Design of autopilot for BTT UUV based on H∞ Control theory
Design and Implementation of a Bionic Robotic Hand
Design and Implementation of a Bionic Robotic Hand with Multimodal Perception Based on ModelPredictive Controlline 1:line 2:Abstract—This paper presents a modular bionic robotic hand system based on Model Predictive Control (MPC). The system's main controller is a six-degree-of-freedom STM32 servo control board, which employs the Newton-Euler method for a detailed analysis of the kinematic equations of the bionic robotic hand, facilitating the calculations of both forward and inverse kinematics. Additionally, MPC strategies are implemented to achieve precise control of the robotic hand and efficient execution of complex tasks.To enhance the environmental perception capabilities of the robotic hand, the system integrates various sensors, including a sound sensor, infrared sensor, ultrasonic distance sensor, OLED display module, digital tilt sensor, Bluetooth module, and PS2 wireless remote control module. These sensors enable the robotic hand to perceive and respond to environmental changes in real time, thereby improving operational flexibility and precision. Experimental results indicate that the bionic robotic hand system possesses flexible control capabilities, good synchronization performance, and broad application prospects.Keywords-Bionic robotic hand; Model Predictive Control (MPC); kinematic analysis; modular designI. INTRODUCTIONWith the rapid development of robotics technology, the importance of bionic systems in industrial and research fields has grown significantly. This study presents a bionic robotic hand, which mimics the structure of the human hand and integrates an STM32 microcontroller along with various sensors to achieve precise and flexible control. Traditional control methods for robotic hands often face issues such as slow response times, insufficient control accuracy, and poor adaptability to complex environments. To address these challenges, this paper employs the Newton-Euler method to establish a dynamic model and introduces Model Predictive Control (MPC) strategies, significantly enhancing the control precision and task execution efficiency of the robotic hand.The robotic hand is capable of simulating basic human arm movements and achieves precise control over each joint through a motion-sensing glove, enabling it to perform complex and delicate operations. The integration of sensors provides the robotic hand with biological-like "tactile," "auditory," and "visual" capabilities, significantly enhancing its interactivity and level of automation.In terms of applications, the bionic robotic hand not only excels in industrial automation but also extends its use to scientific exploration and daily life. For instance, it demonstrates high reliability and precision in extreme environments, such as simulating extraterrestrial terrain and studying the possibility of life.II.SYSTEM DESIGNThe structure of the bionic robotic hand consists primarily of fingers with multiple joint degrees of freedom, where each joint can be controlled independently. The STM32 servo acts as the main controller, receiving data from sensors positioned at appropriate locations on the robotic hand, and controlling its movements by adjusting the joint angles. To enhance the control of the robotic hand's motion, this paper employs the Newton-Euler method to establish a dynamic model, conducts kinematic analysis, and integrates Model Predictive Control (MPC) strategies to improve operational performance in complex environments.In terms of control methods, the system not only utilizes a motion-sensing glove for controlling the bionic robotic hand but also integrates a PS2 controller and a Bluetooth module, achieving a fusion of multiple control modalities.整整整整如图需要预留一个图片的位置III.HARDWARE SELECTION AND DESIGN Choosing a hardware module that meets the functional requirements of the system while effectively controlling costs and ensuring appropriate performance is a critical consideration prior to system design.The hardware components of the system mainly consist of the bionic robotic hand, a servo controller system, a sound module, an infrared module, an ultrasonic distance measurement module, and a Bluetooth module. The main sections are described below.A.Bionic Mechanical StructureThe robotic hand consists of a rotating base and five articulated fingers, forming a six-degree-of-freedom motion structure. The six degrees of freedom enable the system to meet complex motion requirements while maintaining high efficiency and response speed. The workflow primarily involves outputting different PWM signals from a microcontroller to ensure that the six degrees of freedom of the robotic hand can independently control the movements of each joint.B.Controller and Servo SystemThe control system requires a variety of serial interfaces. To achieve efficient control, a combination of the STM32 microcontroller and Arduino control board is utilized, leveraging the advantages of both. The STM32 microcontroller serves as the servo controller, while the Arduino control board provides extensive interfaces and sensor support, facilitating simplified programming and application processes. This integration ensures rapid and precise control of the robotic hand and promotes efficient development.C.Bluetooth ModuleThe HC-05 Bluetooth module supports full-duplex serial communication at distances of up to 10 meters and offers various operational modes. In the automatic connection mode, the module transmits data according to a preset program. Additionally, it can receive AT commands in command-response mode, allowing users to configure control parameters or issue control commands. The level control of external pins enables dynamic state transitions, making the module suitable for a variety of control scenarios.D.Ultrasonic Distance Measurement ModuleThe US-016 ultrasonic distance measurement module provides non-contact distance measurement capabilities of up to 3 meters and supports various operating modes. In continuous measurement mode, the module continuously emits ultrasonic waves and receives reflected signals to calculate the distance to an object in real-time. Additionally, the module can adjust the measurement range or sensitivity through configuration response mode, allowing users to set distance measurement parameters or modify the measurement frequency as needed. The output signal can dynamically reflect the measurement results via level control of external pins, making it suitable for a variety of distance sensing and automatic control applications.IV. DESIGN AND IMPLEMENTATION OF SYSTEMSOFTWAREA.Kinematic Analysis and MPC StrategiesThe control research of the robotic hand is primarily based on a mathematical model, and a reliable mathematical model is essential for studying the controllability of the system. The Denavit-Hartenberg (D-H) method is employed to model the kinematics of the bionic robotic hand, assigning a local coordinate system to each joint. The Z-axis is aligned with the joint's rotation axis, while the X-axis is defined as the shortest distance between adjacent Z-axes, thereby establishing the coordinate system for the robotic hand.By determining the Denavit-Hartenberg (D-H) parameters for each joint, including joint angles, link offsets, link lengths, and twist angles, the transformation matrix for each joint is derived, and the overall transformation matrix from the base to the fingertip is computed. This matrix encapsulates the positional and orientational information of the fingers in space, enabling precise forward and inverse kinematic analyses. The accuracy of the model is validated through simulations, confirming the correct positioning of the fingertip actuator. Additionally, Model Predictive Control (MPC) strategies are introduced to efficiently control the robotic hand and achieve trajectory tracking by predicting system states and optimizing control inputs.Taking the index finger as an example, the Denavit-Hartenberg (D-H) parameter table is established.The data table is shown in Table ITABLE I. DATA SHEETjoints, both the forward kinematic solution and the inverse kinematic solution are derived, resulting in the kinematic model of the ing the same approach, the kinematic models for all other fingers can be obtained.The movement space of the index finger tip is shownin Figure 1.Fig. 1.Fig. 1.The movement space at the end of the index finger Mathematical Model of the Bionic Robotic Hand Based on the Newton-Euler Method. According to the design, each joint of the bionic robotic hand has a specified degree of freedom.For each joint i, the angle is defined as θi, the angular velocity asθi, and the angular acceleration as θi.The dynamics equation for each joint can be expressed as:τi=I iθi+w i(I i w i)whereτi is the joint torque, I i is the joint inertia matrix, and w i and θi represent the joint angular velocity and acceleration, respectively.The control input is generated by the motor driver (servo), with the output being torque. Assuming the motor input for each joint is u i, the joint torque τi can be mapped through the motor's torque constant as:τi=kτ∙u iThe system dynamics equation can be described as:I iθi+b iθi+c iθi=τi−τext,iwhere b i is the damping coefficient, c i is the spring constant (accounting for joint elasticity), and τext,i represents external torques acting on the joint i, such as gravity and friction.The primary control objective is to ensure that the end-effector of the robotic hand (e.g., fingertip) can accurately track a predefined trajectory. Let the desired trajectory be denoted as y d(t)and the actual trajectory as y(t)The tracking error can be expressed as:e(t)=y d(t)−y(t)The goal of MPC is to minimize the cumulative tracking error, which is typically achieved through the following objective function:J=∑[e(k)T Q e e(k)]N−1k=0where Q e is the error weight matrix, N is the prediction horizon length.Mechanical constraints require that the joint angles and velocities must remain within the physically permissible range. Assuming the angle range of the i-th joint is[θi min,θi max]and the velocity range is [θi min,θi max]。
无人驾驶汽车英语PPT课件

Urban transportation services
1 2 3
Robotaxi
Autonomous taxi service, providing efficient and safe point-to-point travel.
Autonomous Public Transport
It enables scheduled and scheduled public transportation services by driving buses or subways automatically.
• Millimeter wave radar: Utilizing electromagnetic waves in the millimeter wave band for detection, it can operate under harsh weather conditions and measure the speed and distance of objects.
01
solves the problem of "last mile" delivery in cities
through autonomous driving.
Autonomous Trucking
02
Automated long-distance freight transportation to
• Transfer learning: Transfer the knowledge learned in one task to other related tasks, accelerating model training and improving performance.
