基于NI Single Board RIO的机器人开发
基于NISingle—Board.RIO创建独特机器人控制方案

度 (5 1DOF )数据手套 ( )和生成力矢量控 通 常 情 况 下 , 我 们 将 一 个 测 压 元 件 放 在 末 端 执 图1
行 器 上 来 实 现 这 种 控 制 方 案 。 然 而 , 机 器 人 动 力 学 的 控 制 算 法 必 须 进 行 分 析 才 能 确 保 稳 定
议 , 通 过 电 子 界 面 子 卡 连 接 至 数 据 手 套 , 电 子 压 阻 式 力 传 感 器 、 驱 动 力 传 感 器 的 子 卡 、 位 于
界 面 子 卡 位 于NISn l— adR O设 备 顶 端 ,满 手 背 上 的 I ige Bor I MU以及 运 行NI a VIW 系统 设 计 软 b E L 足了对于空间的需求。
人 ~
.
RI 6 由度 机 器 人 ,界 面 中 包 含 了 第 三 方 制 O的 自
为 了 克 服 了 这 个 问 题 ,我 们 将 力 传 感 器 的
造 商 的硬 件 ,还 包 含 一 个 I MU、一 个 1 自由 度 的 负 荷 元 件 从 机 器 人 末 端 执 行 器 转 移 到 用 户 的 手 5
典型机器人控制界面
借 助 于 端 点 力 控 制 方 案 ,机 器 人 末 端 执 行
村 L
手 持 设 备 上 获 取 力 的 读 数 ,采 集 与 分 析 1 自 由 器 能 够 感 应 用 户 所 施 的 力 量 , 实 现 自 由 运 动 。 5
n 器 人 运 动 的_性 测 量 单 元 上 的 数 据 的 便 携 l l 制机 惯 n 面 。UPM— SC自动 化 与 机 器 人 中心 Le n l 式界 CI o e
I 技术前沿 l rnire h oo y o t c n lg F eT
利用LabVIEW进行机器人控制和编程
利用LabVIEW进行机器人控制和编程机器人控制和编程是现代科技领域的重要研究方向之一。
随着技术的不断进步,人们对机器人的需求越来越高,机器人在工业、医疗、军事等领域扮演着越来越重要的角色。
而LabVIEW作为一种强大的图形化编程语言和开发环境,提供了便捷而灵活的方式来实现机器人控制和编程。
本文将介绍如何利用LabVIEW进行机器人控制和编程。
1. 背景介绍随着机器人应用的广泛普及,人们对机器人的控制和编程需求越来越高。
传统的机器人控制和编程方式往往需要繁琐的代码编写和复杂的硬件连接,这给非专业人士带来了很大的困扰。
而LabVIEW通过其图形化编程的方式,简化了机器人控制和编程的流程,使得非专业人士也能轻松上手。
2. LabVIEW的特点LabVIEW是一种基于数据流编程的图形化编程语言,其主要特点如下:- 图形化界面:LabVIEW提供了直观、交互式的图形化界面,用户可以通过简单的拖拽和连接来构建程序,降低了学习和使用的难度。
- 多平台支持:LabVIEW支持在不同操作系统下运行,包括Windows、Mac和Linux等,适用于不同开发环境。
- 丰富的函数库:LabVIEW内置了大量的函数库,包括用于控制、传感器读取、通信等功能,方便用户进行开发。
- 与硬件的高度集成:LabVIEW提供了丰富的硬件支持,可以轻松与各种传感器、执行器和机器人平台进行集成。
3. LabVIEW在机器人控制和编程中的应用利用LabVIEW进行机器人控制和编程可以实现以下功能:- 传感器读取与数据处理:LabVIEW可以读取各种传感器的数据,并对数据进行处理和分析,例如机器人的视觉感知、距离测量等。
- 运动控制和路径规划:LabVIEW可以对机器人进行运动控制,包括轨迹规划、速度控制等,实现精确的运动控制。
- 人机交互界面设计:LabVIEW提供了丰富的用户界面设计工具,可以轻松设计人机交互界面,方便用户与机器人进行交互。
NI Single-Board RIO产品选择指南

NI Single-Board RIO产品选择指南概览NI Single-Board RIO嵌入式系统共有八种,从仅仅包含数字I/O的系统直至带有多种模拟、数字、工业I/O的系统。
首先需要确定最适合应用的配置,然后选择扩展I/O,并且根据系统需要选择配件。
可以按照以下步骤,建立NI Single-Board RIO嵌入式系统。
步骤1:选择NI Single-Board RIO嵌入式设备步骤2:选择C系列I/O模块如果需要特定主板上没有包含的附加I/O,最多可以将三块板卡专用的C系列模块连接到任一款NI Single-Board RIO嵌入式系统中。
如果您在NI Single-Board RIO的应用中需要C系列模块,但是该模块还没有被转换为板卡专用版本,请联系NI,确定是否可以得到板卡专用版本,或是新建一块板卡。
图2:对于60多种C系列I/O和通讯模块而言,工程师最多可以连接三块板卡为任何Single-Board RIO产品增加I/O功能,或是构建自己定义的I/O模块。
板卡专用的C系列模块使用与NI CompactRIO和NI CompactDAQ C系列模块现有产品线相同的电路,但是在构建系统的时候没有使用NI Single-Board RIO所需要的机械隔离。
无需使用隔离意味着可以将模块放置地更为靠近,从而减小系统的封装尺寸。
无需使用隔离同样还意味着移除了模块外面的屏蔽,从而使它更容易受到周边环境变化的影响(例如温度变化)。
由于这些变量的影响,板卡专用C系列模块的规范可能与封闭式C系列模块的规范略有不同。
因此在系统隔离的辅助下,有可能提高到超过板卡专用C系列模块的标称规范的水平。
除了板卡专用C系列模块之外,整个与CompactRIO兼容的C系列模块产品线同样还能够与NI Single-Board RIO兼容。
带有隔离的C系列模块比板卡专用C系列模块尺寸稍大,因此会覆盖相邻的NI Single-Board RIO扩展槽。
基于NI LabVIEW机器人起步包建立一个移动式机器人

摆动传感器 ii. 操纵 向量场直方图随摆动传感器检测到的对象而变化。 更新向量场直方图
基于 NI LabVIEW 机器人起步包建立一个移动式机 器人
本入门指南引导你通过使用 NI LabVIEW 机器人起步包建立一个移动式机
器人。该原型使用 LabVIEW
2009、LabVIEW 实时和 FPGA 模块对 NI
sbRIO-9631 设备进行编程。通过本文档,可以学习如何建立一个能在自己的
路径上扫描对象并重新进行路径规划的可移动机器人。
1. 必备部件
产品包括
NI LabVIEW 机器人起步包
sbRIO-9631
嵌入式 FPGA 技术
LabVIEW 2009
LabVIEW 机器人模块 LabVIEW FPGA 模块 LabVIEW 实时模块 24 V 电池充电器 视差超声波传感器 机壳, 两个驱动马达, 行星齿轮系统 2. 软件安装 插入 NI LabVIEW 机器人起步包附带的 DVD 盘,按照屏幕上的指示进行 安装。当你完成安装后,请重启计算机。在此期间,使用件 连接传感器,电源线及路由器网线 a. 将分组的信号线穿过传感器并与接插件连接。 b. 将传感器连接到驱动马达上。 c. 连接电源线并打开 MASTER 开关。 d. 用网线连接路由器和控制板。 II. 运行硬件配置向导 如果向导没有自动启动,请从你的 Windows 开始菜单中打开。按照屏幕 上的指示进行连接并请确认你的硬件设置包含了传感器方位和电机测试。
按照启动向导步骤 1-5,完成硬件配置。 III. 创建新的机器人项目 使用自动启动的机器人项目向导来配置你的机器人项目,在 LabVIEW 启 动画面的新建(Create New)栏目中选择机器人项目(RoboTIcs Project)。 a. 在第一个屏幕上选择机器人起步包(RoboTIcs Starter Kit),接着选择下 一步。 b. 在第二个屏幕上,输入机器人的 IP 地址。IP 地址可以从硬件配置中获 得,也可以从 NI MAX(Measurement & AutomaTIon Explorer)软件的远程 系统中得到,之后选择下一步进入下一个窗口。 c. 选择一个项目名并将其保存在一个文件夹里。选择完成。 IV. 硬件编程 一旦机器人项目向导完成了项目配置,它会打开 Roaming.vi.,阅读这个 VI 的前面板以确定是否所有的配置都正确。
使用LabVIEW进行机器人控制和编程

使用LabVIEW进行机器人控制和编程LabVIEW(Laboratory Virtual Instrument Engineering Workbench)是一种功能强大的系统设计软件,它被广泛应用于各种科学和工程领域。
LabVIEW提供了一种直观的编程环境,可以帮助工程师和科学家们进行数据采集、测量仪器控制和机器人控制等任务。
本文将介绍如何利用LabVIEW进行机器人控制和编程,并探讨其在实际应用中的优势和挑战。
一、LabVIEW简介及其在机器人领域的应用LabVIEW是由美国国家仪器公司(National Instruments)开发的一款图形化编程语言。
它采用了数据流编程的模型,用户只需要通过拖拽和连接图标来构建程序,而无需编写传统的文本代码。
这种独特的编程方式使得LabVIEW在机器人控制领域具有广泛的应用价值。
在机器人控制方面,LabVIEW可以通过与硬件设备的连接,实现对机器人的精确控制。
LabVIEW支持多种通讯协议和接口,包括串口、以太网、USB等,可以方便地与各种类型的机器人进行通信。
此外,LabVIEW还提供了丰富的机器人控制工具包,用户可以利用这些工具包来实现机器人的运动控制、传感器读取以及任务调度等功能。
二、LabVIEW在机器人编程中的优势1. 直观易用:相比传统的文本编程语言,LabVIEW的图形化编程方式更加直观和易于理解。
通过拖拽和连接图标,用户可以直观地表示程序的数据流和控制逻辑,提高了编程效率和可读性。
2. 高度可扩展:LabVIEW拥有庞大的软件模块和工具包生态系统,用户可以从中选择适合自己需求的模块,并进行二次开发和扩展。
这种高度可扩展性使得LabVIEW成为了一个全能的机器人编程平台,适用于各种不同类型和规模的机器人项目。
3. 多任务并发:LabVIEW支持多任务并发执行,可以同时控制多个机器人的不同动作和任务。
这种并发执行的特性为机器人的协调运动和复杂任务分配提供了便利,实现了更高效的机器人控制。
NI LabVIEW设计简单机器人的系统概述
NI LabVIEW 设计简单机器人的系统概述
由美国国家仪器公司工程师搭建的演示平台NIRo 是一种小型的无人地面车辆,它的组件都是从当地商店中购买的商用现货。
控制系统在集成了FPGA 和实时处理器的NI Single-Board RIO 嵌入式平台上实现。
1. 部件概述
NIRo 实现高效导航和避障需要几个关键硬件组件:
嵌入式控制器– 用于传感器数据采集、决策和电机控制。
红外线传感器– 用于探测机器人平台两侧和后方一定距离内的目标。
超声波传感器– 用于探测机器人前方的目标,因为前方覆盖了较大的区域。
H 桥– 用于控制电池至电机的电流方向,使电机前进或后退。
LabVIEW在机器人控制系统中的应用

LabVIEW在机器人控制系统中的应用随着科技的不断进步,机器人在各个领域的应用日益广泛。
在机器人控制系统中,LabVIEW作为一种强大的开发工具,被广泛应用于机器人的控制与监测。
本文将探讨LabVIEW在机器人控制系统中的应用,并分析其优势以及未来发展的前景。
一、LabVIEW在机器人控制系统中的概述LabVIEW(Laboratory Virtual Instrument Engineering Workbench)是一种由美国国家仪器公司(National Instruments)开发的图形化编程语言和软件开发环境。
它以图形化的界面和数据流程方式,使得用户能够轻松地创建和调试复杂的控制系统。
在机器人控制领域,LabVIEW常被用于设计、模拟和实现机器人控制算法,并与机器人硬件进行交互。
二、LabVIEW在机器人控制系统中的应用领域1. 机器人路径规划和导航LabVIEW可以实时地监测机器人的位置和方向,利用其图形化编程能力,通过算法和传感器数据,实现对机器人的路径规划和导航。
通过LabVIEW开发的机器人控制系统,可以使机器人在未知环境中自主地避障、规划最优路径,并实现目标点的定位和导航。
2. 机器人手臂运动控制LabVIEW具有强大的控制算法和信号处理能力,可以用于机器人手臂的运动控制。
通过将机器人手臂关节的位置传感器和执行机构与LabVIEW进行连接,可以实现对机器人手臂的准确控制,并完成各种复杂任务,如抓取、装配等。
3. 机器人视觉系统机器人视觉系统在机器人控制中起着关键作用,而LabVIEW提供了丰富的图像处理和计算机视觉工具。
利用LabVIEW的视觉模块,可以实现对机器人视觉系统的集成和开发。
例如,通过图像识别和跟踪算法,实现机器人的目标检测和物体抓取。
4. 机器人协作与通信在多机器人协作和通信方面,LabVIEW同样具备强大的功能。
开发者可以使用LabVIEW来设计机器人之间的通信协议和数据传输方式。
基于LabVIEW的解魔方机器人设计
基于LabVIEW的解魔方机器人设计1. 内容综述随着科技的快速发展,自动化与智能化成为现代机器人技术的重要发展方向。
解魔方机器人作为一种典型的智能机器人应用,不仅体现了现代科技的创新与突破,更展现了人工智能在日常生活领域的广泛渗透与应用。
基于LabVIEW平台的解魔方机器人设计已经成为一个研究热点。
基于LabVIEW的解魔方机器人设计旨在利用图形化编程环境LabVIEW的强大功能,结合机器视觉、自动控制、人工智能等技术,实现机器人的自主化魔方解决过程。
这一设计涵盖了机器人的硬件结构设计、图像识别处理、算法开发等多个方面,具有高度的技术集成性和挑战性。
在硬件结构设计方面,主要考虑到机器人的结构合理性、耐用性以及灵活性等要素,以适应魔方各个面的变化,并实现对魔方的快速抓取与操作。
而在图像识别处理方面,通过机器视觉技术捕捉魔方状态,并通过图像识别算法对魔方状态进行解析,将其转化为机器人的操作指令。
算法开发是解魔方机器人设计的核心部分,包括路径规划、决策制定等智能算法的应用,使机器人能够独立完成魔方解决过程。
这一设计的成功实现,不仅能够推动智能机器人的技术进步,更能够为日常生活带来极大的便利。
在家庭娱乐、教育科普等领域,解魔方机器人的应用将极大地激发人们的兴趣和好奇心,推动智能科技的普及。
该设计也能够为工业生产、竞赛等领域提供全新的解决方案和技术支持。
基于LabVIEW的解魔方机器人设计是一个综合性强、挑战性高的项目,涵盖了机器人技术、人工智能、机器视觉等多个领域。
其成功实现将为智能机器人的技术进步与应用拓展提供重要的推动力。
在接下来的章节中,我们将详细介绍该设计的关键技术、方法以及实施步骤等。
2. 系统总体设计机械结构:解魔方机器人采用了一种两臂结构,以实现高效的魔方操作。
机械结构的设计要求包括结构的稳定性、灵活性以及易于装配和维护。
运动控制系统:运动控制系统是机器人的核心部分,负责驱动电机,实现各轴的运动。
NI嵌入式创新应用开发平台myRIO介绍

全新学生嵌入式系统设计平台NI myRIO简介1. 概述NI myRIO是NI针对教学和学生创新应用而最新推出的嵌入式系统开发平台。
NI myRIO内嵌Xilinx Zynq芯片,使学生可以利用双核ARM Cortex-A9的实时性能以及Xilinx FPGA可定制化I/O,学习从简单嵌入式系统开发到具有一定复杂度的系统设计。
NI myRIO的便携性、快速开发体验以及丰富的配套资源和指导书,使学生在较短时间内就可以独立开发完成一个完整的嵌入式工程项目应用,特别适合用于控制、机器人、机电一体化、测控等领域的课程设计或学生创新项目。
由于NI myRIO是一款针对学生创新应用的平台,因此在产品开发之初即确定了以下重要特点:✓易于上手使用:引导性的安装和启动界面可使学生更快地熟悉操作。
✓编程开发简单:支持用LabVIEW或C/C++对ARM进行编程,LabVIEW中包含大量现成算法函数,同时针对NI myRIO上的各种I/O接口提供经过优化设计的现成驱动函数,方便快速调用,甚至比使用数据采集(DAQ)设备还要方便;如果学生需要对FPGA进行自定义编程,可采用LabVIEW图形化编程方式进行开发。
✓安全性:直流供电,根据学生用户特点增设特别保护电路。
✓便携性同时,NI myRIO是一款真正面向实际应用的学生嵌入式开发平台。
NI myRIO采用NI工业级标准可重配置I/O (RIO) 技术,与NI其他工业级的嵌入式监测与控制开发平台(如NI CompactRIO及NI Single-Board RIO)具有相似的系统结构和开发体验,学生通过NI myRIO获得相应的经验后可将其用于其他更加复杂的工业嵌入式应用开发或相关科研项目。
2. 型号与规格NI myRIO分为NI myRIO-1900与NI myRIO-1950两种型号,两种型号的主要区别是NI myRIO-1900带有外壳,同时多一组I/O接口,并支持Wifi连接。
基于NI myRIO的移动机器人电气控制研究与实现
32 | 电子制作 2021年03月台。
职业院校作为培养技能型人才主阵地,大力发展和弘扬职业教育是制造业转型升级的必经之路,移动机器人项目作为制造与工程技术领域的项目之一,推广移动机器人项目的技术应用,对培养具有工程思维的技能人才有着积极的意义。
1 传感器介绍与编程实现■1.1 红外传感器红外测距传感器是一种传感装置,是用红外线为介质的测量系统,测量范围广,响应时间短。
红外测距传感器是由一个红外信号发射二极管和一个接收二极管组成,通过发射二极管发射出的红外光,在照射到物体后会发生反射的原理,反射光被接收二极管吸收,通过接收二极管吸收光线的强弱情况,由信号处电路处理后转换为与物体的距离。
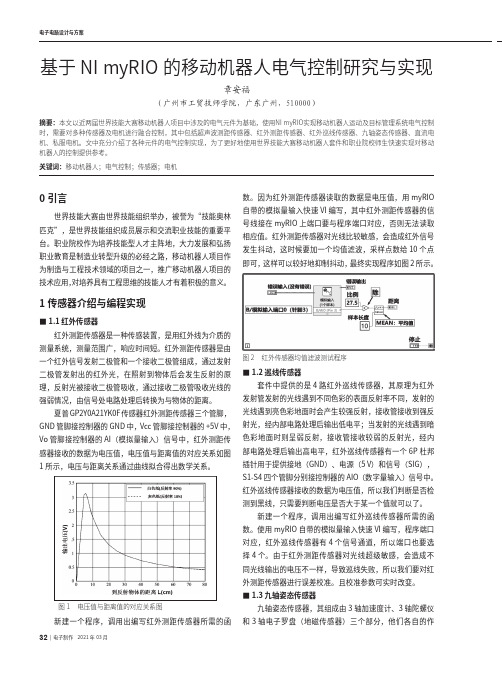
夏普GP2Y0A21YK0F传感器红外测距传感器三个管脚,GND 管脚接控制器的GND 中,Vcc 管脚接控制器的+5V 中,Vo 管脚接控制器的AI(模拟量输入)信号中,红外测距传感器接收的数据为电压值,电压值与距离值的对应关系如图1所示,电压与距离关系通过曲线拟合得出数学关系。
图1 电压值与距离值的对应关系图新建一个程序,调用出编写红外测距传感器所需的函发生抖动,这时候要加一个均值滤波,采样点数给10个点即可,这样可以较好地抑制抖动,最终实现程序如图2所示。
图2 红外传感器均值滤波测试程序■1.2 巡线传感器套件中提供的是4路红外巡线传感器,其原理为红外发射管发射的光线遇到不同色彩的表面反射率不同,发射的光线遇到亮色彩地面时会产生较强反射,接收管接收到强反射光,经内部电路处理后输出低电平;当发射的光线遇到暗色彩地面时则呈弱反射,接收管接收较弱的反射光,经内部电路处理后输出高电平,红外巡线传感器有一个6P 杜邦插针用于提供接地(GND)、电源(5 V)和信号(SIG),S1-S4四个管脚分别接控制器的AIO(数字量输入)信号中。
红外巡线传感器接收的数据为电压值,所以我们判断是否检测到黑线,只需要判断电压是否大于某一个值就可以了。
基于LabVIEW的按键力与行程采集机器人系统

以特斯拉为代表的新能源汽车搭载的高性能中控屏正在快速普及,可为驾驶者提供多维度沉浸式体验[1]。
虽然车载触控屏集成了多样化的人机交互功能,但汽车厂商仍会保留必要的实体按键,如双闪灯、车窗升降和方向盘辅助开关等[2]。
从视觉体验方面考虑,设计实体按键不仅可以丰富内饰细节,而且能提升汽车的品质[3-4],因此,实体按键不会完全消失。
市场需要更加美观舒适、符合人体工程学设计的实体按键,这就对其外观材质、性能水平、质量评估等方面提出了更高的要求[5]。
在产品交付阶段,汽车零部件供应商需要给整车厂商提供完整的检测报告,按键手感测试类项目是其中关键的指标项。
传统按键手感测试设备通常采用拉伸压缩试验台架和电子式万能试验机,以力传感器单自由度移动、被测按键对中固定操作模式最为常见,但此方式存在以下弊端[6-7]:①多按键产品须依次调整测力点位置并重复装夹,劳动强度大,长时间操作容易导致操作人员疲劳且测试效率也较低;②每次测量都需要操作人员寻找点位,存在定位误差,造成同一批次产品不同时间段测量结果有较大差异,不能满足产品重复测量一致性要求;③传感器主轴无法偏转角度,难以适用于平整表面、弧形表面和拨杆组合按键产品,灵活度不高,拓展性不强。
针对传统设备自动化程度低、重复装夹造成的测量误差大等现状,本文设计了用于采集按键力与行程的机器人系统,优点在于测试过程高度自动化,操作人员可将更多精力用于评定按键手感差异,而设备的自动化工作流程可降低手工操作的失误率,提高按键状态的一致性;机器人重复定位精度高且选配的工业级精密传感器可保证系统重复测量数据的稳定性,减少了设备本身的精度误差对按键手感测试造成的影响;6关节机械手拥有更多的空间自由度,可更换不同类型的夹头,适用于多种类按键产品的手感测试任务,且可控制末端操作器垂直于按键表面,确保了采集数据的精准度。
整套测控系统可应用于实验室精密测量领域。
1 测控系统设计测控系统主要由机械手运动控制模块①、力采集模块②、行程采集模块③、NICompactRIO控制平台(cRIO9039)④和个人计算机⑤组成,总体系统结构如图1所示。
LabVIEW的机器人控制实现智能化操作
LabVIEW的机器人控制实现智能化操作机器人技术在现代工业生产中扮演着越来越重要的角色。
随着科技的不断发展,人们对机器人的要求也越来越高,特别是希望机器人能够实现智能化操作。
在这方面,LabVIEW作为一种功能强大的程序设计工具,可以帮助实现机器人的智能化控制。
本文将介绍LabVIEW在机器人控制方面的应用和实现智能化操作的方法。
一、LabVIEW在机器人控制中的应用1. 数据采集和处理:LabVIEW提供了丰富的传感器接口和数据处理函数,可以方便地读取和处理机器人的传感器数据,并进行实时监测和分析。
例如,可以通过LabVIEW读取机器人的视觉传感器数据,实现视觉识别和目标跟踪等功能。
2. 运动控制:LabVIEW可以通过控制机器人的执行器(如伺服电机、液压缸等)实现机器人的精确运动控制。
利用LabVIEW的运动控制模块,可以编写程序实现机器人的轨迹规划、速度控制和位置控制等功能。
3. 通信与联网:LabVIEW支持各种通信协议,可以与其他设备(如PLC、传感器等)进行数据交换和通信。
通过与物联网技术的结合,可以实现机器人的远程监控和控制,提高机器人的灵活性和智能化水平。
二、实现机器人智能化操作的方法1. 人工智能算法的应用:LabVIEW提供了丰富的人工智能算法模块,如神经网络、模糊控制等,可以应用于机器人的自主决策和智能化操作。
通过建立合适的算法模型,并结合机器人的传感器数据,可以实现机器人的自主避障、路径规划和智能抓取等功能。
2. 视觉识别与图像处理:LabVIEW具备强大的图像处理和模式识别功能,可以应用于机器人的视觉识别和图像处理。
例如,利用LabVIEW的图像处理模块,可以实现机器人的目标检测、图像跟踪和视觉导航等功能,提高机器人在复杂环境中的智能化水平。
3. 数据挖掘和机器学习:LabVIEW可以与各种数据挖掘和机器学习算法进行集成,通过分析机器人的历史数据,可以实现机器人的行为学习和优化。
基于LabVIEW和NI myRIO的移动机器人系统设计
基于LabVIEW和NI myRIO的移动机器人系统设计作者:***来源:《中国教育技术装备》2020年第13期摘要依托世界移动机器人技能大赛背景需求,采用中德栋梁移动机器人平台,基于LabVIEW和NI myRIO进行移动机器人控制系统的设计,借助直流电机、伺服舵机及传感器等,实现移动机器人的基本运动、智能距离检测及路径自主循迹等功能。
实验结果表明,该系统能较好地完成移动机器人的基本运动以及智能距离检测的路径自主循迹功能。
此外,该系统还设计了完善的用户操作界面,且具有高效灵活、可扩展性强和较好的兼容性等特点,对探究智能移动机器人的发展方向具有重要意义。
关键词 LabVIEW;NI myRIO;移动机器人;控制系统中图分类号:TP242 文献标识码:B文章编号:1671-489X(2020)13-0027-031 引言移动机器人是机器人领域的重要组成部分,目前广泛应用于工业生产并在社会服务方面发挥重要作用。
我国的移动机器人产业起步晚,但是随着智能制造的发展浪潮以及“中国制造2025”的提出,移动机器人技术将会迎来新的发展阶段 [1]。
该设计以“第44届世界技能大赛移动机器人项目”为背景,采用中德栋梁移动机器人平台,该平台模块资源丰富,底层配置模块完善,更有利于聚焦移动机器人的功能设计[2]。
该比赛中的走廊区为移动机器人自主路径循迹区,机器人从起点位置出发,自主循迹通过走廊,沿途不能碰到走廊墙壁;通过走廊区后进入下一个比赛区,完成后面的任务后,还要再回来自动循迹通过走廊区以返回到起点。
基于以上控制要求,本文设计一种基于LabVIEW和NI myRIO的路径规划及循迹的移动机器人控制系统。
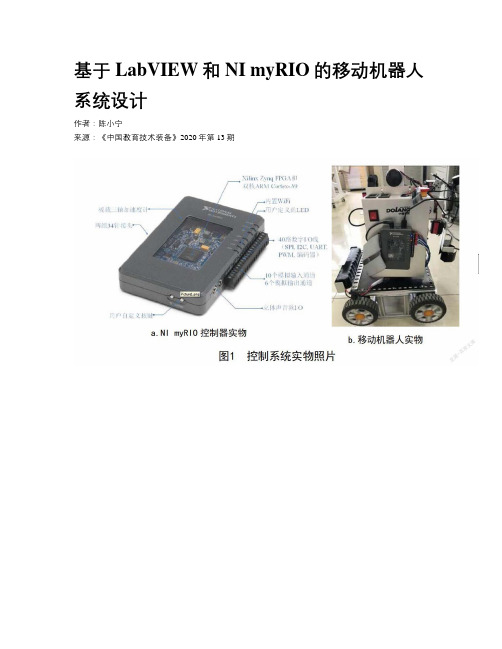
2 控制系统结构该智能距离检测循迹的轮式机器人是基于NI myRIO设计的,能够借助智能距离检测实现对预设方向路径的自主循迹。
其中,NI myRIO实物和移动机器人实物如图1所示。
移动机器人硬件由控制器、驱动电路、多种传感器及电源模块等组成。
机器人设计开发中的三大挑战及相应的应对方法

机器人设计开发中的三大挑战及相应的应对方法关键字:机器人无人驾驶车辆NIWeek机器人设计引言机器人的研究与开发是当今学术界和工业界的热点之一,机器人的发布数量较之过去有明显增长,2010年机器人市场规模预计将达到4700亿美元。
过去人们往往只能在实验室或高科技竞赛中见到机器人的身影,而如今它们已经走入工业应用甚至是普通人的生活中[1]。
现在,机器人应用所覆盖的领域包括无人驾驶车辆、险情救援、个人与服务机器人、医疗机器人、农业与采矿、教育与智力开发等,并且随着科技的发展,机器人的应用领域还在不断扩展。
但是机器人的快速发展也为该领域的研究与开发人员带来了巨大的挑战。
机器人领域的著名科学家DavidBarrett博士(曾任iRobot 公司副总裁、迪士尼梦幻工程公司主管,现任美国Olin学院SCOPE 项目主管,)在2009年NIWeek图形化系统设计会议上总结了当前机器人开发所面临的三大挑战:创造更小、更轻、更强大的电池;创造更小、更轻、更强大的执行机构;需要一个工业级的、并且具有良好兼容性的软件开发平台。
这些挑战也获得了业内其他领导者的响应:Segway思维车的发明人、FIRST机构及DEKA研发公司的创始人DeanKamen表达了对机器人开发中传统嵌入式方法的顾虑;美国国防部地面机器人和自主系统主管EllenPurdy关注于自主系统的进一步标准化和持久性(电池能力)需要;韩国浦项智能机器人研究所的HeeChangMoon博士强调了对于集成的嵌入式系统以及直观式开发软件的需求。
认识到这些挑战,世界各地的业内人士都在努力寻求这些挑战的解决之道:DeanKamen的团队选择NILabVIEW软件和NICompactRIO嵌入式硬件平台用于FIRST项目中的机器人自主控制系统开发;TORC科技公司从传统的编程工具转而使用NILabVIEW软件平台设计其复杂的自主系统,其CEOMichaelFleming在NIWeek会议上特别谈到了TORC如何从功能强大的高级软件中获益,从而有助于简化系统设计中的复杂问题。
机器人:在一个月之内实现原型开发的四个平台

机器人:在一个月之内实现原型开发的四个平台目录1.使用LEGO MINDSTORMS NXT 进行原型开发2.使用iRobot Create 进行原型开发3.使用NI Single-Board RIO 和NI CompactRIO 进行原型开发4.使用Mobile Robots Inc.进行原型开发从工业自动化机器直至模仿人类行为的类人机器人,都要求使用当今最高级的控制系统和复杂机械结构。
机器人通常部署在动态环境中,这使得开发更具挑战。
即便是最先进的软件仿真也无法仿真现实环境中的所有变量。
要了解机器人在投入实际应用前如何响应不同的状况,功能原型是十分重要的。
将NI LabVIEW 图形化系统软件与商用硬件整合在一起,您可以在一个月内开发软件,并完成功能齐全的原型系统。
您需要根据一系列因素进行开发平台的选择,其中包括价格、灵活性、I/O 数量、处理器速度、坚固性和板载传感器。
一些用于原型开发的通用平台使用了LEGO®MINDSTORMS®NXT、嵌入式NI CompactRIO 和NI Single-Board RIO 系统。
表1 提供了可用平台的比较。
表1:针对不同应用和价位的机器人都有相应的原型开发平台。
使用LEGO MINDSTORMS NXT 进行原型开发LEGO MINDSTORM NXT 包含智能的、用于计算机控制的LEGO 模块,是预算较少的情况下进行原型开发的理想选择。
它包含32 位ARM 微控制器,可以用于和多种传感器及电机一起使用。
通过使用用于LEGO MINDSTORMS NXT 的LabVIEW 工具包,您可以创建程序并直接下载到NXT 模块上。
NXT。
LabVIEW与 NI Single- Board RIO 开发新型生物反应平 台

LabVIEW与 NI Single- Board RIO 开发新型生物反应平台"我们发现, LabVIEW与 NI硬件能够实现任意的组合配置以满足我们的需要,从而实现快速开发,并在整个产品生命周期内不断改进。
此外,最重要的是,控制器的结构简单而且紧凑。
"- Daniel Giroux, PBS Biotech Inc.The Challenge:设计一个新颖、一次性使用的生物反应器,具有高性能且便于使用,使之在同类产品中的中脱颖而出。
The Solution:使用NI LabVIEW和 NI 单板 RIO,以一个通用控制平台开发一个集成的生物反应器。
我们的PBS的生物反应平台的设计需要比现有的产品性能更好,更易于使用。
Author (s):Daniel Giroux - PBS Biotech Inc.生物反应器是培养哺乳动物细胞的平台,用来生产以细胞为来源的药品和疫苗。
生物反应器必须精确地执行多项任务,包括:将培养物与潜在微生物污染隔离,保持细胞悬浮在培养液中,精确控制温度、 pH值和溶解氧含量。
我们的PBS的生物反应平台的设计需要比现有的产品性能更好,更易于使用。
为了实现这些目标, PBS生物反应器需要设计紧凑化、集成化。
在一个预先设定的模块化单元内将容纳培养皿和一个集成式的控制器两部分。
这些生物反应器提供有多种尺寸,以满足制造商的各种需求。
我们设计目标是使得全系列的PBS生物反应器都能共享一个控制平台。
使用NI Single- Board RIO 和 LabVIEW开发快速原型、构建灵活应用传统的生物反应器和生物处理平台使用标准的控制平台,如可编程逻辑控制器(programmable logic controllers, PLC)和带有自定义硬件的分布式控制系统(distributed control systems, DCS)。
我们决定使用NI提供的商业现成可用硬件,因为其性能和灵活性比传统工具更好。
基于NI Single Board RIO的机器人开发

模拟与数字I/O以 及扩展I/O
• • • • • • 110 路3.3 V/TTL数字 I/O线路 多达32路±10 V、16位、 250 kS/s模 拟输入 多达4路±10 V、16位、 100 kS/s模 拟输出 多达32路24 V 工业数字输入线路 多达32路24 V 工业数字输出线路 最多扩展3块C系列IO模块
– FPGA FIFO 类似一个固定长度的队列
• DMA – 从RT上通过直接内存访问方式读写数据 • 工作原理
应用实例_伺服电机
1.硬件连接
sbRIO
应用实例_伺服电机
2.软件实现
(1)在 FPGA建立驱动程序 (2)选择相应的端口 (3)编写驱动程序 (4)编译
应用实例_光电轴角编码器
1.硬件连接 2.软件实现
• 什么是NI Single-Board RIO? 1.高容量嵌入式控制以及数据采集 2.高性能、高可靠性 3. 使用NI Labview FPGA和Labview实时技术
板载实时控制器
• 工业级266 MHz或400 MHz的Freescale MPC5200处理器,VxWorks
实时控制器
• 实时操作系统(VxWorks 和 Phar Lap) “准”确:
程序循环的时间抖动(Loop Jitter)在µ s量级, Windows操作 系统的时 间抖动为ms级。
“稳”定:
进程调度完全按照优先级进行,不会“死机”,Windows操 作系统会抢占CPU而挂起进程执行,容易形成进程互锁造 成“死机”。 ,
直观的图形开发方式,降低开发难度
需要用户自定义硬件的应用
• • • • •
NI最新推出Single-Board RIO平台

NI最新推出Single-Board RIO平台
佚名
【期刊名称】《微计算机信息》
【年(卷),期】2008(024)027
【摘要】2008年8月——美国国家仪器有限公司(National Instruments,简称NI)近日发布全新的NISin—gle—Board RIO设备,可为工程师及科学家在发布嵌入式控制及数据采集应用时提供低成本的集成硬件选项。
8款全新sbRIO-96xx设备在一块印刷电路板(PCB)上集成了嵌入式实时处理器、
【总页数】1页(P319)
【正文语种】中文
【中图分类】TP393.01
【相关文献】
1.NI最新推出Single-Board RIO平台 [J],
2.NI最新推出无线传感器网络平台 [J],
3.NI LabVIEW结合最新CompactRIO平台进军嵌入式开发 [J],
4.NI推出6款全新用于NI CompactRIO及NI CompactDAQ平台的I/O模块[J],
5.NI推出最新以太网数据采集平台 [J],
因版权原因,仅展示原文概要,查看原文内容请购买。
用于机器人的RIO嵌入式控制平台

用于机器人的RIO嵌入式控制平台概览自动或半自动机器人常常需要嵌入式控制系统,从而能够结合高度智能化的确定性控制,并且可以方便地连接到不同的传感器和执行器上。
NI提供了多种嵌入式硬件平台,以满足复杂系统的需求。
从尖端的机器人研究项目直至高级行业应用,NI平台被证实是高效的机器人解决方案。
可重复配置I/O(RIO)体系结构NI嵌入式硬件平台共享通用一个可重复配置I/O(RIO)体系结构。
这个体系结构整合了实时处理器、现场可编程门阵列(FPGA)和多样的I/O,概览自动或半自动机器人常常需要嵌入式控制系统,从而能够结合高度智能化的确定性控制,并且可以方便地连接到不同的传感器和执行器上。
NI提供了多种嵌入式硬件平台,以满足复杂系统的需求。
从尖端的机器人研究项目直至高级行业应用,NI平台被证实是高效的机器人解决方案。
可重复配置I/O(RIO)体系结构NI嵌入式硬件平台共享通用一个可重复配置I/O(RIO)体系结构。
这个体系结构整合了实时处理器、现场可编程门阵列 (FPGA)和多样的I/O,包括模拟、数字、运动和通信I/O。
使用这个标准的体系结构和NI LabVIEW图形化开发工具,您可以使用灵活的高性能硬件,快速对机器人系统进行设计和原型开发。
图1:NI RIO部署曲线:多种用于机器人的嵌入式硬件解决方案NI CompactRIO和NI单板RIOCompactRIO嵌入式系统具有实时嵌入式处理器、包含用户可编程FPGA的四槽或八槽可重复配置机箱以及可热插拔的工业I/O模块。
这个低成本的嵌入式体系结构提供了开放的低级硬件资源,可以用于机器人系统的快速开发。
另外, 它还包含提供保护的机械外壳。
图2:美国弗吉尼亚理工大学学生在CompactRIO的基础上开发半自动化地面车辆。
NI单板RIO是基于与CompactRIO相同体系结构的低成本板卡级嵌入式系统。
NI单板RIO具有板载的模拟I/O和数字I/O,当然您还可以通过其它I/O模块来进行扩展。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
传感器简介
• 舵机
• Rotation:100 degrees • Voltage:4.4 - 9.1 Volts • PWM Input:1ms - 2ms will give full reverse to full forward, 1.5ms is neutral • Black Wire:Ground • Orange Wire:Power • White Wire:PWM signal
– FPGA FIFO 类似一个固定长度的队列
• DMA – 从RT上通过直接内存访问方式读写数据 • 工作原理
• AI的IO Node可以输出整型或者定点型数据
FPGA上的定时与循环
• 定时函数 • 使用不同的定时函数执行循环
定时控制函数
配置定时函数
• 定时器单位
– Ticks – μsec – msec
超声波测距仪
• 模式选择:
Mode接地:串口模式
Mode悬空:I2C模式
指令发送:首先发送显示方式指令(in uS,cm or inch ),然后发送接收指令。 即:显示方式,接收,显示方式,接收……
注意:每次接收都要发送,不然会显示和上次一样的距离值。
对于两线输入的光电轴角编码器来说,还可以测试运动方向
传感器简介
• 超声波测距仪
单位:um,cm,inch
最小测量范围:Warm Day:17-18cm Cool Day: 15-16cm
最大测量范围:
/htm/srf02techSer.htm
基于NI Single Board RIO的 机器人开发
系统工程师 张春雷
内容提要
• NI Single Board RIO简介 • 传感器及执行机构介绍
• 基于sbRIO搭建机器人传感器系统
• sbRIO编程架构 • NI Vision介绍
NI Single Board RIO简介
NI Single-Board RIO产品
NI sbRIO-9642/9642XT
网络外围设备 10/100 Mbits/s 以太网端口, RS232串口 温度范围: -20---55°C 400 MHz处理器 ,128MB DRAM ,256MB非易失 存储器 可重配置FPGA ,自定义IO定 时与处理 19-30 V DC
光电轴角编码器
增量式编码由等间隔的刻线组成 ,对应每一个分辨率区间,可输 出一个增量脉冲,计数器相对于 基准位置(零位)对输出脉冲进 行累加计数,正转则加,反转则 减
光电轴角编码器
• 光电轴角编码器可以检测到每秒1700个脉冲,相当于每秒18.9转, 或者1133rpm,如果高于这个数值,测量会出现误差
硬件决策
高可靠性
硬 件 运 算 操 作 系 统 驱 动 API 应 用 软 件
UUT
25 ns* 响应
Outputs
* 80 和120 MHz 时钟提供了更快的响应
超过40 kHz的模拟控制
LabVIEW Real-Time • 单PID 40 kHz LabVIEW FPGA • 超过100 kHz 的PID
建立Project
FPGA I/O
• FPGA硬件可以同时包含模拟与数字I/O节点 • I/O节点的数量和类型取决于FPGA设备或者 SbRIO模块
