RB试验措施课件
RB试验方案-

RB试验方案1.1 协调控制系统协调控制系统采用间接能量平衡方式,协调汽机、锅炉,使机组满足负荷需求,维持主汽压力在给定值,保证整个机组的安全、经济运行。
系统设计有RUNBACK功能,当机组辅机异常时,系统自动切换到安全运行方式。
协调控制系统设计有以下功能回路:a. 单元负荷指令处理回路、机前压力设定值处理回路、机组最大出力运算回路、参数越限迫升/降回路、闭锁增/减回路b. 运行方式及方式选择回路:系统有五种运行方式(基本方式、汽机跟随方式、锅炉跟随方式、炉跟机协调控制方式、机跟炉协调控制方式)。
c. 负荷RUNBACK回路:当下列任一条件存在时,将发生负荷RUNBACK请求。
此时系统系统工作在机跟随协调控制方式,维持机前压力,随着锅炉出力的降低将机组负荷降到辅机对应的出力水平。
1.1 RB试验内容负荷大于180MW,运行中一台引风机跳闸产生RB。
目标负荷160MW,减负荷速率为50MW/min; λ一台空预器运行中跳闸则跳同侧引风机,按引风机RB处理。
负荷大于180MW,运行中一台送风机跳闸产生RB。
目标负荷160MW,减负荷速率为50MW/min。
λ负荷大于180MW,运行中一台一次风机机跳闸产生RB。
目标负荷160MW,减负荷速率为50MW/min。
λ负荷大于180MW,运行中一台给水泵跳闸且备用泵没有联启,产生RB。
目标负荷150MW,减负荷速率为50MW/min。
λ负荷大于210MW,运行中一台磨跳闸余两台磨运行,产生RB。
目标负荷190MW,减负荷速率为40MW/min。
λ负荷大于160MW,运行中一台磨跳闸余一台磨运行,产生RB。
目标负荷135MW,减负荷速率为40MW/min。
λ注:各项RB的负荷目标值和减负荷速率待讨论后最终确定。
2 RB试验目的2.1当机组主要辅机故障跳闸造成机组实发功率受到限制时(协调控制系统在自动状态),为适应设备出力,协调控制系统强制将机组负荷减到尚在运行的辅机所能承受的负荷目标值。
RB 试验

3.2.3 RUNBACK 功能3.2.3.1 RB 动作条件与项目汽动给水泵 RB每台汽动给水泵出力按照200MW 计算,电动给水泵出力按照90MW 计算,当发生一台汽动给水泵跳闸且负荷大于200MW 时,触发RB 动作,RB 目标负荷180MW。
送/引风机/空预器RB每侧风烟系统出力按照200MW 计算,当发生一侧风烟系统跳闸(送风机/引风机/空预器跳闸)且负荷大于200MW 时,触发RB 信号,RB 目标负荷180MW。
一次风机 RB每台一次风机出力按照200MW 计算,当发生一台一次风机跳闸且负荷大于200MW时,触发RB 信号,RB 目标负荷180MW。
3.2.3.2 RB 动作后逻辑情况1) 当 RB 动作时;自动按照AB1-AB3-AB2-AB4(油枪)顺序间隔3 秒依次投入AB层燃油组和A 层少油点火装置(A 层少油点火运行人员可在操作画面,根据机组运行状态选择是否投入)。
当以上RB 动作时A 磨煤机和B 磨煤机均不在运行状态时,按照CD1-CD3-CD2-CD4(油枪)顺序间隔3 秒依次投入CD 层燃油组。
2) 当RB 动作,若机组运行磨煤机台数≥3 时直接跳闸E 磨煤机; E 磨煤机跳闸后8s(若RB 发生时,E 磨没有运行,则直接跳闸D 磨;一次风机RB 时延时2秒),当运行磨煤机台数≥3 时跳闸D 磨煤机;D 磨煤机跳闸后7s(若RB 发生时,若D 磨没有运行,则直接跳闸C 磨),当运行磨煤机台数≥3 时跳闸C 磨煤机;最终保持两台磨煤机处于运行状态。
3) RB 动作后协调方式切为机跟随滑压方式,滑压速率(0.3MPa/min)压力设定值依据RB 滑压曲线设定。
