水口升船机直流调速系统负载自适应控制
水力式升船机的特点及关键技术
2017年12月第12期总第537期水运工程Port & Waterway EngineeringDec . 2017No . 12 Serial No . 537水力式升船机的特点及关键技术马仁超,李自冲,曹以南,王处军(中国电建集团昆明勘测设计研究院有限公司,云南昆明650051)摘要:介绍水力式升船机的特点,对水力式升船机的关键设计技术进行论述。
水力式升船机具有安全可靠、适应下游 水位变幅大的特点。
重点对水力式升船机的输水系统、机械系统、船厢出入水等关键技术进行探讨。
认为输水系统重点要 解决竖井水位同步和水流控制的问题,机械系统重点要解决无间隙传动和适应基础变形的问题,船厢出入水重点要解决出 入过程中不平衡荷载的影响。
关键词:通航建筑物;水力式升船机;特点;关键技术中图分类号:U 642文献标志码:A文章编号:1002-4972(2017)12-0038-04Characteristics and key technology of hydraulic ship liftMA Ren -chao , LI Zi -chong , CAO Yi -nan , WANG Chu-jun(China Power Kunming Engineering Co ., Ltd ., Kunming 650051, China )Abstract: This article introduces the characteristics of the hydraulic ship -lift , and discusses the keytechnology for hydraulic ship lift design . The hydraulic ship lift is safe and reliable , and can adapt to the large variation range of the downstream water level.This article focuses on the key technology of the filling and emptying system , mechanical system , and the status when the tank entering or leaving the water . It is pointed out that the filling and emptying system should focus on the synchronization of vertical shaft water level and the water flow control , the mechanical system should focus on the no-gap transmission and adaptation to the base deformation , and when the tank enters or leaves the water , the unbalanced loads need to be focused .Keywords : navigation structure ; hydraulic ship lift ; characteristic ; key technology水力式升船机采用水力驱动升船机的运行, 与传统采用电力驱动的钢丝绳卷扬式升船机和齿 轮齿条爬升式升船机比较有其独有的特点,在实 施过程中面临一些关键技术问题。
水轮机调节及水车自动控制课件(修改)

第一章 调速系统基础知识1.水轮机调节的根本任务 水轮发电机组把水能转化为电能供用户使用。
用户除要求供电安全可靠外,还要求电能 的频率和电压保持在额定值附近的某范围内。
频率偏离额定值过大对用户不利,可能使用户的产品质量降低。
按规定:系统频率应保持在50HZ ,其偏差不得超过±0.5HZ :对于大容量系统,频率的偏差不得超过±0.2HZ 。
此外,还应保持电钟指示与标准时间的偏差在任何时候不大于1分钟;对于大容量系统,不得大于30秒。
同时,电力系统的负荷是不断变化的,存在周期为几秒至几十分钟的负荷波动,这种不可预见的负荷波动幅值可达电力系统总容量的2~3%。
此外,一天之内系统负荷有早、晚两个高峰和中午、深夜两个低谷,这种负荷变化基本上是可预见的。
电力系统负荷的不断变化将导致系统频率的波动。
因此,必须根据负荷的变动不断地调节水轮发电机组的有功功率输出,并维持机组的转速(频率)在规定范围内。
这就是水轮机调节的根本任务。
2.实现水轮机调节的途径 通过什么方法与途径完成“水轮机调节”的基本任务呢?为简明起见,仅对一台水轮发电机组带负荷的情况进行讨论。
如图示是水轮发电机组示意图。
水轮发电机组示意图 水轮发电机转动部分是一个围绕固定轴线做旋转运动的刚体,它的运动可由下列方程描述:式中J ----机组惯性矩;ω---角速度,ω=p n/30(n 为机组转速);t M ---水轮机动力矩; g M ---水轮机阻力矩。
水轮机动力矩由水流对水轮机叶片的作用力形成,它推动机组转动,其大小决定于:水头H ,导叶开度a (流量Q ),机组转速等。
由上式可见,实现水轮机调节的途径就是改变水轮机导叶的开度。
3.水轮机调节的特点 ➢ 水轮机调节具有以下特点: ➢ 决定机组出力最基本的因素是水头和流量; ➢ 具有两套调节机构的水轮机,在对它们进行调节时,为了达到某种预期的目的,在两套机构之间设有相应的协联机构。
水口升船机电气控制系统改造研究
a e u d n y a d a l oe a e, n lz s o t d a t o k y t c ia r b e s whc o e nd r d n a c n fu t l rnc a ay e h w o e lwi s me e e hnc l p o lm ih f n t h t
a p a n t e a t ma i hi lf o e a i n, n h n e p u ds S n e s f t p e r i h u o t s p—i p r to a d t e x o n o l a e y me s r s c t aue .
第3 2卷 第 7期
21 0 0年 7 月
舰
船
科
学
技
术
Vo . 2,No 7 13 .
S I CI H P S ENCE AND TECH N0LOGY
J 1 ,2 1 u. 0 0
水 口升 船机 电气 控制 系统 改 造研 究
熊 志 华
( 汉数 字X程研 究所 , 北 武汉 407 ) 武 . - 湖 304
