)串口程序与其他程序间的接口问题;(5)多传感器协同工作问题;(6)实时性、稳定性和兼容性问题。
因此需要设计一种多通道的通信方式来解决全景视觉态势感知系统的以上问题。
而串口通信设计仍然是目前被广泛使用的实现计算机与各设备间相互通信的方法之一,具有传输可靠、实时性高以及设计简便的特点,能够全面解决其通信设计问题2 总体设计全景视觉态势感知系统的多通道串口通信文/陈兆飞 周军华 张长江 郭炳串口通信作为传统的通信方式仍然受到广泛应用,本文介绍了基于PIC16F877A 单片机、TL16C754异步通信芯片和MAX485芯片实现异步通信串口扩展的整体方案。
方案实现了十四个串口同时进行长时间稳定可靠的双向数据通信。
基于UART Ip核实现嵌入式微处理器扩展多串口电路的设计

Γ
/ 2 . .
Γ Θ
5 Ε
Π5 Κ
Ε
二 Ε 9 Ε Α5
;
二
,
Η
!
Κ
;
4 Ρ=
34
(
)
二 ’
99 9 99 9 99 9
99 9
‘
5 3Φ
=
口扫口 口口 口口 ,
利
()
二
,
Α
5 =
’
5
5Ε
()
9
,
;
Γ ?一 Θ ;4
3
’
Υ 片选, . /
4
图
Δ
) (
为基 于发送
,
工 9
的发送 数据 状态机
电子
科学
从
#字 节的发 送 % &
黔鬓
量 为! 所示
, ,
,
基 于 % &设计 的 发送 数据有 限状 态机如 图
,
。
) (
服 务程 序
,
在中断服 务过 程 中
,
,
处理 器 按 顺序逐 个检查 多个扩 展 口 的 串 口
,
一 开始
,
发送 % & 处于 空 的状态
通 过 使能 % & 写入 信号 将数据 先
<
7.
9
8
9
8
9
7.
8
,
1
,
分 别为 四个,
Φ
9.
(
9 .
的 中断信 号 #
7 =Φ
;/ 1
8
9 2
!二 )
9 : .
1
Φ
最新 CPLD管理高效多串口中断源-精品
CPLD管理高效多串口中断源近几年来,随着后PC时代的来临,具有简洁、高效等特点的嵌入式系统得到了飞速的发展。
嵌入式技术发展到今天已将各种计算机技术多层次、多方面的交叉融合在了一起。
嵌入式系统加快了工业设计进程,降低了开发成本及其风险,使用简便,扩展灵活,高效精简,可方便地应用于各工业领域。
中断请求采用边沿触发来进行中断检测,通过将信号送到特定的引线来检测中断。
每条引线对应一个可能的硬件中断,因为系统不能辨认哪个设备使用中断线,所以当多个1个的设备被设置成使用同一个特定中断时就产生了混乱。
中断产生时,由专用的中断程序接管系统,首先把所有的CPU寄存器内容保存到堆栈里,并引导系统指向中断向量表。
在中断程序执行后的一段时间中,中断控制软件把堆栈内容返回给寄存器,系统恢复中断发生之前的状态。
如此段时间中又有中断请求,将造成中断的设备判断混乱,从而会造成中断冲突、丢失,甚至使得设置无法正常工作。
因此,每个中断通常被分配给单一的设备,使中断无法共享。
传统方法中,扩展多个串行口是利用多个中断源;但在嵌入式系统中,花费大量的中断源来扩展串口无疑是大量的资源浪费。
针对这种情况,为了节省紧张的系统资源,本文提出一种实现高效多串口中断方案,可以利用单一的中断源来管理多个扩展串口,并保证多个串口中断的无漏检测与服务。
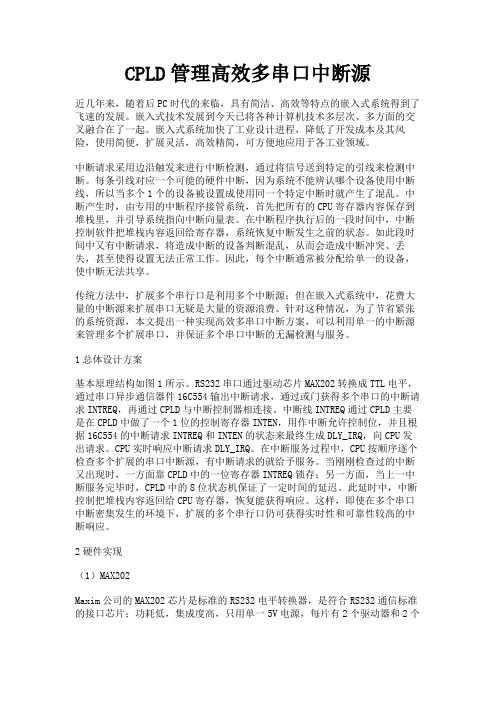
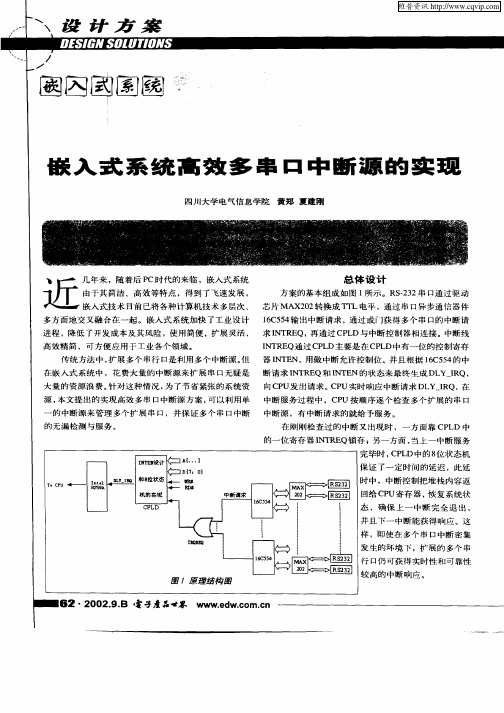
1总体设计方案基本原理结构如图1所示。
RS232串口通过驱动芯片MAX202转换成TTL电平,通过串口异步通信器件16C554输出中断请求,通过或门获得多个串口的中断请求INTREQ,再通过CPLD与中断控制器相连接。
中断线INTREQ通过CPLD主要是在CPLD中做了一个1位的控制寄存器INTEN,用作中断允许控制位,并且根据16C554的中断请求INTREQ和INTEN的状态来最终生成DLY_IRQ,向CPU发出请求。
CPU实时响应中断请求DLY_IRQ。
在中断服务过程中,CPU按顺序逐个检查多个扩展的串口中断源,有中断请求的就给予服务。
基于PCI总线的多串口卡驱动程序设计
基 于 P 总 线 的 多 串 1卡 驱 动程 序 设 计 CI : 3
基于 P I C 总线的多串 口卡驱动程序设计
Dr e sg o h ut s r l p r c r B s d o P B s i r De i n f rt e M l- e i — o t a d a e n CI u v i a —
o me to tn a d d vc r e o h l— e il p r c r a e n t e P b s a d a he e l— e il p r c r p n f sa d r e ie d i r f r te mut s r — o ad b s d o h CI u n c i d mut s r — o a d v i a t v i a t
( a g t e t接 口 , 必 须 既 可 以 以 中断 方 式 工 作 , 可 以 在 T re Ag n ) 它 又
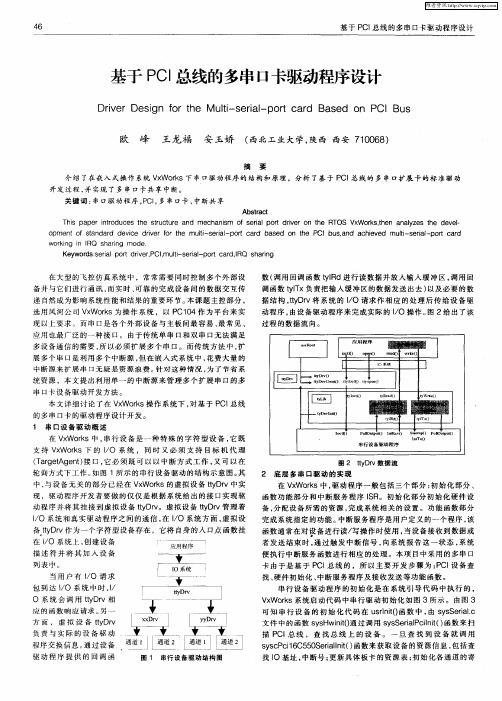
串行 设 备驱 动 程 序
图 2 t,r 据流 bDy数
轮 询方 式 下 工 作 。 图 1 示 的 串行 设 备驱 动 的 结 构 示 意 图 。 如 所 其
中, 与设 备 无 关 的部 分 已 经 在 V Wok x rs的虚 拟 设 备 tr v中实 tDr y
中断 源来 扩 展 串 口无疑 是 资 源 浪 费 。 对 这 种情 况 , 了节 省 系 针 为
l so l f uo f rt R
‘) x
任 , 嚣瞄 r 勰
o ) P
m 《 ) wre ) i(
l
l1 0
l
统 资 源 ,本 文 提 出 利用 单 一 的 中断 源 来 管 理多 个扩 展 串 口的 多 串 口卡设 备 驱 动 开 发方 法 。
基于WinCE和ARM的多串口扩展及485通信设计

