20PM 功能简介
两种钙调磷酸酶抑制剂联合常用抗真菌药物对马尔尼菲青霉酵母相体外药敏的研究

两种钙调磷酸酶抑制剂联合常用抗真菌药物对马尔尼菲青霉酵母相体外药敏的研究李强国;李昕;曹存巍【摘要】目的:探讨两种钙调磷酸酶抑制剂联合常用抗真菌药物,对20株马尔尼菲青霉(PM)酵母相体外药敏的作用.方法:参照美国临床和实验室标准协会(CLSI)M27-A3方案并做适当修改,采用棋盘格微量稀释法对20株PM酵母相进行钙调磷酸酶抑制剂环孢素A(CsA)、他克莫司(FK506)与5种常用抗真菌药物联合的体外药敏实验.结果:CsA与两性霉素B(AmB)、伊曲康唑(ITC)、氟康唑(FLC)联合时,各药的最低抑菌浓度(MIC)值均比单用时明显降低(均P<0.05).CsA与AmB、ITC、FLC联合,分别有17株(85%)、13株(65%)、6株(30%)的菌株显示协同作用;而CsA与米卡芬净(MCFG)、卡泊芬净(CPFG)联合所有菌株均表现为无关联作用.FK506与以上5种抗真菌药联合时,各药物的MIC值较单用时无明显变化,联合时呈无关联作用.在所有受试PM酵母相中,CsA及FK506与以上5种抗真菌药物联合均未出现拮抗作用.结论:体外药敏研究显示,CsA与FK506在体外联合药敏中作用不同,CsA可增强AmB、ITC、FLC对PM酵母相的抗真菌活性;但FK506则无此作用.【期刊名称】《广西医科大学学报》【年(卷),期】2015(032)002【总页数】4页(P169-172)【关键词】钙调磷酸酶抑制剂;体外联合药敏试验;马尔尼菲青霉;抗真菌药物【作者】李强国;李昕;曹存巍【作者单位】广西医科大学第一附属医院皮肤性病科南宁530021;广西医科大学第一附属医院皮肤性病科南宁530021;广西医科大学第一附属医院皮肤性病科南宁530021【正文语种】中文【中图分类】R-33双相真菌马尔尼菲青霉(Penicillium marneffei,PM)感染所致的马尔尼菲青霉病(Penicilliosis marneffei,PSM)是一种系统、播散性的深部真菌病,好发于东南亚及我国广西、广东地区[1]。
PM模型

PM 模型日本大阪大学心理学家三隅二不二在20世纪60年代在吸取了前人研究成果的基础上,提出了闻名的领导行为PM 理论。
该理论也是从两个维度来分析领导行为的,在形式上与俄亥俄州立大学的二维模型相似,但是把群体作为一个整体的角度出发研究领导行为和群体行为。
日本大阪大学心理学家三隅二不二在20世纪60年代在吸取了前人研究成果的基础上,提出了闻名的领导行为PM 理论。
理论也是从两个维度来分析领导行为的,形式上与俄亥俄州立大学的二维模型相似,但是把群体作为一个整体的角度出发研究领导行为和群体行为。
该理论认为,群体具有两种功能: 一种功能是实现群体的特定目标,即绩(Performance ,用P 表示),领导者为完成团体目标所做的努力,表现为工作规划、成果等。
另一种功能是改善群体自身的正常运转,即维持(Maintain ,用M 表示):领导者维持及强化团体关系所做的努力。
PM 理论认为,领导者的作用就在于执行这两种团体机能。
因此,领导者的行为也就包括这两个因素。
这样,不论M 因素多么强,也总包含着某种程度的P 因素,同样的道理,不管P 因素多么强,也总包括M 因素。
此外P 和M 两方面都强或两方面都弱的情况也是存在的。
三隅二不二的PM 模型三隅二不二的PM 模型假如以P为横坐标,M为纵坐标,并在P和M坐标中点,各一条线,就可划分出PM、Pm、pM、pm四种领导类型。
三隅二不二教授运用多种方法对各种行业的各层领导进行了多年研究,并以企业的生产性指标和员工的士气性指标进行了检验,获得了关于PM四类型领导效果的基本一致性结果:PM型最好,Pm型和pM型居中,pm型最差。
1、Pm型领导类型的效果在使达成动机低的被试者从事单调无意义的课题的情况下,P型的领导条件是最有效的,这是由于P型中所包含的压力因素的作用,压力因素,是指对被试者完成课三隅二不二的PM模型题进行强制的外在的压力作用。
P型和其它三种类型相比,作为客观条件的P型压力,实际上是最显著的,客观上压力最大的P型,对于达成动机低的被试者来说,相对地会带来最大的课题完成的效果,但是,外在的压力在被试者中,会产生心理反抗的反作用。
中达20PM教育训练资料_第五天

PM-Soft 軟體POU功能塊使用 說明與DVPFPMC通訊網路卡
DVP20PM教育訓練大綱
第五天
17. PM-Soft 軟體POU功能塊使用說明 18. Canopen Card CIA402應用 19.Ethernet 應用 實機操作
PMSoft POU 簡介
專案中可獨立出來撰寫的部份,可在功能 塊中建立一POU(Function Block)單獨撰寫 。
如何建立POU(Program)
在建立新的PMSoft專案檔後, 系統會自動建立Program類別的 POU(ex: O100, Ox0~Ox99, P0~P255), 使用者只需要在系統資訊區 (System Information), 點選相對應的POU 程式Icon, 即可以進行程式的 編輯
方法二: 方法二: 在Ladder編輯視窗中,直接使用滑鼠雙擊功能塊,即可開啟該功能塊 視窗進行編輯
滑鼠雙擊 功能塊
開啟功能塊 編輯視窗
功能塊的匯出和匯入
目的 : 讓使用者將寫好的功能塊建立成程式庫, 以便達到功能塊重複 使用的功效 匯出功能塊 (Export Function Blocks) : 提供單一或是多個功能塊的匯出 提供密碼保護功能 系統預設的附檔名為(.fbu) (.fbu) 匯入功能塊 (Import Function Blocks) : 不允許匯入相同名稱的功能塊 當匯入功能塊有密碼保護時, 需輸入正確的密碼, 才能完成匯入
功能塊輸入 接腳 數值
功能塊輸出 接腳數值
監控表單
監控變數輸入方式: 監控變數輸入方式:
1. 在監控表單按下滑鼠右鍵,點選『Insert Symbols…』,開啟符號輸入表單
HC-PM18%20烧录器使用手册pdf
HC-PM18用户手册芯圣电子2012年5月修正记录版本日期描述Ver1.00 2011-4-28 第一版Ver1.01 2011-11-1 第二版,v2.03版,增加USB驱动安装说明Ver1.02 2012-05-30 第三版,v2.08版目录1 简介 (4)2 HC-PM18硬件连接 (4)3 USB驱动安装 (5)4 HC-PM18联机下载 (11)HC文件生成说明 (11)HC文件联机下载 (16)5 HC-PM18脱机烧录 (22)HC-PM18 接口说明 (23)HC-PM18烧录子板说明 (24)HC-PM18烧录器是Holychip 的新一代烧录工具,适用于HC18P 系列8-bit OTP MCU 的脱机烧录。
本产品具有操作简单的特点。