i o t n e t h p r to fs i l s Th spa e wi n e a p e o lcrc lc n r ls se o h hp— mp ra c o t e o e ain o h p—i . i p r, t a x m l fe e tia o to y t m ft e s i t f h lf a h i o y r p we t t n, ic s s h w o b id a lcrc lc n r ls se wi hg eib lt i tS u k u h d o o r sa i t o d s use o t u l n e e tia o to y t m t h ih r la ii y
水轮机调速系统的非线性自适应控制
水轮机调速系统的非线性自适应控制【摘要】良好的水门开度控制既能够改善电力系统暂态稳定性,也能改善动态品质及电力系统低频振荡。
国内外通常是以具有准确参数的理想水轮机模型为基础,来设计水轮机调速器的控制器。
本文根据水轮发电机具有的非线性特点,以及对其参数不稳定进行思考,采用自适应控制方法和微分几何理论,研究出水轮机调速的非线性自适合控制率,英文简称NAC。
通过相关实验得出,创建的调速器控制律具有较强的自适应能力,跟未考虑参数不确定的非线性控制律(CNGC)比较,其具有更好的抗干扰稳定性。
【关键词】调速系统水门控制;非线性控制;电力系统;参数自适应控制水轮机;非线性模型;较好的水门开度控制可以使电力系统大干扰稳定性得到提高,其还能使系统的小干扰稳定性和抑制系统低频振荡方面的能力得到增强。
采用PI或PID调节是传统水轮机常用的调节规律,参数只有空载和负荷2种。
现随着科技的进步与发展,各种水门控制方案被提出,从定参数PI,PID、有级变参数PID,至计算机调速器时代的连续参数适应PID控制、自适应调速控制、变结构变参数自适应控制、针对双馈发电机的神经网络控制、非线性控制、智能模糊控制、非线性解耦控制策略、和动态反馈线性化控制、非线性控制率等,等等这些方案的提出,推动了调速器的发展。
但这些控制器也有其局限性:这些控制器的设计基础都是线性水轮机模型确定了参数,在水轮机参数不确定、与运行点存在一定距离、或者运行参数发生改变时,这些模型无法匹配于与实际系统,造成系统难以达到预期的效果。
有关学者认为:具有确定参数的理想水轮机模型有助于用线性分析技术对控制系统进行调整。
然而,这样的模型并不适合涉及功率输出和频率大变化的研究,此时更加详细的非线性模型更应得到采用。
针对这种情况,本文就水轮发电机组的非线性和其参数的不确定性,最初建立一个水轮机综合非线性模型,该模型含未知参数,在模型的基础上,根据微分几何和自适应控制理论,探讨出一种非线性、自适应的水门控制设计方法。
水力式升船机电气控制系统设计与实现

rc mme d d whc a e nsc e s l aiae ig o gHy rui hpi. eo n e , ihh sb e u c sf l v d tdi Jn h n d a l S ilt uyl n c f
Ke o d : y a l hpi; o t l ytm; ein rai t n yW r s h d ui s il tcnr s r c f o s e d s ;e l a o g zi
p o o e .T e ee t c lc n r ls se fr h d a l h p i s a ay e r m h s e t o o t l mo e o to e r r p s d h lc r a o to y t m o y r u i s il i n z d fo t e a p c s fc nr d ,c n r ln t k i c l f l o wo
主 要 设 备 。负 责 完 成 对 升 船 机 设 备 的 状 态 监 测 、 信 息 采 集 与 解 析 、状 态 判 断 、设 备 运 行 控 制 、顺
序逻 辑保 护 、设备 故 障保护 及运行 数据 处 理等 。 升 船 机 电 气 控 制 系 统 的 设 计 必 须 以 安 全 可 靠 、 技
中图分类号 : 6 2 U 4 文献标识码{ 。。 B
。 文章编号 - 5 9 4 (0 2 1 ̄ o5 一 32 : l )0 2
3
1 水力式升船机设 备组成
水 力 式 垂 直 升 船 机 将 平 衡 重 做 成 质 量 和 体 积 合 适 的 浮 筒 ,通 过 调 节 浮 筒 的 入 水 深 度 产 生 浮 力 变 化 ,
Ab t a t Af rp e e t g t e man e u p n so y r ui h p i re y t e r q i me t o y r u i h p i o t lae sr c : t r s ni i q ime t f d a l s il t i f , h e u r e n h h c fb l e n s n h d a l s i l tc nr r c f o
水口升船机主拖动系统设计
6 m 5
1 mi( .m s m/ n02 /) 2 00 s .2m/
正 常 起 、 制 动 加 速 度 :± .l s 00 m/
2 主 拖 动 系统 设 计 要 求
由 于 升 船 机 主 提 升 系 统 的特 殊 性 , 要
另 一 网络 通 道 相 联 ,保 证 不 同类 型
和 不 同级 别 的参 数 分 传 送 。见 图 2 。
3 2传 动 装 置 .
每 台传 动 装 置 SMADYN I D控 制器采用 S R6型 六 槽 机 架 ,配 置 一 块 P 2 M 和 一 块 P 2 G 控 制 器 模 T0 T0 块 ,另 配 一 块 C 7通 讯 模 块 ,如 图 S 3所 示 。 由 CS 7模 块 上 配 置 的 三 只 S 5接 口子 模 块 联 网构 成 整 个 系 统 S
1引 言
水 口升 船 机 是 水 口 水 电 站 的 通 航 建
筑 ,是一座全 平衡钢 丝绳 卷扬 式湿运垂直 升 船 机 。建 成 以后 对 保 证 闽 江 航 运 的 畅 通
能在 较 大 范 围 内调 速 ,调 速 范 围 l :
2 , 并 能 满 足 准 确 停 位 的要 求 ; 0 起 、制 动 过 程应 缓 慢 平 稳 ;
通航 船型 :
船厢 水深 :
2 5 0 x0 t
25 .m
具 有 接 收 上 级监 控 系 统 的 控 制 指 令 完 成 指 令动 作 的 功 能 ;提 供 过 速 保 护 , 当速
允许 水深误 差 :
_ 0 + 0 mm 2
度 超 过 限 定值 时执 行 相 应 的 保 护 动 作 并 发 出 故 障信 号 ; 具 有显 示 和 自诊 断 功 能 ;实 现 四 台 电机 的 负载 均 衡 控 制 ; 电机 转 矩 的
水轮机的调速设备PowerPointTEMPLATE

Q=Vs/Ts Ts为导叶的直线关闭时间。 则由管内油的流速(4~5m/s)确定油管直径d。 v 大型调速器以主配压阀的直径为表征而组成系列, 计算出d以后,就可以查表选择调速器型号了。 v 对于双调节的转浆式水轮机,通常使转轮叶片的主 配压阀直径与导水机构的主配压阀直径相等。
