基于Android的无线智能寻物系统的研究与开发_王维樵
《2024年基于ZigBee技术的无线数据采集系统研究与设计》范文

《基于ZigBee技术的无线数据采集系统研究与设计》篇一一、引言随着物联网技术的快速发展,无线数据采集系统在各个领域的应用越来越广泛。
ZigBee技术作为一种低功耗、低成本、低复杂度的无线通信技术,在无线数据采集系统中得到了广泛应用。
本文旨在研究并设计一个基于ZigBee技术的无线数据采集系统,以实现对各类数据的快速、准确、可靠采集和传输。
二、系统概述基于ZigBee技术的无线数据采集系统主要由传感器节点、协调器以及上位机三部分组成。
传感器节点负责数据的采集和初步处理,通过ZigBee无线通信技术与协调器进行数据传输。
协调器负责接收传感器节点的数据,并将其通过有线或无线网络传输至上位机进行进一步处理和分析。
三、传感器节点设计传感器节点是无线数据采集系统的核心部分,其设计直接影响到系统的性能和稳定性。
传感器节点主要包括传感器模块、微控制器模块、ZigBee无线通信模块以及电源模块。
传感器模块负责数据的采集,可根据实际需求选择不同类型的传感器。
微控制器模块负责协调传感器模块和ZigBee无线通信模块的工作,并对数据进行初步处理。
ZigBee无线通信模块负责与协调器进行数据传输。
电源模块为整个节点提供稳定的电源。
四、协调器设计协调器是连接传感器节点和上位机的桥梁,其设计同样重要。
协调器主要包括ZigBee无线通信模块、数据处理模块以及与上位机的接口模块。
ZigBee无线通信模块负责接收传感器节点的数据。
数据处理模块对接收到的数据进行进一步处理,如滤波、去噪等。
与上位机的接口模块负责将处理后的数据传输至上位机进行进一步的分析和处理。
五、系统实现系统实现主要包括硬件设计和软件设计两部分。
硬件设计主要包括传感器节点和协调器的电路设计、元器件选型等。
软件设计主要包括传感器节点的数据采集和处理程序、ZigBee无线通信程序以及协调器的数据处理程序和与上位机的通信程序。
在硬件设计方面,需根据实际需求选择合适的元器件,并设计合理的电路以保证系统的稳定性和可靠性。
无线短距离寻物系统的设计与研究
( 成都 大学 电子信息工程学院 ,成都 6 0 0 ) 1 16
摘 要 :目前 ,各类物品都 趋于小型化 ,而寻找小 物体 常常给人们的生活带来不便 ,本 文介绍了一种基
块 接 收 并 检 测 出 相应 的信 号 ,并 以 声 光提 示 。 系
●
统 框 图如 图1 图2 和 所示 。
蓑 S 85 C 篓 T 92 CCR
图 2 接 收 器 电路 框 图
蜂鸣器 ( 发声 ) 二极管 ( 发光 )
。
— ; 一 豢 奸 J 。
一
11 发 射器 电路 设计 .
- L 午
发 射器 电路 由S C 9 2 C 片机构 成最 小 系 T 8 C5 R 单 曩
统 ,P1 口接 两 个 按 键来 控 制 信 号 的发 送 与 否 ;P 0
口接 一位 共 阳极 数 码管 ,P 口连接 C 0 线发 2 C1 0 无 1
器 发 声 和发 光 二极 管发 光 ,以提 示 用 户找 到 该 物 体 ,电路 如图4 示 。 所
组 成 ,发 射程 序 与接 收程 序 基本 相 似, 只是在 接 收 程 序 中添 加 了驱 动蜂 呜 器 和 发光 二 极管 的驱 动程
序 ,发射和 接收程 序 框如 图5 图6 和 所示 。
6.
【】黄 智 伟 . 片 机 无 线 收发 集 成 电路 原 理 与 应 用 【 . 民 3 单 M] 人 邮 电 出 版社 , 0 . 2 5 0
【】李 全 利 , 荣 强 . 片 机 原 理 及 接 口技 术 . . 等 教 育 出 4 迟 单 【 高 M】
基于Android平台的智能蓝牙防丢器的设计
基于Android平台的智能蓝牙防丢器的设计作者:陈菁李昱钊来源:《数字技术与应用》2018年第07期摘要:本设计利用现在已普及的智能手机为载体,设计了一款基于Android平台和低功耗蓝牙技术的智能防丢器。
防丢器由两部分组成,一部分是与物件绑定在一起的从机,一部分是用户所持有的主机。
当从机和主机建立蓝牙连接以后,防丢系统便正式开始运行。
从机部分采用支持蓝牙4.0BLE的CC2540芯片,主机部分是常见的Android手机。
在安卓系统上完成对检测软件的编程。
该软件能够通过手机与蓝牙芯片之间的信号强度值来进行报警。
文章阐述了Android蓝牙连接的一些细节并对判断逻辑的实现做出解释。
关键词:低功耗蓝牙;防丢器;Android系统中图分类号:TN925 文献标识码:A 文章编号:1007-9416(2018)07-0195-02随着科技的进步以及各种新鲜事物的冲击,个人在单位时间内处理的任务和信息量相较于过去有显著的提高。
在高强度的生活中,遗忘现象十分普遍。
如何寻找遗忘的物件也成为人们生活中的一个难题,比如随手一放的钥匙,钱币,饰品,还有信用卡,个人证件,耳机等等物品。
设计一款专门针对细小物件的防丢器非常实用,防丢器可以通过与细小物件绑定在一起,当物主和物件分离时提供报警,寻回等功能。
本设计利用现在已普及的智能手机为载体,设计了一款基于Android平台和低功耗蓝牙技术的智能防丢器。
1 防丢器的功能实现蓝牙防丢器由两部分组成。
一部分为与物件捆绑在一起蓝牙设备从机,一部分为用户随身携带的蓝牙设备主机。
用户与其防丢物件之间往往需要维持较近的距离,所以利用蓝牙短距离无线通信这一特点使设计非常便利。
首先,从机和主机之间要建立了蓝牙配对连接,用户通过主机搜索到正在广播的从机,在主机的配对表里选择从机完成连接。
当从机与主机建立连接后,主机周期性地得到一个主从机之间的信号强度值。
当该信号强度值小于预设的信号强度阈值时,主机启动报警,提醒用户物件即将遗失。
基于Android的校内失物招领系统的开发
基于Android的校内失物招领系统的开发作者:张子旭周云皓魏明军陈丽芳来源:《电脑知识与技术》2018年第14期摘要:随着科技的不断进步与智能手机的不断普及,人们得到信息的方式早已经从电脑转向了手机,而校园生活作为我们社会生活的重要组成部分,丢失物品等事件已经变得司空见惯。
该项目就是基于Android开发平台,实现了网络技术在失物招领中的应用,达到了使丢失物品及时物归原主的目的。
关键词:计算机科学与技术;安卓;校园;移动互联网;数据库中图分类号:TP311 文献标识码:B 文章编号:1009-3044(2018)14-0098-021 背景校园生活是当今时代下一个重要的部分,但是随着学生与老师在校时间的延长和在校人口的逐年增多,物品丢失也变得司空见惯。
尤其以大学校园首当其冲,在频繁的人口流动现状下,学生们甚至老师们在校园内丢失的物品已经变得越来越难以找回。
然而尽管丢物事件如此频繁高发,但我国目前各大高校的失物招领方式仍然局限于失物招领单、QQ群传达、QQ空间转发等形式,这种方法不仅造成了大量的资源浪费和环境破坏等问题,而且失物招领效率低下,同时该方法面对的用户群也十分狭窄,它的面向对象几乎只有在校学生,而在学校的老师和校内工作人员的物品丢失则显得力不从心了,这一点对于生活在学校的老师同学以及工作人员来说,仍然是十分不便的。
所以,开发了一款基于Android操作系统的校内失物招领系统。
2 需求分析该产品的主要研发目的在于极大地缩短广大在校师生的寻物时间,面对所有高校的师生及工作人员开放。
因此,校内失物招领系统开发主要是为了通过拾主与失主对物品信息的录入和发布,以方便失主对自己所失物品的查询与找回,具有双向性,更加高效便捷,极具实用性。
同时,失主无需再印刷大量失物招领单,既防止资源浪费,更为保护环境作出了巨大贡献,符合生态文明社会的建设。
因此,系统应能满足所有的在校人员均可在APP上注册并登录个人帐号,通过在地图标记发布并搜索失物和拾物,再由系统管理员对用户的信息进行核对。
基于Android平台的校园失物招领系统设计与实现

基于Android平台的校园失物招领系统设计与实现一、引言随着移动互联网的快速发展,校园失物招领系统成为了大学校园中不可或缺的一部分。
学生在校园中遗失物品的情况时有发生,而传统的失物招领方式效率低下,无法满足日益增长的需求。
因此,设计并实现一款基于Android平台的校园失物招领系统具有重要意义。
二、系统需求分析1. 用户需求学生用户:可以发布自己丢失或捡到的物品信息,并查看他人发布的信息。
管理员用户:对发布的信息进行审核和管理,保证信息真实有效。
2. 功能需求用户注册登录功能:学生和管理员均需要注册账号并登录系统。
失物招领信息发布功能:学生可以发布失物招领信息,包括物品描述、丢失地点、联系方式等。
失物招领信息查看功能:用户可以查看最新发布的失物招领信息。