HC-PM18特点:采用USB 方式连接 支持单路脱机烧录HC-PM18配置:HC-PM18硬件烧录器(1台) DC15V 电源适配器(1个) USB 线(1根) 烧录子板(1套)2 HC-PM18硬件连接HC-PM18烧录器使用USB 线和PC 连接,就可以实现软件程序下载。
进行脱机烧录时,需要连接15V 电源适配器。
15V 电源接口 USB 连接接口串口,未使用40PIN 烧录接口HC-IDE2.08中已经内建了USB驱动程序,用户可以按照下面的步骤进行安装。
用USB线将HC-PM18仿真器与PC连接,PC屏幕出现如下图,表示PC已经检测到新的硬件。
安装向导请选择“从列表或指定位置安装(高级)(S)”。
按“下一步”,弹出如下窗口。
在此窗口中,请选择在搜索中包括这个位置。
在浏览窗口中选择目录C:\Program Files\Holychip\HC-IDE2.08\Driver,如果在HC-IDE安装时有更改安装路径,请选择到安装的文件夹。
按“下一步”,弹出如下窗口。
PC开始自动搜索安装驱动。
搜索结束,显示下面的窗口。
请选择hcusb2.inf。
PM-20BL三菱plc锂电池详细介绍

BR-CCF2TH6.0V松下锂电池 带插头
BR-2/3AGCT4A 6.0V松下锂电池四个BR-2组合在一起
BR-AGCF2W松下锂电池带插头
帅福特锂电池
LS142503.6V帅福特锂电池 无插头SIZE 1/2AA
CJ1W-BAT01欧姆龙CJ 1M PLC用锂电池(SANYO CR14250/3V)带插头
3G2A9-BAT08 欧姆龙CQM1 / C60P PLC用锂电池(MAXELL ER17/33)带插头
C200H-BAT09 欧姆龙C200H PLC用锂电池(SANYO CR17335SE)带插头
ER10/28/10x31mm/410mAh/4g/20μA
产品优点︰
锂-亚硫酰氯电池额定电池3.6V,是目前锂电池系列中电压最高的;
锂-亚硫酰氯电池是实际使用电池中能量最高的一种电池(500 wh/kg, 1000wh/dm3);
常温中等电流密度放电时,放电曲线极为平坦。90%的容量范围内工作平台保持不变;
PM-20BL 三菱F940用锂电池(MAXELL ER3)带插头
Q6BAT 三菱QNS PLC用锂电池(Mitsubashi CR17335SE-R/3V)带插头
Q2MEM-BAT 三菱QNS Q2MEM-1MBS用锂电池
欧姆龙锂电池
CP1W-BAT01欧姆龙锂电池
CS1W-BAT01欧姆龙CP1H/CS1/CJ1/ NT631用锂电池(ER17500V/3.6V)带插头
6ES5980-0AA21西门子S5 PLC用锂电池
6EW1000-7AA 西门子S5 PLC用锂电池
设备PM

ERP完整的资产生命周期管理(EAM)
投资计划 1 2 退役和处理 7 设备资产表现评估 供应商选择 项目定义
8
6 项目执行 4 设备资产维护
3
备品备件管理(外部服务) 5
设备资产生命周期管理
报废、出让
> “出让”并非一般的处置 > 提高估价 > 为运营收回资金
维护、管理
>故障性 、预防性维护 > 提高资产回报率 > 库存管理和采购
32901360
发油区 32901360-W1 32901360 储油区 32901360-W2 接卸区 32901360-W3 辅助生产区 32901360 -W4 32901360 行政管理区 32901360-W5 闲置设备存放区 32901360 -WX
图例
18
设备
设备是一个能独立完成某项作 业,并能重复使用;作为一个 自治单元的独立实体, 损坏之后首先考虑的是维护, 而不是更换。
分层次的分类编码 分类名称
0701
070101 070102 070103 070199 ……
泵
离心泵 单级泵 多级泵 其它离心泵 ……
q
此分类作为系统自动生成的设备技术状况表(总部所需报表)的一个设备分类依据。
21
q 设备主数据及技术参数(图例),以蚌埠油库1#发油货 位上的流量计为例,功能位置层次为32901391-W1-0001 。 q 设备号为 420004019。主数据分为:一般/位置/组织结 构/结构/技术参数表。
下达维修指令
检修
历史
哪一台设备 设备的安装位置 什么时候 出了什么故障 有没有停机 对生产的影响程度
要求什么时候开始修、什么时候完成 怎么修,由谁来修,需要多少工时 施工网络 需要更换哪些配件、库存能否满足 需要多少成本 计划、审批过程
20PM(C式)气动快速接头
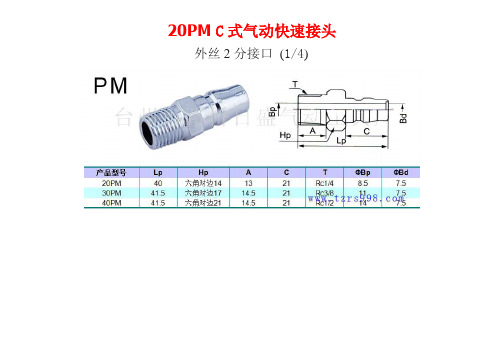
20PM C式气动快速接头外丝2分接口(1/4)气动快速接头:是一种主要用于空气配管、气动工具的快速接头,不需要工具就能实现管路连通或断开的接头。
气动快速接头类型,按结构可分为:1、两端开闭式:不链接时——当母体的套圈移到另一端时,不锈钢珠自动向外滚动,子体因母体与子体共同阀门弹簧力的作用力运作下而断开,子体与母体的阀门各自闭合,瞬间阻断流体流动。
链接时——当子体插入母体时,套圈在弹簧的作用下回到原来的位置,钢珠滚动锁紧子体紧密连接,同时母体与子体的阀门互相推动而打开,流体流通,O型圈能完全阻断流体的渗漏。
2、两端开放式:不链接——当母体的套圈被推到另一端时,钢珠自动向外滚动,因此,子体被移出;由于子体与母体都没有阀门,流体向外流出。
链接——当子体插入母体时,套圈被其弹簧的作用力推到先前的位置致钢珠锁紧,流体流动,其中的O型圈以防止液漏。
3、单路开闭式:不链接时——当母体的套圈移到另一端时,不锈钢珠自动向外滚动,子体被阀门弹簧的反作用力弹开,阀门就能自动关闭以阻断流体流动。
链接时——当子体插入有套圈的母体一侧时,阀门被打开导致流体流动,垫圈被弹簧的力量推回原来的位置,不锈钢珠会锁住以确保子/母体连接,里面的垫圈能完全阻断流体的渗漏。
用途和特点:快速接头适用于气压管路,压缩空气、氮气的连接,管路可以经常装卸的工作位置上,如气动工具在流水线的操作。
也可以用于油压机器、化学、船舶配管等。
气动快速接头使用注意事项:●请不要用于快速流体接头以外的用途。
●请不要用于适用流体以外的流体。
●请不要与其它公司产的快速流体接头相连接。
●使用时不要超过最高使用压力。
●不要在使用温度范围以外使用,防止造成密封材料磨损或泄漏。
●不要进行人为的击打、弯曲、拉伸、防止造成破损。
●不要在混入金属粉或砂尘等地方使用,防止造成工作不良或泄漏。
●如附着杂物会造成工作不良或泄漏。
●请勿拆卸快速接头。
infinite M200使用手册-酶标仪

长:457mm 宽:425mm 高:253mm
14Kg 15.8Kg
12
环境条件 环境温度 操作时 非操作时 相对湿度 过压级别 污染级别
用途 嘈声水平 处置方式
15℃--30℃ 59℉--86℉ -20℃--+60℃ –4℉--+140℉ 小于 90% 无冷凝 Ⅱ 2 实验室用仪器 <60dBA 电子废弃物(传染性废弃物)
9
仪器背面接口示意图