4) RB 发生后,减温水调门维持自动状态,超驰关闭30 秒。
5) 汽泵跳闸触发给水泵RB 时,电泵联启2 秒后,勺管从30%按照一定速率开至x%(x%为RB 前负荷对应的函数f(x))。
函数由调试期间根据实际情况整定。
RB试验措施PPT课件
5.2.2锅炉大联锁按纽不投
5.2.2.1 引风机跳闸 运行中如A侧引风机跳闸,且负荷大于
180MW,引风机RB动作。对应侧A送风机入 口动叶、A一次风机入口引叶应关为0。如A 送风机动叶未关到位(关节点未闭合), 延时120秒后跳A送风机;A一次风机导叶未 关到位(关节点未闭合),延时120秒后分 别跳A一次风机;若在120S的时间内关到位 (关节点闭合),A送风机、A一次风机不 跳闸。
试运指挥组及调度批准; 3.9 送、引、一次风挡板在满负荷工况下,
开度有一定裕量,不能超过70%。 3.10 送风自动调节品质得到改善,能在
50%~100%负荷范围内进行调节。 4 静态试验
条件:锅炉、汽机主控器在自动方式,机组 在自动方式。
强制或设定一些信号将锅炉控制系统处于 自动方式。
2.2.4只剩一台给水泵运行,机组指令以一 定速率降至170MW或由运行人员判断机组 稳定手动复位对应的功率值。
2.2.5三台磨运行时一台磨跳闸,机组指令以 一定速率降至230MW或由运行人员判断机 组稳定手动复位对应的功率值。
3 试验条件:
3.1 机组正常运行时,所有辅机设备运行正 常;
协调控制可在下列四种方式中的任一种: BF、TF、CCBF、CCTF。
RUN BACK试验:试验内容共六种,当其 中一种发生RUN BACK后,其以后动作基 本都是一样的。以给水泵为例:
条件:
(1)机组指令自动状态 (2) 机组指令大于一台给水泵的限值 强制其中一台电泵跳闸、第三台电泵不在 备用状态,即发生RUN BACK,RUN BACK动作后,可检查其发出的指令:
(2) 机组指令大于两台磨煤机的限值
强制其中一台磨煤机跳闸,即发生RUN BACK,RUN BACK动作后,可检查其发出 的指令: (1)协调控制系统为CCTF方式 (2)机组控制采用滑压方式 (3)机组指令按12MW/MIN的指令降负荷 (4)磨煤机按平衡块的功能自动把跳磨指令 加到运行磨上,并保持10S的时间不参加调 节,RUNBACK复位后,开始调节。
RB试验方案全解
RB试验方案全解国投宣城发电有限责任公司1号机组RUNBACK性能试验方案1系统概况国投宣城发电有限责任公司1号机组(600MW)锅炉为超临界压力、循环泵式启动系统、前后墙对冲低NOX轴向旋流燃烧器、一次中间再热、单炉膛平衡通风、固态排渣、全钢构架的变压本生直流炉。
汽轮机采用哈尔滨汽轮机厂有限责任公司生产的超临界、一次中间再热、冲动式、单轴、三缸四排汽、凝汽式汽轮机,型号为:N600-24.2/566/566。
发电机为哈尔滨电机厂有限责任公司生产的水氢氢冷却、静态励磁汽轮发电机。
分散控制系统采用西门子电站自动化有限公司的T3000分散控制系统。
其主要包括:数据采集系统(DAS)、模拟量控制系统(MCS)、顺序控制系统(SCS)、旁路系统(BPS)、炉膛安全监视系统(FSSS)。
机组控制系统设计有RB功能。
2试验目的在机组正常运行过程中如有一台重要辅机故障突然跳闸,机组带负荷能力下降,机组需操作的对象和影响的参数较多,操作人员往往会难以应对,同时操作过程中有可能过调或欠调,使参数进一步恶化而导致MFT事故发生,造成机组非计划停运,势必给电网的稳定运行造成冲击。