基于WinCE和ARM的多串口扩展及485通信设计贾继鹏;张永坚;胡延凯【摘要】Along with the book evaluating standards for renewable energy building’s application projects implements in our country, we are in urgent need of the operational datas about the renewable energy building’s application demonstration projects. The data acquisition system of the renewable energy building’s application demonstration projects has one demand of multiple serial ports and a 485 bus communication. This paper uses ARM9 S3C2440 embedded microcontroller and VK3234 with four channel UART/SPI interface to extend serial. What’s more, it achieves the 485 communication between the field detection device and data acquisition device with MAX3485. This paper states the interface and software and hardware between S3C2440, VK3234 and MAX3485E specifically. The practical running test in the laboratory shows that the system is stable and reliable, and it has been applied in the data monitoring system of the renewable energy demonstration projects.%随着我国《可再生能源建筑应用工程评价标准》的实施,对已建可再生能源建筑应用示范项目运行数据的需求越来越迫切,为了解决可再生能源建筑应用示范项目数据采集系统中对多串口及485总线通信的需求,采用 ARM9嵌入式微控制器 S3C2440和具备 UART/SPI 接口的4通道芯片VK3234进行串口的扩展,并利用MAX3485E芯片,实现了现场检测设备与数据采集器之间的485通信。
基于UART Ip核实现嵌入式微处理器扩展多串口电路的设计

基于UARTIp核实现嵌入式微处理器扩展多串口电路的设计作者:方明林建中来源:《硅谷》2009年第05期[摘要]给出利用FPGA上实现的UART IP核,实现在微处理器S3C2440A总线上动态扩展多串口电路,论述基于发送和接收FIFO下的UART接口模块设计以及各主要功能模块实现。
另外,给出节省中断资源的用于实现串口动态扩展的电路。
最后,给出WINCE5.0下多串口设备驱动程序的实现框架。
[关键词]UART S3C2440A WINCE 5.0中图分类号:TP3文献标识码:A文章编号:16717597(2009)0310015-03一、引言由于基于FPGA/CPLD实现的电路在灵活性,体积,成本方面都有其优势。
本文从实际应用的角度出发,为了满足高速数据传输要求,利用FPGA实现了分别拥有512字节的发送和接收FIFO的UART接口模块,并采用接口电路动态扩展UART,以实现微处理器S3C2440A上实现扩展多串口的目的,在最少改动电路下满足要求高速传输的多串口场合。
同时,本文还给出了在嵌入式操作系统WINCE5.0下的多串口驱动实现过程。
二、硬件电路总体设计硬件电路实现如图(1)所示,主要有微处理器S3C2440A,两片缓冲器74LVTH162245分别用于地址总线/片选和数据总线的缓冲,以及一块FPGA模块组成。
微处理器是三星32bit ARM920T内核的S3C2440A,其主频在400MHZ,最高可达533MHZ,可扩展外部存器,具有丰富的I2C,SPI,CAN,以太网,USB等控制接口,还可通过总线扩展其他接口电路,应用层面非常广泛。
而FPGA模块的功能是使用VHDL实现了UART IP核以及多串口扩展控制电路,该控制电路通过产生多个串口的片选以及通过微处理器的1个GPIO口作为中断使能信号来高效管理多个串口中断共用一个中断的有效方法来实现多串口的扩展,通过这不仅节约了中断资源,同时,也保证了多个串口中断的无漏检测和服务。
基于DSP和FPGA的多串口通信的实现
收稿 臼期 :2 1-31 。 0 10—8
T 30 60 MS 2 C 0 0系列 只有 4个 外部 中的
F GA 是一 种基于 查表 的可编 程逻辑 器件 ,主 P
要 由逻辑 单元构 成 的可配 置逻辑 块 、可 编程 I 和 / 0 可编程 内部互连 模块构 成 。用户 可 以根 据 需要对 它 进行 编程 ,使之 生成特 定 的电路结 构 ,完成所 需功 能 。F G 内部阵列块 之 间采用 分段式 进行互连 , PA 因此 结构 比较灵 活 。F G 保存 逻辑功 能 的物 理结 PA 构多 为 S AM 型 , 电后丢 失原有 逻辑信 息 , 以 R 掉 所 使用 时需配 置 一个专 用 R OM,将设 计好 的逻辑 烧 录到其 中。系统 上 电时 ,F G 就 能 自动 从 R PA OM 中读取逻 辑信 息 。本 例设 计中所 使用 的是 Xin l x公 i
领 域 ,提高 了设备 的处 理速度 和功 能 的可扩展性 。
在 系统 内 , 点对 点 的 串 口通 信 在 技 术 上是很 成 熟 的 ,使 用数字 信 号处 理 ( P)芯 片作 为处理器 进 DS 行数 据交 互 简便且 高效 。DS P芯片 虽然有着 很 强火
有 4个外 部的 中断管脚 ,可 以对 应 4 不 同的外部 个
