基于嵌入式系统的PWM的直流电机调速系统
基于AT89C51单片机的PWM直流调速系统

摘要本文基于对PWM控制技术和AT89C51单片机直流调速系统的研究,设计了应用于直流电动机的单片机控制的PWM电流转速双闭环直流调速系统,该系统能够实现对电机的正转、反转、急停、加速、减速的控制以及恒速调节。
论文以直流电机调速系统为控制对象,主要介绍了PWM控制技术的理论以及用单片机实现PWM 控制电机转速的基本原理,绘制出了系统的程序流程图,设计出了系统的硬件电路和软件电路,编写了KeilC51汇编语言,进行了Proteus软件的调试与仿真,仿真结果表明系统满足各项性能指标要求。
关键词:PWM技术;单片机;双闭环;直流电机;调速控制ABSTRACTBased on the study of PWM technology and DC governor system controlled by AT89C51 microprocessor control unit, that applied to DC motorspeed contml governor system which is controlled by microprocessor control unit is designed. This system can make motorspeed contml speed up or slow down or stop rapidly even rotate positively and negatively. One more thing is that DC motorspeed contml controlled by this system can adjust its rotate speed smoothly.The article mainly concentrates on the DC governor system. The theory of PWM technology and basic theory of system controlled by AT89C51 and PWM technology which adjusts the speed of DC motorspeed contml are introduced. The chat of process is drawn out, so as the circuits of system. The KeilC51 language is operated on the simulation platform debugging after it's written out. The consult indicates that the system meets all conditions which are needed.Keywords: PWM technology ;microprocessor control unit ;Double-loop ;DC motorspeed contml ;digital control目录1. 绪论................................................................1 1.1 概况................................................................1 1.2 国内外发展概况....................................................21.3 设计目的和意义....................................................22. 直流调速系统概述.................................................4 2.1 直流电机的工作原理...............................................4 2.2 直流电机的调速方法...............................................52.3 H桥电机驱动的概述...............................................83. 方案论证和选择...................................................7 3.1 稳压电源的选择...................................................10 3.2 电机调速控制模块.................................................8 3.3 PWM调速工作方式.................................................9 3.4 PWM调脉宽方式....................................................93.5 PWM软件实现方式.................................................94. 系统硬件电路设计................................................10 4.1 时钟电路..........................................................10 4.2 复位电路..........................................................11 4.3 稳压电源电路.....................................................10 4.4 信号输入电路.....................................................124.5 电机PWM驱动模块的电路..........................................175. 系统的软件设计...................................................185.2 系统软件设计分析.................................................196. 单片机系统综合调试..............................................20 6.1 PROTEUS设计与仿真平台..........................................20 6.2 PROTEUS设计与单片机传统开发过程比较..........................21 6.3 仿真结果与分析...................................................27参考文献..............................................................23附录...................................................................32附录一程序清单......................................................23附录二硬件原理图....................................................38致谢...................................................................391 绪论1.1 概况现代工业的电力拖动一般都要求局部或全部的自动化,因此必然要与各种控制元件组成的自动控制系统联系起来,而电力拖动[1]则可视为自动化电力拖动系统的简称。
基于MSP430单片机的直流电机PWM调速系统的研究
基于MSP430单片机的直流电机PWM调速系统的研究一、本文概述随着微控制器技术的快速发展,其在各种控制系统中的应用也日益广泛。
MSP430单片机作为一种低功耗、高性能的微控制器,被广泛应用于各种嵌入式系统和智能设备中。
其中,直流电机PWM调速系统就是MSP430单片机的一个重要应用领域。
本文旨在研究基于MSP430单片机的直流电机PWM调速系统。
我们将介绍MSP430单片机的基本特性及其在直流电机控制中的优势。
然后,我们将详细分析PWM(脉冲宽度调制)调速系统的基本原理和优点,以及如何在MSP430单片机上实现PWM控制。
接下来,我们将通过硬件设计和软件编程,构建一个基于MSP430单片机的直流电机PWM调速系统,并对其性能进行实验验证。
我们还将讨论该系统在实际应用中的潜力和可能面临的挑战,如噪声干扰、电机保护、系统稳定性等问题,并提出相应的解决方案。
我们将总结本文的主要研究成果,并展望未来的研究方向和应用前景。
通过本文的研究,我们希望能够为MSP430单片机在直流电机PWM 调速系统中的应用提供理论和实践指导,推动相关技术的发展和应用。
二、MSP430单片机概述MSP430单片机是德州仪器(Texas Instruments,简称TI)推出的一款低功耗、高性能的微控制器。
其独特的设计理念和广泛的应用场景,使得MSP430单片机在众多嵌入式系统中占有一席之地。
