WEDO2.0侦查机器人
wedo2.0搭建图14-仿生机器人-大象

20 1x 2x 4x 1x 2x
制作人:邢伟
Wedo2.0 #14-Elephont
2
3
1
3 1
4 2
62
制作人:邢伟
3x
2x 2x
1x 1x
4x 1x
6x
1x
1x 1x
2x
1x 4x
2x
2x
Wedo2.0 #14-Elephont
4x 2x
6x
2x
2x 4x
4x
1x
2x
4x
2x
2x
63
6x
49
Wedo2.0 #14-Elephont
1x 1x 1x 1x 1x 1x 1x 1x 1x 1x 1x 1x 1x
制作人:邢伟
50
Wedo2.0 #14-Elephont
1x 1x 1x 1x 1x 1x 1x 1x 1x 1x 2x 1x 2x
制作人:邢伟
51
1 2x 1x
制作人:邢伟
56
6 2x
制作人:邢伟
Wedo2.0 #14-Elephont
57
7 2x
制作人:邢伟
Wedo2.0 #14-Elephont
58
8 1x
制作人:邢伟
Wedo2.0 #14-Elephont
59
9 1x
制作人:邢伟
Wedo2.0 #14-Elephont
60
10 2x 1x
制作人:邢伟
Wedo2.0 #14-Elephont
35
1
1x
制作人:邢伟
Wedo2.0 #14-Elephont
36
2 1x
wedo2.0第四节侦察机器人

5
分享
5
分享
介绍一下你今天的作品吧! 运用了什么原理? 学会了什么? 与众不同的地方在哪里? 创意的部分在哪里?
THANK YOU FOR WATCHING
为获取敌方与军事斗争有关的情况而采取的行动。其主要 手段有观察、窃听、刺探、搜索、截获、捕获战俘、谍报 侦察、战斗侦察、照相侦察、雷达侦察、无线电侦听与测 向、调查询问、搜集文件资料等。
1 侦察机器人
侦察用通俗一点的话说就是眼观六路 耳听八方。 需要眼睛与耳朵的配合,然后通过大 脑思考分析得到的信息
今天我们需要完成的编程!
今天我们学习的是声音模块,1-28代表着不同 声音,而0是播放录制声音,之后会介绍!
3
编程
点击这里,可以录制声音
4
拓展
4
拓展
1、我们是否可以运用剩余的材料改造一下你的侦察机器人吗?
2、今天我们所学习的编程,你可以运用它,让它使你的侦察机器人发生不 一样变化吗?(比如侦察到后不同的声音,不同的灯光色彩)
复习
上节课回顾
复习
移动卫星 1、卫星的知识 2、搭建移动卫星 3、马达延时模块编程
第四节 侦察机器人
1
侦察机器人
1 侦察机器人
今天我们来学习wedo2.0的第四节 ——侦察机器人
1 侦察机器人
课前小讨论:
侦察这个词小朋友知道是什么意思吗? 侦察需要依靠我们的什么器官? 哪里会用到侦察?
1 侦察机器人
1 侦察机器人
搭建乐高模型
连接模型与设备
对电风扇进行编程, 使其工作
2
搭建
2
搭建
2
搭建
2
搭建
2
搭建
2
wedo2.0太空系列-8超级工具

入侵太空终端超级工具你发现的那个发出神秘信号的终端根本无法打开。
似乎你需要创造一个特殊的设备来与它互动。
一旦我们能进入控制系统,我们就能到达非地球复合体并探索它凯文,你能提供什么来连接终端?技术的发展导致了不断的发明和进步。
引入在设备之间传输数据的新方法。
如何连接这些设备?例如,网络上的电话,鼠标和电脑?通常使用无线(由于无线电波),电线(通过铜或铝)。
和光学连接(通过光纤)这是连接设备最古老的方法。
它可靠、便宜、简单,但并不总是方便。
铜常被用作做电线的材料。
你也可以与无线电波保持联系。
例如,移动电话、wi-fi和卫星电视就是这样工作的。
这种连接不需要电线铺设和维护在良好的条件下,但是,它不能工作没有高质量的天线。
这种类型的连接提供非常高的数据速率。
在大陆之间传输信息的是光缆。
因此,您可以轻松观看来自世界各地的用户上传的视频,没有任何延迟。
数据在每条光纤上传输。
光纤是一种内部光传播的细玻璃丝。
它被纤维壁反射,因此不能出来。
一端安装激光发射器,另一端安装接收探测器。
这种光纤可以远距离传输。
你认为怎样才能加入一个外星人终端并进入这个综合体?这个设备可以连接到一个外星人的终端,并通过运行病毒程序破解他们的安全密码。
机器人装有两个传感器,可以对倾斜做出反应,并对物体进行缩放。
倾斜传感器将用于控制方向的运动。
病毒。
运动传感器可以用来改变控制灵敏度。
倾斜传感器固定在一个角度,这样当机器人方便。
保持,传感器水平放置。
确保传感器在执行任务时位置正确。
添加外部面板,便于使用。
wedo2.0太空系列-11纳米机器人

纳米机器人我们保护纳米机器人的第一次尝试失败了。
常规武器不起作用。
这就是为什么在我们之前登陆这个星球的外星机器人被摧毁的原因。
外星人很快意识到为什么这个星球上没有人居住。
之前的发展竞赛被纳米机器人的发明摧毁了。
为了不重蹈他们的覆辙,我们必须想办法对付纳米机器人!我们的时间很短!这些微型机器人被设计用来回收垃圾和废物。
他们配备了强大的人工智能,必须解决地球上的环境问题。
然而,出了问题……我们在地球上也面临着废物处理和储存的问题。
当我们飞走的时候,分类和回收是很重要的。
此外,一些废物被分解成等离子体成分。
在这个星球上,我们已经看到了对生态不负责任的态度会导致什么后果。
当行星的状况已经非常危急的时候,一个轻率的决定导致了这个行星被永远地留下了。
你怎么想怎么和纳米机器人作战?我们有时间研发低温爆震器,但为时已晚。
我们没有时间去尝试。
我们可以尝试加入我们的努力,完成它!这似乎是我们唯一的机会!这个机器人,配备了低温爆破器,应该能把纳米机器人冷冻很长时间。
如果我们不能燃烧,我们就会被冻结!马达驱动机器人运动。
倾斜传感器用于确定低温炸药的位置。
机器人的非驱动轮安装在一个可移动的杠杆上。
这种“悬架”确保更好的车轮与表面接触。
这个驱动器使用减速档。
由于这一点,机器人移动缓慢,但更大的力量。
齿轮8安装在电机轴和车轮轴上-齿轮24。
后轮有一个共同的轴,所以驱动是馈给左右轮。
由于蜗轮的使用,在机器人的运动过程中暴露的角度不会改变。
手动曝光角度由倾斜传感器测量。
为了防止轴的末端滑动,安装了两个12齿齿轮。
所以用手旋转它更方便更容易。
wedo2.0太空系列-6探测器

船长!接近峡谷时,我们的机器人开始探测到一个无 法理解的无线电信号。他肯定不是我们的,因为机 器人不能破译它。我们自己不是在这里吗
不幸的是,地质机器人无法找到未知信号的来源。 我们将紧急安排探险队去寻找!我们的侦察全地形车 有你需要的所有装备
祝贺你完成新家园 任务的下一阶段!
