伺服电机的选型计算及应用案例介绍讲课资料
伺服电机的选型计算及应用案例介绍

伺服电机的选型计算及应用案例介绍伺服电机是一种能够精确控制转速和位置的电动机,广泛应用于工业自动化领域。
选型计算是确定伺服电机规格和性能的过程,通常涉及到转矩、转速、功率、惯量等参数的综合考虑。
1.确定负载要求:首先需要明确伺服电机所驱动的负载的要求,包括所需转矩、转速和精度等。
2.计算转矩需求:根据负载要求,可以通过转矩计算公式来估算所需的转矩。
常用的转矩计算公式为:转矩=负载惯量x加速度角加速度+负载转矩其中,负载惯量是指负载的惯性矩,加速度角加速度是指负载加速度的转矩。
3.计算转速需求:根据负载要求,可以通过转速计算公式来估算所需的转速。
常用的转速计算公式为:转速=转矩/转矩常数其中,转矩常数是伺服电机的特性参数,代表单位转矩所需要的电压或电流。
4.确定功率需求:根据转矩和转速需求,可以计算出所需的功率。
功率可以通过转速和转矩的乘积来计算。
功率=转矩x转速5.确定惯量需求:根据负载的惯性矩和转矩需求,可以计算出所需的惯性矩。
惯性矩可以通过负载的质量和尺寸来计算。
以上是伺服电机选型计算的基本步骤,具体的选型还需要考虑其他因素,如环境温度、耐用性、可靠性等。
下面以一个应用案例来介绍伺服电机的选型计算。
假设有一个机械臂需要驱动,臂长为1米,质量为10千克。
机械臂需要能够承受10牛米的转矩,并以每分钟100转的速度旋转。
根据这些要求,可以使用以下公式计算伺服电机的规格和性能。
负载惯量=质量x(臂长^2)转矩需求=负载惯量x加速度角加速度+负载转矩加速度角加速度=转速/时间转速=100转/分钟负载转矩=10牛米根据以上参数,可以计算出负载惯量、加速度角加速度、转矩需求等。
假设加速时间为1秒,则有:加速度角加速度=(100转/分钟)/(60秒/分钟)/(1秒)=1.67转/秒^2负载惯量=10千克x(1米^2)=10千克·米^2转矩需求=10千克·米^2x(1.67转/秒^2)+10牛米=26.7牛米根据转矩需求和伺服电机的特性参数,可以选择合适的伺服电机。
伺服电机计算选择应用实例

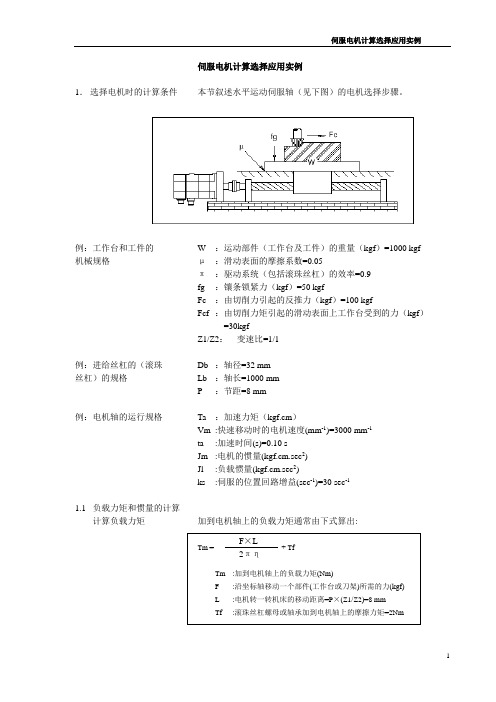
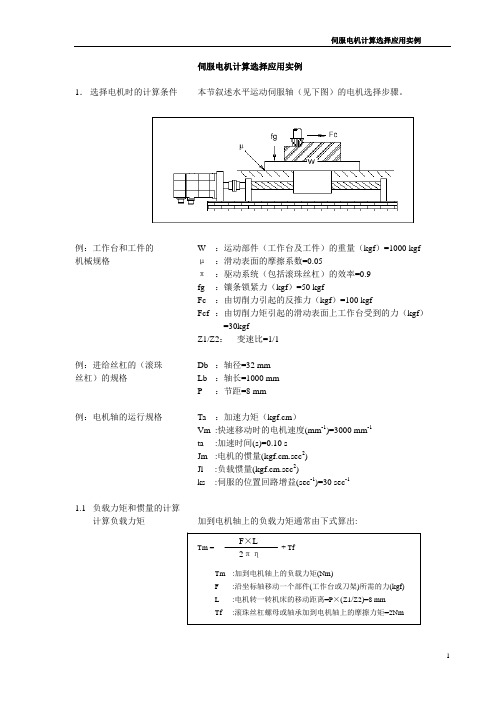
伺服电机计算选择应用实例1. 选择电机时的计算条件 本节叙述水平运动伺服轴(见下图)的电机选择步骤。
例:工作台和工件的 W :运动部件(工作台及工件)的重量(kgf )=1000 kgf 机械规格 μ :滑动表面的摩擦系数=0.05π :驱动系统(包括滚珠丝杠)的效率=0.9 fg :镶条锁紧力(kgf )=50 kgfFc :由切削力引起的反推力(kgf )=100 kgfFcf :由切削力矩引起的滑动表面上工作台受到的力(kgf )=30kgfZ1/Z2: 变速比=1/1 例:进给丝杠的(滚珠 Db :轴径=32 mm 丝杠)的规格 Lb :轴长=1000 mm P :节距=8 mm例:电机轴的运行规格 Ta :加速力矩(kgf.cm )Vm :快速移动时的电机速度(mm -1)=3000 mm -1 ta :加速时间(s)=0.10 sJm :电机的惯量(kgf.cm.sec 2) Jl :负载惯量(kgf.cm.sec 2)ks :伺服的位置回路增益(sec -1)=30 sec -1 1.1 负载力矩和惯量的计算 计算负载力矩 加到电机轴上的负载力矩通常由下式算出:Tm = + TfTm :加到电机轴上的负载力矩(Nm) F :沿坐标轴移动一个部件(工作台或刀架)所需的力(kgf) L :电机转一转机床的移动距离=P ×(Z1/Z2)=8 mmTf:滚珠丝杠螺母或轴承加到电机轴上的摩擦力矩=2Nm无论是否在切削,是垂直轴还是水平轴,F 值取决于工作台的重量,摩擦系数。
若坐标轴是垂直轴,F 值还与平衡锤有关。
对于水平工作台,F 值可按下列公式计算: 不切削时: F = μ(W+fg ) 例如: F=0.05×(1000+50)=52.5 (kgf) Tm = (52.5×0.8) / (2×μ×0.9)+2=9.4(kgf.cm)= 0.9(Nm)切削时:F = Fc+μ(W+fg+Fcf) 例如: F=100+0.05×(1000+50+30)=154(kgf) Tmc=(154×0.8) / (2×μ×0.9)+2=21.8(kgf.cm)=2.1(Nm)为了满足条件1,应根据数据单选择电机,其负载力矩在不切削时应大于0.9(Nm ),最高转速应高于3000(min -1)。
伺服电机计算选择应用实例全解
伺服电机计算选择应用实例1. 选择电机时的计算条件 本节叙述水平运动伺服轴(见下图)的电机选择步骤。
例:工作台和工件的W :运动部件(工作台及工件)的重量(kgf )=1000 kgf 机械规格 μ :滑动表面的摩擦系数=0.05π :驱动系统(包括滚珠丝杠)的效率=0.9 fg :镶条锁紧力(kgf )=50 kgfFc :由切削力引起的反推力(kgf )=100 kgfFcf:由切削力矩引起的滑动表面上工作台受到的力(kgf ) =30kgfZ1/Z2: 变速比=1/1例:进给丝杠的(滚珠 Db :轴径=32 mm 丝杠)的规格 Lb :轴长=1000 mm P :节距=8 mm例:电机轴的运行规格 Ta :加速力矩(kgf.cm )Vm :快速移动时的电机速度(mm -1)=3000 mm -1 ta :加速时间(s)=0.10 sJm :电机的惯量(kgf.cm.sec 2) Jl :负载惯量(kgf.cm.sec 2)ks :伺服的位置回路增益(sec -1)=30 sec -11.1 负载力矩和惯量的计算 计算负载力矩 加到电机轴上的负载力矩通常由下式算出:Tm = + Tf Tm :加到电机轴上的负载力矩(Nm) F :沿坐标轴移动一个部件(工作台或刀架)所需的力(kgf) L :电机转一转机床的移动距离=P ×(Z1/Z2)=8 mmTf:滚珠丝杠螺母或轴承加到电机轴上的摩擦力矩=2NmF ×L2πη无论是否在切削,是垂直轴还是水平轴,F值取决于工作台的重量,摩擦系数。
若坐标轴是垂直轴,F值还与平衡锤有关。
对于水平工作台,F值可按下列公式计算:不切削时:F = μ(W+fg)例如:F=0.05×(1000+50)=52.5 (kgf)Tm = (52.5×0.8) / (2×μ×0.9)+2=9.4(kgf.cm)= 0.9(Nm)切削时:F = Fc+μ(W+fg+Fcf)例如:F=100+0.05×(1000+50+30)=154(kgf)Tmc=(154×0.8) / (2×μ×0.9)+2=21.8(kgf.cm)=2.1(Nm)为了满足条件1,应根据数据单选择电机,其负载力矩在不切削时应大于0.9(Nm),最高转速应高于3000(min-1)。
《伺服电机的选型》课件

考虑工作环境的温度、湿度、尘埃等条件,选择能够 在恶劣环境下稳定运行的伺服电机。
规格匹配
电机尺寸
根据安装空间和实际需求,选择合适的电机 尺寸。
电机重量
对于需要轻量化的应用,应考虑电机的重量 。
接口兼容性
确保所选伺服电机与控制系统和驱动器之间 的接口兼容。
技术评估
技术规格比较
对比不同品牌和型号伺服电机的技术规格,评 估其性能优劣。
可能是由于散热不良、负载过大或润 滑不足,应加强散热、减轻负载或增 加润滑。
运行噪音
可能是轴承损坏、螺丝松动或电气问 题,应更换轴承、紧固螺丝或检查电 气线路。
振动过大
可能是机械不平衡、安装不正确或负 载不均,应重新平衡机械、纠正安装 或调整负载分布。
无法启动
可能是电源故障、控制信号问题或机 械卡阻,应检查电源、控制信号或消 除机械障碍。
产品测试报告
查看第三方测试报告或制造商提供的产品测试 数据,了解电机的实际性能表现。
客户评价
参考其他客户的评价和使用经验,了解电机的可靠性和售后服务。
价格比较
成本效益分析
综合考虑电机的性能、品牌、技术支持等因素,评估其性价比。
报价与谈判
向供应商询价,了解价格优惠和谈判空间,争取获得更好的采购条 件。
THANKS FOR WATCHING
感谢您的观看
防护等级与环境适应性:分析各品牌伺服 电机的防水、防尘等防护等级,以及在各 种恶劣环境下的稳定运行能力。
应用案例分享
案例1
数控机床:介绍品牌A的伺服电机 在数控机床中的应用案例,突出 其在高精度加工和高效生产方面 的优势。
案例2
包装机械:分享品牌B的伺服电机 在包装机械中的成功应用案例, 强调其在提高包装效率和降低成 本方面的作用。
伺服电机计算选择应用实例

伺服电机计算选择应用实例1. 选择电机时的计算条件 本节叙述水平运动伺服轴(见下图)的电机选择步骤。
例:工作台和工件的 W :运动部件(工作台及工件)的重量(kgf )=1000 kgf 机械规格 μ :滑动表面的摩擦系数=0.05π :驱动系统(包括滚珠丝杠)的效率=0.9 fg :镶条锁紧力(kgf )=50 kgfFc :由切削力引起的反推力(kgf )=100 kgfFcf :由切削力矩引起的滑动表面上工作台受到的力(kgf )=30kgfZ1/Z2: 变速比=1/1例:进给丝杠的(滚珠 Db :轴径=32 mm 丝杠)的规格 Lb :轴长=1000 mm P :节距=8 mm例:电机轴的运行规格 Ta :加速力矩(kgf.cm )Vm :快速移动时的电机速度(mm -1)=3000 mm -1ta :加速时间(s)=0.10 sJm :电机的惯量(kgf.cm.sec 2)Jl :负载惯量(kgf.cm.sec 2)ks:伺服的位置回路增益(sec -1)=30 sec-11.1 负载力矩和惯量的计算 计算负载力矩 加到电机轴上的负载力矩通常由下式算出:Tm = + Tf Tm :加到电机轴上的负载力矩(Nm) F :沿坐标轴移动一个部件(工作台或刀架)所需的力(kgf) L:电机转一转机床的移动距离=P ×(Z1/Z2)=8 mmTf :滚珠丝杠螺母或轴承加到电机轴上的摩擦力矩=2NmF ×L 2πη无论是否在切削,是垂直轴还是水平轴,F值取决于工作台的重量,摩擦系数。
若坐标轴是垂直轴,F值还与平衡锤有关。
对于水平工作台,F值可按下列公式计算:不切削时:F = μ(W+fg)例如:F=0.05×(1000+50)=52.5 (kgf)Tm = (52.5×0.8) / (2×μ×0.9)+2=9.4(kgf.cm)= 0.9(Nm)切削时:F = Fc+μ(W+fg+Fcf)例如:F=100+0.05×(1000+50+30)=154(kgf)Tmc=(154×0.8) / (2×μ×0.9)+2=21.8(kgf.cm)=2.1(Nm)为了满足条件1,应根据数据单选择电机,其负载力矩在不切削时应大于0.9(Nm),最高转速应高于3000(min-1)。
伺服电机讲解2讲课文档

中山少微自动化科技有限公司
2 伺服电机基本结构及原理
2.1 结构
交流电机
交流电机 电源线
编码器
现在十二页,总共五十五页。
编码器信
号输出线
中山少微自动化科技有限公司
2 伺服电机基本结构及原理
结构
交流电机
机械负载轴
现在十三页,总共五十五页。
减速齿轮
中山少微自动化科技有限公司
2 伺服电机基本结构及原理
ic Im sint
if Im sint 90
if Ic
组的电流UC相位上彼此相
差900幅值彼此相等,这样
的两个电流称为两相对称
电流,用数学式表示为
现在二十二页,总共五十五页。
中山少微自动化科技有限公司
3.1旋转磁场的产生
控制绕组
励磁绕组
UF1
UC1
UC2
UF2
当两相对称电流通入两相对称绕组时,在电机内就产生一个旋 转磁场。当电流变化一个周期时,旋转磁场在空间转了一中山少微圈自动化。科技有限公司
交流伺服电机驱动器
图 2-2 交流伺服电机系统接线示意图 现在三十七页,总共五十五页。
中山少微自动化科技有限公司
5.3交流伺服电机系统应用
5.3.1交流伺服电机系统结构
PC机
运动控制器
I/O 电 数据信号 路
速度信号 DAC 0/1
Pulse 0/1
使能信号
DO 21/22
P9-0/2
驱 控制
电压
表示的是一台两极的电机,即极对数P=1。对两极电机而言,
电流每变化一个周期,磁场旋转一圈,因而当
电源频率f=400 Hs,即每秒变化400个周期时,磁场每秒应当
《伺服电机精讲》课件

添加标题
添加标题
添加标题
添加标题
按照功率分类:大功率伺服电机、 小功率伺服电机
按照用途分类:通用伺服电机、 专用伺服电机
应用领域概述
工业自动化:用 于控制机械设备
的运动和位置
机器人技术:用 于控制机器人的
运动和位置
数控机床:用于 控制机床的加工
精度和速度
医疗设备:用于 控制医疗设备的
运动和位置
航空航天:用于 控制航天器的运
06
伺服电机的未来发展
伺服电机的发展趋势
智能化:通过人工智能技术实现伺服电机的自动控制和优化 节能化:提高伺服电机的能效比,降低能耗 微型化:减小伺服电机的体积和重量,提高其便携性和灵活性 集成化:将伺服电机与其他设备集成,提高系统的整体性能和可靠性
ቤተ መጻሕፍቲ ባይዱ
伺服电机的新技术发展
智能化:通过人 工智能技术实现 伺服电机的自动 控制和优化
转速范围:确定电机的转速范围,如低速、 中速、高速等
控制方式:确定电机的控制方式,如开环、 闭环、半闭环等
精度要求:确定电机的精度要求,如位置、 速度、力矩等
环境条件:考虑电机的工作环境,如温度、 湿度、振动等
成本预算:考虑电机的成本预算,选择合 适的品牌和型号
伺服电机的安装与调试
安装步骤:检查电机、安装底座、固定螺丝、连接电缆等 调试步骤:检查电机、设置参数、测试运行、调整参数等 注意事项:确保电机安装牢固、电缆连接正确、参数设置合理等 常见问题:电机无法启动、运行不稳定、噪音过大等及解决方法
伺服电机的维护与保养
清洁保养:定期清洁电机, 保持清洁,避免灰尘、油污 等影响电机性能
定期检查:检查电机的运行 状态,如温度、振动、噪音 等
伺服电机功率计算选型案例PPT演示文稿
15
举例计算2
M
1:R2
D
2021/3/10
1:R1
已知:负载重量M=50kg,同步带轮直 径D=120mm,减速比R1=10,R2=2, 负载与机台摩擦系数µ=0.6,负载最高 运动速度30m/min,负载从静止加速到 最高速度时间200ms,忽略各传送带轮 重量,驱动这样的负载最少需要多大功 率电机?