外文翻译-基于AT89C2051 的智能型汽车防撞报警器的设计
An AT89C2051 Based Intelligent Proxim ityWarning Indicator for Automobile It introduces the function and characteristicsofm icrocontrollerAT89C2051 Based on it. A low cost high-accuracy microm iniaturization and digital display proxim ity warning indicator for automobile is designed. The indicatormeasures the distance and speed of the automobile, with ultrasonicwave and integrated Hall unit and controls the system by the real-time control and Data-processing of the microcontroller Moreover. its circuitry principle is introduced in detail as well as its software design.Along with modern rhythm of life speeding up, the frequency which the traffic accident occurred is increasing, for enhances the security of automobile movement. This article introduced one kind of alarm system based on monolithic integrated circuit controls the automobile guards against hitting. This equipment the monolithic integratedcircuit real-time control and the data processing function, with the ultrasonic wave range finder technology, the sensor technologyunifies, may examine in the automobile movement rear area the obstacle and the automobile distance and the automobile vehicle speed, reveals the installment demonstration distance through the number, and is away from far and near the situation by the sound production electriccircuit basis to send out the warning sound.The ultrasonic ranging principle is, after unceasingly examines the ultrasonic wave launch to meet the echo which the obstacle reflects, thus determines the launch ultrasonic wave and receives the echo the time difference. Then extracts is away from S=C×T/2, C is the ultrasonic wave wave velocity, under the normal temperature takes is 344 m/s. After sonic speed determination, so long as obtains the ultrasonic wave round-trip the time, then obtains the distance.The automobile vehicle speed survey is integrates the sensor through Hall to realize. Namely, is loaded with the permanent magnet the turntable input axis and the wheel revolution axis is connected, when the wheel rotates, the turntable along with it rotation, this time, on the turn table permanent magnet can integrate the sensor after Hall, thus integrates the sensor in Hall the input end to obtain a magnetism signal, if the turntable does not stop the rotation, Hall integratesthe sensor then to be able to output the rotational speed signal. It can be said that, to the automobile vehicle speed survey essence into the rotational speed signal frequency survey.AT89C2051 is a low power loss, the high performance 8 CMOS microprocessor, is compatible with the MCS-51 series instruction collection and the pin, has following characteristic: 128 bytes internal RAM, 2 K bytes EPROM, fifteen I/O line, two sixteen-fixed time counters, five two-level of interrupt sources, one entire duplex serial port, internal precisely simulates the comparator and internal swingming, the low power loss leaves unused and falls the electricity pattern. The working voltage scope 4.25 ~ 5.5 V, the operating frequency takes12 MHz.In AT89C2051, two sixteen-fixed time/counters registers is T0and T1, make fixed time/counters, may count the machine cycle, counts the frequency for the oscilation frequency 1/12; When makes the counter, may appears to on exterior input pin P3.4/T0 and P3.5/T1 from 1 to 0 changes when increase 1, counts the frequency for the oscilation frequency 1/24.This alarm apparatus is made up of the control system, the ultrasonic wave transmission circuit, the accepting circuit, measured the fastelectric circuit, the alarm circuit, the LED display circuit etc.The ultrasonic wave launch electricity route CC7555 time base circuitand the ultrasonic wave launch pokes head into compose. The monolithic integrated circuit AT89C2051 pin controls the P1.7pin to control the CC7555 time base circuit to produce the 40kHz frequency code for the ultrasonic generator, pokes head in the ultrasonic wave Launch obstacle by the ultrasonic wave which launches. Has the characteristic below using the ultrasonic ranging: high survey sensitivity, strong penetrating power, quick survey speed, the big survey angleis, in the correlation wide range object carries on the examination.The supersonic reception electric circuit is composed of pokes head in, the amplifier band the shaper circuit. The ultrasonic wave reflects which by the obstacle pokes head in after the receive, to transform for the electricity pulse signal, again after the amplifier, the shaper enlargement and the reshaping sends in the P3.2pin. of AT89C2051. The amplifier suitably selects has the enough gain and the lower noise wide band amplifier, maintains the pulse signal fron tnot to have the distortion in particular, enhances the range finder the precision.Measured the fast electric circuit is composed of the sensor, the pulse amplifier, the shaper, the CC7555 time base signal circuit, the gate. Hall integrates the sensor to turn the wheel rotational speed signal the pulse signal output, after the enlargement, the reshaping electric circuit sends in the gate, produces unit time base signal control gate opening by the CC7555 time base circuits with to shut, controls the rotational speed signal in the unit time through the gate, sends in monolithic integrated circuit the P3.5 pin of AT89C2051, controlled theT1 counter to count, has realized in unit time counting.The alarm circuit is composed of the CC7555 electric circuits and the speaker. The P1.6 pin of AT89C2051 controls the CC7555 electric circuit basis measurement result, produces the certain frequency signal actuation speaker to send out reports to the police the sound. Sends out when the speaker reports to the police the sound, time base circuit CC7555 is in temporarily the stable state, this time power source to electric capacity charge, thus causes CC7555 to end temporarily the stablestate to reply the steady state, outputs the low level, causes the speaker to stop sending out reports to the police the sound, produces newly until the next range finder conclusion reports to the police the sound.The LED display circuit is composed of the digital tube and the actuation electric circuit. With two digital tubes demonstration distance, the digital tube uses the static state to demonstrate that, by the chip MCS14495 actuations demonstrations, P1.4, P1.5 separately saves the signal as the actuation chip MCS14495 locks, uses in BCD which controls produces (Binar Code Decimal), the binarycode expression tens digit is demonstrates the top digit or the lowposition.The AT89C2051 mainly completes the procedure the execution,data processing and to exterior electric circuit real-time control.Internal timer T0 work in fixed time way, when ultrasonic wave launch starts to count, after pin P3.2receives the echo,stops counting, T0 times namely for the ultrasonic wave round-trip transmission time, the monolithic integrated circuit carries on processing to this data, then determines the distance.The internal timer T1 work is counting the way, counts by P3.5pin input pulse signal control T1, counts the value by T1 to determine the automobile the rotational speed. The monolithic integrated circuit basis measured is away from and the vehicle speed carries on thecomparison, judges whether actuates the alarm circuit to report to thepolice, like hypothesis: When the vehicle speed is smaller or equal to 30km/s, the safe distance should be bigger than is equal to 1m; When the vehicle speed is smaller or equal to 80 km/s, the safe distance should be bigger than is equal to 2m; When the vehicle speed is bigger than 80 km/ s, the safe distance should bebigger than is equal to 5m .This installment control software must complete the system initialization, the control trigger pulse signal launch and the receive, according to fixed time the count-down obstacle distance, according to counts the frequency computation automobile vehicle speed, judges measured is away from whether in the margin for safety which the vehicle speed corresponds, and according to calculates has the BCD code and the corresponding frequency pulse signal with the judgement result, actuates the display circuit and the sound production electric circuit基于AT89C2051 的智能型汽车防撞报警器的设计本文介绍了AT89C2051 单片机的性能及特点,及以其为核心的一种低成本、高精度、微型化、数字显示的汽车防撞报警器。
无人驾驶英语PPT

Motion Planning
It determines the specific actions, including acceleration, braking, and steering, that the vehicle needs to take along the planned path
Global Path Planning
This technique plans a complete route for the vehicle from the start to the destination, considering all possible traffic scenarios and objectives
要点二
Semantic Segmentation
It allows the vehicle to understand the scene in detail by assigning semantic means to different parts of the environment
要点三
3D Reconstruction
Level 4
High automation The vehicle can handle most or all driving tasks without human intervention, but limited to specific geographic regions and weather conditions.
Public transportation
Autonomous vehicles can be used for shared rides, shuttle services, or even fully automated bus systems, providing effective and sustainable transportation options for urban areas
基于STM32的低碳避障实验小车电控设计

ISSN 1002-4956 C N H-2034/T实验技术与管理Experim ental Technology and Management第34卷第12期2017年12月Vol. 34 No. 12 Dec. 2017DOI:10. 1 6791 / . cnki. sjg.201 7. 12.011基于S TM32的低碳避障实验小车电控设计董靖川,张朝,温洋,窦一喜,赵鹏飞,王星(天津大学机械工程学院,天津300354)摘要:采用单片机为核心的控制电路实现智能避障和能量管理。
电控部分以ST M32F103C8T6型32位A R M单片机为核心,配置了转向舵机、离合器舵机作为执行元件,并通过超声波传感器组、光电测速传感器、M E M S陀螺仪作为反馈元件,控制小车运行的轨迹和速度。
充分利用S T M32单片机内置的硬件定时器、U S A R T及中断功能实现了舵机的P W M控制及超声波测距、陀螺仪读数、测速等功能。
测试表明,低碳避障实验小车的电控装置原理直观、接口丰富、编程方便、操作简单、运行可靠,能够满足机电工程类课程的创新实验和工程实践的教学需求。
关键词:低碳小车;S T M32;超声波测距;舵机中图分类号:TP273 文献标识码:A 文章编号:1002-4956(2017) 12-0045-05Design on electric control for low-carbon and obstacl--avoidingexperimental car based on STM32D o n g Jin g c h u a n,Z h a n g Z h a o,W e n Y a n g,D ou Y ix i?Z h a o P e n g f e i,W a n g X in g(School of Mechanical Engineering,Tianjin U niversity,T'ianjin 300354, China.)Ab str a c t:By using SCM as the core control circuit,the intelligent obstacle avoidance and the energy management arc realized. The electric control system is based on the STM32F103C8T6 32-bitA R M SCM asthe core. T'he s teering gear and the clutch actuator are configured as the actuating elements,and by using the ultrasonic sensor g roup, photoelectric speed sensor and M EM S gyroscope as the feedback elements,the carrunning trajectory and speed are controlled. The functions such as th e P W M control of the steering gear and ultrasonic distance m easuring,gyroscope reading,speed m easurem ent,e t c.,are realized by using the S SCM built-in hardware tim er,U SA R T and interruptive function. The test shows that th e p rin c ip electronic control device of the carbon-free obstacle-avoiding experimental car is intuitive,the interface is rich,the programming is c onvenient,and the operation is simple and reliable,which can meet the teaching needs ofthe innovative experiment and engineering practice for the mechanical and electrical engineering K e y wo r d s:low-carbon car; S T M32; ultrasonic distance measuring;steering gear智能避障小车系统属于一种简单的轮式机器人[1],可广泛应用于物流运输[2]、室内清洁[3]、环境监测[4]、目标搜寻[5]等各种工业及日常生活场合。
基于BTT控制的UUVH鲁棒自动驾驶仪设计
则有 : T T )=-R-1 ) u( t BP x +R-1 B g( t 式中 : P 为下面代数矩阵方程的解 .