中断 。当 D P检 测到 中断信 号,发生 中断后将暂 停 S C U 当前进 程 ,转 入执行 中断所触 发 的特 定任务 , P 程序指 针转 向中断服 务程序 。 同时 DS P会 保存 当前 进程状 态 ,将相 关寄存 器状态保 存到 堆栈 中,以便 中断服 务程序执 行完成 后返 回主程序 时 ,恢复进入 中断服 务程序前 的进程 状态 。 基 于中断 的工作方 式 ,当有 多个 串 口中断源想 复用一 个中断 时 , P会无法 辨别 出此 中断 究竟是 DS 由那一个 串口中断源所 产生 的。如 图 1 。 无 法 分辨 中断 源 也 就无 法 做 出相 应 的处 理 动 作 。 以, 所 扩展 少量 串 口常常 是利用 多个硬件 中断 。
chap4 中断和处理机调度

第4章中断和处理机调度4.1中断4.2处理机调度4.3实时调度4.4多处理机调度操作系统的基本特征是并发与资源共享,而实现这些特征是和中断密不可分的,因而中断是与处理机管理密切相关的一个重要概念。
中断或中断机制是实现多道程序设计与并发执行的基础和必要条件。
4.1.1中断和指令周期有关中断的几个概念引起中断的事件或发出中断请求的来源称为中断源。
中断源向CPU发出处理请求称为中断请求。
硬件对中断请求作出反应的过程称为中断响应。
中断过程:┇┇12ii+1n┇在此处产生中断用户程序中断处理程序通过中断转移控制4.1.1中断和指令周期4.1.1 中断和指令周期取下一条指令分析指令执行指令检查中断;初始化中断处理程序停止开始取指阶段分析阶段执行阶段中断阶段图4.2中断和指令周期4.1.2 中断处理正在运行的程序中断装置中断处理程序时钟中断I/O 中断控制台中断硬件中断程序错误中断运行程序访管指令中断装置中断处理程序(a )强迫性中断(b )自愿性中断图4.3两类中断事件4.1.2 中断处理中断处理程序并不是每一个中断源一个中断处理程序,而是每类中断事件一个。
每个中断处理程序都有一个入口地址(PC)及其运行环境(PSW)当中断事件发生时,中断装置根据中断类别自动地将对应的PSW和PC分别送入程序状态字和程序计数器中,如此便转入到对应的中断处理程序。
这个转移类似于向量转移,因而PSW和PC也可以被称为中断向量。
4.1.2 中断处理┇PSW 1,PC 1PSW 2,PC 2PSW 3,PC 3PSW 4,PC 4PSW 5,PC 5┇PSW n ,PC n CSWCAW定时器PSW 1,PC 1PSW 2,PC 2PSW 3,PC 3PSW 4,PC 4PSW 5,PC 5┇,PC 现行PSW ,PC 旧PSW ,PC 新PSW ,PC ①③②PC 1:中断处理程序PC 2:中断处理程序PC 3:中断处理程序PC 4:中断处理程序PC 5:中断处理程序PC n :中断处理程序┇结束4.1.2 中断处理时钟中断的发生时,处理程序做许多系统管理的工作:进程管理作业管理:资源管理:事件处理系统维护实现软件时钟4.1.3 多个中断处理多个中断有两种方法:当正在处理一个中断时,禁止再发生中断。
STM8教程-第十二章-串口及其应用

STM8教程-第十二章-串口及其应用第十二章串口及其应用前面三节介绍了 STM8 的 IO 口以及时钟编程。
这一节我们将学习 STM8 的串口。
通过本节学习,你将了解到 STM8 串口的基本使用方法。
前面三节介绍了STM8的IO口操作以及时钟编程。
这一节我们将学习STM8的串口。
作为软件开发重要的调试手段,串口的作用是很大的。
在调试的时候可以用来查看和输入相关的信息。
在使用的时候,串口也是一个和外设(比如GPS,GPRS模块等)通信的重要渠道。
STM8的串口资源相当丰富的,功能也相当强劲。
STM8有波特率发生器、支持同步单线通信和半双工单线通讯、支持LIN、支持调制解调器操作、智能卡协议和IrDA SIR ENDEC规范接下来我们将从寄存器层面,告诉您如何设置串口,以达到我们最基本的通信功能。
本实例中,我们将实现利用串口1不停的打印一个信息到电脑上,以及例程二的同时接收从串口发过来的数据,把发送过来的数据直接送回给电脑。
串口最基本的设置,就是波特率的设置。
STM8 的串口使用是很简单的。
UARTD 是 UART 的使能位,0的时候使能UART,1的时候不可以用 UART,默认 0,M 是定义串口的字长,0为8位字长,1是9位的字长下面的 PECE,PS,PIEN 分别是奇偶效验,奇偶效验选择,效验中断使能。
由于我们没有定义奇偶效验在此不再详细说明,默认就可以。
1、UARTx_CR2控制寄存器 2 主要负责管理中断和发送接收的使能TIEN、TCIEN、RIEN、ILIEN 分别对应发送中断,发送完成中断,接收中断以及IDLE 中断TEN 是发送使能,当 TEN = 1 的时候我们就可以通过串口进行发送数据,当然前提是我们已经设置好对应的寄存器REN 是接收使能,当 REN = 1 的时候我们可以通过串口接收其它设备的数据RWU 接收唤醒SBK 发送断开帧2、UARTx_CR3在这个寄存器中我们主要使用了 STOP,也就是设置停止位数LINEN Lin 模式的使能,这里我们不详细说明STOP 设置停止位数 00 1 个停止位01 保留10 2 个停止位11 1.5 个停止位CLKEN 时钟使能,由于我们没有采用 3 根线,只用了 UART_RX 和 UART_TX 所以不需要设置这个寄存器,默认就可以CPOL、CPHA、LBCL 对应着的是时钟极性,时钟相位以及最后一个时钟脉冲,详细介绍请见寄存器手册3、波特率有关寄存器4、数据寄存器发送和接受的数据通过这个寄存器的读写就可以实现5、状态寄存器通过读取这个寄存器可以知道 UART 的工作状态我们本实验就需要查询这个寄存器的某个位,来清除数据是否发送完毕TXE 发送数据寄存器空0 的时候非空,1 为空TC 发送完成0 未完成 1 完成发送RXNE 读数据寄存器非空0 数据没有收到 1 数据收到其它的位分别为检查到 IDLE 总线,过载错误,噪声标志位,帧错误,奇偶效验错误简单的寄存器就结束到此,除此之外还有其它很多寄存器望读者查阅寄存器手册有了以上的基础,我们可以开始这一节的软件编写了在开始软件代码编程之前,先说明一下我们的硬件我们的实验板是共用一根 USB 