对任务开始后时间的详细描述Fra bibliotek地球表面
机器 目前的资源发现 人
所需的资源数 量
资源检测器信 号功率
向前
停止
门
所收集的资源 的总数
测试。当机器人探测矿物样品时,你可以在屏幕上看到样 品的组成(这将发送“显示结果”的信息)。收集所需的资 源!
更改每个找到的对象带来的资源数量的范围。要做到这 一点,转到资源精灵和confiqure适当的部分程序:
发现和收集资源 探测器
我们开始在地球上生产机器人。通过这些,我 们可以继续寻找和收集有用的资源。我们需要 找一个地质学家去工作,然后派他去探索这个 星球。
机器人必须装备一个传感器来扫描和重新识 别发现的资源。每个这样的机器人都必须填 满它的矿物箱。佬司会告诉你更多。
对这颗行星表面组成的研究是极其重要的。表面 的成分可以告诉我们很多关于这个星球的过去, 以及什么有用的资源可以被提取。下面的视频介 绍了对火星“好奇号”漫游者的此类研究。
完成机械手和机器人的细节。
把机器人的零件放在正 确的位置
测试机器人。当接收到“移动”消息时,编程 向前移动。在机器人sorite scits中编写程序
根据Smarthub是使用蓄电池还是电池,以及电池的充电水 平,可能需要不同的电机功率。为你的机器人设置好!
你对采矿作业了解多少?你附近开采的是什么矿物?
对火星表面的初步探测表明,在空间站附近,我 们的机器人可以找到石油、锂、铜、铁和铝。其 主体为普通玄武岩-火山岩。
WEDO2.0-装甲战士

3、在同等距离的情况下测试功率不同的机器人所用的时长并加以记录。
总结
装甲骑兵
一、联系
看视频回答问题
A星际战争爆发之际,地球人该怎样保护 自己? 机器人战士
B机器人战士应具备的功能 1行走 2感应 3战斗
二、建构
A
一 腿 部 搭 建
二 身 体 搭 建
7单位灰轴
6单位黑轴
4
单 位 黑 轴
பைடு நூலகம்
三 头 部 搭 建
四 组 装 改 建
B
一、让机器人向前移动 二、添加运动传感器,发出指令后机器人快速向前移动.
三、运用字母启动块同时启动感应器、马达、警报灯以及声音
三、反思
一、改装过程中,机器人左右不对称会发生什么状况?
二、马达的功率必须到达数字几时才能保证机器人正常行走?
四、延续
一、为了保证机器人的灵活,机械师们需要对机器人进 行日常检测。
1、用显示计时模块为机器人编一个计时程序 。
2、用传感器启动机器人运行的同时自动计时。
wedo2.0太空系列-11横冲直撞

机器人比赛横冲直撞大家好!事实证明,当我们打开我们的新朋友时,我们也打开了机器人的紧急信号灯。
所以,我希望,一艘和平的救援船进入地球轨道。
我讲述了我们对自身和技术的探索,以及我们如何在太空旅行中不断得到帮助。
讲述他们如何完成最困难和危险的任务。
为了表彰他们的功绩,我们决定为机器人组织一次体育比赛。
每队必须开发自己的机器人并参加比赛。
机器人之间经常举行各种比赛。
一些是为了确定最快的机器人。
其他的机器人是最精确的,而我们的比赛是为了确定最强的机器人。
相扑机器人经常被用来确定最强的机器人。
的。
竞争的本质是把对手推到圈外你认为最好的相扑机器人应该是什么?看看下面显示的机器人。
他们的共同点吗?你认为这个设计有什么共同特点?你可能已经注意到,相扑机器人通常配备一个保险杠。
在机器人的前面。
这个缓冲器帮助在碰撞中转向对手的机器人,同时避免转向自己。
此外,如果这些机器人有轮子的话,它们通常是全轮驱动的。
履带作业也可以找到,但它们的速度较慢,而且通常对环的平面附着力较差。
四轮驱动要求能够竞争,甚至当部分车轮离开表面,由于碰撞。
这个机器人的底盘很容易修改,可以创建自己的机器人战士!马达驱动机器人运动。
运动传感器是向上的,这样机器人就可以通过手的位置来控制。
在变速器中,机器人使用一个角齿轮减速。
这使得机器人移动得更慢,但却付出了更大的努力。
在基本设计中,机器人执行机构仅馈给机器人的前轴。
设计自己的机器人给机器人设定前进3秒的程序。
检查机制。
在场景脚本中编写程序跟随机器人的状态。
默认情况下,机器人会返回。
如果你举起手,它就开始向前移动。
这导致马达发热。
监控屏幕上电机图标的状况。
长时间向前运动会导致电机过热。
强迫它向后运动。
不要试图推你的机器人!如果到手的距离太短,就会失去-系统会立即过热。
wedo2.0太空系列-7全地形车

搜索全地形车探测器帮助我们收集了足够的资源来发展这个基地。
在收集和分析样本的过程中,它探测到一个难以理解的信号,来自附近的峡谷。
由于地质机器人没有配备必要的仪器,它找不到信号的来源。
今天我们将专门为这个任务创建一个机器人。
凯文,报告我们的情况!你可以使用特殊的定向天线来确定无线电的方向。
源。
它们只能很好地接受来自一个方向的信号。
为了确定信号源的方向,这样的天线必须旋转。
在信号电平最高的地方,会有一个信号源的方向。
你在哪里找到这样的天线的?在这种天线中,“天线板”的工作原理就像一面镜子。
它把落在它上面的信号反射到它前面的接收器上。
根据我的数据峡谷岩壁中含有的矿物质会让信号。
这就是为什么,信号源的方向需要不断改进。
这个研究机器人配备了一个寻找信号源的天线。
马达驱动机器人运动。
倾斜传感器连接到天线手动旋转机构。
正因为如此,它有助于明确它的方向。
在机器人的后面,有一个可移动的斜坡,机组人员可以在上面行走。
可以走很舒服。
电动机的传动装置通过皮带传动装置传送到轮子上。
它降低了车轮轴的旋转速度约三倍(相对于电机轴的旋转速度)。
你为什么这么认为?只有两个后轮驱动。
前轮有支撑力。
倾斜传感器固定在旋转水平轴的部件上。
由于anqular驱动,旋转被传送到垂直轴上,定向天线就固定在垂直轴上。
传感器可以偏离大约45度任何一方。
天线。
然后左右旋转75度。
你为什么这么认为?前轮和中间轮固定在一根可移动的横梁上。
这种悬挂允许车轮移动,几乎总是接触表面。
WEDO2.0科学漫游器机器人
谢谢
主讲人:Even老师
Physical Construction
010203040506
07
08
09
10
逻辑编程
Logic Programming
03
编程
让机器人在检测到植物后发出声音。 我们应该如何编程呢?