为大大减小网内大机组由于单台重要辅机跳闸而造成机组跳闸的概率,确保电网安全稳定运行,所有涉网机组须具备RB功能(根据机组类型及设计而定)并完成现场试验。
现场试验采用辅机实际跳闸动作检验RB功能逻辑及其降负荷动态过程的稳定性,同时验证主要参数自动调节性能、主保护及辅机联锁保护动作的正确性;通过试验整定RB功能动态参数,确定了不同辅机故障跳闸时运行监控方式及操作的要点。
使RB控制方案达到在自动方式下自动处理事故的功能。
3试验依据(1)、《安徽电网发电企业调度运行管理办法》皖经电力[2008]114号(2)、《火力发电厂热工自动化系统检修运行维护规程》DL/T 774-2004 4试验条件(1)、RB试验前,机炉协调控制系统应投入自动运行;协调控制系统增减负荷、保护闭锁试验正确;RB信号产生静态试验正确;RB信号与SCS、BMS、DEH系统联锁静态试验正确,就地设备可控;机组各主要保护动作正确并正常投入。
RB调试方案

RB功能概述
当至少有四层煤投运,发生RB信号后,自动跳闸F煤层 。 当至少有四层煤投运,发生RB信号后,且F煤层停运3秒后, 自动跳闸E煤层。 当至少有四层煤投运,发生RB信号后,且F、E煤层都停运 3秒后,自动跳闸D煤层
RB功能概述
7、 RB动态试验
动态试验前应具备的条件: CCS及子系统的控制已投入自动,并完成相应的定值扰动和 负荷变动试验,调节品质合格。 RB静态试验已完成,其结果满足要求。 机组保护系统已正常投入。 试验前对机组的运行状态进行检查,包括: 机组负荷大于90%,CCS处于CC运行方式,投入RB、RU/RD 功能。 检查RB动作时相应的滑压曲线,压力变化率设定为 MPa/MIN, 压力低限为MPa, (通过RB试验确定合适的变化率)。
RB功能概述
3、RB试验过程的依据
《火力发电厂基本建设工程启动及竣工验收规程 (1996年版)》 《火电机组启动验收性能试验导则》 《模拟量控制系统(MCS)组态图》 《分散控制系统(DCS)设计说明书(软件部分) 》(西安热工院提供)
RB功能概述
4、RB试验应具备的条件 模拟量控制系统,如:功率控制系统、燃烧控制系统、给水控 制系统、温度控制系统和其他辅助控制系统已正常投运,并经过 相应的定值扰动和负荷变动试验达到《验评标准》的要求。 协调控制系统CCS的四种运行方式:CC机炉协调控制方式、 BF锅炉跟踪控制方式、BI锅炉输入控制方式(包括汽机跟踪方 式)、BH锅炉手动控制方式(包括汽机跟踪方式)都已运行,并 已进行过负荷变动试验。运行方式的切换已经过考验,能手动或 自动进行无扰切换。滑压方式运行正常。 锅炉炉膛安全监控系统(FSSS)已正式投入运行,RB信号至 FSSS的联系正常,逻辑关系正确。 机组保护系统正常投入。
机组RB功能试验三措两案范本
机组RB功能试验三措两案范本1 系统概况公司_机组600MW亚临界参数燃煤发电机组。
锅炉为上海锅炉厂制造。
汽轮机为上海汽轮机厂制造的亚临界蒸汽参数、一次中间再热、单轴双缸双排汽汽轮机。
发电机由上海电机股份有限责任公司制造的600MW水氢氢冷却汽轮发电机。
机组热工控制为单元制,采用机、炉、电集中控制方式,机组热工控制设备为北京和利时MACSV-5型分散控制系统(DCS)和部分可编程控制器。
工程设计单位为西北电力设计院;工程施工单位为北京电力建设公司;上海调试所负责机组的分系统调试和整套启动调试。
和利时MACSV-5型分散控制系统包括以下系统及功能:闭环控制系统(MCS),炉膛安全管理系统(FSSS),汽机及锅炉侧顺序控制系统(SCS),数据采集处理监视系统(DAS),电气侧顺序控制系统(ECS)等。
机组DCS共由五台操作员站、一台工程师站、若干控制机柜及4台打印机组成。
