基于视觉传感模块OV7670的颜色导航智能车设计
毕业设计基于图像传感器的自动循迹智能车
系统软件流程图
软件的开发工具和系统的调试
• 1.CodewarriorV4.7软件及其应用 • Codewarrior软件是Metrowerks公司开发的软件集 成开发环境及IDE(intergrated develop inviroment),Freescale的单片机都可以在 codewarior IDE软件下进行开发,codewarrior IDE 为软件开发提供了一系列的工具
智能车系统的分析
• 1.系统模型总体框图
• 2.系统控制电源模块分析
• 3.系统软件模块的分析
• 从该结构图中可以看出,系统的软件模块主要有: • 1. 单片机系统的初始化,包括单片机系统时钟的初始化、 ATD模块的初始化、PWM模块的初始化、增强型时钟模 块的初始化,还有一些输入输出口的初始化; • 2. 图像信号的采集:通过对图像信号波形的学习,根据图 像信号的特点,采集有效图像信号; • 3. 图像信号的处理:将采集到的信号存储在单片机中,通 过对图像信号的分析和判断来识别路径,判断黑线中间位 置,判断道路是直线还是曲线,以及通过计算判断出曲线 的斜率,从而进一步的控制舵机的转角和驱动电机的转速。 • 4. 舵机转角的控制和电机转速的控制:通过控制PWM口 的信号输出可以实现对舵机转角和轮速的控制
研究课题:基于图像传感器的自 动循迹智能车系统设置
指导老师: 学生: 专业:车辆工程
智能车概述
• 智能车是一种轮式移动机器人,它能够自主进行路径识别、 决策规划以选择最佳的行驶状态,智能车集中运用了自动 控制、传感器技术、汽车电子、电气、计算机、机械等多 个学科的知识。随着控制技术、计算机技术和信息技术的 发展,智能车在工业生产和日常生活中已扮演了非常重要 的角色。车辆智能化是汽车工业今后的发展趋势,也是人 们对安全性、智能化要求越来越高未来汽车的发展方向。 随着计算机技术和信息技术为代表的高新技术的发展,智 能车辆技术的研究将会有突破性的进展。智能车辆系统的 实用化是智能车辆发展的前进方向,适应性强、环境适应 性好的智能车辆将是研究的重点。
基于STM32单片机控制的多传感器集成的汽车无盲区导航仪
基于STM32单片机控制的多传感器集成的汽车无盲区导航仪作者:杨俊杰解鹏飞张芝玲李伟豪王宁冉春秋汪语哲来源:《智能计算机与应用》2018年第02期摘要:论文给出了一款汽车无盲区导航仪的设计和制作方案。
采用STM32单片机作为控制核心,通过OV7670摄像头、GPS定位模块、温湿度传感器、SD卡、TFT彩屏等外设元件实现了数据采集、存储和显示功能。
单片机通过串口接收位置信息,中断接收图像与温湿度数据,将数据存储到SD卡中,驱动TFT显示屏显示,用WiFi上传到监控中心,保障了该款无盲区导航仪在汽车行驶过程中的安全性与舒适性。
关键词: STM32单片机;传感器;汽车盲区:导航仪Abstract:The paper proposes a design and manufacturing plan of the integrated car navigation system without blind area using single chip microcomputer. In the research STM32 microcontroller is used as the control center OV7670 camera GPS positioning module temperature and humidity sensors,SD card,TFT color display are used as data acquisition data storage and display.Location information is obtained through the serial port by SMC images and temperature and humidity data are received through interrupt. Moreover Using TFT for display data is first stored to the SD card and then uploaded to the monitoring center with WiFi which could guarantee the safety and comfort of vehicle during the driving.Key words: STM32 microcontroller;sensor;car blind area;navigation machine引言随着家用汽车的推广普及,人们对于汽车驾驶过程中安全性能的要求也日趋突出。
基于某光电传感器自动循迹小车设计.doc

摘要制作自动寻迹小车所涉及的专业知识包括控制、模式识别、传感技术、汽车电子、电气、计算机、机械等诸多学科。
为了使小车能够快速稳定的行驶,设计制作了小车控制系统。
在整个小车控制系统中,如何准确地识别路径及实时地对智能车的速度和方向进行控制是整个控制系统的关键。
由于此小车能够自动寻迹,加速,减速.故又被称作为智能车.本智能车控制系统设计以MC9S12XS128微控制器为核心,通过两排光电传感器检测小车的位置和运动方向来获取轨道信息,根据轨道信息判断出相应的轨道类型,并分配不同的速度给硬件电路加以控制,完成了在变负荷条件下对速度的快速稳定调节。
红外对射传感器用于检测智能车的速度,以脉宽调制控制方式(PWM)控制电机和舵机以达到控制智能车的行驶速度和偏转方向。
软件是在CodeWarrior 5.0的环境下用C语言编写的,用PID控制算法调节驱动电机的转速和舵机的方向,完成对模型车运动速度和运动方向的闭环控制。
智能车能够准确迅速地识别特定的轨道,并沿着引导线以较高的速度稳定行驶。
整个智能车系统涉及车模机械结构的改装、传感器电路设计及控制算法等多个方面。
经过多次反复的测试,最终确定了现有的智能车模型和各项控制参数。
关键词:MC9S12XS128;PID;PWM;光电传感器;智能车ABSTRACTMaking automatic tracing car involved the professional knowledge including control, pattern recognition, sensing technology, automobile electronics, electrical, computer, machinery and so on many subjects. According to the technical requirements of the contest, we design the intelligent vehicle control system. In the entire control system of the smart car, how to accurately identify the road and real-time control the speed and direction of the Smart Car is the key to the whole control system.Because this car can automatic tracing, accelerate, slowing down. So it is also known as intelligent car this intelligent vehicle control system design take the MC9S12XS128 micro controller as a core, examines car's position and the heading through two row of photoelectric sensors gains