线实现多功能操作,分别是下载程序功能,供电功能以及串口功能,传统的串口需要串口接口,考虑到方便我们自己通过 PL2303把串口转成可以通过 USB 进行通信,下面开始我们的例程一,简单的发送数据给终端例程一、简单数据发送#include "iostm8s207rb.h"void delay_ms(int value);int main( void ){unsigned char temp = 0;CLK_CKDIVR = 0x00; //主频为16MUART1_CR1 = 0x00; //关闭UART,设置数据位8位,禁止奇偶效验,禁止中断UART1_CR3 = 0x00; //一位停止位,默认值UART1_BRR2 = 0x0b; //设置波特率为115200UART1_BRR1 = 0x08;UART1_CR2_TEN = 1; //使能发送while(1){while(!UART1_SR_TC); //等待一帧发送完毕,再传送下一帧UART1_DR = temp;temp++;if(temp>=255)temp = 0;delay_ms(100);}}/************************************ *********简单延时程序*********************************** **********/void delay_ms(int value){int i,j;if(value < 1)value = 1;for(i=0;i!=value;++i)for(j=0;j!=5000;++j);}编译下载后,打开串口调试助手,复位单片机就可以看到对应的数据输出,如下图:可以看出是从 0 递进的数,因为我们的串口设置是 115200 波特率,所以串口调试助手也对应这个波特率例程二、串口接收及发送我们实现的功能是通过串口接收电脑的数据,并把对应的数据发送给电脑。
串口轮询接收,中断接收原理详解

串口轮询接收,中断接收原理详解
串口通信是一种常见的数据传输方式,它通过串行传输数据,
通常用于连接计算机和外部设备,或者连接嵌入式系统中的各种模块。
串口通信可以使用轮询和中断两种方式来接收数据。
首先,让我们来看一下串口通信的轮询接收方式。
在轮询接收中,CPU会周期性地查询串口接收缓冲区,以检查是否有新的数据
到达。
当串口接收到新的数据时,它会存储在接收缓冲区中,CPU
会定期查询这个缓冲区,如果发现有新的数据,就会将数据从缓冲
区中读取出来进行处理。
这种方式的优点是实现简单,适用于较为
简单的应用场景。
但是缺点也很明显,就是CPU需要不断地查询串
口接收缓冲区,这样会占用大量的CPU资源,不利于系统的实时性
和效率。
接下来我们来看一下串口通信的中断接收原理。
在中断接收中,当串口接收到新的数据时,会触发一个中断信号,通知CPU有数据
到达。
CPU在接收到中断信号后,会立即暂停当前的任务,转而处
理串口接收中断的相关代码。
在中断处理程序中,CPU会读取串口
接收缓冲区中的数据,并进行相应的处理。
这种方式相比于轮询方式,能够有效地减少CPU资源的占用,提高系统的实时性和效率。
总的来说,中断接收相比于轮询接收具有更好的实时性和效率。
因为中断接收能够及时响应串口接收到数据的事件,而不需要不断
地占用CPU资源进行查询。
但是中断处理也需要一定的开销,因此
在选择串口接收方式时,需要根据具体的应用场景和系统要求来进
行权衡和选择。
希望这个回答能够对你有所帮助。
USART串口通信,中断方式,一分钟从菜鸟到大师(完整版)
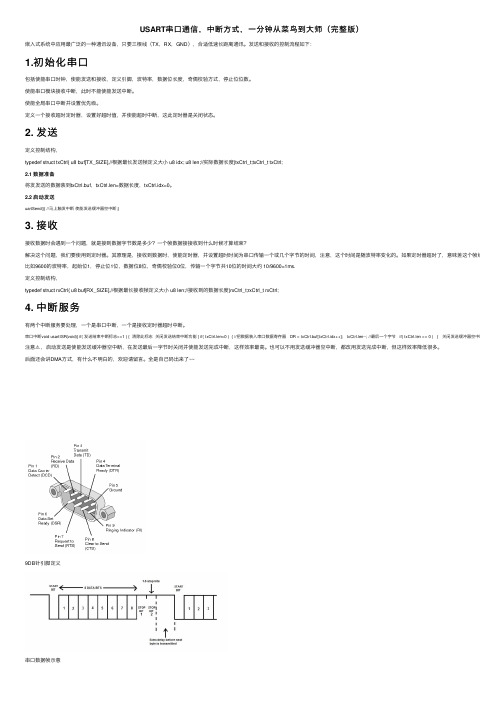
USART串⼝通信,中断⽅式,⼀分钟从菜鸟到⼤师(完整版)嵌⼊式系统中应⽤最⼴泛的⼀种通讯设备,只要三根线(TX,RX,GND),合适低速长距离通讯。
发送和接收的控制流程如下:1.初始化串⼝包括使能串⼝时钟,使能发送和接收,定义引脚,波特率,数据位长度,奇偶校验⽅式,停⽌位位数。
使能串⼝模块接收中断,此时不能使能发送中断。
使能全局串⼝中断并设置优先级。
定义⼀个接收超时定时器,设置好超时值,并使能超时中断,这此定时器是关闭状态。
2. 发送定义控制结构,typedef struct txCtrl{ u8 buf[TX_SIZE],//根据最长发送帧定义⼤⼩ u8 idx; u8 len;//实际数据长度}txCtrl_t;txCtrl_t txCtrl;2.1 数据准备将发发送的数据装到txCtrl.buf,txCtrl.len=数据长度,txCtrl.idx=0。
2.2 启动发送uartSend(){ //马上触发中断使能发送缓冲器空中断;}3. 接收接收数据时会遇到⼀个问题,就是接到数据字节数是多少?⼀个帧数据接接收到什么时候才算结束?解决这个问题,我们要使⽤到定时器。
其原理是,接收到数据时,使能定时器,并设置超时时间为串⼝传输⼀个或⼏个字节的时间,注意,这个时间是随波特率变化的。
如果定时器超时了,意味差这个帧结束了。
⽐如9600的波特率,起始位1,停⽌位1位,数据位8位,奇偶校验位0位,传输⼀个字节共10位的时间⼤约 10/9600=1ms.定义控制结构,typedef struct rxCtrl{ u8 buf[RX_SIZE],//根据最长接收帧定义⼤⼩ u8 len;//接收到的数据长度}rxCtrl_t;rxCtrl_t rxCtrl;4. 中断服务有两个中断服务要处理,⼀个是串⼝中断,⼀个是接收定时器超时中断。
串⼝中断void usartISR(void){ if( 发送结束中断标志==1 ) { 清除此标志关闭发送结束中断功能 } if( txCtrl.len>0 ) { //把数据装⼊串⼝数据寄存器 DR = txCtrl.buf[txCtrl.idx++]; txCtrl.len--; //最后⼀个字节 if( txCtrl.len == 0 ) { 关闭发送缓冲器空中断,使能发送注意⚠ ,启动发送是使能发送缓冲器空中断,在发送最后⼀字节时关闭并使能发送完成中断,这样效率最⾼。
多串口单一中断源芯片设计探讨
发器 、 中断控制管理和地址锁存三个模块, 上层模块负责处理模块的 计数控制的。 调用 、 模块间的信号连接和控制向外传送数据或标志位。 2 地址寄存器模块。地址锁存模块在 ae . 4 l信号( 单片机地址锁存允 许信号) 到来时将地址低 8 位锁存起来 , 并送给中断控制和上层模块 2 模块设计 2 顶层模块顶层模块在各模块设计之前作为统筹规划整个程序, 使用。 . 1 是 寸 - 过程中再继续完善和修正的重要部分。 在顶层模块里根据不同 3 结论 的地址输入, 选择标志或者数据的传送。为了更好地将两次操作区分 本文设计了一种实现高效多串口单一中断源的芯片。本设计 的 在中断管理方面 , 利用单一的中断源来管理多个扩展串口, 开来使编程更加容易 ,还设计了一个标志寄存器 r_ hc— o n r 功能特点 : d cek cu t , e 在不同的操作来时 , 它的值不同。 并保证多个串口中断的无漏检测与服务; 在数据传送方面 , 实现串行 2 中断控制模块。中断控制模块要完成置标志位, . 2 定时输出中断信 数据的接收和发送, 并且按照数据传送是否有奇偶校验位分为两种工 号和向单片机传送标志位信息等功能。模块接收端有中断请求到来 , 作模式 , 在接收时具有数据缓存的功能。并且上述各个功能模块在单 中断控制模块即将相应收发器的标志位置 1 ,在数据被读取之后 , 又 的可编程逻辑器件芯片就能实现。
1 通 常 防护 措施
复位 , 必须准确判断是否为上电复位。由于失控的程序常常会非法写
1 供电系统。在微机系统 中, . 1 最严重的干扰来源为电源的污染。为 操作, 因而软件标志可靠 陛较低。 在可靠性要求高的场合 , 通常设立硬 了防止从电源系统弓人的干扰, 1 一是要将 - 的供电与大功率的用电 件上电标志。 棚l 设备的电源分开 , 最好单独供电; - 一是在单片机系统电源变压器的初 3 使用空操作指令 级串接—低通滤波器, 有效阻止高次谐波串入系统 , 改善电源波形, 提 MC - 指令系统中有部分双字节和三字节指令 , S5 1 当程序弹飞落 高单片机系统的抗干扰能力。 到这些指令的操作数上时, 将把操作数当成指令 , 产生错误的结果。 因 在程序中重要的地方( 如跳转、 调子程序 ) 等插入两条空操作指令 , 1 输入输出通道。 入 . 2 输 输出通道是单片机与传感器 、 单片机与上位 而, 机以及单片机与执行机构之间的信息传送的路径。在微机系统 中, 传 可拦截弹飞的程序并转入正常。 输线上的信息多为脉冲波和较弱的测量信号电压 , 在长线传输时会产 3 建立软件陷阱。所谓“ . 1 软件陷阱” 就是在程序中加入的一组用于 该地址 生衰减、 、 延时 畸变。信号隔离是抵抗 外界干扰 的 必要而有效的措施, 拦截弹飞程序的程序段。它强行将程序转向—个特定的地址 , 它隔断外界的共模电压和外界串入的电磁干扰 , 从而保证单片机的工 放有出错处理程序。 3 出错处理程序。错误处理程序的共同点是先关闭中断 , . 2 防止事态 作环境 , 使整个系统正常运行。 扩大。 对于有“ 看门狗” 电路的系统来讲 , 等待复位即可。 而软件复位和 2 程序运行监视系统 硬件“ 看门狗” 复位不同。 此时 C U片内的寄存器和 I l P / E状态是不定 0 程序运行监视系统又称“ 门狗”是一种有效的防止微机系统死 看 , P 机的电路。 部分单片机(0 5 2等) 8C 5 片内就包括“ 看门狗” 电路; 程序运 的。所以错误处理程序在转向程序起点前 ,要将 C U片内的各寄存 已激活的中断标志和 I I软件” / E“ O 复位 , 进入初始状态, 再转入程 行监视系统也可用专用硬件 电 路实现。一旦“ 看门狗” 电路被启动, 在 器 、
51单片机串口中断与定时器中断共存同时使用

51单片机串口中断与定时器中断共存同时使用单片机中的串口中断和定时器中断在许多应用中都是非常常见的功能,由于它们常常需要同时使用,所以如何使它们共存成为了一个非常重要的问题。
在51单片机中,串口中断和定时器中断共存的具体实现可分为两个方面来考虑:硬件和软件。
1.硬件方面:首先,需要选择合适的串口和定时器资源。
在51单片机中,一般有多个串口和定时器可供选择,需要根据具体的需求来选择合适的资源。
通常情况下,UART片内串口是一个常见的选择,而定时器0是最常用的定时器。
其次,需要配置串口和定时器的中断优先级。
在8051单片机中,中断的优先级是通过EA(全局中断使能)与各个中断源的IE(中断使能位)来实现的。
当EBIT中的各位都清零时,所有中断都被禁止。
对于串口和定时器中断的优先级,一般情况下,定时器中断的优先级要高于串口中断的优先级,所以在配置中断优先级时,需要将定时器中断的中断使能比串口中断的中断使能位设置为高。
2.软件方面:对于串口和定时器中断共存的软件实现,一般需要考虑以下几个关键点:-中断服务函数(ISR)的实现:需要根据中断源的不同,编写相应的中断服务函数。
在编写中断服务函数时,需要注意避免冲突和竞争条件。
可以使用标志位来进行互斥操作,以确保在一些中断服务函数执行期间,其他中断服务函数不会被执行。
-数据的缓冲和处理:在串口中断中,接收到的数据需要进行缓冲和处理。
对于定时器中断,需要考虑定时中断的频率和数据处理的时序。
在这个过程中,需要合理地设计缓冲区和数据处理算法,以确保数据的正确性和完整性。
-时间片的分配和利用:在同时使用串口中断和定时器中断时,需要合理分配时间片,以提高系统的性能。
可以使用优先级和时间片轮转算法,确保各个任务之间的执行顺序和时序要求。
以上是关于51单片机中串口中断和定时器中断共存同时使用的一些思路和实现方法。
在具体应用中,还需要结合具体需求和硬件资源来做相应的设计和调整。
嵌入式系统高效多串口中断源的实现
的 MA 0 芯 片 为 X2 2
… 一
2一 三 … “ 转S- 标标S … X 3符 2准 准2 换3 通合 的2 器, 信电 R平 ,耗 功 R T I n 、 , 、
低, 集成 度高, 只用
茧一 5 . V由源 . {
e菌 , 0 了
_ ÷) . j j
的 无 漏 检测 与 服 务 。
62 ・ 0 29 B ・ 2 0 . . 童子煮品t幂
w . wc m。n wwe . d o c
维普资讯
设 计 方 案 /一 /
、
、
\
--
硬 件 实 现
M AX20 பைடு நூலகம் 2
M AXI 公 司 M
O 更 加 可 靠 ,每 个 信 道 实 现 串 行 和 并 行 两 种 连 接 方 式 的 所示 :地 址 总 线 A对 应 I E NT N的 1地 址 , 据线 D【】 : 1 数 0对 转 换 ,每 个 信 道 的 状 态 可以 通 过 C U的 操 作 读 取 ,可 以 应 I T N 的 数 据 ,数 据 在 L P N E #的 上 升 沿 锁 定 。
全部接 1电路 简单 ,可靠性 高 ,实现 T L电平和 R 一3 产品以及一 个硬件平台上 多个品种的实现 。使用可编 程 : 1 T S2 2
1C 5 是 集 成 异 步 通 信 元 件 , FF 6 54 在 IO模 式 , 输 和 程 ( P 功能 的 可 编 程 逻 辑 器件 ,不 需 要 重 新 修 改 P B即 传 I ) S C 接 收 前 将 数 据 缓 冲 为 1 字 节 数 据 包 , 少 了 C U的 中断 可 修 改 原 有 设 计 。 6 减 P 数 量 。包 含 四 个 改 良 1C 5 6 5 0异步 传输 器 件 ,使得 串 行 I / () C L 中 设 计 一 位 寄 存 器 I E 1 在 PD NT N原 理 图如 图 2
基于CPLD的多串口扩展系统设计与测试

传统扩展 多个 串行 口的方法是 利用 多个 中断
普通 P C主机上 的一个 US B接 口扩展为 8个通用 串行接 口, 在设 备驱动程序 中将 这 8个 串 口作 为虚拟 串 口, 得主机 可 以 并 使 如 同操作本 机串 口~样通 过 US B口对 串口设备进行数据读 取 。从而 满 足了单 台 F ' C主机 同时连接 多 台串 口设 备 的需 求 , 而
t ee e d d s se ,u e igei tr u ts u c om a a emu tpes ra o t. I a x a d o eU S h mb d e y t m s ssn l n e r p o ret n g lil e il rs t n e p n n B p c p r nPC i t i h e e a eil o t ,a di h e ied ie h e il o t r s d a it a e o to n o eg tg n r l ra rs n nt ed vc rv rt e8 s ra rswe eu e svru ls — s p p ra o t ,t e h o tc n u et e es ra o t h o g h B p r st ec m mo n slc l . Ths il rs h n t eh s a s h s e il rst r u h t eUS o ta h o p p n o e o al y i m e t h e d o h ig ePC h s o c n e twih ma y s ra e ie t h a i e lo g a a te est en e ft esn l o tt o n c t n e il vc sa es met d t m ,as u r n e s t ei s e to n e vc o s v r litr u to sfo s ra o t t o ta y la . h n p cin a d s r ie t e ea n e r p n r m e i1p rswi u n e k i h Ke r s s ra o t CPI ;n er p o r e vru l e il o t y wo d : e ilp r ; i tr u ts u c ; it a ra r D s p
基于USB的ATM系统多串口扩展的设计
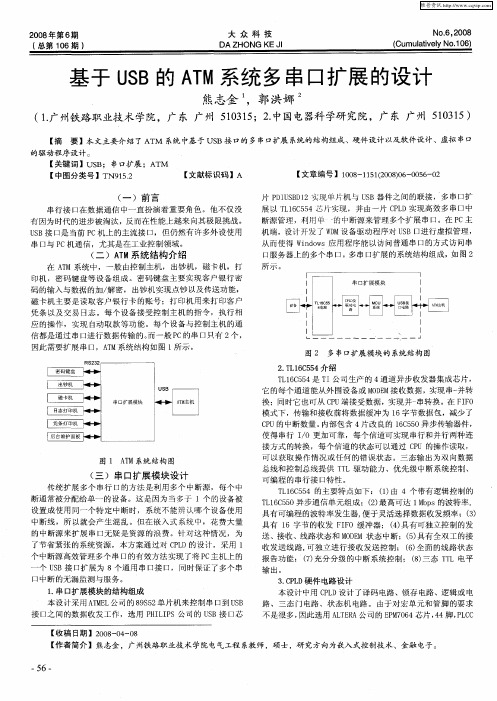
( )A M系统结 构 介绍 二 T
在 A M系统 中,一般 由控制主机 ,出钞机,磁卡机,打 T 印机 ,密 码 键 盘 等 设 备 组 成 。 密 码 键 盘 主 要 实 现 客 户 银 行 密 码的输入与数据 的) / J 解密, 出钞机实现点钞 以及传送功 能, H 磁卡机主 要是读取客户银 行卡 的账 号;打 印机用 来打印客户
密 码键 盘 出钞 机 ■ _. — - ■. _
图 2 多 串口扩展模块 的 系统结构图
2 T1C5 绍 . L 6 54介
T 1C 5 L 6 5 4是 T I公司生产的 4通道异步收发器集成芯片 , 它的每个通道能从外 围设备或 M D M接收数据 ,实现 串一 OE 并转
串
口扩 展模 块
磁 卡 机
日志 打 印机
●- - ●
●— ’ ■
凭条 打 印机
I。 _ ●
换;同时它也可从 C U端接受数据 ,实现 并一 P 串转换 。在 F F IO 模式下 ,传输和接收前将数据缓冲 为 1 6字节数据包 ,减少 了 C U的 中 断 数 量 。 P 内部 包 含 4片 改 良的 1C 5 6 5 0异 步 传 输 器件 , 使得串行 IO更加可靠 ,每个信道可实现 串行和并行两种连 / 接方式 的转换 ,每个信道 的状态可 以通过 C U的操作读取 , P 可 以获 取 操 作情 况 或 任 何 的错 误 状 态 。三 态 输 出 为 双 向数 据
总 线 和 控 制 总 线 提 供 T L驱 动 能 力 、优 先 级 中 断系 统 控 制 、 T 可 编 程 的 串行 接 口特 性 。 T 1C 5 的主 要 特 点如 下 : () 4 个 带有 逻 辑 控 制 的 L 6 54 1由
STM32HAL库使用中断实现串口接收不定长数据

STM32HAL库使⽤中断实现串⼝接收不定长数据 以前⽤DMA实现接收不定长数据,DMA的⽅法接收串⼝助⼿的数据,全部没问题,不过如果接收模块返回的数据,⽽这些数据如果包含回车换⾏的话就会停⽌接收,例如接收:AT\r\nOK\r\n,就只能接收到AT\r,导致没有接收完成,具体原因还没搞懂,有了解的,希望可以告知⼀下,DMA不定长接收⽅法传输门:。
好了,不多说了,现在进⼊正⽂。
⾸先建⽴⼀个STM32Cumebx的⼯程,打开串⼝中断,完成配置,具体的配置流程就不细说了,没什么难度就只是打开串⼝跟中断⽽已。
⽣成⼯程代码后,先定义好⼀些变量://串⼝4中断接收定义#define MAX_RECV_LEN 1024 //设定可以接收的最⼤字节uint8_t msg_buff[MAX_RECV_LEN] = {0}; //接收缓存区uint8_t * msg = msg_buff; //定义⼀个指针指向接收缓存区int flag = 0; //接收完成标志int len_u4=0; //数据长度记录 接着重写串⼝接收回调函数/*重写串⼝接收回调函数*/void HAL_UART_RxCpltCallback(UART_HandleTypeDef*UartHandle){uint8_t ret = HAL_OK;msg++;len_u4++;//数据长度计数if( msg == msg_buff + MAX_RECV_LEN){msg = msg_buff;}do{ret = HAL_UART_Receive_IT(UartHandle,(uint8_t *)msg,1);}while(ret != HAL_OK);if(*(msg-1) == '\n') //接收以\n为结尾字符,则表⽰接收完成{flag = 1;}} 最后在main函数⾥⾯编写接收后的逻辑,注意要在while(1){ }前打开串⼝接收中断int main(void){/* USER CODE BEGIN 1 *//* USER CODE END 1 *//* MCU Configuration----------------------------------------------------------*//* Reset of all peripherals, Initializes the Flash interface and the Systick. */HAL_Init();/* USER CODE BEGIN Init *//* USER CODE END Init *//* Configure the system clock */SystemClock_Config();/* USER CODE BEGIN SysInit *//* USER CODE END SysInit *//* Initialize all configured peripherals */MX_GPIO_Init(); MX_DMA_Init(); MX_USART3_UART_Init();MX_UART4_Init();/* USER CODE BEGIN 2 *//* USER CODE END 2 *//* Infinite loop *//* USER CODE BEGIN WHILE *///⾃⼰添加代码部分:while前打开串⼝中断接收HAL_UART_Receive_IT(&huart4, (uint8_t *)msg, 1); //开启第⼀次中断while (1){/* USER CODE END WHILE *//* USER CODE BEGIN 3 *///======⾃⼰添加代码部分=========if (flag == 1){printf("msg_buff = %s ;len = %d\r\n",msg_buff,len_u4); HAL_Delay(100); //加延时,保证接收到数据过长的时候,等待数据存⼊缓存区发送HAL_UART_Transmit(&huart3,msg_buff, len_u4,100); //将串⼝4接收到的数据通过串⼝3传出memset(msg_buff, 0, sizeof(msg_buff)); //清空缓存区// 指向接收缓存的头部msg = msg_buff;(&huart4)->pRxBuffPtr = msg;flag = 0;len_u4=0;//每次数据长度清0}HAL_Delay(10);}//==============================/* USER CODE END 3 */} 运⾏结果如下,效果正确 谈谈串⼝RS232跟RS485:这两个串⼝除了逻辑电平不同外,还有传输距离也不同,如果对速度要求不⾼,传输距离要⽐较远的就⽤RS485⽐较好,虽然RS485是个半双⼯,但是抑制共模⼲扰能⼒⽐较强,不过这些只是对于硬件层⾯的,对于软件层⾯来说他们的本质都是串⼝,在STM32Cubemx中,都是只是配置为串⼝,按照串⼝的编程来处理即可。
基于EPM7064的多串口管理系统设计
基于EPM7064的多串口管理系统设计汤少维【摘要】本系统基于ALTERA 的CPLD EPM7064,针对嵌入式系统的精简特性,设计利用1个中断源高效管理多个串口.将普通PC主机上的一个USB接口扩展为8个通用串行接口,并在设备驱动程序中将这8个串口作为虚拟串口,使得主机可以如同操作本机串口一样通过USB口对串口设备进行数据读取.从而满足了单台PC主机同时连接多台串口设备的需求,而且保证了多个串口中断的无漏监测与服务.【期刊名称】《现代电子技术》【年(卷),期】2006(029)004【总页数】4页(P78-80,82)【关键词】串口;CPLD;中断源;虚拟串口【作者】汤少维【作者单位】电子科技大学,通信与信息工程学院,四川,成都,610054【正文语种】中文【中图分类】TP334.7串行接口在数据通信中一直扮演着重要角色。
他不仅没有因为时代的进步被淘汰,反而在性能上越来向其极限挑战。
USB接口是当前PC机上的主流接口,但仍然有许多外设使用串口与PC机通信,尤其是在工业控制领域。
普通PC机所提供的串口资源往往是不够的。
传统扩展多个串行口的方法是利用多个中断源,每个中断通常被分配给单一的设备。
这是因为当多于1个的设备被设置成使用同一个特定中断时,系统不能辨认哪个设备使用中断线,所以就会产生混乱。
但在嵌入式系统中,花费大量的中断源来扩展串口无疑是资源的浪费。
针对这种情况,为了节省紧张的系统资源,本方案通过对CPLD的设计,采用1个中断源高效管理多个串口的有效方法实现了将PC主机上的一个USB接口扩展为8个通用串口接口,同时保证了多个串口中断的无漏监测与服务。
本设计方案(参见图1)采用ATMEL公司的89C52单片机来控制串口到USB接口之间的数据收发工作,选用Philips公司的USB接口芯片PDIUSBD12实现单片机与USB器件之间的连接,多串口扩展以TL16C554芯片实现,并由一片CPLD(ALTERA的EPM7064)实现高效多串口中断源管理,利用单一的中断源来管理多个扩展串口。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(ntueo cutsteC ieeA ae f cecsB in 0 0 0 C ia Isi t f osc,h hns cdmyo i e, e ig10 8 , hn) t A i S n j
Ab t a t Ac od n ot e c a a t r t f s n h o o ss r l o s r c : c r i g t h h r ce si o y c r n u e a mmu iai n a n v lmeh d h sb e r p s d T e d s n u e i c a i c nc t , o e o to a en po oe 、 h ei ss g a c ce n er p o r et n g l — ei l o t, ih c n me tte n e fmut s r o sa h a l i 、 y ld i tru ts uc o ma a e mu t s ra p rs wh c a e h e d o l — ei p r t e s n e t i i l a t t me Ke r s c c e n er p o r e a y c r n u e a o y wo d : y ld i tru ts u c ; s n h o o s s r c mmu i ain i l nc t o
了 多路 数 据 的 无 漏检 测 和 实 时响 应 , 并在 实 际应 用 中得 到 验 证 。 关键词 : 周期 性 中断 源 ; 步 串行 通 信 异
中图分类号 :P 3 T 34
文献标识码 : A
文章编 号:0 0—82 (0 7 1 0 7 — 3 10 89 20 )0— 0 8 0
使用的多中断源管理方式 主要有两种 : 软件查 询排序 和硬件排 序 。软件查询排序 的特点是 : 查询次序 即优先权排序 , 最先被询
保证 正确 的通信 。在同步 串行 通信 中由于加入位时钟信 号 , 能 保证 正确 的传输 。异步 串行通 信 由于没 有位定时时钟 , 以在 所
串行通信 中必须规定字符数据 的传送格式 , 即每个数据 以相 同 的帧格式传送。每一帧信 息由起始位 、 数据位 、 奇偶校验位和停 止位组成 ( 图 1所示 ) 如 。起 始位 的作用是 通知对 方 1 通信 次 的开始 , 在通信 线上没 有数据 传送 时处于逻辑 ‘ ’ 态。当发 1状 送设备要发 送 1 个数据时 , 首先发 出 1个逻辑 ‘ ’ 0 信号 , 表示 通 信 的开始 , 这个逻辑 ‘ ’ 0 就是起始位 , 当接收设备检测 到起 始位 后, 就开始准备接收数据位信号 , 数据位在传输过程 中紧跟在起
中断进行排 队, 还有菊花链式硬件排序电路 , 以及中断控制集 成
芯 片 8 5 A, 是 硬 件 排 序 的 方 法存 在 中断 服 务 程 序 编 写 复 杂 , 29 但 中 断 次数 较 多 的缺 点 。
本研究针对异步串行通信 的特 点 , 使用 一个周 期信号代 替 多个外部 中断源作为 中断信 号 , 为周期性 中断源 。系统 中通 称
M u t・ ra r a g m e s d n Cy ld I t r u t liSe ilPo tM na e ntBa e o ce n e r p
HOU e — n, ZHANG e g CHEN n p ng W imi Ch n , Da — i ,CAI Hu —h iz i
问的中断请求 具有最 高优先级 。软件查 询 的优点 是节省硬 件 ,
修改方便 , 只要改变程序 中的查 询次序 即可。缺点是 由开始查 询至转到真正的服务程序入 口时间长 , 中断源较多 的情况下 在 执行速度较慢 ; 并且 由于 中断产生 的时间间隔不确定性 , 中断 在 程序执行后 的一段时间 内如果有 中断 请求 , 可能会造成 中断 的 设备判断混乱 , 从而引起 中断 冲突 、 丢失 , 甚至使得设备 无法正 常 作。硬件排序…般采用 优先权 的编 码电路 , 工 = 对各种外 部硬
在微机系统和嵌入式 系统 中, 处理器本身 中断引脚有限 , 经
通信是按位顺序传输的 , 各个数据位之间需要严格 的定时 , 能 才
常存在多个外部硬 件中断源共享一条 中断线的情况。由于各 中 断源 中断产生的时间彼 此独立 , 必须采用 软件或硬件 方法对 多 中断源优先权排列 和多级 中断嵌套等问题进行管理 。 目前广泛
维普资讯 http://www.cqຫໍສະໝຸດ
・
7 8・
《 测控技术) 07年第 2 ) 0 2 6卷 第 1 0期
基于周期性中断源 的多串 口管理
侯卫 民 , 张 骋 ,陈丹平 , 惠智 蔡
10 8 ) 00 0 ( 国科 学 院 声 学 研 究 所 , 京 中 北
摘要 : 针对于异 步串行通信的特点 , 出了采用一个周期 性 中断源管理 多个异步 串行通道的方法 , 提 节省 了系统的资源, 实现
始位后 发送 , 其个数可以是 5 6 7或 8位 的数据 , ,, 数据位 按从 最 小有效位( S 到最高有效 位 ( B 的次序 依次传送 , L B) MS ) 奇偶 校 验位用 于有限差错检 验 , 在数据位后发 送。它通过提供 1个 跟
冗余位来实现对数据 的有限检错。通信中可以按一定的格式来 选 择奇偶校验 的方式 : 奇偶 校验 、 无 奇校验或偶校验 。停止位 标 志着 1 个字符 数据 的结束 。它 的长度可 以是 1位 、 1位半 和 2 位 。用逻辑 ‘ ’ 示。在异 步通信 中, 1表 字符 数据 以 图 1所示 的