管理员审核功能:管理员对发布的信息进行审核,确保信息真实有效。
三、系统设计与实现1. 系统架构设计基于Android平台的校园失物招领系统采用MVC(Model-View-Controller)架构,将数据层、业务逻辑层和界面显示层分离,提高系统的可维护性和扩展性。
2. 数据库设计使用SQLite数据库存储用户信息、失物招领信息等数据,确保数据的安全性和稳定性。
3. 界面设计设计简洁直观的用户界面,包括登录注册界面、失物招领信息发布界面、信息查看界面等,提升用户体验。
4. 功能实现用户注册登录功能:通过输入用户名、密码完成注册登录操作。
失物招领信息发布功能:填写相关信息并上传图片,发布失物招领信息。
失物招领信息查看功能:浏览最新发布的失物招领信息列表。
管理员审核功能:管理员登录后可以对发布的信息进行审核和管理。
四、系统测试与优化在系统开发完成后,进行系统测试以验证系统功能是否符合需求,并对系统进行优化以提升系统性能和用户体验。
五、总结与展望通过本文对基于Android平台的校园失物招领系统设计与实现进行详细阐述,可以看出该系统能够有效解决校园失物招领难题,提高校园管理效率。
华南理工大学“赛莱拉”第十二届“挑战杯”大学生课外学术科技作品竞赛获奖作品

城市公共自行车运营现状及资源优化配置研究——基于佛山桂城的调查报告
高校志愿服务管理系统优化建设研究 基于Timmons模型的大学生创业能力研究
以华南理工大学为案例的高校校巴运营情况调研及数学建模优化分析
华南理工大学“转型时期进城务工青年生存现状与发展前景”调研报告
听党的话,我们创业吧!——国家政策,家庭环境等相关因素对大学生自主创业观念和行为的影响调查研究报告
中国整车制造上市公司纵向整合与绩效关系研究 浅析网络购物商场品牌的建设
G、I、K 哲学社会教育
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 G-20 G-29 G-18 G-27 G-28 G-33 G-26 G-19
一种新型钙钛矿中空纤维膜的设计 大功率LED驱动电源及其集成控制系统 环保高效膨胀型无卤阻燃剂的制备及应用 阳极氧化铝光子晶体着色技术 便携式微型空气自呼吸直接甲酸燃料电池 水性环保集装箱涂料的制备和性能研究
聚丙烯酸酯水性粘合剂的制备及其在多层陶瓷电容器(MLCC)中的应用
银纳米线快速水消毒设备——一种新型生活饮用水快速消毒装置的设计
17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32
E-36 E-05 E-15 E-33 E-31 E-06 E-37 E-01 E-19 E-26 E-32 E-03 E-22 E-17 E-14 E-20
EC2071136 EC2081105 EC3041115 EC2071133 EC3071131 EA2091106 EC3071137 EC3141101 EA2041119 EC3031126 EC3071132 EC2141103 EC2031122 EA2041117 EA2041114 EA2041120
知网论文-基于Andriod智能手机的测绘软件开发应用探讨_陈秀萍

价值工程0引言测绘属于艰苦行业之一,测绘外业工作在地域上是天南海北,在时间上是春夏秋冬,在亲情上是别妻离子,在生活上是风餐露宿,工作流动性大,工作地点不固定,哪里有项目就到哪里工作,在项目区域内也是流动作业;有的测区自然条件差,荒无人烟,气候恶劣,交通和通讯不便;连续工作时间长,白天野外采集数据,晚上回到驻地还得及时编辑处理数据。
由于工作的需要,野外工作人员需要携带很多的装备。
在野外流动中作业,设备的重量对工作人员体力消耗巨大,在身体的极限状态,哪怕是半斤的重量也是一种解脱,如何借助现代科技,利用智能手机体积小、便于携带、成本低的特点,将测绘工作中一些常用的软件移植到Andriod 平台的智能手机中,对减少作业人员的体力消耗,提高生产效率将会起到积极的作用。
虽然全站仪、电子水准仪、GPS 等测绘中常使用的设备中都内置有相关的测绘软件,但这些设备一般是不开放,用户自己开发的能满足实际项目工作的软件几乎不能自行移植这些测绘设备中。
同时由于硬件环境通常只考虑测绘方面的功能,其他的辅助硬件都没有,如摄像头、语音录制、无线网卡等,故而很难满足用户的实际需要。
在这种情况下,选择基于Linux 为开放源码操作系统的Android 智能手机,通过自主开发或移植相关软件,架起测绘仪器与实际测绘工作需要的桥梁,可以解决测绘工作中的许多问题。
1Android 智能手机的性能综述1.1系统特点①Android 系统开放性:在时下五大系统智能手机中,开放性是Andriod 智能手机的显著特点。
Android 是Google 于2007年11月05日宣布的基于Linux 平台的开源移动操作系统的名称,主要使用于便携设备;该平台由操作系统、中间件、用户界面和应用软件组成。
它采用软件堆层(Software Stack )的架构,主要分为三部分。
底层以Linux 内核工作为基础,由C 语言开发,只提供基本功能;中间层包括函数库Library 和虚拟机Virtual Machine ,由C++开发。
android 平台下的无人机输电线路施工车辆巡检
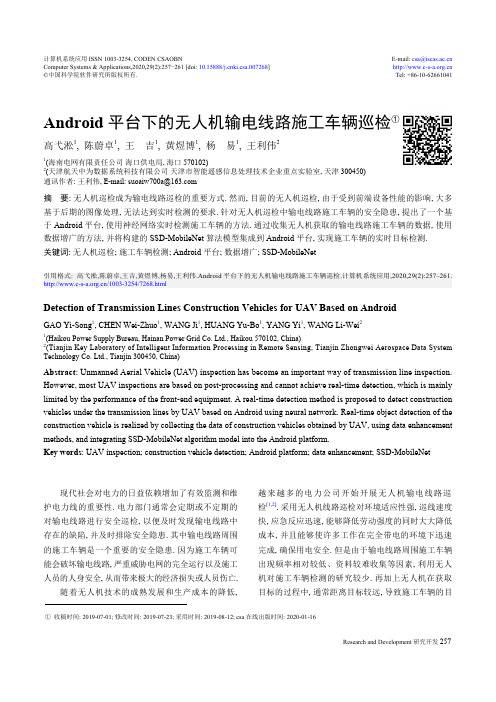
Android 平台下的无人机输电线路施工车辆巡检①高弋淞1, 陈蔚卓1, 王 吉1, 黄煜博1, 杨 易1, 王利伟21(海南电网有限责任公司 海口供电局, 海口 570102)2(天津航天中为数据系统科技有限公司 天津市智能遥感信息处理技术企业重点实验室, 天津 300450)通讯作者: 王利伟, E-mail: suoaiw700a@摘 要: 无人机巡检成为输电线路巡检的重要方式. 然而, 目前的无人机巡检, 由于受到前端设备性能的影响, 大多基于后期的图像处理, 无法达到实时检测的要求. 针对无人机巡检中输电线路施工车辆的安全隐患, 提出了一个基于Android 平台, 使用神经网络实时检测施工车辆的方法. 通过收集无人机获取的输电线路施工车辆的数据, 使用数据增广的方法, 并将构建的SSD-MobileNet 算法模型集成到Android 平台, 实现施工车辆的实时目标检测.关键词: 无人机巡检; 施工车辆检测; Android 平台; 数据增广; SSD-MobileNet引用格式: 高弋淞,陈蔚卓,王吉,黄煜博,杨易,王利伟.Android 平台下的无人机输电线路施工车辆巡检.计算机系统应用,2020,29(2):257–261./1003-3254/7268.htmlDetection of Transmission Lines Construction Vehicles for UAV Based on AndroidGAO Yi-Song 1, CHEN Wei-Zhuo 1, WANG Ji 1, HUANG Yu-Bo 1, YANG Yi 1, WANG Li-Wei 21(Haikou Power Supply Bureau, Hainan Power Grid Co. Ltd., Haikou 570102, China)2(Tianjin Key Laboratory of Intelligent Information Processing in Remote Sensing, Tianjin Zhongwei Aerospace Data System Technology Co. Ltd., Tianjin 300450, China)Abstract : Unmanned Aerial Vehicle (UAV) inspection has become an important way of transmission line inspection.However, most UAV inspections are based on post-processing and cannot achieve real-time detection, which is mainly limited by the performance of the front-end equipment. A real-time detection method is proposed to detect construction vehicles under the transmission lines by UAV based on Android using neural network. Real-time object detection of the construction vehicle is realized by collecting the data of construction vehicles obtained by UAV, using data enhancement methods, and integrating SSD-MobileNet algorithm model into the Android platform.Key words : UAV inspection; construction vehicle detection; Android platform; data enhancement; SSD-MobileNet现代社会对电力的日益依赖增加了有效监测和维护电力线的重要性. 电力部门通常会定期或不定期的对输电线路进行安全巡检, 以便及时发现输电线路中存在的缺陷, 并及时排除安全隐患. 其中输电线路周围的施工车辆是一个重要的安全隐患. 因为施工车辆可能会破坏输电线路, 严重威胁电网的完全运行以及施工人员的人身安全, 从而带来极大的经济损失或人员伤亡.随着无人机技术的成熟发展和生产成本的降低,越来越多的电力公司开始开展无人机输电线路巡检[1,2]. 采用无人机线路巡检对环境适应性强, 巡线速度快, 应急反应迅速, 能够降低劳动强度的同时大大降低成本, 并且能够使许多工作在完全带电的环境下迅速完成, 确保用电安全. 但是由于输电线路周围施工车辆出现频率相对较低、资料较难收集等因素, 利用无人机对施工车辆检测的研究较少. 再加上无人机在获取目标的过程中, 通常距离目标较远, 导致施工车辆的目计算机系统应用 ISSN 1003-3254, CODEN CSAOBNE-mail: csa@ Computer Systems & Applications,2020,29(2):257−261 [doi: 10.15888/ki.csa.007268] ©中国科学院软件研究所版权所有.Tel: +86-10-62661041① 收稿时间: 2019-07-01; 修改时间: 2019-07-23; 采用时间: 2019-08-12; csa 在线出版时间: 2020-01-16标较小, 且角度和距离不固定, 同时一些复杂的背景信息例如河流、房屋等可能会被拍入, 因此增加了对施工车辆的检测难度.对于施工车辆识别的研究, 文献[3]采用Hough变换直线检测的方法提取包含施工车辆的区域. 文献[4]通过对视频进行背景建模和运动检测, 检测目标物体.文献[5]采用背景差分的方法获取目标的位置. 然而, 这些方法都是通过静止的固定相机采集图像或者视频,其视角比较固定, 获取的施工车辆的大小、角度、背景等都较为确定, 其应用受到一定的限制. 文献[6]针对无人机收集的图像, 根据施工车辆的颜色、直线特征缩小图像识别的区域范围, 然后结合方向梯度直方图特征与支持向量机检测施工车辆. 然而, 该方法涉及的特征层次较浅, 并且无法满足实时检测的需求.本文针对无人机获取的输电线路施工车辆, 提出了一个基于Android平台的施工车辆目标检测系统.首先针对无人机获取的数据采用数据增广的方法, 增加样本的多样性和数量, 然后使用压缩和量化的SSD_ MobileNet模型完成对施工车辆的训练, 接下来将训练好的模型集成到Android平台, 最终实现在Andorid端对施工车辆的实时检测功能.1 施工车辆目标检测基于Android平台的施工车辆目标检测框架如图1所示. 施工车辆目标检测分为服务器端和Android端,其中服务端完成对施工车辆数据的训练, 其过程分为数据增广、模型量化训练、模型保存和模型转换. Android端集成服务器端训练的模型, 完成对目标施工车辆的实时检测.图1 目标检测框架1.1 数据增广无人机获取的输电线路施工车辆的样本数量比较有限, 通常采用数据增广的方法, 增加施工车辆的数据量, 同时也可以降低模型对某种属性的依赖, 提高模型的泛化能力[7]. 常用的数据增广的方法有平移、缩放、水平变换等, 然而这些方法使得图像的变化通常比较小. 无人机在线路巡检过程中, 处于不同的环境下, 所获取的施工车辆图像的背景差异很大, 并受到不同噪声的干扰, 这为施工车辆的检测带来了很大的困难. 本文通过赋予两张图像不同的权重, 使不同的样本相互叠加, 产生更多的样本. 而新的数据的背景更加复杂,并且图像的噪声也随之增加, 多样性更加丰富.叠加方img new img1img2αβ其中, 为叠加后的图像; 和分别为数据集中的两张图像; 和为两张图像的权重参数.1.2 目标检测神经网络结构本文使用的目标检测神经网络结构为S S D-MobileNet, 其结构如图2所示. 模型的特征提取网络部分使用MobileNet[8]网络结构, 在原来网络的基础上去掉最后的全局平均池化、全连接层和Softmax层;然后使用SSD[9]算法模型结构, 对MobileNet提取的特征层从6个不同尺度进行深层次的特征提取, 并从6个不同尺度信息中检测目标的位置, 这样可以更好的预测目标的位置及分类, 最后使用非极大值抑制法(Non-Maximum Supperssion, NMS)对重复的结果进行过滤, 得到最终的检测结果.1.2.1 MobileNet模型结构MobileNet[8]采用可分离卷积(depthwise separable)为其主要组成结构. 可分离卷积由3×3深度卷积(depth-wise convolution)和1×1追点卷积(Pointwise convolu-tion)组成. 相比传统的3×3卷积, 可分离卷积能够在性能不变的前提下, 参数量和计算量都相对降低.1.2.2 SSD模型结构SSD[9]是端到端的直接预测目标的类型和位置的单阶段目标检测网络, 没有使用全连接层, 因此模型参数有所减少. 它集合Faster-RCNN算法的anchors机制以及YOLO算法的回归思想, 使得算法可以提取不同纵横比图像的特征, 并降低训练的参数量, 从而保证准确率的同时, 提高算法的实时性.1.2.3 模型压缩为了提高模型识别速率, 达到目标实时性检测的要求, 需要对模型进行适当的压缩, 减少神经网络的参数. 本文通过设置压缩比, 较少特征提取网络每一层的特征数量, 从而较小网路的参数和计算量.计算机系统应用2020 年 第 29 卷 第 2 期标准卷积1×1×3× (1+4)Conv2/3 75×75×64Conv6/7/8/9/10/1119×19×5121×1×6× (1+4)1×1×6× (1+4)1×1×6× (1+4)1×1×6× (1+4)Conv14_25×5×512Conv15_23×3×256Conv16_22×2×256Conv17_21×1×128Conv17_12×2×64Conv16_13×3×128Conv15_15×5×128Conv14_110×10×256Conv12/1310×10×1024Conv4/538×38×256Conv1150×150×64输入300×300×3图2 SSD-MobileNet模型结构1.2.4 模型量化本文采用训练时量化方法, 其相比于训练后量化,能够得到更高的精度[10]. 在训练时, 利用Tensorflow[11]的量化库, 在训练和预测时通过在模型图中自动插入模拟量化操作来实现. 并采用逐通道量化方法, 将模型的权重和激活输出做8 bit量化, 这样不仅可以将模型的尺寸降低4倍, 而精度损失很小.1.3 网络训练及参数设置服务器端采用英伟达的TITAN XP显卡, 使用Tensor-flow[11]神经网络框架, 图像输入大小为500×500, 网络训练采用Xavier初始化权重, 一次迭代20张(batchsize)图片, 共100 000次迭代(steps), 网络采用随机梯度下降法(SGD)优化神经网络, 初始化学习率(base learning rate)设置为0.002, 学习率下降方式采用warm up[12]. 1.4 Android平台的设计Android平台通过调用tensorflow lite接口, 加载服务器端训练好的SSD_MobileNet模型. 当无人机在飞行过程中, 将获取的图像信息传输给Android端设备. 图像通过SSD_MobileNet模型计算出所对应的目标的位置. Android端实时显示无人机获取的目标图像, 并显示施工车辆目标检测的位置.2 实验结果与分析2.1 施工车辆数据采集为了获得丰富的无人机视角下的施工车辆数据,使用无人机采集了树木、红土地、房屋等不同背景下输电线路周围的包含吊车、挖掘机等多种施工车辆.从巡检的视频中, 共采集了157张输电线路周围的施工车辆图像, 每张图像包含的施工车辆数目不一定. 本文采用随机划分方法划分训练集和测试集, 其中训练集包含105张图像, 测试集包含张52张图像. 使用LabelImage工具箱, 用矩形标注框对数据进行手工标记, 然后保存为XML文件数据, 并与图片一一对应. 2.2 数据增广效果αβ两个不同背景下的施工车辆按照式(1)叠加后生成的图像如图3所示, 其中将和的值分别设置为0.8和0.2. 从图3中可以看出,通过叠加后的图像的背景比原始图像中的背景更加复杂, 图像相比变得模糊,图像中的噪声也有所增加. 图4所示为原始图像叠加不同的背景生产的图像, 通过对比可以看出, 不同的图像叠加后产生的新图像之间的噪声是不同的, 图像的多样性增加了.图3 数据增广本文将图像的模型的压缩比设置为0.3, 使用相同的网络和参数分别训练原始数据和增广后的数据, 其结果如表1所示. 通过对比可以看到, 通过数据增广后训练的模型, 在相同的测试集上测试的精确率和召回率都有所提升, 从而验证了本文提出来的数据增广方法对于施工车辆的检测是有效的.2020 年 第 29 卷 第 2 期计算机系统应用(a) 原始图像(b) 增广后的图像 1(c) 增广后的图像 2(d) 增广后的图像 3图4 不同背景的图像增广效果图表1 原始数据和数据增广后的数据效果对比(%)数据类型精确率召回率原始数据65.135.1数据增广67.238.52.3 不同压缩比模型对结果的影响将SSD-MobileNet网络的压缩值设置为0.7、0.5和0.3, 分别进行10万次迭代, 然后在不同Android设备上测试帧率, 结果如表2所示. 从表中可以看出, 不同Android设备处理图像的时间有所不同, 这与设备的性能有关, 在骁龙845设备上运行的速度要更快一些, 在骁龙710设备上运行的速度相比较慢一些. 当压缩比为0.5和0.3时, 能够达到帧率10 帧/s以上, 基本上能够满足目标实时检测的需求.表2 不同Android设备下的施工车辆识别帧率(帧/s)Android设备压缩比0.7压缩比0.5压缩比0.3麒麟950 6.910.914.2麒麟960 6.71012骁龙710 4.6 6.58骁龙8457.711.515.4本文测试了不同压缩比对识别施工车辆召回率和精准率的影响, 结果如表3所示. 当压缩比为0.7时精确度最高, 当压缩比为0.3时, 召回率的最高. 当压缩比越大, 网络每一层的特征层数越多, 学习特征的能力越强, 考虑到在Android端速度的影响, 当压缩比为0.7时, 不能够满足实时性的要求. 当压缩比为0.5时的效果比压缩比0.3的效果要差一些, 可能的原因是数据量比较小, 较大的模型无法很好的学习目标的特征. 通过对比不同的压缩比的速度、精确率和召回率. 最终选择当压缩比为0.3时的网络模型.表3 不同压缩比下的精确率和召回率的对比(%)压缩比精确度召回率0.776.836.80.566.735.90.367.238.52.4 施工车辆目标检测结果分析如图5所示为无人机获取的图像检测出的施工车辆, 使用SSD-MobileNet网络模型, 从无人机的视角能够正确检测出一些目标较大的、与背景有差异的施工车辆的位置. 如图6所示矩形框为无法正确检测出施工车辆的位置, 图6(a)中的施工车辆距离无人机较远, 施工车辆在图像中很小, 当图像压缩至分辨率500×500时, 施工车辆在图像中占的像素更小, 导致神经网络无法有效提取目标的特征, 使得无法检测出施工车辆的位置. 如图6(b)所示, 施工车辆的颜色与背景非常的相似, 再加上目标很小, 使得神经网络将施工车辆误判为背景, 同样导致施工车辆的漏检.图5 施工车辆检测结果(a) 小目标漏检图(b) 目标与背景相似漏检图图6 施工车辆漏检图计算机系统应用2020 年 第 29 卷 第 2 期3 结论与展望本文提出了一个基于Android 平台的实时检测输电线路施工车辆的方法. 使用SSD-MobileNet 网络模型, 通过数据增广处理, 提高了施工车辆检测的性能,并将模型集成到Android 设备, 实现对施工车辆的实时检测. 通过对比实验, 最终确定SSD-MobileNet 模型的压缩比为0.3时, 在Android 设备端能够达到实时检测施工车辆的要求. 但目前仍存在车辆漏检问题, 对于一些与背景非常相似和小目标的施工车辆的检测效果较差, 在以后的工作中, 需要通过优化SSD-MobileNet 神经网络, 提高对小目标施工车辆的检测效果.参考文献Deng C, Wang SW, Huang Z, et al . Unmanned aerialvehicles for power line inspection: A cooperative way in platforms and communications. Journal of Communications,2014, 9(9): 687–692. [doi: 10.12720/jcm.9.9.687-692]1Toth J, Gilpin-Jackson A. Smart view for a smart grid —Unmanned Aerial Vehicles for transmission lines. 2010 1st International Conference on Applied Robotics for the Power Industry. Montreal, QC, Canada. 2010. 1–6.2张全发, 蒲宝明, 李天然, 等. 基于HOG 特征和机器学习的工程车辆检测. 计算机系统应用, 2013, 22(7): 104–107.[doi: 10.3969/j.issn.1003-3254.2013.07.023]3杜金桥. 输电线路防外力破坏预警系统设计与研究[硕士学位论文]. 北京: 华北电力大学, 2015.4张琪. 工程车辆特征识别方法的研究[硕士学位论文]. 哈尔滨: 哈尔滨工业大学, 2006.5武金婷, 赵晓光, 袁德才. 无人机巡检输电走廊施工车辆识别方法研究. 控制工程, 2019, 26(2): 246–250.6Engstrom L, Tsipras D, Schmidt L, et al . A rotation and atranslation suffice: Fooling CNNs with simpletransformations. arXiv preprint arXiv: 1712.02779, 2017.7Howard AG, Zhu ML, Chen B, et al . Mobilenets: Efficientconvolutional neural networks for mobile vision applications.arXiv preprint arXiv: 1704.04861, 2017.8Liu W, Anguelov D, Erhan D, et al . SSD: Single shotmultibox detector. European Conference on Computer Vision. Amsterdan, The Netherlands. 2016. 21–37.9Krishnamoorthi R. Quantizing deep convolutional networksfor efficient inference: A whitepaper. arXiv preprint arXiv:1806.08342, 2018.10Abadi M, Agarwal A, Barham P, et al . TensorFlow: Large-scale machine learning on heterogeneous distributed systems.arXiv preprint arXiv: 1603.04467, 2016.11He KM, Zhang XY, Ren SQ, et al . Deep residual learning forimage recognition. Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern s Vegas, NV, USA. 2016. 770–778.122020 年 第 29 卷 第 2 期计算机系统应用。
基于手机的无线搜索技术
H pr x- dcd oi Sa h Ke br y eetn ue p er . lne 将用户检索提问分为三种: t I T c c i g 特指主题检索提问(pc iq e e) 泛指主 S ei ur s, f c i .
题检索提问(ra- pcqe e) B od o i ur s t i 及相似网页检索提问(i l-aeqe e) 而H T 算法则专注于改善泛指主题 S a pg ur s mir i . IS 检索的结果【 Ke br 网页( l lne  ̄ 】 i g . 或网站) 分为两类 , ̄hb和atots应该注意的是 ,每个页面也有两个级别 Pus u ri . h ie
的倒数 , 称为反向网页频率. 在很多的文档 自 动分类系统 中, 任意两个 网页 P 和 P 的相似度通常用其对应向量 , 和 , 的夹角余弦值来定义( 如公式2 所示) a ,I量夹角越小( j 即夹角余弦值越大) 明其相似度越高. ' 表 【J 6 7
西 大
’
.
Au .2 0 g 0 7
… 6 。。…
文章编号 :10-83 0 7 406 - 0 3 4 ( 0 ) -98 4 2 2 0 0
基 于手机 的无线搜索技术
肖铮 ,胡 景德 ,侯 宗浩
。 摘 ( 成都 东软信息技术 学院,成都 6 14 ) 184
要:无线搜 索 已成为一个新 的研 究、开发领域.并且 它主要用到信息检索、人 工智能、数据挖掘 、 自然语 言处理、
排序算 法等多领域的理论和技术 . 外, 此 它拥有大量 的用户, 有很 好的经济价值, 以引起 了世界 各 国计 算机科 学界和 所
信 息产业界 的高度 关注, 目前的研 究、开发十分活跃,并 出现 了很 多值得 注意的动向.
基于Android的校园“完璧”失物招领平台的设计与实现

基于Android的校园“完璧”失物招领平台的设计与实现作者:徐红楠耿乐张冬杰来源:《西部论丛》2019年第04期摘要:伴随着我国科学技术的不断发展,智能手机的应用也越来越广泛,人们在获取信息的方式已经从电脑转向为使用手机来获取信息。
现目前智能手机运用人群大多在学生手里,在校园中有很多同学有丢三落四的习惯,自己的东西经常丢。
基于此,本文主要是基于Android平台所开发校园“完璧”失物招领平台的设计和实现,通过运用网络技术在失物招领应用中,让失物能够重回物主手中,予以有关单位参考与借鉴。
关键词:Android;计算机技术;失物招领;设计与实现一、Android操作系统“完璧”失物招领平台需求分析Android操作系统“完璧”失物招领平台系统的研发目的主要是缩短在校师生寻找丢失物品的时间,其面对全校师生都是开放的。
所以在校园内的失物招领系统开发期间其主要是为了能够让失主在平台上添加丢失物品的具体信息,然后还可以让失主在平台上实时查询丢失物品是否找回等相关信息,其具有高效,快捷的实用性。
在某种程度上,其失主不用去印刷丢失物品信号的打印,然后在学校公告栏出粘贴等较为繁杂的事情,这样能够防止资源的浪费,也为建设生态文明校园做出贡献。
在一定程度上,这个“完璧”失物招领操作系统能够满足在校所有的师生员工在软件平台上查看自己所丢失物品的相关信息,在软件平台中,用户需要自己去注册账号,然后登陆,通过软件中的地图标记然后发布丢失物品的具体信息,然后提交,这样能够简化和寻找丢失物品的时间,与此同时还能够防止丢失物品冒领等现象出现,还能够在一定程度上提升丢失物品找回的效率。
二、“完璧”失物招领系统平台设计与分析“完璧”失物招领系统平台在架构上主要采用的是Android客户端的服务器以及MySQL数据库等组成构建,在一定程度上让校园失物招领不在仅限于以来PC端,从而让其变得更为灵活,在实际校园生活中变得更为实用。
“完璧”失物招领系统平台的功能是可以分为管理员,和会员这两种类型,其在一定程度上对于不同用户之间所拥有的权利是不一样的,管理人员是拥有较为全面的管理权限的,其可以对其他用户所发布的信息进行分类,然后对那些信用不良或者是存在虚假信息的违规用户给予处罚管理,“完璧”失物招领平台的管理人员还需要辅助该系统的后台运行和维护,这样才能够让该平台能够正常运行,给广大师生带来便捷。
一种基于智能手机WIFI的防丢失系统[实用新型专利]
![一种基于智能手机WIFI的防丢失系统[实用新型专利]](https://img.taocdn.com/s3/m/416395c3647d27284a7351d1.png)
专利名称:一种基于智能手机WIFI的防丢失系统专利类型:实用新型专利
发明人:谢东福
申请号:CN201520255653.4
申请日:20150424
公开号:CN204517909U
公开日:
20150729
专利内容由知识产权出版社提供
摘要:本实用新型一种基于智能手机WIFI的防丢失系统由主智能手机、WIFI跟踪器和从智能手机组成;其中,WIFI跟踪器通过WIFI连接主智能手机,主智能手机连接从智能手机,从智能手机通过WIFI连接跟踪器。
由于WIFI是智能手机最常用的功能,因此使用WIFI防丢失符合用户的实验习惯。
本实用新型可以低成本可靠实现防丢失。
申请人:谢东福
地址:314000 浙江省嘉兴市南湖区由拳路大树金港湾14#506
国籍:CN
更多信息请下载全文后查看。
基于Android的失物招领系统的设计与实现
基于Android的失物招领系统的设计与实现作者:李继全孙步嵩张欢郭奥张继山来源:《电脑知识与技术》2018年第34期摘要:随着生活节奏的加快,难免出现遗失物品的情况,高校中传统的失物招领与寻物启事方式具有一定的局限性,且容易泄露信息,针对这种情况设计并实现了基于Android的失物招领系统,具有招领信息发布,寻物信息发布等功能,该平台极大地满足了高校师生对于解决失物招领问题的需求。
关键词:Android;失物招领;Bmob后端云中图分类号:TP319; ; ; ; 文献标识码:A; ; ; ; 文章编号:1009-3044(2018)34-0057-021引言在生活中,遇到东西丢失,传统方式是在朋友圈、QQ空间、贴吧等平台发布失物招领与寻物启事,但具有一定的局限性,效率低下,易造成信息泄露或其他不必要的损失。
目前国内已构建的失物招领的网络平台,多是面向地区或公司的,这些网站功能并不完善,没有分类查询,阅读信息量较大,不能随时关注最新动态。
本文所研究的问题就是设计并实现一个功能完善且便捷的面向高校的失物招领平台,设计并开发出一款基于Android端的APP,以加快招领与寻物信息的传播,并帮助失主与拾主尽快取得联系。
2失物招领系统功能分析与设计2.1失物招领流程分析失主和拾主的流程大致相同,登录系统后,可以在信息搜索框进行查询,如果查询到已有失主或拾主发布的招领或者寻物信息后,查看信息详情进行评论联系物主或拾主归还失物。
即通过失物招领系统将失主和拾主快速高效地联系起来,做到精确的拾物归还和失物招领。
2.2系统功能框架设计通过模块化划分,系统主要由“登录注册”“信息中心”“个人中心”三大模块构成,每个模块又由若干子模块组成[1],如图1所示:2.3数据库设计本平台数据库采用Bmob后端云数据库,免去了几乎所有的服务端编码量,只需定义好表结构即可。
数据表有用户信息表,招领信息表,寻物信息表,评论信息表,共四张表,各表的关系如图2。
Android平台下基于无线信号强度的定位系统的实现

硕士学位论文(工程硕士)Android平台下基于无线信号强度的定位系统的实现IMPLEMENTATION OF WIRELESS LAN POSITIONING SYSTEM BASED ON SIGNAL STRENGTH ON ANDROID PLATFORM赵小东哈尔滨工业大学2011年12月国内图书分类号:TP393.1 学校代码:10213 国际图书分类号:621.3 密级:公开工程硕士学位论文Android平台下基于无线信号强度的定位系统的实现硕士研究生:赵小东导师:王鸿鹏教授申请学位:工程硕士工程领域:计算机技术所在单位:中国南山开发集团答辩日期:2011年12月授予学位单位:哈尔滨工业大学Classified Index: TP393.1U.D.C: 621.3Dissertation for the Master’s Degree of EngineeringIMPLEMENTATION OF WIRELESS LANPOSITIONING SYSTEM BASED ON SIGNAL STRENGTH ON ANDROID PLATFORMCandidate:Zhao XiaodongSupervisor:Prof.Wang Hongpeng Academic Degree Applied for:Master of Engineering Speciality:Computer Technology Affiliation:China Nanshan DevelopmentCorporateDate of Defence:Dec, 2011Degree-Conferring-Institution:Harbin Institute of Technology摘要随着3G网络的大规模建设与智能移动终端的迅速普及,移动互联网时代已经到来,定位系统更是成为移动通讯设备的缺省配置。
毕业设计——基于Android系统的失物招领平台的设计与实现

太原理工大学毕业设计(论文)任务书毕业设计(论文)题目:基于Android系统的失物招领平台的设计与实现毕业设计(论文)要求及原始数据(资料):1.综述生活中失物招领工作的现状,说明该项目实现的意义;2.深入分析失物招领事务的业务逻辑划分,证明项目的技术可行性;3.深入研究Android客户端程序与后台服务器进行网络通信的机制;4.熟练Android客户端前端逻辑处理的设计和实现;5.掌握搭建服务器的关键技术,学会搭建简单的后台服务器;6.实现Android客户端与后台服务器交互完成业务处理;7.训练检索文献资料和利用文献资料的能力;8. 训练撰写技术文档与学位论文的能力。
毕业设计(论文)主要内容:1.综述线下失物招领工作普遍遇到的问题和困境;2.了解目前流行的服务器框架搭建的技术;3.深入分析失物招领的业务逻辑,设计后台数据库;4.搭建后台服务器,响应客户端的数据提交和数据请求;5. 划分Android客户端的功能模块,设计项目的实现框架;6.Android客户端UI显示和逻辑处理代码的编写;7.完成失物招领平台的设计和实现。
学生应交出的设计文件(论文):1.内容完整、层次清晰、叙述流畅、排版规范的毕业设计论文;2.包括毕业设计论文、源程序等内容在内的毕业设计电子文档及其它相关材料。
主要参考文献(资料):[1]李欢.捡东西成累赘?探访失物招领现状[N].大河报,2015-01-06(2)[2]李刚.疯狂Android讲义[M].北京:电子工业出版社,2013[3]耿海宵,张丽梦.校园失物招领系统设计[J].Silicon Valley,2012,(4)[4] 董伟东.失物招领系统的建立[J].计算机光盘软件与应用,2014,(1):251-252[5] Lübke, Robert1;Schuster, Daniel; Schill, Alexander..A framework for the development of mobile social software on android [C].Mobile Computing, Applications, and Services - Third International Conference, MobiCASE 2011,(3):207-225[6] 袁伟华.多线程技术在Android应用程序与服务器通信的应用[J].电脑编程技巧与维护,2014,(4)[7] 卜炟编.开发参考:JSTL网络标签与SSH类参考手册[K].北京:中国铁道出版社,2010[8] Chandrashekar; Sushruth.Android application for school of art and design[D].San Diego State University,2014[9]Scott Oaks,Henry Wong.Java Threads[M].O’Reilly,2004[10] 上海杰普教研组.Android高级编程[M].上海:上海杰普,2014专业班级软件1110班学生王杰要求设计(论文)工作起止日期2015年3月23日~2015年7月3日指导教师签字尹珂男日期2015年3月23日教研室主任审查签字日期系主任批准签字日期基于Android系统的失物招领平台的设计与实现摘要基于Android系统的失物招领平台是基于当下各传统失物招领平台和一些网站型失物招领平台的不足而建立的一个新兴失物招领平台。
基于单片机的无线寻物系统

基于单片机的无线寻物系统
何冬冬;安霆;王韦舒
【期刊名称】《军民两用技术与产品》
【年(卷),期】2016(0)16
【摘要】本系统采用主动式无线寻物,由PIC12F629单片机、PIC12F1822单片机、无线射频收发芯片CS808及外围电路构成的发射器和接收器组成。
无线寻物系统通过在发送器按键发送信号,接收器接收到信号后驱动蜂鸣器发声和二极管发光来提示用户找到该设备,最终实现无线主动快速寻物。
【总页数】1页(P104-104)
【关键词】单片机;无线收发芯片;声光模块;无线寻物系统
【作者】何冬冬;安霆;王韦舒
【作者单位】临沂大学汽车学院,临沂,276000
【正文语种】中文
【中图分类】Z1
【相关文献】
1.基于PSoC4的智能无线寻物系统 [J], 冯晓鹏;陈刚
2.基于Android的无线智能寻物系统的研究与开发 [J], 王维樵;卢苗;邓舒宇;谭国平
3.基于ESP8266的无线定位室内寻物系统设计 [J], 李李漫丝
4.基于单片机的无线寻物器设计 [J], 顾亭亭; 李红霞
5.基于RFID的短距离无线寻物系统的研究 [J], 颜谦和; 颜珍平
因版权原因,仅展示原文概要,查看原文内容请购买。
基于Android的无线智能寻物系统的研究与开发_王维樵
- 18 -为了实现自动寻物功能,设计一个基于图像处理技术和路劲规划技术的智能小车寻物系统。
系统由智能手机平台和智能小车组成,智能手机平台负责控制智能小车和物品搜寻,智能小车负责图像采集。
通过实验,系统能在简单的地形环境中寻找到指定的物品。
关键词:寻物系统;手机控制;智能小车;图像处理;路径规划中图分类号:TP 391 文献标识码:A 文章编号:1674-6236(2014)03-0018-03基于Android 的无线智能寻物系统的研究与开发王维樵,卢 苗,邓舒宇,谭国平(河海大学 计算机与信息学院,江苏 南京 211100)摘要:在日常生活中,人们常常为丢失物品而烦恼,而传统的张贴寻物启示也有其不适用的时候。
为了方便快速精确的帮助人们寻找丢失物品,我们设计了一套基于智能手机的寻物系统。
目前市场上已经存在一些成型的产品,它们均以无线遥控技术为基础,通过发射器与接收器间的通信来确定物体的位置。
其又分为主动式与被动式两种,被动式的发射器安放在被寻物体上,一直带电工作,接收器安放在用户处,当接收不到发射器发出的声、光等指示信号时,表明物体需要被寻找。
而主动式则将接收器安放在物体上,一直带电工作,而发射器安放在用户一侧,当用户需要寻找物体时才用发射器向接收器发出信号,当接收器收到信号后,才通过声、光来精确定位物体[1] 。
无论主动式还是被动式都只能寻找安装了接收器或发射器的特定物体,无法起到真正寻物的作用。
因而我们设计了一套基于图像匹配的无线智能寻物系统,系统由捕获物品丢失位置四周的图片的下位机与对下位机进行控制与对图片数据进行处理的上位机组成[2]。
以用智能小车为下位机为例,小车由路径规划算法控制,自动对周围环境进行拍照,并由手机客户端访问小车,实时读取图片数据,手机客户端将小车捕获的照片与被寻物的照片通过图像匹配算法进行比较匹配,直到两组图片匹配为止,完成寻物目的。
系统的核心算法为小车的路径规划算法与图像匹配算法。
Android系统中Wi_Fi网络的研究与实现

Android系统中Wi_Fi⽹络的研究与实现⽂章编号:1671 1742(2010)05 0495 05Android 系统中Wi Fi ⽹络的研究与实现陈法海, 杨斌(西南交通⼤学信息科学与技术学院,四川成都610031)摘要:对时下流⾏的Android 系统中Wi F i ⽹络的实现技术进⾏了研究。
在详细分析Wi F i 模块的系统组成的基础上,从系统使⽤及编程者的⾓度,深⼊剖析了Wi F i 模块的初始化、启动、接⼊点扫描和IP 地址配置的实现,通过移植及调试W i Fi 驱动程序,成功验证了Wi F i ⽹络的实现过程。
关键词:计算机应⽤技术;嵌⼊式系统;Android;W i Fi 模块;接⼊点中图分类号:T P316 ⽂献标识码:A收稿⽇期:2010 10 221 Android 系统概述Android [1]是Google 公司开发的基于Linux 平台开源的⼿机操作系统,该平台由操作系统、中间件、⽤户界⾯和应⽤软件组成,具体框架结构由5部分组成,其核⼼为Linux2 6内核,向上搭配Libraries(函数库)及An droidRuntime(运⾏环境),再配合Application Framew ork(应⽤程序框架),来开发各种不同的Application(应⽤程序),是⾸个为移动终端打造的开放和完整的移动软件[2]。
Android 系统基于Linux 2 6内核来提供系统的核⼼服务,例如安全机制,内存管理,进程管理,⽹络堆栈和驱动模块。
其包含⼀组核⼼库,提供了Java 语⾔核⼼库内的⼤部分功能。
Android 应⽤程序运⾏于Dalvik 虚拟机上,Dalvik 虚拟机是基于寄存器的,编译器将Java 源⽂件转为class ⽂件,内置的dx ⼯具⼜将class ⽂件转化为Dex ⽂件,Dex ⽂件是在Dalv ik 虚拟机上运⾏程序的标准格式[3]。
在Wi Fi ⽹络⽅⾯,虽然Android 建⽴在Lin ux 内核之上,但是Wi Fi ⽹络的实现与⼀般Linux 操作系统不⼀样,下⾯结合Android2 1的源码,对Wi Fi 模块的⼯作原理进⾏了分析。
智能家居失物招领系统:科技物品找回的智能记忆

智能家居失物招领系统:科技物品找回的智能记忆在当今这个信息爆炸的时代,我们似乎已经习惯了与各种高科技产品为伍。
智能手机、平板电脑、智能手表等设备,几乎成了我们生活中不可或缺的一部分。
然而,随之而来的问题也日益凸显:这些小巧精致的科技宝贝们,一旦在我们繁忙的日常生活中不翼而飞,寻找它们就如同大海捞针一般困难。
幸运的是,随着智能家居技术的飞速发展,一种名为“智能家居失物招领系统”的创新技术应运而生,它就像是科技物品找回的智能记忆,为我们解决了这一难题。
想象一下,你焦急地翻遍家中每一个角落,寻找不知去向的智能钥匙,而这个系统就像是一位细心的管家,默默记录下每一次物品的移动和放置。
它通过精密的传感器网络,捕捉到物品在家中的动态轨迹,然后将这些数据存储在云端。
一旦你需要找回某个物品,只需发出指令,这位无形的管家便会迅速检索记忆库,指引你直奔目标。
夸张地说,这项技术简直拥有“鹰眼”般的观察力和“象鼻”般的记忆力。
它不仅能够精确地识别出每一件物品的形态和位置,还能记住它们的“生活习惯”——比如你的眼镜通常放在床头柜上,或者你的遥控器喜欢藏在沙发缝隙里。
这种对细节的敏锐洞察和超强记忆,让寻物变得不再是一场费时费力的探险。
然而,我们不禁要问:这样的系统真的万无一失吗?它的出现是否会导致我们对物品的依赖性进一步增强?会不会有一天,我们连最基本的寻物能力都会丧失,变得过分依赖这项技术?这些问题值得我们深思。
毕竟,科技的进步应该使我们生活更加便捷,而不是剥夺我们的基本能力。
智能家居失物招领系统无疑是一款极具创意和实用性的产品。
它用智能化的手段解决了现代生活中的一个小麻烦,让我们的科技宝贝们不再轻易迷失。
但同时,我们也应该警惕,避免过度依赖科技,保持人类自身的智慧和独立性。
只有这样,我们才能真正享受到科技进步带来的红利,而不是成为它的奴隶。
总的来说,智能家居失物招领系统是一次对传统生活方式的颠覆性创新。
它以其精准的定位、强大的记忆和用户友好的交互体验,为我们打开了一扇通往更智能、更便捷生活的大门。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
- 18 -为了实现自动寻物功能,设计一个基于图像处理技术和路劲规划技术的智能小车寻物系统。
系统由智能手机平台和智能小车组成,智能手机平台负责控制智能小车和物品搜寻,智能小车负责图像采集。
通过实验,系统能在简单的地形环境中寻找到指定的物品。
关键词:寻物系统;手机控制;智能小车;图像处理;路径规划中图分类号:TP 391 文献标识码:A 文章编号:1674-6236(2014)03-0018-03基于Android 的无线智能寻物系统的研究与开发王维樵,卢 苗,邓舒宇,谭国平(河海大学 计算机与信息学院,江苏 南京 211100)摘要:在日常生活中,人们常常为丢失物品而烦恼,而传统的张贴寻物启示也有其不适用的时候。
为了方便快速精确的帮助人们寻找丢失物品,我们设计了一套基于智能手机的寻物系统。
目前市场上已经存在一些成型的产品,它们均以无线遥控技术为基础,通过发射器与接收器间的通信来确定物体的位置。
其又分为主动式与被动式两种,被动式的发射器安放在被寻物体上,一直带电工作,接收器安放在用户处,当接收不到发射器发出的声、光等指示信号时,表明物体需要被寻找。
而主动式则将接收器安放在物体上,一直带电工作,而发射器安放在用户一侧,当用户需要寻找物体时才用发射器向接收器发出信号,当接收器收到信号后,才通过声、光来精确定位物体[1] 。
无论主动式还是被动式都只能寻找安装了接收器或发射器的特定物体,无法起到真正寻物的作用。
因而我们设计了一套基于图像匹配的无线智能寻物系统,系统由捕获物品丢失位置四周的图片的下位机与对下位机进行控制与对图片数据进行处理的上位机组成[2]。
以用智能小车为下位机为例,小车由路径规划算法控制,自动对周围环境进行拍照,并由手机客户端访问小车,实时读取图片数据,手机客户端将小车捕获的照片与被寻物的照片通过图像匹配算法进行比较匹配,直到两组图片匹配为止,完成寻物目的。
系统的核心算法为小车的路径规划算法与图像匹配算法。
收稿日期:2013–06–30 稿件编号:201306219基金项目:河海大学国家级大学生创新训练项目(201205XCX073)作者简介:王维樵(1990—),男,广东肇庆人。
研究方向:无线多媒体通信。
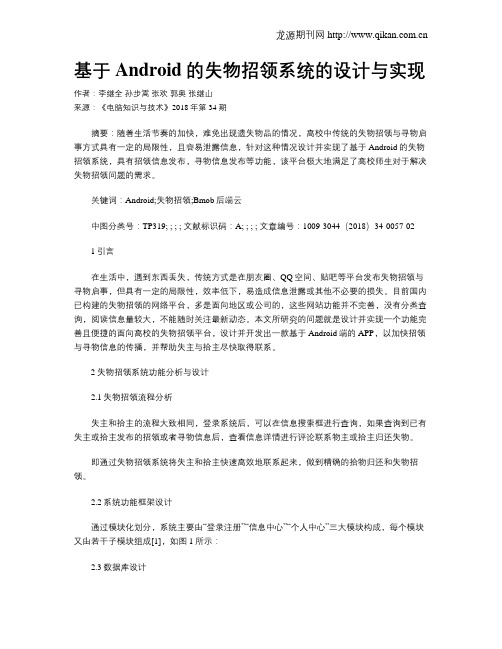
1 系统整体框架设计Development and research of object-searching system based on AndroidWANG Wei-qiao, LU Miao, DENG Shu-yu, TAN Guo-ping(Computer and Information College,Hohai University , Nanjing 211100,China )Abstract: In order to achieve the function of automatic searching object, an object-searching system combining with image processing technology and path planning algorithm is designed. The system consists of smart phone platforms and smart car. Smart phone platform is responsible for controlling the smart car and searching object, smart car is responsible for image acquisition. Through experiments, the system can find an appointed object in simple terrain environment.Key words: object-searching system; smartphone control; smart car; image processing; path planning本系统采用智能小车作为实验平台,能方便的进行平台的移植,具有广泛的适用范围,能根据用户的需求进行各种物体的寻找,真正起到寻物作用。
系统的硬件组成如图1,由手机客户端、路由器、单片机系统、显示模块与电机驱动模块组成。
手机客户端我们选择了当前使用率较高的Android4.2系统,向下支持到Android2.3。
软件的开发环境采用Eclipse 平台下的Android SDK。
Android 是一个面向移动开发和平板电脑开发的开源平台,Android 平台融入了面向手持设备的通用计算理念。
它是一个综合平台,包含一个基于Linux 的操作系统,用于管理设备、内存和进程。
Android 系统中的Java 库涵盖了电话、视频、语音、图形、连接、UI 编程和设备的其他许多方面[3]。
Android 平台作为新兴的智能手机平台,有着强大的应用图1 系统硬件组成Fig. 1 Components of the hardware system电子设计工程第 3 期第22卷Vol.22No.3Electronic Design EngineeringFeb. 20142014年2月- 19 -层API 和大量的传感器功能,其开放的平台有利于开发者开发出各种优秀的应用,并且Android 平台手机能无缝结合优秀的谷歌服务。
因而本文针对Android 手机的控制方式进行设计,提出一种更方便的寻物系统。
智能小车的核心模块为STC12C5A60S2微处理器,其与路由器、电机驱动模块和液晶屏连接,通过嵌入式系统实现接受上位机指令并响应控制等功能。
路由器选用TP-Link 的TL-WR703N,刷入嵌入式系统,实现手机与单片机的通信功能。
显示屏我们使用1602液晶显示屏来显示小车的运行状态。
而电机驱动模块则选择了常用的5V 电机驱动芯片L298D,并与4组直流电机相连,利用单片机使之工作在占空比可调的开关状态,精确调整电机的转速,实现小车的驱动控制。
控制软件主要分为下位机单片机控制程序与手机客户控制程序。
手机客户端作为寻物系统的重要功能部分主要包括小车运动控制、图片接收、图像比较等功能,按照功能的不同,将手机客户端分为小车控制模块与图像处理模块两大功能模块,每个模块均由独立的线程进行控制。
由于小车提供有相应的API 接口,手机只要发送特定的指令即可实现不同的控制。
2.1 小车控制模块小车控制模块主要实现小车的运动控制,其中又包括手动控制与自动控制两个部分。
对于手动控制,我们仿照游戏手柄上的摇杆设计,在界面上描绘了相似的360°控制摇杆来控制小车前进的方向,使得用户能更为直观、方便的手动控制小车。
当中央摇杆的位置方向发生改变时,其偏移量传递给小车位置控制线程,线程根据偏移量来判断小车前进方向,并向小车发出相应指令。
自动控制模块负责生成小车寻物路线,并向下位单片机发出相应指令,控制小车自动寻找物品。
寻物系统的关键在于小车的路线规划问题,这要求小车尽可能短的路线内准确的寻找到物体。
在只考虑工作环境为平面情况的条件下,采用栅格法建立环境模型,自由空间和障碍物可分别表示为自由栅格与障碍栅格。
设一个栅格为一点v ,构建一个赋权图G =(V ,E ),其中V 为顶点集合,E 为边集合,以捕获图片与原图的相似度为边的权值d v 。
则图的每个相邻点相互连通,边的权值d v 未知。
由于目标点未知,若用深度优先算法遍历赋权图的每一个点,求出每个点的相似度,再进行排序,得出最接近的一点,则可以求出物体的位置。
但这种方法虽然准确率高,但时间复杂度高。
若采用贪心算法,在每个阶段,选择一个与当前阶段所在顶点相邻的点v ,它在所有相邻的点中具有最大的d v ,然后进行访问,声明为已访问[4]。
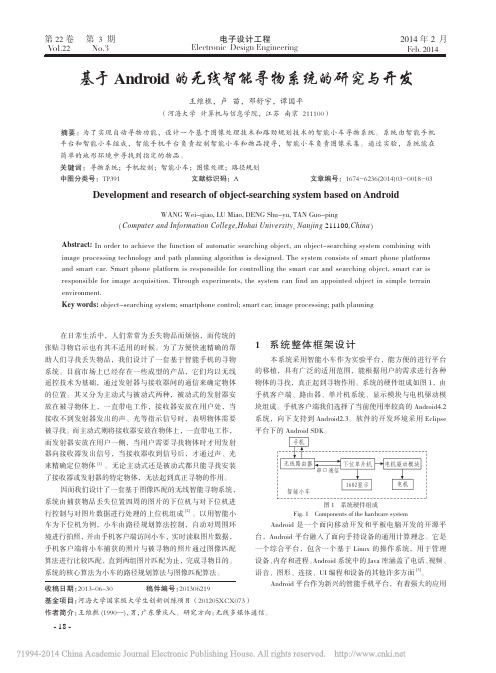
算法流程图如图2所示。
算法步骤如下:设S 为已经搜索过的顶点集合,U 为未搜索的顶点集合。
a)初始化 S ={A },U ={n ,n + 1,n + 2……n + n };2 控制系统软件设计b)从节点 A 开始搜索,扩展 A 到下一节点,选取权值d v最大的顶点 n ,并将 n 加入 S 集合,此时 S ={A ,n },U ={ n + 1,n + 2……n + n };c)以点n 为新考虑的中间节点,扩展 n 的节点,选取与点 n 相接而且权值d v 最大的下一节点 n +1,并将 n +1 加入 S 集合;以 n +1节点为新的扩展节点,重复步骤c) 的思想进行搜索,直到找到一点n ’,在点n ’的栅格内存在要寻找的物品,则算法结束。
2.2 图像处理模块图像控制模块主要负责图像接收与图像匹配。
图像接收负责实时接收小车发来的图片信息,显示在手机屏幕上,并在后台进行图片比较。
通过继承SurfaceHolder.Callback 类,能从小车路由器实时接收图片数据,并使用Canvas 方法描绘到画布上。
在程序接收图像的同时,程序通过多线程技术同时进行图像匹配,提高搜索速度。
系统的核心算法为图像识别匹配算法,图像匹配算法作为现今图像处理技术中一项重要的技术,涉及到图像采集、图像预处理、图像特征点提取等技术。
为了解决各种图像畸变带来的匹配困难,人们根据特征空间、相似性度量、图像匹配类型变换与变换参数的搜索四种元素提出了各种图像匹配技术。
如今主要的图像匹配技术主要分为基于灰度相关的匹配、基于特征的匹配、基于模型的匹配和基于变换域的匹配[5] 。
考虑到一般图像匹配算法的计算量大,时间复杂度高,对于处理速度有限的移动手机而言,要一直持续处理,开销非常大,会带来程序死锁的问题,所以我们采用“感知哈希算法”(Perceptualhash algorithm)来解决图像匹配的问题。
感知哈希是从数字媒体中提取的一串数字序列,是媒体感知内容的摘要。
令I 代表原始图像,I ’代表待检测图像,H (·,K )表示使用密钥K 加密后的哈希序列。
在哈希序列的匹配中,用匹配函数D (·,·)来计算两个数字媒体对象之间的感知距离,感知距离可用汉明距离或欧式距离计算。
假设阈值为M ,若D (H (I ,K ),H (I ’,K ))≤M ,则认为待测图像与原图像相似;若D (H (I ,K ),H (I ’,K ))>M ,则认为待测图像与原图像不相似。
一般而言,感知距离越大,两张图像差别越大。
图2 小车路线规划算法Fig. 2 Path planning algorithm of smart car王维樵,等 基于Android 的无线智能寻物系统的研究与开发- 20 -本程序的感知哈希算法实现如图3所示。