互相说明机器人是怎样工作的?
巩固拓展
Consolidate and Extend
04
本节重点
WEDO2.0-科学漫游器
主讲人:Even老师
情景导入
科学家和工程师总是勇于挑战自我, 敢于探索遥远的星球。 为了能够成功地完成这次旅行, 他们已经设计了航天器、漫游器、卫星和机器人 来帮助他们探索和搜集新地域的数据。
小问题
但是 实际上有些地方是科学家与工程师无法到达的。
我们应该怎么办呢?
实物搭建
WeDo2.0机器人编程等级测评考试题库(1级卷)(含答案)
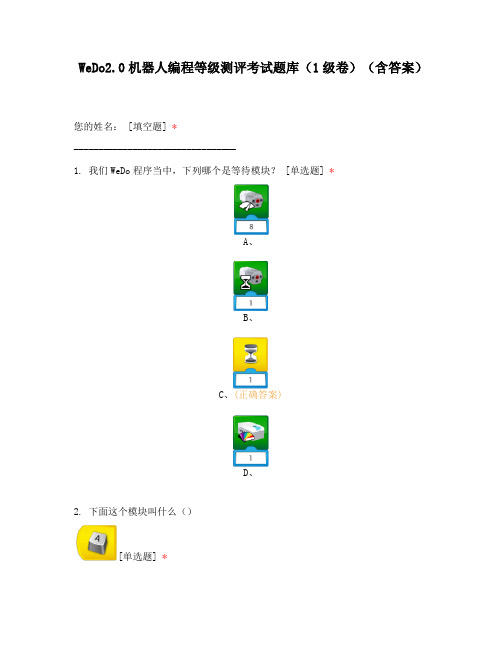
WeDo2.0机器人编程等级测评考试题库(1级卷)(含答案)您的姓名: [填空题] *_________________________________1. 我们WeDo程序当中,下列哪个是等待模块? [单选题] *A、B、C、(正确答案)D、2. 下面这个模块叫什么()[单选题] *A、开始模块B、等待模块C、字母模块D、按键模块(正确答案)3. 这个模块的作用是()[单选题] *A、设置前进的速度B、设置集线器的电量C、设置集线器的运行时间D、设置集线器灯光的颜色(正确答案)4. 下面的这个程序,如果运行后机器人的前进速度是()[单选题] *A、5B、8(正确答案)C、65. 下面的这个程序,机器人运行多长时间会停止()[单选题] * A、8B、5C、6D、9(正确答案)6. 下面的程序,运行哪个程序链机器人的运行速度会是7()[单选题] * ABC(正确答案)D7. 运行下面的程序,机器人会运行多长时间()[单选题] *A、5B、123C、7D、不知道,随机的(正确答案)8. 下面哪个程序是用来探测机器人前方有障碍物的() [单选题] *A、B、(正确答案)C、D、9. 如果我将倾斜传感器向前倾斜,那么我机器人的运行速度是()[单选题] *A、5B、6C、7(正确答案)D、810. 下面的匀加速程序中,速度达到多少会停止运行()[单选题] *A、2B、1(正确答案)C、123D、811. 滑轮之间传动需要什么? [单选题] *A、橡皮筋(正确答案)B、啮合C、齿轮D、杠杆12. 几个点可以确定一条直线? [单选题] *A、3点B、2点(正确答案)C、1点D、4点13. 下列哪个传动结构是加速的() [单选题] *A 、小齿轮带动大齿轮;B 、小齿轮带动小齿轮C、大齿轮带动小齿轮(正确答案)D、大齿轮带动大齿轮14. 锥齿轮有什么作用? [单选题] *A、加速B、减速C、改变齿轮传动方向(正确答案)D、为了美观15. 大齿轮与小齿轮咬合,24齿的转一圈8齿的齿轮转多少圈? [单选题] *A、3圈(正确答案)B、8圈C、2圈D、1圈16. 下列传动中哪些传动的方向是正确的? [单选题] *A、B、C、D、(正确答案)17. 下列哪些图形是对称的? [单选题] *A、B、(正确答案)C、D、18. 蜗轮蜗杆有什么特点? [单选题] *A、减速系统;自锁作用;省力;改变齿轮传动方向(正确答案)B、减速系统;省力;改变齿轮传动方向C、加速系统;自锁作用;费力;改变齿轮传动方向D、加速系统;自锁作用;省力;改变齿轮传动方向19. 蜗轮蜗杆装置由以下哪些零件组成? [单选题] *A、轴、40齿齿轮、蜗杆B、销、24齿齿轮、蜗杆C、轴、8齿齿轮、蜗杆D、轴、24齿齿轮、蜗杆(正确答案)20. (多选题)下列属于皮带传动的特点的是() *A、有0字和8字两种安装方式,使用0字安装的话,两个滑轮转动的方向相同(正确答案)B、有0字和8字两种安装方式,使用0字安装的话,两个滑轮转动的方向相反C、有0字和8字两种安装方式,使用8字安装的话,两个滑轮转动的方向相同D、有0字和8字两种安装方式,使用8字安装的话,两个滑轮转动的方向相反(正确答案)21. WEDO器材盒中有多少个传感器? [单选题] *12(正确答案)3422. 下图中哪个是电机?[单选题] *左边的(正确答案)右边的23. 下列作品中用到了哪个传感器?[单选题] *集线器倾斜传感器运动传感器(正确答案)24. 下列模块中,运用到了哪个传感器?[单选题] *运动传感器(正确答案)倾斜传感器25. 搭建完成后发现电机不转应该检查哪里? [单选题] *集线器电池是否没电检查模块是否正确电机线是否与集线器连接并插好选项都对(正确答案)26. 搭建任务是:“当有人时,电风扇转动”需要用到哪个传感器 [单选题] *倾斜传感器运动传感器(正确答案)27. 电机功率最大为多少[单选题] *510(正确答案)1000没有上限28. 图中两个模块代表了电机的?[单选题] *方向(正确答案)速度转动29. 如果遇到同学拿着电机线甩着玩,你应该? [单选题] *再拿一个跟他一块甩马上制止马上制止并提醒同学电机不可以拽着线甩,否则容易损坏电线(正确答案) 30. 集线器的灯不亮是因为 [单选题] *电池没电电池装反了集线器坏了三种都有可能(正确答案)31. 图中教具名称为[单选题] *传感器集线器(正确答案)电机[单选题] *传感器集线器电机(正确答案)[单选题] *运动传感器(正确答案)倾斜传感器声音传感器[单选题] *运动传感器倾斜传感器(正确答案)声音传感器35. 图中搭建风扇叶的教具名称为[单选题] *2*4薄片2*6薄片2*8薄片(正确答案)36. 图中教具名称为[单选题] *轴销(正确答案)轴销37. 图中教具名称为[单选题] *轴轴套轴连接器(正确答案)38. 图中教具名称为[单选题] *轴全轴套(正确答案)半轴套39. 图中教具名称为[单选题] *轴全轴套半轴套(正确答案)40. 