the racecourse information, judges the corresponding racecourse type according to the racecourse information, and assigned the different speed to control for the hardware circuit, has completed in changes under the load condition to the speed fast stable adjustment. The infrared correlation sensor uses in examining the intelligent vehicle's speed, (PWM) controls the electrical machinery and the servo by the pulse-duration modulation control mode achieves the control intelligence vehicle's moving velocity and the deflection direction.The software is under the CodeWarrior 5.0 environment with the C language compilation, actuates electrical machinery's rotational speed and servo's direction with the PID control algorithm adjustment, completes to the model vehicle velocity of movement and the heading closed-loop control. The intelligent vehicle can distinguish the specific racecourse rapidly accurately, and along inlet line by the high speed control travel.The entire intelligent vehicle system involves the vehicle mold mechanism the re-equipping, the sensor circuit design and the control algorithm and so on many aspects. After the repeated test, has determined the existing intelligent vehicle model and each controlled variable finally many times.Keywords:MC9S12XS128; PID;PWM;photoelectric sensor; smart car目录第一章绪论 (1)1.1引言 (1)1.2本文设计方案概述 (1)1.2.1总体设计 (1)1.2.2传感器设计方案 (2)1.2.3控制算法设计方案 (4)第二章机械结构设计 (5)2.1前轮倾角的调整 (5)2.2齿轮传动机构调整 (5)2.3后轮差速机构调整 (6)2.4红外传感器的固定 (6)2.5小车重心的调整 (6)2.6齿轮啮合间隙的调整 (7)第三章硬件电路的设计 (8)3.1系统硬件概述 (8)3.2电源模块的设计 (9)3.2.1 LM2940供电电路 (10)3.2.2 LM2596供电电路 (11)3.3电机驱动模块 (12)3.3.1模块介绍 (12)3.3.2使用说明 (13)3.3.3电压电流测试结果 (14)3.4舵机控制模块 (15)3.5路径识别模块 (16)3.7单片机模块的设计 (18)3.8硬件电路部分总结 (18)第四章软件系统设计 (20)4.1智能车控制算法监测平台 (20)4.2主程序流程图 (20)4.3系统的模块化结构 (21)4.3.1时钟初始化 (21)4.3.2串口初始化 (22)4.3.3 PWM初始化 (23)4.4中断处理流程 (25)4.5小车控制算法 (25)4.5.1舵机控制 (26)4.5.2速度控制 (27)4.6坡道的处理 (29)4.7弯道策略分析 (29)第五章开发与调试 (31)5.1软件开发环境介绍 (31)5.2智能车整体调试 (34)5.2.1 舵机调试 (34)5.2.2 电机调试 (34)5.2.3 动静态调试 (34)第六章结论 (36)6.1智能车的主要技术参数说明 (36)6.2总结 (36)6.3不足与展望 (36)参考文献 (37)致 (38)附录1 (39)附录2 (47)附录3 (60)第一章绪论1.1引言思路及技术方案是一个工程项目的灵魂。
基于图像的智能循迹小车设计
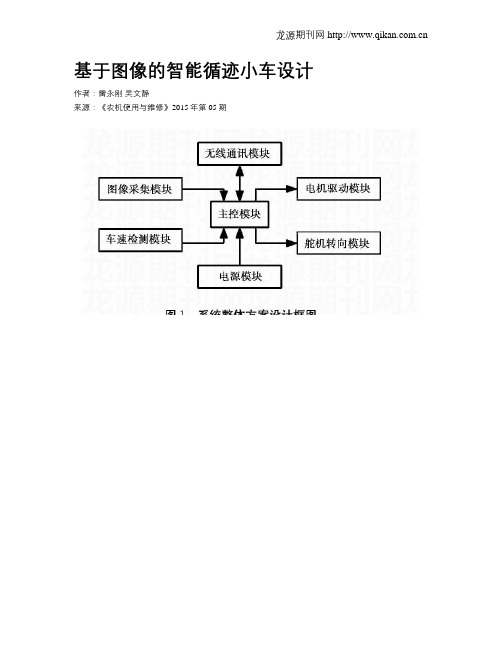
基于图像的智能循迹小车设计作者:雷永刚吴文静来源:《农机使用与维修》2015年第05期摘要设计一种智能循迹小车,采用Kinetis60单片机作为主处理器,利用OV7620摄像头获取轨迹图像信息,通过HSI双自适应阈值分割法处理轨迹图像,经游程编码技术得到轨迹的中心坐标信息,获取引导线。
然后利用获取的信息,结合增量式PID算法实现对舵机和电机的灵活控制,从而让智能小车循迹行驶。
关键词Kinetis60单片机HSI双自适应阈值分割法游程编码PID算法舵机Design of Intelligent Tracking Car Based on ImageLEI Yong-gang, WU Wen-jing(Zhongyuan University of Technology, Henan Zhengzhou 450007, China)ABSTRACT:An intelligent tracking car based on image was designed, and the main controller was Kinetis60 microcontroller. Tracking image information can be accessed by ov7620 camera, and tracking image can be processed by HSI dual adaptive threshold division method. The center coordinates of trajectory can be obtained by run-length coding technique, and then the guide line was figured out. The obtained information which was combined with the incremental PID algorithm can realize the flexible control of the steering gear and motor, so that intelligent tracking car is realized.Keywords: Kinetis60 microcontroller; HSI dual adaptive threshold division method; run-length coding; PID algorithm; Steering gear0引言智能小车是机器人大家庭中的一员,它是典型的机电一体化产品,智能循迹小车具有环境感知、自主决策、自动行驶等功能[1],汽车的高智能化是未来汽车领域发展的一个趋势,同时它的发展也渗入到社会的各个领域。
基于图像传感器的小车循迹控制

基于图像传感器的小车循迹控制常州工学院制作学生:杨义鹏,杨锟,高星宇指导老师:肖闽进,蔡纪鹤,马金祥一、设计方案工作原理1、摄像头图像识别的循迹小车设计背景当前,实用的图像处理系统都要求高速处理。