2 试验目的保证控制系统测点及报警信号正确,设备可远方操作,相应反馈信号正确可靠,各系统保护及联锁安全、可靠,动作正常,投入运行,主要辅机跳闸后机组可以按照事先预定负荷及压力进行协调控制,保证机组的安全运行。
3 试验组织机构及分工3.1领导小组:组长:生产副总副组长:总工成员:专业管理人员职责:负责确认试验的可行性,审批试验方案和措施,对存在的风险进行评估,并采取相应的防范措施,在试验出现异常情况下有权命令停止试验。
3.2试验指挥组:组长:副三总师副组长:生技部、设备部经理成员:专业管理人员职责:下达试验步骤的操作命令,确定操作的正确性和安全性,在试验出现异常情况下有权命令停止试验。
3.3运行操作组:组长:发电部经理成员:专业管理人员职责:负责根据试验方案编写试验操作票、风险预控票,并进行落实,负责试验过程运行设备的各项操作及事故处理,安排运行水平较好的运行人员参加试验,尽可能减少RB、电泵大联锁失败时带来的损失,监督落实试验过程中设备的消缺情况,负责做好试验过程中各运行参数的记录。
RB功能试验措施
RB功能试验措施1 试验目的在实际运行工况下验证机组的RB功能,检验机组在RB工况下稳定运行的能力,特别是检验CCS、FSSS、DEH、MEH等热工系统在RB发生时的自动调节与保护能力是否能够保证整个机组继续安全、稳定地运行。
2 编制的依据2.1 《火电工程启动调试工作规定》(电力工业部建设协调司1996.5);2.2 《火电发电建设工程启动试运及验收规程》(DL/T-5437-2009);2.3 《火电施工质量检验及评定标准》热工仪表及控制装置篇(1998年版);2.4 《火电工程调整试运质量检验及评定标准》(电力部1996);2.5 《山东电网机(厂)网协调技术要求(试行)》(调技[2007]8号文);2.6 《山东电网机(厂)网协调管理规定》3 试验组织为保证试验顺利进行,成立由生产管理、调度、设备、运行、热工、DCS厂家、山东电研院等有关部门的领导和专业技术人员参加的试验小组,负责试验的组织、分工、协调工作,以保证本次试验工作的圆满完成。
(1)试验由当值值长统一指挥;(2)当值运行人员负责操作,当值机组长应指定专门人员负责试验的操作、监护、数据记录和就地巡视等工作;热工人员作好试验曲线的历史趋势;(3)试验时各有关人员应到场,人员到齐后进行试验工作;(4)要准备好充足的通讯联络工具,工作人员会使用;(5)参加试验的人员应熟悉本措施。
4 试验条件4.1 CCS、FSSS的单系统RB冷态试验及两个系统联调时的RB冷态试验均已做过且成功;热工其他系统及机、炉、电等相关专业的冷、热态试验都已完成且试验数据完备。
4.2 在机组带满负荷的情况下,CCS的下列自动调节系统已经运行12 小时以上:(1)协调控制系统。
机组的协调控制系统能正常运行,且TF(汽机跟随)方式要正常工作;(2)一次风压控制系统;(3)除氧器水位控制系统;(4)炉膛负压控制系统;(5)送风控制系统;(6)主燃料控制系统;(7)给水控制系统;(8)过热器温度控制系统;(9)再热器温度控制系统;(10)热井水位控制系统;(11)汽泵最小流量再循环控制系统。
火力发电机组RB专题讲座ppt课件

(三)两台及以上对称布置的同类辅机设备,可选取其中一台辅机进行RB 动态试验。两 次试验不宜选择同一侧设备进行试验。
(四)RB 动态试验时联锁、保护正常投入,ห้องสมุดไป่ตู้关自动调节系统及机组协调控制系统投入 运行。
(五)RB 动态试验前,机组负荷应高于90%额定负荷,并保持稳定运行一段时间:亚临 界机组1 小时以上为宜;超临界、超超临界机组2 小时以上为宜。
.