图中教具名称为[单选题] *全轴套半轴套41. 图中是什么模块 [单选题] *开始(正确答案)停止速度42. 图中是什么模块 [单选题] *开始停止(正确答案)速度43. 图中是什么模块 [单选题] *方向时间44. 图中是什么模块 [单选题] *速度时间(正确答案)等待45. 图中是什么模块 [单选题] *速度时间方向(正确答案)46. 图中是什么模块 [单选题] *时间等待(正确答案)速度47. 下列哪个程序是“方向-速度-时间” [单选题] *A(正确答案)BC48. 图中程序运行效果是:逆时针方向以3的速度运行4秒 [判断题] *对(正确答案)错49. 图中是什么模块 [单选题] *等待倾斜传感器等待运动传感器(正确答案)等待2秒50. 图中是什么模块 [单选题] *循环模块(正确答案)箭头模块重复模块51. 图中教具名称为[单选题] *1*4砖三孔梁(正确答案)四孔梁52. WEDO教具中最长的孔梁是 [单选题] *十四孔梁十五孔梁(正确答案)十六孔梁53. 图中教具名称为[单选题] *1*2砖(正确答案)2*2砖2*4砖54. 为WEDO机器人提供电力的是 [单选题] *集线器(正确答案)电机传感器55. 为WEDO机器人提供动力的是 [单选题] *集线器电机(正确答案)传感器56. 倾斜传感器可以感知任意方向的倾斜? [判断题] *对(正确答案)错57. 图中教具名称为[单选题] *单球砖(正确答案)双球砖2*2砖58. 图中教具名称为[单选题] *单球砖双球砖(正确答案)2*2砖59. 在WEDO作品搭建中,我们一般利用什么教具固定轴 *半轴套(正确答案)全轴套(正确答案)轴连接器60. 在WEDO作品搭建中,我们一般利用什么教具将两根轴连接起来 [单选题] *半轴套全轴套轴连接器(正确答案)61. 汉堡包结构由几个梁和几个薄片组成? [单选题] *A、两个梁和两个薄片(正确答案)B、两个梁和一个薄片C、四个梁和四个薄片D、两个梁和四个薄片62. 汉堡包结构的作用是? [单选题] *A、省力B、固定(正确答案)C、好看D、增高63. 下列不属于杠杆原理的是? [单选题] *A、跷跷板B、筷子(正确答案)C、天平D、秋千64. 乐高中最结实的结构是? [单选题] *A、曲柄摇杆B、互锁结构(正确答案)C、棘轮棘爪D、皮带传动65. 棘轮棘爪结构的作用是?[单选题] *A、加速结构B、减速结构(正确答案)C、防止倒转D、用来互锁66. 下面这个结构的名字叫?[单选题] *A 、棘轮棘爪B 、蜗轮蜗杆C、齿轮齿条(正确答案)D、曲柄摇杆67. 下面蜗轮蜗杆结构中,哪根轴是可以用手进行转动的?[单选题] *A、红色的B、绿色的(正确答案)68. 在我们曲柄摇杆结构当中,做圆周运动的是哪个部分?[单选题] *A、曲柄(正确答案)B、摇杆C、连杆D、机架69. 在我们曲柄摇杆结构当中,做扇形运动的是哪个部分?[单选题] *A、曲柄B、摇杆(正确答案)C、连杆D、机架70. (多选题)下列结构中,有减速特点的是? *A、蜗轮蜗杆(正确答案)B、小齿轮带动大齿轮(正确答案)C、曲柄摇杆D、齿轮齿条71. 这两个电机方向模块,代表顺时针方向的是? [单选题] *选项1(正确答案)选项272. 下图中运动传感器的模式,代表“任何距离变化的是”[单选题] *A(正确答案)BC73. 此模块状态代表了倾斜传感器 [单选题] *向上倾斜(正确答案)向下倾斜不倾斜74. 倾斜传感器有几种模式 [单选题] *1种3种6种(正确答案)答案解析:分别是 1 向上倾斜 2向下倾斜 3向此侧倾斜 4向彼侧倾斜 5不倾斜6震动75. 这个模块是? [单选题] *电机时间模块(正确答案)等待模块电机功率模块76. 这个模块是 [单选题] *电机停止模块(正确答案)所有程序停止模块电机方向模块77. 集线器什么颜色的灯代表已经连接成功 [单选题] *蓝色(正确答案)红色黄色78. 连接平板与集线器的方法是:[单选题] *先点击右上角集线器图标,再点击集线器名称直到集线器蓝灯亮起先点击右上角集线器图标,按下集线器按钮,再点击集线器名称直到集线器蓝灯亮起(正确答案)直接按下集线器按钮即可连接79. 传感器模块可以单独使用吗[单选题] *可以不可以(正确答案)80. 要想满足WEDO作品搅拌器当“搅拌器向下倾斜时搅拌器转动”需要用到哪个传感器模块 [单选题] *运动传感器模块倾斜传感器模块(正确答案)声音模块等待模块。
幼儿搭建侦查机器人教案
幼儿搭建侦查机器人教案一、教学目标1. 认识机器人,了解机器人的基本功能和应用领域;2. 培养幼儿动手能力和创造力,通过搭建机器人的过程,提高幼儿的动手能力和解决问题的能力;3. 培养幼儿的合作意识,让幼儿在小组中合作完成机器人的搭建和调试;4. 培养幼儿的观察和分析能力,通过机器人的使用,培养幼儿的观察和分析能力。
二、教学重点和难点重点:让幼儿了解机器人的基本功能和应用领域,培养幼儿的动手能力和创造力。
难点:让幼儿在小组中合作完成机器人的搭建和调试,培养幼儿的观察和分析能力。
三、教学准备1. 准备教具:机器人搭建套装、电池、螺丝刀、说明书等;2. 教师准备:了解机器人的基本知识,掌握机器人搭建的方法和步骤;3. 教学环境:保证教学环境整洁、安全。
四、教学过程1. 导入新知识(5分钟)教师向幼儿介绍机器人的概念,让幼儿了解机器人的基本功能和应用领域。
通过图片、视频等形式,让幼儿对机器人有一个直观的认识。
2. 搭建机器人(30分钟)将幼儿分成小组,每个小组配备一套机器人搭建套装和说明书。