目前广泛采用软件进行处理,但软件处理存在速度、成本的问题。
近年来,随着现成可编程门阵列FPGA的发展,为提高图像处理系统的性能提供了新的思路和方法。
FPGA的并行特性所带来的高速性,以及低成本低功耗等特性,都是计算机无法比拟的。
摄像头循迹小车的FPGA以及PCB部分采用digilent公司Basys3 FPGA开发板作为控制核心,此款开发板采用xilinx 7系列芯片,板卡设计小巧,同时片上资源也足以满足大多教学应用场合。
2、预期实现目标定位设计并制作基于basys3的FPGA运用ov7725摄像头进行图像识别的循迹小车,能够拍摄画面并经行捕捉,在小车偏离赛道时进行控制使其能够完成循迹的目的。
3、技术方案分析比较方案1:采用带fifo的ov7670摄像头做二值化循迹图1-1带fifo的ov7670摄像头该摄像头自带fifo模块,是针对慢速的MCU能够实现图像采集控制推出的带有缓冲存储空间的一种模块,自带的fifo(先进先出)存储芯片使得处理图像拍摄数据存储时避免了SDRAM、DDR的使用,包含30w像素的图像感光芯片,操作和使用很方便,对读出的数据进行二值化处理,加上阈值后可以进行循迹使用。
方案2:采用带硬件二值化的ov7725摄像头做二值化循迹图1-2 带硬件二值化的ov7725摄像头此摄像头自带硬件二值化可以直接输出二值化后的0和1黑白图像,并且采样和输出速度要高于ov7670,在进行黑线循迹时优化二值化算法使得循迹变得简单。
方案3:采用ov7725摄像头进行图像捕捉此摄像头相对于ov7670的优点仍为高速的采样和输出速度,相对于带有硬件二值化摄像头丧失了二值化的优势但是可以摒弃二值化单纯只能循迹黑线的问题,进行图像识别而可以直接对物体进行图像捕捉,增加了使用的范围。
基于ov7670摄像头的视频采集和传输
安徽工程大学2016届本科
毕业设计(论文)选题审批表
学院名称:电气工程学院
课题名称
基于ov7670摄像头的视频采集和传输
课题类型
设计型
适用专业
电科
指导教师
张明艳
专业职务
讲师
核批学生数
1
课题完成形式
论文
本课题性质、主要内容及意义:
将前端采集的视频信息,通过以太网实时传回有权限的客户端进行解码播放和显示,实现远程监控。客户端向网络侧发送多媒体请求信号,前端收到请求包后,鉴权通过则将摄像头模块采集来的数据,封装成标准的以太网帧格式,经10M/100M自适应PHY芯片,通过以太网,发送至客户端显示在LCD液晶屏。项目包括:视频采集模块,数据缓存模块,客户端鉴权模块,以太网封包拆包模块,以太网收发模块,客户端请求模块。所用芯片:OV7670,cyclone4(FPGA开发板),DP83848,所用协议:i2c,uart,sccb,mdio,rmii,VGA.项目中负责信息采集和以太网收发模块。
专业审查意见:
专业负责人(签字):
年月日
学院审查意中“课题类型”是指设计型、实验研究型、论文型;
2、本表一式两份,一份交教务处实践教学科,一份学院留存。
基于OV7670机器人视觉图像采集模块的设计
1 总体设计1.1 设计要求集成度高。
在当前电子设备往薄、轻、小发展的趋势下,相对应的,图像采集装置也应该变得更薄、轻、小。
稳定性强。
工业设备,永远也不知道它所处的环境究竟有多恶劣。
所以,图像采集装置必须有很高的稳定性。
采集图像能力强。
一个好的图像采集装置,它的采集图像的能力一定很强。
不管它所处的环境如何,都能够无延时的进行任何图像数据的采集。
1.2 系统方案设计框图图1 系统框图基于OV7670机器人视觉图像采集模块的设计如图1所示,基于STM32单片机,通过软件编程设置OV7670摄像头内部参数采集图像,并将采集到的图像转换为数字信号存储在AL422B 里;随后STM32将存储在AL422B 内部的数字代码提取出来,再经过算法处理将数据显示在液晶显示屏TFT 上。
而SD 卡则是用来存储需要的已经在TFT 屏上显示的图像。
蜂鸣器用来提示图片已经被保存。
2 相关模块设计2.1 单片机STM32本次设计采用的单片机型号为STM32F103ZET6,具有最高72MHz 的工作频率,支持2.0~3.6伏供电。
低功耗的特点是选择它的理由之一。
它拥有灵活的12路通用DMA。
这12路DMA 可以管理存储器到存储器、设备到存储器和存储器到设备的数据传输。
2.2 摄像头OV7670OV7670图像传感器体积小,工作电压低,灵敏度高,兼容了单片VGA 摄像头的功能。
输出方式多,传输速度快。
应用独有的传感器技术,通过减少或消除光学或电子缺陷如固定图案噪声、托尾、浮散等,提高图像质量,得到清晰的稳定的彩色图像[1]。
2.3 AL422BAL422B 可以进行高速异步串行存取。
其读写时钟周期为20ns,读取时间为15ns,并且内部DRAM 可以自行刷新数据。
工作电压一般为3.3伏或5伏。
有SOP 封装的28引脚,其为标准引脚。
它的内部集成了一套控制系统。
寻址包括刷新都是由其完成的。
2.4 TFT 显示屏TFT 即薄膜场效应晶体管,它可以主动地对屏幕上的各个独基金项目:“基于OV7670机器人视觉图像采集系统的设计”(201710959059);“基于壁虎擦玻璃机器人技术的优化设计的研究”(201710959065);“基于两足步行机器人的研究”(201710959070)。
基于OV7670的网络图像传感器设计与实现
基于OV7670的网络图像传感器设计与实现作者:杜宝祯吴志荣曾佳来源:《中国科技纵横》2014年第21期【摘要】文章提出了一种基于OV7670的网络图像传感器节点软硬件平台的设计方案。
该方案构建了以Cortex-M3处理器STM32F103RBT6和uCosII 为核心嵌入式软硬件平台,通过OV7670模块实现图像数据采集。
针对网络传输问题,采用了基于IEEE802.11b/g标准的WIZ610wi无线网络模组,实现数据的远程传输。
【关键词】 STM32F103 图像传感器 OV7670 无线网络模组【Abstract】 A hardware and software?platform design scheme based on OV7670 image network sensor node was proposed. The program was built embedded hardware and software platform,using the Cortex-M3 processor STM32F103RBT6 as core,running the uCosII operating system, using OV7670 image sensor to capture image data.Meanwhile,the WIZ610wi wireless network module based on IEEE802.11b/g standard was adopted to facilitate the remote data transmission.【Key words】 STM32F103; Image Sensor;OV7670;Wireless network module1 引言近年来,随着工业级的网络化测控系统的不断发展,人们对生产检测和控制的要求不断提高,在自动化测量、安全监控、设备检测等工业测控领域,都需要有性能良好、成本低廉、可大面积布控的网络图像传感器用于现场图像数据采集的工作。
2-实验二基于ov7670摄像头模块的图像采集

将摄像头由RGB565配置成YUV格式。 2.初始化中断,使用摄像头的场中断(VSYNC)来读FIFO。 如图,本例程中配置GPIOA的PA0引脚出发中断。在stm32f10x_it.c文件中有中断处理函数EXTI0_IRQHandler(void)。 每一个图像处理周期中需要两次场中断,第一次场中断完成FIFO的复位,是摄像头开始 采集数据并存在FIFO中,第二个场中断来临的时候,读取FIFO。 第一个:
方便使用和参考!