MSP430单片机以其超低的功耗、丰富的外设资源、高效的指令集以及灵活的编程方式,被广泛应用于各种低功耗、实时性要求高的嵌入式系统中。
MSP430单片机具有多种型号,涵盖了不同的性能和功能需求。
其核心采用精简指令集(RISC)架构,使得指令执行速度更快,效率更高。
MSP430单片机还具有丰富的外设接口,如串行通信接口(UART)、SPI、I2C等,方便与外部设备进行通信。
在直流电机PWM调速系统中,MSP430单片机扮演着关键角色。
通过编程控制PWM波的占空比,MSP430单片机可以实现对直流电机的精确调速。
基于PWM技术的无刷直流电机的调速系统
基于PWM技术的无刷直流电机的调速系统江苏科技大学本科毕业设计(论文)学院电子信息学院专业自动化学生姓名田旭班级学号1140301218指导教师魏海峰二零一五年六月江苏科技大学本科毕业论文基于PWM技术的无刷直流电机的调速系统设计Brushless DC Motor Speed Control System Based OnPWM江苏科技大学毕业设计(论文)任务书学院名称:电子信息学院专业:自动化学生姓名:田旭学号:1140301218 指导教师:魏海峰职称:副教授摘要无刷直流电机(BLDCM)具有调速性能优异、运行性能可靠和维护方便等优点,相较于有刷直流电机,其采用电子换向取代机械换向,有效地提高了电动机的运行效率,也使得其成品体积更加的轻巧。
但是无刷直流电机也存在转矩脉动、控制器复杂、成本较高等缺陷,这些缺陷的存在也一定程度上影响了无刷直流电机作为高效、先进电机在应用上的普及,因此研究如何改善以及解决无刷直流电机存在的问题便具有更加明显的现实意义。
MATLAB是一款用于数据分析与计算、算法开发以及动态系统建立与仿真的数学软件。
最初是由美国MathWorks公司出品的商用数学软件,其由Matlab 和Simulink两个重要组成部分构成,现在更是应用于工程计算、控制设计、信号处理与通讯、图像处理、信号检测、金融建模设计与分析等领域。
本文通过对无刷直流电机结构以及工作原理的研究与分析,找出导致其具有较大转矩脉动的原因,并先从理论上得到如何抑制转矩脉动的方法,再通过Matlab建立起无刷直流电机的仿真模型,对其仿真结果进行分析与改善,从而有效地抑制无刷直流电机的转矩脉动。
关键词:无刷直流电机,转矩脉动,仿真模型江苏科技大学本科毕业设计(论文)10AbstractBrushless DC motor (BLDCM) has excellent speed performance, reliable performance and easy maintenance, etc., compared to a brush DC motor, which uses electronically commutated replace mechanical commutation, effectively improve the operating efficiency of the motor, but also so that the volume of the finished product more compact. But there brushless DC motor torque ripple controller complexity, high cost and other defects, the presence of these defects also affected to some extent, a brushless DC motor as efficient and advanced motor universal in application, how to improve and therefore research solve the problems of the brushless DC motor will have more obvious practical significance.MATLAB is a tool for data analysis and computation, algorithm development, and simulation of dynamic systems to establish and mathematical software. MathWorks was originally developed by the US company produced commercial mathematical software, which consists of Matlab and Simulink are two important parts, and now it is used in engineering calculations, control design, signal processing and communications, image processing, signal detection, financial modeling design and analysis and other fields.Based on the brushless DC motor structure and working principle of research and analysis to identify the cause of which has a large torque ripple, and theoretically first get how to suppress torque ripples, established through Matlab brushless Simulation Model DC motor, its simulation results are analyzed and improved in order to effectively suppress the torque ripple of the brushless DC motor Keywords:Brushless DC motor; The torque pulsation; The simulation model目录第一章绪论 (14)1.1 研究背景及研究意义 (14)1.2 无刷直流电机调速系统的国内外研究现状 (15)1.3 本文的主要研究内容及章节安排 (16)第二章无刷直流电机的基本原理 (17)2.1 无刷直流电机的基本结构 (17)2.1.1 电机本体 (17)1.电动机定子 (17)2. 电动机转子 (18)2.1.2 位置传感器 (19)2.2 无刷直流电机的工作原理及换相过程 (21)2.2.1 无刷直流电机的工作原理 (21)2.2.2 无刷直流电机的换相过程 (23)2.3 无刷直流电机的应用 (24)2.4 本章小结 (25)第三章基于PWM技术的无刷直流电机转矩脉动抑制 (26)3.1 PWM控制技术简介 (26)3.1.1 PWM控制技术的基本原理 (26)3.1.2 PWM控制技术的控制方法 (27)3.2 Buck变换器的原理及控制方式 (28)3.2.1 Buck变换器的原理 (28)3.2.2 Buck变换器的控制方式 (29)3.3 无刷直流电机转矩脉动的产生 (29)3.3.1传导区转矩脉动 (30)3.3.2换相区转矩脉动 (31)3.4 无刷直流电机转矩脉动的抑制 (33)3.5 本章小结 (36)第四章无刷直流电机的仿真分析 (37)4.1 MATLAB和SIMULINK的介绍 (37)4.2 无刷直流电机的数学模型 (38)4.2.1电机本体模块 (39)4.2.2转矩计算模块 (40)4.2.3速度控制模块 (41)4.2.4电流控制模块 (41)4.2.5电压逆变模块 (42)4.3无刷直流电机的仿真结果 (42)4.4本章小结 (47)结论 (48)致谢 (49)参考文献 (50)附录 (52)第一章绪论1.1 研究背景及研究意义对于工厂生产和社会发展而言,电力拖动都有着举足轻重的地位,为了满足生产工艺的需求,通过控制电机的转矩以及转速来控制电动机的转速以及位置,这样就可以形成一个自动化系统,称之为电力拖动。
基于.PWM的电机调速系统

基于PWM的电机调速系统实验目的:1.学会并掌握可keil软件的使用;2.学会并掌握protues软件的使用;3.通过实验巩固单片机相关知识和检验自身动手能力实验要求:掌握单片机相关知识,利用调PWM占空比的方式来控制直流电机的转速,并且在led数码管上显示转速。
实验设备和仪器:1.89c51单片机最小系统2.直流电机3.示波器实验内容:本次实验设计是由小组五个成员共同完成基于PWM的电机调速系统并完成实物搭建和撰写实验报告。
本次实验小组共提供了两个方案,方案一和方案二,两个方案各自具有优缺点,详细内容会在下面给出。
方案一实验步骤:1.利用protues画电路图,电路图如图1所示:图1:方案一电路图2.根据电路图编写C语言代码:代码如下:#include <reg51.h>sbit PWM=P2^7;sbit CS3=P2^3;sbit CS2=P2^2;sbit CS1=P2^1;sbit CS0=P2^0;sbit key1=P1^0;sbit key2=P1^1;sbit key3=P1^2;sbit key4=P1^3;unsigned char timer1;unsigned char tab[]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90};void Time1Config();void main(void){Time1Config();while(1){if(timer1>100) //PWM周期为100*0.5ms{timer1=0;}if(~key1){if(timer1 <30) //改变30这个值可以改变直流电机的速度{PWM=1;}else{PWM=0;}CS0=0;CS1=0;CS2=1;CS3=0;P0=tab[3];P0=0xff;CS0=0;CS1=0;CS2=0;CS3=1;P0=tab[0];P0=0xff;}else if(~key2){if(timer1 <50){PWM=1;else{PWM=0;}CS0=0;CS1=0;CS2=1;CS3=0; P0=tab[5];P0=0xff;CS0=0;CS1=0;CS2=0;CS3=1; P0=tab[0];P0=0xff;}else if(~key3){if(timer1 <80){PWM=1;}else{PWM=0;}CS0=0;CS1=0;CS2=1;CS3=0; P0=tab[8];P0=0xff;CS0=0;CS1=0;CS2=0;CS3=1; P0=tab[0];P0=0xff;}else if(~key4){if(timer1 <100){PWM=1;}else{PWM=0;}CS0=0;CS1=1;CS2=0;CS3=0; P0=tab[1];CS0=0;CS1=0;CS2=1;CS3=0;P0=tab[0];P0=0xff;CS0=0;CS1=0;CS2=0;CS3=1;P0=tab[0];P0=0xff;}}}void Time1Config(){TMOD|= 0x10; //设置定时计数器工作方式1为定时器//--定时器赋初始值,12MHZ下定时0.5ms--//TH1 = 0xFE;TL1 = 0x0C;ET1 = 1; //开启定时器1中断EA = 1;TR1 = 1; //开启定时器}void Time1(void) interrupt 3 //3 为定时器1的中断号{TH1 = 0xFE; //重新赋初值TL1 = 0x0C;timer1++;}3.实验仿真,部分仿真结果如图2图3所示:图2:仿真结果图(1)图3:仿真结果图(2)4.实物验证结果如图4所示:图4:方案一实物验证结果实物验证可以明显感觉到电机转速的变化,由于每个开发板不同,相比仿真程序,对实物验证程序进行了略微的修改,最终能达到要求。
毕业设计(论文)基于单片机的pwm直流调速系统设计

基于单片机的PWM直流调速系统设计摘要随着时代的进步和科技的发展,电机调速系统在工农业生产、交通运输以及日常生活中起着越来越重要的作用,因此,对电机调速的研究有着积极的意义.长期以来,直流电机被广泛应用于调速系统中,而且一直在调速领域占居主导地位。
基于单片机的直流电机调速系统硬件电路的标准化程度高,制作成本低,且不受器件温度漂移的影响。
其控制软件能够进行逻辑判断和复杂运算。
系统的稳定性好,可靠性高。
直流电动机具有优良的起、制动性能,宜于在广泛范围内平滑调速。
在轧钢机、矿井卷机、挖掘机、金属切削机床、造纸机、高层电梯等领域中得到广泛应用。
本设计是基于单片机控制的PWM直流电机调速系统,系统以AT89C52单片机为核心,以2A、1000r/min小直流电机为控制对象,以L298N为H桥驱动芯片实现速度、电流反馈双闭环。
采用PID控制算法,调节PWM占空比从而控制电机两端电压,以达到调速的目的。
用4*3键盘输入有关控制信号及参数,可以实现电机的启制动、正反转、速度调节。
并在4位LED上实时显示输入参数及动态转速。
关键词:单片机、直流电机、PWM、PIDBased on SCM PWM dc speed control system designAbstractWith the progress of The Times and the development of science and technology, motor speed system in agricultural production, transportation and daily life plays a more and more important role in motor speed, therefore, the research has positive significance. For a long time, have been widely applied in dc motor control system, and has been inhabited areas in speed dominant. Based on SCM dc motor speed control system of high degree of standardization of hardware circuit, low cost, and the temperature drift. Device, The control software to logic and complex operation. The system has good stability and reliability. Dc motor with excellent, braking performance, and in a wide range smooth speed. In the mill, mine machine, excavator, metal cutting machine, paper machine, high-level elevator is widely used in the fields.The design is based on single chip microcomputer control system of dc motor control PWM, by AT89C52 singlechip system, and 1000r/min small double-a dc motor to control, L298N H bridge to drive chip realize speed, double loop current feedback. PID control algorithm, regulate and control PWM occupies emptiescompared to achieve both voltage motor speed. Use 4 * 3 keyboard input signal and the relevant control parameters, can realize the rev brake motor speed regulation, and positive &negative. And in four LED on real-time display input parameters and dynamic speed.Keywords:monolithic integrated circuits, a direct motor,PWM,PID目录基于单片机的PWM直流调速系统设计 (I)摘要 (I)Abstract (II)第一章绪论 (1)1.1课题背景 (1)1.2课题功能 (1)第二章系统硬件电路的设计 (2)2.1 系统总体设计 (2)2.1.1 系统总体设计框图 (2)2.1.2单片机的选择及其简介 (2)2.1.3 其他芯片简介 (6)2.2 PWM信号发生电路设计 (18)2.2.1 PWM的基本原理 (18)2.2.2 PWM信号发生电路设计 (20)2.2.3 H桥芯片的工作原理 (21)2.3 主电路设计 (24)2.4 转速和电流的测量 (24)2.5 AD转换 (26)2.6显示与键盘电路 (26)第三章系统软件程序的设计 (27)3.1 PID控制算法原理及流程图 (27)3.2 系统部分程序的设计 (29)3.2.1 单片机资源分配 (29)3.2.2 程序流程图 (30)结论 (32)参考文献 (34)附录................................................................................................ 错误!未定义书签。
基于PWM控制的直流电机自动调速系统设计

基于PWM控制的直流电机自动调速系统设计一、引言直流电机是工业中最常见的电动机之一,其工作原理简单,结构紧凑,控制方便,广泛应用于各行各业。
为了满足不同工况下的运行需求,需要设计一个自动调速系统来调整直流电机的转速。
本文将基于PWM控制方法设计一个直流电机自动调速系统。
二、系统设计1.系统结构直流电机自动调速系统的基本结构包括传感器、控制器、电源和执行器。
传感器用于检测电机的转速,控制器根据检测到的转速信号进行处理,并通过PWM控制方法调整电机的输入电压,从而实现自动调速。
2.传感器选择直流电机的转速检测一般使用霍尔效应传感器来实现。
霍尔传感器可以直接测量电机转子的位置,并根据位置变化来计算转速。
传感器输出的信号经过放大和处理后,可以作为控制器的输入信号。
3.控制器设计控制器是整个自动调速系统的核心部分。
控制器接收传感器的转速信号,并通过PID算法对电机的转速进行调节。
PID算法是一种经典的控制方法,可以根据当前的偏差、偏差变化率和偏差积分值来计算控制量。
在本系统中,控制器输出的控制量即为PWM信号。
4.PWM控制方法PWM(Pulse Width Modulation)控制方法是一种通过调整脉冲宽度来控制输出电压的方法。
在本系统中,PWM控制方法可以通过改变PWM信号的占空比来调整电机的输入电压。
当需要提高电机转速时,增加PWM信号的占空比;当需要降低电机转速时,减小PWM信号的占空比。
通过反馈控制,控制器可以根据实际转速信号不断调整PWM信号的占空比,从而实现电机的自动调速。
5.电源选择在直流电机自动调速系统中,电源需要提供稳定的直流电压以供电机正常工作。
一般可选择线性稳压器或开关稳压器来提供所需的直流电压。
在选择电源时,需要考虑电机的功率和电源的效率,以确保系统的稳定性和可靠性。
6.执行器选择执行器是将控制信号转换为实际操作的部分。
在直流电机自动调速系统中,执行器可选择光耦隔离器和驱动芯片来实现PWM信号控制。
基于MC51单片机的直流电机PWM调速系统
基于MC51单片机的直流电机PWM调速系统一、本文概述随着现代电子技术的快速发展,直流电机调速系统在各种工业控制、自动化设备及智能家居等领域中得到了广泛应用。
MC51单片机作为一种功能强大、性价比高的微控制器,具有集成度高、稳定性好、控制灵活等优点,在电机控制领域具有广泛的应用前景。
本文旨在探讨基于MC51单片机的直流电机PWM(脉冲宽度调制)调速系统的设计与实现。
本文将首先介绍直流电机PWM调速的基本原理,包括PWM技术的特点及其在电机调速中的应用。
随后,将详细阐述基于MC51单片机的PWM调速系统的硬件设计,包括单片机选型、功率驱动电路、电机接口电路等关键部分的设计与搭建。
在软件设计方面,本文将介绍如何利用MC51单片机的定时器、I/O端口等资源,实现PWM信号的生成与控制,以及如何通过编程实现电机的精确调速。
本文还将对系统的调试与优化进行阐述,包括电路调试、软件调试、性能优化等方面的内容,以确保系统的稳定性和可靠性。
本文将总结基于MC51单片机的直流电机PWM调速系统的优点与应用前景,为相关领域的研究和实践提供参考和借鉴。
通过本文的研究与探讨,读者可以深入了解基于MC51单片机的直流电机PWM调速系统的设计与实现过程,掌握相关硬件与软件设计技术,为实际应用中的电机调速控制提供有效的解决方案。
二、系统总体设计在本设计中,我们将基于MC51单片机构建一个直流电机PWM(脉冲宽度调制)调速系统。
该系统的设计目标是实现直流电机的精确速度控制,以满足不同应用场景的需求。
总体设计包括硬件设计和软件设计两个部分。
硬件设计主要包括MC51单片机、直流电机、电机驱动电路、PWM 信号生成电路、电源电路以及必要的接口电路。
MC51单片机作为系统的核心控制器,负责生成PWM信号、接收用户输入以及处理相关控制逻辑。
直流电机是执行机构,通过电机驱动电路与MC51单片机相连,接收PWM信号以驱动电机转动。
PWM信号生成电路用于将MC51单片机输出的数字信号转换为模拟的PWM信号,以控制电机的转速。
嵌入式PWM模块驱动调速电机C程序

#include<lm3sxxx.h>unsigned long TheSysClock=12000000UL;#include"lcdinit.h"#define PB0_PWM2 GPIO_PIN_0 //PWM2、产生正转信号#define PB1_PWM3 GPIO_PIN_1 //PWM3、产生反转信号#define KEY_PERIPH SYSCTL_PERIPH_GPIOC#define KEY_PORT GPIO_PORTC_BASE#define KEY1_PIN GPIO_PIN_4 //正反转切换#define KEY2_PIN GPIO_PIN_5 //2档#define KEY3_PIN GPIO_PIN_6 //1档#define KEY4_PIN GPIO_PIN_7 //制动unsigned int flag,value,D,S;/*****************************************************************************/ void clockInit(void){SysCtlLDOSet(SYSCTL_LDO_2_50V); // 设置LDO输出电压SysCtlClockSet(SYSCTL_USE_OSC | // 系统时钟设置SYSCTL_OSC_MAIN | // 采用主振荡器SYSCTL_XTAL_6MHZ | // 外接6MHz晶振SYSCTL_SYSDIV_1); // 不分频TheSysClock = SysCtlClockGet(); // 获取当前的系统时钟频率}void GPIO_Port_C_ISR(void){unsigned long ulStatus;ulStatus = GPIOPinIntStatus(GPIO_PORTC_BASE, true); // 读取中断状态GPIOPinIntClear(GPIO_PORTC_BASE, ulStatus); // 清除中断状态,重要if (ulStatus & KEY1_PIN) // 如果PC4的中断状态有效{ SysCtlDelay(200); //消除按键抖动flag=~flag;}if (ulStatus & KEY2_PIN) // 如果PC5的中断状态有效{ SysCtlDelay(200);value=50;S=2; //S=2表示高速}if (ulStatus & KEY3_PIN) // 如果PC6的中断状态有效{ SysCtlDelay(200);value=200;S=1; //S=1表示低速}if (ulStatus & KEY4_PIN) // 如果PC7的中断状态有效{ SysCtlDelay(200);value=300;S=0; //S=0表示制动}}/***************************************************************************/ void lcd_disp(){ lcd_pos(0,0);lcd_strwdat("Direct Is:"); //第一行显示正反转lcd_pos(0,14);lcd_write(1,D); //LCD写数据lcd_pos(1,0);lcd_strwdat("Now Speed Is:");//第二行显示转速的档位lcd_pos(1,14);lcd_write(1,S); //LCD写数据}void flag_1() //反转{ PWMOutputState(PWM_BASE, PWM_OUT_3_BIT, true);PWMOutputState(PWM_BASE, PWM_OUT_2_BIT, false); //使能或禁止PWM的输出PWMGenPeriodSet(PWM_BASE, PWM_GEN_1, 300); // 设置PWM发生器1的周期PWMPulseWidthSet(PWM_BASE, PWM_OUT_3, value); // 设置PWM2输出的脉冲宽度D=0; //D=0表示反转}void flag_0(){ PWMOutputState(PWM_BASE, PWM_OUT_2_BIT, true); //正转PWMOutputState(PWM_BASE, PWM_OUT_3_BIT, false);PWMGenPeriodSet(PWM_BASE, PWM_GEN_1, 300); // 设置PWM发生器1的周期PWMPulseWidthSet(PWM_BASE, PWM_OUT_2, value); // 设置PWM3输出的脉冲宽度D=1; //D=1表示正转}/***************************************************************************/ int main (void){lcd_init();clockInit();SysCtlPeripheralEnable (KEY_PERIPH); // 使能KEY所在的GPIO端口GPIOPinTypeGPIOInput(KEY_PORT, KEY1_PIN|KEY2_PIN|KEY3_PIN|KEY4_PIN);// 设置key1、key2、key3、key4为输入GPIOIntTypeSet(KEY_PORT, KEY1_PIN|KEY2_PIN|KEY3_PIN|KEY4_PIN, GPIO_LOW_LEVEL);// 设置KEY1、KEY2、KEY3、KEY4管脚的中断类型GPIOPinIntEnable(KEY_PORT, KEY1_PIN|KEY2_PIN|KEY3_PIN|KEY4_PIN);// 使能KEY1、KEY2、KEY3、KEY4所在管脚的中断IntEnable(INT_GPIOC); // 使能GPIOC端口中断SysCtlPeripheralEnable(SYSCTL_PERIPH_GPIOB); // 使能PWM2和PWM3输出所在GPIOSysCtlPeripheralEnable(SYSCTL_PERIPH_PWM); // 