教师向幼儿讲解机器人搭建的基本步骤和注意事项,然后让幼儿根据说明书,利用搭建套装中的零部件,动手搭建机器人。
在搭建的过程中,教师可以引导幼儿讨论和合作,培养幼儿的合作意识。
3. 调试机器人(20分钟)当机器人搭建完成后,教师向幼儿讲解机器人的调试方法和注意事项。
然后让幼儿根据教师的指导,对机器人进行调试,测试机器人的基本功能。
4. 使用机器人(15分钟)让幼儿在教师的指导下,使用机器人进行一些简单的任务,如巡逻、侦查等。
通过使用机器人,培养幼儿的观察和分析能力。
5. 总结(10分钟)教师和幼儿一起总结本节课的内容,回顾机器人的搭建和使用过程,让幼儿对机器人有一个清晰的认识。
五、教学反思通过本节课的教学,幼儿对机器人有了一个直观的认识,了解了机器人的基本功能和应用领域。
通过搭建机器人的过程,培养了幼儿的动手能力和创造力,培养了幼儿的合作意识和观察分析能力。
wedo20跟随小车教案
wedo20跟随小车教案WEDO 2.0 跟随小车教案本教案旨在帮助学生通过使用LEGO Education WEDO 2.0 编程软件和相应的控制器,学习如何设计和编程一个可以自动跟随线路的小车。
学生将通过这个项目来提高编程思维、掌握基本编程概念以及培养解决问题的能力。
教学目标:1. 学习如何使用WEDO2.0 编程软件和相应的控制器。
2. 理解传感器的作用和原理,并学会使用传感器控制小车的运动。
3. 学习编程逻辑和语法,能够编写简单的程序指导小车在特定路径上跟随线路。
4. 提高学生的团队合作和解决问题的能力。
教学准备:1. WEDO2.0 套件包括控制器、电机和传感器等元件。
2. 一张设计良好的线路图。
3. 计算机上安装有WEDO 2.0 编程软件。
教学过程:步骤一:介绍WEDO 2.01. 向学生介绍WEDO2.0 套件以及其中的控制器、电机和传感器等元件。
2. 解释学生可以用这些元件创造不同的机械设备,并通过编程实现控制。
步骤二:理解传感器的作用和原理1. 解释传感器是WEDO2.0 中重要的元件,它们可以感知和接收外界的信息。
2. 介绍不同类型的传感器,如接近传感器和颜色传感器等,以及它们的工作原理。
步骤三:设计小车1. 分组让学生合作设计一个小车,确保它能在线路上自动跟随。
2. 强调每个小组要确保小车具有足够的稳定性,可以固定相应的传感器。
步骤四:编程小车1. 向学生展示如何使用WEDO2.0 编程软件。
2. 教授基本的编程概念,如顺序、循环和条件语句等。
3. 指导学生如何使用编程语言编写程序,控制小车在线路上跟随。
步骤五:测试和调试1. 让学生将他们设计好的小车放在线路上进行测试。
2. 强调测试的重要性,并鼓励学生通过观察和记录调试小车的问题。
步骤六:分享和总结1. 让每个小组分享他们的设计和编程经验。
2. 引导学生回顾整个项目,总结他们在设计与编程过程中遇到的挑战和解决问题的方法。
WeDo2
WeDo2.0机器人编程等级测评考试题库(1级卷)(含答案)您的姓名: [填空题] *_________________________________1.我们WeDo程序当中, 下列哪个是等待模块.[单选题.*A、B、C.(正确答案)D、2.下面这个模块叫什么()[单选题.*A.开始模块A、开始模块B.等待模块C.字母模块D.按键模块(正确答案)3.这个模块的作用是()[单选题.*A.设置前进的速度A、设置前进的速度B.设置集线器的电量C.设置集线器的运行时间D.设置集线器灯光的颜色(正确答案)4.下面的这个程序, 如果运行后机器人的前进速度是()[单选题.*A、5B.8(正确答案)C、65.下面的这个程序, 机器人运行多长时间会停止()[单选题.*A、8B、5C、6D.9(正确答案)6.下面的程序, 运行哪个程序链机器人的运行速度会是7()[单选题.*ABC(正确答案)D7.运行下面的程序, 机器人会运行多长时间()[单选题.*A、5C、7D、不知道, 随机的(正确答案)8.下面哪个程序是用来探测机器人前方有障碍物的(.[单选题.*A、B.(正确答案)C、D、9.如果我将倾斜传感器向前倾斜, 那么我机器人的运行速度是()[单选题.*A、5B、6C.7(正确答案)D、810.下面的匀加速程序中, 速度达到多少会停止运行()[单选题.*B.1(正确答案)C.123D、811.滑轮之间传动需要什么.[单选题.*A.橡皮筋(正确答案)A、橡皮筋(正确答案)B.啮合C.齿轮D.杠杆12.几个点可以确定一条直线.[单选题.*A.3点A、3点B.2点(正确答案)C.1点D.4点13.下列哪个传动结构是加速的(.[单选题.*A 、小齿轮带动大齿轮;B 、小齿轮带动小齿轮C.大齿轮带动小齿轮(正确答案)D.大齿轮带动大齿轮14.锥齿轮有什么作用.[单选题.*A.加速A、加速B. 减速C.改变齿轮传动方向(正确答案)D.为了美观15.大齿轮与小齿轮咬合, 24齿的转一圈8齿的齿轮转多少圈.[单选题.*A.3圈(正确答案)A、3圈(正确答案)B.8圈C.2圈D.1圈16.下列传动中哪些传动的方向是正确的.[单选题.*A、B、C、D.(正确答案)17.下列哪些图形是对称的.[单选题.*A、B.(正确答案)C、D、18.蜗轮蜗杆有什么特点.[单选题.*A.减速系统;自锁作用;省力;改变齿轮传动方向(正确答案)A、减速系统;自锁作用;省力;改变齿轮传动方向(正确答案)B.减速系统;省力;改变齿轮传动方向C.加速系统;自锁作用;费力;改变齿轮传动方向D.加速系统;自锁作用;省力;改变齿轮传动方向19.蜗轮蜗杆装置由以下哪些零件组成.[单选题.*A.轴、40齿齿轮、蜗杆A、轴、40齿齿轮、蜗杆B.