水轮机的调速设备PowerPointTEMPLAT
E
2020/11/26
水轮机的调速设备 PowerPointTEMPLATE
第四章 水轮机的调速设备
一、水轮调节的任务
系统负荷变化→系统电压发生变化→发
系
电机励磁装置动作→发电机的端电压恢
统 复并保持在许可范围内。
负
荷
变 化
系统负荷变化→系统电流的频率f发生变 化,由于f是磁极对数p和转速n的函数→
水轮机的调速设备 PowerPointTEMPLATE
(3) 油压装置的选择
v 油压装置的工作容量以压力油罐的总容积为表征,故首先
应按经验公式求出压力油罐的总容积Vk:
Vk=(18~20)Vs
对于HL水轮机
Vk=(18~20)Vs+(4~5)Vc 对于ZZ水轮机
Vs和Vc分别为前面计算出的接力器容积。
件。调节性能优良,灵敏度和精确度高,成本低, 便于安装调整。目前还有不少电站在使用。 v 微机调速器:用工业控制计算机代替电子调速器, 赋予了调速器更多的控制功能,性能更优良。
水轮机的调速设备 PowerPointTEMPLATE
数字式电液调速器监控系统主界面
水轮机的调速设备 PowerPointTEMPLATE
第三部分:额定油压
水轮发电机调节系统自适应控制策略
水轮发电机调节系统自适应控制策略摘要:随着社会经济的欣欣向荣和我国城市建设快速发展,水轮发电机的应用范围愈加广泛。
水轮机调速器是水轮发电机组非常重要的辅助控制设备之一,它的运行特性直接决定了水轮机组运行的稳定性和安全性。
随着电网系统的日趋复杂、供电电压不断升高,电网系统在运行过程中经常出现超低频振荡现象,给供电安全造成了较大的隐患,无法满足供电系统运行安全性需求。
通过对电网低频振荡现象的分析,确定了水轮机调速器是导致电网产生低频振荡的主要原因,因此为了确保电网系统的运行安全,需要对水轮机调速器影响电网运行稳定性的原因进行分析,提升电网运行稳定性。
关键词:水轮发电机;调节系统;自适应;控制策略引言随着我国经济实力的快速提升,我国迎来了高速发展的全新时代,水轮机调节系统的重要性不言而喻。
机组找中心是水轮机检修工作中常见的一项工作。
在涉及到定子、轴承座更换时都需要找中心,确定机组轴线,最为基准,方便进行之后的设备安装工作。
1对现有求心器进行改进1)由于现在所使用的求心器采用的是对称螺栓调节控制中间滑块来控制钢琴线达到调节作用,但调节误差较大,由于使用螺栓调节,旋紧螺栓的力轻重也会对调节数据有较大的影响,因此直接舍弃了这种方式。
2)依据对策表,按照任务分配,实施对策。
班组成员讨论决定采用车床上的手摇滚珠丝杆滑台来调整。
班组从网上购入两台手摇滚珠丝杆滑台,并将两台设备通过螺栓连接构建一台十字滑台,滑台两端面均有螺帽、下端与基座连接、上端连接滑轮。
两部滑台分别控制X、Y方向,滑台配置有锁定装置,可防止因为太灵活导致的数据变动。
由于改进了求心器,调整方式由之前的螺栓调节改为手轮调节,并且锁定装置也有所优化,所以在调整精确度上有了极大提升。
2装配水轮发电机检修系统水轮发电机组存在很多事故隐患,如果存在一个对应的发电机检修系统,会减少事故的发生,提高发电效率。
因此,借助互联网、无线传感技术及大数据分析系统等,针对水轮发电机存在的产检问题,设计了水轮发电机常见故障的检测与检修系统。
水囗水电站升船机工作制动器检测装置改造分析

水口水电 站升船机工作制动器检测装置改造分析
胡 叶 斌
( 福 建水 口发 电 集 团有 限公 司 ,福 建 福 州 3 5 0 0 0 3 ) 摘 要 :工作 制 动 器 系统 作为 升船机 自动 化 系统 中的 一项 重要组 成部 分 ,担 负着 升船机 总体 运行
文献 标识 码 : B
文章编 号 : 1 0 0 2—3 0 1 1 ( 2 0 1 4 ) 0 1— 0 0 6 1— 0 2
刖 舌
故障共发生 8 6 起 ,有关安全制动器系统故障共发生
4 1 起 , 占全 年 故 障 率 的 4 7 % 。4 1起 安 全 制 动 器 系 统 故 障 中 ,检 测 装 置 故 障 2 2起 ,机 械 故 障 1 2起 , 其 它故 障 7起 ,检 测 装 置故 障 占安 全 制动 器 系统 故 障的 5 3 . 6 % 。可见 检测 装置 是 影 响安 全 制动 器 安 全
动盘存 在动态 偏移 ,再考 虑到摩 擦 片允许 磨损 量 ( 0~ 3 m m) ,加 上 分辨力 ( 1 mm) 不 够 ,检 测距 离 的不足直接引起上/ 松闸信号不到位 。
传感 器 支架 采用 螺丝 固定 。升 船机 主拖运 行 时 ,
防护 故 障调 查
据统计 , 2 0 1 2 年水 口船 闸通航 1 2 0天 ,升船机
收 稿 日期 :2 0 1 3— 0 3—0 9
制动盘存在动态偏移 ;制动器在上/ 松闸工作过程中
会有一定 的震动 ,时间一长 ,造成螺丝松动 ,传感
器 移位 ,检测 不到 位 。
61
2 0 1 4年第 1期
水 口升船 机 主拖 动在左 右 机房共 分 布 4个 吊点 , 每个 吊点 布 置 4个 制 动 器 的位 置 检 测 开 关 ,分别 有 安 全制 动器 、可 控 平 衡 重 制 动器 和 工作 制 动 器 。主 拖 动运行 工 况 中 ,以工 作 制 动器 为例 ,一个 吊 点 的 所 有工 作 制 动 器 均 进 到 位 后 ( 与 的关 系 ) ,才 发 出
水口水电厂1机调速器机柜国产化改造
滤 全部用 油 , 一个专 门为 电液转 换器 过滤 。 另
22 4 V分 配 阀 . E 0
E0 4V分配 阀装在 E 0M 下 部 ,以法 兰 与导叶接 力 4S 器进 出油管 连 接 , 用 V 5 , 配压 阀直 径 10 m 选 10型 主 5m , 图 2 E 0 电液控 制装 置 4M 它 的作 用 是分 配 导 叶接 力器 两 边 的压 力 油 ,进 油 或 回 ( 油) 并 使 导 叶 接 力 器 的位 移 与 功 率 放 大准 确相 对 应 , E0 4V装有 停/ 电磁 阀 、 开机 手动操 作开度 限制机 构 、 限制
圆 一
图 1
圈 一困
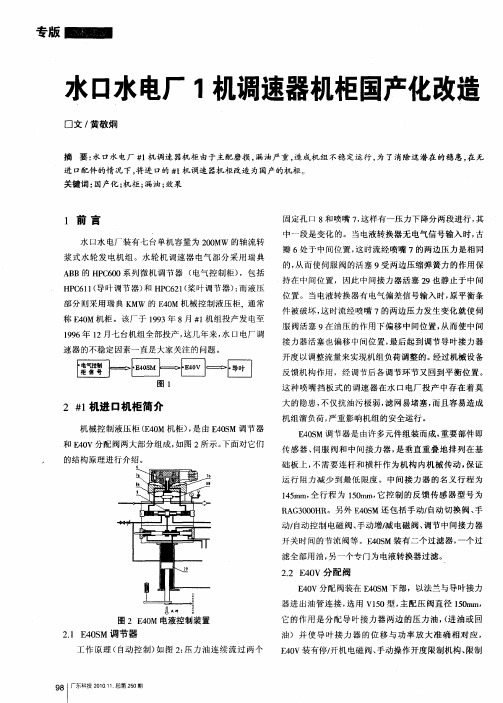
2 # 机进 口机柜简介 1
机械 控制 液 压柜 ( 4 M 机柜 ) 是 由 E 0 M 调 节 器 E0 , 4S 和 E0 4 V分 配 阀两 大部 分组成 , 图 2所 示 。 面对它 们 如 下
的结构原 理进行 介绍 。