FPGA I/O面板
I/O节点的配置
应用实例_超声波测距仪
1. 硬件连接 (1)电平匹配 (2)模式选择_串口模式 2. 软件实现 命令格式(地址+命令)
超声波测距仪效果图
程序设计结构
配置sbRIO
• 确定性地执行LabVIEW 实时应用程序
• 600多个LabVIEW 内建函数,建立用于实时 控制、分析、数据记录与通信的多线程嵌 入式系统,与C代码整合
可重新配置的FPGA
• 嵌入式FPGA • 无需学习VHDL • 开放的环境,可集成VHDL代码或IP核
严格定时 的 VI
LabVIEW FPGA VI
企业
数据存储
LabVIEW for Windows
LabVIEW Real-Time
LabVIEW FPGA
用 sbRIO搭建机器人传感器系统
传感器简介
• 光电轴角编码器 增量式编码由等间隔的刻线组成,对应每一个分辨率 区间,可输出一个增量脉冲,计数器相对于基准位置 (零位)对输出脉冲进行累加计数,正转则加,反转 则减 • Black:ground • Red:+5V • White:control signal Resolution:90 pulses per revolution
实时控制器
• 实时操作系统(VxWorks 和 Phar Lap) “准”确:
程序循环的时间抖动(Loop Jitter)在µ s量级, Windows操作 系统的时 间抖动为ms级。
“稳”定:
进程调度完全按照优先级进行,不会“死机”,Windows操 作系统会抢占CPU而挂起进程执行,容易形成进程互锁造 成“死机”。 ,
或者
I/O节点
• 数字I/O
– 输入 – 输出
• 模拟I/O
– 输入 – 输出
定点数据类型 Fixed point
• 在XP和控制器上的运算使用浮点数据 • 在FPGA上进行整数运算 • 小数点位置固定的数据类型,比如
– 总共20个bit – 4位表示整数 0~16 – 1位表示符号 – 15位表示小数点后面的数据,分辨率是 1/2^15=3.05e-5
应用实例_伺服电机
1.硬件连接
sbRIO
应用实例_伺服电机
2.软件实现
(1)在 FPGA建立驱动程序 (2)选择相应的端口 (3)编写驱动程序 (4)编译
应用实例_光电轴角编码器
1.硬件连接 2.软件实现
实时(Real-time)是什么?
• 实时 并不总意味着速度快 • 实时 意味着最高的可靠性 • 实时 系统必需有时间的约束,以防止事故的 发生 • 确定性是指在给定的时间完成任务的能力
实时操作系统的确定性与可靠性
传感器简介
• Motor 电机 • Voltage:4.4 - 9.1 Volts • PWM Input:1ms - 2ms will give full reverse to full forward, 1.5ms is neutral • Dead Band:1.47ms - 1.55m • Black Wire:Ground • Orange Wire:Power • White Wire:PWM signal
LabVIEW Real-Time下的LabVIEW FPGA体系结构
Windows PC LabVIEW Real-Time System 可重复配置 FPGA
FPGA 接口
User Windows Interface 主机VI
网络通信
普通优先级 VI
线程间通信
• 消费电子
– 数字音响: S/PDIF, I2S
• 自定义
传统系统
软件决策
Crash Possible
硬 件 操 作 系 统 驱 动 API 运 用 软 件 运 算
UUT
~25 ms 响应
输出
LabVIEW FPGA 系统
高确定性带来更快的控制速率
Labview FPGA
• FPGA—现场可编程门阵列
通过Labview编程实现硬件语言
• 充分利用FPGA的并行处理能力,直观的进行FPGA开发
• 什么是NI Single-Board RIO? 1.高容量嵌入式控制以及数据采集 2.高性能、高可靠性 3. 使用NI Labview FPGA和Labview实时技术
板载实时控制器
• 工业级266 MHz或400 MHz的Freescale MPC5200处理器,VxWorks
智能 DAQ
PWM 计数器 Clocks 自定义计数器 自定义模拟 I/O 自定义模拟触发 多扫描速率 自定义定时和同步 内置 IP 处理模块
数字通信协议
• 器件/IC 通信
– SPI, I2C, JTAG, PS/2, …
• 系统通信
– 航空航天: MIL-STD-1553, ARINC-429, … – 汽车: CAN, MOST, KWP, 1939, …
直观的图形开发方式,降低பைடு நூலகம்发难度
需要用户自定义硬件的应用
• • • • •
智能DAQ 数字通信协议 硬件决策(Decision Making in Hardware) 超过40kHz的控制速度 传感器级(Sensor level)的信号处理
110条3.3V数字 I/O线,32路单 端/16路差分的 模拟输入通道 ,4路模拟输出 通道以及32条 工业级24 V数 字I/O线。
外扩3个 连接器 ,使用 板卡级 NI C系 列I/O模 块的扩 展I/O
实时控制器
400 MHz处理器, 128MB DRAM, 256非易失存储器
• 内部计数器的大小
– 32 Bit – 16 Bit – 8 Bit
• 使用顺序结构,使得循环 定时器能在第一个while循 环中初始化 • 如果代码执行时间超过了 循环速率,则循环定时会 调整后续的循环
循环定时器(Loop Timer)
传感器简介