1. 仪器风扇 2. 电源风扇 3. 电源开关 4. 电源接口 5. 认证标签 6. 配置标签 7. 仪器名称和信息 8. 保修标签 9. USB 接口 10.加液器接口
!注意:撕毁或者除去保修标签,将使保修合同失效
10
2. 3 移机和运输
如果需要移动仪器,请先打开计算机,打开仪器电源,运行操作软件,用 操作软件依次弹出微孔板托架,比色杯架(M200),滤光片架(F200),确定 仪器内部没有存留微孔板、比色杯、滤光片架或其它外来实验耗材,然后关闭操 作软件,关闭仪器和计算机电源,拔下仪器的电源线和 USB 数据线。
3
附录 2 附 2NanoQuant 模块的使用方法 附 2.1 NanoQuant 概述………………………………………………………60 附 2.2 NanoQuant 模块的使用方法…………………………………………60 附 2.3 NanoQuant 板的维护…………………………………………………67
4
1. 概况
1.1 仪器概述
Tecan Infinite 200 是 Tecan 公司生产的全自动多功能微孔板阅读器, 支持 ANSI/SBS 标准的 6 孔板至 384 孔板,与 Tecan 自动工作站兼容。
Tecan Infinite 200 分为两个型号: Infinite M200 采用光栅设计; Infinite F200 采用滤光片设计。
台达20PM G码资料
Z軸
Z軸
目標點 ( x,y,z)
目標點
圓心 ( y,z)
目標點 ( x,y,z) X軸
圓心
R(半徑)
R(半徑)
( y,z)
X= 0
目標點 圓心 起始點 X軸
起始點
圓心
R(半徑)
起始點
X= 0
R(半徑)
起始點 X= 0
X= 0
Y軸
Y軸
G19
CCW(逆時針運轉)
G3 X Y Z R
G19
CW(順時針運轉)
G2 X Y Z J K
圓心
(I,K)
圓心
(I,K)
目標點 ( x,y,,y,z)
(I,K)
圓心
圓心
(I,K)
目標點 ( x,z)
Y軸
Y= 0
起始點
X軸
G18 G3 X Y Z I K
Y= 0 CCW(逆時針運轉)
起始點
X軸
G18 G2 X Y Z I K
Y= 0 CW(順時針運轉)
螺旋補間在G19模式(YZ平面)下,假如X軸無變化量(X=0),螺旋補間運作同YZ軸兩軸圓弧補間。中心點
02
CW
順時針螺旋移動(設定半徑長度)
03
CCW
逆時針圓弧移動(設定半徑長度)
03
CCW
逆時針螺旋移動(設定半徑長度)
17
NULL
XY平面設定
18
NULL
XZ平面設定
19
NULL
YZ平面設定
適用機種
20D 20M
✓
✓
✓
✓
✓
✓
✓
✓
✓
✓
✓
20PM运动控制器实现多电子凸轮同步的应用

整个流程类似一个机械主轴,通过齿轮联结四个从轴凸轮轴,每个凸轮的形状根据具体产品不一样形状也,不一样 。
下面的图形是客户一种规格产品四个凸轮的轨迹。
虚拟主轴与上冲伺服的数据对应为
0 0
40 0
150 8000
180 70000
192 10000
300 0
360 0
虚拟主轴与母模伺服的数据为
用20PM运动控制器新版软件实现绕线机控制模块的编制
摘要:
本文主要介绍如何用台达20PM运动控制器新软件实现功能块的编制,并通过编制绕线机通用控制模块案例描述编程细节,从而使用户通过本文熟练使用功能块,编制其他典型行业的通用模块程序。减少重复性的劳动
关键字:台达20PM运动控制器凸轮功能CAM曲线同步虚拟主轴
由于输入凸轮的数据点比较少生成的曲线运行时会不太平滑,需要在设置的10个数据中加入设定的解析点,比如400点,三次曲线等。如下
D0=k10003迳建立平滑曲線
D101..100连主軸最大值
D102连原資料點數
D103连插值總點數
D104连平滑係數(3, 4, 5, 6次曲線, other 3次曲線)
上图为通过HMI输入母模凸轮与虚拟主轴的运动轨迹,其他四个数据通过同样途径输入,也可能有的产品用不到四个凸轮轴,只需把不用的从轴数据全设为0.然后通过主界面调用配方,点刷新按钮即可。
对应20PM程序里的相应数据寄存器里存入凸轮数据
每个20PM,都按此过程生成凸轮数据,
生成数据上载如下图
现在只要执行凸轮离合运行就可各个凸轮轨迹运转了。
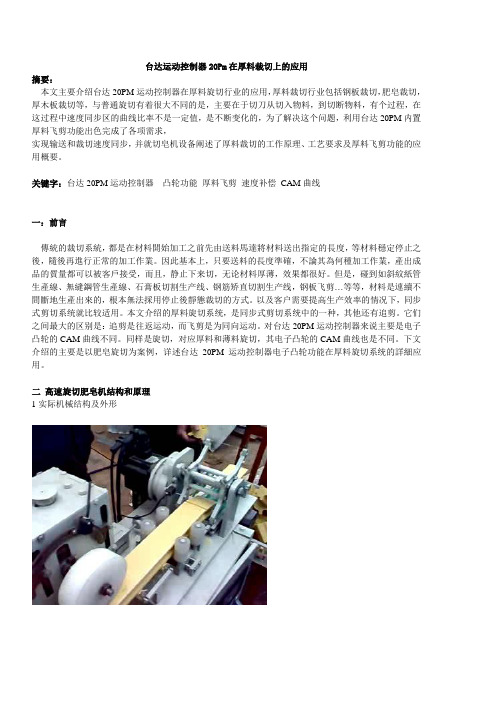
二 高速冲压机结构和原理
1实际机械结构及外形
如上图所示分别有四个独立的轴,每个轴都有一个A系列3KW电机直联。
PM模型
PM 模型日本大阪大学心理学家三隅二不二在20世纪60年代在吸取了前人研究成果的基础上,提出了闻名的领导行为PM 理论。
该理论也是从两个维度来分析领导行为的,在形式上与俄亥俄州立大学的二维模型相似,但是把群体作为一个整体的角度出发研究领导行为和群体行为。
日本大阪大学心理学家三隅二不二在20世纪60年代在吸取了前人研究成果的基础上,提出了闻名的领导行为PM 理论。
理论也是从两个维度来分析领导行为的,形式上与俄亥俄州立大学的二维模型相似,但是把群体作为一个整体的角度出发研究领导行为和群体行为。
该理论认为,群体具有两种功能: 一种功能是实现群体的特定目标,即绩(Performance ,用P 表示),领导者为完成团体目标所做的努力,表现为工作规划、成果等。
另一种功能是改善群体自身的正常运转,即维持(Maintain ,用M 表示):领导者维持及强化团体关系所做的努力。
PM 理论认为,领导者的作用就在于执行这两种团体机能。
因此,领导者的行为也就包括这两个因素。
这样,不论M 因素多么强,也总包含着某种程度的P 因素,同样的道理,不管P 因素多么强,也总包括M 因素。
此外P 和M 两方面都强或两方面都弱的情况也是存在的。
三隅二不二的PM 模型三隅二不二的PM 模型假如以P为横坐标,M为纵坐标,并在P和M坐标中点,各一条线,就可划分出PM、Pm、pM、pm四种领导类型。
三隅二不二教授运用多种方法对各种行业的各层领导进行了多年研究,并以企业的生产性指标和员工的士气性指标进行了检验,获得了关于PM四类型领导效果的基本一致性结果:PM型最好,Pm型和pM型居中,pm型最差。
1、Pm型领导类型的效果在使达成动机低的被试者从事单调无意义的课题的情况下,P型的领导条件是最有效的,这是由于P型中所包含的压力因素的作用,压力因素,是指对被试者完成课三隅二不二的PM模型题进行强制的外在的压力作用。
P型和其它三种类型相比,作为客观条件的P型压力,实际上是最显著的,客观上压力最大的P型,对于达成动机低的被试者来说,相对地会带来最大的课题完成的效果,但是,外在的压力在被试者中,会产生心理反抗的反作用。
台达运动控制器20Pm在厚料裁切上的应用
台达运动控制器20Pm在厚料裁切上的应用摘要:本文主要介绍台达20PM运动控制器在厚料旋切行业的应用,厚料裁切行业包括钢板裁切,肥皂裁切,厚木板裁切等,与普通旋切有着很大不同的是,主要在于切刀从切入物料,到切断物料,有个过程,在这过程中速度同步区的曲线比率不是一定值,是不断变化的,为了解决这个问题,利用台达20PM内置厚料飞剪功能出色完成了各项需求,实现输送和裁切速度同步,并就切皂机设备阐述了厚料裁切的工作原理、工艺要求及厚料飞剪功能的应用概要。