LOGO
▪ 五、RB功能存在的普遍问题及应对措施
▪ 2.硬件方面的问题: ▪ a 执行机构动作不匹配 ▪ b备用容量设备调节速率达不到要求。 ▪ c系统阀门质量不合格,关闭不严密或者开启不到位 ▪ d风机喘振。
高负荷运行时,发生高加解列,机组负荷快速上升到机组超负荷保护定 值,会发生机组跳事件,为实现在机组高负荷运行高加解列快速限制负 荷超限,部分机组设置了高加解列快速降负荷的逻辑。逻辑控制策略类 似RB功能,目前在业界定义高加RB。
.
LOGO
一、RB的类型及功能要求
2 RB的功能要求 ★空气预热器RB:一台空气预热器主电机跳闸,辅电机未成功联启,联跳相应数
量磨煤机。机组控制方式切至TF方式,负荷自动减至剩余空气预热器带负荷能 力所对应的负荷目标值。 ★引风机RB:一台引风机跳闸,联跳相应数量的磨煤机,机组切至TF方式,送、 引风机带负荷能力所对应的负荷目标值。 ★送风机RB:一台送风机跳闸,联跳相应数量的磨煤机,机组切至TF方式,送、引 风机带负荷能力所对应的负荷目标值。
(六)机组经满负荷运行工况验证,各项参数稳定正常,设备无主要缺
(七)已成立试验组织机构(工作小组),职责分工明确。
(八)试验方案按照程序审批完成,已做好风险评估及安全技术措施。
RB功能试验
机组RB功能试验1.RB试验的目的RB试验的主要目的是检验火电机组在辅机发生故障跳闸锅炉出力低于给定功率时,自动控制系统将机组负荷快速降低到实际所能达到的相应出力的能力,是对机组自动控制系统性能和功能的考验。
2 机组RB试验应具备的条件2.1 模拟量控制系统,如机组功率控制系统、燃烧控制系统、给水控制系统、温度控制系统和其他辅助控制系统已正常投用,并经过相应的定值扰动和负荷变动试验,调节品质达到《验评标准》的要求。
2.2 机组功率控制方式应为协调方式,其他几种运行方式(如机跟随、炉跟随)也已投运过,并已进行过负荷变动试验。
运行方式的切换已经过考验,能手动或自动进行无扰切换。
采用滑压运行的机组还需检查滑压运行控制功能。
2.3 锅炉炉膛安全监控系统(FSSS)已经正式投入运行,RB信号至FSSS的联系正常,逻辑关系正确。
2.4 机组保护系统正常投入。
3 RB功能静态试验3.1 在机组停机的情况下,根据机组设计的功能,依次模拟RB产生的条件,检查负荷运算回路、负荷指令速率变化等RB功能回路,并按经验数据(或设计)初步设定负荷指令变化速率。
3.2 检查RB工况发生后,与其他热控系统如FSSS系统的联系,确认其逻辑功能的正确性。
3.3 检查热控系统与汽机电调或同步器的接口匹配情况。
在RB工况下,有方式切换的系统应检查方式切换功能。
4 RB功能动态试验机组达到额定出力后,按试验大纲的要求,根据设计的RB功能分项进行动态试验,记录各被调量的动态曲线,RB工况下负荷指令变化率通过试验进行修正最后确定。
通过试验最后确定较合适的各辅机故障跳闸时机组负荷指令变化速率。
5 RB试验时对参数要求机组RB试验时,参数波动范围不危及机组安全和不引起机组保护动作跳闸,即为合格。
胜利RB措施
华威电厂#4机组RB试验措施1.试验目的:在实际运行工况下验证RB功能的实现,考验整个机组在RB工况下稳定运行的能力,特别是检验CCS、FSSS、DEH、MEH等热工系统在RB发生时的自动调节能力是否能够保证整个机组继续安全、稳定地运行。