E 0 M 调 节器 是 由许 多元件 组装 而成 , 要部 件 即 4S 重 传感器、 伺服 阀 和 中 间接力 器 , 垂直 重 叠地 排 列在 基 是 础 板 上 , 需 要连 杆 和 横杆 作 为机 构 内机 械 传 动 , 证 不 保 运 行 阻 力减 少 到最 低 限度 。中 间接 力 器 的名 义 行程 为 15 4 mm, 行 程 为 10 m, 控 制 的反 馈 传 感 器 型号 为 全 5m 它 R G 0O A 3 0 HR。另外 E O M 还 包括 手 动, 4S 自动切 换 阀 、 手 动/ 自动控 制 电磁 阀、 手动增 / 电磁 阀、 节 中间接 力器 减 调 开 关时 间 的节流 阀等 。E 0 M 装有 二个 过滤 器 , 4S 一个 过
水口升船机对接系统设备改造和试验研究

Science and Technology & Innovation ┃科技与创新·103·文章编号:2095-6835(2016)18-0103-02水口升船机对接系统设备改造和试验研究林宗霖(福建水口发电集团有限公司,福建 福州 350004)摘 要:水口升船机对接系统涉及多学科、多专业的技术集成,采用自动控制技术实现承船厢与上、下游挡水门精准对位自动对接。
简要介绍了对接系统设备的改造,通过对接系统设备的试验研究,验证了设备的性能,满足设计要求。
关键词:升船机;承船厢;挡水门;对接系统中图分类号:U642 文献标识码:A DOI :10.15913/ki.kjycx.2016.18.103水口升船机是全平衡垂直升船机,承船厢运行水深2.5 m ,2005年建成投入试通航,升船机承船厢与闸首(上、下游)挡水门对接系统是升船机正常运行的关键,通过精准对位对接原理分析、试验和研究设定对接参数。
对接系统原理为:主提升控制承船厢升降,与闸首挡水门精准对位,装设在闸首挡水门上对接装置,承担闸首与承船厢的对接,对接系统使承船厢和引航道铰接成一体,实现船舶进出承船厢的功能。
对接系统设备经过十几年的运行,密封老化,液压阀件磨损,电气元件老化和对接密封框漏水等需要改造。
1 对接系统设备对接系统设备有承船厢、闸首挡水门、对接密封框、拉紧及锁锭机构、液压泵站、现地PLC 子站和检测系统、充(泄)水装置。
1.1 承船厢承船厢设有厢端卧倒门、防撞梁、撑紧机构、液压泵站、承船厢PLC 子站及检测系统。
承船厢液压泵站的功能为控制撑紧机构推出、退回,升降防撞梁和启闭卧倒门。
承船厢两端部安装4个带孔的耳板,用于对接锁锭穿销和拉紧。
1.2 闸首挡水门要保证承船厢水深与闸首航道水位平齐,就要对闸首挡水门进行精确调节。
按照挡水门底槛水深在(2.5±0.03)m 范围内调节,控制承船厢升降行程,实现与闸首挡水门精准对位,保证后续操作对接执行机构安全、准确。
分析水电站调速器电气控制系统设计与改造思路——以福建省水口发电站为例
一、水电站调速器电气控制系统概况水口发电集团有限公司公司下属华东水口水电站公司是目前华东地区最大的水轮常规风力水电站,安装并拥有7台轴式交流转向螺桨式大型水轮风力发电机组,装机容量7×200mw,年平均发电量49.5亿kwh,在福建国际电网中主要承担着发电调峰、基荷、调频及紧急事故火灾备用和特殊压力情况下可用作低密度功率电等因素设备运行的发电任务。
电站1-7号发电机组于1993~1996年12月投产投入运行,发电机设计制造厂为哈尔滨电机厂,型式号为sf200—56/11950,冷却系统方式全封闭双线管路径向直流循环空气冷却发电系统;每台发电机额定容量222.2mva,额定电压13.8 kV;机组调速器采用维奥机电设备有限公司IC1703型调速器电气控制系统,液压控制系统为带中间接力器型导叶液压随动控制柜及桨叶比例阀+插装阀组合式液压控制随动系统。
调速器电气控制系统包含一个调速器电气屏以及屏内的电气元件,包括CPU,接口模块,I/O模块,电源模块等。
水口电站1-7号机机组调速器电气控制屏由2005年进行一轮更新改造,投运至今已近13年。
二、调速器电气控制系统设计与改造1.设备选型。
本文所举例的水电站,其运行时间已经有多年,随着运行时间的不断推移,调速器电气控制系统所出现问题的概率日益增加,尽快调速器中的机械部分的运行质量还较为良好,但是对其中电气控制系统的改造已经迫在眉睫。
本次设备选型采用电气控制屏含32位双CPU双冗余调节器、模块化结构、工业触摸屏、测频模块、冗余电源、模拟量、数字量I/O模块、功率变送器、工业触摸屏、测频模块、桨叶控制器、导、桨叶反馈传感器等。
2.系统配置。
调速器主要应用的是根据合同规定设备批量供货时的成熟的一种具有smpid三种调节运动规律的双驱动微机全数字式高速电液传动调速器,额定最高工作时间油压为4.0mpa。
调速器可以分为单独的两个机械传动液压柜和机械电气柜。
水力发电站机组调速系统的控制与优化

水力发电站机组调速系统的控制与优化水力发电站是目前全球最为常见的可再生能源发电方式之一,它利用水能转换成电能,能够满足人们日益增长的电力需求。
水力发电的核心设备是水力发电机组,它的质量和性能对发电效率和发电成本有着重要的影响。
水力发电机组的调速系统,则是保证其运转平稳和高效的关键之一。
本文将对水力发电站机组调速系统的控制与优化进行分析和探讨。
一、机组调速系统的工作原理水力发电机组的调速系统一般由调速器、调速机构、液力偶合器(或变速器)、主机轴等组成。
调速器对机组运行的转速和负载进行控制,通过调节液力偶合器或变速器的输出转矩来控制主机轴的转速和负载。
调速器采集机组运行的转速和载荷信息,并将其送到调速机构,调速机构根据这些信息控制调速器的输出信号,从而实现对机组的转速和负载的控制。
二、机组调速系统的控制策略机组调速系统的控制策略主要包括水头调节、负荷调节、转速调节以及机组启停等。
水头调节是根据水位变化调节涡轮的流量,从而控制发电机组的出力。
负荷调节是根据用户需求和电网负荷变化来调节发电机组的出力。
转速调节则是根据发电机组的标定转速来控制发电机组的转速。
机组启停则是根据电网调度需要、机组检修等因素来启停发电机组。
三、优化机组调速系统的控制优化机组调速系统的控制,旨在提高水力发电机组的运转效率,降低发电成本,延长机组寿命。
具体优化措施如下:1. 优化调速器的控制算法。
调速器控制算法的优化,可以提高机组的响应速度和稳态性,降低机组起停过程中的振动和应力,缓解机组磨损,从而延长机组的使用寿命。
2. 优化液力偶合器或变速器的控制策略。
液力偶合器或变速器的优化,可以提高机组的启动时间和运行稳定性,降低机组启停过程中的机械应力,减少对电网的影响,提高机组的运行效率。
3. 优化电网调度策略。
电网调度策略的优化,可以实现对机组调速系统的协调控制,提高机组的稳定性和响应速度,从而降低机组启停过程中的振动和应力,减少机组的磨损,降低发电成本。
大型升船机浮动自适应平衡重安装施工工法

大型升船机浮动自适应平衡重安装施工工法大型升船机浮动自适应平衡重安装施工工法一、前言大型升船机作为一种重要的港口工程设施,用于将船只从水中升起并搬运至陆地上。
在升船机的安装过程中,由于其巨大的体积和重量,传统的安装方法存在困难和风险。
为解决这一问题,大型升船机浮动自适应平衡重安装施工工法应运而生。