( ) 1 0
T ) C =0 ( P A +ATP -P B R-1 B P +CTQ 1 1 ) 为趋于一个常数向量与参考输入的乘 t g( 积. 1 - T )≈- [ ( ) t A -B R-1 B P] C z 1 2 g( Q 代入某型 UUV 参数 , 可得 r=1 0, 令q=1,
得到了一种简单有效的鲁棒控制器 . 行单独设计 ,
1 基 于 B T T 控 制 的 UUV 数 学 模 型
通 为了 UUV 自 动 驾 驶 仪 设 计 与 分 析 方 便 , , 常在工程上作 些 简 化 与 假 设 得 到 UUV 的 3 通 ) ) 道数学模型见式 ( 1 3 . ~( 横滚通道 :
T
则根 据 假 定 条 件 及 式 2, B T TUUV 俯 仰 ωy ] , ωx 通道状态方程可表示为 ( ) x +B w +B u 1 3 x =A 1 2 式中 :
α -k α 燄 ' α α / k k n ω z y , 0
熿
α k α
ω α z ' -k n αk y ω z k ω z
T 2 / ATP +P A +CTC +P( B B γ - 1 1
图 3 横滚通道控制系统结构图
B D D) B ) P +ε I =0 2(
T T 2
( ) 8
3. 2 俯仰通道自动驾驶仪设计 俯仰通道自动驾驶仪设计目标是保证雷体纵
式中 : ε 为一小正数 .
·1 3 1 2·
武汉理工大学学报 ( 交通科学与工程版 )
A Safety-Based Decision Making Architecture for Autonomous Systems
plans the
for performing safety of both
in an autonomous that a plan
system. will violate
self-information
will be introduced.
i i
reflection
the probability
specification,
This measure is analogous to the reliability self-information by Mclnroy and Saridis, but includes weighting of task conto provide a measure of both reliability and cost. An example the safety self-information is used as a decision robot controller. The safety self-information is with the entropy-based Theory of Intelligent
is concerned the with on minimizing potential
Systems
selecting risk a plan to the
Safety system. obtained system random
for executing
= i
The analysis is probabilistic from sensors and contained controller variable. contains Safety a degree analysis
三自由度机械手毕业设计

摘要机械手是在自动化生产过程中使用的一种具有抓取和移动工件功能的自动化装置,由其控制系统执行预定的程序实现对工件的定位夹持。
完全取代了人力,节省了劳动资源,提高了生产效率。
本设计以实现铣床自动上下料为目的,设计了个水平伸缩距为200mm,垂直伸缩距为200mm具有三个自由度的铣床上下料机械手。
机械手三个自由度分别是机身的旋转,手臂的升降,以及机身的升降。
在设计过程中,确定了铣床上下料机械手的总体方案,并对铣床上下料机械手的总体结构进行了设计,对一些部件进行了参数确定以及对主要的零部件进行了计算和校核。
以单片机为控制手段,设计了机械手的自动控制系统,实现了对铣床上下料机械手的准确控制。
关键词:机械手;三自由度;上下料;单片机AbstractManipulator , an automation equipment with function of grabbing and moving the workpiece ,is used in an automated production process.It perform scheduled program by the control system to realize the function of the positioning of the workpiece clamping. It completely replace the human, saving labor resources, and improve production efficiency.This design is to achieve milling automatic loading and unloading .Design a manipulator with three degrees of freedom and 200mm horizontal stretching distance, 120mm vertical telescopic distance. Three degrees of freedom of the manipulator is body rotation, arm movements, as well as the movements of the body. In the design process, determine the overall scheme of the milling machine loading and unloading manipulator and milling machine loading and unloading manipulator, the overall structure of the design parameters of some components as well as the main components of the calculation and verification. In the means of Single-chip microcomputer for controlling, design the automatic control system of the manipulator and achieve accurate control of the milling machine loading and unloading.Key words: Manipulator; Three Degrees of Freedom; Loading and unloading; single chip microcomputer目录摘要.........................................................................I第1章绪论.............................................................11.1选题背景................................................... (1)1.2设计目的.........................................................11.3国内外研究现状和趋势............................................21.4设计原则.........................................................2第2章设计方案的论证..................................................32.1 机械手的总体设计...............................................32.1.1机械手总体结构的类型....................................32.1.2 设计具体采用方案........................................42.2 机械手腰座结构设计.............................................52.2.1 机械手腰座结构设计要求.................................52.2.2 具体设计采用方案........................................52.3 机械手手臂的结构设计...........................................62.3.1机械手手臂的设计要求....................................62.3.2 设计具体采用方案........................................72.4 设计机械手手部连接方式.........................................72.5 机械手末端执行器(手部)的结构设计...........................82.5.1 机械手末端执行器的设计要求.............................82.5.2 机械手夹持器的运动和驱动方式..........................92.5.3 机械手夹持器的典型结构.................................92.6 机械手的机械传动机构的设计..................................102.6.1 工业机械手传动机构设计应注意的问题...................102.6.2 工业机械手传动机构常用的机构形式.....................102.6.3 设计具体采用方案.......................................122.7 机械手驱动系统的设计.........................................122.7.1 机械手各类驱动系统的特点..............................122.7.2 机械手液压驱动系统.....................................132.7.3机身摆动驱动元件的选取................................132.7.4 设计具体采用方案.......................................142.8 机械手手臂的平衡机构设计.....................................14第3章理论分析和设计计算............................................163.1 液压传动系统设计计算..........................................163.1.1 确定液压传动系统基本方案...............................163.1.2 拟定液压执行元件运动控制回路...........................173.1.3 液压源系统的设计........................................173.1.4 确定液压系统的主要参数.................................173.1.5 计算和选择液压元件......................................243.1.6机械手爪各结构尺寸的计算...................................26 第4章机械手控制系统的设计..........................................284.1 系统总体方案..................................................284.2 各芯片工作原理................................................284.2.1 串口转换芯片............................................284.2.2 单片机...................................................294.2.3 8279芯片...............................................304.2.4 译码器...................................................314.2.5 放大芯片................................................324.3 电路设计..................................................334.3.1 显示电路设计............................................334.3.2 键盘电路设计............................................334.4 复位电路设计..................................................334.5 晶体振荡电路设计.............................................344.6 传感器的选择..................................................34结论.....................................................................36致谢.....................................................................37参考文献................................................................38CONTENTS Abstract (I)Chapter 1 Introduction (1)1.1 background (1)1.2 design purpose (1)1.3 domestic and foreign research present situation and trends (2)1.4 design principles (2)Chapter 2 Design of the demonstration (3)2.1manipulator overall design (3)2.1.1 manipulator overall structure type (3)2.1.2 design adopts the scheme (4)2.2 lumbar base structure design of mechanical hand (5)2.2.1 manipulator lumbar base structure design requirements (5)2.2.2specific design schemes (5)2.3mechanical arm structure design (6)2.3.1 manipulator arm design requirements (6)2.3.2 design adopts the scheme (7)2.4 design of mechanical hand connection mode (7)2.5 the manipulator end-effector structure design (8)2.5.1 manipulator end-effector design requirements (8)2.5.2 manipulator gripper motion and driving method (9)2.5.3 manipulator gripper structure (9)2.6 robot mechanical transmission design (10)2.6.1 industry for transmission mechanism of manipulator design shouldpay attention question (10)2.6.2 industrial machinery hand transmission mechanism commonlyused form of institution (10)2.6.3 design adopts the scheme (12)2.7 mechanical arm drive system design (12)2.7.1 manipulator of various characteristics of the drive system (12)2.7.2 hydraulic drive system for a manipulator (13)2.7.3 Body swing the selection of drive components (13)2.7.4 Design the specific use of the program (14)2.8 mechanical arm balance mechanism design (14)Chapter 3 Theoretical analysis and design calculation (16)3.1 hydraulic system design and calculation (16)3.1.1 the basic scheme of hydrauic transmission system (16)3.1.2 formulation of the hydraulic actuator control circuit (17)3.1.3 hydraulic source system design (17)3.1.4 determine the main parameters of the hydraulic system (17)3.1.5 calculation and selection of hydraulic components (24)3.1.6 Manipulator calculation of the structural dimensions (26)Chapter 4 The robot control system design (28)4.1 Overall scheme (28)4.2 Chip works (28)4.2.1 serial conversion chip (28)4.2.2 MCU (29)4.2.3 8279 chip (30)4.2 .4 decoder (31)4.2.5 amplifier chip (32)4.3 Circuit design (33)4.3.1 show the circuit design (33)4.3.2 The keyboard circuit design (33)4.4 Reset circuit design (33)4.5 crystal oscillation circuit design (34)4.6 sensor selection (34)Conclusion (36)Acknowledgements (37)References (38)第1章绪论1.1选题背景机械手是在自动化生产过程中使用的一种具有抓取和移动工件功能的自动化装置,它是在机械化、自动化生产过程中发展起来的一种新型装置。
基于相平面的分布式驱动电动汽车稳定性控制

2021年(第43卷)第5期汽车工程Automotive Engineering2021(Vol.43)No.5基于相平面的分布式驱动电动汽车稳定性控制*钟龙飞,彭育辉,江铭(福州大学机械工程及自动化学院,福州350116)[摘要]为提高分布式驱动电动汽车的操纵稳定性,提出一种基于相平面法的行驶稳定性控制策略。
首先,建立非线性车辆2自由度模型,获得不同路面附着系数下车辆质心侧偏角相平面稳定域边界模型。
其次,基于质心侧偏角相平面设计分区域控制器,当车辆处于稳定域内时,采用模糊神经网络控制器来决策横摆力矩,使车辆跟随目标变量;当车辆处于稳定域外时,设计失稳度和模糊神经网络联合控制器决策总横摆力矩,使车辆恢复稳定。
最后,基于Simulink和CarSim仿真平台在蛇行绕桩和双移线工况下对稳定性控制方法进行仿真,并进行实车测试验证,结果证明了本文中所提控制策略的可行性和有效性。
关键词:电动汽车;行驶稳定性;相平面;分布式驱动;模糊神经网络;分区域控制器Stability Control of Distributed Driven Electric Vehicle Based on Phase PlaneZhong Longfei,Peng Yuhui&Jiang MingSchool of Mechanical Engineering and Automation,Fuzhou University,Fuzhou350116[Abstract]To improve the handling stability of a distributed driven electric vehicle,a driving stability con⁃trol strategy based on phase plane method is proposed.Firstly,a two degree⁃of⁃freedom nonlinear model for vehicle simulation is established to obtain the boundary model of phase plane stability region for vehicle centroid slip angle with different tire⁃road friction coefficients.Secondly,a regional controller based on the phase plane of centroid side⁃slip angle is designed to achieve the stability of vehicle.When the vehicle runs in the stability region,the yaw mo⁃mentum is determined by the fuzzy neural network controller to make the vehicle follow the target variable.When the vehicle runs out of the stability region,the yaw momentum is determined by a combined controller of instability and fuzzy neural network to restore the stability of the vehicle.Finally,by use of Simulink and CarSim software,the sta⁃bility control method is verified by simulation and on⁃road experiment under the condition of snaking driving around pile and double line change.The experimental results reveal the feasibility and effectiveness of the proposed control strategy.Keywords:electric vehicle;driving stability;phase plane;distributed driven;fuzzy neural net⁃work;regional controner前言在分布式驱动电动汽车横摆力矩的决策与控制研究中,主要有两种研究方法:第一种是基于线性2自由度车辆模型计算出理想横摆角速度和质心侧偏角,将其作为目标变量进行跟踪控制[1];第二种是基于轮胎非线性特性建立车辆动力学模型[2],通过横摆角速度和质心侧偏角相平面对车辆稳定性进行研究。
