02_BSDEAPI用户手册
新颖水漏防护系统用户手册说明书
| MSDS | DoP |PRODUCT CODE: HB-2SIZE & PACKAGINGNewton 403 HydroBond is supplied in rolls of 1.0m x 20.0m (20m2), packaged 20 rolls to a crate (400m2). Product weight is 1.235kg/m2.METHODS OF APPLICATIONNewton 403 HydroBond is placed to formwork ready for the placement of concrete. For concrete rafts and slabs, Newton 403 HydroBond is fitted above a sound and uniform support such as a concrete blinding or compacted hardcore.When installed to walls, Newton 403 HydroBond is fitted to sound and uniform permanent formwork such as existing walls or faced-off piles. Please see page 4 for a list of suitable support substrates. CONSTRUCTIONThe construction should conform with current Building Regulations, British Standards and relevant Codes of Practice. New concrete should be designed by a Structural Engineer to EN 1992 (Formally BS 8110 & BS 8007) to be structurally capable for the intended use as an earth retained structure, resisting loading from earth as well as water pressure as recommended within BS 8102:2009.NEWTON 108 HYDROBOND-LMWhere shuttering is to be removed to expose the outer face of the concrete walls, Newton 108 HydroBond-LM should be used to complete the 108 HydroBond System. 108 HydroBond-LM is a liquid rubber membrane that is spray applied to provide a continuous and seamless membrane to concrete walls, lapping over 403 HydroBond for a complete system. Newton 108 HydroBond-LM is very elastic, requires no primer and can be installed in cool and damp conditions ensuring that your project is finished on time and within budget. Up to 1000mday can be installed making 108 HydroBond-LM a very quick and cost efficient alternative to adhesive sheet membranes. Newton 109-LM is a derivative of 108 HydroBond-LM that can be applied by brush or roller where access for the spray machine is not possible, or for detailing.For further information on Newton 108 HydroBond-LM and our comprehensive range of waterproofingand damp proofing products and systems please contact our sales office on 01732 360095 or our website 12 Sweep the support surface clean, Substrate should be smooth and firm. Concrete surfaces should be freeof voids and sharp projections. Surface irregularities should be removed before installation. Voids mustbe filled with mortar, and holes filled with proprietarynon-shrink mortar/grout.34Measure the perimeter of the formwork to determinethe length of the membrane required. Make provisionfor 70mm overlaps to each end joint of the 20m long membrane rolls. When cutting the membrane use a retractable craft knife or sharp shears whilst wearing safety gloves.Fold along the guide created in the previous stage.Sharpen the crease with a hard roller.At internal corners, make a crease at the change in direction. Once the crease is formed, lift up the flap marked A and invert the upstand marked B so that the upstand of the flap A is in front of the main sheet upstand as shown in Fig. 7.Step one: Form a crease as shown. Stage 2: Fold back.Holding the membrane at point A of the grey flap and fold back so that your hand is at point C. The upstand B of figure 7 should now be against the formwork at point B. At this stage only the white fleece should be facing upwards.Seal the 45 degree joint with the double sided HydroBond tape. Use a hard roller to ensure a firm bond of the tape to the between the two surfaces of 403 HydroBond.5678910AABBCB Fig. 9 shows the completed corner. At this stage only the white fleece should be seen. The fold is to theright hand side of the joint and the membrane is triple thickness.For external corners, cut a square of 403 HydroBond and from a corner of that square, cut out a small square of about 75mm x 75mm. Fit the square to the corner and when in place, tape the square under the 403 HydroBond already in place.Seal the joints with HydroBond Tape. Over tape the corner with two patches of Newton Mesh Tape.Once all the perimeter of the substrate has been completed, ensure that all edges of the membrane above the floor support have either an adhesive edge or have been prepared with the doublesided HydroBond Tape. Unroll strips of membrane, overlapping the 403 HydroBond that is already in place by 70mm.To complete the overlapped joints, remove 75mmof the clear film to the underside (grey side) of the 403 HydroBond. Peel off the protective release liner from the adhesive edge of the HydroBond Tape and press the laps together. Use a hard roller to ensure the laps are fully and constantly adhered.All joints should be adhered with either the adhesive edge or the double sided HydroBond Tape. To reinforce the joints, over tape with Newton Mesh Tape using a hard roller and a Hot Air Gun to ensure the butyl underside of the Mesh Tape is fully bonded into the upper fleece of the 403 HydroBond.1113141516Nail the 403 HydroBond to the formwork leaving the nails exposed to give a key for the concrete and to ensure that the formwork can be easily removed. The nails are cut flush with the membrane after the formwork is removed. A dab of 106 FlexProof or 109-LM can be used over the small hole, although the membrane will self-heal.12UNDULATING WALL PERMANENT FORMWORKIf not faced-off, on contiguous piling, ensure that soil columns between piles are cut back to no less than one third of the pile diameter, to create a fixing cleavage, and reduce the likelihood of soil dislodging behind the membrane.Use shot fired nails to install the membrane so that it is tightly fitted into the undulations of the formwork. Ensure that the 403 HydroBond is fully supported by the formwork. Pay particular attention to the joints which should be fully adhered by either the adhesive edge or the double sided HydroBond Tape.INSTALLATION ABOVE FLOOR SUPPORTTo faced-off formwork, install as instructed within page 4 to page 6. Use HydroBond Tape or the adhesive edge to make the final seal between the upturned 403 HydroBond to that already installed to the walls.To undulating wall formwork, cut the 403 HydroBond into 500mm wide strips to the measure of the perimeter, plus 70mm end overlaps, plus a small error margin. Fold to make a 250mm upstand. To force the upstand to the shape of the piles you will need to cut and splay the fold above the floor support to allow it to lay flat. Once the The adjacent drawings show examples of facing off secant and sheet piling ready for the application of Newton 403 HydroBond.For further information on these drawings or for the facing off of other irregular substrate, please contact our technical department on 01732 360095.Pipe Protrusion Movement jointInterface with Pile Interface with Small PileNewton 104Newton 403 HydroBond HydroBond TapeNewton 106 FlexProof-X1 Newton 106 FlexProof-NV Newton 307 PipeSealNewton Waterproofing Systems Is A Trading Name OfJohn Newton & Company Ltd.Newton House, 17-19 Sovereign WayTonbridge, Kent TN9 1RH T: +44 (0)1732 360095E: ***************************.uk W:MEMBRANE REPAIRInspect the membrane before installation of reinforcement steel, formwork and final placement of concrete. The membrane can be easily cleaned by brushing or jet washing if required.Repair damage by ensuring the area is clean and dry and free from dust. Repair small punctures (12mm or less) and cuts by applying a patch of Newton 403 HydroBond (clear film removed from polymer side) centred over the damaged area and secure with HydroBond Tape, pressing firmly using a hard roller to ensure a good bond. Over seal the outer edge of the patch with Newton Mesh Tape. Use a hard roller and a heat gun to fully adhere the Mesh Tape into the HydroBond fleece.Repair holes and large punctures by applying a patch of Newton 403 HydroBond membrane, which extends 150mm beyond the damaged area. Seal all edges of the patch with HydroBond Tape (clear film removed from 75mm from the edge of the patch on the polymer side), pressing firmly using a hard roller to ensure a good bond. Over seal the outer edge of the patch with Newton Mesh Tape. Use a hard roller and a heat gun to fully adhere the Mesh Tape into the membrane fleece.Where exposed adhesive edges have lost adhesion or laps have not been fully sealed, ensure the area is clean and dry and reseal with HydroBond Tape, resealing the lap and rolling firmly with a hard roller. Over tape with Newton Mesh Tape.Make a 403 HydroBond patch of correct size and seal Over seal edges of the lap with Newton Mesh Tape with HydroBond tapeLIMITATIONSHorizontal installation surfaces should be free of excessive standing water, particularly where concreteunder blinding is not utilised. Newton 403 HydroBond can be installed in most inclement weather conditions,providing the quality/accuracy of the installation is not affected e.g. 403 HydroBond floating, hydrophilic waterbars submersed, etc. 403 HydroBond is not designed for unconfined above-ground waterproofing applications.403 HydroBond is engineered for use under reinforced structural concrete rafts or slabs of 150mm thick orgreater. Do not install 403 HydroBond in horizontal split-slab, plaza deck and roof applications that will receive a poured concrete wear surface or other solid topping.。
北京亿兆未来ESDH-MSAP系列说明书
2.1 主要特点.................................................................................................................................7 2.2 设备标准.................................................................................................................................7 2.3 产品列表.................................................................................................................................8
四、 设备安装及说明...................................................................................................................13
4.1 机械安装...............................................................................................................................13 4.1.1 设备拆封........................................................................................................................13 4.1.2 设备安装........................................................................................................................13
M102用户手册 英文版
ABBM101-M/M102-M User’s GuideM101-M/M102-M User’s GuideTable of Contents1INTRODUCTION (3)1.1Objective (3)1.2Related Documentation (3)2PRODUCT OVERVIEW (3)2.1Introduction (3)2.2M101-M/M102-M’s Structure (4)3MOUNTING (4)3.1Mounting of M101-M/M102-M (4)4M101-M/M102-M INTERFACES (4)4.1Terminal Designations (5)4.2Typical diagram (9)5FUNCTIONALITY (10)5.1Starter Types (10)5.2Protection Function (21)5.3M101-M/M102-M Function and Supervision (34)6M101-M/M102-M COMMUNICATION INTERFACE (40)6.1Overview (40)6.2RS485 Interface Cable (40)6.3Function Description (40)7PARAMETERIZATION (40)7.1Overview (40)7.2Parameterization via MD2/MD3 (40)7.3Parameterization via MODBUS (40)M101-M/M102-M User’s Guide7.4M101-M/M102-M Parameters (40)8ACCESSORIES (40)8.1MD2/MD3 Operator Panel (40)8.2Parameterization Software: MCUsetup (44)9APPENDIX A TECHNICAL DATA (46)10APPENDIX B TYPE DESIGNATION (48)M101-M/M102-M User’s Guide1.1 ObjectiveThe objective of this users manual is to provide the technical information of M101-M/M102-M.This manual should be studied carefully before installing, parameterizing or operating the motor control unit. It is expected that the user has a basic knowledge of physical and electrical fundamentals, electrical wiring practices and electrical components.This document should be used along with M101-M/M102-M Parameter Description, which provides detailed information about parameters and their applications.1.2 RelatedDocumentation1TNC 911105 M0202 Parameter Description M101-M/M102-M1TNC 911505 M0203 Modbus Protocol Implementation for M101-M/M102-M2 ProductOverview2.1 IntroductionM101-M/M102-M is a motor protection and control device with a fieldbus interface.M101-M/M102-M is a microprocessor-based device. All motor protection and control functions are implemented with the microprocessor, as well as interlocking functions, the calculation of operating, diagnosis and statistical data and communication.Standard features simplify maintenance and plant expansion. One M101-M/M102-M is required for every starter unit in the MCC.Motor protection is included for the most common causes of failure to prevent costly shutdowns and rewinds. These include overload, stalled rotor, ground fault and phase failure etc.M101-M/M102-M with its redundant RS485 interface makes it possible to network upward with automation level in a high speed and reliable way. Any M101-M/M102-M may be interrogated on demand to determine both actual and operating parameters. Fast response time for alarm or trip status makes real time control of a complete process possible. Statistical recording of running hours andnumber of operations assists with predictive maintenance scheduling.fieldbus capacity: 32 nodescommunication connectionredundancy communication connectionPicture 1Network connection of M101-M/M102-MFor AC motor and the operated installation this means:• Reliable protection• Maximum utilization• Continuous supervision• FlexibilityM101-M/M102-M User’s Guide2.2 M101-M/M102-M’s StructureM101-M/M102-M consists of two parts: Main unitCurrent converter unitAs accessory of M101-M/M102-M: Operator panel MD2/MD3 Main unitThe Main unit is a unit contains the electronics of the motor control unit.Main unit is fixed to a mounting rail . Current converter unitThe Current converter unit contains the current transformers.It is fixed to the Main unit. Operator panel MD2/MD3The Operator panel is the user interface mounted onthe front door or drawer. With control buttons, LED,LCD module (MD2 only), MD2/MD3 provides thefunctions as motor control, supervision and parameterizing. M101-M/M102-M enclosure materialThe enclosure of the M101-M/M102-M is made of polycarbonate. Flammability rating of the material is UL 94 V-0 and material is halogen free. Colour of the enclosure is RAL 7012. Note: The details of MD2/MD3 please see the chapter 8 accessories.3 Mounting3.1Mounting of M101-M/M102-M• Basic dimension of M101-M/M102-M: WXHXD=110mmX140mmX75mm •Typical Installation ofM101-M/M102-M:DIN rail or installation to horizontal plane • Basic dimension of MD2: WXHXD=88mmX72mmX40mm • Mounting dimension of MD2: WXH=85mmX69mm• Basic dimension of MD3: WXHXD=88mmX50mmX28mm •Mounting dimension of MD3:WXH=84mmX46mmNote: The installation details of M101-M/M102-M and MD2/MD3please see the related documentation installation manual.4 M101-M/M102-M interfacesM101-M/M102-M has 4 I/O terminal blocks.I/O terminals located at the top of the main unit as shown in the following. The information of each port is described later. Picture 4 Terminals viewed from topPicture 2 M101-M/M102-MM101-M/M102-M User’s Guide4.1 TerminalDesignations Table 1 Device terminalsTerminal Block Terminal NumberDesignation…Plug/ContactsRemarkX1:1…X1:13 I/O block, switch inputX1X1:14…X1:16 PTC inputCross section 1.5mm2X2 X2:1…6 Interface for MD2/3 Cable with RJ11 is provided as standardX3:1…5 Fieldbus for external communicationX3:6,7 RCT inputX3X3:8…13 Voltage InputCross section 2.5mm2X4:1…9 Relay outputX4:10,11 24VDC SupplyX4X4:12 GroundCross section 2.5mm2L1-T1;L2-T2;L3-T3Let-through Current Measurement Φ10mm hole4.1.1 PowersupplyThe standard power supply is 24V DC preferably from a UPS.M101-M/M102-M User’s GuideTable 2 Power supply input terminalsTerminal No.Name Description4.1.1.1 X4:11 24VDC Power supply 24VDC + X4:10GNDPower supply 24VDC -4.1.2 Digital inputM101-M has 6 and M102-M has 13 digital inputs of the type 5mA/24VDC. Digital inputs are cyclically read. The contact is detected as closed if the input current is over 2.5mA and open if current is under 0.8mA. There are three programmable inputs included, which can be assigned to a defined function. Table 3 Digital input terminals and pins of M101-M. Terminal No. Name Description4.1.2.1 X1:1 IN_COM Digital input common terminal (DC24V-) X1:2 NC SpareX1:3 LOC/R Locate/remote control switch input X1:4 NC SpareX1:5 F_Ca Contactor control A feedback X1:6 NC SpareX1:7 F_Cb Contactor control B feedback X1:8 NC SpareX1:9 PROG_IN0 Programmable input 0 X1:10 NC SpareX1:11 PROG_IN1 Programmable input 1 X1:12 NCSpareX1:13 PROG_IN2Programmable input 2Table 4 Digital input terminals and pins of M102-M. Terminal No. Name Description4.1.2.2 X1:1 LIMIT1 Limit position switch 1 input X1:2 LIMIT2 Limit position switch 2 input X1:3 START1 Motor start 1 switch input X1:4 START2 Motor start 2 switch input X1:5 STOP Motor stop switch inputX1:6 LOC/R Locate/remote control switch input X1:7 F_Ca Contactor control A feedback X1:8 F_Cb Contactor control B feedback X1:9 F_Cc Contactor control C feedback X1:10 PROG_IN0 Programmable input 0 X1:11PROG_IN1Programmable input 1M101-M/M102-M User’s GuideX1:12 PROG_IN2 Programmable input 2X1:13 MCBAuxiliary contact from main switch4.1.3PTC input (only for M102-M)M102-M can utilize PTC sensor to follow the temperature of motor winding. The measuring principle is to use two identical current generators over a 3-wire Pt transmitter. PTC connector is located on the top of M102-M unit, terminal X1.Note: The M101-M hasn’t PTC input. Table 5 PTC input terminals. Terminal No. Name DescriptionX1:14 PTCA PTC measurement input A X1:15 PTCB PTC measurement input B X1:16PTCGPTC measurement input G4.1.4 Fieldbus interfaceThere are two RS485 communication interface integrated in M101-M/M102-M. The two communication ports are for redundancy design.Required bus cabling is shielded twisted pair (STP). Table 6 Fieldbus interface terminal . Terminal No. Name Description X3:1 2A Serial RS485 A X3:2 2B Serial RS485 B X3:3 SHIELD 485 shield X3:4 1A Serial RS485 A X3:5 1BSerial RS485 B4.1.5Residual current transformerM101-M/M102-M supports earth fault measurement through Residual Current Transformer ( RCT ). Table 7 Residual current transformer terminals Terminal No. Name DescriptionX3:6 Ioa Residual current transformer input A X3:7 IobResidual current transformer input BNote: The details of RCT please see the documentation of M101/M102 Ordering Guide.4.1.6Voltage measurement (only for M102-M)M102-M continuously measures three phase voltages. The voltage data is used for protection functions and power calculation.Note: The M102-M has voltage input only. Table 8 Voltage input terminals of M102-M only. Terminal No. Name DescriptionX3:9 Vc Phase C voltage input X3:11 Vb Phase B voltage input X3:13 Va Phase A voltage input X3:8NNeutral line inputM101-M/M102-M User’s Guide4.1.7 Current measurement terminalM101-M/M102-M measures continuously three motor phase currents. The phase current data will be used by the protection functions and is reported to the fieldbus. Phase currents are reported as relative value. Relative value is proportional to the motor nominal current In.Current wires are lead through current sensors from either side of the terminal.Direction can be either L->T or T->L considering that all currents must have the same direction.Motor nominal currents above 63A are not measured directly, but instead intermediate current transformer’s secondary side is connected through M101-M/M102-M current measurement terminal. Note: when one phase system is selected, current is measured only from phase A.4.1.8 Contactor control outputM101-M/M102-M supports several motor starter types. The control of the contactor is performed with internal relays (Output CCA, CCB, CCC) by the microprocessor.Internal relays CCA and CCB are hardwire-interlocked to prevent both contactors being closed at the same time.Note: M101-M has the relays CCA and CCB only.Table 9 Contactor control terminalsTerminal No. Name Description M101-MM102-MX4:6… CCLI Contactor control voltageinput√√X4:7 CCA Contactor control A √√X4:8 CCB Contactor control B √√X4:9 CCC Contactor control C √4.1.9 ProgrammableoutputM101-M/M102-M has two auxiliary programmable output relays. These two outputs can be assigned any of the functions defined in Clause 5.3.8.2.Table 10 Programmable output terminalsTerminal No. Name Description M101-MM102-M X4:1 GR1_AX4:2 GR1_B X4:3 GR1_C Programmable relay output 1 (NO+NC) √√X4:4 GR2_AX4:5 GR2_BProgrammable relay output 2 (NO) √4.1.10 Interface for MD2/MD3M101-M/M102-M has a RJ11 interface for operator panel MD2/MD3.Table 11 Operator panel interface terminalsTerminal No. Name DescriptionX2:1 RS485 BX2:2 RS485 ACommunication ports with operator panelX2:3 SHIELDX2:4 SHIELDShieldX2:5 Vcc Power supply for operator panelM101-M/M102-M User’s Guide4.1.11 GroundterminalTable 12 Ground terminalTerminal No. Name DescriptionX4:12 GROUND Ground safety and surgeThis is an additional ground terminal provided for dissipating transient signals and surges. This must be connected by a thick wire or braid to the system ground for reliable operation.diagram4.2 TypicalA typical wiring diagram is show belowPicture 5 typical wiring diagram for M101-MNote: I) The status of the relays is open when M101-M is power off, such as CCA, CCB, and programmable relay output1.ii) The GR1_A and GR1_C is the auxiliary contact of the programmable relay output1.iii) When M101-M is power on the status of the relays CCA,CCB depends on whether itreceives command or not.iv) When M101-M is power on the status of the relay programmable relay output1M101-M/M102-M User’s Guidedepends on the definition.Note: I) The status of the relays is open when M102-M is power off, such as CCA, CCB, and programmable relay output1/2.ii) The GR1_A, GR1_C, and GR2_A is the auxiliary contact of the programmable relaysoutput.iii) When M102-M is power on the status of the relays CCA, CCB and CCC depends onwhether it receives command or not.iv) When M102-M is power on the status of the relays programmable relay outputdepends on the definition.5 FunctionalityTypes5.1 StarterThe module offers several kinds of motor starting control modes via the control of relay output. It supervises the operating state of the contactor according to the feedback of auxiliary contact.The following starting control modes are offered:M101-M/M102-M User’s GuideTable 13 Starter types supported by M101-M/M102-M Starter type M101-MM102-MNR-DOL √ √ REV-DOL √ √ NR-DOL/RCU √ √ REV-DOL/RCU √ √ Actuator √ NR-S/D √ NR-2N√ Autotransformer √ NR_softstater √ REV_softstater√• NR_DOL: Non Reversing Direct Online • REV_DOL: Reversing Direct Online• NR_DOL/RCU: Non Reversing Direct Online with RCU • REV_DOL/RCU: Reversing Direct Online with RCU • Actuator: Actuator with limit switch input • NR_S/D: Non Reversing Star-Delta• NR_2N: Two speed driver for Non Reversing starter • Autotransformer: Autotransformer starter • NR_Softstarter: Non Reversing softstarter control •REV_Softstarter: Reversing softstarter controlStarter type is selected with a dedicated parameter to match the wiring for contactor and motor control circuits.5.1.1 NR-DOL STARTERNR_DOL starter is the basic starter type for driving motor to one direction. When start command has been received from field or local I/O, the contactor control output will be energized and remains this condition until stop command has been received or any protection function activated.Table 14 NR-DOL starter contactor control interface(for M101-M/M102-M) Name Pin DescriptionCCLI X4:6 Contactor control voltage input CCA X4:7 Contactor control ALOC/R X1:6 Local/remote control switch input F_Ca X1:7Contactor control A feedbackM101-M/M102-M User’s GuidePicture 7 Control circuit for NR-DOL starter (for M101-M/M102-M )5.1.2 NR-DOL STARTER (RCU )RCU (Remote Control Unit) is a starter type where contactors are directly controlled by a special RCU-switch located near the motor. This allows controlling the motor even if the M101-M/M102-M is not on duty.Table 15 NR-DOL starter contactor control interface (for M101-M/M102-M) Name Pin DescriptionRemark CCLI X4:6 Contactor control voltage input CCA X4:7 Contactor control AGR1_C X4:3 Programmable relay output Only for M101-M CCC X4:9 Contactor control CF_Ca X1:7 Contactor control A feedbackLOC/RX1:6Local/remote control switch inputPicture 8 Control circuit for NR-DOL/RCU starter(for M101-M)M101-M/M102-M User’s GuidePicture 9 Control circuit for NR-DOL/RCU starter(for M102-M)5.1.3 REV-DOL STARTERREV-DOL uses contactor control output A for controlling the contactor which drives motor to direction CW and correspondingly contactor control output B is used for direction CCW. When starting motor to either direction contactor will be energized and is stopped (not energized) by command (fieldbus or local I/O) or active protection function.Table 16 REV-DOL starter contactor control interface (for M101-M/M102-M) Name PinDescriptionCCLI X4:6 Contactor control voltage input CCA X4:7 Contactor control A CCB X4:8 Contactor control BF_Ca X1:7 Contactor control A feedback F_Cb X1:8 Contactor control B feedback LOC/R X1:6Local/remote control switch inputPicture 10 Control circuit for REV-DOL starter (for M101-M/M102-M)M101-M/M102-M User’s GuideSTARTERThe functionality of this starter type is according to NR-DOL/RCU starter with support for reversing use of motor.Table 17 REV-DOL starter contactor control interface (for M101-M/M102-M)Name Pin Description RemarkCCLI X4:6 Contactor control voltage inputCCA X4:7 Contactor control ACCB X4:8 Contactor control BGR1_C X4:3 Programmable relay output Only for M101-M CCC X4:9 Contactor control C Only for M102-M F_Ca X1:7 Contactor control A feedbackF_Cb X1:8 Contactor control B feedbackLOC/R X1:6 Local/remote control switch inputPicture 11 Control circuit for REV-DOL/RCU starter (for M101-M)M101-M/M102-M User’s GuidePicture 12 Control circuit for REV-DOL/RCU starter (for M102-M)5.1.5Actuator STARTER (for M102-M only)This starter type is for controlling valves and actuators by using limit switches. Table 18 Actuator starter contactor control interface NamePin DescriptionCCLI X4:6 Contactor control voltage input CCA X4:7 Contactor control A CCB X4:8 Contactor control B LIMIT1 X1:1 Limit position switch 1 input LIMIT2X1:2Limit position switch 2 inputM101-M/M102-M User’s GuidePROG_IN0 X1:10 Programmalbe input 0 (configured as Torque switch input) F_Ca X1:7 Contactor control A feedback F_Cb X1:8 Contactor control B feedback LOC/R X1:6Local/remote control switch inputPicture 13 Control circuit for Actuator starterLimit switch causes the motor to be stopped when activated. Event message is sent to the fieldbus according to activated limit switch and additionally start command is allowed only to reverse direction. Torque switch is selectable by parameterization and can be connected to programmable input 0. 5.1.6NR-S/D STARTER (for M102-M only)Motor start current is reduced in star connection to 1/3rdof the current in delta connection, with lower torque during the same time.Start to delta starting sequence is based on the presented control logic picture. The changeover condition is time.The following guideline applied for selecting parameter values Changeover time < Motor startup time Table 19 NR_S/D starter contactor control interface NamePin DescriptionCCLI X4:6 Contactor control voltage input CCA X4:7 Contactor control A CCB X4:8 Contactor control B CCC X4:9 Contactor control CF_Ca X1:7 Contactor control A feedback F_Cb X1:8 Contactor control B feedback F_Cc X1:9 Contactor control C feedback LOC/R X1:6Local/remote control switch inputM101-M/M102-M User’s GuidePicture 14 Control circuit for NR-S/D starter5.1.7NR-2N STARTER (for M102-M only)NR-2N/Dahlander uses three contactors control motor rotation speed, The motor contains a three phase winding. Rotation speed can be changed “on the fly” without stop command in between.Current measurement for NR-2N utilizes two external current transformers measuring current from motor main supply. External current transformers can be selected separately for both speeds. Table 20 NR-2N starter contactor control interface Name PinDescriptionCCLI X4:6 Contactor control voltage input CCA X4:7 Contactor control A CCB X4:8 Contactor control B CCC X4:9 Contactor control CF_Ca X1:7 Contactor control A feedback F_Cb X1:8 Contactor control B feedback F_Cc X1:9 Contactor control C feedback LOC/R X1:6Local/remote control switch inputPicture 15 Control circuit for NR_2N starter, DanlanderM101-M/M102-M User’s GuidePicture 16 Control circuit for NR_2N starter, separate windings5.1.8AUTOTRANSFORMER STARTER (for M102-M only)This starter type is used to control autotransformer unit in order to minimize the voltage drop during motor startup. Autotransformer starter with three contactors supports motor starting with reduced voltage thus providing reduced motor startup current. The starting torque will be reduced accordingly. The following guideline applied for selecting parameter values Changeover time < Motor startup timeTable 21 Autotransformer starter contactor control interface NamePin DescriptionCCLI X4:6 Contactor control voltage input CCA X4:7 Contactor control A CCB X4:8 Contactor control B CCC X4:9 Contactor control CF_CaX1:7Contactor control A feedbackM101-M/M102-M User’s GuideF_Cb X1:8 Contactor control B feedback F_Cc X1:9 Contactor control C feedback LOC/R X1:6Local/remote control switch inputPicture 17 Control circuit for Autotransformer starter5.1.9NR-SOFTSTARTER (for M102-M only)Softstarter applications are for controlling motor accessory softstarter device. M102-M gives start and stop commands to the softstarter unit. The softstarter is set for adjusting motor voltage with it’s own parameters. More information about softstarter can be found from softstarter’s manual.This starter type supports all protection functions during normal “Running” situation. For motor start and stop period some of the protection functions are disabled by these parameters. Table 22NR_Softstarter starter contactor control interface Name Pin DescriptionCCLI X4:6 Contactor control voltage input CCA X4:7 Contactor control AF_Ca X1:7 Contactor control A feedback LOC/R X1:6Local/remote control switch inputPicture 18 Control circuit for NR-softstarterM101-M/M102-M User’s Guide5.1.10REV-softstarter (for M102-M only)Functionality of this starter type is according to NR-softstarter starter with support for reversing use of motor.Table 23 REV-softstarter starter contactor control interface Name PinDescriptionCCLI X4:6 Contactor control voltage input CCA X4:7 Contactor control A CCB X4:8 Contactor control B CCC X4:9 Contactor control CF_Ca X1:7 Contactor control A feedback F_Cb X1:8 Contactor control B feedback LOC/R X1:6Local/remote control switch inputPicture 19 Control circuit for REV-SoftstarterM101-M/M102-M User’s Guide5.2 ProtectionFunctionThe module provides full protection for motor by supervising three phase voltages, three phase currents, earth fault current, PTC sensor, the state of contactors and the state of main switch.Functionality of protection functions is based on the parameters given by user. The operation of separate functions is independent thus protection functions can be active at the same time but the one which indicates the situation first will give a trip for motor.According to the application, all kinds of protection can be enabled, disabled by the upper level system or MCU setup tool, also the protection characteristics can be adjusted. Protection module offers the following protection and supervisory function.Table 24Protection supported by M101-M/M102-MProtection type M101-M M102-MThermal overload protection √√Stall protection √√Phase failure protection √√Unbalance protection √√Underload protection √√Noload protection √√Earth fault protection √√PTC protection √Undervoltage protection √Start limitation protection √√Note: M101-M can’t support EExe thermal model of thermal overload protection (TOL), support Standard thermal model only.5.2.1 Thermal overload protectionThermal overload protection (TOL) protects the motor against overheating. The motor thermal condition is simulated by a calculation. The result of the calculation is stored in a thermal register and can be reported via operator panel or fieldbus interface.Calculation is accomplished in a different motor operation conditions, principle presented below, thermal increase and decrease are simulated by TOL protection function for running and stopped motor. Picture 20 Principle picture of motor thermal simulationM101-M/M102-M User’s GuideM101-M/M102-M simulates thermal conditions in the motor for all operating modes ( Running or Stopped) . This permits maximum utilization of an installation and assures safe protection of the motor. Thermal overload protection simulation accounts for the temperature rise of both the stator winding and the iron mass of the motor, it gives thorough consideration on the effect of motor overheating due to three phase unbalance during the simulation calculation of motor thermal overload.There are two thermal models supported by M102-M: Standard or EEx e, but M101-M only supports Standard thermal model. The standard model makes use of parameters Trip class, t6 in thermal overload calculation. The protection of explosion proof three-phase motors with type of protection ‘increased safety’ EEx e is done with two special parameters, the Ia/In ratio ( stall/nominal current ratio ) and Te time.The following diagram offers the characteristic curve of overload protection, in which the character is adjusted by changing t6( trip time for current I Lmax =6×In from the cold state). Picture 21 Trip curve from cold conditionThe Maximum thermal capacity level is 100%. Maximum level is reached when motor as been running with a current 6xIn at the time t6 starting from the cold state in ambient temp. 40°C.M101-M/M102-M User’s GuideTrip class T610A 3-710 7-1220 10-2530 15-38In some applications it is beneficial to be able to bypass the TOL protection momentarily because of the process reasons. The lifetime of the motor will be shortened but it will be more costly to stop the process. TOL-bypass is a special command given through the fieldbus.There is a dedicated parameter to enable the execution of this command. TOL-bypass function is available only for TOL standard model, thus it cannot be enabled if TOL EEx e model is in use.When thermal level is above parameterised alarm level there is a possibility to send a bypass command to M101-M/M102-M. When bypass function is activated, the thermal image is allowed to rise to 200% level before a trip will occur.If motor is in overload condition, i.e. ILmax > 1,14 x TFLC (Thermal full load current multiplier reduced by motor ambient temperature), the Overload alarm is active to indicate overload, but time to trip is not updated if the thermal capacity level (θ) is not going to rise above 200% (I TOL < √2). If motor is stopped before trip and the thermal capacity decreases below TOL alarm level the bypass functionality is disabled. Bypass command is ignored when running under alarm level.Table 26 TOL protection parametersThermal modelSetting range 0=Standard model 1=EEX eDefault value 0Step value 1T6YSetting range 3-40sDefault value 6sStep value 1Ia/In ZSetting range 1.2-8.0Default value 5.0Step value 0.1Te ZSetting range 1-250sDefault value 5sStep value 1sCool coe.Setting range 1-10Default value 4Step value 1TOL Alarm LevelM101-M/M102-M User’s GuideSetting range 6 0-100% Default value 90% Step value 1%TOL Trip Level Setting range 70-100% Default value 100% Step value 1%TOL Reset Level Setting range 10-60% Default value 50% Step value 1%Trip Reset Mode Setting range 1=.Auto 2=Local 3=Remote 4=Remote&Local Default value 4 Step value 1TOL bypass Setting range 0=Disable 1=Enable Default value DisableY When Standard thermal model is selected Z When thermal models is selectedNote: M101-M can’t support the EExe thermal models. 5.2.2 Stall ProtectionStall protection is used to protect the driven mechanical system from jams and excessive overload. Stall protection function uses Imax as the criterion. There are other parameters to be determined as followed. Table 27 Stall protection parameters Function Enable/Disable Setting range 0=Disable 1=Enable 2=Trip only 3=Alarm only Default value 1 Step value 1Trip Level Setting range 120-800% Default value 400% Step value 1%Trip Delay Setting range 0.0-25.0s Default value 0.5s Step value 0.1s Trip Reset Mode Setting range1=Auto 2=Local 3=Remote 4=Remote&LocalM101-M/M102-M User’s GuideDefault value 4Step value 1Picture 22 Stall protectionI NILmaxStartup currentTrip LevelStall function activates after motor nominal startup time elapsed.The highest measured phase current (I Lmax) is compared against the Trip level. When I Lmax remains over the trip level at a time longer than Trip delay, a “Stall trip” alarm is issued and the contactor tripped.5.2.3 Phase failure protectionM101-M/M102-M protects the motor against phase current loss condition. Phase failure protection function uses I Lmin/I Lmax (the ratio of lowest I Lmin and highest measured phase value I Lmax ) as the criterion. Function is suppressed by parameters Motor startup time, Number of phases and Softstart ramp time. Table 28 Phase failure parametersFunction Enable/DisableSetting range 0=Disabled 1=EnabledDefault value DisabledStep value 1Alarm LevelSetting range 10-90%Default value 80%Step value 1%Trip LevelSetting range 5-90%Default value 70%Step value 1%Trip DelaySetting range 0-60sDefault value 10sStep value 1sTrip Reset ModeSetting range 2=Local 3=Remote 4=Remote&Local。
PowerBox-系统用户手册说明书
Dear customer,We are delighted that you have decided to purchase this PowerBox accessory from our range.We hope you have many hours of pleasure and great success with your PowerBUS devices.The PowerBUS is the basis of a completely new method of wiring servos. The PowerBUS consists of a three-core cable which supplies current and signal to the servos connected to it. At first glance this is nothing unusual, but the big difference lies in the signal wire. When conventional servo signals are transferred, the signal wire always carries the information for one individual servo only - this is a PWM (Pulse Width Modulated) signal. In a servo bus system the signal wire carries posi-tional information for multiple servos in digital form. The information for individual servos includes address data, and since each servo is assigned its own individual address, it can read out …its“ information from the data stream, and convert it into a movement of the control surface. PowerBus to PWM adapters can also be emplo-yed to enable the use of servos without their own decoder; in this case the adapter carries out the decoding.The advantage of this arrangement is obvious: all you need is one three-core lead in order to supply the essential information to several servos. The wiring is much simpler, and there is also a significant weight saving.However, until now there has always been one disadvantage to bus systems: a short-circuit in one servo causes the bus lead to be blocked, and all the servos connected to it stop working. Here at PowerBox-Systems we have completely eli-minated this former drawback:The servo distributors which we have developed are protected against short-cir-cuits in the power supply lines and the signal line! This means that, if one output isshorted out at a servo distributor, within a few micro-seconds that output is swit-ched off, and the bus lead remains active.This supplementary feature is very important to flight safety, since a servo bus without it can never be suitable for use in valuable model aircraft!The following section introduces and describes the individual components of the PowerBUS:1. OVERVIEW OF POWERBUS COMPONENTSThree different types of distributor are available:Order No. 9200 - PowerBUS to PWM AdapterQuadruple distributor with integral BUS/PWM con-verterOrder No. 9210 - PowerBUS to BUS AdapterQuadruple distributor for bus-enabled servosOrder No. 9220 - PowerBUS SplitterSplitter, for converting one PowerBUS lead intotwoThe following standard cable lengths are available:Order No. 9126/30PowerBUS connecting lead, MPX plug / MPX socket, length 30 cmOrder No. 9126/60PowerBUS connecting lead, MPX plug / MPX socket, length 60 cmOrder No. 9126/90PowerBUS connecting lead, MPX plug / MPX socket, length 90 cmOrder No. 9126/120PowerBUS connecting lead, MPX plug / MPX socket, length 120 cmWe can also make up PowerBUS connecting leads to the exact lengths you require. Please refer to our webshop, where you will find a configuring tool for this purpose.2. DESCRIPTION OF POWERBUS COMPONENTSa) PowerBUS SplitterThe PowerBUS Splitter is required if the PowerBox does not feature a sufficient number of outputs. For example, if you wish to use the bus technology for both wings as weil as elevator and rudder, you will need a total of three bus leads. The following diagram shows a typical PowerBUS installation:PowerBUS ComponentsPowerBUS WiresServo Wiresb) PowerBUS to BUS AdapterThe PowerBox to BUS Adapter is designed for use with servos which are fitted with an integral bus decoder. At present these are Futaba S-Bus servos. When the-se servos are used, the channel assignment is programmed directly at the servo. The PowerBox to BUS Adapter does not feature a decoder, but nevertheless all the outputs are protected against short-circuits both in the signal wire and the power supply wires, as you would expect. The adapter includes integral signal amplifiers for all servo outputs as weil as the adapter's PowerBUS output. This means that as many bus adapters as required can be connected in series, i.e. cascaded.c) PowerBUS to PWM AdapterThe PowerBox to PWM Adapter is used for servos which are not filled with a bus decoder. In this case the channel assignment is defined at the PowerBUS to BUS Adapter. The bus signal is decoded in the adapter, which then generates conventi-onal PWM signals for the servos. This unit allows all known makes of servo to be operated with the PowerBUS system. As with the other adapters, all the outputs are protected against short-circuits both in the signal wire and the power supply wires. The adapter includes integral signal amplifiers for all servo outputs as well as the adapter's PowerBUS output. This means that as many bus adapters as re-quired can be connected in series, i.e. cascaded.3. THE POWERBUS - BASIC INFORMATIONThe PowerBUS can carry 16 channels + 2 switched channels. lt is possible to as-sign any functions you wish to the bus, thanks to the unrestricted channel assign-ment facilities of the Champion SRS and Royal SRS. This is important: for examp-le, if you wish to assign the aileron signal - as it comes from the transmitter - to the PowerBUS, and also wish to include the gyro gain and servo match settings. The door sequencer function can also be assigned to the PowerBUS.a) Procedure for setting up the PowerBoxRequirement for subsequent steps:The type of radio control system must be entered correctly at the PowerBox.lf you are using a gyro (with the Royal SRS), you must first complete the iGyro As-sistant procedure to complete the channel assignment on the input side.The first step in assigning particular outputs to the bus is to assign the function in the Output Mapping menu of the PowerBox:You will find this standard display in the OUTPUT MAPPING menu of the Royal SRS. Functions can only be assigned to the PowerBUS if they have already been defined under OUTPUT MAPPING.These instructions include an example which shows the step-by-step procedure for assigning the bus; it also shows how to use the ServoMatch function in conjunction with the PowerBUS.The function of output G is GYRO AILERON A, and the function of output H is also GYRO AILERON A. At first sight the function of both outputs is the same. However, these two functions are to be assigned to an aileron actuated by two servos. The ServoMatch function is used for fine-tuning, to ensure that the travel of both servos is identical.Note: in the case of the Champion SRS it is only possible to select the DIRECT 1 - 16 and DS1 - 6 outputs instead of the gyro channels.Once the function assignment process is complete, move the cursor to the left to P-BUS and confirm your choice by pressing the SET button. You will see this display:The column under P-BUS indicates the PowerBUS channel number. CH1 - CH16 are proportional channels, while CH17 and CH18 are switched channels. At a later stage these numbers are crucial when we move on to programming the servo or the PowerBUS adapter.The OUTPUT is user-variable; here you determine which PowerBox output (A - X) is assigned to the selected BUS channel (1 - 18).The FUNCTION column shows which function is assigned to the output you have selected. This provides a clear overview of the functions which are already assi-gned to the bus.In our example the gyro function GY AILERON A has been assigned to outputs G and H, so that these two functions can be fine-tuned later using the ServoMatch function. At the PowerBUS they have been assigned to channel numbers 2 and 3.b) Procedure for setting up the PWM AdapterOur function GY AILERON A is now assigned to bus channels 2 and 3. The next stage must be to inform the PowerBUS to PWM Adapter (description under 2c) which bus channel is to be generated at which of the four sockets (servo 1 - 4).This is the procedure:b1) Do not connect the adapter to the PowerBUS lead at this stage.b2) Connect the PowerBUS lead to the PowerBox.b3) Press the SET button on the adapter while you plug in the PowerBUS lead.b4)T he red LED lights up at servo 1, then moves step-by-step to servo 4 while you hold the button pressed in.b5)R elease the button when the red light is aligned with the servo output which you want to set up. The red LED now shines less strongly.b6)T o program the output: Briefly press the button the same number of times as the channel which you wish to set up. Tor example, press the button five times in sequence for channel 5.b7)W hen you have finished programming one output, save the setting simply by disconnecting the adapter from the PowerBUS lead. Resume at Point b2) to assign a further output.Back to our example with two ailerons:Hold the SET button pressed in while you connect the bus adapter, then immedia-tely release it again. Servo output 1 at the adapter is required to generate PowerBox output G: press the SET button twice in order to assign bus channel 2 to servo output 1. Now disconnect the bus adapter again.Hold the SET button pressed in once more while you connect the bus adapter, but this time wait until the LED moves on to servo output 2. Servo output 2 at the adap-ter is required to generate PowerBox output H: press the SET button three times in order to assign bus channel 3 to servo output 2. Disconnect the bus adapter again. Now connect the bus adapter and the two servos (outputs 1 and 2), and move the aileron stick at the transmitter: the two servos should operate in parallel.At this point you should call up the ServoMatch function at the PowerBox to ensure that the two aileron servos do not work against each other mechanically.First select output H, and fine-tune the servo which is connected to servo output 2 at the PowerBUS adapter to match the movement of the first servo. Refer to the instructions supplied with the Royal / Champion SRS for a detailed description of this procedure.4. POWERBUS CABLEPowerBUS cable is manufactured specially for PowerBox-SystemsBUS cable is extremely flexible, and is made up using very thin individual strands in order to pass the maximum current through the given cross-sectional area of 1.5mm2. The insulation is made of a special material which is also employed in full-size aviation. lt is virtually indestructible, and offers excellent protection even when reduced to just a thin film around the copper conductor. This insulation pro duces a weight reduction of about 30% compared with the much cheaper PVC. The insulation is not inflammable, and its heat resistance is much higher than the usual PVC.To save more weight, the conductors are of different thickness: power is carried by two thick wires (1.5mm2), while a thin wire of 0.25mmproduces a further weight saving of 27%.The picture clearly shows the thin insulation, the fine individual strands, and the5. PIN ASSIGNMENTOne great advantage of the PowerBUS is that it employs standard commercial MPX connectors. We supply PowerBUS leads in standard lengths, but can also make them up to the lengths you need. Please note that some installations present problems, with the result that the connectors can only be attached once the lead has been installed.The following photos show the correct pin assignments:PowerBUS socket PowerBUS plug6. SERVICE NOTEWe make every effort to provide a good service to our customers, and have now established a Support Forum which covers all queries relating to our products. This helps us considerably, as we no longer have to answer frequently asked questions again and again. At the same time it gives you the opportunity to obtain assistance all round the clock, and even at weekends. The answers come from the PowerBox team, which guarantees that the answers are correct.Please use the Support Forum before you contact us by telephone.You will find the forum at the following address:7. GUARANTEE CONDITIONSAt PowerBox-Systems we insist on the highest possible quality standards in the development and manufacture of our products. They are guaranteed “Made in Germany”!That is why we are able to grant a 24 month guarantee on the PowerBox acces-sory from the initial date of purchase. The guarantee covers proven material faults, which will be corrected by us at no charge to you. As a precautionary measure, we are obliged to point out that we reserve the right to replace the unit if we deem the repair to be economically unviable.Repairs which our Service department carries out for you do not extend the original guarantee period.The guarantee does not cover damage caused by incorrect usage, e.g. reverse polarity, excessive vibration, excessive voltage, damp, fuel, and short-circuits. The same applies to defects due to severe wear.We accept no liability for transit damage or loss of your shipment. If you wish to make a claim under guarantee, please send the device to the following address, together with proof of purchase and a description of the defect:8. LIABILITY EXCLUSIONWe are not in a position to ensure that you observe our instructions regarding in-stallation of the PowerBox accessory, fulfil the recommended conditions when using the unit, or maintain the entire radio control system competently.For this reason we deny liability for loss, damage or costs which arise due to the use or operation of the PowerBox accessory, or which are connected with such use in any way. Regardless of the legal arguments employed, our obligation to pay damages is limited to the invoice total of our products which were involved in the event, insofar as this is deemed legally permissible.We wish you every success using your new PowerBUS ! Donauwoerth, December 2020SERVICE ADDRESS PowerBox-Systems GmbH Ludwig-Auer-Straße 5D-86609 Donauwoerth Germany。
BES MQ User Guide1.0
BES MQ用户手册北京宝兰德软件技术服务有限公司BES Technology & Service Co.,Ltd.版权所有侵权必究All rights reserved前言本文档是BES MQ产品的用户手册,详细介绍BES MQ的配置和管理。
本手册的组织结构与管理控制台的布局基本对应,每章都以概念性信息开头,随后的部分说明如何使用管理控制台进行特定的操作。
本文档适合的对象本手册主要适用于BES MQ产品的配置和管理人员,部分内容同样适用于基于BES MQ 进行消息中间件应用开发的开发人员。
本手册假定您已经具备如下技能:1. 基本系统管理;2. 安装软件;3. 使用Web浏览器;4. 启动BES MQ代理实例;5. 在终端窗口中发布命令。
约定BES MQ定义了一些变量来表示BES MQ目录等信息,本文档中涉及到的有:变量说明${com.bes.mq.installRoot} BES MQ安装目录${com.bes.mq.brokerRoot} BES MQ代理实例目录产品文档集BES MQ提供的文档集包括:1.快速开始:提供BES MQ的概览,介绍BES MQ的基本操作和使用。
2.安装手册:详细介绍如何在各个操作系统上安装BES MQ,以及产品的注册过程。
3.用户手册:详细介绍BES MQ的配置和管理。
4.开发手册:详细介绍基于BES MQ的消息中间件应用的开发过程。
技术支持BES MQ提供全方位的技术支持,获得技术支持的方式有:网址:Support Email:support@Support Tel:400 650 1976在取得技术支持时,请提供如下信息:1.姓名2.公司信息及联系方式3.操作系统及其版本4.BES MQ版本5.日志等错误的详细信息目录第1章BES MQ产品介绍 (1)1.1关于BES MQ (1)1.2产品特性 (1)1.3支持的平台环境 (1)1.4支持的规范 (3)1.5产品体系结构 (3)1.5.1 实例体系结构 (3)1.5.2 集群体系结构 (4)第2章管理控制台 (6)2.1关于管理控制台 (6)2.2使用管理控制台 (6)2.2.1 启动和停止 (6)2.2.2 访问 (6)2.2.3 登录 (7)2.2.4 管理控制台布局 (7)第3章代理列表 (9)3.1代理列表 (9)3.2代理列表配置 (9)3.2.1 新建代理 (9)3.2.2 编辑代理 (9)3.2.3 删除代理 (9)3.2.4 重启代理 (10)第4章代理实例 (11)4.1代理实例配置 (11)4.1.1 基本信息 (11)4.1.2 系统资源 (12)4.1.3 JVM配置 (12)第5章队列 (14)5.1基本队列列表 (14)5.2基本队列列表配置 (14)5.2.1 新建基本队列 (14)5.2.2 编辑基本队列 (14)5.2.3 删除基本队列 (15)5.3组合队列列表 (15)5.4组合队列列表配置 (15)5.4.1 新建组合队列 (15)5.4.2 编辑组合队列 (15)5.4.3 删除组合队列 (16)第6章主题 (17)6.2基本主题列表配置 (17)6.2.1 新建基本主题 (17)6.2.2 编辑基本主题 (17)6.2.3 删除基本主题 (18)6.3组合主题列表 (18)6.4组合主题列表配置 (18)6.4.1 新建组合主题 (18)6.4.2 编辑组合主题 (18)6.4.3 删除组合主题 (19)第7章策略 (20)7.1队列策略列表 (20)7.2队列策略列表配置 (20)7.2.1 新建队列策略 (20)7.2.2 编辑队列策略 (22)7.2.3 删除队列策略 (22)7.3主题策略列表 (22)7.4主题策略列表配置 (22)7.4.1 新建主题策略 (22)7.4.2 编辑主题策略 (25)7.4.3 删除主题策略 (25)第8章消息存储 (26)8.1消息存储 (26)8.2消息存储配置 (26)8.2.1 file类型存储 (26)8.2.2 jdbc类型存储 (28)8.2.3 memory存储类型 (29)第9章连接工厂 (30)9.1连接工厂列表 (30)9.2连接工厂列表配置 (30)9.2.1 新建连接工厂 (30)9.2.2 编辑连接工厂 (31)9.2.3 删除连接工厂 (31)第10章监听器 (33)10.1监听器列表 (33)10.2监听器列表配置 (33)10.2.1 新建监听器 (33)10.2.2 编辑监听器 (34)10.2.3 删除监听器 (34)第11章集群服务 (35)11.1集群服务列表 (35)11.2.1 新建集群服务 (35)11.2.2 编辑集群服务 (36)11.2.3 删除集群服务 (36)第12章JMX服务 (37)12.1JMX服务 (37)12.2JMX服务配置 (37)第13章JNDI服务 (38)13.1JNDI服务 (38)13.2JNDI服务配置 (38)第14章监控服务 (39)14.1监控服务 (39)14.2监控对象 (39)14.2.1 代理 (39)14.2.2 队列 (40)14.2.2.1 消息浏览 (40)14.2.2.2 消费者浏览 (41)14.2.2.3 实时监控 (42)14.2.3 主题 (42)14.2.3.1 在线/离线订阅者浏览 (43)14.2.3.2 实时监控 (44)14.2.4 连接 (44)第15章安全服务 (45)15.1安全服务 (45)15.2用户管理配置 (45)15.2.1 新建用户 (45)15.2.2 编辑用户 (45)15.2.3 删除用户 (45)15.3组管理配置 (45)15.3.1 新建组 (46)15.3.2 编辑组 (46)15.3.3 删除组 (46)15.4认证配置 (46)15.5授权配置 (46)15.5.1 新建授权 (46)15.5.2 编辑授权 (47)15.5.3 删除授权 (47)15.6SSL配置 (47)第16章日志服务 (49)16.1日志服务 (49)16.2日志服务配置 (49)17.1桥接服务 (51)17.2桥接服务列表配置 (51)17.2.1 新建桥接服务 (51)17.2.2 编辑桥接服务 (52)17.2.3 删除桥接服务 (52)第18章用户管理 (53)18.1用户管理 (53)18.1.1 用户查询 (53)18.1.2 用户信息列表 (53)18.1.3 新建用户 (53)18.1.4 编辑用户 (54)18.1.5 删除用户 (54)18.1.6 启用用户 (54)18.1.7 禁用用户 (54)第19章附录 (55)19.1附录命令 (55)BES MQ产品提供的所有命令列表 (55)第1章 BES MQ产品介绍1.1 关于BES MQBES MQ是一款构建于BES微内核体系之上,基于消息传递机制进行平台无关的数据交换的消息中间件产品。
ETC Power Control Series 传感器智能断路器系统说明书

G E N E R A L I N F O R M A T I O NETC’s Sensor IQ Intelligent Breaker System provides mains-fed power distribution for up to 48 branch circuits in the industry’s most compact footprint. Sensor IQ breakers combine high-inrush rated overcurrent protection, switched power control, and power usage/ breaker status reporting in a single device. With built-in station, sensor, DMX and TimeClock controls and Ethernet connectivity, plus optional 0-10V dimming, DALI output, contact inputs, and isolated ground bar for audio loads, the Sensor IQ integration opportunities are limitless.APPLICATIONS• Theaters• Schools• Houses of worship• Conference centers• Stadiums and arenasFEATURES• M ain Feed: 240/415V or 277/480V four-wire plus ground• 12-, 24- or 48-position breaker subpanel• Breakers-Hydraulic magnetic breaker with high inrush trip curve-10kA or 14kA SCCR (or 65kA series rated with main fuse)-Freely mix one-pole breakers up to 30A-Integrated air-gap relay switching-Integrated on/off/tripped and connected load feedback-No power required for relay operation at the breaker• Echo, sACN, DMX-512, TimeClock, or stand-alone control• B uilt-in EchoConnect power supply for up to 6 Echo stations/sensors and 5 output products• Built-in network interface provides:-Advanced control of relays over streaming ACN (sACN)-Measured energy usage reporting per branch circuit-Web UI for configuration• Available 0-10V, contact input or DALI control cards• U L924 LISTED emergency control bypass contact input withload shedding O R D E R I N G I N F O R M A T I O NPanel OptionsMODEL DESCRIPTIONIQ12-277277/480V 12-circuit breaker panelIQ24-277277/480V 24-circuit breaker panelIQ48-277277/480V 48-circuit breaker panelMODEL DESCRIPTIONIQ12-240240/415V 12-circuit breaker panelIQ24-240240/415V 24-circuit breaker panelIQ48-240240/415V 48-circuit breaker panelNote: Select surface or recess door belowDoor OptionsIQ DOOR 277-12R Recess-mount door for IQ12-240 or -277IQ DOOR 277-12S Surface-mount door for IQ12-240 or -277 IQ DOOR 277-24R Recess-mount door for IQ24-240 or -277IQ DOOR 277-24S Surface-mount door for IQ24-240 or -277 IQ DOOR 277-48R Recess-mount door for IQ48-240 or -277IQ DOOR 277-48S Surface-mount door for IQ48-240 or -277 Optional Main Fuse KitIQ277-MF200Main Fuse Kit: 277/480V (240/415V), 200A, 65kASCCROptional Main BreakerIQ277-MB100Main Breaker: 277/480V (240/415V), 100AIQ277-MB200Main Breaker: 277/480V (240/415V), 200AIQ277-MB400Main Breaker: 277/480V (240/415V), 400A NOTE: M ain breakers for 240/277V IQ panels are for convenience disconnect. To increase series SCCR, use the IQ Main Fuse Kit.See page 4 for more accessory information.Echo Power RequirementsEchoConnect: 1 Unit of Output PowerAuxiliary Power:Not RequiredBuilt-in EchoConnect Power SupplyEchoConnect:Provides 6U of control power andan additional 5U of Output Power*Auxiliary Power:Not Provided*Note: Built in power supply can be disabled.Echo PresetsSupports 64 Echo Presets; up to 8 Echo spacesFor more information, download the Echo Quick GuideS P E C IF IC A T IO N SREGULATORY AND COMPLIANCE• Breakers listed to UL 489• Enclosures listed to UL 67, UL 508, UL 924• C omplies with ANSI DMX512-A standard• Complies with ANSI E1.31 streaming ACN standardUSER INTERFACE• Graphical display• Button interface-0-9 number entry-Up, down and back-arrow navigation with enter-T est shortcut for local activation of preset, sequence andset level overrides• USB interface for uploads of setup and software updates• Onboard Web UI for simple configuration and management BREAKER• H ydraulic magnetic breaker maintains trip curve throughentire thermal range, reducing nuisance tripping• Supports 15A, 20A or 30A single-pole breakers• Utilizes stab on bus connection• 50/60hz frequency• I nrush-pulse tolerance: 25 times rated current for half-cycle• Integrated hall-effect sensors detect contact positions• Integrated solenoid for remote operation• T rips on overload even if handle is forcibly held in the “on”position• M aintains trip curve through entire thermal range, reducingnuisance tripping• Load lugs accept 6-14AWG load wiring• Multi-conductor rated output terminal• Integral mechanically held air gap relay• M anual control of relay state using breaker handle withoutpower• Integral current sensing• C ontrol and status provided by contact pads directly atbottom of the breaker case. No external wires or connectionsrequired for control or feedback• R emote Feedback for breaker state, breaker type, currentdraw and phase voltage• Visible state indication:LED Handle IndicationLED on Handle on Output activeLED off Handle on Remotely controlled offLED off Handle off Breaker tipped/Manually off BREAKER CONTROL OPERATIONAL RATINGS• No load-remote switching 1,000,000 cycles• 24A Resistive 100,000 cycles• 15A Electronic ballast (LED) 100,000 cycles• Handle operations 10,000 cycles• Duty cycle of 6 full cycles (12 operations) per minute• Supports voltage isolation of 4000V RMS• Utilizes latching state relays S P E C IF IC A T IO N SMECHANICAL• E nclosure constructed of 16-gauge steel finished in black,fine-textured, scratch-resistant powder coat pain• R emovable outer panel includes integral locking door to limitaccess to electronics, breakers and local relay overrides• Full front access with no side clearance required• R emovable covers for access to Class 1 and Class 2 wiring• Complies with California building code - seismic zone four ELECTRICAL• M ains feed power input: 240/415V or 277/480V four-wireplus ground• M ax current input: 100A at 12 circuits, 200A at 24 circuitsand 400A at 48 circuits• Quiescent draw: <10W with relays at steady state• Optional isolation between chassis and equipment grounding • S hort-circuit rating: 10,000, 14,000 or 65,000 Ampssymmetrical (See chart at right)• Overloads occurs at 50 operations of 600% of rated current • Integrated current transformer• C urrent measurement range of 1-30A. The maximum crestfactor of primary current is 2.5• Feeder entry supported at top or top side-B ottom or bottom side entry supported by rotatingenclosure during installation• Load wire entry supported on top, sides or bottomSHORT-CIRCUIT CURRENT RATING AND LUG SIZING TYPE MAXRATINGSCCRRATINGINPUT LUG WIRESIZEMain Lug100A,200A,400A10kA, 14kA2x6AWG-250kcmil(or 1x500kcmilw/ kit for 48cktpanels), 1x350kcmilneutral (dual lug on48 channel panel),1x14AWG-2/0ground (1x6AWG-350kcmil on 48channel panel)Main Fuse200A65kA2x6AWG-250kcmil BranchBreaker15A, 20A,30A10 or 14kA6-14AWG solid orstranded class B,C, K;10,12 or 14 AWGdual conductorGND/Neutral NA NA6-14AWGNote: Main feed lugs accept copper or aluminum wire; branch breakers accept copper wire only.S P E C IF IC A T IO N SENVIRONMENTAL• Thermal: 0-40°C; 32-104°F operating temperature-24A circuit (30A breaker) - 1.4W, 4.8 BTU/hr-16A circuit (20A breaker) - 1W, 3.4 BTU/hr• Humidity; 5-95% non-condensing• Complies with ESD immunity to IEC standard 1000-4-2 FUNCTIONAL• System-Wide control-DMX input·Per-circuit patching·Per-circuit patch exclusions·Per-circuit threshold·0-200 prioritization (matches sACN priorities)-Choice of DMX loss behavior: Hold last look or wait time-sACN input·Circuit-by-circuit patching·Circuit-by-circuit patch exclusions·0-200 prioritization (matches sACN priorities)-Choice of sACN loss behavior: Hold last look or wait time-Global data loss behavior-UL924 emergency lighting with load shedding·L oad shedding requires a UPS Control Backup Wiring Kit(7131K1817 ) and Uninterruptable Power Supply (UPS)by others·U PS to supply 800W-2400W AC power to controlprocessor• Application/Space segmented Control-Space segmenting: up to eight spaces per panel-Power sequencing-Presets-Zone control: up to 16 zones per space-TimeClock (up to 50 events)·Event types: Preset and sequence activation, Flick warn·Timed hold (24 hours max.)·Auto-timed hold·Indefinite holds·Scheduled event overrides·Calendar and time of day based event scheduler·Holiday shut off·Astronomical time events: sunrise/sunset offsets-I ntegral station power supply (for up to six stations withup to six power panels connected)• Global monitoring-Per circuit·Breaker-trip notification·Relay state·Current draw per circuit·Phase voltage·Energy usage-Per space·Active sequences·Active presets·Zone levels·Active-clock events S P E C IF IC A T IO N SOPTION CARDS AND ACCESSORIES0-10 Dimming Option• 24 outputs of 0-10V sink dimming control ratedfor 400mA per outputContact Input Option• 24 dry contact inputs which can be used to:-t rigger presets and sequences, which will play at thepriority configured for architectural sources, or;-d irectly control one or more outputs. The priority of theseoutputs is configurable. If nothing is configured, the lastaction takes precedenceDALI Control Option• 24 control loops of broadcast DALI control• Each loop supports up to 64 ballasts• External DALI power supply requiredRide Thru Option• Short-term power backup of control electronics• Automatically engages when power is lost• Recharges during normal power operationUPS Backup Kit for Load Shedding• A llows Power Control Processor to be powered via externalUPS (by others)• Required for load shedding applications• U PS provides power to drive relays off when normal poweris lost• U PS for each Sensor IQ panel must by UL 924 Listed andrated for a minimum of 200W peak loadBranch Circuit Fuse Kit• D IN-rail electrical enclosure with choice of 6, 12 or 24 fuseholders for class-CC fusing placed on the output of thebreaker/relay• A ids engineers in selective coordination* ofemergency circuitsN ote: Selective coordination is a study on emergency systems that assures that an overcurrent on the output of any downstream branch circuit results in that branch tripping/clearing before the upstream mains breakers.S E N S O R I Q B R E A K E R SGENERAL INFORMATIONETC’s Sensor IQ breaker is a high-quality, UL 489 Listed circuit breaker which incorporates the ability to rapidly switch the load using an internal solenoid when the breaker is in the ‘on’ position. The IQ breaker is designed with a high-inrush trip curve to handle the demands of modern entertainment and architectural lighting fixtures. IQ’s unique hydraulic-magnetic trip mechanism maintains this trip curve throughout the operating temperature of the breaker, giving you outstanding protection against nuisance tripping.A variant of the breaker without switching is available for standard breaker-panel applications.Sensor IQ breakers are designed for use in Sensor IQ panels only.Intelligent Breakers with SwitchingMODEL RATED CURRENT POLES IQ SM B15-27715A 1-Pole IQ SM B20-27720A 1-Pole IQ SM B30-27730A1-PoleNOTE: All of the above branch circuit breakers are compatible with 240/415V systems.O P T I O N C A R D S A N D A C C E S S O R I E SMODEL DESCRIPTIONIQ-LVD 0-10V Dimming Control Option IQ-DALI DALI Control Option IQ-CI Contact Input OptionIQ-UPS-KITUPS Control Backup Wiring Kit - required for shedding normal loads when the emergency state is active; a UL 924 Listed UPS (provided by others) with a minimum load rating of 200W peak load is recommended for each Sensor IQ panel for load shedding applications IQ-RTORideThru OptionIQ277-500KCMIL IQ-48 500kcmil feeder lug kit for support of 400A feeders up to 500kcmilIQSC-6, -12, -24Branch circuit fuse boxes that may be used for selective coordination of loads (see p.3 for details)IQ12/24 ISO GND, IQ48 ISO GND Isolating ground bar*NEW* IQ-TAPMains feed tap kit for normal sense circuits for emergency lighting control (not for use with ELTS2)Echo Sensors, Stations, Zone Controllers, Station Power Modules and InterfacesStandard Breakers without SwitchingMODEL RATED CURRENT POLES IQ B15-27715A 1-Pole IQ B20-27720A 1-Pole IQ B30-27730A1-PoleNOTE: All of the above branch circuit breakers are compatible with 240/415V systems.T I M E C U R R E N T C U R V ES E N S O R I Q B R E A K E R P H Y S I C A L S P E C I F I C A T I O N S6-18AWGCAGE CLAMP TERMINAL6 of 7P H Y S IC A LSensor IQ DimensionsMODEL HEIGHT WIDTH DEPTHin mm in mm in mm IQ12-277(240)491,24520508 5.11130 IQ24-277(240)551,39720508 5.11130 IQ48-277(240)731,85520508 5.11130Sensor IQ WeightsMODEL WEIGHT SHIPPING WEIGHTlb kg lb kg IQ12-277(240)40.018.244.620.3 IQ24-277(240)50.022.754.024.5 IQ48-277(240)86.039.091.341.4IQ12-277(240)IQ24-277(240)IQ48-277(240)Corporate Headquarters Middleton, WI USAGlobal Offices London, UK Rome, IT Holzkirchen, DE Paris, FR Hong Kong Singapore New York, NY Orlando, FL Los Angeles, CA Copyright©2019 ETC. All Rights Reserved. All product information and specifications subject to change. Rev L 06/19Trademark and patent info: /IP。
Xbee模块API指令技术文档(第1版by宋涛).doc

Xbee模块API指令技术文档——by 宋涛2008-11-19参数和固件烧录:xbee模块使用API指令必须先将Module烧录入API参数和固件(另一种为AT,在AT指令时烧录)。
方法为在X-CTU软件的Modem Configuration 选项卡内的Modem项选中XB24-B,Fuction Set 内选中Znet 2.5 Coordinator API或者Znet 2.5 Router/End Device API选项(根据该module 要扮演的角色决定,在烧录AT情况下,选择类似的选项。
),Version选项不用选择,会自动调整。
然后在Modem Parameters and Firmware下点击write进行烧录。
强烈建议在write前先勾选中always update firmware选项。
注意:1.烧录完成前,如是模块状态是AT指令状态下,不能先勾选上PC settings里面的Enable API。
如果模块状态是API指令状态下,必须先勾选上PC settings里面的Enable API。
否则,烧录会失败。
2.烧录完成后,如果PC settings里面的Enable API项没有选中,必须勾选上,如果要使用逃脱字,则需要勾选上ATAP=2项。
3.当前烧录版本是针对当前实验室版本,如果版本变化,烧录过程会有部分调整。
4.Modem Configuration里面Read为读取当前module参数状况,主要用于调试中网络不通时,检查modules之间参数设置是否正确时使用。
Restore为重置module的状态为最近一次烧录入firmware后的初始状态。
API Operations:注意:1.xbee目前的各个版本之间的API Operation是有区别的,该文档以Znet2.5版本为准。
2.该文档对API Operation的讲述以在实验过程中常遇到的指令为主,若本文档中未包含的API frame,请参见《XBee™ ZNet 2.5/XBee-PRO™ ZNet 2.5 OEM RF Modules》。
广州首易信息技术有限公司API接口使用手册说明书
广州首易移动业务A P I (W e b S e r v i c e)使用手册广州首易信息技术有限公司2012年1月目录一、引言 (4)1.1 编写目的 (4)1.2 背景说明 (4)1.3 术语定义 (4)二、概述 (5)2.1 接口功能 (5)2.2 接口组成 (5)三、接口介绍 (6)3.1 网络结构 (6)3.2 运行环境 (6)3.3连接方式 (6)3.4 WebService地址 (6)3.5 WSDL描述文件 (7)四、API函数说明 (7)4.1短信部分 (7)4.1.1 Sms_Send函数 (7)4.1.2 Sms_GetRecv函数 (8)4.1.3 Sms_GetReport函数 (9)4.1.4 Sms_GetSign函数 (10)4.1.5 Sms_GetBalance函数 (10)4.2彩信部分 (11)4.2.1 Mms_UpFile函数 (11)4.2.2 Mms_GetFileStatus函数 (12)4.2.3 Mms_Send函数 (13)4.2.4 Mms_GetRecv函数 (14)4.2.5 Mms_GetReport函数 (15)4.3批量任务部分 (16)4.3.1 Task_UpFile函数 (16)4.3.2 Task_DelFile函数 (17)4.3.3 Task_SmsSend函数 (18)4.3.4 Task_GetSmsStatus函数 (19)4.3.5 Task_SmsStop函数 (20)4.3.6 Task_SmsStart函数 (20)4.3.7 Task_MmsSend函数 (21)4.3.8 Task_GetMmsStatus函数 (22)4.3.9 Task_MmsStop函数 (23)4.3.10 Task_MmsStart函数 (24)五、附件 (24)5.1错误代码汇总表 (24)5.2短信/彩信状态码汇总表 (27)5.3批量任务短信/彩信状态码汇总表 (27)一、引言1.1 编写目的广州首易的移动商务平台提供了强大的移动业务接入机制,现支持短信、彩信的全国应用。
FBOCOM_OpenCPUAP用户手册_V108

V1.0.2 V1.0.3 V1.0.4 V1.0.5 V1.0.6 V1.0.7 V1.0.8
2013-10-12 2013-11-13 2014-04-09 2014-06-17 2014-12-26 2015-02-07 2015-08-24
OpenCPU API 用户手册
Page 2 of 27
适用型号
序号 1 2 3 4 5 产品型号 G510-Q50-00 G510-Q50-90 G510S-Q50-00 G610-A20-XX G610-Q20-xx 说明 标准型号,可升级一体化软件 一体化型号,通过外部标签与其他型号区分 包含 CE 认证,可升级一体化软件
OpenCPU API 用户手册
OpenCPU API 用户手册
文档版本:V1.0.8 更新日期:2015.08.24
版权声明
版权所有©2015 深圳市广和通无线股份有限公司。保留一切权利。 非经本公司书面许可,任何单位和个人不得擅自摘抄、复制本文档内容的部分或全部,并不得以任何形式 传播。
注意
由于产品版本升级或其他原因,本文档内容会不定期进行更新。除非另有约定,本文档仅作为使用指导, 本文档中的所有陈述、信息和建议不构成任何明示或暗示的担保。
Page 3 of 27
目录
1 前言.................................................................................................................................................................... 5 2 文件系统接口.................................................................................................................................................... 5 3 定时器接口........................................................................................................................................................ 8 4 硬件接口............................................................................................................................................................ 8 5 OS 接口函数.................................................................................................................................................... 13 6 输入输出接口.................................................................................................................................................. 15 7 Socket 程序接口..............................................................................................................................................16 8 SSL 接口函数.................................................................................................................................................. 19 9 用户参数设置读取接口.................................................................................................................................. 21 9.1 sys_set 参数说明................................................................................................................................. 21 9.2 sys_get 参数说明................................................................................................................................ 22 10 其他接口函数................................................................................................................................................ 23 11 用户回调函数................................................................................................................................................ 24 12 系统事件(信号)定义............................................................................................................................... 25 13 API 返回码..................................................................................................................................................... 26
ESDPS用户手册
工程测量数据处理系统用户手册
5-1 道路测设功能及适用范围............................................................................. 43 5-2 作业流程......................................................................................................... 43 5-3 道路测设数据录入方法................................................................................. 44 5-4 道路测设报表成果输出................................................................................. 48 5-5 道路测设图形成果输出................................................................................. 50 5-6 关于路线测量断链......................................................................................... 51 第六章 公路设计...................................................................................................................53 6-1 路基超高及加宽计算.............................
NPServe用户指南 Comm模块MN024002EN有效日期2017年2月说明书

NPServe Users GuideDISCLAIMER OF WARRANTIES AND LIMITATION OF LIABILITYThe information, recommendations, descriptions and safety notations in this document are based on Eaton Corporation’s (“Eaton”) experience and judgment and may not cover all contingencies. If further information is required, an Eaton sales office should be consulted. Sale of the product shown in this literature is subject to the terms and conditions outlined in appropriate Eaton selling policies or other contractual agreement between Eaton and the purchaser.THERE ARE NO UNDERSTANDINGS, AGREEMENTS, WARRANTIES, EXPRESSED OR IMPLIED, INCLUDING WARRANTIES OF FITNESS FOR A PARTICULAR PURPOSE OR MERCHANTABILITY, OTHER THAN THOSE SPECIFICALL Y SET OUT IN ANY EXISTING CONTRACT BETWEEN THE PARTIES. ANY SUCH CONTRACT STATES THE ENTIRE OBLIGATION OF EATON. THE CONTENTS OF THIS DOCUMENT SHALL NOT BECOME PART OF OR MODIFY ANY CONTRACT BETWEEN THE PARTIES. In no event will Eaton be responsible to the purchaser or user in contract, in tort (including negligence), strict liability or otherwise for any special, indirect, incidental or consequential damage or loss whatsoever, including but not limited to damage or loss of use of equipment, plant or power system, cost of capital, loss of power, additional expenses in the use of existing power facilities, or claims against the purchaser or user by its customers resulting from the use of the information, recommendations and descriptions contained herein. The information contained in this manual is subject to change without notice.ii Users GUide MN024002EN February 2017ContentsDISCLAIMER OF WARRANTIES AND LIMITATION OF LIABILITY . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .ii SAFETY FOR LIFE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .iv SAFETY INFORMATION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .iv Safety instructions (iv)NPSERVE USERS GUIDE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1 Connections (1)Connection details (2)Real-time data (3)Configuration (3)DNP SCADA (4)Diagnostics (5)System. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5 USB maintenance port (5)iiiUsers GUide MN024002EN February 2017NPServe Users GuideUsers GUide MN024002EN February 2017Safety for lifeEaton meets or exceeds all applicable industry standards relating to product safety. We actively promote safe practices in the use and maintenance of our products through our service literature, instructional training programs, and the continuous efforts of all Eaton employees involved in product design, manufacture, marketing, and service.We strongly urge that you always follow all locally approved safety procedures and safety instructions when working around high voltage lines and equipment, and support our “Safety For Life” mission.Safety informationThe instructions in this manual are not intended as a substitute for proper training or adequate experience in the safe operation of the equipment described. Only competent technicians who are familiar with this equipment should install, operate, and service it.A competent technician has these qualifications:●●Is thoroughly familiar with these instructions.●●Is trained in industry-accepted high and low-voltage safe operating practices and procedures.●●Is trained and authorized to energize, de-energize, clear, and ground power distribution equipment.●●Is trained in the care and use of protective equipment such as arc flash clothing, safety glasses, face shield, hard hat, rubber gloves, clampstick, hotstick, etc. Following is important safety information. For safe installation and operation of this equipment, be sure to read and understand all cautions and warnings.This manual may contain four types of hazard statements:Indicates an imminently hazardous situation which, ifnot avoided, will result in death or serious injury . Indicates a potentially hazardous situation which, if notavoided, could result in death or serious injury .Indicates a potentially hazardous situation which, if not avoided, may result in minor or moderate injury .CAUTIONIndicates a potentially hazardous situation which, if not avoided, may result in equipment damage only .Safety instructionsFollowing are general caution and warning statements that apply to this equipment. Additional statements, related to specific tasks and procedures, are located throughout themanual.Hazardous voltage . Contact with hazardous voltage will cause death or severe personal injury . Follow all locally approved safety procedures when working around high- and low-voltage lines and equipment .G103 .3Before installing, operating, maintaining, or testing this equipment, carefully read and understand the contents of this manual . Improper operation, handling or maintenance can result in death, severe personal injury, and equipment damage .G101 .0This equipment is not intended to protect humanlife . Follow all locally approved procedures and safety practices when installing or operating this equipment . Failure to comply can result in death, severe personal injury and equipment damage .G102 .1Power distribution and transmission equipment must be properly selected for the intended application . It must be installed and serviced by competent personnel who have been trained and understand proper safety procedures . These instructions are written for such personnel and are not a substitute for adequate training and experience in safety procedures . Failure to properly select, install or maintain power distribution and transmission equipment can result in death, severe personal injury, and equipment damage . G122 .2iv1NPServe Users GuideUsers GUide MN024002EN February 2017NPServe Users GuideFigure 1 . NPServe LayoutThe NPServe must be viewable via its web page in order to use this guide. The IP address and subnet mask must be set up accordingly. Type in the IP address in the user’s desired web browser and the NPServe can be accessed.This guide is intended solely to provide user guidelines on the features, connections, and possible troubleshooting points of the NPServe device.ConnectionsThe NPServe has the following connections:●●Relay 1 (30A)●●INCOM ●●Ethernet ●●Micro USB ●●DNP Port 2●●DNP Port 1●●Analog Inputs ●●Analog PS ●●MPCV Pendant ●●Digital Inputs ●●Power ●●Relay 2 (10A)●●Relay 3 (10A)otee:N Each connection can be selected via the Home webpage shown in Figure 2. If a connection is made, theICON will be active and not grayed out.Figure 2 . Home web page2NPServe Users GuideUsers GUide MN024002EN February 2017Connection detailsRelays1. Relay contacts (1, 2, 3) – Relay 1 is NO contact thatcan handle 30 Amps. Relay 2 and 3 are 10A form C contacts. All three contacts can be controlled by activating the contact on the NPServe web page (see Figure 2). Each contact will change state after selection and will show the state change once action is complete(see Figures 1 and 2).Figure 3 .Open contactFigure 4 . Closed contact2. When the contact is activated, the user will be askedif the action is to be executed. Click OK. A successful contact state change note will appear.Possible troubleshooting1. If an error arises when the contact is selected, pleaseverify that NPServe is active. otee:N Relay will change states with no connections.2. Ensure that the relay is not configured to energize onbootup. (This is configurable from the Configuration page.)INCOM1. The icon is for EATON’s INCOM protocol devices. SeeIL TD17513 for wiring specification.2. Clicking the INCOM connection will allow for quickaccess to the set of INCOM devices polled by the NPServe.Possible troubleshootingIf no device shows up once the icon is selected, verify the INCOM compatible device is connected:1. Verify that INCOM wiring is carried out per IL TD17513.2. Verify the INCOM device is powered and active.3. Verify that NPServe has auto learned devicesconnected to it or has INCOM devices in the configuration uploaded.Ethernet connectionThe Ethernet connection is for the network LANconnections. The port can be used to connect the NPServe to any Ethernet capable device:●●Supports Web Page access●●DNP Slave/Master communications are also available via this connection●●Supports NTP time synchronization●●Selecting the Ethernet ICON will take the user to the NPServe Maintenance Configuration page.Possible troubleshootingIf NPServe is unreachable over Ethernet or is unconfigured, see the USB Maintenance Configuration section.DNP ports (1 and 2)The DNP Ports (1 and 2) are RS485 ports:●●Can be used to connect to the VaultGard or other SCADA Master●●Can be used to connect downstream DNP devicesPossible TroubleshootingSee the DNP SCADA Section.Analog inputsNPServe provides three power rails:●●+5VDC, 150mA load ●●-5VDC, 100ma load ●●AGND (Analog ground)●●250mA total load1. Configurations uploaded to NPServe may contain scalefactors to convert raw voltage readings to engineering units.2. Clicking the green box containing the readings togglesbetween scaled and raw voltage readings.3NPServe Users GuideUsers GUideMN024002EN February 2017Figure 5 . XXXXXXXXPossible troubleshooting1. Verify the proper voltage supply is on the sensor.2. Verify the multimeter and raw voltage readings match.3. Verify supply voltages are +/- 5VDC.4. Ensure there is no short between a power rail andAGND.5. Verify that the proper configuration file is uploaded.MPCV pendant connection●●Intended for direction connection to an MPCV relay ●●Replaces need for pendant hookup to relay ●●Detects +5V signal from MPCV relayDigital input●●Eight individual dry contacts using 125 VAC●●Provides a user friendly way of reading the status of equipment●●An open contact will display no line (see Figure 6).●● A closed contact will display a completed lineconnections.Figure 6 . Open contact displays no linePossible troubleshooting1. Verify no voltage is present on the contact beforeconnection.2. Verify the device changes state before connection.3. Verify the Status change of the device via the WebHome page Digitial Input display (see Figure 6).4. Ensure that there are 0 V between RET and AC Neutral.5. Ensure there are 120 V across an open connection.Real-time dataOnce various INCOM and DNP devices are connected, all of the various data will be displayed under the Real-Time Datalink at the bottom of the web Home Page (see Figure 7).Figure 7 . Real-time dataAll connected devices are viable in this location. The devices currently supported are:●●MPCV Relay and ARMS ●●Digitrip●●Analog and digital input readingsPossible troubleshootingIf no data is viewable, verify that all devices are connected correctly per INCOM and RS-485 standards.ConfigurationConfiguration filesThis page allows the user to back up the current NPServe configuration to a downloadable file. This file may later be reimported into an NPServe to apply the exported configuration:●●If an NPServe must be reset to factory defaults, importing this file will bring it back to the prior configuration.●●The configuration may be imported into another NPServe.4NPServe Users GuideUsers GUide MN024002EN February 2017Operation1. By default, leave all checkboxes checked. Only duringcertain custom procedures should the user pick and choose which files to export.2. Press “Create Configuration Archive” to beginthe export process. The web page will create a downloadable link.3. Click the downloadable link to save the file.Save configurationThis is a minimal file upload to import a configurationexported by NPServe.Figure 8 . Save configurationDevices and IONPServe can autolearn INCOM devices connected to it.The user can supply an address range to minimize autolearn time, if the addresses are known a priori:●●First Address – Autolearn scan starts at this address and should be less than or equal to lowest address on network.●●Last Address – Autolearn scans up to and including this address and should be greater than or equal to highest address on network.Possible T roubleshooting1. If no INCOM devices are found, please make sure theyare properly connected.2. Please refer to TD 17513 for wiring specifications.Default relay state1. On startup, the NPServe can by default energize orleave idle the three output relays.2. The default state for each relay is toggled by the pulldown box:a. “No Default” – Relay is not energized on startup.b. “Force Closed” – Relay is energized on startup andcannot be changed by control.3. Press the “Commit” button to save the relay states toNPServe.DNP SCADAStatus●●Link Type – How NPServe hooks up to DNP Master; may be UDP or RS-485●●Link Status – Whether NPServe is responding to DNP requests●●Bytes Transmitted – How many bytes NPServe has sent to Master since bootup or communications reconfiguration●●Bytes Received – How many bytes NPServe has received since bootup or communications reconfigurationotee:N This is a raw count of bytes, not what NPServe hasdetermined to be valid DNP .●●Start Traffic Capture – Brings up a window showing the raw communications on the DNP port (UDP or RS-485)●●Stop Traffic Capture – Stops the traffic capture processCommunications1. Select the Communications tab on the SCADA (DNPSlave) web page to configure the communications Network interface. Network options include RS485 serial or DNP over Ethernet (TCP or UDP).2. Port 20000 is the default port for DNP3 communicationover Ethernet.3. NPSERVE supports a single SCADA master. Up tofour (4) backup master IPs are supported, but only one master may be active at a time.4. To change the network interface, click the radiobutton for the chosen interface, enter the requested parameters, and click the <Submit Changes> button.5. A built-in DNP sniffer provides traffic capture of theDNP interaction between NPSERVE and the DNPmaster. Click the <Start Traffic Capture> button to begin the capture and the <Stop Traffic Capture> button to stop. A new browser window will open and display the bytes transmitted and received from NPSERVE.5NPServe Users GuideUsers GUide MN024002EN February 20176. DNP is a very extensive protocol with multipleconformance levels and various data representations. Inconsistencies between what a SCADA Masterexpects and what a virtual DNP profile specifies lead to puzzling results in the control room. SCADA Masters are complex software themselves and getting access to the raw data may be incongruous. Raw traffic capture data is critical for Eaton engineers when diagnosing these issues.Virtual settings1. Upload Profile – Select a file provided by Eaton toconfigure the NPServe DNP Virtual configuration.2. Profile – Select which uploaded profile to use.3. Slave Address – Set the DNP Slave address of theNPServe.4. Master Address – Set the expected DNP Masteraddress.5. Submit Changes – Apply changes in this tab to theNPServe Configuration.Possible troubleshooting1. Ensure that the NPServe has a valid SCADAconfiguration.2. Ensure that Communications settings are set upcorrectly.3. If bytes are received, then Master is not reaching theNPServe.4. If bytes are received but not transmitted, NPServe isrejecting requests from the Master, possibly due to mismatched DNP addresses.5. Traffic capture can provide insights into some issues;please initiate to find more low level information.Diagnostics1. Download a diagnostic file to submit to Eaton forfurther troubleshooting.2. Display INCOM Comm Statistics:●●Displays low-level INCOM communications statistics. Most counters are intended for Eaton troubleshooting but the following are end user interpretable:●●BCH Errors – Counts the number of corrupted datamessages due to bad wiring, mismatched addresses or other INCOM issues●●The second table is a per device statistics table. Non-zero values for any statistic indicate possible problems with the specific device or wiring.SystemThis page is used to verify the firmware version and to upload necessary firmware updates as necessary.otee:N NPServe can be reset to factory default status ifdesired. It is recommend to save the configuration before resetting.USB maintenance portThe USB Maintenance port provides access to a graphical maintenance web page via a USB-to-Ethernet connection.Required components●●Ethernet Cable●●Recommended connector – Plugable USB 2.0 OTG Micro-B to 10/100 Fast Ethernet Adapter for Windows Tablets & Raspberry Pi Zero (ASIX AX88772A chipset)●●Host PC or LaptopAccessing the maintenance web page1. If using a laptop, disable the wireless Ethernetfunctionality.2. Connect one end of the Ethernet cable to the plugableadapter.3. Connect the other end of the Ethernet cable to the hostPC.4. Plug the MicroUSB end of the adapter into theNPServe MicroUSB port.5. Open a web browser and go to the following URL:http://eaton.console.Y ou should now be at the maintenance page.T roubleshooting the access procedure1. Make sure the wireless is disabled.2. Try to browse to http://10.42.83.1 instead of http://eaton.console.3. Make sure your IP address is similar to 10.42.83.100(last number can vary).4. Try rebooting the Host PC.6NPServe Users GuideUsers GUide MN024002EN February 2017Changing the NPServe IPIMPORTANTWhen configuring the NPServe network configuration, the Ethernet port on the NPServe must be connected to a live device (for example, a switch). If the web page indicates “No Ethernet Carrier”, then you do not have a working Ethernet connection.1. Populate the “Maintenance IP Configuration” fields asper your network specification. 2. Click “Commit” and the present setting will update toreflect your input.T est modeTest mode turns off the normal functionality of the NPServe and gives access to low-level functions:●●Reboot – Reboots the NPServe●●Reset to Factory Defaults – Clearing the configuration from this page will do a low-level format of the datastorage and will clear network settings, etc. This normally is not necessary and a clearing configuration from the Ethernet interface is recommended.7NPServe Users GuideUsers GUide MN024002EN February 2017his page is intentionally left blank.TEaton1000 Eaton Boulevard Cleveland, OH 44122 United States © 2017 EatonAll Rights ReservedPrinted in USAPublication No. MN024002EN February 2017Eaton is a registered trademark.All trademarks are propertyof their respective owners.For Eaton product informationvisit: 。
ucos-ii_api_参考手册.doc
UCOS-II API 参考手册本章提供了μC/OS-Ⅱ的用户指南。
每一个用户可以调用的内核函数都按字母顺序加以说明,包括:●函数的功能描述●函数原型●函数名称及源代码●函数使用到的常量●函数参数●函数返回值●特殊说明和注意点OSInit( )Void OSInit(void);OSinit()初始化μC/OS-Ⅱ,对这个函数的调用必须在调用OSStart()函数之前,而OSStart ()函数真正开始运行多任务。
参数无返回值无注意/警告必须先于OSStart()函数的调用范例:void main (void){.OSInit(); /* 初始化 uC/OS-II */.OSStart(); /*启动多任务内核 */}μC/OS-II:实时操作系统内核OSIntEnter( )Void OSIntEnter(void);OSIntEnter()通知μC/OS-Ⅱ一个中断处理函数正在执行,这有助于μC/OS-Ⅱ掌握中断嵌套的情况。
OSIntEnter()函数通常和OSIntExit()函数联合使用。
参数无返回值无注意/警告在任务级不能调用该函数。
如果系统使用的处理器能够执行自动的独立执行读取-修改-写入的操作,那么就可以直接递增中断嵌套层数(OSIntNesting),这样可以避免调用函数所带来的额外的开销。
范例一:(Intel 80x86的实模式, 在大模式下编译,,real mode,large model)ISRx PROC FARPUSHA ; 保存中断现场PUSH ESPUSH DS;MOV AX, DGROUP ; 读入数据段MOV DS, AX;CALL FAR PTR _OSIntEnter ; 通知内核进入中断..POP DS ; 恢复中断现场POP ESPOPAIRET ; 中断返回ISRx ENDP范例二:(Intel 80x86的实模式, 在大模式下编译,, real mode , large model)参考手册ISRx PROC FARPUSHA ; 保存中断现场PUSH ESPUSH DS;MOV AX, DGROUP ; 读入数据段MOV DS, AX;INC BYTE PTR _OSIntNesting ; 通知内核进入中断...POP DS ; 恢复中断现场POP ESPOPAIRET ; 中断返回ISRx ENDPμC/OS-II:实时操作系统内核OSIntExit( )Void OSIntExit(void);OSIntExit()通知μC/OS-Ⅱ一个中断服务已执行完毕,这有助于μC/OS-Ⅱ掌握中断嵌套的情况。
ICP DAS GPS-721-MRTU GPS接收器快速入门指南说明书
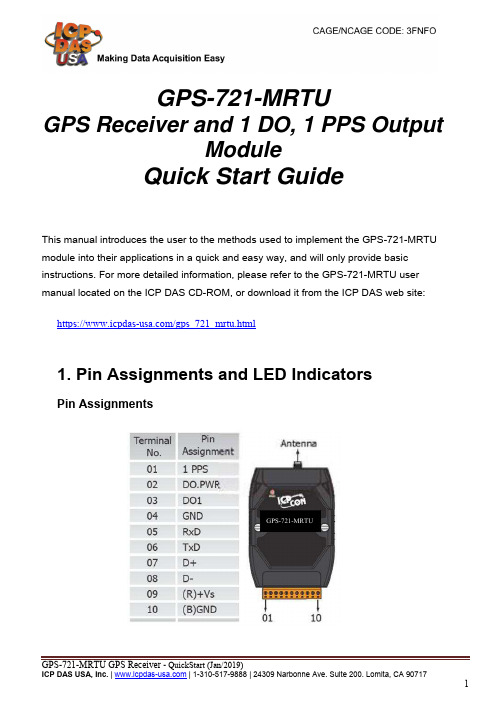
GPS-721-MRTUGPS Receiver and 1 DO, 1 PPS OutputModuleQuick Start GuideThis manual introduces the user to the methods used to implement the GPS-721-MRTU module into their applications in a quick and easy way, and will only provide basic instructions. For more detailed information, please refer to the GPS-721-MRTU user manual located on the ICP DAS CD-ROM, or download it from the ICP DAS web site:https:///gps_721_mrtu.html1. Pin Assignments and LED IndicatorsPin AssignmentsLED Indicators2. Operation ModesThe back panel of the GPS-721-MRTU contains the frame groundand the INIT/Normal Switch. Themodule has two operation modes(INIT and Normal modes), whichcan be determined via the switchmechanism on the chassis. Thedescription and figure are asfollows.3. Wiring Digital Output WiringPPS WiringMountingThe GPS-721-MRTU can be mounted on either a DIN-Rail or a wall, or it can be piggybacked to other modules using the bottom of the chassis.DIN-Rail MountingThe GPS-721-MRTU includes simple rail clips that allow for for reliable mounting on a standard 35 mm DIN rail.Three new DIN-Rail models are available, and each is made of stainless steel, which is stronger than those made of aluminum. There is a screw at one end, and a ring terminal is included so that it can be easilyconnected to the earth ground.Note: It is recommended that a 16 – 14 AWG wire is used to connect the DIN rail to the earth ground.Piggyback MountingThe GPS-721-MRTU has two holes on either side of the module to enable piggyback mounting. Refer to the figure below for an illustration of how to piggyback the modules.4. Using the ModuleThis section describes the installation of the GPS-721-MRTU, and provides details of how to begin using the module.1. Refer to Section 1 for details of the pin assignments.2. Connect the module to the RS-485 network using the DATA+ and DATA-pins. See Section 1 for details of the pin assignments. If the Host is only equipped with an RS-232 interface, then an RS-232 to RS-485 converter will be required. The GPS-721-MRTU supports RS-232 connections.Refer to the “I-7000 Bus Converter User Manual” for more information.Configure the module by sending the %AANNTTCCFF command. See Section 2.1 of the “GPS-721-MRTU User Manual” for details.ICP DAS provides two free tools that allow the GPS-721-MRTU to beeasily configured, the DCON Utility and the Send232 application, both of which can be downloaded from/pub/cd/8000cd/napdos/driver/dcon_utility/3. All module functions can be implemented using the DCON commandsdescribed in Section 2.4. If the Host is a PC with a Windows operating system installed, the DCONUtility can be used to allow easy configuration and reading of data. The DCON Utility can be downloaded from the ICP DAS website(), and documentation for the DCON Utility can be found in the ”Getting Started For I-7000 Series Modules” manual.Note 1: The DCON Utility is provided to enable commands to be sent to the GPS-721-MRTU. The graphic settings of the GPS-721-MRTU arenot supported by the DCON Utility.Note 2: If GPS-721-MRTU is unable to receive a GPS signal, check the position of the antenna and if the problem persists, try relocating theGPS antenna outside.。
挖伦电子警报系统产品说明文件说明书
Page 1©2002 Whelen Engineering Company Inc.Form No.13724C (040910)For warranty information regarding this product, visit /warranty•Proper installation of this product requires the installer to have a good understanding of automotive electronics, systems and procedures.•Whelen Engineering requires the use of waterproof butt splices and/or connectors if that connector could be exposed to moisture.•Any holes, either created or utilized by this product, should be made both air- and watertight using a sealant recommended by your vehicle manufacturer.•Failure to use specified installation parts and/or hardware will void the product warranty.•If mounting this product requires drilling holes, the installer MUST be sure that no vehicle components or other vital parts could be damaged by the drilling process. Check both sides of the mounting surface before drilling begins. Also de-burr the holes and remove any metal shards or remnants. Install grommets into all wire passage holes.•If this manual states that this product may be mounted with suction cups, magnets, tape or Velcro®, clean the mounting surface with a 50/50 mix of isopropyl alcohol and water and dry thoroughly.•Do not install this product or route any wires in the deployment area of your air bag. Equipment mounted or located in the air bag deployment area will damage or reduce the effectiveness of the air bag, or become a projectile that could cause serious personal injury or death. Refer to your vehicle owner’s manual for the air bag deployment area. The User/Installer assumes full responsibility to determine proper mounting location, based on providing ultimate safety to all passengers inside the vehicle.•For this product to operate at optimum efficiency, a good electrical connection to chassis ground must be made. The recommendedprocedure requires the product ground wire to be connected directly to the NEGATIVE (-) battery post (this does not include products that use cigar power cords).•If this product uses a remote device for activation or control, make sure that this device is located in an area that allows both the vehicle and the device to be operated safely in any driving condition.•Do not attempt to activate or control this device in a hazardous driving situation.•This product contains either strobe light(s), halogen light(s), high-intensity LEDs or a combination of these lights. Do not stare directly into these lights. Momentary blindness and/or eye damage could result.•Use only soap and water to clean the outer lens. Use of other chemicals could result in premature lens cracking (crazing) and discoloration. Lenses in this condition have significantly reduced effectiveness and should be replaced immediately. Inspect and operate this product regularly to confirm its proper operation and mounting condition. Do not use a pressure washer to clean this product.•It is recommended that these instructions be stored in a safe place and referred to when performing maintenance and/or reinstallation of this product.•FAILURE TO FOLLOW THESE SAFETY PRECAUTIONS AND INSTRUCTIONS COULD RESULT IN DAMAGE TO THE PRODUCT OR VEHICLE AND/OR SERIOUS INJURY TO YOU AND YOUR PASSENGERS!A u t o m o t i v e : Warnings to InstallersWhelen’s emergency vehicle warning devices must be properly mounted and wired in order to be effective and safe. Read and follow all of Whelen’s written instructions when installing or using this device. Emergency vehicles are often operated under high speed stressful conditions which must be accounted for when installing all emergency warning devices. Controls should be placed within convenient reach of the operator so that they can operate the system without taking their eyes off the roadway. Emergency warning devices can require high electrical voltages and/or currents. Properly protect and use caution around live electrical connections.Grounding or shorting of electrical connections can cause high current arcing, which can cause personal injury and/or vehicle damage, including fire. Many electronic devices used in emergency vehicles can create or be affected by electromagnetic interference. Therefore, after installation of any electronic device it is necessary to test all electronic equipment simultaneously to insure that they operate free of interference from other components within the vehicle. Never power emergency warning equipment from the same circuit or share the same grounding circuit with radio communication equipment. All devices should be mounted in accordance with the manufacturer’s instructions and securely fastened to vehicle elements of sufficient strength to withstand the forces applied to the device. Driver and/or passenger air bags (SRS) will affect the way equipment should be mounted. This device should be mounted by permanent installation and within the zones specified by the vehicle manufacturer, if any. Any device mounted in the deployment area of an air bag will damage or reduce the effectiveness of the air bag and may damage or dislodge the device. Installer must be sure that this device, its mounting hardware and electrical supply wiring does not interfere with the air bag or the SRS wiring or sensors. Mounting the unit inside the vehicle by a method other than permanent installation is not recommended as unit may become dislodged during swerving; sudden braking or collision. Failure to follow instructions can result in personal injury. Whelen assumes no liability for any loss resulting from the use of this warning device. PROPER INSTALLATION COMBINED WITH OPERATOR TRAINING IN THE PROPER USE OF EMERGENCY WARNING DEVICES IS ESSENTIAL TO INSURE THE SAFETY OF EMERGENCY PERSONNEL AND THE PUBLIC.Warnings to UsersWhelen’s emergency vehicle warning devices are intended to alert other operators and pedestrians to the presence and operation of emergency vehicles and personnel. However, the use of this or any other Whelen emergency warning device does not guarantee that you will have the right-of-way or that other drivers and pedestrians will properly heed an emergency warning signal. Never assume you have the right-of-way. It is your responsibility to proceed safely before entering an intersection, driving against traffic, responding at a high rate of speed, or walking on or around traffic lanes. Emergency vehicle warning devices should be tested on a daily basis to ensure that they operate properly. When in actual use, the operator must ensure that both visual and audible warnings are not blocked by vehicle components (i.e.: open trunks or compartment doors), people, vehicles, or other obstructions. It is the user’s responsibility to understand and obey all laws regarding emergency warning devices. The user should be familiar with all applicable laws and regulations prior to the use of any emergency vehicle warning device. Whelen’s audible warning devices are designed to project sound in a forward direction away from the vehicle occupants. However, because sustained periodic exposure to loud sounds can cause hearing loss, all audible warning devices should be installed and operated in accordance with the standards established by the National Fire Protection Association.Safety FirstThis document provides all the necessary information to allow your Whelen product to be properly and safely installed. Before beginning the installation and/or operation of your new product, the installation technician and operator must read this manual completely. Important information is contained herein that could prevent serious injury or damage.WARNING: This product can expose you to chemicals including Methylene Chloride which is known to the State of California to cause cancer, and Bisphenol A, which is known to the State of California to cause birth defects or other reproductive harm. For more information go to .Installation Guide:TA1252L, TA1652L & TA1652HTraffic Advisor™ Systems51 Winthrop RoadChester, Connecticut 06412-0684Phone: (860) 526-9504Internet: Salese-mail:*******************CustomerServicee-mail:*******************®ENGINEERING COMPANY INC.Installation: Array Install the T/A arrow light array as shown in Figures 1-3depending on which mounting style you will use.IMPORTANT: When you are routing any wires, theexisting, factory wire harness should be followedwhenever possible. The existing harness has beencarefully positioned so that the wires could not bedamaged by vehicle operation for example; if yourvehicle is equipped with a dump body, the harness ispositioned so that the dumping action will not crushor pinch the wires. The factory harness may,depending on vehicle design, include a service loopthat will keep the wires from being damaged orbroken by the movement of the dump body.Wiring:WARNING!All customer supplied wires that connectto the positive terminal of the battery must be sizedto supply at least 125% of the maximum operatingcurrent and FUSED at the battery to carry that load.DO NOT USE CIRCUIT BREAKERS WITH THISPRODUCT!Power Connector / P11.Plug the power connector into the back of the control headas shown in the wiring diagram.Splice the 2 RED wires together, then extend this single REDwire to the battery. Install a 30 amp fuse block (customersupplied) to the end of the wire (remove the fuse beforeconnecting any wires to the battery) and connect it to thePOSITIVE (+) terminal on the battery.IMPORTANT: There must not be more than 2 feet ofwire between the fuse block and the battery. The wirebetween the fuse and battery is “unprotected”, don’tallow this wire to come in contact with other wires.2.Splice the 2 BLACK wires together, then extend this singleBLACK wire to the battery and connect it to the batteryground. If your vehicle has a cable extending from thenegative terminal of the battery to the chassis, it is best toattach the black wire at the chassis connection.Control Connectors / P2 & P31.Route the control cables from the TA to the control head.2.Plug the connector(s) into the control head as shown.3.Refer to the control head manual for operation.The installation of your system will be complete after the fuseblock wire is connected to the POSITIVE (+) terminal of thebattery. After this connection has been made, inspect the fusesat the control head and at the battery. If either of these fuses areblown, carefully inspect all of the circuit wires and make surethey are wired correctly. Replace blown fuses with one of anidentical amp rating. If these fuses blow after installation oractivation, contact Whelen Engineering Technical Support.Page 2Page 3Page 4122211661722013121415312329221221141315311251089113072524292827171819202122232425263031151688111181111112112881111811111121128811111111112112022220111202112021222222112222122222222222222201112021120122222211120211202122222211221222222111222222222111111111121121111111111211111111111121121111222222111202021120122222211120202112021222222111222222111222222222211120202112012222221202122111222222122111122120122122W I N G U P .L E F T /L O W .R .14.062"B L K 12V A M B L E D W I N G U P .R T .-L O W .L E F T 14.062"B L K 12V A M B L E D S E A L W I R E 9P O S U N I V E R S A L M A T E -N -L O K -S C R E W 1/4-20X 1/2"S O C K T S E T C U P P O I N T S S -W I N G U P .L F T /L O W E R R T 14.062"B L K 24V A M B H A L O 500L E D S T E A D Y M A X A M B E R 2P O S C A S T I N G B A S E B L A C K S T A N D A R D -H O U S I N G -B L A C K L A B E L -M O D E L -P A R T &S E R I A L #/n o t s h o w n L A B E L M A D E I N U S A F L A G -/n o t s h o w n F I L L E R P A N E L 02-0363392-1211-463399-00109-1322911-0010-0522842-**10-0320776-0011-382096-00202-0383558A A 4P L U G -K E Y I N G U N I V E R S A L M A T E -N -L O KS E A L -I N T E R F A C E 9P O S U M N L 1/8"A L L E N W R E N C H H O U S I N G P L U G ,3X 3P O S U M N L -H O U S I N G 9P O S P I N A M P -C A B L E C L A M P C A S T I N G B A S E B L A C K E N D T A P P E D -39-1V 17270-0139-0409313-0439-*******-0914-130526-08026-0121053-0421-********-011-382096-003G R O M M E T 39-1V 17144-0239-1V 17270-0002-0363392-F 202-0363391-F 266T 05164351023233D E S C R I P T I O N P A R T N U M B E R I T E M123456789101112Q T Y W I N G U P .R I G H T /L O W .L E F T 8.687"B L K 12V A M B L E D 02-0363391-F 11112221111111112221112282111111111882282111882282111111118822821121288221122T A A R R O W 12L I G H T A M B 12V D C 51'C A B L E E N D M T 01-06836122A 1T A A R R O W 12L I G H T A M B 12V D C 26'C A B L E E N D M T T A A R R O W 12L I G H T A M B 12V D C 51'C A B L E S T D M T T A A R R O W 12L I G H T A M B 12V D C 26'C A B L E S T D M T 01-06836122A 001-06836120A 101-06836120A 0T A A R R O W 16L I G H T A M B L E D 51'C A B L E E N D M T T A A R R O W 16L I G H T A M B L E D 51'C A B L E S T D M T T A A R R O W 16L I G H T A M B L E D 26'C A B L E E N D M T T A A R R O W 16L I G H T A M B L E D 26'C A B L E S T D M T T A A R R O W 16L I G H T A M B 24V D C 26'C A B L E S T D M T T A A R R O W 16L I G H T A M B 24V D C 26'C A B L E E N D M T T A A R R O W 16L I G H T A M B 24V D C 51'C A B L E S T D M T T A A R R O W 16L I G H T A M B 24V D C 51'C A B L E E N D M T T A A R R O W 16L I G H T A M B 12V D C 51'C A B L E E N D M T T A A R R O W 16L I G H T A M B 12V D C 51'C A B L E S T D M T T A A R R O W 16L I G H T A M B 12V D C 26'C A B L E E N D M T T A A R R O W 16L I G H T A M B 12V D C 26'C A B L E S T D M T W I N G U P .R I G H T /L O W .L E F T 8.687"B L K 12V A M B H A L O H A L O G E N S N A P -I N 2W I R E 2P O S 28V -35W A M B .H A L O G E N S N A P -I N 2W I R E 2P O S 12V -20W A M B .T A A R R O W 12L I G H T A M B L E D 26'C A B L E S T D M T T A A R R O W 12L I G H T A M B L E D 26'C A B L E E N D M T T A A R R O W 12L I G H T A M B L E D 51'C A B L E S T D M T T A A R R O W 12L I G H T A M B L E D 51'C A B L E E N D M T 01-06836121F 001-068361211001-068361231001-06836123A 101-06836121A 101-06836123A 001-06836121A 001-06836120F 001-06836122F 001-06836120F 101-06836122F 101-068361211101-0683612311I N P U T C A B L E -51'I N P U T C A B L E -26'W A T E R R E S I S T A N T T /A H A R N E S S M O U N T I N G S T A N D A R D K I T M O U N T I N G A R R O W E N D M O U N T K I T 01-06836123F 101-06836123F 001-0416047-0001-0416050-0001-06836121F 101-06835777A 202-0363391-A 146-0764562-5146-0764562-2601-06835777A 446-0786468-002222222222222222W I N G U P .R I G H T /L O W .L E F T 14.062"B L K 12V A M B H A L O W I N G U P .L E F T /L O W .R I G H T 8.687"B L K 12V A M B H A L OW I N G U P .R I G H T /L O W .L E F T 14.062"B L K 24V A M B H A L O 02-0363392-A 102-0363391-1202-0363391-A 2131422222222W I N G U P .L E F T /L O W .R T .14.062"B L K 12V A M B H A L O W I N G U P .L E F T /L O W .R T .8.687"B L K 12V A M B L E D02-0363392-F 102-0363392-A 23498301110Q T Y Q T Y Q T Y Q T Y Q T Y Q T Y Q T Y Q T Y Q T Y Q T Y Q T Y Q T Y Q T Y Q T Y Q T Y Q T Y Q T Y Q T Y Q T Y (C O N T I N U E D B E L O W )C A B L E L E N G T H 0=1=26'51'V O L T A G E /C O L O R /S T Y L E A =1=F =12V A M B E R H A L O G E N 24V A M B E R H A L O G E N 12V A M B E R L .E .D .M O U N T I N G &A R R O W S I Z E 0=1=2=3=S T A N D A R D M O U N T 12L I G H T S T A N D A R D M O U N T 16L I G H T E N D M O U N T 12L I G H T E N D M O U N T 16L I G H TP A R T N U M B E R E X A M P L E :01-0683612-___C A B L E L E N G T H V O L T A G E -C O L O R -S T Y L E M O U N T I N G -A R R O W S I Z E。
Binary B-220-HDSPLTR-1X4HDMI 1X4 Splitter 使用说明书
B-220-HDSPLTR-1X4IMPORTANT SAFETY INSTRUCTIONSWELCOME TO BINARY™CONTENTSFEATURES1. Read and follow all instructions and warnings in this manual. Keep for futurereference.2. Do not use this apparatus near water.3. Clean only with a dry cloth.4. Do not block any ventilation openings. Install according to manufacturer’sinstructions.5. Do not install near any heat sources such as radiators, heat registers, stovesor other apparatus (including amplifiers) that produce heat.6. Do not override the safety purpose of the polarized or grounding-type plug.A polarized plug has two blades - one wider than the other. If the provided plug does not fit into your outlet, consult an electrician for replacement of the obsolete outlet.7. Protect the power cord from being walked on or pinched particularly at plug,convenience receptacles, and the point where it exits from the apparatus.8. Only use attachments/accessories specified by the manufacturer.9. Unplug this apparatus during lightning storms or when unused for long periodsof time.10. Refer all servicing to qualified service personnel. Servicing is required whenthe apparatus has been damaged in any way, such as when the power-supply cord or plug is damaged, liquid has been spilled or objects have fallen into the apparatus, the apparatus has been exposed to rain or moisture, does not operate normally, or has been dropped.11. Do not expose this equipment to dripping or splashing and ensure that noobjects filled with liquids, such as vases, are placed on the equipment.12. To completely disconnect this equipment from the AC mains, disconnect thepower supply cord plug from the AC receptacle• Distributes a single HDMI signal to 4 identical and synchronized HDMI outputs • Configurable EDID Settings• Supports 7.1 channel surround sound, DTS-HD Master Audio and TrueHD high bit rate audio• 6.75 Gpbs Bandwidth• Full HD with 36 bit Deep Color • HDCP compliantThis product is designed to provide years of exceptional reliability. Binary™ is one of the most highly-regarded Media Distribution brands available today and westand committed to providing our customers with the highest degree of quality and service in the industry.(1) HDMI Splitter, 1x4(1) 5VDC power adapter (2) Mounting Ears (4) Rubber Feet (1) Owner’s ManualPg. 2Pg. 3EDID CONFIGURATIONINSTALLATIONCONNECTIONSAuto - Reads the EDID from each of the connected displays .This setting uses the lowest common denominator for video resolution and audio format to create and apply a new EDID to all inputs.First Output - Reads the EDID from the display connected to output 1.Embedded 1 -6 - 6 representative EDIDs that can be assigned to Inputs. See Dipswitch Settings (Page 6) for for details.1. Connect the HDMI cable from the source to the B-220-HDSPLTR.2. Connect the HDMI cable from the B-220-HDSPLTR to the displays.4. Turn on the source and the devices.1. Power LED2. Input LED3. Output LEDs1. HDMI Input2. HDMI Outputs3. EDID Dipswitches4. Power Supply (+5V DC)© 2012 Binary™Pg. 4Pg. 5FRONT PANELPg. 6Pg. 7B-220-HDSPLTR-1x4 Owner’s Manual B-220-HDSPLTR-1x4 Owner’s ManualSPECIFICATIONSDIPSWITCH SETTINGSVideo SupportVESA: 640x480, 800x600, 1024x768, 1280x1024, 1600x1200, 1920x1200HDTV: 480i, 576i, 480p, 576p, 720p, 1080i, 1080p Video Bandwidth6.75 GbpsVideo Transmission Full 1080p HD with 36 bit Deep Color Audio SupportSurround Sound (up to 7.1ch) DTS-HD Master Audio and TrueHD high bitrate audio ESD ProtectionHuman Body (air gap): 15kV Human Body (contact): 8kV HDMI Connector TypeType A (19 pin female)Power Supply 5V DC, 1A Power Consumption3.5 Watts (max)Dimensions 6.24” W x 1.01” H x 3.2” D Weight1.88lbs (0.86kg)Certifications & CompliancePower Supply: CE, FCC, UL, Rohs Product: CE, FCC, RohsPg. 8WARRANTYCONTACTING TECHNICAL SUPPORT2-Year Limited WarrantyThis Binary™ Product has a 2 Year Limited Warranty. This warranty includes parts and labor repairs on all components found to be defective in material or workmanship under normal conditions of use. This warranty shall not apply to products which have been abused, modified or disassembled. Products to be repaired under this warranty must be returned to SnapAV or a designated service center with prior notification and an assignment return authorization number (RA).Phone: (866) 838-5052Email:**********************120731-0910。
CEIBA2软件使用手册_新版本(中文)
CEIBA2软件使⽤⼿册_新版本(中⽂)1 软件介绍CeiBa II主要包含了实时预览、多车监控,服务器和本地视频回放、剪辑,下载,证据管理、⾃动下载、基础数据管理、报警中⼼等功能2 安装与卸载电脑配置要求操作系统:Windows7 SP1、Windows8CPU: Intel i3-3220及以上内存:2G及以上分辨率:1280*760浏览器:建议IE10及以上其它:安装flash player2.1 软件安装1、双击安装包⽂件,弹出如下对话框,点击下⼀步即可。
注:如果之前安装了CEIBA2,会弹出卸载提⽰,如下图点击“是”按钮,开始卸载之前版本的CEIBA2,卸载完成后弹出完成提⽰,如下图。
点击确定按钮,进⾏2.1.2的操作。
2、选择安装路径,如下图,安装路径可⼿动更改,尽量选择磁盘剩余空间较⼤的盘符,点击下⼀步按钮进⾏下⼀步操作。
3、选择开始菜单⽂件夹,如下图,⽂件夹可⼿动更改,点击下⼀步进⾏下⼀步操作。
4、选择附加任务,如下图,选择是否创建桌⾯快捷⽅式,点击下⼀步按钮进⾏下⼀步操作。
5、安装准备完毕,如下图,确认安装信息后,点击安装按钮进⾏软件安装6、正在安装7、安装完成,如下图,选择是否运⾏CEIBA2,点击结束按钮即可2.2 软件卸载1、点击开始菜单找到CEIBA2⽂件夹,点击该⽂件夹下的“卸载CEIBA2”,弹出如下对话框,点击“是”按钮继续卸载即可。
2、卸载完成后,会提⽰是否删除⽤户配置信息。
⽤户配置信息主要是保存⽤户登录信息和⼀些下载任务注:如果卸载的同时,有Ceiba正在运⾏,会提⽰3服务器登录服务器登录可以使⽤的功能:实时监控、服务器回放、硬盘回放、远程设备回放、⽬录回放、证据中⼼、基础数据管理、⾃动下载、系统设置3.1登录3.1.1服务器登录1、双击CB2程序,弹出如下登录对话框。
2、类型选择”服务器“3、输⼊服务器IP地址(同时⽀持域名)或选择已添加的服务器名称注意:服务器默认端⼝为7264,如在部署服务器修改了默认端⼝,IP后需要加新端⼝4、输⼊正确的⽤户名、密码5、按 Enter键或点击登录按钮,进⼊到实时预览页⾯6、输⼊错误的服务器IP、⽤户名、密码登录时,会提⽰登录失败。
海宝操作手册
我们的产品完全使用微软的 C++和 MFC 设计。 图形向导 可以显示代码的实际图形以及代码所需要的参数。该向导使代码编辑更简单、直观。 示教/跟踪 如果配置了光电跟踪探头,你能够用控制器把几乎所有的图形都转换成图形代码,并存入 硬盘,最后再使用图形向导修改代码。 图形库 只需简单的从图形库里选择所需图形,输入相关尺寸即可完成零件生成。参数输入 错误时会有相关的错误提示。 程序上传和下载
随着精细等离子和激光技术被引入图形切割领域,越来越需要能够精确定位的控制 器。SoftMotion(软件运动控制)把英特尔处理器的强大功能和运算精度用于定 位工作台。使用数字位置环和速度环工作,可以在整个速度范围内平滑的运动,准 确的将切割设备定位到规定的位置,甚至可以在切割时随意缩放零件。
该控制器可以用于几乎所有的二维切割台。内置了等离子、火焰、标记、激光、高 压水切割逻辑。不管何种使用情况,我们都将使你的图形切割过程产量更高。
波特率达到 115K。如果使用控制器附带的 Link 通信软件,可以获得高达 230K 的波特率。
能够通过网卡连接到 PC 局域网,上传或下载零件代码。 图形化程序显示 图形化显示任何零件代码。
显示时时位置和 I/O 信息。
显示实际切割路径。 内建参数化图形库 提供 68 种通用图形,选中某个图形后可以根据提示输入相应的尺寸参数。 示教/跟踪 圆滑弧和圆滑直线算法可以优化程序尺寸,增加轮廓平滑度。把现存的光电跟踪模 板转化成 EIA RS-274D 程序代码,并存储在内部硬盘上。 自动零件闭合检测。
SGPS-UMN-BM02_用户手册_供用电合同管理
【秘密】<营销业务应用>供用电合同管理用户手册<电力事业部>文件编号:EP-PIQM文件版次:QMS2005文档编号版本号分册名称第册/共册总页数正文附录目录第1章用户手册的内容 (1)第2章供用电合同功能介绍 (1)§2.1合同范本管理功能介绍 (1)§2.1.1................................. 合同范本编辑功能介绍 1§2.1.2................................. 合同范本引用功能介绍 2§2.1.3................................. 合同范本查询功能介绍 6§2.2合同新签功能介绍. (7)§2.2.1.......................................... 总体功能介绍 7§2.2.2............................................... 工作流程 7§2.2.3.......................................... 功能操作介绍 8§2.2.4............................................... 差异介绍 15§2.3合同续签功能介绍 (16)§2.3.1.......................................... 总体功能介绍 16§2.3.2............................................... 工作流程 16§2.3.3.......................................... 功能操作介绍 16§2.4合同补签功能介绍 (17)§2.4.1.......................................... 总体功能介绍 17§2.4.2............................................... 工作流程 18§2.4.3.......................................... 功能操作介绍 18§2.5合同终止功能介绍 (18)§2.5.1.......................................... 总体功能介绍 18§2.5.2............................................... 工作流程 18§2.5.3.......................................... 功能操作介绍 18§2.6合同批量新签功能介绍.. (20)§2.6.1.......................................... 总体功能介绍 20§2.6.2............................................... 工作流程 20§2.6.3.......................................... 功能操作介绍 20§2.7合同批量终止功能介绍.. (24)§2.7.1.......................................... 总体功能介绍 24§2.7.2............................................... 工作流程 25§2.7.3.......................................... 功能操作介绍 25§2.8合同查询功能介绍 (25)§2.8.1............................................... 合同查询 25§2.8.2........................................ 合同有效期监测 26第1章用户手册的内容为了明确供用电合同管理的内容及合同签订工作所处的工作场景,为供用电合同软件需求规格说明书的编写提供依据,特制定此用户手册。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
文档编号:BSDEP-BSDEAPI-PUM001深证通信工程技术文档BSDEAPI用户手册文档编号:BSDEP-BSDEAPI-PUM001文档密级:对外发布编写:蒋春风审核:王宏研发中心2007年6月文档信息文档信息文档名称BSDEAPI用户手册说明所属项目银证数据交换平台修订历史日期版本修改人员修改说明20060604 0.9 蒋春风、王宏完成初稿。
20060620 0.9.1 王宏 适用于C语言的接口修改。
20060901 0.9.2 蒋春风 增加了MrReceive3和MrGetVersion接口函数。
20060927 0.9.3 蒋春风 对MrSend函数中的pMsgPropery成员m_szCorrPkgID的使用进行了约定,并增加了对日志的说明。
20061012 0.9.4 蒋春风 修改了对STUMsgProperty结构中成员m_szCorrPkgID的使用的约定;细化了各接收函数中超时参数iMillSecTimeo 的说明。
20061129 0.9.5 蒋春风 新增加了AIX版本的API,并且将mrapi.h 头文件中的注释改为C语言风格的注释。
20061215 0.9.6 蒋春风 第一版正式发布。
20070313 01.04.20070313蒋春风第二版正式发布,版本号为01.04.20070313,对于BSDEAPI修改了内部协议,并作了以下修改:1.对于浏览或接收消息中的m_szCorrPkgID的字段作为输入条件增加了<EMPTY>和<NOEMPTY>特殊处理的说明。
2.增加了函数错误返回值的定义。
3.MrGetVersion函数的结果,为了方便版本号的比较,格式由”20060901.01.04”修改为”01.04.20060901”.20070516 01.04.20070313 蒋春风 修改了关于AIX版本的说明;修改关于日志配置文件的说明;将示例程序中发送消息包的内容修改为标准的消息包格式。
文档编号:BSDEP-BSDEAPI-PUM00120070606 01.04.20070313 蒋春风 修改了关于AIX版本的说明;并增加了关于接口函数MrInit2的说明。
20070629 01.04.20070313 蒋春风 修改了关于AIX的HP-UX版本的说明;并增加了关于接口函数MrInit2的参数pOnRecvMsgPropery的说明。
目录目录1 引言 (1)2 安装及应用发布 (1)2.1 Windows平台 (1)2.2 AIX平台 (2)2.3 其他平台 (2)2.4 关于日志的说明 (3)3 使用概述 (4)3.1 功能 (4)3.2 应用环境 (4)3.3 地址的标识 (5)3.4 线程安全性 (5)4 编程参考 (6)4.1 常量定义 (6)4.1.1 协议类型常量 (6)4.1.2 消息标志位常量 (6)4.1.3 长度常量 (6)4.1.4 函数返回错误值 (6)4.2 数据结构说明 (7)4.2.1 消息属性STUMsgProperty (7)4.2.2 连接信息STUConnInfo (8)4.3 函数参考 (9)4.3.1 函数清单 (9)4.3.2 MrInit (10)4.3.3 MrInit2 (11)4.3.4 MrIsLinkOK (12)4.3.5 MrCreatePkgID (12)4.3.6 MrSend (13)4.3.7 MrReceive1 (14)4.3.8 MrReceive1_FreeBuf (16)4.3.9 MrBrowse (16)4.3.10 MrReceive2 (17)4.3.11 MrReceive3 (19)4.3.12 MrDestroy (21)4.3.13 MrGetVersion (21)目录4.3.14 调用顺序 (22)5 编程示例 (22)图索引图1 BSDEAPI应用环境 (4)图2 用户标识与应用标识 (5)图3 BSDEAPI主要函数调用顺序 (22)BSDEAPI用户手册1 引言本文是银证数据交换平台客户端应用程序开发接口BSDEAPI (Banking-Securities Data Exchange Application Programming Interface)的使用手册。
主要说明使用BSDEAPI进行开发的方法、各个API函数的功能、输入、输出等,以指导开发人员使用BSDEAPI。
本文的读者为使用BSDEAPI的开发人员、测试人员、维护人员等。
其他术语英文缩写:BSDEP:Banking-Securities Data Exchange Platform,银证数据交换平台。
BSSH:BSDEP Switching Hub,银证数据交换平台的交换中枢。
BSSU:BSDEP Switching Unit,银证数据交换平台交换单元,BSSH的构成元素。
BSAP:BSDEP Access Point,银证数据交换平台的接入客户端。
BSMR:Banking-Securities Message Router,银证消息路由器,BSAP的构成元素。
BSIX:Banking-Securities Information eXchange protocol,银证信息交换协议。
BSPG:Banking-Securities Protocol Gateway,银证协议转换网关。
2 安装及应用发布2.1 Windows平台BSDEAPI目前支持Windows 2000/XP/2003操作系统。
Windows平台的BSDEAPI由以下几个文件组成:文件名 说明mrapi.h 开发用头文件。
mrapi.lib 开发用链接输入库,注意不是静态库。
mrapi.dll BSDEAPI动态链接库,用BSDEAPI开发的应用运行时用到。
ACE.dll BSDEAPI应用用到的另一个动态链接库。
mrapi_log.conf 日志配置文件。
BSDEAPI用户手册使用BSDEAPI进行开发,建议将以上全部文件拷贝到用户的可执行文件同一个目录下;也可以将dll文件拷贝到适当的路径下,将其它文件拷贝到开发环境相应的路径下。
发布BSDEAPI应用时,请把mrapi.dll、ACE.dll和mrapi_log.conf一起发布。
2.2 AIX平台BSDEAPI目前支持AIX5.3(32位)、AIX5.3(64位)、AIX5.1(32位)操作系统。
AIX平台的BSDEAPI由以下几个文件组成:文件名 说明mrapi.h 开发用头文件。
libmrapi.so BSDEAPI动态链接库,用BSDEAPI开发的应用运行时用到。
libACE.a BSDEAPI运行时需要用到的一个库。
libz.a BSDEAPI运行时需要用到的一个库。
mrapi_log.conf 日志配置文件。
需要注意以下问题:(1)对于AIX5.3的64位版本,编译时需要在环境变量中配置OBJECT_MODE=64才能编译出64位版本的程序,否则默认编译出的是32位的版本;(2)库文件libmrapi.so、libACE.a和libz.a等库文件可以放到任意路径下,但需要在环境变量中增加LIBPATH变量指向该路径;(3)日志配置文件mrapi_log.conf可以在当前目录中,也可以在环境变量MRAPI_LOGCONF_PATH中指定;(4)例如,我的AIX机器的用户名下的.profile中增加了以下配置环境变量的语句:export OBJECT_MODE=64export LIBPATH=$LIBPATH:/pubuser/jiangcf/bsdep/taix/libapiexportMRAPI_LOGCONF_PATH=/pubuser/jiangcf/bsdep/taix/mrapi_log.conf(5)发布BSDEAPI应用时,请将以上的库文件一起发布。
2.3 其他平台BSDEAPI目前还支持HP-UX v11.11的32位和64位操作系统。
BSDEAPI用户手册BSDEAPI可根据用户环境要求进行定制,以支持其他平台上的开发和使用。
2.4 关于日志的说明BSDEAPI在使用过程中,可以产生运行日志并记入日志文件。
日志配置文件mrapi_log.conf可以控制BSDEAPI日志的产生和输出。
文件格式如下:Level=0Display=1LogDir=/pubuser/jiangcf/bsdep/taix/logLogName=mrapi.logMaxFileCount=20MaxFileSize=5000000(1)Level表示日志的级别,其取值范围是0至10,缺省值为0。
0级日志信息最少,只报告错误和重要的运行信息,这也是正式运行时设置的级别;10级日志信息最多,包括所有的错误、警告和信息,一般只在程序调试错误时使用。
其它常用的级别还有1和5,其信息量中等。
(2)Display表示日志输出的方式,其取值范围是0至3,缺省值为1。
0表示不显示也不记录日志;1表示只在文件中记录日志;2表示只在屏幕上显示日志(只对控制台程序时有效);3表示在文件中记录同时在屏幕上显示日志。
(3)LogDir表示日志文件的目录;(4)LogName表示日志文件名称的前缀;(5)MaxFileCount表示最大文件的数目,默认是20个。
假如LogName是mrapi.log,MaxFileCount是20,则日志文件文件名为mrapi.log、mrapi01.log、mrapi02.log、……、mrapi19.log。
其中mrapi.log是最新的日志文件,mrapi19.log是最旧的日志文件,更早的日志文件将自动被删除;(6)MaxFileSize表示其中一个日志文件的大小,默认是5000000,约5MB;在Windows环境下mrapi_log.conf需要和mrapi.dll放置在同一目录下;在AIX环境下按照解包后的层次结构放置。
如果配置文件不存在,或者里面少配置了某个参数,则相应参数采用缺省值。
该配置文件可以在使用BSDEAPI的程序运行过程中动态修改,修改后30秒内生效。
BSDEAPI 用户手册3 使用概述3.1 功能BSDEAPI 是一组可用于C/C++语言的应用程序编程接口,程序开发人员可以用它与银证数据交换平台进行数据交换。
BSDEAPI 可以完成通信的自动连接、发送消息包、接收消息包、加密压缩等功能,应用程序可以用BSDEAPI 与银证数据交换平台的接入客户端实现交互。
3.2 应用环境图1 BSDEAPI 应用环境在银证数据交换平台中,接入客户端负责向交换中枢认证用户的身份,也负责与交换中枢建立安全的SSL连接,可靠的传输数据。