二、工法特点大型升船机浮动自适应平衡重安装施工工法的特点如下:1. 采用浮动自适应平衡重技术,实现对升船机的精确控制和稳定安装。
2. 减少了对现场环境的影响,避免了传统施工方法可能造成的断路、拆除和回填等问题。
3. 采用模块化设计,简化了施工工期和操作难度。
4. 高速浮动自适应平衡重装置,可在水面上运输并精确安装升船机。
三、适应范围大型升船机浮动自适应平衡重安装施工工法适用于各类港口工程,包括大型船坞、码头和港口设施等。
尤其适用于升船机的安装和调试,可在施工期间保证升船机的平稳运行。
四、工艺原理大型升船机浮动自适应平衡重安装施工工法主要通过以下技术措施实现:1. 通过数学模型分析升船机的质量、重心和浮力等参数,确定平衡重的尺寸和浮力,以确保安装过程中的平衡和稳定。
2. 采用先进的浮动自适应技术,通过自动调节平衡重的浮力和位置,使升船机保持水平和稳定的状态。
3. 通过合理的控制系统,实现对升船机的精确控制和平衡调整。
五、施工工艺大型升船机浮动自适应平衡重安装施工工法的施工工艺主要包括以下几个阶段:1. 准备工作:包括场地清理、水域测量和浮动自适应平衡重装置的组装等。
2. 浮动安装:将升船机装配在浮动自适应平衡重装置上,并通过浮力调节保持平衡。
3. 浮动调整:通过控制系统对浮动自适应平衡重装置进行调整,使升船机保持平稳的水平状态。
4. 固定安装:在升船机正确调整位置后,进行固定安装,以确保升船机的稳定和安全。
六、劳动组织大型升船机浮动自适应平衡重安装施工工法需要组织专业工人和技术人员进行施工,包括场地清理员、装配工、工程师和技术人员等。
水口电站升船机主提升设备制动器液压系统改造

水电誌机电技术Mechanical & Electrical Technique of Hydropower Station第43卷第3期2020年3月VoL43 No.3Mar.202062水口电站升船机主提升设备制动器液压系统改造王功明1,沈燕萍2,滕 楷彳,石守津$(1.福建水口发电集团有限公司,福建福州350000; 2.中国电建集团华东勘测设计研究院有限公司,浙江杭州310014)摘要:介绍了水口电站升船机主提升设备制动系统布置方案比选、事故制动情况分类、事故制动二级上闸控制回路及制动系统联调试验。
根据联调试验结果,二级制动平稳无冲击,最大制动距离仅35 cm,较改造前的70cm 大有改观,改造工作取得圆满成果。
关键词:升船机;主提升设备;事故制动;二级上闸;制动距离中图分类号:TH137文献标识码:B文章编号:1672-5387(2020)03-0062-02DOI : 10.13599/ki.ll-5130.2020.03.0200引言水口水电站2x500t 级湿运全平衡钢丝绳卷扬提升式垂宜升船机,是我国第一座自行设计、制造、 施工和安装的全平衡式垂宜升船机,于2003年4月经调试和内部试通航成功,2003年11月通过竣工 验收,2005年4月正式对外试通航。
水口升船机主提升设备的制动装置是确保升船机安全运行的核心 设备,其设有2种制动器,①设在电动机轴上的工作制动器,共8对;②设在主提升卷筒及可控卷筒上的安全制动器,共112对。
在上、下游两组吊点处各设1套制动系统液压站分别控制上、下游工作制动器及安全制动器。
主要作用:①用于正常停机制动,在主机减速运 行接近零速时,工作制动器上闸,主机停机延时数秒后,安全制动器上闸。
②用于事故制动,当升船机发 生机电设备故障时,使船厢在0.2 m/s 的额定运行速 度下平稳的停下来。
1改造目的降低船厢调平难度,将主提升卷筒安全制动器与可控卷筒安全制动器控制阀组分开设置,船厢调 平时,可控卷筒安全制动器松闸,使船厢受力处于静 定状态,便于调平。
水轮机调速器培训教材

水轮机调速器培训教材XX市科音自控设备有限公司前言根椐近几年来,天津市科音自控设备有限公司举办调速器培训班的经验,及一些电站的实际调试经验,我们编写了新版的调速器培训教材,为使本教材达到深入浅出的效果,参考了一些理论书籍,使本教材真正达到理论联系实际。
教材涵盖了天津市科音自控设备有限公司的大部分产品,及当前市场上其它有代表性的产品,具有一定的实用价值。
2001年5月,天津市科音自控设备有限公司研制的步进式PCC可编程智能调速器已成功应用于龙羊峡水电站,对小水电的两台YWT-600型微机调速器进行了改造。
在此基础上研制了数字阀PCC可编程智能调速器,该项目是国家科技部创新基金项目(项目编号:04C26211201022)。
该产品已在多个水电站成功投运,并被《世界经理人周刊》《经济日报.名牌时报》等媒体评为2005年中国500最佳新产品之一。
教材以创新基金项目“数字阀PCC智能调速器”为重点,介绍了调速器的构成、工作原理、操作和调整方法,同时介绍了步进式PMC微控制器调速器的相关内容,调速器的静态和动态特性,微机调速器的工作状态,调速器的试验方法和现场参数选择方法,以及油压装置的工作原理等。
希望通过培训使学员能够掌握调速器的基本原理,能够正确使用调速器,对调速器进行必要的日常维护。
避免由于操作和维护不当而造成调速器故障。
在编写过程中得到了天津市科音自控设备有限公司研发部部长钱军辉,工程师:张伟朋、丛燕、黄炎彬的大力支持,在此表示衷心感谢。
不当和遗漏之处,恳请大家不吝指正。
编者2006年 10月于天津市科音自控设备有限公司目录目录 (I)第一章概述 (1)1.1水轮机调速器的任务: (1)1.2水轮机调速器的种类: (1)1.3调速器的型号说明 (1)1.4水轮机调节系统的特点 (1)1.5调速器一览表 (2)第二章水轮机调节系统的静态和动态特性 (3)2.1水轮机调节系统静态特性 (3)2.1.1永态转差系数 (3)2.1.2转速死区ix (4)2.1.3人工频率死区Ef(ef)和人工开度/功率死区Ey/p (4)2.2微机调速器动态特性 (5)第三章微机调速器的工作状态 (7)3.1停机等待(TJDD)状态 (7)3.2开机(KJ)过程 (7)3.3空载(KZ)状态 (8)3.4负载(FZ)状态 (8)3.5甩负荷(SFH)过程 (8)3.6调相(TX)状态 (8)3.7停机(TJ)过程 (9)第四章数字阀PCC智能调速器的特点及构成 (10)4.1主要特点 (10)4.2主要功能 (11)4.3调速器的构成 (11)第五章数字阀PCC智能调速器的电气工作原理 (14)5.1可编程计算机控制器(PCC) (14)5.1.1 中央处理器(CPU) (14)5.1.2 数字量输入模块(DI) (15)5.1.3 数字量输出模块(DO) (16)5.1.4 模拟量输入模块(AI) (16)5.1.5 模拟量输出模块(AO) (17)5.1.6 数字量混合模块和模拟量混合模块 (17)5.2YZFT系列数字阀PCC智能调速器(中小型)电气原理图 (17)5.3ZFST系列数字阀PCC智能调速器(大型)电气工作原理 (17)5.3.1 PCC的配置 (17)5.3.2 