Reactive Navigation for Autonomous Guided Vehicle Using the Neuro-fuzzy Techniques
Reactive Navigation for Autonomous Guided Vehicle Using the Neuro-fuzzy TechniquesJin Cao, Xiaoqun Liao and Ernest HallCenter for Robotics Research, ML 72University of CincinnatiCincinnati, OH 45221ABSTRACTA Neuro-fuzzy control method for navigation of an Autonomous Guided Vehicle (AGV) robot is described. Robot navigation is defined as the guiding of a mobile robot to a desired destination or along a desired path in an environment characterized by a terrain and a set of distinct objects, such as obstacles and landmarks. The autonomous navigate ability and road following precision are mainly influenced by its control strategy and real-time control performance. Neural network and fuzzy logic control techniques can improve real-time control performance for mobile robot due to its high robustness and error-tolerance ability. For a mobile robot to navigate automatically and rapidly, an important factor is to identify and classify mobile robots’ currently perceptual environment. In this paper, a new approach of the current perceptual environment feature identification and classification, which are based on the analysis of the classifying neural network and the Neuro-fuzzy algorithm, is presented. The significance of this work lies in the development of a new method for mobile robot navigation.Keywords: mobile robot, navigation, neuro-fuzzy, neural network, fuzzy logic1. INTRODUCTIONThe general theory for mobile robotics navigation is based on a simple premise. For mobile robot to operate it must sense the known world, be able to plan its operations and then act based on this model. This theory of operation has become known as SMPA (Sense, Map, Plan, and Act).SMPA was accepted as the normal theory until around 1984 when a number of people started to think about the more general problem of organizing intelligence. There was a requirement that intelligence be reactive to dynamic aspects of the unknown environments, that a mobile robot operate on time scales similar to those of animals and humans, and that intelligence be able to generate robust behavior in the face of uncertain sensors, unpredictable environments, an a changing world. This led to the development of the theory of reactive navigation by using Artificial Intelligence (AI).Reactive Navigation differs from Planed Navigation in that, while a mission is assigned or a goal location is known, the robot does not plan its path but rather navigate itself by reacting to its immediate environment in real time.There are various approaches to Reactive Navigation, but the main concerned issue for all developer is that robust autonomous performance can be achieved by using minimal computational capabilities, as opposed to the enormous computational requirements of path planning techniques.Designers of Reactive Navigation systems oppose the traditional robotics and Artificial Intelligence (AI) philosophy: that a robot must have a "brain", where it retains a representation of the world. Furthermore, they discard the idea that there are three basic steps for the robot to achieve its "intelligent" task: perception, world modeling and action. Robots based on this paradigm spend an excessive time in creating a world model before acting on it. Reactive methods seek to eliminate the intermediate step of world modeling.Based on the above thinking, reactive methods share a number of important features. First, sensors are tightly coupled to Actuators through fairly simple computational mechanisms. Second, complexity is managed by decomposing the problem according to tasks rather than functions. Then, reactive systems tend to evolve as layered systems. This is where most disagreement occurs between the different researchers.The autonomous mobile robot, the Bearcat II as shown in Figure 1., which has been used in this research, was designed by 99’ UC Robot Team for the 1999 Automated Unmanned Vehicle Society competition (AUVS) sponsored by the Autonomous Unmanned Vehicle Society, the U.S. Army TACOM, United Defense, the Society of Automotive Engineers, Fanuc Robotics and others. The vehicle is constructed of an aluminum frame designed to hold the controller, obstacle avoidance, vision sensing, vehicle power system, and drivecomponents. Two independently drivenDC motors are used for vehiclepropulsion as well as for vehiclesteering. Also, all the subsystem levelcomponents have been chosen to bemodular in design and independent interms of configuration so as to increaseadaptability and flexibility. This enablesreplacing of existing components withmore sophisticated or suitable ones, asthey become available.Figure 1. The Bearcat II mobile robotThe navigation system takes range data as input, processes it in order to find regions that can safely drive over, and generates commands for steering the vehicle based on thedistributions of these untraversable regions. The system is set up as a reactive system in that it outputs steering commands frequently instead of planning long trajectories ahead. Alessandro [1], M. Delgado et al, [2] gave an excellent discussion of how fuzzy computation techniques have been used in the mobile robot to address some of the difficult issues of autonomous navigation. D. Kontoravdis et al [3] present a fuzzy neural approach for the mobile robot navigation in their paper. 1999 UC Robot Team [4] describes the overall design of the UC mobile robot.The purpose of this paper is to describe a Neuro-fuzzy control method for the navigation of an AGV robot. An overall system design and development is presented in the Section 2. The Neuro-fuzzy computation and it’s application for mobile robot navigation are discussed in the Section 3. The conclusion and further work are given in the Section 4.2. SYSTEM DESIGNThe system that is to be controlled is an electrically propelled mobile vehicle named Bearcat II, which is a sophisticated, computer controlled, and intelligent system. The adaptive capabilities of a mobile robot depend on the fundamental analytical and architectural designs of the sensor systems used. The mobile robot provides an excellent test bed for investigations into generic vision guided robot control since it is similar to an automobile and is a multi-input, multi-output system. The major components of the robot are: vision guidance system, steering control system, obstacle avoidance system, speed control, safety and braking system, power unit and the supervisor control PC.By autonomous robot navigation we mean the ability of a robot to move purposefully and without human intervention in environments that have not been specifically engineered for it. Autonomous navigation requires a number of heterogeneous capabilities, including the ability to execute elementary goal-achieving actions, like reaching a given location; to reach in real time to unexpected events, like the sudden appearance of an obstacle; to determine the robot’s position; and to adapt to changes in the environment.Figure 2 is a brief description on the design and development of the navigation system of the mobile robot.Visual Sensor SystemVisual information is converted to electrical signals by the use of visual sensors. The most commonly used visual sensors are cameras. Despite the fact that these cameras posses undesirable characteristics, such as noise and distortion that frequently necessitate readjustments, they are used because of their ease of availability and reasonable cost. Vision sensors are critically dependent on ambient lighting conditions and their scene analysis and registration procedures can be complex and time-consuming.Figure 2. The mobile robot navigation systemThe Control Of Mobile RobotThe control of mobile robots by means of sensory information is a fundamental problem in robotics. As shown in Figure 3, the robot is controlled by selecting desired angularvelocity for each of two driving wheels. One castor wheel in the rear part of the robot can turn freely and thus does not determine the robot’s movements.The purpose of the vision guidance system is to obtain information from the changing environment of the obstacle course, which is usually bounded by solid as well as dashed lines. Two JVC CCD cameras are used for following the left and right lines. Only one line is followed at a time.Left CameraJVC Right CameraJVCMAXIMVideo Switch ISCANLogic Controller Galil Controller A/D Converter PID ControllerD/A Converter LeftAmplifierRightAmplifierVision Tracking - +- +Left MotorRight MotorFigure 3. The mobile robot motionThe ISCAN image-tracking device is used for image processing. This device can find the centroid of the brightest or darkest region in a computer controlled window and returns the X and Y coordinates of its centroid.3. NEURO-FUZZY TECHNOLOGYNeural networks and fuzzy systems (or neuro-fuzzy systems), in various forms, have been of much interest recently, particularly for the control of nonlinear processes.A neural net can incorporate fuzziness in various ways:The inputs can be fuzzy. Any garden-variety backprop net is fuzzy in this sense, and it seems rather silly to call a net "fuzzy" solely on this basis, although Fuzzy ART(Carpenter and Grossberg 1996) has no other fuzzy characteristics.The outputs can be fuzzy. Again, any garden-variety backprop net is fuzzy in this sense. But competitive learning nets ordinarily produce crisp outputs, so forcompetitive learning methods, having fuzzy output is a meaningful distinction. For example, fuzzy c-means clustering (Bezdek 1981) is meaningfully different