2.试验条件:2.1 CCS、FSSS、DEH的单系统RB冷态试验及两个系统联调时的RB 冷态试验均已做过且成功;热工其他系统及机、炉、电等相关专业的冷、热态试验都已完成且试验数据完备。
2.2 在机组带满负荷的情况下,CCS的下列自动调节系统已经运行12 小时以上:(1)协调控制系统。
机组的协调控制系统能正常运行,且TF 方式要正常工作。
(2)除氧器水位控制系统。
(3)炉膛负压控制系统。
其中超驰控制必须经过冷态试验,确保控制可靠。
(4)送风控制系统。
(5)主燃料控制系统(6)给水控制系统中的汽泵三冲量控制系统和电泵三冲量控制系统。
(7)过热器温度控制系统。
(8)再热器温度控制系统。
(9)泵最小流量控制系统。
2.3 除氧器的汽源在压力下降时能安全自动地切换,保证在机组的负荷下降时除氧器压力不致下降太多而造成泵的汽蚀。
2.4 DEH在协调控制方式下运行。
包括:DEH系统处于REMOTE方式;发电机励磁开关闭合;DEH触点输入中断系统可靠;DEH向CCS 发出“自动允许”和“DEH在协调中”的自动状态回答信号。
2.5 FSSS的机炉大联锁试验成功,RB的动作逻辑正常。
2.6 TF方式的调节符合要求。
2.7 “机组负荷摆动试验”已完成,控制性能满足机组运行要求。
2.8 主、辅机设备均无重大缺陷2.9 DEH系统的TPC功能试验成功,减负荷速率能满足要求。
3.试验简介:3.1 RB试验项目:“跳一侧风机RB”试验:当机组负荷>75%MCR时,开始此项试验。
3.2 RB动作过程:机组负荷>75%MCR且运行在协调方式下时,假定一台风机跳闸,经5秒延时后,CCS将控制方式由协调方式自动转入TF方式,中止ADS方式(远方自动调度方式);将主汽压设定值锁定在合适的数值,CCS侧汽机控制自动切换至TF方式且DEH原则上应长期运行在TPC压力控制,以防止压力下降太多,锅炉侧由FSSS 切掉两层粉剩余两层保持手动;同时LDC(负荷指令计算机)的输出以10%MCR/MIN的速率减负荷到50 %MCR,并以此做为送风量及氧量校正信号和送往DEH的指令,并向FSSS发出“启动50%RB信号,FSSS 则按照自上而下的原则跳闸给粉机,最终保留两层粉运行,50% RB 过程结束。
RB试验说明

RB试验说明一、概述LMCC包括负荷指令运算回路和负荷指令限制回路,负荷指令限制回路一般包含五个部分:最大/最小允许回路;负荷返航回路(RB);负荷闭锁增/减回路(BI/BD);负荷迫升/降回路(RU/RD);快速负荷切断回路(FCB)。
负荷指令限制回路的作用:对主、辅机和设备运行状况进行监视,一但发生故障而影响机组的实际负荷或危及机组安全,就要对机组的负荷要求指令进行必要的处理,以保证机组能够继续安全稳定地运行。
RB的作用:根据主要辅机的切投状况,在线地识别与计算出机组的最大可能出力值,如果实际负荷指令大于最大可能出力值,则发生负荷返回,将实际负荷指令降至最大可能出力值,同时规定机组的负荷返回速率。
所以,RB针对的问题是:风、煤、水辅机跳闸。
采取的措施:强迫负荷按规定的速率降至规定的目标值。
二、RB的设计思路:RB有手动投切按钮,RB触发后,切为TF模式运行。
RB保持10分钟,即10分钟后,RB停止对系统的作用。
理想情况下,希望不需要人工干预,在发生重要辅机跳闸后,自动调整到预定的工况,安全稳定运行。
辅机间的联锁由SCS完成,RB成功于否主要考验自动控制装置的调整能力。
1、RB投入条件(逻辑与):⑴有四台以上的磨运行;⑵负荷大于350MW;2、RB复位条件(逻辑或):⑴手动复位;⑵CCS模式解除后10分钟;⑶无RB触发条件(脉冲);三、RB触发的条件:我厂RB的触发设计有七种情况,当RB投入后,机组运行在CCS模式,有下面任意七种情况之一时RB。
1、任一台送风机跳闸且负荷大于300MW2、任一台引风机跳闸且负荷大于300MW3、任一台一次风机跳闸且负荷大于300MW4、任一台空预器跳闸且负荷大于300MW5、任一台给水泵跳闸且负荷大于300MW6、二台磨煤机跳闸且负荷大于450MW7、三台磨煤机跳闸且负荷大于300MW。
四、RB动作内容:1、RB触发后,送信号到BMS联锁跳磨(除因为磨引起的RB外)。
机组RB试验方案(修改稿)

目录1. 编制依据2. 系统概况3. RB试验目的4. RB试验前应具备的条件5. RB试验的职责分工6. RB试验前的准备工作7. RB试验动作过程及主要操作程序8. 试验安全措施1 编制依据1.1 《火力发电厂基本建设工程启动及竣工验收规程(1996年版)》电力部电建[1996]159号1.2 《火电工程启动调试工作规定》电力部建设协调司建质[1996]40号1.3 《火电工程调整试运质量检验及评定标准》电力部建设协调司建质[1996]111号1.4 《电力建设施工及验收技术规范(汽轮机机组篇)》DL 5011-921.5 《火电机组达标投产考核标准(1998年版)》电力工业部1.6 《火电机组达标投产动态考核办法(试行)》 [1998]国家电力公司1.7 《电力建设安全工作规程(火力发电厂部分)》DL 5009.1-92能源部能源基[1992]129号1.8 东北电力科学研究院质量管理标准2 系统概况3 RB试验目的机组大负荷运行时,当机组的主要辅助设备突然故障,使机组承担负荷能力下降,需要系统快速减少燃料并使实际负荷指令下降到所能承担的水平。
RB 试验目的为考验机组协调系统和各子系统对外部大扰动的响应速度使机组在负荷返回过程中能够安全稳定的继续运行,平稳过渡到所能承担的负荷能力。
4 RB试验前应具备的条件4.1 MFT装置整定数据正确,动作正常。
4.2 DEH静态试验合格,调节系统各部套无卡涩现象,电调经甩负荷模拟试验。
4.3 ETS静态试验合格,汽轮机超速保护装置良好,电超速、机械超速保护动作值应在110%额定转速范围内。
4.4 SCS各联锁、闭锁、保护动作正常。
4.5 MCS各系统投入,协调系统及各子系统投入经实际检验工作正常并调节良好。
4.6 DAS系统及常规主要监视仪表指示正确。
4.7各管道上的安全门在超压时均能正常动作。
4.8发电机主断路器和灭磁开关合、跳闸良好。
4.9励磁系统经过模拟试验,电压调节安全可靠。
RB讲义
模拟量控制系统及AGC、一次调频、RB讲义1 概述大型单元火电机组的模拟量控制主要是对锅炉、汽轮机及其辅助设备运行的自动控制,控制的目的是使机组自动适应工况的变化而且保持在安全、经济的条件下运行,其控制对象包含负荷、压力、温度、流量等等。
因此,模拟量控制已经成为现代火力发电厂生产的主要组成部分。
协调控制系统是模拟量控制的主体,大型单元火电机组的机炉控制均采用协调控制方式。
在协调控制系统设计时,主要考虑的是调节中的稳定与扰动问题,其基本思想为将调节控制系统设计成以扰动量为粗调、以被调量为细调的且带前馈的反馈调节系统,主要就是把单元机组的机、炉、电协调动作,通过平衡协调控制风、煤、水与电负荷之间的动态比例,共同适应外界负荷的需求,同时又能保证机组安全、经济的稳定运行。