关键字:台达20PM运动控制器凸轮功能厚料飞剪速度补偿CAM曲线一:前言傳統的裁切系統,都是在材料開始加工之前先由送料馬達將材料送出指定的長度,等材料穩定停止之後,隨後再進行正常的加工作業。
因此基本上,只要送料的長度準確,不論其為何種加工作業,產出成品的質量都可以被客戶接受,而且,静止下来切,无论材料厚薄,效果都很好。
但是,碰到如斜紋紙管生產線、無縫鋼管生產線、石膏板切割生产线、钢筋矫直切割生产线,钢板飞剪…等等,材料是連續不間斷地生產出來的,根本無法採用停止後靜態裁切的方式。
以及客户需要提高生产效率的情况下,同步式剪切系统就比较适用。
本文介绍的厚料旋切系统,是同步式剪切系统中的一种,其他还有追剪。
它们之间最大的区别是:追剪是往返运动,而飞剪是为同向运动。
对台达20PM运动控制器来说主要是电子凸轮的CAM曲线不同。
同样是旋切,对应厚料和薄料旋切,其电子凸轮的CAM曲线也是不同。
下文介绍的主要是以肥皂旋切为案例,详述台达20PM运动控制器电子凸轮功能在厚料旋切系统的詳細应用。
二高速旋切肥皂机结构和原理1实际机械结构及外形Drive HMI如上图所示,左为一测米轮,右为切刀,侧米轮后带一2000线的编码器,,2,电气控制原理上图所示为电气控制原理,图中分为送料单元和剪切单元,送料单元通过20PM上的DA卡,给变频器一0--10v的信号控制送料速度,剪切单元由20PM,根据HMI设定的长度,以及编码器反馈的物料的速度和位置,控制剪切伺服动作,对肥皂进行定长裁切。
PSPICE简介

e.g. 2_r.cir RMOD EXAPLE VDD 1 0 5V R1 1 0 RMOD 1K .MODEL RMOD RES (R=1 TC1=0.02 TC2=0.0002) .OP .DC TEMP LIST -40 -30 -20 -10 0 10 20 30 40 50 60 70 80 90 100 .PROBE .END
武汉大学物理科学与技术学院
常胜
美国Microsim公司于1984年首次推出了可以应用于PC 机的仿真分析软件PSpice,不仅保留了SPICE的原有全部 功能,而且增加了新的仿真分析功能,扩展了原件模型和 宏模型库,在仿真速度,算法的可靠性和收敛性,输入输 出格式和图形后处理等方面都有所改善。 1998年Microsim公司被OrCAD公司并购,PSpice并入 OrCAD开发工具中,成为OrRCAD/PSpice。 OrCAD后被Cadence公司收购,现在最新的版本是16.3。
PSpice简介
武汉大学物理科学与技术学院
常胜
§1 PSPICE简介
一、 SPICE简介 PSpice的起源
Simulation Program for Integrated Circuit Emphasis 美国加州伯克莱大学雏形 EDA厂家OrCAD Spice→ OrCAD PSpice A/D
武汉大学物理科学与技术学院
常胜
电阻的温度效应
武汉大学物理科学与技术学院 常胜
2、电容模型 模型: .MODEL MNAME CAP C=PVAL1 <VC1=PVAL2> <VC2=PVAL3> <TC1=PVAL4> <TC2=PVAL5> 电容模型关键字为CAP;MNAME为定义的模型名; VC1为电容的一阶电压系数,VC2为电容的二阶电压系 数,有C(V)=<Value>[1+VC1*V+VC2*V2],V为当前 电压;TC1,TC2含义同电阻模型。 描述:C <name> <N1> <N2> [Mode name] <Value> [IC=INCOND] 以上描述中<N1>为正节点,<N2>为负节点;IC用来 设定初始电压条件。 e.g. C2 9 6 CMOD 3.5P .MODEL CMOD CAP(C=1 VC1=0.01 VC2=0.002 +TC1=0.02 TC2=0.005)
台达20PM追剪应用总结A

台达20PM追剪应用总结作者:(PLC产品处余强)【摘要】介绍台达DVP-20PM00D运动控制器电子凸轮(CAM)功能,总结追剪曲线的生成几种方法,阐述通用高速追剪工作原理,以及相关工艺要求及相关控制程式概要。
以使读者根据文章即可实现不同追剪系统的控制【關鍵字】运动控制器,电子凸轮,CAM Table,追剪【前言】本文介绍的追剪系统,是同步式剪切系统中的一种,其他还有飞剪,旋切。
它们之间最大的区别是:追剪是往返运动,而飞剪是为同向运动。
对台达20PM运动控制器来说主要是电子凸轮的CAM曲线不同。
下文介绍的主要是台达20PM运动控制器电子凸轮功能在高速追剪系统的应用总结。
【正文】一、设备一般结构图2如上两个图示意,通用追剪机构一般包含以下部分机构,分述如下:(1)执行机构在裁切系统,执行机构是切刀,切刀是由液压推进,主要由一个进刀电磁阀和一退刀电磁阀控制切刀的上下。
在饮料罐装系统执行机构为填充装置。
(2)測量機構安装于出來部分,如圖所示,同軸聯接一2500線的A/B相的差分編碼器,測量进料的速度,及長度。
是电子凸轮运动中的主轴。
(3)追踪机构主要由台达伺服传动机构组成(功率大的可选VE系列变频器),由20PM00D的X轴输出控制,是电子凸轮运动中的从轴。
(4)进料傳動进料傳動是由变频电机、传动机构组成。
二追剪控制及20PM运动控制器电子凸轮功能应用介绍1、追剪曲线构成(1) 追速状态(Ramp up to Tracking ):送料持续进行,20PM 运动控制器在 侦测输入材料之长度及当时送料速度的同时,并指挥伺服电机依照S 曲线 加速至与进料速度同步;在进入同步速度的瞬间,锯/切台与材料的动态 相对位置已经整定完成。
接着便进入同步状态。
(2)同步状态(Syncronized Zone ): 一旦进入同步状态,20PM 运动控制器立刻送出同步信号(CLEAR)给执行控制机构,要求执行切断或罐装动作。
美的 PM20M1 微波炉- 说明书.pdf

2
爆米花
1袋(100克)
3
煮玉米
1个(200克)
4
煮红薯 / 土豆
1个(200克)
5
热速冻包
(表面撒水+盖保鲜膜)
2个(100克)
火力
默认高火 默认高火 默认高火 默认高火 默认高火
时间
2~3分钟 2~3分钟 4~5分钟 4~5分钟 1~2分钟
注意 快捷加热是利用微波加热,微波功能下金属材料(含锡箔纸)不能用哦! 烹调时使用保鲜膜(留孔透气)或带孔的盖子,可防止食物发干。 加热过程可调整食物摆放位置或搅拌,食物加热更均匀。
表示【强制】的内容
使用前,请确保外罩防护膜已撕去 此微波炉只能使用为该微波炉推荐的温度传感探头。 请使用微波烹调器皿 警告: 在微波炉内仅能使用适合的器皿,禁止加热密封容器内的液体和其他食物,因为这样可能 发生爆炸。加热前请将食物包装撕开,盛到微波炉专用器皿后再加热。 取下所有包装材料并远离婴幼儿 包括包装袋、外罩膜、附件,以免工作过程发生火灾;并远离婴幼儿,防止误用导致窒息。