导叶接力器反馈回路 (20)5.3.3 桨叶接力器反馈回路 (20)5.3.4 测频电路 (20)5.3.5 桨叶电磁阀驱动回路 (20)5.3.6 导叶电磁阀驱动回路 (21)5.3.7 电源 (21)5.3.8 人机界面 (21)第六章数字阀PCC智能调速器的操作方法 (22)6.1触摸屏使用方法 (22)6.1.1 操作显示画面 (22)6.1.2 参数设置画面 (22)6.1.3 功能选择画面 (23)6.1.4 故障诊断画面 (23)6.1.5 试验画面 (23)6.1.6 帮助画面 (23)6.2.1 开机前的准备 (23)6.2.2手动开机 (24)6.2.3电手动开机 (24)6.2.4自动开机 (24)6.3并网 (24)6.3.1 跟踪网频 (24)6.3.2 停止跟踪网频 (24)6.3.3 并网运行 (25)6.4正常停机 (25)6.4.1手动停机 (25)6.4.2电手动停机 (25)6.4.3自动停机 (25)6.5紧急停机与复归 (25)6.6手、自动转换 (25)6.6.1自动切至手动 (25)6.6.2 手动切至自动 (25)第七章数字阀PCC智能调速器的静态调整 (26)7.1调速器二次接线后的检查工作 (26)7.2导叶接力器的位置调整 (26)7.3桨叶接力器的位置调整(仅双调有此项) (27)7.4转速表调整 (27)第八章 YWBT系列步进式PMC微控制器调速器 (28)8.1主要特点 (28)8.2步进式PMC调速器的构成及工作过程 (28)8.3调节器工作原理 (29)8.3.1微控制器的结构 (29)8.3.2A/D 转换器 (31)8.3.3电源监视器 (31)8.3.4 开关量输入通道 (32)8.3.5人机界面 (32)8.3.6 步进电机控制回路 (32)8.3.7 接力器反馈回路 (33)8.3.8测频电路 (33)8.3.9电源 (34)8.3.10操作回路及指示电路 (34)8.4调速系统工作过程 (34)8.5操作方法 (34)8.5.1 开机 (34)8.5.2 并网 (34)8.5.3 正常停机 (35)8.5.4 紧急停机 (35)8.5.5 复归 (35)8.5.6 手自动切换 (35)8.6调试步骤 (35)8.6.1 全开、全关位置调整 (35)8.6.2 转速表调整 (35)第九章 YWFT系列数字阀PMC微控制器调速器 (36)9.1主要特点 (36)9.2数字阀PMC调速器的构成及工作过程 (36)9.3调节器工作原理 (37)9.3.1 电气原理图 (37)9.3.2 脉宽调制(PWM)输出 (37)9.4人机界面的操作方法 (39)9.4.2 参数的修改方法 (39)第十章步进电机式调速器机械液压系统构成及工作原理 (42)10.1步进电机式电液转换器 (42)10.1.1中、小型步进电机式电液转换器 (42)10.1.2大型步进电机式电液转换器 (44)10.2主配压阀 (45)10.2.1 中小型主配压阀 (45)10.2.2大型主配压阀 (46)第十一章数字阀调速器机械液压系统构成及工作原理 (47)11.1二通插装阀 (47)11.1.1 二通插装阀的基本结构与原理 (47)11.1.2 主阀单元 (48)11.2电磁球阀(图11-7) (52)11.3位移变送器 (53)11.4数字阀调速器 (53)11.4.1小型数字阀调速器 (53)11.4.2大、中型数字阀调速器机械液压工作原理 (55)11.4.3双调节数字阀调速器 (57)11.4.4冲击式数字阀调速器 (59)11.5分段关闭阀 (61)11.6事故配压阀 (61)第十二章油压装置工作原理 (62)12.1油泵 (62)12.1.1齿轮泵 (62)12.1.2螺杆泵 (62)12.2组合阀 (62)12.2.2调整安全阀 (64)12.2.3调整卸荷阀 (64)12.2.4卸载阀检查 (64)12.2.5单向阀检查 (64)12.3空气逆止阀(图12-2) (65)12.4自动补气阀(图12-3) (66)12.5磁翻板液位计 (67)12.6油混水信号器 (67)12.7自动补气装置 (68)12.8空气过滤器 (69)第十三章调速器的试验 (70)13.1静态特性试验 (70)13.2动态试验 (70)13.2.1手动方式空载试验 (70)13.2.2自动方式空载试验 (70)13.2.3自动开机试验 (70)13.2.4手/自动切换试验 (70)13.2.5正常自动停机试验 (70)13.2.6紧急停机试验 (70)13.2.7甩负荷试验 (70)13.2.8带负荷连续72小时运行试验 (70)第十四章调速器现场参数选择方法 (71)14.1PID参数选取原则 (71)14.2PCC调速器现场参数选择方法 (71)14.3PMC调速器现场参数选择方法 (71)14.4调节参数BT T D T N与K P K I K D的关系 (71)第一章 概 述1.1水轮机调速器的任务:水轮机调速器的基本任务是不断地调节水轮发电机组的输出功率,维持机组的转速(频率)在额定转速(频率)的规定范围内。
大型水轮发电机调速控制器的自适应控制
大型水轮发电机调速控制器的自适应控制
胡伟;范宗方;梅生伟
【期刊名称】《电力自动化设备》
【年(卷),期】2004(024)008
【摘要】针对大型水轮发电机调速控制器,提出了非线性自适应控制设计方法.首先,建立含有未知参数的非线性数学模型,其次通过递推设计方法得到了自适应控制策略,而且在策略中包含了对未知参数的动态估计,最后获得了水轮机调速器的自适应分散镇定控制策略.在控制策略中所有的变量都是可量测的,并且控制策略具有分散性和适应性.计算机仿真研究结果证明了水轮发电机调速控制器的自适应控制策略的有效性.
【总页数】4页(P1-4)
【作者】胡伟;范宗方;梅生伟
【作者单位】清华大学,电机工程与应用电子技术系,北京,100084;三门峡水利枢纽管理局,河南,三门峡,472000;清华大学,电机工程与应用电子技术系,北京,100084【正文语种】中文
【中图分类】TM312;TP273+.2
【相关文献】
1.直流调速系统模型参考自适应控制器设计 [J], 邢晓熙;戴宁生
2.基于L1自适应控制理论的矿井提升机调速控制器设计 [J], 罗清顺;李璟澜;刘辉;杨秦敏
3.粘度测量直流电机调速系统自适应控制器的建模与仿真 [J], 孙丹;龚仁喜
4.直流调速系统模型参考自适应控制器设计 [J], 邢晓熙;戴宁生
5.直流调速系统神经模糊自适应控制器设计 [J], 王立红
因版权原因,仅展示原文概要,查看原文内容请购买。
水口水电厂机组调速器控制系统改造
水口水电厂机组调速器控制系统改造
张秀霞
【期刊名称】《电力与电工》
【年(卷),期】2008(028)002
【摘要】简述了水口水电厂机组调速器控制系统改造的必要性;介绍了TC1703调速器的组成及原理;分析了系统现场调试情况;提出了改进建议.
【总页数】4页(P64-67)
【作者】张秀霞
【作者单位】福建水口发电有限公司,福建,闽清,350800
【正文语种】中文
【中图分类】TK730.4+1
【相关文献】
1.隔河岩水电厂4号机调速器电气控制系统改造 [J], 刘飞;匡蕾;邓诗军
2.水口水电厂7号机组调速器液压系统振动的处理 [J], 郑仕任
3.水口水电厂#3机调速器电气控制系统改造 [J], 吴星榕
4.水口水电厂高压气机控制系统改造 [J], 吴星榕
5.水口水电厂主变冷却器控制系统改造 [J], 张毅;王强
因版权原因,仅展示原文概要,查看原文内容请购买。
水轮机调速系统的应用及其故障维修

水轮机调速系统的应用及其故障维修发布时间:2022-10-24T02:17:57.064Z 来源:《新型城镇化》2022年20期作者:江碧琪[导读] 水力发电事业是我国重要的基础性能源行业,随着科技水平的不断发展,水轮机调速系统在水电机组中得到了广泛应用,并对促进水电事业发展起到了重要作用。
国网江西省电力有限公司柘林水电厂江西九江 332000摘要:水电站维护是水利工程重要环节,在发电中起着重要作用。
因此,水电站的稳定运行可以保证电力供应的质量和安全。
水电站技术维护人员必须进行水轮机调节系统的调试和维护工作,以确保水电站的最大效用和功能。
关键词:水轮机;调速系统;应用;故障维修水力发电事业是我国重要的基础性能源行业,随着科技水平的不断发展,水轮机调速系统在水电机组中得到了广泛应用,并对促进水电事业发展起到了重要作用。
针对调速系统在运行时发生的各类故障,检修人员应不断加强对检修处理技术的探索和优化,确保水轮机调速系统运行水平的不断提高,以促进水轮机的稳定运行,从而为水电事业的发展提供助力。
1 水轮机调速系统的应用1.1水轮机调速系统的发展应用我国的水轮机调速系统历经了五个时期的发展,分别为机械液压调速系统、电子管调速系统、晶体管调速系统、集成电路调速系统及微机调速系统。
其中,微机调速系统的电气控制器主要包含两部分,即PLC(可编程逻辑控制器)与PCC(可编程计算机控制器)。
在微机调速器液压随动体系中,其电液转换装置分为控制电机和数字阀(或比例阀)两类,后者以输出流量的形式对主配压阀进行直接调节,而前者通过输出位移形式对主配压阀进行控制,然后利用主配压阀对导水系统的主接力器进行调节。
调速器动力系统主要来源于水轮机调速器油压设备。
而对调速系统机械液压体系类型的选用计算根据及算法,主要有:主接力器的操作功计算;对主配压阀的类型选择;油压设备压力罐(或储能器)及回油箱容积的计算;数字阀(比例阀或伺服阀)的类型选择;油泵出口滤油器选择;齿轮泵(或螺杆泵)的类型选择等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1前言主提升控制技术是升船机的核心技术之一,它以电力拖动为基础。
目前在建和已建成的升船机既有采用直流调速控制,也有采用交流变频控制。
已建成的升船机以直流调速为主,一般采用转速电流双闭环调速系统。
实践表明,当被控对象参数发生大范围变化时,系统的动态性能(如电动机轴上的机械惯性、电流断续条件下系统放大倍数)将随之发生明显变化;因此,为达到最优性能,需要根据具体情况调节最佳参数。
本文在分析研究双闭环调速系统模型的基础上,对水口升船机直流控制系统的参数进行优化,使系统动态性能达到最优。
2系统工作原理水口升船机主提升系统最大提升力4×600kN ,最大提升高度59m ,升降额定速度12m/min ,正常升降加速度为0.01m/s 2,快速制动加速度0.02m/s 2,由4台功率为160kW 的西门子直流电机驱动,可以四象限运行。
4台直流电动机通过同步轴相连形成一个矩形的闭环,经4个吊点的减速器带动主提升卷筒,实现承船厢的上行和下行运行。
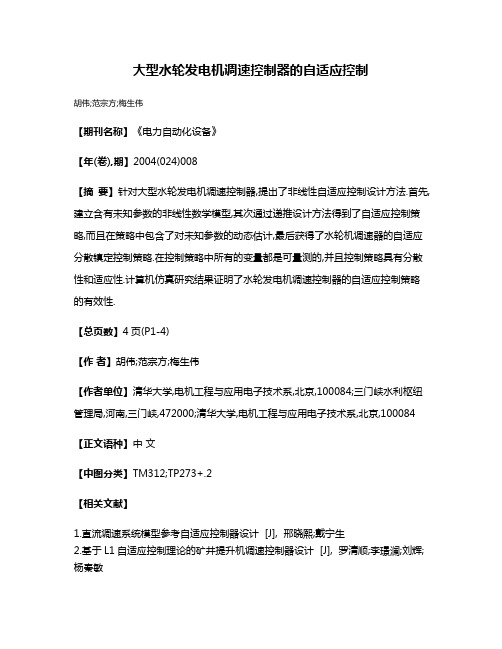
主提升拖动系统采用转速电流双闭环级联控制直流调速方式,每套传动装置具有相对独立的速度控制器、电流控制器和励磁电流控制器,其控制系统如图所示。
系统中设置个调节器,分别为转速和电流调节器;转速调节器的输出U 作为电流调节器给定输入值,电流调节器的输出U 作为可控硅触发装置的控制电压。
SITOR 可控硅组件内置一组独立的可控整流桥,提供给电动机一恒定励磁电流。
在SIM ADYN D 软件中设置励磁电流,通过闭环控制方式实现对直流电机的恒定励磁电流控制。
转速调节器的给定信号为U ne ,反馈信号U n 与转速成正比即U n =αn 。
稳态工况下,转速调节器输入信号△U n =U ne -U n =0,U ne =U n =αn 。
转速调节器输出值U ie 作为电流调节器的输入值,电流调节器的反馈信号U i 与直流电机的电枢电流I d 成正比即U i =βI d ;电流调节器输入信号△U i =U ie -U i =0,U ie =U i =βI d ,I d =U i e /β。
即在电流调节器作用下,直流电机的电枢电流保持某一给定值,电机转速保持恒定;有效抑制了电网电压波动所引起的电流波动。
转速调节器采用限幅的PI 调节器,其最大输出值为限幅值U im ,将电流调节器输出的电枢电流限制在最大允许值I dm 上,保证可控硅元件和直流电机的设备安全。
当系统受到负载扰动影响时,系统进行自适应暂态调速过程;通过转速调节器的积分作用而消除转速偏差。
具体工作过程见图所示。
在升船机启动运行过程中,转速调节器的给定信号为一突加给定值U ;由于负载的惯性质量大,水口升船机直流调速系统负载自适应控制陈思东(水口发电有限公司,福建闽清350800)摘要:对双闭环调速系统模型进行分析,获得了优化调节模型参数的方法,使直流调速系统能适应大范围的可变负载;将该调节方法在水口升船机的工程实践应用,改善了系统动态性能。
关键词:升船机;直流调速;动态性能中图分类号:U642.6文献标识码:B文章编号:1006-0170(2006)01-0029-03图1转速电流双闭环直流调速系统图F UJIAN DIANLI YU DIANGONG第26卷第1期2006年3月IS S N 1006-0170CN 35-1174/TM福建电力与电工12ie d 2ne图2暂态调速动作流程图图3SIMAD YN D 机架图电机转速增长慢(电机转速反馈U n =αn 小),转速调节器的输入信号△U n =U ne -U n 大,转速调节器的输出信号U i e 很快就达到输出限幅值U i m ;该值作为电流调节器的输入值,使得触发装置的控制导通角电压增大,电机电枢电流随之迅速升高至可控硅的最大输出限幅值I dm ;在电机转速n=0调速至n=n e 给定值过程中,转速调节器处于饱和状态(U i e =U im ),系统表现为恒流调节特性,转速按线性规律加速上升至给定值;在电枢电流最大限幅值I dm 条件下,采用较快的时间响应参数,实现最短启动时间过程控制。
当电机转速上升至给定值后,转速调节器的给定值U n 与电机转速反馈U n 相等,转速调节器的输入信号△U n =0,但由于积分作用其输出值仍为限幅值U i m ;电机电枢电流仍保持为最大输出限幅值I d m 加速,电机转速超调。
当转速调节器的转速反馈值U n 大于给定值U ne 时,转速调节器的输入信号△U n 为一负偏差信号,转速调节器退出饱和工作区,其输出信号U i e 立即从限幅值下降,电机电枢电流I d 也随即下降,直至小于负载电流时,电机开始减速,直至系统进入速度无静差稳态状态为止。
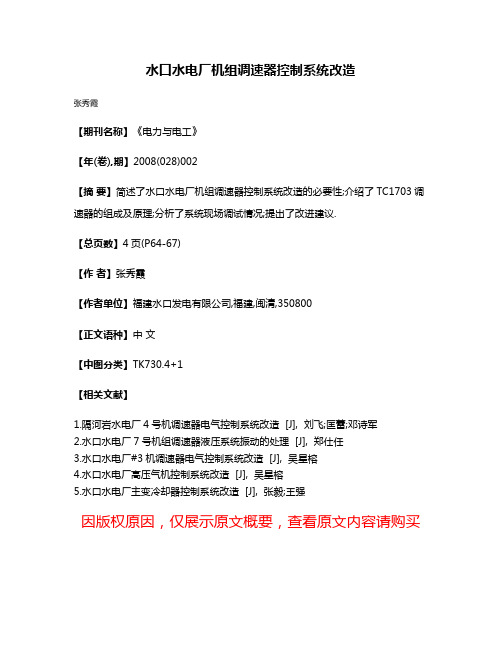
3西门子直流调速系统构成水口升船机的控制方式是每套拖动装置采用1台西门子SIM ADYN D 全数字控制器带1台SITOR 可控硅组件,SIM ADYN D 集中式布置。
SIMAD YN D 是一种全数字化、硬件/软件模块化、能够根据用户要求硬件自由配置、用户软件自由编程的多处理器并行工作的控制系统。
它将控制电机的每一项具体功能都制成模块化,不同的处理器板有不同的控制功能,可以根据实际控制要求进行几个处理板之间的在线连接,实现对电机的控制。
SIM ADYN D 控制器采用SR6型六槽机架,配置1块PT20M 和1块PT 20G 控制器模块,另配1块CS7通信模块。
SIM ADYN D 机架图见图3。
由CS7模块上配置的3只SS5通信子模块联网构成整个系统的3个通信,其中“1”与S5-135U 可编程控制器通信,“2”为4个SIMADYN D 模块之间的通信,“3”与O 操作面板通信。
SIM DYN D 与外部设备等之间的信号交换不是直接与插件板进行的,而是通过接口板与插件板相接的。
接口板装在机架下面的安装轨道上,并且经预置的嵌入电缆同插件板相接。
根据其作用来分类,主要有:仅起插接头转化作用的接口板,如SU10、SU12等;起二进制信号输入/输出作用的接口板,如SB10、SB61、SB70等;其他专用接口板SE20.2、SE21.2等。
在水口升船机中主要用SU10、SB61、SB70,用来输入制动器状态、风扇状态、行程设定点信号、转速等变量。
SITO R 中采用全控B6C 桥式电路,它有6个可控硅,可以用来整流和逆变,在逆变工作区,遵守逆变稳定极限。
为了节省可控硅的数量,在不需要逆变工作时,B6电路也可以由3个二极管和3个可控硅管组成。
SIM ADYN D 中通过附表所示模块完成仿真,P2A图6不同比例参数下的转速时间曲线并由SITOR 电流调节器来控制电枢电流。
4参数优化逻辑问题是升船机运行中存在的主要问题,有关拖动部分,实质上只是解决了启动、停机、快停、制动等命令的逻辑问题,不涉及调速问题。
这阶段的调试是无负载,或者说负载很小。
只有当升船机在现场拼装完毕后,才产生了这些问题。
在初始阶段,空船厢与平衡重的负载关系无法确定,需要主拖有很强的适应能力,通过它来“测出”偏载。
随后进入有水调试阶段,在承船厢载满水后,整个系统发生了很大变化,船厢有了很大的机械变形,钢丝绳卷筒上的摩擦力也数倍增加。
虽然对于主拖动的运行工况无明显变化,但在启动和制动时,惯性的作用大大加速,在快速停机时表现特别明显,有明显的速度超调现象,超过了设计指标5%。
在高速运行时尤其明显,虽然采用了自适应控制,但参数很明显与实际状况不匹配,这样就给安全运行带来隐患,因此需要通过试验来更改参数,解决超调问题。
在SIM ADYN D 中是通过PIC201模块来完成PI 调节的,调节后的参数加到电流设定值。
图4所示为PIC201模块,左侧为输入,右侧为输出,N2是标么值标准信号类型,B1是二进制信号类型,R2表示为倒数类型。
W 1是设定值1,W 2是设定值2,X 1、X 2分别是实际值1、2,W P 是预加值,L U 、L L 分别是上限和下限值,S V 是积分初始设定值,K P 是增益参数设定值,T N 是复位时间,I C 为积分控制器是否有效设定值。
Y 是输出值(Y n 为n 点的输出值,Y n-1为n-1点的输出值),T A 为采样时间,YE 为系统偏移量(YE n 为n 点的系统偏移量,YE n-1为n-1点的系统偏移量),Y I 为积分值,Q U 为上限控制器,Q L 为下限控制器。
PIC201为通用的PI 控制器,解算时间131μs 在SIM ADYN D 中经常采用,其计算公式为:YE=(W 1+W 2)-(X 1+X 2)Y n =Y n-1+K P [(1+T A T N)YE n -YE n -YE n -1]通过对非线性模块进行设定来设置比例设定值,其模块如图5所示。
PL I6主要用来模拟非线性参数,解算时间52μs ,其中(A 1,B 1),(A 2,B 2)……为类似(X 1,Y 1),(X 2,Y 2)……的坐标,各点连线为所设置曲线,通过此模块或PLI20(含20个点)模拟磁通—电流曲线、自然对数曲线等。
在此处SIMADYN D 中为增益参数输入,原先的增益参数输入曲线是(0,0.5),(0.2,0.5),(0.7,1.5),(2,1.5),(198,1.5)(199,1.5),只适应惯性较小的地方。
在水的重量增加以后,惯性增大很多,且水为流体,与平衡重等刚性物体有不同的物理特性,如果过大增加增益参数,由于在快停或紧急制动时水体的振荡作用,会加剧振荡效果,使动态性能图I 模块示意图图5PLI6模块示意图(下转第3页)4P C2019子导线所受的电磁力很大,当子导线局部所受电磁力大于该局部子导线自重时,局部粘连便会出现。
分裂子导线某一点产生粘连后,紧靠粘连点的子导线之间的距离已很小,在电磁力的作用下,粘连不断延伸,直至悬挂点处,在金具的刚性间隔作用下,各种合力在该处取得平衡,粘连才停止。
导线粘连部分之间的距离非常小,负荷较大时,2根子导线间的电磁吸引力非常大,即使在大风的天气下也不容易分开,但大部分在负荷降低并在外来较大风力作用下,会自行分开。
在大风作用下,间距不符要求的杆段子导线间存在小振幅的不同步舞动,可使子导线的间距更小,以致在较大负荷电流作用下出现子导线相吸而粘连,这一点从现场观察的子导线粘连的外因得以印证,即子导线间距较小、大档距或处风口的杆段发生粘连的概率较大。
高压输电线路子导线粘连的问题是近1—2a才较多地暴露出来,其诱因是重载输电线路的不断增加,因此,输电线路输送容量的增加是子导线粘连的重要因素。
今后,随着电网负荷的不断增加,受线路走廊资源的限制,提高现有输电线路输送容量是必然的趋势,对子导线粘连问题必须予以高度重视,并制定有关解决子导线粘连的办法。