10.如果想真正实现图像的采集并且能够处理图像数据该如何做? 答:按下面几个方案选择:
(1)如果想用8 位实现采集和处理,基本不现实,简单处理的话,
用带FIFO 的摄像头;
(2)32 位的高速芯片可以,有些直接有图像传感器接口,有些必须
寻找一些办法,如基于stm32f103的DMput窗口出现如下输出,表示编译成功。
6.2 控制板的电气连接 下载程序,上电之前,需要做一下连接: ●控制板和电池 ●控制板和摄像头(注意引脚对应) ●控制板和pc通过串口相连 6.3使用Flash Loader下载编译好的可执行二进制文件 下载方法参见实验一6.3节。 这里下载的是\测试例程及固件\2‐基于ov7670摄像头模块的图像采集程序\RVMDK\Obj 文件夹中的OV7670.hex。 6.4使用上位机软件查看图像(在“软件和驱动”文件夹中) 第一步:波特率选择9600 第二步:选择对应串口(我这里是COM1) 第三部:点击第一个按钮,打开串口 第四步:点击“黑白图像”进入一下界面
3. 预备知识 ●使用MDK4.14集成开发环境,编译和调试程序的基本过程。 ● STM32应用程序的框架结构。 ●摄像头行中断,场中断的基本概念。 ● FIFO的读写时序。 ●了解STM32中断的配置和使用方法。学会开中断,关中断的方法。 4. 实验设备及工具 ●硬件:博创智能车套件,PC机,USB转TTL串口线 ●软件:MDK4.14集成开发环境,USB转串口线驱动 ,摄像头图像采集上位机 5. 实验原理及说明 5.1 OV7670带FIFO模块原理与说明 1.简介: OV7670 带FIFO 模块,是针对慢速的MCU 能够实现图像采集控制推出的带有缓冲存储空间的一种模块。这种模块增加了一个FIFO(先进先出)存 储芯片,同样包含30w 像素的CMOS 图像感光芯片,3.6mm 焦距的镜头和镜头座,板载CMOS 芯片所需要的各种不同电源(电源要求详见芯片的 数据文件),板子同时引出控制管脚和数据管脚,方便操作和使用。
stm32和ov7670图像采集串口上位机显示
花了几天时间用stm32和ov7670搞了个图像采集,这比我预想的要难很多。
ov7670一百多个寄存器而且ov公司的datasheet简陋得常常让我想说一句:我去年买了个表。
后来还是借鉴了网络上的一些寄存器配置,在加上苦读ov推出的资料终于还是搞出了个简陋的摸样出来。
话不多说了,给大家分享一下心得体会,以便帮助后面学习的朋友少走些弯路。
一:摄像头不比其他的传感器,有一定的难度,而且资料太过简陋,后面学习的朋友尽量买些成熟产品做开发,比如说淘宝买的开发套件。
我就吃了这亏,stm32和摄像头完全从零做起,啥都没有,连上位机都准备自己写,这没必要时间成本太高了。
二:不要指望自己一个一个寄存器去配置,本来资料就简陋,有很多寄存器你看了资料未必能明白啥个意思,在网上找个配置方案(也可以借用我的配置方案)修改一些关键地方就行了。
三:注意焦距的调节,如果焦距调节不正确,可能画面模糊一片,慢慢调节一下焦距图像画面应该就出来了(前提是你已经采集到了图像)四:注意SCCB(也就是I2C)的时序,可以借鉴我的初始化,但配置完成后用串口读取一些寄存器的值打印出来,看是否配置成功,如果这个都没有配置成功,你先别浪费时间找图像了。
五:网上能下载到的上位机,一般都会显示255的灰度图像,而ov7670是不能够输出灰度图像的,所以只能将输出格式配置成为YUV,然后人为去掉UV,将Y传给上位机显示就是灰度图像了。
(注意网上下载的上位机软件可能会有一些协议,最好先弄清楚,要不然你显示肯定是显示不出来的)六:分辨率配置(具体配置参考代码)主要有一下几个寄存器0x 17 HSTART0x 18 HSTOP0x 19 VSTRT0x 1A VSTOP0x 03 VREFHREF 的高电平宽度等于我们所要显示的一行HREF = WEIGHT*2; 乘以二是因为每个像素点是有两个HSTOP=START + HREF;184 + 320*2 = 824; 然后在用824对784求余就是HSTOP的值(其原因,请仔细度ov7670的时序,如果懒得看,直接用就行)七:配置为YUV格式关键寄存器配置:(引用于网络论坛,感谢他的分享){0x12, 0x10},//QVGA YUV{0x3a, 0x14},//使用固定UV输出{0x3d, 0x80},//使用固定UV输出{0x67, 0x11},//固定U值,0x11,方便测试{0x68, 0xFF},//固定V值,0xFF,方便测试{0x40, 0xC0},//初始配置,YUV模式,这个寄存器必须设置,否则不好使为方便调试,都是用固定的U值和V值,向67中写入11,向68中写入FF,出来的是XX11XXFF,说明配置成功。
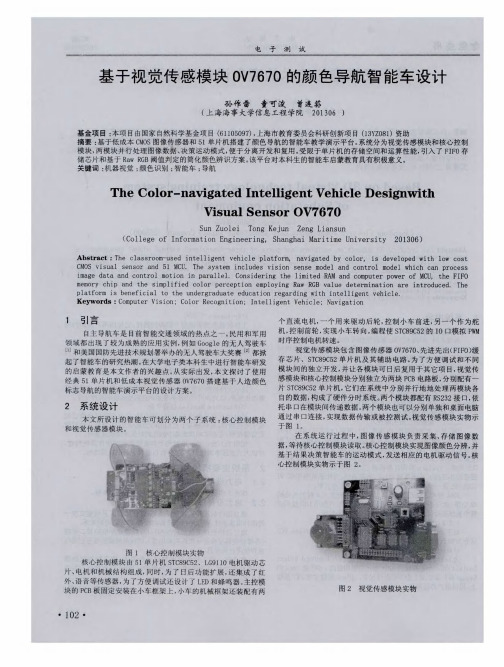
基于视觉传感模块OV7670的颜色导航智能车设计
3 硬 件 设 计
E 电 L E C T 子 R 0 N I 测 C T E 试 S T
2 0 第 1 3 年 5 期 3 月
置的钳位 二极管能释放感性负载 的反 向冲击 电流 , 使它在驱动继 电器 、 直流 电机 、 步进 电机或开关功率管 的使用上安全可靠 。 核心 3 . 1 视觉传感模块 控制 模块的硬件连接示于 图 4 。 两片 L G 9 1 1 0分别与 S T C 8 9 C 5 2的 目前, 电子设计中广泛使用 的视觉传感器有 C C D和 C M O S两 两组 1 0口相连 , 并依次连接 了前轮舵机和后轮驱动 电机 , 以控制 种。 前者有较好的成像通透性 、 明锐度 、 色彩还原性 , 但成本较高 ; 小车依据 颜色 辨识决策运动模式 。 后者通透性一般 , 对实物 的色彩还 原能力偏 弱, 曝光度欠佳 , 但通 过影像光源 自动增 益补 强等技术 , 可达 与 C C D 视 觉传 感器相当 的 性能 , 其 优势是成本低、 耗 电量小。 为提 高智 能车 系统 的电池续航 性能 , 本 系统采用的 C M O S视 觉传 感器 0 V 7 6 7 0 。 0 V 7 6 7 0 支持 0 m n i V i S i o n公司 定制 的串行摄像 头控制 总线 ( S C C B ) 协议 , 该协议用于读写 O V 7 6 7 0寄存器 ,以定制 图像质量 、 数据 格式 和传输 方式 , 所 有 图像 处理 功 能, 包 括伽 玛 曲线 、 白平 衡、 饱和度 、 色 度等 都可 以通过 S C C B接 口编程 使能 。 类似 于 I 2 C 总线 , 两 线制 S C C B是一种双 向二线制同步 串行总线 。 在不做像素 分频处 理 时, O V 7 6 7 0的图像输 出为 6 4 0 x 3 2 0 像 素, 最高支 持 3 O帧 /秒 。 为方 便 实际教 学, 降低 学生入 门成 本, 本平 台使用 支持 5 1 指令集 的 S T C 8 9 C 5 2单片机 , 但其程 序存储 空间和频 率远远无 法 图 4 核心控制模块硬件连接 图 满 足直接 读取 O V 7 6 7 0的需求 , 为了解决 开发便利和 性能需求 间 的矛盾 , 本 文采用先 进先 出( F I F O ) 芯片 A L 4 2 2 B作 为摄 像头与 单 4 软 件 设 计 片机 间数据传 输 的媒介 。A L 4 2 2 B有 8条数据 输入线和 8条数 据 系 统软件 实现 了视觉传感模 块 的时钟信 号、 读 写信号 的时 输 出线 , 可 以在 每个时钟 周期输入 或输 出一个 字节 的数 据。 其 存 序模拟 , 以及 核心控 制模块 的数据 处理 、 运动决策 及 电机驱 动指 储 空 间为 3 M b 。 若设置 0 V 7 6 7 0每像素 占一个字节 , 则采集 到的完 令 的生成和下发 。 整 图像大小为 3 0 7 , 2 0 0 X 8 b i t s 。A L 4 2 2 B满足存储需求 。 4 . 1 操 控 0 V 7 6 7 0 视 觉传 感模块 的硬 件连 接示 于 图 3 。 基于 晶振 , 视 觉传 感 算法流程示于图 5 。0 V 7 6 7 0有 2 5 6个 配 置 寄 存器 , 地 址 器 0 V 7 6 7 0会 产 生像素 时钟 P L C K , 像 素 时钟每跳 变一 次 , 对应 输 为0 x 0 0~ 0 x F F , 从 地址 c 9之后 为保 留寄存 器 。 首先 , 通 过模拟 出一字节 的 图像数据 , 通过 0 V 7 6 7 0的数 据输 出总线 D O 0~ 7 来 S C C B时序 来配置 0 V 7 6 7 0初始化 。 每 个寄存器 的详 细功能参 见文 输 出图像数据 , 实际图像中的每个像素点所对应 的存储空 间大 小 献 。 然后, 依靠 P L C K与 W C K时钟 的 同步 ,0 V 7 6 7 0采集 的 图像 可 通 过设 置 O V 7 6 7 0的配 置 寄存 器调 整 。 如 配置 0 V 7 6 7 0输 出 的 数据 会 自动 写入 F I F O缓 冲 A L 4 2 2 B中 ; 再者 , 重置 F I F O的读 写 个 像素 占一 个字节 , 那么 P L C K每跳变一次 ,0 V 7 6 7 0输 出一个 信号 ; 最后 , 天线传感模 块 中的单片机 读 F I F O中的图像 数据 , 并 像 素点 的图像 数据 。 依靠硬件 管脚 相连 ,F I F 0缓存 A L 4 2 2 B的写 通过 串口发送 。 伪 代码示于代码 1 。 时钟 W C K也 相应 地跳 变一 次, 一 字节 图像 数据通 过 数据输 入 口
一种基于OV7670视觉系统的类人机器人设计
一种基于OV7670视觉系统的类人机器人设计作者:王小龙黄志强张诗瑶李林张旺来源:《科技创新与应用》2017年第17期摘要:为解决类人机器人双机械臂抓取目标过程中,存在目标识别不准确、目标识别单一、双机械臂运动不协调等问题,文章设计了一款基于OV7670彩色摄像机视觉系统及高仿真机械臂的类人机器人。
通过OV7670和STM32主控模块对图像信息进行采集与处理,使用RGB-SHL颜色空间转换模型提取目标对象的图像特征,产生控制指令,然后将协调控制每一个舵机的运动参数发送给舵机驱动模块,以实现类人机器人识别目标、定位目标、协调运动和精确控制等功能。
通过实验验证和参加华北五省(市、自治区)大学生机器人大赛,表明该机器人具有对目标识别准确、协调运动精确可靠的优点。
关键词:类人机器人;识别定位;RGB-SHL颜色空间;彩色摄像机引言类人机器人利用传感器获取信息从而控制机器人的动作[1]。
目前,简易类人机器人主要是利用红外、超声波、线性CCD等传感器作为识别系统,以完成寻迹、避障、抓取等功能。
例如,部分DARwIn系列类人机器人采用红外传感器,此类机器人的识别模式较为单一:红外、超声波只能对物体进行探测且多用于寻迹和避障;线性CCD通过灰度值来检测目标,但是受环境的光照因素影响较大,且图像采集的范围极其有限,不利于机器人在未知环境中感知与行动。
本文将介绍一种基于OV7670彩色摄像机视觉系统的类人机器人,该机器人可对目标的颜色、形状进行识别,并可对图像信息进行二次开发,建立以机器人为原点的坐标系,从而得到目标的距离、位置、形状等信息,实现寻迹、避障、抓取等功能。
1 系统总体设计该设计从底层硬件设计入手:搭建经典的简易类人机器人平台;将其与自主设计的仿人机械手臂融合;在机器人的头部安装OV7670彩色摄像机,用舵机控制其转动;在机器人胸部安装STM32F103ZET6主控板,从而完成硬件设计。
进一步是上层的软件设计:以STM32F103ZET6主控板为平台,RGB-SHL颜色空间转换公式为核心,通过对摄像机采集的图像信息进行处理,得出目标的坐标信息,产生控制指令,向舵机驱动模块发送相应的舵机控制参数,以控制机器人协调运动和精确操作。
一种基于OV7670视觉系统的类人机器人设计
引言类人机器人利用传感器获取信息从而控制机器人的动作[1]。
目前,简易类人机器人主要是利用红外、超声波、线性CCD等传感器作为识别系统,以完成寻迹、避障、抓取等功能。
例如,部分DARwIn系列类人机器人采用红外传感器,此类机器人的识别模式较为单一:红外、超声波只能对物体进行探测且多用于寻迹和避障;线性CCD通过灰度值来检测目标,但是受环境的光照因素影响较大,且图像采集的范围极其有限,不利于机器人在未知环境中感知与行动。
本文将介绍一种基于OV7670彩色摄像机视觉系统的类人机器人,该机器人可对目标的颜色、形状进行识别,并可对图像信息进行二次开发,建立以机器人为原点的坐标系,从而得到目标的距离、位置、形状等信息,实现寻迹、避障、抓取等功能。
1系统总体设计该设计从底层硬件设计入手:搭建经典的简易类人机器人平台;将其与自主设计的仿人机械手臂融合;在机器人的头部安装OV7670彩色摄像机,用舵机控制其转动;在机器人胸部安装STM32F103ZET6主控板,从而完成硬件设计。
进一步是上层的软件设计:以STM32F103ZET6主控板为平台,RGB-SHL颜色空间转换公式为核心,通过对摄像机采集的图像信息进行处理,得出目标的坐标信息,产生控制指令,向舵机驱动模块发送相应的舵机控制参数,以控制机器人协调运动和精确操作。
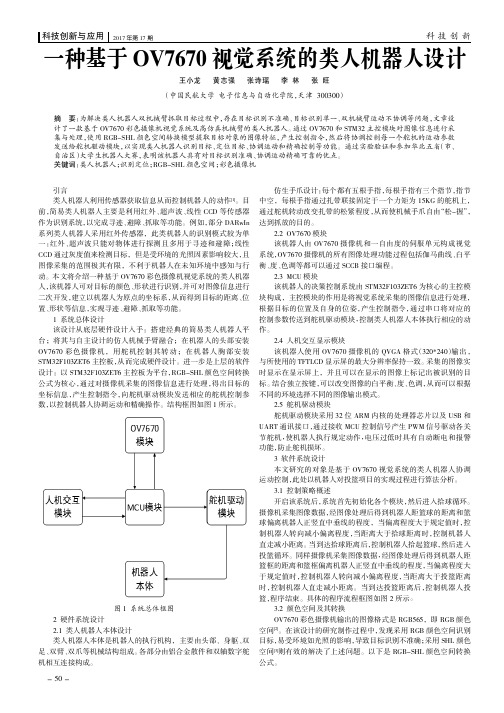
结构框图如图1所示。
图1系统总体框图2硬件系统设计2.1类人机器人本体设计类人机器人本体是机器人的执行机构,主要由头部、身躯、双足、双臂、双爪等机械结构组成。
各部分由铝合金散件和双轴数字舵机相互连接构成。
仿生手爪设计:每个都有五根手指,每根手指有三个指节,指节中空,每根手指通过扎带联接固定于一个力矩为15KG的舵机上,通过舵机转动改变扎带的松紧程度,从而使机械手爪自由“松-握”,达到抓放的目的。
2.2OV7670模块该机器人由OV7670摄像机和一自由度的伺服单元构成视觉系统,OV7670摄像机的所有图像处理功能过程包括伽马曲线、白平衡、度、色调等都可以通过SCCB接口编程。
ov7670寄存器配置调试总结
废话后面说,先直接上OV7670寄存器的配置部分const uint8_t OV7670_Reg[][2]={//Frame Rate Adjustment for 24Mhz input clock//30fps PCLK=24MHz{0x11, 0x80},//软件应用手册上设置的是0x80,例程设置的是0x00{0x6b, 0x0a},//PLL控制,软件应用手册上设置的是0x0a,例程设置的是0x40,将PLL调高的话就会产生花屏{0x2a, 0x00},{0x2b, 0x00},{0x92, 0x00},{0x93, 0x00},{0x3b, 0x0a},//Output format{0x12, 0x14},//QVGA(320*240)、RGB//RGB555/565 option(must set COM7[2] = 1 and COM7[0] = 0){0x40, 0x10},//RGB565,effective only when RGB444[1] is low{0x8c, 0x00},//Special effects - 特效//normal{0x3a, 0x04},{0x67, 0xc0},{0x68, 0x80},//Mirror/VFlip Enable - 水平镜像/竖直翻转使能{0x1e, 0x37},//修改配置值将产生图像显示上下或左右颠倒//Banding Filter Setting for 24Mhz Input Clock - 条纹滤波器//30fps for 60Hz light frequency//{0x13, 0xe7},//banding filer enable//{0x9d, 0x98},//50Hz banding filer//{0x9e, 0x7f},//60Hz banding filer//{0xa5, 0x02},//3 step for 50Hz//{0xab, 0x03},//4 step for 60Hz//{0x3b, 0x02},//select 60Hz banding filer//Simple White Balance - 白平衡//{0x13, 0xe7},//AWB、AGC、AGC Enable and ...//{0x6f, 0x9f},//simple AWB//AWBC - 自动白平衡控制(Automatic white balance control)//{0x43, 0x14},//用户手册里这些寄存器的值都是保留(Reserved),不用设置的呀?//{0x44, 0xf0},//{0x45, 0x34},//{0x46, 0x58},//{0x47, 0x28},//{0x48, 0x3a},//AWB Control//{0x59, 0x88},//用户手册连寄存器都是保留,初始值都没提供//{0x5a, 0x88},//{0x5b, 0x44},//{0x5c, 0x67},//{0x5d, 0x49},//{0x5e, 0x0e},//AWB Control//{0x6c, 0x0a},//{0x6d, 0x55},//{0x6e, 0x11},//{0x6f, 0x9f},//AGC/AEC - Automatic Gain Control自动增益补偿/Automatic exposure Control自动曝光控制//{0x00, 0x00},//{0x14, 0x20},//{0x24, 0x75},//{0x25, 0x63},//{0x26, 0xA5},//AEC algorithm selection - AEC公式选择//{0xaa, 0x94},//基于平均值的AEC算法Average-based AEC algorithm/基于直方图的AEC算法Histogram-based AEC algorithm//基于直方图的AGC/AEC的控制//{0x9f, 0x78},//{0xa0, 0x68},//{0xa6, 0xdf},//{0xa7, 0xdf},//{0xa8, 0xf0},//{0xa9, 0x90},//Fix Gain Control - 固定增益控制//{0x69, 0x5d},//Fix gain for Gr channel/for Gb channel/for R channel/for B channel//Color saturation 颜色饱和度+ 0//{0x4f, 0x80},//{0x50, 0x80},//{0x51, 0x00},//{0x52, 0x22},//{0x53, 0x5e},//{0x54, 0x80},//{0x58, 0x9e},//Brightness - 亮度+ 0//{0x55, 0x00},//Contrast - 对比度+ 0//{0x56, 0x40},//Gamma Curve - 伽马曲线//{0x7a, 0x20},//{0x7b, 0x1c},//{0x7c, 0x28},//{0x7d, 0x3c},//{0x7e, 0x55},//{0x7f, 0x68},//{0x80, 0x76},//{0x81, 0x80},//{0x82, 0x88},//{0x83, 0x8f},//{0x84, 0x96},//{0x85, 0xa3},//{0x86, 0xaf},//{0x87, 0xc4},//{0x88, 0xd7},//{0x89, 0xe8},//Matrix Coefficient - 色彩矩阵系数//{0x4f, 0x80},//{0x50, 0x80},//{0x51, 0x00},//{0x52, 0x22},//{0x53, 0x5e},//{0x54, 0x80},//Lens Correction Option - 镜头补偿选项 //{0x62, 0x00},//{0x63, 0x00},//{0x64, 0x04},//{0x65, 0x20},//{0x66, 0x05},//{0x94, 0x04},//effective only when LCC5[2] is high//{0x95, 0x08},//effective only when LCC5[2] is high//注释这些配置的话,就倾斜显示,并显示多块,这到底是控制什么的?跟时序图有关?{0x17, 0x16},//行频Horizontal Frame开始高八位(低三位在HREF[2:0]){0x18, 0x04},//行频Horizontal Frame结束高八位(低三位在HREF[5:3]){0x19, 0x02},//场频Vertical Frame开始高八位(低二位在VREF[1:0]){0x1a, 0x7b},//场频Vertical Frame结束高八位(低二位在VREF[3:2]){0x32, 0x80},//HREF{0x03, 0x06},//VREF//注释这个配置的话,就显示花屏了{0x15, 0x02},//配置PCLK、HREF、VSYNC相关//Automatic black Level Compensation - 自动黑电平校正{0xb0, 0x84},//调试时注释这项配置时,颜色显示不正常了,红色练绿色,绿色变红色,但用户手册对这寄存器是保留RSVD//{0xb1, 0x0c},//{0xb2, 0x0e},//{0xb3, 0x82},//{0xb8, 0x0a},//SCALING_xx寄存器//{0x70, 0x00},//{0x71, 0x00},//{0x72, 0x11},//{0x73, 0x08},//{0x3e, 0x00},//ADC//{0x37, 0x1d},//ADC控制ADC Control//{0x38, 0x71},//ADC和模拟共模控制ADC and Analog Common Mode Control//{0x39, 0x2a},//ADC偏移控制ADC Offset Control//零杂的寄存器//{0x92, 0x00},//空行低八位Dummy Line low 8 bits//{0xa2, 0x02},//像素时钟延时//{0x0c, 0x0c},//{0x10, 0x00},//{0x0d, 0x01},//{0x0f, 0x4b},//{0x3c, 0x78},//{0x74, 0x19},//用户手册里这几个寄存器都是保留RSVD//{0x0e, 0x61},//{0x16, 0x02},//{0x21, 0x02},//{0x22, 0x91},//{0x29, 0x07},//{0x33, 0x0b},//{0x35, 0x0b},//{0x4d, 0x40},//{0x4e, 0x20},//{0x8d, 0x4f},//{0x8e, 0x00},//{0x8f, 0x00},//{0x90, 0x00},//{0x91, 0x00},//{0x96, 0x00},//{0x9a, 0x80},};刚开始学OV7670摄像头,我想大家跟我一样心里很毛躁吧,一个模块需要你配置100多个寄存器,但用户手册对寄存器的介绍却草草的一笔带过,自己无从下手啊,只能看开发板给的例程和上网找一些大虾的帖子了。
_修改版_基于OV7670的图像采集及显示系统设计
基于OV7670的图像采集及显示系统设计摘要:介绍了一种采用OV7670图像传感器采集图像数据,并以Altera的NIOSII软核处理器作为主控制器的系统设计。
此设计实现了高速的图像数据采集,并可将图像数据通过2.8寸的TFT液晶显示屏实时显示出来。
关键词:图像传感器;SCCB总线;NIOSII;图像数据;TFTLCD中图分类号:TP273 文献标识号:A1、系统设计本系统采用的FPGA为Altera的Cyclone II系列的EP2C8Q208,具有8256个LEs,36个M4K RAM blocks (4Kbits plus 512 parity bits),同时具有165,888bit的RAM,支持18个Embedded multipliers和2个PLL,资源配备十分丰富。
在它里面配置了NIOSII软核处理器,工作时钟频率可达到100MHz以上,并能稳定运行。
图像数据的采集控制以及TFT 液晶图像显示控制都是由FPGA完成,为获取高质量的图像数据及显示提供可靠保障。
2、图像数据采集2.1 SCCB总线图2 SCCB时序图SCCB总线的驱动程序由NIOSII软核来模拟SCCB时序完成。
先在SOPC Builder中配置两个IO口模块,一个设置为输出口SIO_C,另一个做为双向口SIO_D,如图3所示。
然后在Nios II IDE 软件中用C语言根据SCCB协议编写驱动程序。
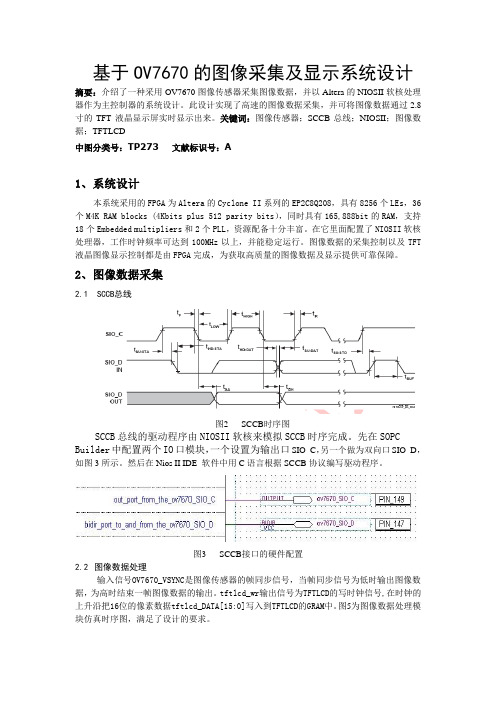
图3 SCCB接口的硬件配置2.2图像数据处理输入信号OV7670_VSYNC是图像传感器的帧同步信号,当帧同步信号为低时输出图像数据,为高时结束一帧图像数据的输出。
tftlcd_wr输出信号为TFTLCD的写时钟信号,在时钟的上升沿把16位的像素数据tftlcd_DATA[15:0]写入到TFTLCD的GRAM中。
图5为图像数据处理模块仿真时序图,满足了设计的要求。
图5 OV7670图像数据处理模块仿真时序图3、图像数据的显示由图像传感器输出的图像数据经过处理后传送到TFTLCD显示。
基于STM32和OV7670的图像采集与显示系统设计

基于STM32和OV7670的图像采集与显示系统设计李慧敏;樊记明;杨笑【摘要】针对传统图像采集与显示方案存在成本高、便携性差等问题,设计了一种基于STM32和OV7670的图像采集与显示系统.以STM32F103ZET6微控制器为主控单元,采用串行摄像机控制总线(SCCB)控制OV7670图像传感器输出RGB565,QVGA的图像数据,同时实时显示在TFT LCD上,并将图像以BMP格式保存在SD卡中.实验结果表明:得到的图像清晰流畅,且该系统具有低成本、低功耗、小体积等优点,可满足图像处理与识别的需要.【期刊名称】《传感器与微系统》【年(卷),期】2016(035)009【总页数】4页(P114-117)【关键词】STM32;OV7670;图像采集与显示;图像处理【作者】李慧敏;樊记明;杨笑【作者单位】东华大学机械工程学院,上海201620;东华大学机械工程学院,上海201620;东华大学机械工程学院,上海201620【正文语种】中文【中图分类】TP752.1图像处理技术经过几十年的发展逐渐成熟,已广泛应用于航空航天、生物医学工程、通信工程、工业检测、军事公安等领域[1]。
而图像采集是图像处理的前提,原始图像的质量直接影响到图像处理最终的结果。
以往的图像采集与处理多是由图像采集卡完成图像采集后再由计算机对其进行处理,这种方法虽然具有处理速度快的优点,但存在着价格昂贵、功耗高、体积大等不足[2]。
随着微电子技术的发展和集成电路集成度及工艺的提高,基于嵌入式系统的图像采集处理平台的开发日益增多,它具有成本低廉、结构紧凑、功耗低的优点。
STM32F103为ST公司生产的基于ARM Cortex—M3内核的32位微控制器,主频可达72 MHz,具有高性能、低功耗、低成本、稳定等诸多优点[3,4]。
OV7670是OmniVision公司生产的一款1/6寸、有效像素30万的互补金属氧化物半导体(CMOS)图像传感器,它通过美国OmniVision公司定制的2线/3线制串行摄像头控制总线(serial camera control bus,SCCB)进行控制,输出并行的8位图像数据,VGA图像输出最高可达30帧/s[5]。
基于视觉传感器的自主循迹智能车的设计与实现

收稿日期:2010-06-04基金项目:西安交通大学国家级大学生创新性实验计划项目(081069822)作者简介:王建(1987),男,江苏南通人,毕业于西安交通大学自动化专业,工学学士,现为硕士研究生,研究方向为模式识别与智能系统。
基于视觉传感器的自主循迹智能车的设计与实现王 建1,张晓炜2a,杨 锦2b,昝 鑫2c,刘小勇2c(1.中国科学技术大学自动化系,合肥230027;2.西安交通大学a .人工智能与机器人研究所;b.金禾经济研究中心;c .电子与信息工程学院,西安710049)摘要:介绍了一种基于视觉传感器的智能车控制系统。
首先对系统硬件设计方案进行介绍,然后介绍了其软件设计,包括图像预处理、畸变校正以及小车控制策略,分为巡线控制和路径规划,其中巡线控制使用最优曲率算法,最后介绍了基于SD 卡的调试手段。
实验结果表明,该小车能在白底黑线的跑道上稳定快速地行驶,其均速可达3.3m /s 。
关键词:智能车;视觉传感器;畸变校正;巡线控制;路径规划中图分类号:TP273 文献标志码:A 文章编号:1000-0682(2010)06-0034-04D esign and i m ple m entation of a self-tracking s m art car based on vis ual sensorWANG Ji an 1,ZHANG X iaow e i 2a ,YANG J i n 2b ,ZAN X i n 2c ,L I U X i aoyong 2c(1.D e part m ent o f Au t o m a ti on,Un i v e rsit y of Science and Technol ogy of China,H e fei 230027,Ch i na;2a.In stitu t e of Ar ti fici a l Intelli gence and R obots ;b .Jinh e Center for E cono m ic R esearc h;c .S c hool of E le c t ron i c and Informa tion Eng i neeri ng,X i an Jiaotong Un i ve rsit y,X i an 710049,C hina )Abstract :This paper describes a con tro l syste m o f a v ision sensor-based s m art car .Firs,t the hardw are design o f the syste m is described ,and then it i n troduces its so ft w are design,incl u di n g i m age prepr ocessi n g ,d istortion correction ,and car contro l strategy wh ich is d i v i d ed into line-tracking contro l and path plann i n g ,and t h e opti m al curvature a l g orithm is used i n the li n e-tracki n g contro,l fina ll y in troduced the debugg i n g too ls -SD card on li n e store .Experi m enta l results sho w t h at the car can ran steady and rap i d on the r unw ay ,the average rate up to 3.3m /s .K ey w ords :s m art car ;visua l sensor ;d istortion correction;li n e-track i n g con tro;l path plann i n g0 引言该文的背景是第四届全国大学生 飞思卡尔!杯智能车比赛。
智能车跟随系统开发

智能车跟随系统开发卫玉梁;靳伍银【摘要】An intelligent tracking-vehicle control system based on STM32 is developed to achieve quick identification and accurate tracking of specific target in real-time. Acquire image information of target using OV7670 after graying,de-noising and reverse processing the image,obtain target coordinates by the centroid sub-pixel positioning technology to provide direction navigation for intelligent vehicle,and picture of target can be sent to host computer during tracking process. The experimental result shows that the system has a good tracking effect and can achieve real-time accurate and tracking of target.%开发了一种基于STM32视觉导航的目标跟随小车智能控制系统,实现了对特定目标物体的快速识别与实时准确跟随.使用OV7670图像传感器采集目标物图像信息,对图像进行灰度化、降噪、取反等处理后,通过亚像元定位技术的质心法获取目标物坐标位置,为智能车提供方向导航,跟随过程中的画面实时发送至上位机.结果表明:小车在直行和转向跟踪实验中表现良好,跟随系统具有良好的跟踪效果,可实现对目标物的实时准确跟随.【期刊名称】《传感器与微系统》【年(卷),期】2017(036)008【总页数】4页(P75-77,81)【关键词】STM32;质心法;目标识别与跟踪;智能车【作者】卫玉梁;靳伍银【作者单位】兰州理工大学机电工程学院,甘肃兰州730050;兰州理工大学机电工程学院,甘肃兰州730050【正文语种】中文【中图分类】TP249随着汽车产业的快速发展,智能车的相关技术不断创新,其中包括目标跟踪等技术[1]。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
·104·电 子 测 试
2.3 电力设备构建3D 模型
通过3D MAX 技术,对变电设备进行数据集成、部件装配、数据关联,根据生产实际,将部件组建成装置,三维模型与设备台帐进行接口,并将计算结果返回三维模型,抽取变电设备组建图。
2.4 电力设备3D 模型修正
基于3D 技术开发的三维数字部件模型,基于Oracle 9i 的数据库模型,在统一的模拟平台上,将两个模型无缝的叠加在一起,实现了虚拟现实与真实现实的集成。
2.5 构建电力设备3D 模拟培训平台
以电力设备3D 模型搭建模拟培训数学建模,构建模拟培训平台。
利用视觉控制全方位展示变电二次设备及插件,对变电设备进行数据集成、部件装配、数据关联,将部件组建成装置并抽取变电设备组建图,综合变电二次异常和故障信息、运行状态和状态评价等数据为状态检修提供共享信息。
3 技术指标和功能要求
3.1 技术指标
(1)以JAVA 和JME 三维渲染引擎为核心,构建变电二次设备虚拟运维培训一体化的Eclipse RCP 培训平台;(2)建立变电二次设备和插件的3D 模型,构建以变电二次设备插件为最小可视单元的变电二次设备3D 培训平台;(3)利用统一的部件标准、项目分层结构、部件资料交换格式和标准接口、工程数据库建立设备构建器,构建3D 虚拟运维培训平台,实现生产资源的共享;
(4)利用视觉控制全方位展示变电二次设备及插件,对变电设备进行数据集成、部件装配、数据关联,将部件组建成装置并抽取变电设备组建图,实现与状态检修的关联。
3.2 功能要求(1)以3D 技术、Oracle 9i 数据库、JAVA 程序语言、GEF
二维渲染引擎、JME 三维渲染引擎为核心,构建变电二次设备3D 虚拟运维培训一体化的Eclipse RCP 组装培训平台;(2)将3D 技术应用到变电二次设备管理领域,采集变电二次设备及插件不同角度照片,以3D 技术构建变电二次设备及插件3D 模型,构建以变电二次设备插件为最小可视单元的3D 变电二次设备培训平台;(3)建立统一的部件标准和项目分层结构,建立部件资料交换格式和内容的标准接口,建立统一的工程数据库和项目数据库,实现生产资源的共享;(4)以3D 技术实现变电设备及部件三维立体空间虚拟视觉管理,以全新立体影像建模对变电设备进行数据集成、部件装配、数据关联,将部件组建成装置并抽取变电设备组建图,综合变电二次异常和故障信息、运行状态和状态评价等数据,使检修、运行和试验人员快速掌握变电设备的构造和性能。
(5)采用网络训练平台的全员大集中培训和利用单机训练平台自我培训,在虚拟的三维空间完成变电设备拆卸和组装培训,可快速提高一线员工的业务技术水平和异常处置能力,为培养复合型检修人员创出一条全新的培训模式。
4 结束语变电设备3D 运检虚拟培训平台建立设备三维仿真模型,然后通过信息关联技术将三维可视化实体模型与设备数字化信息关联起来,将视听合一功能与计算机的交互功能结合在一起,产生出一种更合乎自然的交流环境和方式,直接诉诸培训对象的多种感官,调动培训对象主动运用多种感官积极参与媒体的活动,使对知识的被动接受转变为知识的主动发现、探索。
参考文献[1] 蔡伟,李龙华. 水电站机电设备运行检修3D 仿真培训界
面设计.2011
[2] 钱玉春,袁敬忠等.唐山郭家屯220KV 数字化变电站工程
实践[D].2009(上接第101
页)。