10
智能火力
1 按【智能火力】键设定火力。
注: 火力4档可调,默认为高火。
2 连续按【智能火力】键调节火力。
03
产品简介
注意 由于我们的产品不断升级,如实物与下图存在差异,请以实物为准。 此产品为桌面式产品,禁止用作嵌入式。
部件展示
上方>30cm
散热孔
(左下方)
左右方>10cm
注意:高温表面
高温警示图标
*加热时注意防烫,请勿触摸
后方>10cm
开门按键
显示屏 控制面板(非触摸屏)
附件清单
不在清单内的附件请谨慎使用,也可查看“烹饪器具选择”,详见第7页。
EasyLogic PM2200 系列 用户手册说明书

EasyLogic™PM2200系列用户手册NHA2778903-112022年5月法律声明施耐德电气品牌以及本指南中涉及的施耐德电气及其附属公司的任何商标均是施耐德电气或其附属公司的财产。
所有其他品牌均为其各自所有者的商标。
本指南及其内容受适用版权法保护,并且仅供参考使用。
未经施耐德电气事先书面许可,不得出于任何目的,以任何形式或方式(电子、机械、影印、录制或其他方式)复制或传播本指南的任何部分。
对于将本指南或其内容用作商业用途的行为,施耐德电气未授予任何权利或许可,但以“原样”为基础进行咨询的非独占个人许可除外。
施耐德电气的产品和设备应由合格人员进行安装、操作、保养和维护。
由于标准、规格和设计会不时更改,因此本指南中包含的信息可能会随时更改,恕不另行通知。
在适用法律允许的范围内,对于本资料信息内容中的任何错误或遗漏,或因使用此处包含的信息而导致或产生的后果,施耐德电气及其附属公司不会承担任何责任或义务。
EasyLogic™PM2200系列安全信息重要信息在尝试安装、操作、维修或维护本设备之前,请对照设备仔细阅读这些说明,以使自己熟悉该设备。
下列专用信息可能出现在本手册中的任何地方,或出现在设备上,用以警告潜在的危险或提醒注意那些对某过程进行阐述或简化的信息。
这两个符号中的任何一个与“危险”或“警告”安全标签一起使用,指示存在电击危险,若不遵循相关说明,可能会导致人身伤害。
这是安全警示符号。
它用来提醒您可能存在的人身伤害危险。
请遵守与此符号一起出现的全部安全信息,以避免可能的人身伤害或死亡。
危险危险表示存在危险情况,如果不避免,会导致死亡或严重人身伤害。
未按说明操作将导致人身伤亡等严重后果。
警告警告表示存在潜在的危险情况,如果不避免,可能导致死亡或严重人身伤害。
小心小心表示存在潜在的危险情况,如果不避免,可能导致轻微或中度人身伤害。
注意注意用于提醒注意与人身伤害无关的事项。
请注意电气设备应仅由经过认证的技术人员进行安装、操作、维护和维修。
AT32F415系列微控制器数据手册说明书
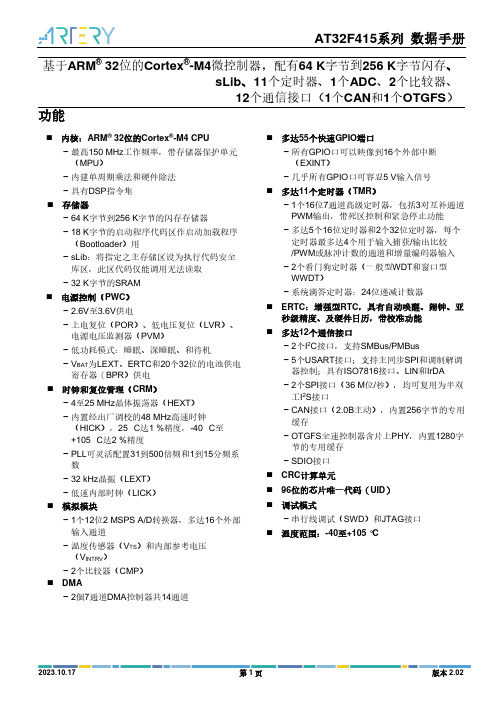
基于ARM® 32位的Cortex®-M4微控制器,配有64 K字节到256 K字节闪存、sLib、11个定时器、1个ADC、2个比较器、12个通信接口(1个CAN和1个OTGFS)功能⏹内核:ARM® 32位的Cortex®-M4 CPU−最高150 MHz工作频率,带存储器保护单元(MPU)−内建单周期乘法和硬件除法−具有DSP指令集⏹存储器− 64 K字节到256 K字节的闪存存储器− 18 K字节的启动程序代码区作启动加载程序(Bootloader)用− sLib:将指定之主存储区设为执行代码安全库区,此区代码仅能调用无法读取− 32 K字节的SRAM⏹电源控制(PWC)− 2.6V至3.6V供电−上电复位(POR)、低电压复位(LVR)、电源电压监测器(PVM)−低功耗模式:睡眠、深睡眠、和待机− V BAT为LEXT、ERTC和20个32位的电池供电寄存器(BPR)供电⏹时钟和复位管理(CRM)− 4至25 MHz晶体振荡器(HEXT)−内置经出厂调校的48 MHz高速时钟(HICK),25 °C达1 %精度,-40 °C至+105 °C达2 %精度− PLL可灵活配置31到500倍频和1到15分频系数− 32 kHz晶振(LEXT)−低速内部时钟(LICK)⏹模拟模块− 1个12位2 MSPS A/D转换器,多达16个外部输入通道−温度传感器(V TS)和内部参考电压(V INTRV)− 2个比较器(CMP)⏹DMA− 2個7通道DMA控制器共14通道⏹多达55个快速GPIO端口−所有GPIO口可以映像到16个外部中断(EXINT)−几乎所有GPIO口可容忍5 V输入信号⏹多达11个定时器(TMR)− 1个16位7通道高级定时器,包括3对互补通道PWM输出,带死区控制和紧急停止功能−多达5个16位定时器和2个32位定时器,每个定时器最多达4个用于输入捕获/输出比较/PWM或脉冲计数的通道和增量编码器输入− 2个看门狗定时器(一般型WDT和窗口型WWDT)−系统滴答定时器:24位递减计数器⏹ERTC:增强型RTC,具有自动唤醒、闹钟、亚秒级精度、及硬件日历,带校准功能⏹多达12个通信接口− 2个I2C接口,支持SMBus/PMBus− 5个USART接口;支持主同步SPI和调制解调器控制;具有ISO7816接口、LIN和IrDA− 2个SPI接口(36 M位/秒),均可复用为半双工I2S接口− CAN接口(2.0B主动),内置256字节的专用缓存− OTGFS全速控制器含片上PHY,内置1280字节的专用缓存− SDIO接口⏹CRC计算单元⏹96位的芯片唯一代码(UID)⏹调试模式−串行线调试(SWD)和JTAG接口⏹温度范围:-40至+105 °C封装Array− LQFP64 10 x 10 mm− LQFP64 7 x 7 mm− LQFP48 7 x 7 mm− QFN48 6 x 6 mm− QFN32 4 x 4 mm目录1规格说明 (11)2功能简介 (13)2.1ARM®Cortex®-M4 (13)2.2存储器 (14)2.2.1闪存存储器(Flash) (14)2.2.2存储器保护单元(MPU) (14)2.2.3内置随机存取存储器(SRAM) (14)2.3中断 (14)2.3.1嵌套的向量式中断控制器(NVIC) (14)2.3.2外部中断(EXINT) (14)2.4电源控制(PWC) (14)2.4.1供电方案 (14)2.4.2复位和电源电压监测器(POR / LVR / PVM) (15)2.4.3电压调节器(LDO) (15)2.4.4低功耗模式 (15)2.5启动模式 (15)2.6时钟 (16)2.7通用输入输出口(GPIO) (16)2.8重映射功能 (16)2.9直接存储器访问控制器(DMA) (16)2.10定时器(TMR) (17)2.10.1高级定时器(TMR1) (17)2.10.2通用定时器(TMR2~5和TMR9~11) (17)2.10.3系统滴答定时器(SysTick) (18)2.11看门狗(WDT) (18)2.12窗口型看门狗(WWDT) (18)2.13增强型实时时钟(ERTC)和电池供电寄存器(BPR) (18)2.14通信接口 (19)2.14.1串行外设接口(SPI) (19)2.14.2内部集成音频接口(I2S) (19)2.14.3通用同步/异步收发器(USART) (19)2.14.4内部集成电路总线(I2C) (19)2.14.5安全数字输入/输出接口(SDIO) (19)2.14.6控制器区域网络(CAN) (20)2.14.7通用串行总线On-The-Go全速(OTGFS) (20)2.15循环冗余校验(CRC)计算单元 (20)2.16模拟/数字转换器(ADC) (20)2.16.1温度传感器(V TS) (20)2.16.2内部参考电压(V INTRV) (21)2.17比较器(CMP) (21)2.18调试:串行线(SWD)/ JTAG调试接口 (21)3引脚定义 (22)4存储器映像 (28)5电气特性 (29)5.1测试条件 (29)5.1.1最小和最大数值 (29)5.1.2典型数值 (29)5.1.3典型曲线 (29)5.1.4供电方案 (29)5.2绝对最大值 (30)5.2.1额定值 (30)5.2.2电气敏感性 (31)5.3规格 (32)5.3.1通用工作条件 (32)5.3.2上电和掉电时的工作条件 (32)5.3.3内嵌复位和电源控制模块特性 (32)5.3.4存储器特性 (34)5.3.5供电电流特性 (34)5.3.6外部时钟源特性 (42)5.3.7内部时钟源特性 (46)5.3.8PLL特性 (47)5.3.9低功耗模式唤醒时间 (47)5.3.10EMC特性 (47)5.3.11GPIO端口特性 (48)5.3.12NRST引脚特性 (50)5.3.13TMR定时器特性 (50)5.3.14SPI接口特性 (51)5.3.15I2S接口特性 (53)5.3.16I2C接口特性 (54)5.3.17SDIO接口特性 (55)5.3.18OTGFS接口特性 (56)5.3.1912位ADC特性 (57)5.3.20内部参照电压(V INTRV)特性 (59)5.3.21温度传感器(V TS)特性 (60)5.3.22比较器(CMP)特性 (61)6封装特性 (62)6.1LQFP64 – 10 x 10 mm封装数据 (62)6.2LQFP64 – 7 x 7 mm封装数据 (64)6.3LQFP48 – 7 x 7 mm封装数据 (66)6.4QFN48 – 6 x 6 mm封装数据 (68)6.5QFN32 – 4 x 4 mm封装数据 (70)6.6封装丝印 (71)6.7热特性 (72)7型号说明 (73)8版本历史 (74)表目录表1. 选型列表 (2)表2. AT32F415系列器件功能和配置 (12)表3. 启动加载程序(Bootloader)的管脚配置 (16)表4. 定时器功能比较 (17)表5. AT32F415系列引脚定义 (25)表6. 电压特性 (30)表7. 电流特性 (30)表8. 温度特性 (30)表9. ESD值 (31)表10. Latch-up值 (31)表11. 通用工作条件 (32)表12. 上电和掉电时的工作条件 (32)表13. 内嵌复位和电源管理模块特性 (32)表14. 可编程电压检测器特性 (33)表15. 内部闪存存储器特性 (34)表16. 内部闪存存储器寿命和数据保存期限 (34)表17. 运行模式下的典型电流消耗 (35)表18. 睡眠模式下的典型电流消耗 (36)表19. 运行模式下的最大电流消耗 (37)表20. 睡眠模式下的最大电流消耗 (37)表21. 深睡眠和待机模式下的典型和最大电流消耗 (38)表22. V BAT的典型和最大电流消耗(LEXT和ERTC开启) (40)表23. 内置外设的电流消耗 (41)表24. HEXT 4 ~ 25 MHz晶振特性 (42)表25. 高速外部用户时钟特性 (43)表26. LEXT 32.768 kHz晶振特性 (44)表27. 低速外部用户时钟特性 (45)表28. HICK振荡器特性 (46)表29. LICK振荡器特性 (46)表30. PLL特性 (47)表31. 低功耗模式的唤醒时间 (47)表32. EMS特性 (47)表33. GPIO静态特性 (48)表34. 输出电压特性 (49)表35. 输入交流特性 (49)表36. NRST引脚特性 (50)表37. TMR定时器特性 (50)表38. SPI特性 (51)表39. I2S特性 (53)表40. SD/MMC接口特性 (55)表41. OTGFS启动时间 (56)表42. OTGFS直流特性 (56)表43. OTGFS电气特性 (56)表44. ADC特性 (57)表45. f ADC = 14MHz时的最大R AIN (58)表46. f ADC = 28MHz时的最大R AIN (58)表47. ADC精度 (58)表48. 内置参照电压特性 (59)表49. 温度传感器特性 (60)表50. 比较器特性 (61)表51. LQFP64 – 10 x 10 mm 64引脚薄型正方扁平封装机械数据 (63)表52. LQFP64 – 7 x 7 mm 64引脚薄型正方扁平封装机械数据 (65)表53. LQFP48 – 7 x 7 mm 48引脚薄型正方扁平封装机械数据 (67)表54. QFN48 – 6 x 6 mm 48引脚正方扁平无引线封装机械数据 (69)表55. QFN32 – 4 x 4 mm 32引脚正方扁平无引线封装机械数据 (71)表56. 封装的热特性 (72)表57. AT32F415系列型号说明 (73)表58. 文档版本历史 (74)图目录图1. AT32F415系列功能框图 (13)图2. AT32F415系列LQFP64引脚分布 (22)图3. AT32F415系列LQFP48引脚分布 (23)图4. AT32F415系列QFN48引脚分布 (23)图5. AT32F415系列QFN32引脚分布 (24)图6. 存储器图 (28)图7. 供电方案 (29)图8. 上电复位和掉电复位波形图 (33)图9. LDO在运行模式时,深睡眠模式下的典型电流消耗在不同的V DD时与温度的对比 (38)图10. LDO在低功耗模式时,深睡眠模式下的典型电流消耗在不同的V DD时与温度的对比 (39)图11. 待机模式下的典型电流消耗在不同的V DD时与温度的对比 (39)图12.V BAT的典型电流消耗(LEXT和RTC开启)在不同的V BAT电压时与温度的对比 (40)图13. 使用8 MHz晶体的典型应用 (42)图14. 外部高速时钟源的交流时序图 (43)图15. 使用32.768 kHz晶体的典型应用 (44)图16. 外部低速时钟源的交流时序图 (45)图17. HICK时钟精度与温度的对比 (46)图18. 