销、24齿齿轮、蜗杆C.轴、8齿齿轮、蜗杆D.轴、24齿齿轮、蜗杆(正确答案)20.(多选题)下列属于皮带传动的特点的是(.*A、有0字和8字两种安装方式, 使用0字安装的话, 两个滑轮转动的方向相同(正确答案)A.有0字和8字两种安装方式,使用0字安装的话,两个滑轮转动的方向相同(正确答案)A、有0字和8字两种安装方式,使用0字安装的话,两个滑轮转动的方向相同(正确答案)B、有0字和8字两种安装方式, 使用0字安装的话, 两个滑轮转动的方向相反C、有0字和8字两种安装方式, 使用8字安装的话, 两个滑轮转动的方向相同D、有0字和8字两种安装方式, 使用8字安装的话, 两个滑轮转动的方向相反(正确答案)21.WEDO器材盒中有多少个传感器.[单选题.*12(正确答案)3422.下图中哪个是电机? .[单选题.*左边的(正确答案)右边的23.下列作品中用到了哪个传感器? .[单选题.*集线器倾斜传感器运动传感器(正确答案)24.下列模块中, 运用到了哪个传感器? .[单选题.*运动传感器(正确答案)倾斜传感器25.搭建完成后发现电机不转应该检查哪里.[单选题.*集线器电池是否没电检查模块是否正确电机线是否与集线器连接并插好选项都对(正确答案)26.搭建任务是: “当有人时, 电风扇转动.需要用到哪个传感.[单选题.* 倾斜传感器运动传感器(正确答案)27.电机功率最大为多少.[单选题.*510(正确答案)1000没有上限28.图中两个模块代表了电机的?.[单选题.*方向(正确答案)速度转动29.如果遇到同学拿着电机线甩着玩, 你应该.[单选题.*再拿一个跟他一块甩马上制止马上制止并提醒同学电机不可以拽着线甩, 否则容易损坏电线(正确答案)30.集线器的灯不亮是因.[单选题.*电池没电电池装反了集线器坏了三种都有可能(正确答案)31.图中教具名称为[单选题.*传感器集线器(正确答案)电机32.图中教具名称为[单选题.*传感器集线器电机(正确答案)33.图中教具名称为[单选题.*运动传感器(正确答案)倾斜传感器声音传感器34.图中教具名称为[单选题.*运动传感器倾斜传感器(正确答案)声音传感器35.图中搭建风扇叶的教具名称为[单选题.*2*4薄片2*6薄片2*8薄片(正确答案)36.图中教具名称为[单选题.*轴销(正确答案)轴销37.图中教具名称为[单选题.*轴轴套轴连接器(正确答案)38.图中教具名称为[单选题.*轴全轴套(正确答案)半轴套39.图中教具名称为[单选题.*轴全轴套半轴套(正确答案)40.图中教具名称为[单选题.*轴(正确答案)全轴套半轴套41.图中是什么模.[单选题.* 开始(正确答案)停止速度42.图中是什么模.[单选题.* 开始停止(正确答案)速度43.图中是什么模.[单选题.*方向速度(正确答案)时间44.图中是什么模.[单选题.*速度时间(正确答案)等待45.图中是什么模.[单选题.*速度时间方向(正确答案)46.图中是什么模.[单选题.*时间等待(正确答案)速度47.下列哪个程序是“方向-速度-时间.[单选题.*A(正确答案)BC48.图中程序运行效果是: 逆时针方向以3的速度运行4.[判断题.* 对(正确答案)错49.图中是什么模.[单选题.*等待倾斜传感器等待运动传感器(正确答案)等待2秒50.图中是什么模.[单选题.*循环模块(正确答案)箭头模块重复模块51.图中教具名称为[单选题.*1*4砖三孔梁(正确答案)四孔梁52.WEDO教具中最长的孔梁.[单选题.*十四孔梁十五孔梁(正确答案)十六孔梁53.图中教具名称为[单选题.*1*2砖(正确答案)2*2砖2*4砖54.为WEDO机器人提供电力的.[单选题.*集线器(正确答案)电机传感器55.为WEDO机器人提供动力的.[单选题.*集线器电机(正确答案)传感器56.倾斜传感器可以感知任意方向的倾斜.[判断题.* 对(正确答案)错57.图中教具名称为[单选题.*单球砖(正确答案)双球砖2*2砖58.图中教具名称为[单选题.*单球砖双球砖(正确答案)2*2砖59.在WEDO作品搭建中, 我们一般利用什么教具固定.*半轴套(正确答案)全轴套(正确答案)轴连接器60.在WEDO作品搭建中, 我们一般利用什么教具将两根轴连接起.[单选题.* 半轴套全轴套轴连接器(正确答案)61.汉堡包结构由几个梁和几个薄片组成.[单选题.*A.两个梁和两个薄片(正确答案)A、两个梁和两个薄片(正确答案)B.两个梁和一个薄片C.四个梁和四个薄片D.两个梁和四个薄片62.汉堡包结构的作用是.[单选题.*A.省力A、省力B.固定(正确答案)C.好看D.增高63.下列不属于杠杆原理的是.[单选题.*A.跷跷板A、跷跷板B.筷子(正确答案)C.天平D.秋千64.乐高中最结实的结构是.[单选题.*A.曲柄摇杆A、曲柄摇杆B.互锁结构(正确答案)C.棘轮棘爪D.皮带传动65.棘轮棘爪结构的作用是?[单选题.*A.加速结构A、加速结构B.减速结构(正确答案)C.防止倒转D.用来互锁66.下面这个结构的名字叫?[单选题.*A 、棘轮棘爪B 、蜗轮蜗杆C.齿轮齿条(正确答案)D.曲柄摇杆67.下面蜗轮蜗杆结构中, 哪根轴是可以用手进行转动的?[单选题.*A.红色的A、红色的B. 绿色的(正确答案)68.在我们曲柄摇杆结构当中, 做圆周运动的是哪个部分?[单选题.*A.曲柄(正确答案)A、曲柄(正确答案)B.摇杆C.连杆D.机架69.在我们曲柄摇杆结构当中, 做扇形运动的是哪个部分?[单选题.*A.曲柄A、曲柄B.摇杆(正确答案)C.连杆D.机架70.(多选题)下列结构中, 有减速特点的是.*A.蜗轮蜗杆(正确答案)A、蜗轮蜗杆(正确答案)B.小齿轮带动大齿轮(正确答案)C.曲柄摇杆D.齿轮齿条71.这两个电机方向模块, 代表顺时针方向的是.[单选题.*选项1(正确答案)选项272.下图中运动传感器的模式, 代表“任何距离变化的是”.[单选题.*A(正确答案)BC73.此模块状态代表了倾斜传感器.[单选题.*向上倾斜(正确答案)向下倾斜不倾斜74.倾斜传感器有几种模.[单选题.*1种3种6种(正确答案)答案解析: 分别是 1 向上倾斜 2向下倾斜 3向此侧倾斜 4向彼侧倾斜 5不倾斜6震动75.这个模块是? .[单选题.*电机时间模块(正确答案)等待模块电机功率模块76.这个模块是.[单选题.*电机停止模块(正确答案)所有程序停止模块电机方向模块77.集线器什么颜色的灯代表已经连接成.[单选题.*蓝色(正确答案)红色黄色78.连接平板与集线器的方法是: .[单选题.*先点击右上角集线器图标, 再点击集线器名称直到集线器蓝灯亮起先点击右上角集线器图标,再点击集线器名称直到集线器蓝灯亮起先点击右上角集线器图标, 按下集线器按钮, 再点击集线器名称直到集线器蓝灯亮起(正确答案)直接按下集线器按钮即可连接79.传感器模块可以单独使用吗.[单选题.*可以不可以(正确答案)80.要想满足WEDO作品搅拌器当“搅拌器向下倾斜时搅拌器转动”需要用到哪个传感器模.[单选题.*运动传感器模块倾斜传感器模块(正确答案)声音模块等待模块。
WEDO机器人搭建手册
WeDo早期机器人课程西觅亚公司版权所有二零零八年六月WeDo‐‐‐‐‐12个主题活动目录 编号 活动名称 教学目标1 跳舞的小鸟 机械:了解皮带传动的特点不同大小滑轮传动速度的变化 编程:了解WEDO的编程界面学会使用马达以及声音模块2 聪明的陀螺 机械:了解齿轮传动的特点不同齿数的齿轮传动的速度变化 编程:感受运动传感器的功能感受显示模块和循环模块的功能3 打鼓的猴子 机械:了解凸轮的作用不同凸轮组合对机械臂运动方式的影响 编程:运用电脑键盘来控制音乐4 饥饿的鳄鱼 机械:了解冠状齿轮的传动方式齿轮传动和皮带传动的组合编程:学习马达不同的旋转方向以及等待模块的功能 了解运动传感器的功能和循环模块的功能5 怒吼的狮子 机械:了解小齿轮和冠状齿轮的传动编程:电脑键盘、声音模块以及马达的组合运用 感受倾角传感器的功能6 会飞的鸟 机械:了解平衡和支点灵活运用凸轮编程:学习倾角传感器的功能 运用运动传感器7 足球射门员 机械:了解支点和运动的关系编程:感受球射的远近与马达功率及其它因素的关系 运动传感器的运用8 足球守门员 机械:了解联杆系统的运动传动方式编程:学习随机模块的功能了解显示模块和运动传感器的结合,形成一个计数系统9 啦啦队 机械:灵活运用凸轮,掌握齿轮组的传动编程:运用声音模块综合运用运动传感器和声音模块的组合10 飞机营救 机械:马达带动螺旋桨编程:学习倾角传感器和马达模块组合11 逃跑的巨人 机械:学习涡轮的结构和功能 编程:了解条件循环模块功能12 暴风雨中的小船 机械:学习平衡和连杆传动编程:学习随机模块的功能综合运用倾角传感器和声音模块的组合软件的使用打开WEDO软件后,电脑桌面上全屏出现下面的图面。
软件窗口的右上角为主工具栏,单击后可出现下拉菜单,菜单中有3个选项。
从上往下分别是“关闭”、“打开”、“新建”。
关闭:关闭WEDO软件。
打开:打开电脑中已有的WEDO程序文件,文件后缀名为“.WeDo”。
wedo0 长劲鹿教案
wedo0 长劲鹿教案教案标题:WeDo 2.0 长劲鹿教案教学目标:1. 了解WeDo2.0教育套件的基本组成和功能。
2. 学习如何使用WeDo 2.0进行编程和机器人控制。
3. 培养学生的创造力、逻辑思维和问题解决能力。
教学资源:1. WeDo2.0教育套件:包括编程软件、传感器、电机等。
2. 计算机或平板电脑。
教学准备:1. 确保每个学生组有一个WeDo2.0教育套件。
2. 下载并安装WeDo 2.0编程软件。
教学步骤:引入活动:1. 向学生介绍WeDo2.0教育套件,并解释其用途和功能。
2. 引导学生思考,如何利用WeDo 2.0来解决问题和完成任务。
探究活动:1. 将学生分成小组,每个小组配备一个WeDo2.0教育套件。
2. 让学生自由探索WeDo 2.0的各个组件,并了解它们的功能和使用方法。
3. 引导学生通过实践操作,了解如何连接传感器和电机,并进行编程控制。
合作活动:1. 给学生提供一个具体的任务或问题,例如:设计一个能够自动移动的机器人,帮助长劲鹿找到食物。
2. 学生分组合作,利用WeDo 2.0教育套件设计并编程他们的机器人,解决问题。
3. 鼓励学生在设计和编程过程中尝试不同的方法和思路,并进行反思和改进。
展示和评价:1. 每个小组展示他们设计的机器人,并演示它们的功能和解决问题的能力。
2. 学生之间进行互动和交流,分享彼此的经验和观点。
3. 教师对学生的表现进行评价,并提供积极的反馈和建议。
延伸活动:1. 鼓励学生尝试更复杂的任务和问题,挑战他们的创造力和解决问题的能力。
2. 引导学生深入了解编程原理和机器人技术,拓展他们的知识和技能。
总结:1. 回顾本节课学习的内容和活动,总结WeDo2.0的基本使用方法和教育价值。
2. 引导学生思考,WeDo 2.0可以应用于哪些领域和实际问题的解决。
教学扩展:1. 鼓励学生参加机器人比赛或展览,展示他们的设计和编程成果。
2. 提供更多的编程挑战和项目,帮助学生进一步提升他们的编程和机器人控制能力。
wedo优秀教案
wedo优秀教案标题:WeDo优秀教案 - 引导学生探索机器人编程与工程设计教案概述:本教案旨在引导学生通过使用WeDo机器人套件,探索机器人编程和工程设计的基本概念。
通过实际操作和团队合作,学生将学习如何构建和编程机器人,以解决现实生活中的问题。
此教案适用于小学低年级的学生,旨在培养学生的创造力、逻辑思维和解决问题的能力。
教案目标:1. 了解机器人编程和工程设计的基本概念;2. 学会使用WeDo机器人套件构建机器人模型;3. 学习使用WeDo软件编程机器人执行特定任务;4. 培养学生的团队合作和沟通能力;5. 提高学生的创造力、逻辑思维和解决问题的能力。
教案步骤:引入活动:1. 介绍WeDo机器人套件的基本组成部分和功能;2. 引导学生思考机器人在日常生活中的应用,并讨论机器人编程的重要性。
实践操作:3. 将学生分为小组,每组提供一个WeDo机器人套件;4. 指导学生按照说明书的步骤,构建一个简单的机器人模型;5. 引导学生探索WeDo软件的界面和功能,学习如何编程机器人执行基本动作;6. 鼓励学生尝试不同的编程指令,观察机器人的反应,并进行调整和改进。
任务挑战:7. 提供一个具体的任务挑战,例如让机器人在指定路径上行走、捡起物体等;8. 引导学生团队合作,制定解决方案,并编写相应的程序代码;9. 学生通过实践操作,测试和调整他们的程序代码,直到机器人成功完成任务。
总结和展示:10. 学生小组展示他们的机器人模型和任务完成情况;11. 回顾学生的学习过程,讨论遇到的问题和解决方法;12. 引导学生总结他们从这个活动中学到的知识和技能。
教案评估:- 观察学生在实践操作中的参与度和合作能力;- 检查学生编写的程序代码是否能够成功控制机器人完成任务;- 评估学生在小组展示和讨论中的表现和理解程度。
教案扩展:1. 引导学生尝试更复杂的机器人模型和编程任务;2. 鼓励学生设计和解决自己感兴趣的问题,通过机器人实现;3. 引导学生学习更高级的编程概念和技巧,如条件语句和循环结构。
wedo机灵小鼠的知识点
wedo机灵小鼠的知识点一、wedo机灵小鼠是一款专为儿童编程教育设计的智能机器人,具有以下几个知识点:1. 编程基础知识:wedo机灵小鼠可以通过编程指令实现各种动作和功能。
儿童可以学习编程的基本概念,如循环、条件判断、变量等,通过编写代码来控制机器人的行为。
2. 传感器原理:wedo机灵小鼠搭载了多种传感器,如触摸传感器、声音传感器、光线传感器等。
儿童可以学习传感器的工作原理,了解如何通过传感器获取外部环境的信息,并根据需要做出相应的反应。
3. 机械结构设计:wedo机灵小鼠的机械结构经过精心设计,可以实现各种动作,如行走、转弯、抬头等。
儿童可以学习机械结构的基本原理,了解如何通过齿轮、电机等组件实现机器人的运动。
4. 创意思维培养:wedo机灵小鼠提供了丰富的编程教育项目和创意挑战,激发儿童的创造力和创新思维。
儿童可以通过自己的想法和创意设计机器人的行为,培养解决问题的能力和创造性思维。
二、wedo机灵小鼠的应用场景1. 学校教育:wedo机灵小鼠适用于学校教育中的编程教育课程,帮助儿童学习编程思维和科学原理。
通过编写代码控制机器人的行为,培养儿童的逻辑思维和问题解决能力。
2. 科普教育:wedo机灵小鼠可以作为科普教育的工具,帮助儿童了解机器人和科学技术的基本原理。
通过实际操作和实验,让儿童亲身体验科学的乐趣,提高对科学的兴趣和理解。
3. 课外活动:wedo机灵小鼠可以作为课外活动的一种有趣的学习工具,组织编程比赛、创意设计等活动,激发儿童的学习兴趣和动手能力。
同时,这些活动也可以培养儿童的团队合作和沟通能力。
4. 科技展示:wedo机灵小鼠可以作为科技展示的一种展品,向公众展示科技的魅力和应用前景。
通过展示机器人的功能和应用,吸引更多人对科学技术的关注,并激发更多人对科技创新的热情。
三、wedo机灵小鼠的优势特点1. 简单易用:wedo机灵小鼠的编程软件界面简单直观,易于操作和学习。
儿童无需具备专业的编程知识,就能快速上手,享受编程的乐趣。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实物搭建
Physical Construction
02
01
02
03
04
05
逻辑编程
Logic Programming
03
编程
让机器人在检测到运动时发出声音。 我们应该如何编程呢?
互相说明机器人是怎样工作的?
巩固拓展
Consolidate and Extend
04
本节重点
1.认识搭建所用的材料,搭建出人形侦查机器人; 2.熟悉了解WEDO的编程界面以及相应的程序块; 3.认识什么是传感器,以及传感器有什么作用。
WEDO2.0-侦查机器人
主讲人:Even老师
学习重点
搭建模型
练习动手能力: 通过搭建侦查机器人模型, 提高宝贝的动手能力。
了解传感器
提高认知能力: 认识什么传感器,并学习 蓝牙连接程序模块。
编写编程
逻辑思维能力: 锻炼孩子的逻辑思维能力, 编写程序控制传感器。
情景导入பைடு நூலகம்
Scenario Introduction
拓展
怎么让机器人一直运行下去?
谢谢
主讲人:Even老师
实物搭建
Physical Construction
逻辑编程
Logic Programming
巩固与拓展
Consolidate and Extend
目录
CONTENTS
情景导入
Teaching analysis
01
小故事
麦克斯和米娅想为他们的一个朋友举行一场宴会, 但是他们不知道这个朋友几点到。
所以他们需要一个东西来提醒。 于是他们决定搭建一个侦查机器人。 我们快来帮助他们吧!