2021/3/10
3
3) 力矩的單位:S.I. 制中的單位為 牛頓‧公尺(N‧m)
4) 力矩的方向與符號:繞固定軸轉動的物體,力矩可使物體 產生逆時鐘方向,或順時鐘方向的轉動。因此力矩為一維 向量。力矩符號規則一般選取如下:
正號:逆時鐘方向。 負號:順時鐘方向。
2. 轉動方程式:考慮一繞固定軸轉動的
16
举例计算2
1. 计算折算到电机轴上的负载惯量 JL = M * D2 / 4 / R12 = 50 * 144 / 4 / 100 = 18 kg.cm2 按照负载惯量 < 3倍电机转子惯量JM的原则 JM > 6 kg.cm2
2) 力矩的定義:考慮開門的情況,如右 圖,欲讓門產生轉動,必須施一外力 F 。施力點離轉軸愈遠愈容易使門轉 動。而外力平形於門面的分力對門的 轉動並無效果,只有垂直於門面的分 力能讓門轉動。綜合以上因素,定義 力矩,以符號 τ表示。
F
r
θ
r sin 作用線
r F s i n F ( r s i n ) 力 量 力 臂
JK=
1 8
×MK ×(D02- D12)
经过减速机之后的转动惯量
JL=
JK R²
9
惯量计算
二、负载直线运动时惯量计算 JL(㎏ • ㎡)
伺服电机功率计算选型课件

案例三:搬运机械臂的伺服电机应用
总结词
大负载、高精度定位
详细描述
搬运机械臂需要承受较大负载并实现高精度定位,伺服电机能够提供足够的扭 矩和精确的控制能力,确保机械臂的稳定运行和精确操作。
伺服电机维护与保
05
养
伺服电机的日常维护
01
02
03
每日检查
检查伺服电机是否有异常 声音、振动或发热,检查 电缆和连接是否松动或破 损。
清洁
定期清除电机上的灰尘和 杂物,保持电机清洁,以 防止灰尘和杂物对电机运 行造成影响。
油脂涂抹
根据需要,在电机的轴承 和齿轮上涂抹适量的润滑 油脂,以减少磨损和摩擦 。
伺服电机的定期保养
定期更换润滑油
根据电机制造商的推荐, 定期更换电机的润滑油, 以保证电机正常运行。
检查绝缘电阻
定期检查电机的绝缘电阻 ,以确保电机电气性能正 常。
伺服电机的工作原理
伺服电机通过将输入的电压或电流信 号转换成转矩或转速,驱动负载进行 转动。
伺服电机内部通常包含一个旋转的转 子,以及一个固定的定子,通过电磁 感应原理实现能量的转换和传递。
伺服电机的分类与特点
根据使用的电源类型,伺服电 机可以分为直流伺服电机和交
流伺服电机两大类。
直流伺服电机具有精度高、 调速范围广、低速稳定性好 等优点,但需要定期更换电
案例一:数控机床的伺服电机应用
总结词
高精度、高效率
详细描述
数控机床需要高精度和高效率的加工能力,伺服电机能够提供稳定的扭矩和转速,确保加工过程的精确性和高效 性。
案例二:包装机械的伺服电机应用
总结词
快速响应、高可靠性
详细描述
包装机械需要快速响应和高可靠性的运行能力,伺服电机能够迅速启动和停止,适应各种包装工艺需 求,确保生产线的稳定性和效率。
伺服电机选型计算实例
1
·注
伺服电机计算选择应用实例
无论是否在切削,是垂直轴还是水平轴,F 值取决于工作台的重量, 摩擦系数。若坐标轴是垂直轴,F 值还与平衡锤有关。对于水平工 作台,F 值可按下列公式计算:
不切削时: F = μ(W+fg) 例如: F=0.05×(1000+50)=52.5 (kgf) Tm = (52.5×0.8) / (2×μ×0.9)+2=9.4(kgf.cm) = 0.9(Nm)
Ta =
Vm × 2π× 1
60
ta
×Jm×(1-e-ks。ta)+
+ Vm × 2π× 1
60
ta
×JL×(1-e-ks。ta)÷η
1 Vr = Vm×{1- Ta·ks
(1- e-ks。ta )}
Ta :加速力矩(kgf·cm) Vm :电机快速移动速度(min-1) ta :加速时间(sec) Jm :电机的惯量(kgf.cm.s2) JL :负载的惯量(kgf.cm.s2) Vr :加速力矩开始下降的速度(与 Vm 不同) (min-1) Ks :位置回路的增益(sec-1) η :机床的效率
切削时: F = Fc+μ(W+fg+Fcf) 例如: F=100+0.05×(1000+50+30)=154(kgf) Tmc=(154×0.8) / (2×μ×0.9)+2=21.8(kgf.cm) =2.1(Nm)
为了满足条件 1,应根据数据单选择电机,其负载力矩在不切削时 应大于 0.9(Nm),最高转速应高于 3000(min-1)。考虑到加/减速, 可选择α2/3000(其静止时的额定转矩为 2.0 Nm)。
富士伺服电机选型计算资料
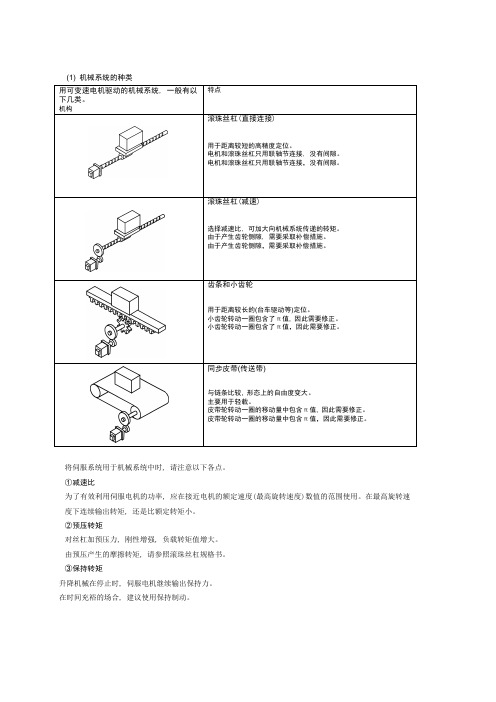
(1) 机械系统的种类特点用可变速电机驱动的机械系统, 一般有以下几类。
机构滚珠丝杠(直接连接)用于距离较短的高精度定位。
电机和滚珠丝杠只用联轴节连接, 没有间隙。
电机和滚珠丝杠只用联轴节连接,没有间隙。
滚珠丝杠(减速)选择减速比, 可加大向机械系统传递的转矩。
由于产生齿轮侧隙, 需要采取补偿措施。
由于产生齿轮侧隙,需要采取补偿措施。
齿条和小齿轮用于距离较长的(台车驱动等)定位。
小齿轮转动一圈包含了π值, 因此需要修正。
小齿轮转动一圈包含了π值,因此需要修正。
同步皮带(传送带)与链条比较, 形态上的自由度变大。
主要用于轻载。
皮带轮转动一圈的移动量中包含π值, 因此需要修正。
皮带轮转动一圈的移动量中包含π值,因此需要修正。
将伺服系统用于机械系统中时, 请注意以下各点。
①减速比为了有效利用伺服电机的功率, 应在接近电机的额定速度(最高旋转速度)数值的范围使用。
在最高旋转速度下连续输出转矩, 还是比额定转矩小。
②预压转矩对丝杠加预压力, 刚性增强, 负载转矩值增大。
由预压产生的摩擦转矩, 请参照滚珠丝杠规格书。
③保持转矩升降机械在停止时, 伺服电机继续输出保持力。
在时间充裕的场合, 建议使用保持制动。
机构特点链条驱动多用于输送线上。
必须考虑链条本身的伸长并采取相应的措施。
在减速比比较大的状态下使用, 机械系统的移动速度小。
多用于输送线上。
必须考虑链条本身的伸长并采取相应的措施。
在减速比比较大的状态下使用,机械系统的移动速度小。
进料辊将板带上的材料夹入辊间送出。
由于未严密确定辊子直径, 在尺寸长的物件上将产生误差, 需进行π补偿。
如果急剧加速, 将产生打滑, 送出量不足。
如果急剧加速,将产生打滑,送出量不足。
转盘分度转盘的惯性矩大, 需要设定足够的减速比。
转盘的转速低, 多使用蜗轮蜗杆。
转盘的转速低,多使用蜗轮蜗杆。
主轴驱动在卷绕线材时, 由于惯性矩大, 需要设定够的减速比。
在等圆周速度控制中, 必须把周边机械考虑进来研究。
伺服电机选型案例

伺服电机选型案例伺服电机功率计算选型例子伺服电机功率计算选型例子(新手必看,经典案例分析)伺服电机选型也有相应的规律和公式可循的。
最常见的机械传动结构有同步带,齿轮齿条,丝杆等。
以同步带为例,需要计算的参数有电机转速,电机力矩,转动惯量。
第一,电机额定转速N=(v/2πr)*i,启动瞬间需要的拉力F=(M+m1-m2)a+δ(M+m1-m2)g(水平),F=(M+m1-m2)a+δ(M+m1-m2)g+(M+m1-m2)g(垂直),T扭矩=F*R。
T电机=T扭矩/机械减速比n,电机功率=N*T 电机/10,启动惯量J=1/2mR2,电机惯量J电机=J/减速比的平方n2/惯量比i。
第二,同步带轮直径D=100mm、提升机载货台总重M=30kg、货物总重m1=10kg,配重m2=25kg,提升滚动摩擦系数取δ=0.03、加速度a=2m/S2、提升速度v=3m/s。
减速机减速比i=5,电机额定转速n=(v/2πr)*i=3/(2*3.14*0.05)*5*60=2866r/min,启动瞬间需要的拉力F=(M+m1-m2)a+&delta,(M+m1-m2)g+(M+m1-m2)g=(30+10-25)*2+0.03(30+10-25)*10+(30+10-25)*10=184.5N。
T扭矩=F*R=184.5*0.05=9.225Nm,折算电机需要扭矩T1=9.225Nm/5=1.85Nm,折算电机功率P1=2866*1.85/10=0.5KW。
启动惯量J=1/2mR2=0.5*(10+30+25)*0.0025=0.08125kgm2,折算电机需要惯量J1=0.08125/25=0.00325kgm2,根据经验值取惯量比=10,则实际J电=J1/10=0.000325kgm2。
经计算电机至少满足以下条件下面看下1.2千瓦3000RPM,4牛米的电机的惯量是2.98*10-4kgm2。
所以可以选择80ST-M04030的电机。
伺服电机计算选择应用实例

伺服电机计算选择应用实例1.选择电机时的计算条件本节叙述水平运动伺服轴(见下图)的电机选择步骤。
例:工作台和工件的W :运动部件(工作台及工件)的重量(kgf)=1000 kgf 机械规格μ:滑动表面的摩擦系数=0.05π:驱动系统(包括滚珠丝杠)的效率=0.9fg :镶条锁紧力(kgf)=50 kgfFc :由切削力引起的反推力(kgf)=100 kgfFcf :由切削力矩引起的滑动表面上工作台受到的力(kgf)=30kgfZ1/Z2:变速比=1/1例:进给丝杠的(滚珠Db :轴径=32 mm丝杠)的规格Lb :轴长=1000 mmP :节距=8 mm例:电机轴的运行规格Ta :加速力矩(kgf.cm)Vm :快速移动时的电机速度(mm-1)=3000 mm-1ta :加速时间(s)=0.10 sJm :电机的惯量(kgf.cm.sec2)Jl :负载惯量(kgf.cm.sec2)ks :伺服的位置回路增益(sec-1)=30 sec-11.1 负载力矩和惯量的计算 计算负载力矩 加到电机轴上的负载力矩通常由下式算出:Tm = + TfTm :加到电机轴上的负载力矩(Nm) F :沿坐标轴移动一个部件(工作台或刀架)所需的力(kgf) L:电机转一转机床的移动距离=P ×(Z1/Z2)=8 mmTf :滚珠丝杠螺母或轴承加到电机轴上的摩擦力矩=2Nm无论是否在切削,是垂直轴还是水平轴,F 值取决于工作台的重量,摩擦系数。
若坐标轴是垂直轴,F 值还与平衡锤有关。
对于水平工作台,F 值可按下列公式计算: 不切削时:F = μ(W+fg )例如: F=0.05×(1000+50)=52.5 (kgf)Tm = (52.5×0.8) / (2×μ×0.9)+2=9.4(kgf.cm)= 0.9(Nm)切削时:F = Fc+μ(W+fg+Fcf) 例如:F=100+0.05×(1000+50+30)=154(kgf)Tmc=(154×0.8) / (2×μ×0.9)+2=21.8(kgf.cm)=2.1(Nm)为了满足条件1,应根据数据单选择电机,其负载力矩在不切削时应大于0.9(Nm ),最高转速应高于3000(min -1)。
伺服电机选型计算软件讲课教案
选定电机的额定转矩×0.8 比换算到电机轴负载转矩 大的电机N.m
TMx0.8>TL
* 此值因各系列而异,请加以注 意。
⑦加减速 转矩的计 算
加减速转矩TA
0.5096 > 0.165 N.m
⑧瞬时最 大转矩、 有效转矩 的计算
必要的瞬时最大转矩为T1
有效转矩Trms为
④负载转 矩的计算
对摩擦力的转矩Tw
7.80E-03 N.m
换算到电机轴负载转矩TL=Tw
⑤旋转数 的计算
转数N
⑥电机的 初步选定 [选自 OMNUC U 系列的初 步选定举 例]
N=60V/P.G
选定电机的转子·惯量为负载的 1/30*以上的电机
JM≥JL/30
7.80E-03 N.m 1800 r/min
初步
选择
定
R88M
-
U200
30(J
m=
根据
R88M
-
7.8E-03
U200 30的
额定
转矩
Tm=
1.23E-05
0.637
(N.m )
×
[适
1.23E-05
用的 惯量
比
=30]
0.5096 N.M
1.528 N.M
3000
r/mi n
条件满足 条件满足
条件满足 条件满足
条件满足
T1=TA+TL T2=TL T3=TL-TA
0.1726 N.m 0.0078 N.m -0.1570 N.m
0.095 N.m
⑨讨论 负载惯 0.095 N.m
≦[电机 的转子惯 量JM
﹤[电机 的额定转 矩
伺服电机选型计算及案例(傻瓜式)讲课讲稿
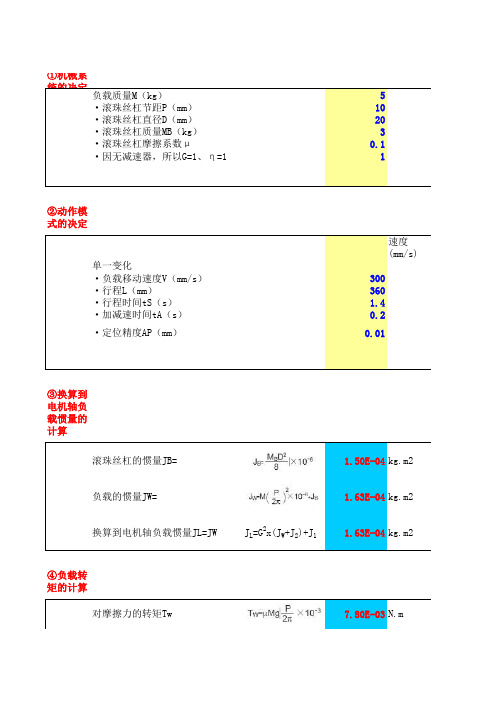
统的决定
负载质量M(kg)
5
·滚珠丝杠节距P(mm)
10
·滚珠丝杠直径D(mm)
20
·滚珠丝杠质量MB(kg)
3
·滚珠丝杠摩擦系数μ
0.1
·因无减速器,所以G=1、η=1
1
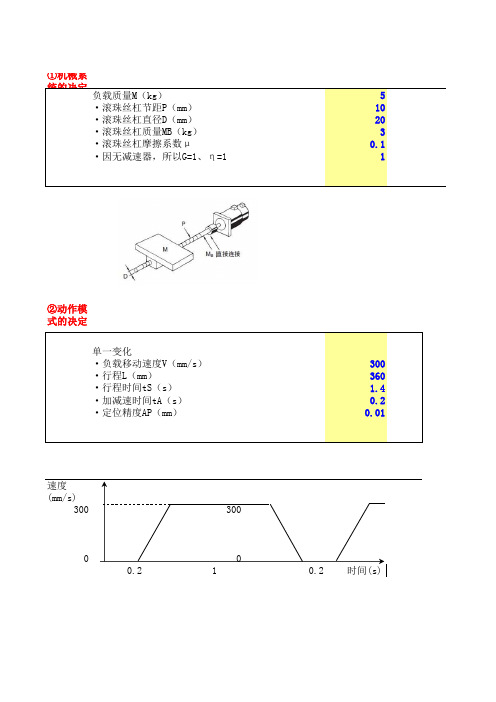
②动作模 式的决定
单一变化 ·负载移动速度V(mm/s) ·行程L(mm) ·行程时间tS(s) ·加减速时间tA(s) ·定位精度AP(mm)
#REF!
N.m
0.1726 N.m
1800 r/min 1000 (脉冲/转)
﹤[电 机的额 定转矩 ﹤[电 机的瞬 时最大 转矩 ≦[电 机的额 定转数 U系列 的编码
初步 选择 定 R88M U200 30(J m=
1.23E-05
根据
R88M
-
7.8E-03
U200 30的
额定
转矩
Tm=
0.5096 > 7.8E-03
0.165 N.m
0.1726 N.m 0.0078 N.m -0.1570 N.m #REF! N.m
⑨讨论 负载惯量JL
有效转矩Trms 瞬时最大转矩T1 必要的最大转数N 编码器分辨率R=P.G/AP.S
1.63E-04 kg.m2
≦[电 机的转 子惯量 JM
速度 (mm/s)
300
0 0.2
300
0 1
300 360 1.4 0.2 0.01
0.2 时间(s)
③换算到 电机轴负 载惯量的 计算
滚珠丝杠的惯量JB=
1.50E-04 kg.m2
负载的惯量JW=
1.63E-04 kg.m2
换算到电机轴负载惯量JL=JW
伺服电机选型计算及案例(傻瓜式)讲课讲稿
0.637
(N.m )
×
[适
1.23E-05
用的 惯量
比
=30]
0.5096 N.M
1.528 N.M
3000
r/mi n
条件满足
条件满足 条件满足 条件满足 条件满足
①机械系
统的决定
负载质量M(kg)
5
·滚珠丝杠节距P(mm)
10
·滚珠丝杠直径D(mm)
20
·滚珠丝杠质量MB(kg)
3
·滚珠丝杠摩擦系数μ
0.1
·因无减速器,所以G=1、η=1
1
②动作模 式的决定
单一变化 ·负载移动速度V(mm/s) ·行程L(mm) ·行程时间tS(s) ·加减速时间tA(s) ·定位精度AP(mm)
④负载转 矩的计算
对摩擦力的转矩Tw
换算到电机轴负载转矩TL=Tw
7.80E-03 N.m 7.80E-03 N.m
⑤旋转数 的计算
转数N
⑥电机的 初步选定 [选自 OMNUC U 系列的初 步选定举 例]
N=60V/P.G
1800 r/min
选定电机的转子·惯量为负载的 1/30*以上的电机
JM≥JL/30
速度 (mm/s)
300
0 0.2
300
0 1
300 360 1.4 0.2 0.01
0.2 时间(s)
③换算到 电机轴负 载惯量的 计算
滚珠丝杠的惯量JB=
1.50E-04 kg.m2
负载的惯量JW=
1.63E-04 kg.m2
换算到电机轴负载惯量JL=JW
JL=G2x(JW+J2)+J1
1.63E-04 kg.m2
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
五.和选择相关的项目说明
1.转矩
a 峰值转矩 运转过程中(主要是加减速时)电机所需的最 大转矩,通常为电机最大转矩的80%以下。
b 移动转矩 电机长时间运转所需的转矩。通常为电机的额 定转矩的80%以下。
各机构移动转矩的计算公式:
c 有效转矩 运转、停止全过程所需转矩的平方平均值的单 位时间数值,通常为电机的额定转矩的80%以 下。
2.与转动惯量有关的因素:
1.刚体的总质量 2.质量分布 3.转轴的位置
3.转动惯量的计算: (1)单个质点的转动惯量: J=mr2
(2)质量离散分布刚体的转动惯量:
J m jrj2 m1r12 m2r22 j
r2 m2
(3)质量连续分布刚体的转动惯量:r1来自m1r3 m3转轴
J r2dm dm:质量元
1.滚珠丝杆的质量: Bw=ρxV=7.9*103*π(0.02/2)2*0.5
=1.24kg
2.负载部分的惯量:
JL=JC+JB=JC+BW*BD2/8+WA*BP2/4π2 =0.00001+(1.24*0.022)/8+10*0.022/4π2 =1.73*10-4kg.m2
3.预选电机
若选200W,则JM= 0.14*10-4kg.m2
Vmax=0.334m/s
所以 N=0.334/0.02=16.7r/s =16.7*60=1002r/min<3000r/min
6.计算转矩
移动转矩 Tf=Bp/2πη*(μgWA+F)
=0.02/2π*0.9(0.1*9.8*10+0)=0.035N.M 加速时转矩 Ta=(JL+JM)*2πN/加速时间+移动转矩
4.惯量比
JL /JM =1.73/0.14 =12.3<30
(若选100W,则JM= 0.14*10-4kg.m2,比值为 33.9>30
5.最高速度 Vmax
S=1/2*ta*Vmax+tb*Vmax+1/2*td*Vmax 0.3=1/2*0.1*Vmax+0.8*Vmax+1/2*0.1*Vmax
常见刚体的转动惯量
J mr 2 J mr 2 / 2 J mr 2 / 2 J m(r12 r22) / 2
J ml 2 /12 J mr 2 / 2 J 2mr 2 / 5 J 2mr 2 / 3
三.伺服电机的选型原则
• 连续工作扭矩 < 伺服电机额定扭矩
• 瞬时最大扭矩 < 伺服电机最大扭矩 (加速时)
5.3 定轴转动的转动惯量
• 质量离散分布的刚体 J miri2 • 质量连续分布的刚体 J r 2dm
dm为质量元,简称质元。其计算方法如下:
质量为线分布 dm dl 质量为面分布 dm ds 质量为体分布 dm dV
J与质量大小、质量分布、转轴位置有关 演示程序: 影响刚体转动惯量的因素
六.实例应用讲解
案例1
已知:负载重量WA=10kg,螺杆螺距BP=20mm,螺杆直径 BD=20mm,螺杆长BL=0.5m,机械效率η=0.9,摩擦系数 μ=0.1,负载移动距离0.3m,加减速时间ta=td=0.1s,匀速 时间tb=0.8s,静止时间t4=1s。联轴器的惯量Jc= 10x10-6 kg.m2 .请选择满足负载需求的最小功率伺服电机。
=0.231N.M
减速时转矩
Td=(JL+JM)*2πN/加速时间-移动转矩 =0.161N.M
7.确认最大转矩 加速时转矩=Ta=0.231N.M<1.91N.M(电机最 大转矩)
8.确认有效转矩=0.067<0.64(电机额定转矩)
• 惯量比
<电机规定的惯量比
• 连续工作速度 < 电机额定转速
四.伺服电机选型步骤
1.确定机构部 次外,还要确定各机构零件(滚珠丝杆 的长度,导程和带轮直径等)的细节 机构部典型示例
2.确定运转模式
加减速时间、匀速时间、停止时间、循 环时间、移动距离等。
注:运转模式对电机的容量选择有很大的影 响。除了特别需要的情况,加减速时间、停 止时间尽量取得大点,就可以选择小容量的 电机
滑轮半径r (m)
提升力F (N)F=
T r
经过减速机提升后的提
升力为:F=
T r ▪R
r T
F
r
1/R T
F
6.电机带动丝杆扭矩计算
F
电机转矩T (N.m)
螺杆导程PB (m)
推力F (N)F=T▪2π
P
T PB
F
经过减速机提升后的提
升力为:F=T▪2π ▪R
P
T 1/R PB
二.转动惯量
1.定义:是刚体绕轴转动时惯性的量度。通常 以字母I或J来表示。单位为kg·m²
3.计算负载惯量和惯量比
结合各机构部计算负载惯量。(请参照普 通的惯量及其计算方法)并且用所选的电 机的惯量去除负载惯量,计算惯量比。
4.计算转速
根据移动距离、加减速时间、匀速时间计 算电机转速。
5.计算转矩
根据负载惯量和加减速时间、匀速时间计 算所需的电机转矩。
6.选择电机 选择能满足以上3~5项条件的电机。
伺服电机的选型及应用案例 介绍
➢一,扭矩的概念及计算方法 ➢二,转动惯量的概念及计算方法 ➢三,伺服电机选型的原则 ➢四,伺服电机选型的步骤
➢五,与选择相关的项目情况说明 ➢六,实例应用讲解
3.公式:
力矩等于径向矢量与作用力的
如右图所示:欲让门产生转动,必须 施加一外力F。施力点离转轴越远越容 易使门产生转动。平行于门面的分力 对门的转动没有效果,只有垂直于门 面的分力才能让门产生转动。力矩的 符号经常用T表示。单位N ▪ m
T=rFsin θ=有效作用力x力臂
4.电机转速和扭矩(转矩)公式
扭矩公式:T=9550P/n
T是扭矩,单位N·m; P是输出功率,单位KW; n是电机转速,单位r/min
扭矩公式:T=973P/n
T是扭矩,单位kg·m; P是输出功率,单位KW; n是电机转速,单位r/min
5.扭矩计算
电机转矩T (N.m)
2.转速 最高转速通常要在额定转速以下。需使用电机 的最高转速时,应注意转矩和温度的上升。
3.惯量比
惯量比是用电机的转动惯量去除负载惯 量的数值。按照通常的标准,750W以下 的电机为20倍以下,1000W以上的电机 为10倍以下,若要求快速响应,则需更 小的惯量比。反之,如果加速时间允许 数秒,就可以采用更大的惯量比。