建议的NRST引脚保护 (50)图19. SPI时序图– 从模式和CPHA = 0 (52)图20. SPI时序图– 从模式和CPHA = 1 (52)图21. SPI时序图–主模式 (52)图22. I2S从模式时序图(Philips协议) (53)图23. I2S主模式时序图(Philips协议) (54)图24. SDIO高速模式 (55)图25. SD默认模式 (55)图26. OTGFS时序:数据信号上升和下降时间定义 (56)图27. ADC精度特性 (59)图28. 使用ADC典型的连接图 (59)图29. V TS对温度理想曲线图 (60)图30. 比较器迟滞图 (61)图31. LQFP64 – 10 x 10 mm 64引脚薄型正方扁平封装图 (62)图32. LQFP64 – 7 x 7 mm 64引脚薄型正方扁平封装图 (64)图33. LQFP48 – 7 x 7 mm 48引脚薄型正方扁平封装图 (66)图34. QFN48 – 6 x 6 mm 48引脚正方扁平无引线封装图 (68)图35. QFN32 – 4 x 4 mm 32引脚正方扁平无引线封装图 (70)图36. 丝印示意图 (71)1 规格说明AT32F415系列微控制器基于高性能的ARM®Cortex®-M4 32位的RISC内核,最高工作频率达到150MHz,Cortex®-M4内核具有一组DSP指令和提高应用安全性的一个存储器保护单元(MPU)。
PM25是指大气中直径小于或等于25微米的颗粒物,也称为可入肺颗粒物。

PM2 5是指大气中直径小于或等于2 5微米的颗粒物,也称为可入肺颗粒物。
PM2.5PM2.5是指大气中直径小于或等于2.5微米的颗粒物,也称为可入肺颗粒物。
它的直径还不到人的头发丝粗细的1/20。
虽然PM2.5只是地球大气成分中含量很少的组分,但它对空气质量和能见度等有重要的影响。
与较粗的大气颗粒物相比,PM2.5粒径小,富含大量的有毒、有害物质且在大气中的停留时间长、输送距离远,因而对人体健康和大气环境质量的影响更大。
2011年12月5日,《环境空气质量标准》(二次征求意见稿)征求公众意见截止,新标准拟于2016年全面实施。
京津冀、长三角、珠三角三大地区及九个城市群可能会被强制要求先行监测并公布PM2.5的数据。
概念辨析污染较重的天气情况PM,英文全称为particulatematter(颗粒物)。
科学家用PM2.5表示每立方米空气中这种颗粒的含量,这个值越高,就代表空气污染越严重。
在城市空气质量日报或周报中的可吸入颗粒物和总悬浮颗粒物是人们较为熟悉的两种大气污染物。
可吸入颗粒物又称为PM10,指直径大于2.5微米、等于或小于10微米,可以进入人的呼吸系统的颗粒物;总悬浮颗粒物也称为PM100,即直径小于和等于100微米的颗粒物。
颗粒来源PM2.5产生的主要来源,是日常发电、工业生产、汽车尾气排放等过程中经过燃烧而排放的残留物,大多含有重金属等有毒物质。
一般而言,粒径2.5微米至10微米的粗颗粒物主要来自道路扬尘等;2.5微米以下的细颗粒物(PM2.5)则主要来自化石燃料的燃烧(如机动车尾气、燃煤)、挥发性有机物等。
健康损害气象专家和医学专家认为,由细颗粒物造成的灰霾天气对人体健康的危害甚至要比沙尘暴更大。
粒径10微米以上的颗粒物,会被挡在人的鼻子外面;粒径在2.5微米至10微米之间的颗粒物,能够进入上呼吸道,但部分可通过痰液等排出体外,另外也会被鼻腔内部的绒毛阻挡,对人体健康危害相对较小;而粒径在2.5微米以下的细颗粒物,直径相当于人类头发的1/10大小,不易被阻挡。
环境空气监测运维与质控简答题

1.《环境空气颗粒物(PM10和PM2.5)连续自动监测系统技术要求及检测方法》(HJ 653-2013 )中规定了PM10或PM2.5连续监测系统所配置监测仪器的测量方法、原理是什么?答案:PM10或PM2.5连续监测系统所配置监测仪器的测量方法为β射线吸收法和微量振荡天平法。
2.空气动力学当量直径指的是?答案:单位密度(ρ0=1g/cm3)的球体,在静止空气中作低雷诺数运动时,达到与实际粒子相同的最终沉降速度时的直径。
3. 简要回答对PM10和PM2.5连续监测系统进行验收申请前的验收准备工作有哪些。
答案:1)提供环境保护部环境监测仪器质量监督检验中心出具的产品适用性检测合格报告。
2)提供PM10和PM2.5连续监测系统的安装调试报告、试运行报告。
3)提供环境保护行政主管部门出具的联网证明。
4)提供质量控制和质量保证计划文档。
5)PM10和PM2.5连续监测系统已至少连续稳定运行60d,出具日报表和月报表。
其数据应符合GB3095-2012中关于污染物浓度数据有效性的最低要求。
6)建立完整的PM10和PM2.5连续监测系统的技术档案。
4. 已知颗粒物工况流量为16.85L/min,环境温度为30℃,环境大气压力为102.413KPa,求颗粒物的标况流量?答案:Q SN=16.85×273/273+30×102.413101.325=15.34 (L/min)5. TEOM微量振荡天平法测定颗粒物浓度的基本原理?答案:在质量传感器内使用一个振荡空心锥形管,在其振荡端安装可更换的TEOM滤膜,振荡频率取决于锥形管特征和其质量。
当采样气流通过滤膜,其中的颗粒物沉积在滤膜上,滤膜的质量变化导致振荡频率的变化,通过振荡频率变化计算出沉积在滤膜上颗粒物的质量,再根据流量、现场环境温度和气压计算出该时段颗粒物的质量浓度。
6. β射线法测定颗粒物的基本原理是什么?答案:β射线法测定颗粒物浓度的基本原理:利用β射线衰减量测试采样期间增加的颗粒物质量。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
H0010 1567 1 2000 1000 500000 10 Z-Axis
C om p ls p ls/rev Hz Hz [Ne xt]
程式編輯 6 PQR M K_ ? M K60 ? Prog Mon DnL UpL >> Del M?? VZ 0
K H KnX knY D >>
M K60 D_
PM_HPP
V1. 0
Sta t Sta te Jog Par am Uar t [Next]
PM_HPP
V1. 0
Sta t PassW [Next]
監控/上下載
D1000 D2000 X1 D1799 D1800 10 1567 ● H1000 B10011100
Dev Value Rdix
Row
PM
PM Soft
PM(含保密程式)
PM
套用保密程式 區塊設定 不套用保密程 式區塊設定
A
B
C
D
Case A: 將保密程式傳入PM 主機, 會詢問原保護密碼, 輸入正確後會更改程式保護密碼
Case B: 將保密程式傳入PM 主機, 並設定程式保護密碼
Case C: 直接將程式傳入PM 主機, 若所傳入的程式區塊, 已經存在於PM保密程式區中, 此時Download 流程會中斷.