from (crisp) k-means. Fuzzy ART does not have fuzzy outputs.The net can be interpretable as an adaptive fuzzy system. For example, Gaussian RBF nets and B-spline regression models (Dierckx 1995, van Rijckevorsal 1988) are fuzzysystems with adaptive weights (Brown and Harris 1994) and can legitimately be called Neuro-fuzzy systems.The net can be a conventional NN architecture that operates on fuzzy numbers instead of real numbers (Lippe, Feuring and Mischke 1995).Fuzzy constraints can provide external knowledge (Lampinen and Selonen 1996). l rV lV r V t X c S3.1. Fuzzy Set Definition for the Navigation SystemBy defining the steer angel of the mobile robot is from –30 degree to 30 degree. The fuzzy sets could be defined as follows:(a) The robot current angle with respected to the line direction: (Input Variable: AG)Fuzzy setAG_2AG_1AG AG1AG2DescriptionLefter Left Middle Right Righter Variation Range -30~-10-20~0-10~100~2010~30(b) The robot offset with respect to the centerline: (Input Variable: OS) Suppose the road has a width of 3 meters, and we study the right-camera tracking system. So, the vehicle should keep its center from the right line for a distance of 1.5 meter.Fuzzy setOS_2OS_1OS OS1OS2DescriptionLefter Left Middle Right Righter Variation Range2.2~3 1.5~3 1.4~1.60~1.50~0.83.2. Input Membership3.3. A Neuro-fuzzy Hybrid SystemNeuro-fuzzy systems combine the advantages of fuzzy systems, which deal with explicit knowledge which can be explained and understood, and neural networks which deal with implicit knowledge which can be acquired by learning. Neural network learning provides a good way to adjust the expert’s knowledge and automatically generate additional fuzzy rules and membership functions, to meet certain specifications and reduce design tie and costs. On the other hand, fuzzy logic enhances the generalization capability of a neural -30-20-10010203000.20.40.60.81Robot Angel : AGD e g r e e o f m e m b e r s h i p lefter left middle right righter 00.51 1.52 2.5300.20.40.60.81Robot Offset: OS D e g r e e o f m e m b e r s h i p righte r right middle left lefternetwork system by providing more reliable output when extrapolation is needed beyond the limits of the training data.3.4. The Neuro-fuzzy ArchitectureThe Neuro-fuzzy system consists of the various components of a traditional fuzzy system, except that each stage is performed by a layer of hidden neurons, and neural network learning capability is provided to enhance the system knowledge.Figure 4. The schematic of a Neuro-fuzzy System architecture3.5. The implementation of Fuzzy RulesFigure 5. shows a simple case of Neuro-fuzzy system for mobile robot navigation. A set of navigation rules is employed in the system.For the Right Camera Line Tracking:Rule 1: IF Offset is RIGHT and Angle is POSITIVE THEN the Steer_Angle is ZERO Rule 2: IF Offset is RIGHT and Angle is ZERO THEN the Steer_Angle is LEFTRule 3: IF Offset is RIGHT and Angle is NEGATIVE THEN the Steer_Angle is LEFT Rule 4: IF Offset is CENTER and Angle is POSITIVE THEN the Steer_Angle is RIGHT Rule 5: IF Offset is CENTER and Angle is ZERO THEN the Steer_Angle is ZERORule 6: IF Offset is CENTER and Angle is NEGATIVE THEN the Steer_Angle is LEFT Rule 7: IF Offset is LEFT and Angle is POSITIVE THEN the Steer_Angle is RIGHT Rule 8: IF Offset is LEFT and Angle is ZERO THEN the Steer_Angle is RIGHTRule 9: IF Offset is LEFT and Angle is NEGATIVE THEN the Steer_Angle is ZERO The value at the end of each rule represents the initial weight of the rule, and will be adjusted to its appropriate level at the end of training. All the rules lead to three different subjects, which is the steer direction for the mobile robot. Then three output nodes are needed. They are TURN RIGHT, GO STRAIGHT and TURN LEFT correspondingly.Input Data FuzzificationLayer Fuzzy Rule Layer Defuzzification Layer Output DataFigure 5. Neuro-fuzzy Architecture3.6. Training for Neuro-fuzzy SystemThe weight for each neural node is configured with an initial value specified by system experts, and then further tuned by using a training algorithm. A backpropagation algorithm is employed in this research as follows:Step 1: Present an input data sample, compute the corresponding outputStep 2: Compute the error between the output(s) and the actual target(s)Step 3: The connection weights and membership functions are adjustedStep 4: At a fixed number of epochs, delete useless rule and membership function nodes,and add in new onesStep 5: IF Error > Tolerance THEN goto Step 1 ELSE stop.When the error level drops to below the user-specified tolerance, the final interconnection weights reflect the changes in the initial fuzzy rules and membership functions. If the resulting weight of a rule is close to zero, the rule can be safely removed from the rule base, since it is insignificant compared to others. Also, the shape and position of the membership functions in the Fuzzification and Defuzzification Layers can be fine tuned by adjusting the parameters of the neurons in these layers, during the training process.Input If X is A Grade Weights Rules Weightsof Rules Then Y is B Weights Output Offset RightCenterLeftAngel PositiveZeroNegative 0.50-0.501515Rule 1Rule 91.01.0 1.01.0Right Zero Left 0.60.5Turn Right Go straight Turn Left ..Rule 24. CONCLUSION AND FURTHER WORKThe neuro-fuzzy system offers the precision and learning capability of neural networks, and yet are easy to understand like fuzzy system. Explicit knowledge acquired from experts can be easily incorporated into the navigation system, and implicit knowledge can be learned from training samples to enhance the accuracy of the output. A basic case is studied in this paper. Furthermore, the modified and new rules can be extracted from a properly trained neuro-fuzzy system, to explain how the results are derived. Some new technologies can be developed on the Bearcat II test bed to improve the learning speed, adjust learning and momentum rates, etc.ACKNOWLEDGEMENTSThis work has been a continual learning experience and could not have been completed without the devoted work and contributions of the previous team members especially: Tayib Samu, KalyanChakravarthi Kolli, Krishnamohan Kola and Wen-chuan Chiang. The authors would like to thank the following staff personnel for their technical assistance: Ming Cao, Karthikeyan Kumaraguru, Sameer Parasnis, Nathan Mundhenk, Sampath Kanakaraju, Satish Shanmugasundaram, Thyagarajan Ramesh and Yan Mu. The vehicle has been sponsored in part by several generous contributions and we thank our current and past sponsors: GE, Futaba, SME Chapter 21, American Showa, Planet Products Corp., SO&A of UC, R.O.V. Technologies, and others.REFERENCES[1] Alessandro Saffiotti, “Autonomous Robot Navigation”, Handbook of Fuzzy Computation, E. Ruspini, P. Bonissone and W. Pedrycz, Eds., Oxford University Press, 1998.[2] M. Delgado, A. Gomez Skarmeta, H. Martinez Barbera, P. Garcia Lopez, "Fuzzy Range Sensor Filtering for Reactive Autonomous Robots", 5th International Conference on Soft Computing (IIZUKA'98), Iizuka, JAPAN, Oct 1998.[3] D. Kontoravdis, A Likas, K. Blekas and A. Stafylopatis, “A Fuzzy Neural Network Approach to Autonomous Vehicle Navigation”, Proc. EURISCON `94, Malaga, Spain, Aug. 1994.[4] Karthikeyan Kumaraguru et al, “Design of a Mobile Robot Kit: Bearcat II”, The 1999 UC Robot Team, Center for Robotics Research, University of Cincinnati, Cincinnati, OH, 1999.[5] NIBS Pte Ltd Technical Report TR-960308, NIBS Inc., “NeuroFuzzy Computing”, NewWave Intelligent Business Systems, .sg/~midaz/.[6] Ming Cao and Ernest Hall, “Fuzzy Logic Control for an Automated Guided Vehicle”, SPIE international conference, November, Boston, 1998.[7] Jin Cao and Ernest Hall, "Sensor Fusion for the Navigation of Autonomous Guided Vehicle Using Neural Networks", SPIE international conference, November, Boston, 1998.[8] Jin Cao, Wen-chuan Chiang, T. Nathan Mundhenka and Ernest L. Hall, "Path Planning for Mobile Robot Navigation Using Sonar Map and Neural Network", SPIE international conference, November, Boston, 1998.[9] Scott Pawlikowski, “Development of a Fuzzy Logic Speed and Steering Control System”, Thesis of University of Cincinnati, Cincinnati, OH, 1999.[10] General Electric, EV-1 SCR Control Manual, Charlottesville, Virginia 1986.[11] Galil Inc, DMC-1000 Technical Reference Guide Ver 1.1, Sunnyvale, California 1993.[12] Reliance Electric, Electro-Craft BDC-12 Instruction Manual, Eden Prairie, Minnesota 1993.。
null

Automotive Innovation国际期刊免费阅读Automotive Innovation是中国汽车工程学会与Springer合作的一本全球发行的英文期刊,反映了汽车工程领域新的研究成果和技术进展。
主要刊登关于汽车研究理论、方法和前沿科技等方面的学术论文,旨在打造面向全球汽车及其相关行业的工程技术人员和科研人员的国际学术交流平台。
在国内外业界的广大支持和认可下,目前已顺利出版5期,2019年第1期文章如下,其中斜体的中文题目为编辑译文,仅供参考。
节能与新能源汽车[1]Alvaro C.Michelotti,Jonny C.da Silva,Lauro C.Nicolazzi:Novel Mechanical Interface Design for Automotive Starting Systems.Automotive Innovation2(1),14-25(2019).(新型汽车启动系统机械接口设计)[2]Liu,J.,Li,J.,Wang,Y.,et al.:Technology Development Analysis on Low Carbon for Power of Heavy-Duty Commercial Vehi-cle.Automotive Innovation2(1),64-70(2019).(重型商用车动力低碳技术发展分析)[3]Shen,Q.,Li,X.,Zhao,Y.,et al.:Experimental and Performance Analyses on Elastomer-Strengthened Polyethylene Tereph-thalate/Glass Fiber Blends.Automotive Innovation2(1),71-78(2019).(弹性体增强聚对苯二甲酸乙二醇酯/玻璃纤维复合材料的实验与性能研究)汽车安全技术[4]Ma,F.,Zhao Y.,Wang,G.,et al.:Crashworthiness Optimization Design of Thin-Walled Tube Filled withRe-entrant Triangles Honeycombs.Automotive Innovation2(1),1-13(2019).(内凹三角形蜂窝结构的薄壁管碰撞优化设计)汽车产业系统工程[5]Yang,W.,Chen,J.,Liu,Z.,et al:Vibration Characteristics of Framed SUV Cab Based on Coupled Transfer Path Analysis.Automotive Innovation2(1),26-34(2019).(基于耦合传递路径分析的非承载SUV驾驶室振动特性研究)[6]Zhu,M.,Yao,P.,Pu,Y.,et al.:Comparative Study on the TemperatureRise of a Dry Dual Clutch Under Different Starting Conditions.Automotive Innovation2(1),35-44(2019).(不同启动工况下干式双离合器温升的比较研究)[7]Gong,H.:Estimation ofResidual Exhaust Gas of Homogeneous Charge Compression Ignition Gasoline Engine Operating Under Negative Valve Overlap Strategy.Automotive Innovation2(1),45-54(2019).(负气门重叠角策略条件下的均质充量压缩点火汽油机残余废气数值估算)[8]Li,X.,Lyu,J.,Hong,J.,et al.:MPC-Based Downshift Control of Automated Manual Transmissions.Automotive Innovation2(1),55-63(2019).(基于模型预测控制的AMT降挡控制)期刊所有文章在2019年均可免费阅读,在线阅读及投稿,详见如下网址:http://www.Chinasaejournal.com.cn联系方式:86-10-50950101;jai-editor@sae-china.org。
驾驶机器人车辆多新息动态转向力矩补偿

Vol.54 No.7Jul.2020第54卷第7期2020年7月西安交通大学学报JOURNAL OF XI'AN JIAOTONG UNIVERSITY驾驶机器人车辆多新息动态转向力矩补偿顾爱博,陈刚(南京理工大学机械工程学院,210094,南京%摘要:为了减小驾驶机器人车辆长期自动驾驶过程中转向性能下降带来的影响,提出了一种基于多新息的驾驶机器人车辆动态转向力矩补偿方法。
构建了车辆动力学模型和驾驶机器人车辆动力 学模型;建立了以路径曲率及车速为输入、方向盘转向角为输出的驾驶机器人车辆转向性能离线自学习模型;建立了以方向盘角速度、角加速度及车轮转角为输入,转向机械手驱动力矩为输出的受 控自回归在线辨识模型,并运用遗忘因子多新息最小二乘方法进行参数辨识,将迭代计算过程中的标量新息扩展为向量新息,提高了驾驶机器人车辆转向性能参数的辨识精度;驾驶机器人车辆自动 驾驶过程中,利用离线自学习模型和转向机械手动力学方程计算出转向电机输出力矩,加上反馈回来的驱动力矩误差,实现对驾驶机器人车辆转向力矩的在线动态补偿。
仿真与试验结果对比表明:所提方法辨识的转向力矩误差在0. 1 N • m 以内,跟踪目标路径的横向位移偏差小于0. 2 m ;所提方法有效减小了驾驶机器人车辆转向性能下降造成的影响$关键词:驾驶机器人车辆;动态转向力矩补偿;多新息;转向性能;离线自学习 中图分类号:U461. 1文献标志码:ADOI : 10. 7652/xjtuxb202007006 文章编号:0253-987X(2020)07-0043-09OSID 码Multi-Innovation Based Dynamic Steering Torque Compensation forDriving Robot VehicleGU Aibo , CHEN Gang(Schoolof MechanicalEngineering ,Nanjing UniversityofScienceandTechnology ,Nanjing21%%94,China %Abstract : Toweakentheimpactofsteeringperformancedegradationduringlong-termautomaticdriving , a dynamic steering torque compensation method for driving robot vehicle based on multi innovation is proposed.The vehicle dynamic model and driving robot vehicle dynamic model areconstructed , then an o f -line self-learning model for the steering performance of driving robot vehicleisestablished , which takes the path curvature and the vehicle speed as input and the steeringwheelangleasoutput.Andacontro l edautoregressiveon-lineidentification modelisestablished , whichtakestheangularvelocityofsteering wheel , angularaccelerationand wheel angleasinputandthedrivingtorqueofsteering manipulatorasoutput , andtheparametersare identifiedwiththeforge t ingfactormulti-innovationleastsquaremethod ,thescalarinnovationis extendedtovectorinnovationintheiterativecalculationtoimprovetheidentificationaccuracyofsteeringperformanceparametersofdrivingrobotvehicle.Intheautomaticdriving processofdrivingrobotvehicle ,theo f -lineself-learning modelandsteering manipulatordynamicequation收稿日期:2020-01-10o 作者简介:顾爱博(1995—%男,硕士生;陈刚(通信作者),男,副教授。
汽车辅助驾驶系统设计研究
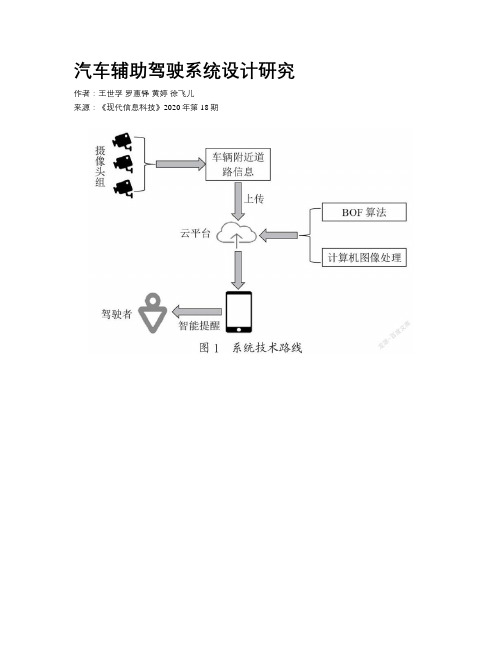
汽车辅助驾驶系统设计研究作者:王世孚罗惠铎黄婷徐飞儿来源:《现代信息科技》2020年第18期摘要:基于汽車辅助驾驶技术,文章旨在设计出一款能在一定程度上辅助驾驶者“观察”道路情况以及道路发生险情时及时预警的车载汽车辅助驾驶系统。
系统采用OpenCV、YOLOv3算法以及语义分割模型,依赖开源学习库、程序库通过YOLOv3算法监测模型和语义分割算法完成车道线检测以及人物、车辆等障碍物的检测与识别,通过识别内容作为判断路况依据并做出相应的提示,达到辅助驾驶的目的。
关键词:汽车辅助驾驶;目标检测;YOLOv3;语义分割;车道线检测中图分类号:TP391.41;U463.6 文献标识码:A 文章编号:2096-4706(2020)18-0013-04Abstract:Based on the vehicle assisted driving technology,this paper aims to design an on-board vehicle auxiliary driving system which can help the driver to “observe” the road situation and give early warning when the road is in danger. The system uses OpenCV,YOLOv3 algorithm and semantic segmentation model,relies on open source learning library and program library,completes lane line detection and identification of people,vehicles and other obstacles through the monitoring model and semantic segmentation algorithm of YOLOv3 algorithm. The recognition content is used as the basis for judging road conditions and making corresponding prompts to achieve the purpose of assisting driving.Keywords:automobile assisted driving;target detection;YOLOv3;semantic segmentation;lane line detection0 引言汽车辅助驾驶系统旨在结合传感器技术、视觉识别技术、定位导航技术等多种先进的科学技术,构建一个庞大的汽车驾驶应用,设计出一款能够辅助驾驶者避免发生交通事故的车载汽车辅助驾驶系统。
关于智能辅助驾驶的英语作文

关于智能辅助驾驶的英语作文Autonomous Driving: The Future of TransportationThe rapid advancements in technology have revolutionized the way we approach transportation. One of the most significant developments in this field is the emergence of autonomous driving, also known as self-driving or driverless vehicles. This innovative technology has the potential to transform the way we commute, making our journeys safer, more efficient, and more accessible.At the core of autonomous driving is the integration of various cutting-edge technologies, including sensors, cameras, GPS, and advanced algorithms. These systems work together to perceive the surrounding environment, analyze real-time data, and make decisions on the vehicle's movements, all without the need for human intervention. This level of automation not only enhances the driving experience but also addresses some of the most pressing challenges faced by traditional modes of transportation.One of the primary benefits of autonomous driving is its potential to improve road safety. Human error is a leading cause of accidents, and self-driving vehicles are designed to eliminate these errors byproviding a more consistent and reliable driving experience. Equipped with a multitude of sensors and advanced decision-making algorithms, autonomous cars can detect potential hazards, anticipate traffic patterns, and react more quickly than human drivers. This increased situational awareness and rapid response time can significantly reduce the risk of collisions, ultimately saving lives and reducing the burden on emergency services.Moreover, autonomous driving has the potential to enhance the mobility of individuals who may have difficulty operating a traditional vehicle, such as the elderly or those with physical disabilities. By providing a more accessible and inclusive transportation option, self-driving cars can empower these individuals to regain their independence and participate more actively in their communities. This not only improves their quality of life but also promotes social inclusion and equality.Another compelling aspect of autonomous driving is its potential to improve the efficiency of transportation networks. Self-driving vehicles can be programmed to optimize their routes, reduce congestion, and minimize fuel consumption. By communicating with each other and with infrastructure, these cars can coordinate their movements, creating a more seamless flow of traffic and reducing the overall time spent commuting. This increased efficiency can lead to significant cost savings for both individuals and businesses, as wellas a reduction in environmental impact through lower emissions and fuel usage.However, the integration of autonomous driving technology is not without its challenges. One of the primary concerns is the issue of liability and accountability in the event of an accident. As the decision-making process shifts from human drivers to complex algorithms, there are questions about who bears responsibility when something goes wrong. Policymakers and regulatory bodies will need to address these legal and ethical considerations to ensure the safe and responsible deployment of autonomous vehicles.Additionally, the public's acceptance and trust in this new technology will be crucial for its widespread adoption. Concerns about cybersecurity, privacy, and the potential for job displacement (e.g., for professional drivers) will need to be addressed through comprehensive public education and engagement efforts. Addressing these concerns will be essential in building a future where autonomous driving is seamlessly integrated into our transportation systems.Despite these challenges, the potential benefits of autonomous driving are undeniable. As the technology continues to evolve and improve, we can expect to see a gradual but steady integration of self-driving vehicles into our daily lives. From improved road safetyand increased mobility to greater efficiency and environmental sustainability, autonomous driving holds the promise of transforming the way we move and experience transportation.As we look to the future, it is clear that autonomous driving will play a pivotal role in shaping the transportation landscape of tomorrow. By embracing this innovative technology and addressing the associated challenges, we can unlock a future of safer, more accessible, and more sustainable mobility for all.。
基于“工程教育认证”标准的《汽车理论》教学体系构建

学术|职业教育ACADEMIC基于“工程教育认证”标准的《汽车理论》教学体系构建Construction of Automobile Theory Teaching System Basedon Engineering Education Certification Standard(1.重庆理工大学车辆工程学院,重庆 400054;2.重庆电讯职业学院,重庆 402274)(1.School of Vehicle Engineering, Chongqing University of Technology,Chongqing 400054, China;2.Chongqing Telecommunications Vocational College, Chongqin 402274, China)熊锋1、刘赟2、邹喜红1、张志刚1、郭栋1、陈莹莹1Xiong Feng 1、Liu Yun 2、Zou Xihong 1、Zhang Zhigang 1、Guo Dong 1、Chen Yingying 1摘要:本文立足重庆理工大学车辆工程专业工程教育认证建设实践,以专业核心必修课程《汽车理论》为对象,参照工程教育认证标准,融合成果导向教育(OBE)与持续改进理念,构建其基于“工程教育认证”标准的教学体系,包括拟定教学目标、设计教学内容、选择教学方式和制定教学评价等。
希望本文为本专业其他课程构建面向工程教育认证的教学体系提供很好示范,也为其他高校车辆工程专业工程教育认证建设提供有益借鉴。
关键词:汽车理论;工程教育认证;成果导向OBE ;持续改进;教学体系中图分类号:G642.0 文献标识码:AAbsrtact :This paper constructs a teaching system based on“Engineering Education Certification”standard.That based on the construction practice of engineering education certification of the vehicle engineering major in Chongqing University of technology,and taking the core compulsory course“automobile theory”as the object, and referring to the Engineering Education Certification standard. It includes the formulation of teaching objectives,the design of teaching content,the selection of teaching methods and the formulation of teaching evaluation.Keywords :automobile theory; engineering education certification; OBE; continuous improvement; teaching system0 引言为主动应对新一轮科技革命与汽车产业变革、支撑“中国制造2025”等一系列国家战略,加快推进高等院校车辆工程专业“工程教育认证”建设刻不容缓。
汽车理论英文课件

an overview of vehicle sensors and their applications, including tire pressure sensors, airbag sensors, and crash sensors
Transmission control
the function and operation of transmission control systems, including automatic transmission, dual clutch transmission, and continuously variable transmission
Engine, transmission, suspension, steering, braking system, cooling system, exhaust system, etc
Classification of Automotive T
Passenger cars
including sedans, SUVs, station wagons, etc
要点二
Importance of vehicle dynamics
Understanding vehicle dynamics is critical in optimizing vehicle performance, safety, and control
要点三
Applications of vehicle dynamics
Valve and valve spring
Introduce the structure, working principle, and function of valve springs.
Design of Tracked Vehicle Based on Jumping Sumo

Design of Tracked Vehicle Based on Jumping Sumo 陈莹【期刊名称】《科学中国人》【年(卷),期】2017(000)03Z【摘要】The article aims to design a program that can contro the jumping sumo to complete basic instructions like moving and turning and to perform certain tasks automatically.Knowledge abou image analysis, edge detection and IOS development have been applied to the project.With image analysis and edge detection algorithm, the jumping sumo is expected to successfully perform the basic actions and automatically move along the track.In the future design the jumping sumo has more potential to be used in the civil domain.【总页数】1页(P25-25)【作者】陈莹【作者单位】扬州大学【正文语种】中文【中图分类】TP391.41【相关文献】1.Robust tracking control design for a flexible air-breathing hypersonic vehicle [J], 张垚;鲜斌;刁琛;赵勃;郭建川2.Optimization Design of Double-parameter Shift Schedule of Tracked Vehicle with Hydrodynamic-mechanical Transmission [J], 武景燕;魏巍;曲婧瑶;闫清东3.Robust tracking control design for a flexible air-breathing hypersonic vehicle [J], 张垚;鲜斌;刁琛;赵勃;郭建川;;;;;;;;;;;;;;;;;;;;;4.Structural Analysis and Improved Design of the Gearbox Casing of a Certain Type of Tracked Vehicle [J], ZHANG Xue-sheng; JIA Xiao-ping; CHEN Ya-ning; YU Kui-long5.Pulse-Width Pulse-Frequency Based Optimal Controller Design for Kinetic Kill Vehicle Attitude Tracking Control [J], Xingyuan Xu;Yuanli Cai因版权原因,仅展示原文概要,查看原文内容请购买。
如果汽车可以在天空中飞行英语作文

如果汽车可以在天空中飞行英语作文全文共3篇示例,供读者参考篇1If Cars Could Fly in the SkyHave you ever been stuck in traffic, tapping your fingers impatiently on the steering wheel as the cars inch along at a snail's pace? Or maybe you've missed an important event or been late for work because of unexpected road closures or accidents tying up the highways. Wouldn't it be incredible if our cars could simply sprout wings and take to the skies, soaring above the gridlock?While it may sound like a fantasy straight out of a science fiction movie, the concept of flying cars is not as far-fetched as one might think. In fact, companies and inventors around the world have been working tirelessly to turn this dream into a reality. And can you imagine the incredible possibilities if automobiles could truly take flight?To begin with, air travel would become exponentially more efficient and convenient. Rather than having to navigate through crowded airports, wait in endless security lines, and adhere tostrict schedules, we could simply hop into our personal vehicles and embark on our airborne journeys whenever we wished. No more stressing about missed connections or delayed flights – the friendly skies would be our personal highways, allowing us to travel directly to our intended destinations without the hassles of traditional air travel.Traffic congestion, a constant source of frustration for commuters worldwide, would become a thing of the past. With the entire airspace available for travel, bottlenecks and gridlock on the roads would be rendered obsolete. We could soar above the tangled web of highways, bypassing accidents and construction zones that typically bring surface travel to a standstill. Imagine the time and frustration this would save, not to mention the positive environmental impact of reducing emissions from idling vehicles.For those of us who live in remote or rural areas, access to essential services and amenities would be vastly improved. No longer would we need to endure grueling drives to reach hospitals, schools, or shopping centers. A short flight would transport us to our desired locations in a fraction of the time, making even the most isolated communities feel connected to the world around them.Of course, the prospect of flying cars also raises legitimate concerns about safety and regulation. Rigorous training programs and licensing procedures would need to be implemented to ensure that all aerial drivers possess the necessary skills and knowledge to navigate the skies responsibly. Air traffic control systems would require significant upgrades to accommodate the influx of personal aircraft, and strict rules and guidelines would need to be established to maintain order and prevent midair collisions.Additionally, the environmental impact of widespread aerial travel would need to be carefully evaluated and mitigated. While reducing emissions from ground transportation, the increased use of airborne vehicles could potentially contribute to other forms of pollution or disruptions to wildlife habitats. Developing clean, sustainable propulsion systems and implementingeco-friendly practices would be paramount to minimizing the ecological footprint of flying cars.Despite these challenges, the potential benefits of airborne automotive travel are too tantalizing to ignore. Imagine the possibilities for emergency response vehicles, able to rapidly traverse any terrain or bypass obstacles to reach those in need. Or envision the enhanced mobility for individuals with disabilitiesor limited access to traditional transportation options. The applications are virtually limitless.Of course, the transition to a world of flying cars would not happen overnight. It would require a massive collaborative effort from governments, manufacturers, urban planners, and countless other stakeholders. Infrastructure would need to be redesigned, regulations established, and public education campaigns launched to prepare society for this revolutionary mode of transportation.But if we dare to dream big and embrace innovation, the skies could truly become the new roads of the future. A world where personal aerial travel is commonplace, where traffic jams are a distant memory, and where the barriers of distance and geography are rendered insignificant – this is the incredible potential that flying cars could unlock.So the next time you find yourself stuck in gridlock, glance skyward and imagine a future where the open air is your unrestricted highway. A future where time and convenience are prioritized, and the boundaries of human mobility are pushed to new heights. It may sound like a fantasy today, but with determination and vision, the era of flying cars could be just over the horizon.篇2If Cars Could Fly in the SkyCan you imagine a world where cars can soar through the clouds instead of being stuck in traffic on the highways? A world of flying automobiles might seem like a far-fetched concept from a science fiction movie, but let me take you on a imaginary journey where this dream becomes a reality. As a student fascinated by the possibilities of future technologies, I can't help but wonder how our lives would transform if we could commute by air instead of being confined to the roads.To begin with, let's envision the sheer convenience and time-saving potential of flying cars. No more being trapped in gridlocked freeways or dealing with road closures and detours. With the vast expanse of the sky as our roadway, we could chart direct routes to our destinations, cutting travel times significantly. Imagine being able to soar above the congestion, leaving the chaos of rush hour traffic far below. A trip that typically takes hours could be reduced to a mere fraction of the time, revolutionizing our daily commutes and long-distance travels alike.But the benefits of flying cars extend far beyond just saving time. Consider the environmental impact of such a mode of transportation. With the ability to navigate through the air, we could significantly reduce the need for extensive road networks and the associated infrastructure. This would free up vast swaths of land that could be reclaimed by nature, allowing ecosystems to thrive and biodiversity to flourish. Furthermore, with the potential for electric or alternative fuel propulsion systems, flying cars could dramatically reduce our reliance on fossil fuels, curbing greenhouse gas emissions and mitigating the effects of climate change.Of course, the prospect of flying cars also raises concerns about safety and regulation. How would we ensure that the skies remain orderly and free from mid-air collisions? Would there be designated flight paths and air traffic control systems? And what about the potential for accidents or mechanical failures? These are valid concerns that would need to be addressed through rigorous safety protocols, advanced collision avoidance technologies, and stringent licensing and training requirements for pilots – or should I say, drivers?Imagine the thrill of soaring through the clouds on your daily commute or embarking on a cross-country adventure inyour personal flying vehicle. The scenery would be breathtaking, with vast landscapes and cityscapes unfolding beneath you. Perhaps we could even design flying cars with panoramic windows or convertible roofs to fully appreciate the beauty of the open skies.Of course, the introduction of flying cars would also necessitate a rethinking of urban planning and infrastructure. Our cities would need to adapt, with designated take-off and landing zones, as well as dedicated service stations and repair facilities for these aerial vehicles. Residential and commercial areas might feature rooftop landing pads or vertical hangars, seamlessly integrating the airborne transportation network into our built environments.But the implications of flying cars go beyond just transportation and urban design. Imagine the possibilities for emergency services and disaster relief efforts. First responders could rapidly navigate through the air, bypassing ground obstacles and reaching those in need with unprecedented speed. Search and rescue operations could cover vast areas with ease, and aid could be delivered to remote or hard-to-reach regions without the constraints of traditional ground transportation.Furthermore, the aviation industry itself might undergo a paradigm shift. With personal flying vehicles becoming mainstream, the demand for traditional commercial airlines could potentially decrease, leading to a reimagining of air travel as we know it. Perhaps we could see a rise in innovative aerial transportation services, offering shared or on-demand flying car services for those who don't wish to own their own vehicle.Of course, the realization of flying cars is not without its challenges. Developing the necessary technologies, ensuring safety and reliability, and overcoming regulatory hurdles would be monumental tasks. But as a student,I can't help but be captivated by the boundless potential of such an ambitious endeavor. The prospect of soaring through the skies in our personal vehicles ignites a sense of wonder and excitement within me.Imagine the freedom and exhilaration of piloting your own flying car, leaving the constraints of the ground behind. The possibilities for exploration, adventure, and newfound perspectives would be endless. We could soar above breathtaking landscapes, witness sunrises and sunsets from a whole new vantage point, and even embark on aerial road trips to destinations previously inaccessible by conventional means.While the road ahead may be filled with challenges and obstacles, I firmly believe that human ingenuity and determination can overcome any hurdle. If we can dream it, we can achieve it. The concept of flying cars may seem like a fantasy today, but who knows what wonders the future might hold?As a student, I am filled with a sense of optimism and excitement about the potential of this technology. I eagerly await the day when I can climb into my own flying car, punch in my destination, and take to the skies, leaving the world of traffic jams and gridlock far behind. Until then, I will continue to dream, imagine, and embrace the boundless possibilities that the future has in store.