使能PWM模块SysCtlPWMClockSet(SYSCTL_PWMDIV_1); // PWM时钟配置:不分频GPIOPinTypePWM(GPIO_PORTB_BASE, PB0_PWM2); // PB0配置为PWM功能GPIOPinTypePWM(GPIO_PORTB_BASE, PB1_PWM3); // PB1配置为PWM功能PWMGenConfigure(PWM_BASE, PWM_GEN_1, // 配置PWM发生器1:加减计数PWM_GEN_MODE_UP_DOWN |PWM_GEN_MODE_NO_SYNC);PWMOutputState(PWM_BASE, PWM_OUT_2_BIT, true); //初始化时flag=0、即电机初始化时是正转PWMOutputState(PWM_BASE, PWM_OUT_3_BIT, false);PWMGenPeriodSet(PWM_BASE, PWM_GEN_1, 300); // 设置PWM发生器1的周期PWMPulseWidthSet(PWM_BASE, PWM_OUT_2, value); // 设置PWM3输出的脉冲宽度PWMGenEnable(PWM_BASE, PWM_GEN_1); // 使能PWM发生器1IntMasterEnable( ); // 使能处理器中断while(1){ SysCtlDelay(200);if(flag){ flag_1();lcd_disp();}else{ flag_0();lcd_disp();}}}/*****************************************************************************/。
基于MC51单片机的直流电机PWM调速系统
基于MC51单片机的直流电机PWM调速系统一、概述随着现代工业技术的不断发展,直流电机因其良好的调速性能和控制精度,在工业自动化、机器人、航空航天等领域得到了广泛的应用。
PWM(脉宽调制)技术作为一种高效的电机调速方法,能够有效地控制直流电机的速度和方向。
本文旨在介绍一种基于MC51单片机的直流电机PWM调速系统,通过单片机实现对直流电机的精确控制。
该系统以MC51单片机为核心控制器,利用其强大的运算能力和丰富的外设接口,实现对直流电机的PWM调速控制。
系统通过采集电机的实时转速信息,结合用户设定的目标转速,利用PWM信号调整电机的输入电压,从而实现对电机转速的精确控制。
系统还具备过流、过压等保护功能,确保电机在安全可靠的环境下运行。
基于MC51单片机的直流电机PWM调速系统具有结构简单、控制精度高、响应速度快等优点,适用于各种需要精确控制直流电机转速的场合。
通过本系统的研究与应用,可以进一步提高工业自动化水平,推动相关产业的发展。
1. 直流电机PWM调速系统的研究背景与意义直流电动机作为最早出现的电动机类型,长期以来在调速控制领域占据着统治地位。
其良好的线性调速特性、简单的控制性能、高效的能量转换效率以及优异的动态特性,使得直流电动机在各种应用场景中得到了广泛的应用。
特别是在对调速性能要求较高的场合,如电力牵引、轧钢机、起重设备等,直流电动机更是发挥了不可替代的作用。
随着科学技术的不断进步和工业应用需求的日益复杂,传统的直流电机调速方式已经难以满足现代工业生产的需求。
传统的调速方法往往存在调速精度不高、调速范围有限、能耗较大等问题,严重制约了直流电动机在更多领域的应用。
为了解决这些问题,PWM(脉冲宽度调制)调速技术应运而生。
PWM技术利用微处理器的数字输出来对模拟电路进行控制,具有控制简单、灵活和动态响应好的优点。
通过将PWM技术应用于直流电机调速系统,可以实现对电机转速的精确控制,提高调速精度和调速范围,同时降低能耗,提高系统的稳定性和可靠性。
基于51单片机的PWM直流电机调速系统
基于51单片机的PWM直流电机调速系统一、本文概述随着现代工业技术的飞速发展,直流电机调速系统在众多领域如工业自动化、智能家居、航空航天等得到了广泛应用。
在众多调速方案中,基于脉冲宽度调制(PWM)的调速方式以其高效、稳定、易于实现等优点脱颖而出。
本文旨在探讨基于51单片机的PWM直流电机调速系统的设计与实现,以期为相关领域的技术人员提供一种可靠且实用的电机调速方案。
本文将简要介绍PWM调速的基本原理及其在直流电机控制中的应用。
随后,将详细介绍基于51单片机的PWM直流电机调速系统的硬件设计,包括电机选型、驱动电路设计、单片机选型及外围电路设计等。
在软件设计部分,本文将阐述PWM信号的生成方法、电机转速的检测与控制算法的实现。
还将对系统的性能进行测试与分析,以验证其调速效果及稳定性。
本文将总结基于51单片机的PWM直流电机调速系统的优点与不足,并提出改进建议。
希望通过本文的阐述,能为相关领域的研究与应用提供有益参考。
二、51单片机基础知识51单片机,也被称为8051微控制器,是Intel公司在1980年代初推出的一种8位CISC(复杂指令集计算机)单片机。
尽管Intel公司已经停止生产这种芯片,但由于其架构的通用性和广泛的应用,许多其他公司如Atmel、STC等仍然在生产与8051兼容的单片机。
51单片机的核心部分包括一个8位的CPU,以及4KB的ROM、低128B 的RAM和高位的SFR(特殊功能寄存器)等。
它还包括两个16位的定时/计数器,四个8位的I/O端口,一个全双工的串行通信口,以及一个中断系统。
这些功能使得51单片机在多种嵌入式系统中得到了广泛的应用。
在PWM(脉冲宽度调制)直流电机调速系统中,51单片机的主要作用是生成PWM信号以控制电机的速度。
这通常是通过定时/计数器来实现的。
定时/计数器可以设置一定的时间间隔,然后在这个时间间隔内,CPU可以控制I/O端口产生高电平或低电平,从而形成PWM信号。
基于单片机的PWM直流电机调速系统设计论文(附电路图、程序清单)
图 2.2 直流电机原理图
2.2 直流电机的调速方法
根据直流电机的基本原理,由感应电势、电磁转矩以及机械特性方程式可知,直 流电动机的调速方法有三种: (1)调节电枢供电电压 U。改变电枢电压主要是从额定电压往下降低电枢电压, 从电动机额定转速向下变速,属恒转矩调速方法。对于要求在一定范围内无级平滑调 速的系统来说,这种方法最好。 大容量可调直流电源。 (2)改变电动机主磁通 。改变磁通可以实现无级平滑调速,但只能减弱磁通进 变化时间 变化遇到的时间常数较小,能快速响应,但是需要
第1章 引 1.1 概况
言
现代工业的电力拖动一般都要求局部或全部的自动化,因此必然要与各种控制元 件组成的自动控制系统联系起来,而电力拖动则可视为自动化电力拖动系统的简称。 在这一系统中可对生产机械进行自动控制。 随着近代电力电子技术和计算机技术的发展以及现代控制理论的应用,自动化电 力拖动正朝着计算机控制的生产过程自动化的方向迈进。以达到高速、优质、高效率 地生产。在大多数综合自动化系统中,自动化的电力拖动系统仍然是不可缺少的组成 部分。另外,低成本自动化技术与设备的开发,越来越引起国内外的注意。特别对于 小型企业,应用适用技术的设备,不仅有益于获得经济效益,而且能提高生产率、可 靠性与柔性,还有易于应用的优点。自动化的电力拖动系统更是低成本自动化系统的 重要组成部分。 在如今的现实生活中,自动化控制系统已在各行各业得到广泛的应用和发展,其 中自动调速系统的应用则起着尤为重要的作用。虽然直流电机不如交流电机那样结构 简单、价格便宜、制造方便、容易维护,但是它具有良好的起、制动性能,宜于在广 泛的范围内平滑调速,所以直流调速系统至今仍是自动调速系统中的主要形式。现在 电动机的控制从简单走向复杂,并逐渐成熟成为主流。其应用领域极为广泛,例如: 军事和宇航方面的雷达天线、火炮瞄准、惯性导航等的控制;工业方面的数控机床、 工业机器人、印刷机械等设备的控制;计算机外围设备和办公设备中的打印机、传真 机、复印机、扫描仪等的控制;音像设备和家用电器中的录音机、数码相机、洗衣机、 空调等的控制。 随着电力电子技术的发展, 开关速度更快、 控制更容易的全控型功率器件MOSFET 和IGBT成为主流,脉宽调制技术表现出较大的优越性:主电路线路简单,需要用的功 率元件少;开关频率高,电流容易连续,谐波少,电机损耗和发热都较小;低速性能 好,稳速精度高,因而调速范围宽;系统快速响应性能好,动态抗扰能力强;主电路 元件工作在开关状态,导通损耗小,装置效率较高;近年来,微型计算机技术发展速
嵌入式,直流调速
** 1表示OK
**------------------------------------------------------------------------------------------------------
** File Name: ZLG7290.h
** Last modified Date: 2006-01-13
** Last Version: v1.1
** Description: ZLG7290操作软件包。(头文件)
**------------------------------------------------------------------------------------------------------
** Modified by:黄绍斌
** Modified date:2006-01-13
** Version:v1.1
** Descriptions:
**
*******************************************************************************************************/
** Descriptions:使用硬件I2C发送数据。
** Input: sla从机地址
**suba器件子地址(第一字节用来表示子地址字节个数)
**s发送数据缓冲区
**no发送数据个数
** Output:操作成功返回TRUE,仲载失败/无从机应答返回FALSE
** Note:使用前设置好参数。程序不会更改s、suba缓冲区的数据
基于嵌入式PWM直流电机调速系统的电路设计
基于嵌入式PWM直流电机调速系统的电路设计嵌入式PWM直流电机调速系统是一种常见的电力控制系统,它广泛应用于各种机械设备和工业自动化领域中。
在电路设计过程中,需要考虑多种因素,如输入输出信号、控制逻辑以及保护措施等。
在接下来的800字中,将介绍基于嵌入式PWM 直流电机调速系统的电路设计。
首先,嵌入式系统需要的主要组件包括CPU、存储器、输入输出接口及其他外围设备。
对于PWM直流电机调速系统,需要使用PWM发生器、电流控制电路和电机驱动器。
PWM发生器可通过可编程逻辑阵列(FPGA)或专用芯片实现。
电流控制电路可以采用模拟电路或数字电路实现。
电机驱动器需要输出高功率的脉冲,可选择集成型半导体器件或使用晶体管和二极管自己搭建电路。
其次,在电路设计中,需要确定其电源电压和额定电流。
为了保持控制系统的可靠性,应在系统开始设计时在输出部件之前加入保护电路,以避免过载或瞬时电流峰值的毁坏。
同时,还需考虑在输出部件之后加入反馈电路,以便实时监测电机的运行状态并对其进行调整。
此外,为确保稳定的复位行为,还需设置电路的复位电路。
最后,为了使系统更具可靠性和功能性,还需要在软件层面上进行优化。
嵌入式处理器主要负责编排PWM波形信号,根据传感器反馈控制电流并输出控制脉冲,以便实现直流电机的调速控制。
可以通过采用精确的定时和计数方法,优化嵌入式控制器的电路,以实现更精确的控制。
总结,嵌入式PWM直流电机调速系统的电路设计需要考虑多个因素,如输入输出信号、控制逻辑、保护电路、反馈电路等。
在电路设计中,还需确定其电源电压和额定电流,并在软件层面上进行优化以实现更精确的控制。
只有在这些方面都取得广泛的应用和稳定的设计水平,才能使嵌入式PWM直流电机调速系统在各种机械设备和工业自动化领域中发挥最大的作用。
基于L298芯片PWM控制直流电机的闭环调速系统方案

运动控制系统课程设计题目:基于L298芯片PWM控制直流电机的闭环调速系统院系名称:电气工程学院专业班级:自动1302学生:鹏涛学号:9指导教师:毅摘要近年来,随着科技的进步,直流电机得到了越来越广泛的应用,直流具有优良的调速特性,调速平滑,方便,调速围广,过载能力强,能承受频繁的冲击负载,可实现频繁的无极快速起动、制动和反转,为满足生产过程自动化系统各种不同的特殊要求,对直流电机调速提出了较高的要求,改变电枢回路电阻调速、改变电压调速等技术已远远不能满足实际应用的要求,通过PWM方式控制直流电机调速的方法就应运而生。
本论文主要研究了利用MC51单片机控制PWM信号从而实现对电压改变最后控制直流电机进行调速,并且通过单元模块电路分析了整个系统的工作原理。
以C语言进行软件编写,通过软件编程对PWM信号占空比进行调节,单片机根据程序进行操作,进一步控制了H桥电路的输入信号,而测速系统把电机转速反馈给单片机通过按键控制其转速,LCD把转速显示出来,从而实现电动机的调速、变向等功能,这种设计方法的电路简单,具有操作简单、非常实用前景和价值。
关键词:直流电机;MC51;PWM调速;L298;LCD1602目录引言1一、调速系统总体设计21.1系统总体设计说明21.2系统总体设计框图2二、调速系统的硬件电路的设计与原理32.1基于单片机的电机控制设计32.1.1单片机简介32.1.2单片机在电机控制方面的应用42.2电机驱动电路设计52.2.1驱动电路原理介绍52.2.2驱动电路的专用芯片选用与设计62.2.3调速系统驱动电路设计与分析72.3电机转速采集电路设计92.3.1速度采集的原理与方法92.3.2电机转速采集电路设计102.4显示模块设计102.4.1显示模块的原理与方法102.4.2显示模块电路设计122.5键盘输入模块设计132.5.1键盘输入模块的原理与方法132.5.2键盘输入模块电路设计14三、调速系统数字部分的设计与原理143.1 PID控制器143.1.1 PID控制的原理与方法143.1.2数字PID算法的实现153.2数字测速模块163.2.1数字测速模块的设计思想与算法163.2.2数字测速系统流程图173.3 128⨯64LCD显示模块173.3.1 128⨯64LCD显示器的控制方法173.4行列式键盘输入模块193.4.1行列式键盘输入模块的设计思想193.4.2 行列式键盘输入模块的程序流程图203.5.PWM调速方法设计203.5.1对PWM控制的介绍203.5.2 PWM脉冲的产生213.5.3 PWM脉冲产生模块的程序流程图22 设计心得22参考文献23附录1(完整电路图)24附录2(程序源码)25引言对直流电机转速的控制方法可分为两类:励磁控制与电枢电压控制。
基于单片机的PWM直流可逆调速系统设计
学士学位毕业设计(论文)基于单片机的PWM直流可逆调速系统设计学生姓名:学号:指导教师:所在学院:专业:电气工程及其自动化摘要本设计主要介绍了该系统的硬件以及软件具体设计,并对硬件方框图和软件流程图作了一定的描述。
根据硬件方框图设计了以下功能模块STC89C52芯片,通过L298全桥驱动芯片,对脉冲进行处理,放大,输出控制电机的转速。
控制L298大功率H桥路驱动直流电机已达到控制转速的目的。
通过数码管将速度等级显示出来,此外可以通过按键控制电机的正传反转、以及电机速度加和减。
系统设计合理、功能完善、性能优越,在实际生产中应用效果良好,具有控制方便、组态简单和灵活性大等优点。
关键词:STC89C52 单片机PWM调速ABSTRACTThis paper introduces the design of the system hardware and software design, and the hardware block diagram and software flow chart and gives some description. According to the hardware block diagram of the following function modules of STC89C52 chip, the design, the L298 full bridge driver chip, the pulse processing, amplification, output to control the speed of motor. Control of the L298 high power H bridge drive DC motor has to control the speed of the. Through the digital tube display speed grade, also can through the button control motor story of inversion, and the motor speed to add and subtract. The system design is reasonable, complete functions, superior performance, good results in the actual production, easy to control, simple and flexible configuration advantages.Keywords: STC89C52 MCU PWM speed control目录摘要 (I)ABSTRACT (II)前言 (IV)1绪论 (1)1.1课题研究的背景 (1)1.2国内外技术发展的现状 (2)1.3本设计的目标任务 (2)2系统总体方案 (3)2.1主控制芯片的选择 (3)2.2显示电路的比较与选择 (3)2.3电机调速控制模块 (3)2.4电源电路与电机驱动电路 (4)3系统硬件方案设计 (5)3.1系统总电路框图设计 (5)3.2系统模块电路设计及原理 (5)4系统的软件设计 (16)4.1系统的整体程序流程图 (16)4.2数码管LED显示程序设计 (17)4.3电机控制子程序 (18)5系统调试 (19)5.1常见的故障分析 (19)5.2系统调试注意事项 (19)结论 (20)参考文献 (21)致谢 (22)附录一硬件原理图 (23)附录二程序源代码 (24)前言近年来,随着科技的进步,直流电机得到了越来越广泛的应用,直流具有优良的调速特性,调速平滑,方便,调速范围广,过载能力强,能承受频繁的冲击负载,可实现频繁的无极快速起动、制动和反转,需要满足生产过程自动化系统各种不同的特殊要求,从而对直流电机提出了较高的要求,改变电枢回路电阻调速、改变电压调速等技术已远远不能满足现代科技的要求,这是通过PWM方式控制直流电机调速的方法就应运而生。
基于PWM控制的直流电机自动调速系统设计 大功率直流电机调速系统设计
目录1 绪论 (1)1.1 课题的研究背景和意义 (1)1.2 本设计的主要内容 (2)2 脉宽调制技术及其在直流电动机控制系统中的应用 (3)2.1 直流电机 (3)2.1.1 直流电机的构成和基本工作原理 (3)2.1.2 直流电动机控制系统中的PWM控制器 (8)2.2 无刷直流电动机控制系统中的PWM控制器 (8)2.3 脉宽调制(PWM)变换器 (10)2.3.1 双极式可逆PWM变换器 (10)2.3.2 单极式可逆PWM变换器 (13)2.4 PWM调制中的最佳开关频率计算 (15)3 系统的硬件设计 (16)3.1 单片机模块介绍 (16)3.1.1 单片机晶振电路 (19)3.1.2 单片机复位电路 (19)3.2 AD转换模块 (21)4 系统软件设计 (23)4.1 系统总程序框图设计 (23)4.2 电机转速测量程序设计 (25)4.3PWM信号的单片机程序实现 (27)结论 (28)参考文献 (28)致谢 (30)1 绪论1.1 课题的研究背景和意义直流电动机是最早出现的电动机,也是最早能实现调速的电动机。
长期以来,直流电动机一直占据着调速控制的统治地位。
由于它具有良好的线性调速特性,简单的控制性能,高的效率,优异的动态特性;尽管近年来不断受到其他电动机(如交流变频电机、步进电机等)的挑战,但到目前为止,它仍然是大多数调速控制电动机的优先选择。
近年来,直流电动机的结构和控制方式都发生了很大变化。
随着计算机进入控制领域以及新型的电力电子功率元件的不断出现,使采用全控型的开关功率元件进行脉宽调制 (PulseWidthModulation,简称PWM)控制方式已成为绝对主流。
这种控制方式很容易在单片机控制中实现,从而为直流电动机控制数字化提供了契机。
五十多年来,直流电气传动经历了重大的变革。
首先,实现了整流器件的更新换代,从50年代的使用己久的直流发电机一电动机组(简称G-M系统)及水银整流装置,到60年代的晶闸管电动机调速系统(简称V-M系统),使得变流技术产生了根本的变革。
基于STM32的直流电机PWM调速控制
(《嵌入式系统及接口技术》课程大作业)课程名称:嵌入式系统及接口技术班级专业:姓名学号:指导老师:电动摩托车控制器中的电机PWM调速摘要:随着“低碳”社会理念的深入,新型的电动摩托车发展迅速,逐渐成为人们主要的代步工具之一,由于直流无刷电机的种种优点,在电动摩托车中也得到了广泛应用,因此,本文控制部分主要介绍一种基于STM32F103芯片的新型直流无刷电机调速控制系统,这里主要通过PWM技术来进行电机的调速控制,且运行稳定,安全可靠,成本低,具有深远的意义。
1.总体设计概述1.1 直流无刷电机及工作原理直流无刷电机(简称BLDCM),由于利用电子换向取代了传统的机械电刷和换向器,使得其电磁性能可靠,结构简单,易于维护,既保持了直流电机的优点又避免了直流电机因电刷而引起的缺陷,因此,被广泛应用。
另外,由于直流无刷电机专用控制芯片价格昂贵,本文介绍了一种基于STM32的新型直流无刷电机控制系统,既可降低直流无刷电机的应用成本,又弥补了专用处理器功能单一的缺点,具有重要的现实意义和发展前景。
工作原理:直流无刷电机是同步电机的一种,其转子为永磁体,而定子则为三个按照星形连接方式连接起来的线圈,根据同步电机的原理,如果电子线圈产生一个旋转的磁场,则永磁体的转子也会随着这个磁场转动因此,驱动直流无刷电机的根本是产生旋转的磁场,而这个旋转的磁场可以通过调整A、B、C三相的电流来实现,其需要的电流如图1所示随着我国经济和文化事业的发展,在很多场合,都要求有直流电机PWM调速系统来进行调速,诸如汽车行业中的各种风扇、刮水器、喷水泵、熄火器、反视镜、宾馆中的自动门、自动门锁、自动窗帘、自动给水系统、柔巾机、导弹、火炮、人造卫星、宇宙飞船、舰艇、飞机、坦克、火箭、雷达、战车等场合。
1.2 总体设计方案总体设计方案的硬件部分详细框图如图1所示。
图1 总体方案系统框图该方案主要运行状况如下:通过摩托车车把的转动来改变其机械位置,然后这个变量通过ADC 转换后,传送其调速信号给STM32F103,另外,霍尔传感器将其对电机速度的检测信号也传送给STM32,在STM32中,首先根据ADC 的值改变PWM 波形,并且与霍尔传感器的检测信号进行叠加,最终输出叠加后的PWM 波形给功率驱动电路,从而驱动电机并对其进行速度的控制和调节。
基于嵌入式ARM+Linux平台的直流电机调速控制系统的设计

题目基于嵌入式ARM+Linux平台的直流电机调速控制系统基于嵌入式ARM+Linux平台的直流电机调速控制系统的设计摘要本设计基于北京博创兴业科技有限公司开发的UP-NETARM2410-S嵌入式实验平台,它采用ARM7TDMI 内核的三星S3C44B0X01 芯片,且采用RedHatLinux9.0作为它的操作系统。
设计了调速控制系统,并实现驱动程序对直流电机的控制,电机的转动情况会通过实验箱上的AD模块中电位器的旋转不同而变化。
在UP-NETARM2410-S嵌入式实验平台上的实验结果表明系统运行正常、稳定。
关键词:ARM;Linux;直流电机;驱动一、设计要求采用实验箱上的电位器作为信号输入器件,控制直流电机的运转方向和运转速度。
电位器处于中间值时,电机停止不转,电位器顺时针调大时电机顺时针旋转,且速度随着电位器的旋转而增加。
电位器向逆时针转动调小时,电机逆时针旋转,且速度随着电位器旋转的角度增加。
电位器转到最大或最小值时,电机的速度应该达到最高速度。
电位器在中间位置时,电机不应该出现抖动情况。
二、Linux开发环境设置1、建立工作目录[root@home]# mkdir zgc[root@home]# cd zgc2、编写程序源代码在Linux 下的文本编辑器有许多,常用的是vim 和Xwindow 界面下的gedit 等,在本次开发过程中使用vim,我们可以是用下面的命令来编写dcm_main.c 的源代码,进入10_dcmotor目录使用vi 命令来编辑代码:[root@10_dcmotor]# vi dcm_main.c按“i”或者“a”进入编辑模式,将上面的代码录入进去,完成后按Esc 键进入命令状态,再用命令“:wq”保存并退出。
这样我们便在当前目录下建立了一个名为dcm_main.c 的文件。
3、编写Makefile要使上面的dcm_main.c 程序能够运行,我们必须要编写一个Makefile 文件,Makefile 文件定义了一系列的规则,它指明了哪些文件需要编译,哪些文件需要先编译,哪些文件需要重新编译等等更为复杂的命令。
PWM控制电机调速系统
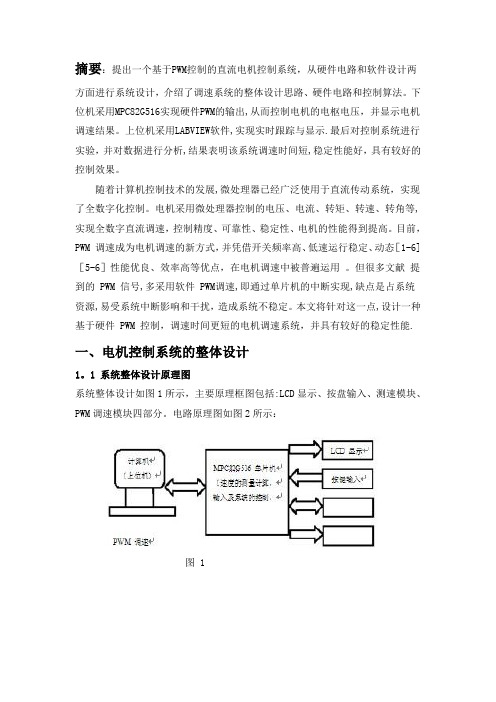
摘要:提出一个基于PWM控制的直流电机控制系统,从硬件电路和软件设计两方面进行系统设计,介绍了调速系统的整体设计思路、硬件电路和控制算法。
下位机采用MPC82G516实现硬件PWM的输出,从而控制电机的电枢电压,并显示电机调速结果。
上位机采用LABVIEW软件,实现实时跟踪与显示.最后对控制系统进行实验,并对数据进行分析,结果表明该系统调速时间短,稳定性能好,具有较好的控制效果。
随着计算机控制技术的发展,微处理器已经广泛使用于直流传动系统,实现了全数字化控制。
电机采用微处理器控制的电压、电流、转矩、转速、转角等,实现全数字直流调速,控制精度、可靠性、稳定性、电机的性能得到提高。
目前,PWM 调速成为电机调速的新方式,并凭借开关频率高、低速运行稳定、动态[1-6][5-6]性能优良、效率高等优点,在电机调速中被普遍运用。
但很多文献提到的 PWM 信号,多采用软件 PWM调速,即通过单片机的中断实现,缺点是占系统资源,易受系统中断影响和干扰,造成系统不稳定。
本文将针对这一点,设计一种基于硬件 PWM 控制,调速时间更短的电机调速系统,并具有较好的稳定性能.一、电机控制系统的整体设计1。
1 系统整体设计原理图系统整体设计如图1所示,主要原理框图包括:LCD显示、按盘输入、测速模块、PWM调速模块四部分。
电路原理图如图2所示:图 1图21.2 PWM信号PWM信号的产生采用硬件PWM信号,即不采用中断实现PWM信号,而是利用单片机MPC82G516的PCA模式,PCA设置成PWM模式直接产生PWM信号。
频率取决于PCA定时器的时钟源,占空比取决于模块捕获寄存器CCAPNL与扩展的第9位ECAPNL的值。
由于使用9位比较,输出占空比可以真正实现0%到100%可调,占空比计算公式为:占空比=1—{ ECAPnH,[CCAPnH]}/256在电源电压 Ud 不变的情况下,电枢端电压的平均值取决于占空比η 的大小.通过改变η 的值可以改变电枢端电压的平均值,从而达到调速的目的。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于嵌入式系统的PWM的直流电机调速系统序言随着我国国民经济的快速增长,产业结构也随之不断调整。
先进的科学技术的出现为我国工业的快速发展提供了基础。
新技术的广泛使用,大大提高了工业的劳动生产率,为实现劳动密集型向技术密集型产业的转型和实现可持续性发展提供了强大的动力,同时也推动着我国经济的快速发展。
近些年来,以计算机技术,通讯技术、消费电子技术为主的电子信息技术的高速发展和国际互联网络(Internet)的广泛应用已经改变了人们的生活方式,世界各国都在为发展以计算机技术,通讯技术、消费电子技术为主要内容的信息产业制定宏伟的发展规划,以期望在21世纪的政治、经济和技术竞争中处于主动有利的地位。
信息技术对其他各产业的贡献越来越大,信息产业正逐渐成为其他产业的支柱。
信息产业的发展程度、信息流通、畅通与否已成为评价各个国家的经济发展水平的一个重要标准。
在人类步入全球信息化社会的进程中,全球性电子信息技术正在发挥着巨大的作用。
嵌入式系统是近年来发展最快的技术之一。
嵌入式系统与传统的单片机系统和 PC 平台相比,融合了两者的优点,既有单片机系统成本低、体积小、功耗低的特点,又具有PC平台的开发环境好、资源丰富、具备操作系统、用户界面友好的特点,因而在应用技术领域就有良好的发展前景。
以32位的ARM 芯片和高速大容量FPGA为核心的嵌入式系统不但充分发挥了以上特点,而且大大简化了系统设计,提高了集成度和可靠性。
现在的经济实力的竞争归根到底就是技术水平的竞争,技术水平也是衡量一个国家生产技术水平的重要标志之一。
那么学习新的技术当然就是适应发展的选择,在这一背景下,利用嵌入式系统大发展的机会,有必要系统地学习嵌入式系统的应用。
第一章绪论1.1嵌入式系统的概述在工业控制、通讯、仪器仪表等领域,嵌入式系统的蓬勃发展己经有目共睹。
嵌入式系统是什么?我们有必要在这里简单的介绍一下。
嵌入式系统是指用于执行独立功能的专用计算机系统。
它由包括微处理器、定时器、微控制器、存储器、传感器等一系列微电子芯片与器件,和嵌入在存储器中的微型操作系统、控制应用软件组成,共同实现诸如实时控制、监视、管理、移动计算、数据处理等各种自动化处理任务。
嵌入式系统以应用为中心,以微电子技术、控制技术、计算机技术和通讯技术为基础,强调硬件软件的协同性与整合性,软件与硬件可剪裁,以满足系统对功能、成本、体积和功耗等要求。
最简单的嵌入式系统仅有执行单一功能的控制能力,在唯一的ROM 中仅有实现单一功能的控制程序,无微型操作系统。
1.2嵌入式微处理器及其系统特点嵌入式系统的核心部件是嵌入式处理器,一般嵌入式处理器分成4类:嵌入式微处理器(EMPU)、嵌入式微控制器(MCU)、嵌入式DSP处理器(EDSP)、嵌入式片上系统(SOC)。
嵌入式系统的核心是嵌入式微处理器。
嵌入式微处理器一般具备以下 4个特点:1、对实时多任务有很强的支持能力,能完成多任务并且有较短的中断响应时间,从而使内部的代码和实时内核的执行时间减少到最低限度。
2、具有功能很强的存储区保护功能。
这是由于嵌入式系统的软件结构己模块化,而为了避免在软件模块之间出现错误的交叉作用,需要设计强大的存储区保护功能,同时也有利于软件诊断。
3、可扩展的处理器结构,能以最迅速地开发出满足应用的最高性能的嵌入式微处理器。
4、嵌入式微处理器必须功耗很低,尤其是用于便携式的无线及移动的计算和通信设备中靠电池供电的嵌入式系统更是如此。
嵌入式计算机系统与通用计算机系统相比具有以下特点:1、嵌入式系统通常是面向特定应用的嵌入式 CPU与通用型的 CPU最大不同就是嵌入式 CPU大多工作在为特定用户群设计的系统中,它通常都具有低功耗、体积小、集成度高等特点,能够把通用 CPU中许多由板卡完成的任务集成在芯片内部,从而有利于嵌入式系统设计趋于小型化,移动能力大大增强,与网络的结合也越来越紧密。
2、嵌入式系统是将先进的计算机技术、半导体技术和电子技术与各个行业的具体应用相结合后的产物。
这一点就决定了它必然是一个技术密集、资金密集、高度分散、不断创新的知识集成系统。
3、嵌入式系统的硬件和软件都必须高效率地设计,量体裁衣、去除冗余,力争在同样的硅片面积上实现更高的性能,这样才能在具体应用中对处理器的选择更具有竞争力。
4、嵌入式系统和具体应用有机地结合在一起,它的升级换代也是和具体产品同步进行,因此嵌入式系统产品一旦进入市场,具有较长的生命周期。
5、为了提高执行速度和系统可靠性,嵌入式系统中的软件一般都固化在存储器芯片或单片机本身中,而不是存贮于磁盘等载体中。
6、嵌入式系统本身不具备自举开发能力,即设计完成以后用户通常不能对其中的程序进行修改,必须有一套开发工具和环境才能进行开发。
1.3国内外嵌入式系统的发展现状随着信息化、智能化、网络化的发展,嵌入式系统技术也将获得广阔的发展空间。
以8位单片机(或微控制器,MCU)为核心的嵌入式系统早以广泛应用与各个领域,这些应用大多数还处于单机使用的嵌入式底层次阶段。
其特点是以MCU为核心,与一些简单的传感器及监测、伺服控制、指示和显示等设备配合,实现一定的测量、显示、信息处理及控制等功能。
虽然在一些工业控制、汽车电子和智能家居等多机应用中,为了实现多个MCU构成的系统间的信息交流,通常是利用CAN、RS-232和RS-485等总线将MCU 组网。
但这种应用空间有限,相关的通信协议也比较单一,并且孤立于Internet之外。
Internet已成为社会重要的基础信息设施,嵌入式系统必将要与Internet完美结合。
随着嵌入式设备与Internet的结合,手机、PDA、路由器和调制解调器等复杂的高端应用对嵌入式处理器的性能提出了更高的要求。
虽然以8位单片机为核心的嵌入式技术的不断发展,性能也不断提高,但由于其性能的局限性,已无法满足未来高性能嵌入式技术的发展需求。
目前在8位单片机上运行嵌入式操作系统尚有一定困难,因此,以32位处理器作为高性能嵌入式系统开发的核心已是嵌入式技术发展的必然趋势。
嵌入式微处理器具有体积小、重量轻、成本低和可靠性高的优点,是嵌入式系统的核心。
目前比较有影响的32位嵌入式处理器有ARM公司的ARM,Compaq公司的Alpha、HP公司的PA-RISC、IBM公司的PowerPC、MIPS公司的MIPS和Sun公司的Sparc等。
而ARM处理器具有高性能、低功耗和低成本等显著优点,已成为高性能、低功耗嵌入式微处理器的代名词,是目前32位、64位嵌入式处理器中应用最为广泛的一个系列。
ARM微处理器得到了众多半导体厂家和整机厂家的大力支持,全球有100多家IT 公司在采用ARM技术,20家最大的半导体厂家有19家是ARM的用户,包括TI、PHILIPS 和Intel等公司。
优良的性能和准确的市场定位极大地丰富了ARM资源,加速了基于ARM 核的面向各种应用系统芯片的开发应用。
如今,ARM公司已经成为业界的龙头老大,几乎所有的手机、移动设备、PDA都是用基于ARM核的系统芯片开发的。
为了顺应当今世界技术革新的潮流,了解、学习和掌握高性能嵌入式技术已经非常重要。
1.4 系统的设计任务1.4.1主要内容与技术要求了解嵌入式系统的概念、特点及应用,熟悉一种嵌入式处理器内核,并以此处理器为内核,采用PWM通道实现直流电机的调速,结合实际应用,选用合适的处理器,并设计完成电机调速系统,从而掌握基本的嵌入式开发流程。
1.4.2 主要的技术指标直流电机调速系统:1、直流电机调速采用PWM调速直流电机额定电压 12V 转速 3500转/分2、选择合适的处理器芯片3、设计基于处理器的外围电路及电机电路第二章系统的总体方案设计2.1 嵌入式微处理器随着社会的发展,互联网的普及,对嵌入式系统的要求己经越来越高.现在出现的信息家用电器,如:掌上电脑、PDA、移动设备等嵌入式设备都需要网络的支持、较快的运行速度和复杂的处理能力,对于早期的8/16位的单片机来说是很困难的。
由于集成电路技术的科技进步,电子器件的价格不断下降,使32位微处理器己经在各类应用中得到了广泛普及应用.各种32位嵌入式大展身手,对于我们产品的选择范围也非常广泛。
自然一些性能高的芯片得到人们的青睐。
2.1.1常用的嵌入式处理器[5]嵌入式微处理器有许多种流行的处理器核,芯片生产厂家一般都基于这些处理器核生产不同型号的芯片。
下面介绍几种常用的嵌入式处理器。
1.MIPS系列MIPS是Microprocessor without Interlocked Pipeline Stages的缩写,是一种处理器内核标准,它是由MIPS技术公司开发的。
MIPS技术公司是一家设计制造高性能、高档次的嵌入式32位和64 位处理器的厂商,在RISC处理器方面占有重要地位。
MIPS 技术公司设计RISC处理器始于20世纪80年代初,1986年推出82000处理器,1988年推出83000处理器。
自1991年推出第一款64位商用微处理器84000之后,又陆续88000,810000和812000等型号。
后来,MIPS公司的战略发生变化,把重点放在嵌入式系统。
1999年公司发布MIPS32和MIPS64架构标准,为未来MIPS处理器的开发奠定了基础。
新的架构集成了原来所有的MIPS指令集.并且增加了许多更强大的功能。
不久以后,MIPS公司又相继开发出高性能、低功耗的32位处理器内核(core)MIPS324 Kc与高性能64位内核MIPS645 Kc以及相应的新版本及未来64位MIPS6420Kc处理器内核。
MIPS 技术公司既开发MIPS处理器结构内核,又生产基于MIPS的32位/64位嵌入式微处理器芯片。
MIPS芯片的定位很广,在高端它有64位的20KC系列,在低端它也有smartMIPS,其使用范围也是非常广泛的。
2.PowerPC系列PowerPC是IBM和Motolora共同研制出来的一套处理器标准。
其架构特点是可伸缩性好,方便灵活。
PowerPC处理器品种很多,应用范围非常广泛,既有通用的PC处理器用于高端工作站、服务器与桌面计算机,也有嵌入式控制器与内核设计应用于消费类电子产品、通信领域等方面. 目前PowerPC独立微处理器与嵌入式微处理器的主频从25MHz-70OMHz不等,产品能量消耗、体积、整合程度、价格差异悬殊,主要产品模块有IBM公司350MHz-70OMHz的PowerPC750CX和750CXe,以及主频400MHz的PowerPC440GP。
其嵌入式处理器内核可以用于各种集成的片上系统SOC设备。
在通信、金融等行业具有广泛的应用,主要嵌入式芯片有IBM公司开发的PowerPC405GP. Motorola公司的MPC823等。