Case D: PM Soft 不套用保密程式區塊設定, 將PM 程式傳入PM 主機
Upload 保密程式
在PMSoft 中執行Upload Program, 需先選取 PEP後, 輸入正確的保護密碼 才可將保密程式讀回
Ex:
OutLine
• 連續路徑 • 電子凸輪
– Motion Chart 主畫面說明 – 區段資料設定表單 – Motion Chart 功能簡介
Motion Chart 主畫面
位移座 標圖
速度座 標圖
加速度 座標圖
進入資料 設定表單
區段資料設定表單
區段編號 區段起始位置 區段結束位置 區段所需行程 曲線方程式
儲存表單資料 資料設定完成 載入表單資料 取消設定 清除表單資料 編輯方式: 使用者需先設定Start Ang, End Ang, Stroke以及透過下拉式選單選取CAM curve, 在設定完成後按下Setting completed按鈕, 即可在主畫面繪製位移, 速度, 加速度座標圖
Bac Api Mot G ALL _ 5 MNO
K H KnX knY D >> M_
Del 1 ABC M K60 D10 _ 0 ENT
VZ
LD LDP LDF LDI >>
MOV MOVP MMOV >>
LD LDP LDF LDI >>
Q&A
• Monitor的方式同TP04/08(只實現按鈕/靜態文字/數 值輸入顯示)? • SD卡放G碼?
寸 動/參數
Jog X: 0.00 05 Y: 0.0005 Z: 0.0005 [ABS] INC -x(4) -y(1)
+ z(8) + y(9 ) + x(6) -z(2)
Sp eed :2000 mm /sec
Sp eed
Pola ri in put Par am eter Backla sh Pulse ra t Fe ed r at Ma x.SP Bia s.SP X- Axis Y- Axis
OutLine
• 連續路徑 • 電子凸輪
– Motion Chart 主畫面說明 – 區段資料設定表單 – Motion Chart 功能簡介
• 保密程式區塊
– 設定保密程式區塊 – Download 保密程式到PM主機 – Upload 保密程式到PC
• PMHPP 的程式編輯方式
設定保密程式區塊
• 保密程式區塊
– 設定保密程式區塊 – Download 保密程式到PM主機 – Upload 保密程式到PC
• PMHPP 的程式編輯方式
PMHPP 的程式編輯
顯示區 共7行
功能鍵 顯示區
Line Line Line Line Line Line Line
1 2 3 4 5 6 7
ABC
Dispp la y Area
連續路徑
連續路徑
連續路徑
OutLine
• 連續路徑 • 電子凸輪
– Motion Chart 主畫面說明 – 區段資料設定表單 – Motion Chart 功能簡介
• 保密程式區塊
– 設定保密程式區塊 – Download 保密程式到PM主機 – Upload 保密程式到PC
• PMHPP 的程式編輯方式
1 DEF GHI 2 3 4 MNO PQR 5 6 7 VWX YZ< > 8 9 .
> ,|
JKL
Fun1
Fun2
Fun3
Fun4
Fun5
ST U
0 = ,&
±
< ,^
Shift Clr >=
←
<=
功能鍵
鍵盤輸入區 (同手機方式) 例: 1ABC1
主視窗
PM_HPP
V1. 0
Pro g M on DnL UpL [Next]
PM
PLC程式 設備廠
G碼/塊
在System Information 中展開Block Setting選項後, 使用者可以設定需要加密 的程式區塊(O100, Ox0~Ox99, P0~P255)
Ex: 設定Ox0為保密程式區塊
滑鼠點選 Enable Protection
• PMHPP 的程式編輯方式
OutLine
• 連續路徑 • 電子凸輪
– Motion Chart 主畫面說明 – 區段資料設定表單 – Motion Chart 功能簡介
• 保密程式區塊
– 設定保密程式區塊 – Download 保密程式到PM主機 – Upload 保密程式到PC
• PMHPP 的程式編輯方式
Dow nloa d p rog ra m PM _HPP→PM Che cksum = 0x1234 5878 PM che cksum = 0x88029033 Yes No
Up loa d p rog ra m PM →PM_HPP Che cksum = 0x1234 5878 PM che cksum = 0x88029033 Yes No
20PM 新增功能簡介
Rick.wu 2008-03-31
1
OutLine
• 連續路徑 • 電子凸輪
– Motion Chart 主畫面說明 – 區段資料設定表單 – Motion Chart 功能簡介
• 保密程式區塊
– 設定保密程式區塊 – Download 保密程式到PM主機 – Upload 保密程式到PC
Motion Chart 功能簡介
Draw: 依照區段資料的設定, 畫出相對應的位移, 速度, 加速度圖形
Draw Imported Graph: 依照以匯入的位移座標資料計算出速度以及加速度資料, 並且畫出位移, 速度, 加速度圖形
Clear: 清除畫面上位移, 速度, 加速度等圖形
Import: 匯入預設的位移座標資料檔, 依照位移座標資料計算出速度以及加速度資料, 並且畫出位移, 速度, 加速度圖形
Export: 將目前圖形的座標資料做匯出到預設的檔案
Round: 對座標資料進行四捨五入到整數
Motion Chart 功能簡介
Displacement: X_Max: 位移座標圖上X軸的最大值 (Default: 360) Y_Max: 位移座標圖上Y軸的最大值 (Default: 100) Resolution: 區段數量 (Default: 256) Note: 使用者可以視需求自行設定X_Max, Y_Max, Resolution的數值 Velocity: Y_Max: 速度座標圖上Y軸座標的最大值 Y_Min: 速度座標圖上Y軸座標的最小值 Note: 使用者可以視需求自行設定Y_Max, Y_Min的數值 Acc.: Y_Max: 加速度座標圖上Y軸座標的最大值 Y_Min: 加速度座標圖上Y軸座標的最小值 Note: 使用者可以視需求自行設定Y_Max, Y_Min的數值
Download 保密程式
在PMSoft 中執行Download Program, 需先選取Apply Block Setting 並輸入保護密 碼, 以便套用保密程式區塊的設定 Ex: 資料傳送視窗
選取套用保 密程式區塊 設定
Download 保密程式 (Continue)
執行Download 保密程式可能發生的狀況: