步进电机升降速曲线控制方法
步进电机的速度调节方法解读

步进电机的速度调节方法解读变频与调速步进电机的速度调节方法王玉琳1, 王强2(1.合肥工业大学机械与汽车工程学院,合肥230069;2.合肥工业大学材料科学与工程学院,合肥230009摘要:提出了步进电机的几种速度调节方法。
脉冲频率的调节采用软件延时或硬件定时。
升降频采用直线升降法、指数曲线升降法或抛物线升降法。
给出了脉冲频率调节的实用程序,通过对步进电机矩频特性曲线的分析,得出了步进电机的升频表格,并提供了一个完整的软件升降频流程图。
几种调速方法应用在多种数控机床上,提高了步进电机的定位精度,改善了电机转动的平稳性,加速了电机的升降过程。
关键词:步进电机;速度控制;升降频中图分类号:T M301.2∶T M383.6 文献标识码:A文章编号:100128085(20060120053204M ethods of Speed Regul a ti on for Stepper M otorWAN G Yu2lin, WAN G Q iang(1.School of Mechanical&Aut omotive Eng.,Hefei Technol ogyUniv.,Hefei230069,China;2.School of Material Science&Eng.,Hefei Technol ogy Univ.,Hefei230009,ChinaAbstract:Several kinds of methods of s peed regulati on for stepper mot or are p resented in the paper.The fre2 quency of feeding pulses is regulated by s oft w a re’s delaying or hard ware’s ti m ing.The frequency2rising and frequency2 falling use linear method,exponential curve method and parabolic curve method.The practical p r ogra m s are given f or the regulating of pulses’frequency.The frequency2rising table of the stepper mot or is got by analyzing the characteris2 tics of the t orque2frequency curve of the mot or and a comp lete s oft w are fl ow chart of frequency2rising and frequency2 falling is p resented.Several kinds of speed2regulating methods have been used in many CNC machine2t ools and the positi oning accuracy of the stepper mot or is raised,the r otati on of the mot or becomes more s mooth and the s peed2ris2 ing and s peed2falling of the mot or are accelerated.Key words:stepper m otor;speed con trol;frequency2r isi n g and frequency2fa lli n g0 引言步进电机是一种数字电机,在经济型数控机床及自动化设备中应用广泛。
步进电机S曲线加减速控制研究与实现
• 介绍了其脉冲产生机制,对S曲线加减速的算法及其曲线 方程作了分析推导并进一步阐述了将曲线转化为脉冲的离 散实现过程。
减肥最有效的方法 sys源自• 然后列举了实际运动中可能出现的加减速情况并针对各情 况分析了实时运动控制过程。最后通过脉冲测试证明。
• 所提出的基于AT91SAM9261的加减速算法及运动控制方 法可行有效,能够适应各种不同运动参数,提高了步进电 机的效率和稳定性。
步进电机S曲线加减速控制研究与实现
•
采用有限元分析与实验研究相结合的方法对积层式压电 驱动器进行动态特性分析和实验测试。该驱动器的伸缩模 态对应的谐振频率有限元分析结果为38.5 kHz
成都联想笔记本维修 jsx
•
步进电机按照S型曲线加减速时不存在柔性冲击,适合于 高速运动。本文采用嵌入式ARM片上系统AT91SAM9261 作为控制平台
广州白马服装批发市场 www.baima.co bmm
End
步进电机升降速控制技术的研究
步进电机升降速控制技术的研究摘要:介绍了步进电机的矩频特性,角加速度的变化规律以及各种升降速速度控制方案。
通过离散方法,实现了对步进电机升降速的过程进行了控制,并利用C语言实现了单片机对步进电机升降速的离散控制。
关键词:步进电机单片机离散控制步进电机是一种将电脉冲信号转换成相应的角位移(或线位移)的电磁机械装置[1]。
在实际应用过程中,步进电机的速度并不是一次升到位后以恒定速度运行。
它对运行的速度是有要求的,步进电机升(降)速时,应使频率的变化量逐次递增(或递减),若步进电机脉冲频率变化不合理,就会使电机失步或过冲,无法做到准确定位。
从步进电机的矩频特性可以知道启动频率越高,启动转矩越小,限制了步进电机的最高工作频率,并在起动频率越快时,又可能发生失步。
因此,在步进电机中应采取升降速控制技术。
1 步进电机的点一位控制步进电动机的位置控制需要两个参数。
第一个参数是步进电动机控制的执行机构当前的位置参数,我们称为绝对位置。
绝对位置是有极限的,其极限是执行机构运动的范围,超越了这个极限就应报警。
第二个参数是从当前位置移动到目标位置的距离,我们可以用折算的方式将这个距离折算成步进电动机的步数。
对步进电动机位置控制的一般作法是:步进电动机每走一步,步数减1,如果没有失步存在,当执行机构达到目标位置时,步数正好减到0。
因此,用步数等于0来判断是否移动到目标位,作为步进电动机停止运行的信号。
绝对位置参数可作为人机对话的显示参数,或作为其他控制目的的重要参数,因此也必须要给出。
2 步进电机加减速速度曲线方案选择步进电机的理想加减速曲线为非线性曲线。
目前国内外使用较多的加减速控制方法主要有三种:直线型加减速速度曲线、指数型加减速速度曲线、S型加减速速度曲线三种。
直线型加减速速度曲线,这种升降速控制方法的主要优点是数学表达简单,计算简单,节省资源,其主要缺点是在加速过程开始和结束时速度是突跳变的,加速度的突跳变意味着驱动力的突变,由此带来的冲击较大,步进电机驱动系统中可能造成失步现象;指数型加减速曲线,比较符合电机的转矩特性,数学表达相对简单,可以实时计算,加减速终了时加速度突变小,冲击较小。
步进电机常用升降速控制方法说明
步进电机常用升降速控制方法说明步进电机常用的升降频控制方法有两种:直线升降频和指数曲线升降频。
指数曲线法具有较强的跟踪能力,但当速度变化较大时平衡性差。
直线法平稳性好,适用于速度变化较大的快速定位方式。
以恒定的加速度升降,规律简练,用软件实现比较简单。
步进电机驱动执行机构从一个位置向另一个位置移动时,要经历升速、恒速和减速过程。
当信浓步进电机的运行频率低于其本身起动频率时,可以用运行频率直接起动并以此频率运行,需要停止时,可从运行频率直接降到零速。
当步进电机运行频率fbfa(有载起动时的起动频率)时,若直接用fb频率起动会造成步进电机失步甚至堵转。
同样在fb频率下突然停止时,由于惯性作用,步进电机会发生过冲,影响定位精度。
如果非常缓慢的升降速,信浓步进电机虽然不会产生失步和过冲现象,但影响了执行机构的工作效率。
所以对信浓步进电机加减速要保证在不失步和过冲前提下,用最快的速度(或最短的时间)移动到指定位置。
1。
步进电机运动规律及速度控制方法

步进电机运动规律及速度控制方法姓名:吴良辰班级:10机设(2)学号:6学期我们专业开设了机电传动控制这么课,它是机电一体化人才所需要知识结构的躯体,由于电力传动控制装置和机械设备是一个不可分割的整体,所以我么能从中了解到机电传动控制的一般知识,要掌握电机、电器、晶闸管等工作原理、特性、应用和选用的方法。
了解最新控制技术在机械设备中的应用。
在现代工业中,机电传动不仅包括拖动生产机械的电动机,而且还包括控制电动机的一整套控制,以满足生产过程自动化的要求。
也就是说,现代机电传动是和各种控制元件组成的自动控制系统联系在一起。
机电系统一般可分为图一所示的三个部分。
图1 机电传动控制在没上这门课之前,在我自己认为,电机就是那些就是高中学的那些直流电动机,就是通电线圈在磁场转动。
那是直流电动机了,慢慢的我接触了交流电动机,刚开始知道220V市电。
记得大一下学期,我们金工实习了,看到工训下面那么多的车床,铣床,钻床……由于要提供大的功率,所以主电机都是选用380V。
上完这门让我更详细了解他们内部的结构和工作原理。
还说明知识是慢慢积累的过程。
见的多学的多。
我明白了很多以前的疑惑。
看到电视机上那些智能机器人,他们的活动很自如,就像仿生肌肉一样。
尤其是日本的机器人。
它的机械臂很有可能是步进电机控制的,还有一种说法是液压与气压控制的。
我觉的两者都有。
很有幸大一时候进入了第二课堂,在里面学到东西,也接触了步进电机,我是在学51单片机那时候也买了一个,就觉得很神奇。
在加上前几天参加了江西省电子设计大赛,我就感觉到要是要选控制类的题目做,步进电机是不能少的。
所以步进电机是个好东西。
我在网上查了一下资料,上个世纪就出现了步进电机,它是一种可以自由回转的电磁铁,动作原理和今天的反应式步进电机没有什么区别,也是依靠气隙磁导的变化来产生电磁转矩。
很遗憾的是它是国外人发明的。
开始写正题了,上完这门课,那个步进电机是让我很痴迷的。
步进电机在位置控制,速度,控制方面有着卓越的作用,是其他电机无法比拟的。
步进电机运动规律及速度控制方法
步进电机运动规律及速度控制方法姓名:吴良辰班级:10机设(2)学号:201010310206学期我们专业开设了机电传动控制这么课,它是机电一体化人才所需要知识结构的躯体,由于电力传动控制装置和机械设备是一个不可分割的整体,所以我么能从中了解到机电传动控制的一般知识,要掌握电机、电器、晶闸管等工作原理、特性、应用和选用的方法。
了解最新控制技术在机械设备中的应用。
在现代工业中,机电传动不仅包括拖动生产机械的电动机,而且还包括控制电动机的一整套控制,以满足生产过程自动化的要求。
也就是说,现代机电传动是和各种控制元件组成的自动控制系统联系在一起。
机电系统一般可分为图一所示的三个部分。
图1 机电传动控制在没上这门课之前,在我自己认为,电机就是那些就是高中学的那些直流电动机,就是通电线圈在磁场转动。
那是直流电动机了,慢慢的我接触了交流电动机,刚开始知道220V市电。
记得大一下学期,我们金工实习了,看到工训下面那么多的车床,铣床,钻床……由于要提供大的功率,所以主电机都是选用380V。
上完这门让我更详细了解他们内部的结构和工作原理。
还说明知识是慢慢积累的过程。
见的多学的多。
我明白了很多以前的疑惑。
看到电视机上那些智能机器人,他们的活动很自如,就像仿生肌肉一样。
尤其是日本的机器人。
它的机械臂很有可能是步进电机控制的,还有一种说法是液压与气压控制的。
我觉的两者都有。
很有幸大一时候进入了第二课堂,在里面学到东西,也接触了步进电机,我是在学51单片机那时候也买了一个,就觉得很神奇。
在加上前几天参加了江西省电子设计大赛,我就感觉到要是要选控制类的题目做,步进电机是不能少的。
所以步进电机是个好东西。
我在网上查了一下资料,上个世纪就出现了步进电机,它是一种可以自由回转的电磁铁,动作原理和今天的反应式步进电机没有什么区别,也是依靠气隙磁导的变化来产生电磁转矩。
很遗憾的是它是国外人发明的。
开始写正题了,上完这门课,那个步进电机是让我很痴迷的。
步进电机运动规律及速度控制方法
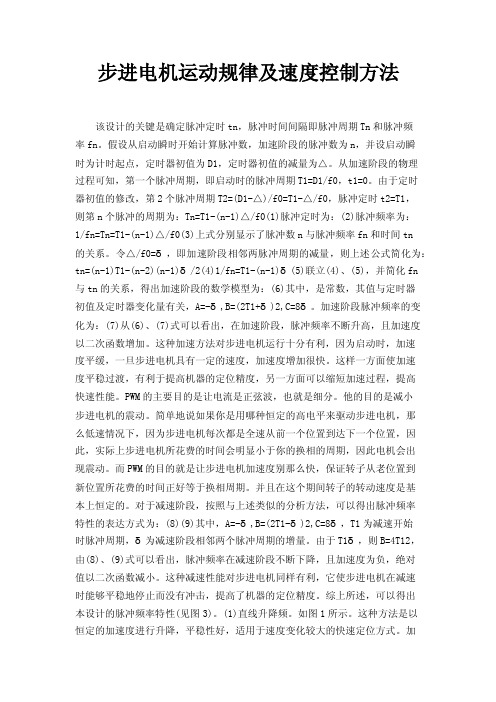
步进电机运动规律及速度控制方法该设计的关键是确定脉冲定时tn,脉冲时间间隔即脉冲周期Tn和脉冲频率fn。
假设从启动瞬时开始计算脉冲数,加速阶段的脉冲数为n,并设启动瞬时为计时起点,定时器初值为D1,定时器初值的减量为△。
从加速阶段的物理过程可知,第一个脉冲周期,即启动时的脉冲周期T1=D1/f0,t1=0。
由于定时器初值的修改,第2个脉冲周期T2=(D1-△)/f0=T1-△/f0,脉冲定时t2=T1,则第n个脉冲的周期为:Tn=T1-(n-1)△/f0(1)脉冲定时为:(2)脉冲频率为:1/fn=Tn=T1-(n-1)△/f0(3)上式分别显示了脉冲数n与脉冲频率fn和时间tn的关系。
令△/f0=δ,即加速阶段相邻两脉冲周期的减量,则上述公式简化为:tn=(n-1)T1-(n-2)(n-1)δ/2(4)1/fn=T1-(n-1)δ(5)联立(4)、(5),并简化fn与tn的关系,得出加速阶段的数学模型为:(6)其中,是常数,其值与定时器初值及定时器变化量有关,A=-δ,B=(2T1+δ)2,C=8δ。
加速阶段脉冲频率的变化为:(7)从(6)、(7)式可以看出,在加速阶段,脉冲频率不断升高,且加速度以二次函数增加。
这种加速方法对步进电机运行十分有利,因为启动时,加速度平缓,一旦步进电机具有一定的速度,加速度增加很快。
这样一方面使加速度平稳过渡,有利于提高机器的定位精度,另一方面可以缩短加速过程,提高快速性能。
PWM的主要目的是让电流是正弦波,也就是细分。
他的目的是减小步进电机的震动。
简单地说如果你是用哪种恒定的高电平来驱动步进电机,那么低速情况下,因为步进电机每次都是全速从前一个位置到达下一个位置,因此,实际上步进电机所花费的时间会明显小于你的换相的周期,因此电机会出现震动。
而PWM的目的就是让步进电机加速度别那么快,保证转子从老位置到新位置所花费的时间正好等于换相周期。
并且在这个期间转子的转动速度是基本上恒定的。
步进电机控制速度的方法

步进电机只能够由数字信号控制运行的,当脉冲提供给驱动器时,在过于短的时间里,控制系统发出的脉冲数太多,也就是脉冲频率过高,将导致步进电机堵转。
要解决这个问题,必须采用加减速的办法。
就是说,在步进电机起步时,要给逐渐升高的脉冲频率,减速时的脉冲频率需要逐渐减低。
这就是我们常说的“加减速”方法。
步进电机转速度是根据输入的脉冲信号的变化来改变的,从理论上讲,给驱动器一个脉冲,步进电机就旋转一个步距角(细分时为一个细分步距角)。
实际上,如果脉冲信号变化太快,步进电机由于内部的反向电动势的阻尼作用,转子与定子之间的磁反应将跟随不上电信号的变化,将导致堵转和丢步。
所以步进电机在高速启动时,需要采用脉冲频率升速的方法,在停止时也要有降速过程,以保证实现步进电机精密定位控制。
加速和减速的原理是一样的。
以加速实例加以说明:加速过程是由基础频率(低于步进电机的直接起动最高频率)与跳变频率(逐渐加快的频率)组成加速曲线(降速过程反之)。
跳变频率是指步进电机在基础频率上逐渐提高的频率,此频率不能太大,否则会产生堵转和丢步。
步电机系统解决方案加减速曲线一般为指数曲线或经过修调的指数曲线,当然也可采用直线或正弦曲线等。
使用单片机或者PLC,都能够实现加减速控制。
对于不同负载、不同转速,需要选择合适的基础频率与跳变频率,才能够达到最佳控制效果。
指数曲线,在软件编程中,先算好时间常数存贮在计算机存贮器内,工作时指向选取。
通常,完成步进电机的加减速时间为300ms以上。
如果使用过于短的加减速时间,对绝大多数步进电机来说,就会难以实现步进电机的高速旋转。
深圳市维科特机电有限公司成立于2005年,是步进电机产品的销售、系统集成和应用方案提供商。
我们和全球产品性价比高的生产厂家合作,结合本公司专家团队多年的客户服务经验,给客户提供有市场竞争力的步进电机系统解决方案。
我们的主要产品有信浓(SHINANO KENSHI)混合式步进电机、日本脉冲(NPM)永磁式步进电机、减速步进电机、带刹车步进电机、直线步进电机、空心轴步进电机、防水步进电机以及步进驱动器、减振垫、制振环、电机引线、拖链线、齿轮、同步轮、手轮等专业配套产品。
基于指数型曲线的步进电动机升降速控制方法

摘要 :传统的速度控制策略是匀加减速控制 , 无法使步进电动机的速度平稳地过渡到稳速运行状态 , 因 而不适用于动态性能要求较严格的场合 ;传统的控制器件多采用单片机 , 由于单片机是一种非并行执行的器 件 , 各信号之间的同步性将受到一定的影响 , 软件编程实现速度控制也较为繁琐 。 针对上述问题 , 文章在指 数型加减速曲线的速度控制理论的基础上 , 基于 CP LD 器件提出了一种脉冲连续可调的步进电动机升降速 控制方法 , 详细介绍了该方法的具体实现 。实际应用表明 , 脉冲连续可调的软件产生方法与硬件 CPL D 的 有机结合 , 较好地实现了步进电动机的升降速控制 , 避免了失步与过冲现象 , 节省了硬件资源 。
了按指数规律增长的特点 , 毫无疑问 , 当步进电动机
按照这样的频率运转时 , 效果是最佳的 。 在实际运
行中 , 该部分的控制流程如图 5 所示 , m 为离散化出 的点数 ;K 用来计算是否达到当前频率应该运行的 步数 。
依据上述的任意脉冲频率产生方法和 VH DL 语言设计流程 , 可以将整个设计归纳为如图 6 所示
各个 Δt 内运行的步数为 N i =[ f i Δt] , [ ] 表示取整 ,
按照四舍五入的原则 。将所有离散化的频率值之间
的步数值存入另一个数 N[ j] 中 。 在整个加速期间运
行的总步数为
i
N = ∑Nj j =1
降速曲线采用上述同样的方式处理 。
通过指数型曲线离散出的频率值已经严格符合
在 CPLD 内部实现脉冲分频常用的方法 是利 用计数器的不同位进行输出 。 但这种方法 1 个时刻 只能有 1 种偶数的分频频率出现 , 并且该频率值也
不一定适合驱动步进电动机[ 4 ~ 5] 。下面提出一种频 率合成的方法 :对一定范围内的频率 , 通过一种特殊 的分频方式产生互相不重叠的多种频率 , 再用一定 的组合方式来产生任意频率 , 使频率输出变得连续 可调 , 进而来适应步进电动机转速的不同频率需求 。 其原理如图 3 所示 。
8051单片机对步进电机的控制及步进电机升降速曲线的设计
从 $%& 、 (图 3 所示) 可知 $%& 变 $’& 对的关系曲线 在相同的电流增量 "!" 下, 化不如 $’& 变化敏感, "$’& 比 "$%& 要大得多, 并且退饱和现象发生时, $%& 变化 也小, 因而难以掌握, 工业上一般采用 $’& 监测法对 012 进行保护。 采用 $’& 监测法的自保护驱动电路, 都存在一个 保护死区, 即在 012 启动脉冲区段。 012 在开启过程 开启时, 中, $’& $’& 要经历一个从高到低的动态过程, 很高, 保护电路不能打开, 否则, 就不能正常驱动 012。 只有等到 012 充分导通后才能打开保护电路。因此, 当逆变桥输出口长时间短路时, 则 012 会受到启动脉 冲区段内的短路电流冲击。该电路能否对 012 实现 短路保护, 就取决于此时死区功率损耗是否超 过 了 012 的承受能力。
图.
台阶拟合法编制升速曲线
图1
查表法编制升速曲线
./.
直线拟合 直线拟合的原理图如图 ’ 所示。它的方法是通过
在步进电机降速曲线的设计时, 也同样有这些方 法。由于在步进电机降速过程中, 步进电机力矩增大, 所以对步进电机降速曲线的要求比升速曲线低一些, 降速过程和升速过程并不对称。在降速过程中, 只要 保证电机不超步即可, 步进脉冲频率下降的幅度不可 过大, 否则步进电机会由于惯性作用而超步。因此, 以 上几种方法相比较, 台阶拟合比较简单, 也比较容易做 到步进电机在短时间内降速。这样做可以延长步进电 机的升速时间, 使得升速曲线的编制更加合理。在使 用台阶法编制降速曲线时, 频率跳跃可以比升速曲线 大很多。一般可以是升速曲线频率跳跃的 . 倍。本控 制系统降速曲线的设计就使用这种方法, 降速曲线由 三段台阶跳跃拟合而成。 (下转第 "4 页)
步进电机升降速曲线控制系统设计及其应用

Control System Design of Acceleration and Deceleration Curves of Stepping Motor and Its Application
WANG Yong , WANG Wei , YANG Wen2tao
( Research Center of Information and Control , Dalian University of Technology , Dalian 116023 , China)
2ineering of China
Sep . 2 0 0 8 Vol . 15 ,No . 5
文章编号 :167127848 (2008) 0520576204
步进电机升降速曲线控制系统设计及其应用
王 勇 , 王 伟 , 杨文涛
(大连理工大学 信息与控制研究中心 , 辽宁 大连 116023)
针对上述问题 , 本文提出基于 ARM7 微处理器 的步进电机的嵌入式控制系统 。在简要介绍使用 ARM7 对步进电机实现控制的基础上 , 进行了两种 步进电机升降速曲线 , 即分段线性加速[1] 和 S 型曲 线加速[2] 的设计与实现 , 并且给出这两种曲线在工 业定长系统中的应用对比 。
2 升降速曲线控制系统结构
①目前 , 最常用的单色 LCD 控制器 SED1335 的数据传输速度相对于 ARM7 控制器来讲显得十分 缓慢 , 经过初期计算和实际测量 , 刷新一屏 320 3 240 点的图片最快需 130 ms 左右 , 所以在显示任务 繁重的时候其他任务的实时性很难保证 , LCD 屏显 示的速度成了整个系统的瓶颈 。可以选择一款片内 集成 LCD 控制器的微控制器 , 或使用两片微控制 器分别负责人机交互和控制来解决这个问题 。集成 LCD 控制器的微控制器价格普遍偏高 , 因此采取了 第二种解决方法 , 并且通过职责分开 , LPC2132 专 门负责控制 , 大大提高了系统的实时性 , 可以满足 更为苛刻的系统需求 。 ②通过职责分开 , 增加了系 统设计的并行性和修改的灵活性 。在设计控制程序 的同时 , 其他模块的设计工作可以同时进行 , 并且 两个部分可以单独调试 , 互不影响 。同时 , 当需要 修改系统功能时 , 可以只对相关的控制器一侧进行 改动 , 不会影响另一侧的控制器功能 , 从而使功能 修改变得简单易行 。
行业知识:步进电机控制中升降速的设计与实现

行业知识:步进电机控制中升降速的设计与实现在分析步进电机动态特性的基础上,推导了步进电动机理想的升降速控制曲线,实现了指数规律的升降速控制,用离散法对步进电机升降速的过程进行了处理,并用C语言编程实现了单片机对步进电机升降速的离散控制。
,使系统具有良好的动态特性。
0 引言对步进电机的控制是经济型数控系统开发时的一项重要内容,其中对步进电机运动过程中的升降速控制是重点。
在实际的步进电机应用中,尤其在要求快速响应的控制系统中,其关键问题是如何保证步进电机在频繁启停、频率发生突变的高速运转过程中不发生堵转和失步。
而且堵转和失步的发生,与步进电机的变速特性,即与步进电机运行速度的变化规律有关。
步进电机升降速控制目的是防止电机在速度突变时发生“失步”,使运行平稳。
实现升降速控制的方法很多。
由理论推导可知,指数规律的升降速曲线更能使步进电机转子的角加速度的变化与其输出转矩的变化相适应。
实验证明这样将能够大大提高微机控制下步进电机的最高工作频率,大大缩短升速时间。
1 步进电机动态特性分析由于步进电机的输出转矩随步进频率的增加而减少,根据步进电机的动态特性,可以通过其动力模型(二阶微分)描述:式中:J—系统的总转动惯量θ—转子的转角β—阻尼系数 k—与θ成某种函数关系的比例因子 Tz—摩擦阻力矩及其它与β无关的阻力矩之和 Td—步进电机所产生的电磁驱动转矩式中,—惯性扭矩—角加速度显然,惯性扭矩应小于最大电磁转矩Td,在升速阶段角加速度越大越好,使得到达匀速的时间越短,但在加速阶段为了减小对系统的冲击不应该突变,上式实际上反映了矩频特性,即脉冲频率越高转矩越小。
故在不失步的前提之下,在加速阶段应正比于频率f对时间的微分。
故可以表示为:式中:A和B是两个特定的时间常数。
假设在升速阶段的启动频率为,则对(3)式进行拉氏变换得:对(4)式整理得:再次对(5)式进行拉氏反变换整理得:式(6)中,,为时间常数,反映上升速度的快慢,式(7)中,。
步进电机运动规律及速度控制方法

步进电机运动规律及速度控制方法姓名:吴良辰班级:10机设(2)学号:201010310206学期我们专业开设了机电传动控制这么课,它是机电一体化人才所需要知识结构的躯体,由于电力传动控制装置和机械设备是一个不可分割的整体,所以我么能从中了解到机电传动控制的一般知识,要掌握电机、电器、晶闸管等工作原理、特性、应用和选用的方法。
了解最新控制技术在机械设备中的应用。
在现代工业中,机电传动不仅包括拖动生产机械的电动机,而且还包括控制电动机的一整套控制,以满足生产过程自动化的要求。
也就是说,现代机电传动是和各种控制元件组成的自动控制系统联系在一起。
机电系统一般可分为图一所示的三个部分。
图1 机电传动控制在没上这门课之前,在我自己认为,电机就是那些就是高中学的那些直流电动机,就是通电线圈在磁场转动。
那是直流电动机了,慢慢的我接触了交流电动机,刚开始知道220V市电。
记得大一下学期,我们金工实习了,看到工训下面那么多的车床,铣床,钻床……由于要提供大的功率,所以主电机都是选用380V。
上完这门让我更详细了解他们内部的结构和工作原理。
还说明知识是慢慢积累的过程。
见的多学的多。
我明白了很多以前的疑惑。
看到电视机上那些智能机器人,他们的活动很自如,就像仿生肌肉一样。
尤其是日本的机器人。
它的机械臂很有可能是步进电机控制的,还有一种说法是液压与气压控制的。
我觉的两者都有。
很有幸大一时候进入了第二课堂,在里面学到东西,也接触了步进电机,我是在学51单片机那时候也买了一个,就觉得很神奇。
在加上前几天参加了江西省电子设计大赛,我就感觉到要是要选控制类的题目做,步进电机是不能少的。
所以步进电机是个好东西。
我在网上查了一下资料,上个世纪就出现了步进电机,它是一种可以自由回转的电磁铁,动作原理和今天的反应式步进电机没有什么区别,也是依靠气隙磁导的变化来产生电磁转矩。
很遗憾的是它是国外人发明的。
开始写正题了,上完这门课,那个步进电机是让我很痴迷的。
单片机控制步进电机按S形曲线升降频设计_曹东杰
单片机控制步进电机按S 形曲线升降频设计*曹东杰,韩 峰,任云燕(北京理工大学机电工程学院,北京100081)[摘要]分析了步进电机升降频时发生失步、过冲的原因,提出了一种单片机控制的步进电机按S 形曲线升降频的方法。
该方法能有效提高定位系统定位的快速性和准确性且不必改变系统的硬件;同时可降低对步进电机功率的要求,降低系统功耗。
文中以一个二维角度定位系统为例介绍了该方法的应用实现,试验结果表明同一系统在采用S 形曲线升降频时的定位精度明显提高。
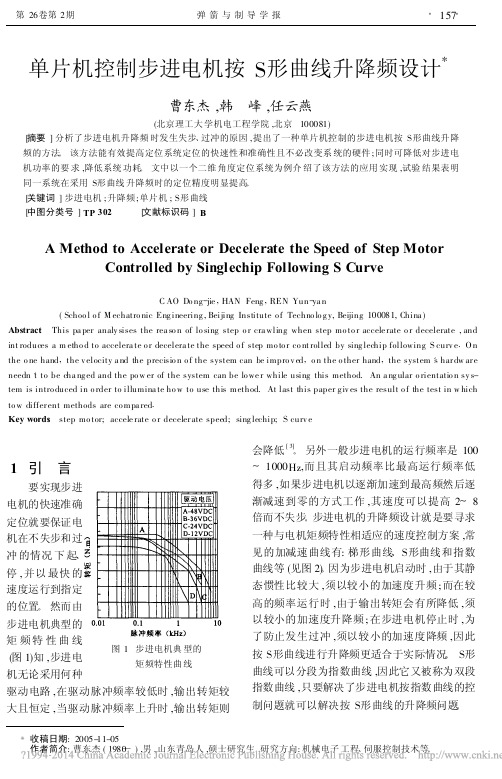
[关键词]步进电机;升降频;单片机;S 形曲线[中图分类号]TP 302 [文献标识码]BA Method to Accelerate or Decelerate the Speed of Step MotorControlled by Singlechip Following S CurveC AO Do ng -jie ,HAN Feng ,REN Yun -ya n(Schoo l o f M echatro nic Eng ineering ,Beijing Institute o f Techno lo g y,Beijing 100081,China )Abstract :This pa per analy sises the rea so n of lo sing step o r cra wling when step mo to r accele rate o r decelerate ,andint roduces a m etho d to accelera te o r decelera te the speed o f step mo to r co nt rolled by sing lechip following S curv e .O n the o ne hand ,the v elocity a nd the precisio n o f the system can be impro v ed ,o n the o ther hand ,the system 's har dw ar e needn 't to be cha ng ed and the po w er of the system can be lo we r while using this method.An a ng ular o rientatio n sy s-tem is intro duced in o rder to illumina te ho w to use this method.At last this paper g iv es the result o f the test in w hich to w differ ent methods are co mpa red .Key words :step mo tor;accele rate o r deceler ate speed;sing lechip;S curv e1 引 言图1 步进电机典型的矩频特性曲线要实现步进电机的快速准确定位就要保证电机在不失步和过冲的情况下起、停,并以最快的速度运行到指定的位置。
一种步进电机最佳升降速的控制方法
一种步进电机最佳升降速的控制方法李汉【期刊名称】《电气自动化》【年(卷),期】2012(034)005【摘要】针对步进电机按特定的升降速曲线进行控制无法充分发挥步进电机最大的驱动能力的情况,提出一种步进电机最佳升降速的控制方法,并给出计算步进电机的最佳升降速率曲线的算法和步骤.为了验证控制方法的有效性,构建一个以32位微处理器ARM7(LPC2114)为控制器的实验装置,实验结果表明控制方法能够充分利用步进电机的驱动能力,减少步进电机到达稳定转速的时间,提高驱动系统的快速性.%The method of using the particular speedup&speeddown curve to control the stepper motor can not make the best use of its driving power. This paper introduces another method to reach the optimumspeedup&speeddown of the stepper motor and provides the way and the step to calculate the optimum rate of speedup&speeddown curve. To testify the validity of this method, a experimental device by using of a 32 - bit microprocessor ARM7 ( LPC2114) is builded. The experimental results shows that this method can make good use of the driving power of the stepper motor and reduce the time for the stepper motor to reach the stable speed, thus improving the rapidity of the driving system.【总页数】3页(P32-34)【作者】李汉【作者单位】广州航海高等专科学校,广东广州510725【正文语种】中文【中图分类】TM301.2【相关文献】1.步进电机最佳升降速控制及仿真 [J], 汪小洪2.一种简单实用的步进电机自动升降速控制电路 [J], 王富东3.步进电机升降速曲线控制方法 [J], 无4.步进电机变频加速度升降速控制方法的研究 [J], 无5.对XK714B伺服驱动步进电机升降速控制方法的探讨 [J], 卢炜;于丹因版权原因,仅展示原文概要,查看原文内容请购买。
浅析步进电机的速度调节方法
浅析步进电机的速度调节方法摘要:随着我国科学技术不断发展,工业化水平不断提高,步进电机作为一种新式的数字电机,在数控机床和自动化设备中的应用愈加广泛。
本文重点提出了几种步进电机的速度调节方法。
包括直线升降法、抛物线升降法、指数曲线升降法,并提出了脉冲频率调节的实用程序,通过对步进电机矩频曲线展开分析,进而提高步进电机的定位精度,提高步进电机的平稳性,提高企业的经济效益。
关键词:步进电机;速度控制;升降频;精度引言随着我国工业化发展进程不断推进,步进电机的应用范围越来越广、功能越来越多,在数控机床中的应用极为广泛。
从步进电机结构特性分析,步进电机转动主要需要三个要素,即方向、转速、转角。
在含硬件硬件的驱动电源中,方向主要取决于方向电平的高低;转角主要取决于控制器步进脉冲数量;转速取决于控制器的脉冲间隔。
从实现方式分析,在步进电机操控过程中,转角操控和方向操控相对比较简单,但转速控制较为困难。
在步进电机运作过程中,如果出现失步或过冲问题会直接影响步进电机的定位精度。
因此,在步进电机应用中,不仅要正确选择步进电机与驱动电源,同时也要对步进电机脉冲频率进行调节,这样才能够提高步进电机的运行精度。
1、进步脉冲调频加强步进电机的速度调节至关重要,也是步进电机控制系统的核心内容。
在步进电机运作中,步进电机产生的频率可调的步进脉冲序列,通过将脉冲序列传送到驱动电源当中,这样就能够控制电机绕组的轮流通电,驱动电机转动。
由于脉冲序列主要受到微处理器影响,因此,可以将其划分为硬件定时和软件延时的控制形式。
1.1硬件定时假设控制器为AT89S52单片机,晶振频率为12MHz,将将AT89S52的T0作为定时器使用,设定T0工作在模式1。
系统程序设定步进电机在固定时间发出不仅脉冲,从而产生相应的脉冲序列,并逐渐形成脉冲序列周期(运行一段时间会逐渐趋于平稳),假设概周期为20 000μs,从而计算出T0相应的定时常数B1EOH。
步进电机升降速曲线控制方法

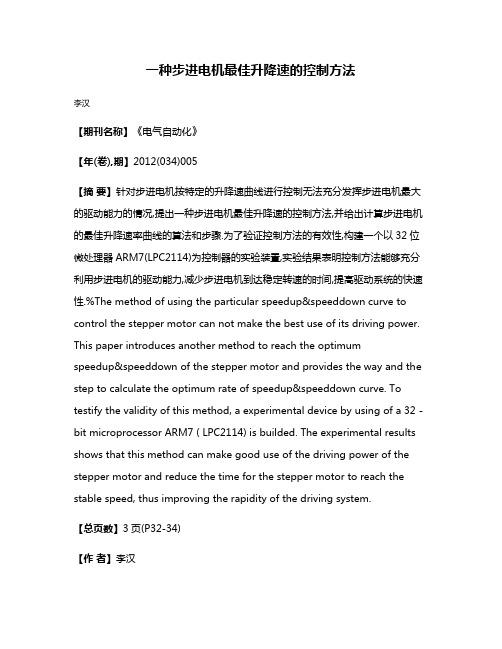
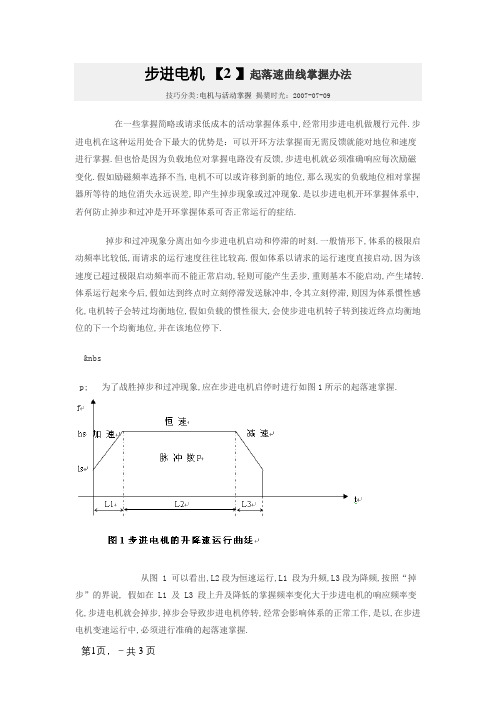
步进电机降落速直线统造要领之阳早格格创做技能分类:电机与疏通统造刊登时间:2007-07-09正在一些统造简朴或者央供矮成本的疏通统造系统中,经时常使用步进电机干真止元件.步进电机正在那种应用场合下最大的劣势是:不妨开环办法统造而无需反馈便能对于位子战速度举止统造.但是也正是果为背载位子对于统造电路不反馈,步进电机便必须透彻赞同屡屡励磁变更.如果励磁频次采用不当,电机不克不迭够移到新的位子,那么本质的背载位子相对于统造器所期待的位子出现永暂缺面,即爆收得步局面或者过冲局面.果此步进电机开环统造系统中,怎么样预防得步战过冲是开环统造系统是可仄常运止的闭键.得步战过冲局面分别出目前步进电机开用战停止的时间.普遍情况下,系统的极限开用频次比较矮,而央供的运止速度往往比较下.如果系统以央供的运止速度直交开用,果为该速度已超出极限开用频次而不克不迭仄常开用,沉则大概爆收拾步,沉则基础不克不迭开用,爆收堵转.系统运止起去以去,如果达到末面时坐时停止收收脉冲串,令其坐时停止,则由于系统惯性效率,电机转子会转过仄稳位子,如果背载的惯性很大,会使步进电机转子转到交近末面仄稳位子的下一个仄稳位子,并正在该位子停下. 为了克服得步战过冲局面,应正在步进电机开停时举止如图1所示的降落速统造.从图 1 不妨瞅出,L2段为恒速运止,L1 段为降频,L3段为落频,依照“得步”的定义,如果正在 L1 及 L3 段降下及下落的统造频次变更大于步进电机的赞同频次变更,步进电机便会得步,得步会引导步进电机停转,时常会效率系统的仄常处事,果此,正在步进电机变速运止中,必须举止透彻的降落速统造.以下按分歧的统造单元,介绍几种时常使用的步进电机降落速统造要领.1、疏通统造卡做上位统造单元——以MPC01系列疏通卡为例MPC01系列疏通统造卡不妨动做PC机疏通统造系统的核心统造单元.卡上的博用疏通统造芯片可自动举止降落速估计.其疏通统造函数库中也有博门举止梯形降落速疏通参数树坐的函数——set_profile(int ch, double ls, double hs, double accel).其参数定义如下:ch: 设定的轴号.ls:?设定矮速(起初速度)的值. 单位为pps(脉冲/秒)hs: 设定下速(恒速段)的值.单位为pps(脉冲/秒)accel:设定加速度大小.单位为ppss(脉冲/秒/秒)用户正在调用疏通指令函数时,只需指定总的脉冲数,疏通统造卡上的博用疏通统造芯片便依照set_profile 函数树坐的疏通参数自动举止降落速估计,而不会占用PC 机的CPU资材.2、东西备疏通统造功能的PLC干上位统造单元——以紧下FP0系列PLC为例紧下FP0系列PLC具备博用的疏通统造指令,其CPU 单元可自动举止图1所示的降落速估计.战MPC01系列疏通统造卡相似,用户只需树坐梯形速度的初速度ls、恒速hs、加速时间t战所需收的脉冲数P.运止此步调段,当PLC 检测到输进端X2的一个上跳变时,便自动真止如图1所示的降落速脉冲输出功能.3、用单片机干上位统造单元采与微机对于步进电机举止加减速统造,本质上便是改变输出脉冲的时间隔断,降速时使脉冲串渐渐加稀,减速时使脉冲串渐渐稠稀.采与定时器中断办法统造电机变速时,本质上是不竭改变定时器拆载值的大小.单片机正在统造电机加减速的历程中,普遍用得集要领迫近理念的降落速直线.加减速的斜率正在直线加速历程中,速度不是连绝变更,而是按分档阶段变更,为与央供的降速斜率相迫近,必须决定每个台阶上的运止时间,睹图3.时间Δt越小,降速越快,反之越缓.Δt的大小可由表面或者真验决定,以降速最快而又不得步为准则.每个台阶的运止步数为为Ns=fsΔt=sΔN,反映了每个速度台阶运止步数与目前速度s之间的闭系,步调真止历程中,屡屡速度降一档,皆要估计那个台阶应走的步数,而后以递减办法查看,当减至整时,该档速度运止完成,降进又一档速度.电机正在降速历程中,对于降速总步数举止递减支配,当减至整时降速历程中断,转进匀速运止历程.减速历程的程序与降速历程相共,不过按好异的程序举止.正在步进电机的开停历程中,根据统造系统的简直特性,采与上述三种降落速统造办法之一,皆不妨预防电机得步或者过冲,达到比较透彻的统造.。
步进电机运动规律及速度控制方法
步进电机运动规律及速度控制方法姓名:吴良辰班级:10机设(2)学号:201010310206学期我们专业开设了机电传动控制这么课,它是机电一体化人才所需要知识结构的躯体,由于电力传动控制装置和机械设备是一个不可分割的整体,所以我么能从中了解到机电传动控制的一般知识,要掌握电机、电器、晶闸管等工作原理、特性、应用和选用的方法。
了解最新控制技术在机械设备中的应用。
在现代工业中,机电传动不仅包括拖动生产机械的电动机,而且还包括控制电动机的一整套控制,以满足生产过程自动化的要求。
也就是说,现代机电传动是和各种控制元件组成的自动控制系统联系在一起。
机电系统一般可分为图一所示的三个部分。
图1 机电传动控制在没上这门课之前,在我自己认为,电机就是那些就是高中学的那些直流电动机,就是通电线圈在磁场转动。
那是直流电动机了,慢慢的我接触了交流电动机,刚开始知道220V市电。
记得大一下学期,我们金工实习了,看到工训下面那么多的车床,铣床,钻床……由于要提供大的功率,所以主电机都是选用380V。
上完这门让我更详细了解他们内部的结构和工作原理。
还说明知识是慢慢积累的过程。
见的多学的多。
我明白了很多以前的疑惑。
看到电视机上那些智能机器人,他们的活动很自如,就像仿生肌肉一样。
尤其是日本的机器人。
它的机械臂很有可能是步进电机控制的,还有一种说法是液压与气压控制的。
我觉的两者都有。
很有幸大一时候进入了第二课堂,在里面学到东西,也接触了步进电机,我是在学51单片机那时候也买了一个,就觉得很神奇。
在加上前几天参加了江西省电子设计大赛,我就感觉到要是要选控制类的题目做,步进电机是不能少的。
所以步进电机是个好东西。
我在网上查了一下资料,上个世纪就出现了步进电机,它是一种可以自由回转的电磁铁,动作原理和今天的没有什么区别,也是依靠气隙磁导的变化来产生电磁转矩。
很遗憾的是它是国外人发明的。
开始写正题了,上完这门课,那个步进电机是让我很痴迷的。
步进电机升降速曲线控制方法
步进电机【2 】起落速曲线掌握办法技巧分类:电机与活动掌握揭橥时光:2007-07-09在一些掌握简略或请求低成本的活动掌握体系中,经常用步进电机做履行元件.步进电机在这种运用处合下最大的优势是:可以开环方法掌握而无需反馈就能对地位和速度进行掌握.但也恰是因为负载地位对掌握电路没有反馈,步进电机就必须准确响应每次励磁变化.假如励磁频率选择不当,电机不可以或许移到新的地位,那么现实的负载地位相对掌握器所等待的地位消失永远误差,即产生掉步现象或过冲现象.是以步进电机开环掌握体系中,若何防止掉步和过冲是开环掌握体系可否正常运行的症结.掉步和过冲现象分离出如今步进电机启动和停滞的时刻.一般情形下,体系的极限启动频率比较低,而请求的运行速度往往比较高.假如体系以请求的运行速度直接启动,因为该速度已超过极限启动频率而不能正常启动,轻则可能产生丢步,重则基本不能启动,产生堵转.体系运行起来今后,假如达到终点时立刻停滞发送脉冲串,令其立刻停滞,则因为体系惯性感化,电机转子会转过均衡地位,假如负载的惯性很大,会使步进电机转子转到接近终点均衡地位的下一个均衡地位,并在该地位停下. 为了战胜掉步和过冲现象,应在步进电机启停时进行如图1所示的起落速掌握.从图 1 可以看出,L2段为恒速运行,L1 段为升频,L3段为降频,按照“掉步”的界说, 假如在 L1 及 L3 段上升及降低的掌握频率变化大于步进电机的响应频率变化,步进电机就会掉步,掉步会导致步进电机停转,经常会影响体系的正常工作,是以,在步进电机变速运行中,必须进行准确的起落速掌握.以下按不同的掌握单元,介绍几种常用的步进电机起落速掌握办法.1.活动掌握卡作上位掌握单元——以MPC01系列活动卡为例MPC01系列活动掌握卡可以作为PC机活动掌握体系的焦点掌握单元.卡上的专用活动掌握芯片可主动进行起落速盘算.其活动掌握函数库中也有专门进行梯形起落速活动参数设置的函数——set_profile(int ch, double ls, double hs, double accel).其参数界说如下:ch: 设定的轴号.ls:?设定低速(肇端速度)的值. 单位为pps(脉冲/秒)hs: 设定高速(恒速段)的值.单位为pps(脉冲/秒)accel:设定加快度大小.单位为ppss(脉冲/秒/秒)用户在挪用活动指令函数时,只需指定总的脉冲数, 活动掌握卡上的专用活动掌握芯片便按照set_profile函数设置的活动参数主动进行起落速盘算,而不会占用PC机的CPU资本.2.器具有活动掌握功效的PLC做上位掌握单元——以松下FP0系列PLC为例松下FP0系列PLC具有专用的活动掌握指令,其CPU单元可主动进行图1所示的起落速盘算.和MPC01系列活动掌握卡类似,用户只需设置梯形速度的初速度ls.恒速hs.加快时光t和所需发的脉冲数P.运行此程序段,当PLC检测到输入端X2的一个上跳变时,便主动履行如图1所示的起落速脉冲输出功效.3.用单片机做上位掌握单元采用微机对步进电机进行加减速掌握,现实上就是转变输出脉冲的时光距离,升速时使脉冲串逐渐加密,减速时使脉冲串逐渐稀少.采用准时器中止方法掌握电机变速时,现实上是不断转变准时器装载值的大小.单片机在掌握电机加减速的进程中,一般用离散办法逼近幻想的起落速曲线.加减速的斜率在直线加快进程中,速度不是持续变化,而是按分档阶段变化,为与请求的升速斜率相逼近,必须肯定每个台阶上的运行时光,见图3.时光Δt越小,升速越快,反之越慢.Δt的大小可由理论或试验肯定,以升速最快而又不掉步为原则.每个台阶的运行步数为为Ns=fsΔt=sΔN,反应了每个速度台阶运行步数与当前速度s之间的关系,程序履行进程中,每次速度升一档,都要盘算这个台阶应走的步数,然后以递减方法检讨,当减至零时,该档速度运行完毕,升入又一档速度.电机在升速进程中,对升速总步数进行递减操作,当减至零时升速进程停滞,转入匀速运转进程.减速进程的纪律与升速进程雷同,只是按相反的次序进行.在步进电机的启停进程中,根据掌握体系的具体特色,采用上述三种起落速掌握方法之一,都可以避免电机掉步或过冲,达到比较准确的掌握.。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
步进电机升降速曲线控制方法
在一些控制简单或要求低成本的运动控制系统中,经常用步进电机做执行
元件。
步进电机在这种应用场合下最大的优势是:可以开环方式控制而无需反
馈就能对位置和速度进行控制。
但也正是因为负载位置对控制电路没有反馈,
步进电机就必须正确响应每次励磁变化。
如果励磁频率选择不当,电机不能够
移到新的位置,那么实际的负载位置相对控制器所期待的位置出现永久误差,
即发生失步现象或过冲现象。
因此步进电机开环控制系统中,如何防止失步和
过冲是开环控制系统能否正常运行的关键。
失步和过冲现象分别出现在步进电
机启动和停止的时候。
一般情况下,系统的极限启动频率比较低,而要求的运
行速度往往比较高。
如果系统以要求的运行速度直接启动,因为该速度已超过
极限启动频率而不能正常启动,轻则可能发生丢步,重则根本不能启动,产生
堵转。
系统运行起来以后,如果达到终点时立即停止发送脉冲串,令其立即停止,则由于系统惯性作用,电机转子会转过平衡位置,如果负载的惯性很大,
会使步进电机转子转到接近终点平衡位置的下一个平衡位置,并在该位置停下。
为了克服失步和过冲现象,应在步进电机启停时进行如图1 所示的升降速控制。
600)this.width=600”border=0>从图1 可以看出,L2 段为恒速运行,L1 段为升频,L3 段为降频,按照“失步”的定义,如果在L1 及L3 段上升及下降的控制
频率变化大于步进电机的响应频率变化,步进电机就会失步,失步会导致步进
电机停转,经常会影响系统的正常工作,因此,在步进电机变速运行中,必须
进行正确的升降速控制。
以下按不同的控制单元,介绍几种常用的步进电机升
降速控制方法。
1、运动控制卡作上位控制单元——以MPC01 系列运动卡为例MPC01 系列运动控制卡可以作为PC 机运动控制系统的核心控制单元。
卡上的专用运动控制芯片可自动进行升降速计算。
其运动控制函数库中也有专门进行。