篇3If Cars Could Fly in the SkyHave you ever been stuck in terrible traffic, tapping your fingers impatiently on the steering wheel as you inch along at a snail's pace? Or maybe you've missed an important event or appointment because of unexpected road congestion and delays. If cars could fly, these frustrating situations could become a thing of the past. Imagine soaring over gridlocked highways and getting to your destination quickly and efficiently. While it maysound like a far-fetched dream, the concept of flying cars is not as outlandish as it may seem. In fact, with rapid advancements in technology, they could very well become a reality in thenot-too-distant future.The idea of flying cars has captured the imagination of inventors, engineers, and science fiction writers for decades. As early as the 1940s, visionaries like Theodore Gordon envisioned a future where personal aerial vehicles would be as commonplace as automobiles on the ground. Despite numerous attempts and prototypes over the years, however, a commercially viable and mass-produced flying car has remained elusive – until now.Several companies around the world are currently developing and testing various models of flying cars, also known as roadable aircraft or dual-mode vehicles. These innovative machines combine the functionality of a traditional car with the ability to sprout wings or rotors and take to the skies. Some are designed to drive on roads and then transition to flight mode by unfolding wings or propellers, while others are essentially small airplanes with the capability of driving on roads after landing.One of the leading contenders in the race to bring flying cars to market is Terrafugia, a US-based company that has been working on their "Transition" model since 2006. The Transition isa two-seater vehicle that can transform from a car to an airplane in under a minute. It has fold-out wings, a propeller at the rear, and is designed to be able to drive on roads as well as take off and land at local airports or private airstrips.Another company making waves in the flying car industry is Slovakian firm AeroMobil. Their latest prototype, the AeroMobil 4.0, is a sleek, futuristic-looking vehicle that can drive on roads like a regular car and then unfold its wings to take off from an airstrip or runway. The AeroMobil is expected to have a top air speed of around 160 mph and a range of over 460 miles on a single tank of gas.While these and other flying car models are still in development and face significant regulatory hurdles, the potential benefits of such technology are numerous. Beyond eliminating traffic congestion and travel delays, flying cars could also reduce environmental pollution by alleviating the need for as many ground vehicles and providing more efficient modes of transportation.Moreover, flying cars could open up vast new possibilities for personal travel and even transform the way cities and transportation infrastructure are designed. Instead of crowded highways and surface streets, cities of the future might havespecialized take-off and landing zones for flying cars, as well as strategically located "droneports" for aerial ride-sharing services.Of course, the widespread adoption of flying cars would also come with its own set of challenges and concerns. Safety would be a paramount issue, as the skies could become crowded with personal aerial vehicles piloted by drivers of varying skill levels. Rigorous training, licensing, and air traffic control systems would need to be implemented to prevent mid-air collisions and ensure the safety of both flyers and those on the ground.There are also questions about the environmental impact of having potentially millions of flying cars crisscrossing the skies. While they may produce fewer emissions than traditional gasoline-powered cars on the ground, the noise pollution and exhaust from a high volume of aerial vehicles could create new problems for urban areas.Additionally, the cost of purchasing and operating a flying car would likely make them unaffordable for the average consumer, at least initially. The Terrafugia Transition, for example, is expected to have a price tag of around 280,000 when it becomes available – putting it well out of reach for most budget-conscious buyers.Despite these challenges, the dream of owning a personal flying vehicle continues to captivate the public imagination. After all, who hasn't fantasized about by-passing traffic by simply taking to the air? While flying cars may still seem like the stuff of science fiction today, the rapid pace of technological innovation means they could become a practical, real-world solution to urban congestion in the years and decades to come.So the next time you find yourself mired inbumper-to-bumper traffic, just look up and imagine the open skies above, free of gridlock and delays. With flying cars on the horizon, that aggravating commute could one day be a relic of the past – replaced by an effortless and exhilarating soar above the clouds to your destination. The future of transportation is looking up, literally.。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
β ωy
For the convenient analysis and design of UUV autopilot, we usually do the following simplification and suppose to the dynamic model of projects: the neglect of the influence of negative buoyancy; the suppose of symmetry of external form to vertical plane xoy and horizontal plane xoz ; the suppose of propeller thrust along the vertical axis; the suppose of hydrodynamic parameter meet linear assume; the amount of inertia product J xy , J yx , J xz , J zx , J yz , J zy is small and can be neglected; The attack angle α and the sideslip angle β are small; the weight, moment of inertia and velocity shall all be seemed to be constants. On the basis above, we can figure out the mathematics model of UUV three channels as follows [7]: The roll channel: & 0 1 ϕ ω ωx & x = 0 kω x & δ d 0 0 0 ϕ 0 δd kω ωx + 0 δ dc . x δ 1 τ − 1 τ δd d δd
Design of autopilot for BTT UUV based on H∞ Control theory
ZHANG Yi-chao and ZHOU Xu-chang
Department of Weaponry Engineering Naval University of Engineering Wuhan, China e-mail: 57542702@
0
ωω
δe α e e ′α ′δ ′δ kα kn − kα kn − kn τ δe n y y y y δe α δe α ′y k n ′y kωz − kωz kn ω z δ −1 τ δ e e
It can assure that Fl ( P , K ) ∞ < γ , positive definite matrix P meets the following algebraic Riccati inequality: AT P + PA + C T C + P ( B1 B1T γ 2 −
Abstract—A novel robust control scheme using H∞ theory is proposed for three-channel coupling bank-to-turn (BTT) unmanned underwater vehicles (UUV) autopilot. Considering the coupling among the pitch, the yaw and the roll channels as bounded uncertain disturbance, as a result there is no coupling in the UUV model in the form of H∞ standard state function, and the pitch, the yaw and the roll channels are designed independently. The six-DOF simulation results show that the proposed design method is simple and feasible, and the designed autopilot is efficient for the BTT UUV, because it can restrain the disturbances effectively. Keywords- UUV; BTT ; H∞ control
T B2 ( D T D) B2 )P < 0
′α kα x y kn k ′δ e τ y ω β ny δe x ωω kωzx y + 0 δ ec ω xω y 0 1 τ δe
(7)
(2)
Since ε is a positive constant, the following equality is obviously true: AT P + PA + C T C + P ( B1 B1T γ 2 −
δe α ωz ωx
δd
I. INTRODUCTION It has long been understood that bank-to-turn (BTT) controlled missiles offer increased maneuverability over conventional roll stabilized, skid-to-turn (STT) controlled missiles[1,2]. However, it has not yet been given enough focus in the BTT controlled unmanned underwater vehicles (UUV) and the indifference delayed the development of BTT UUV control system[3-5]. Upon receiving a guidance command, fast response is achieved by a combined roll-pitch maneuver with the roll control system rapidly rotating the missile’s maximum lifting orientation into the desired maneuver direction and the pitch control system simultaneously developing the required magnitude of acceleration in the maximum lift orientation. Yaw control system also reduces lateral accelerations to satisfy the small sideslip constraints, so that the induced moment is minor and the stability and maneuverability is excellent[6,7]. To execute such BTT autopilot strategy, the UUV must have the capability to rapidly change the orientation of acceleration by a considerably large roll rate. However, the attendant high rolling rates produces some problems, and introduces unwanted, nonlinear, strong cross-coupling among the pitch-yaw-roll channels, this makes the UUV control system becomes a complex multi-variables plant. In this paper, a new robust approach based on H ∞ theory was applied to the control of a BTT autopilot system. The dynamic model of BTT UUV was taken from [7] and coupling factor was known as definite bounded disturbances.
T B2 ( D T D) B2 )P + ε I = 0
The yaw channel
β &z kβ n ω & β ′β y = k ω y k nz & δ r 0 ω xα kβ ′β kn ωxα z + kω y 0 δr β r ′zβ − kβ ′δ ′zδr τ δr n kβ kn kn − kn z z ω δr δr β β ω y ′ ′ kωyy kω − k k k nz ω y nz y 0 −1 τ δ r δr ωxωz r ′zβ ′δ kn τ δr kβ kn z ω α x ω x ωz kω y + 0 δ rc ωxωz 1 τ δr 0
(8)
′zβ kβ y kn
ω
(3)
The relative coefficients were taken from [7]. III. H∞ SUBOPTIMAL STATE FEEDBACK CONTROL LAW