随着火电机组容量的不断增大,电网除对模拟量控制系统的品质提出更高的要求外,还引入了AGC(自动发电控制)、一次调频及RUNBACK功能,通过系统功能的完善,能更好的稳定机组,大大的有利于电网的安全运行。
2 模拟量控制系统介绍模拟量控制系统也称连续控制系统,是通过各种仪表及自动化装置构成的自动控制回路。
2.1 模拟量控制系统的组成模拟量控制系统常采用反馈控制的方式来实现,也称为反馈控制系统或闭环控制系统,由调节对象(即被调量)、调节器、执行器以及其他相关的辅助单元组成,其基本结构可描述为被调量经测量装置测量后与设定值进行比较,当出现偏差后,调节器按一定的运算逻辑输出规律的调节量,动作执行器而改变被调量,使其接近于设定值。
典型的反馈控制系统结构如下图:图中所示为典型反馈控制系统的简易框图,目前大型火电机组采用的DCS模拟量控制系统也是基于此原理工作的,但在实际应用中也相应的加入了一些针对性的回路及逻辑,使控制更理想。
当然,不同的控制对象也具有不同的特性(这里就不做特殊说明了),例如放大特性、惯性特性、积分特性等,所以在实际应用中,对调节器参数、执行器控制精度以及测量部件灵敏度的要求都取决于控制对象的特性。
RB试验方案全解
RB试验方案全解一、试验设计RB试验采用了随机对照双盲的设计。
参与试验的病人将被随机分配到两组,一组接受新药治疗,另一组接受安慰剂或既有标准治疗。
试验者和病人均对所接受的治疗方式不知情,以避免主观因素对结果的影响。
二、研究对象RB试验通常选择患有其中一种特定疾病的病人作为研究对象。
这些病人须符合特定的入选标准,例如年龄范围、疾病分期、并发症情况等。
试验还会设定一些排除标准,例如其他重大疾病的存在、药物过敏等,以确保研究结果的准确性。
三、研究指标RB试验关注的主要指标是新药的疗效和安全性。
疗效指标可以有多种选择,例如临床症状的改善程度、生存时间延长的比例等。
安全性指标包括药物副作用的发生率、严重程度以及药物与其他药物的相互作用等。
根据具体研究目的,还可以选择其他指标进行评估。
四、样本量估计样本量估计是RB试验设计中的重要一环。
合理的样本量能够提高试验结果的稳定性和可靠性。
样本量的估计通常基于试验的主要疗效指标和既定的统计学方法,包括信号检测能力、α和β的选择等。
研究者需要合理选择样本量,以减少统计假阳性和假阴性的风险。
五、随机化方法随机化是RB试验的核心步骤之一、为了保证试验结果的可靠性和代表性,病人的分组需要通过随机方法进行。
常用的随机化方法包括简单随机化、分层随机化和区组随机化等。
随机化的过程通常由研究者在试验开始前进行,以保证每个病人在分组上的基本一致性,减少系统性偏倚的可能。
六、盲法RB试验采用了双盲设计,试验者和病人对所接受的治疗方式均不知情。
双盲设计的目的是减少主观因素的干扰,使试验结果更加客观和可靠。
在试验过程中,只有独立的数据监管委员会可以了解病人的分组情况,确保盲法的有效性。
七、统计分析RB试验的数据分析通常采用统计学方法进行。
试验结果的统计分析包括描述性统计和推断性统计。
描述性统计主要用于描述试验对象的基本特征、指标的分布等。
推断性统计则通过假设检验、置信区间和效应量等指标来评估新药的疗效和安全性效果。
rb试验方案(讨论稿)
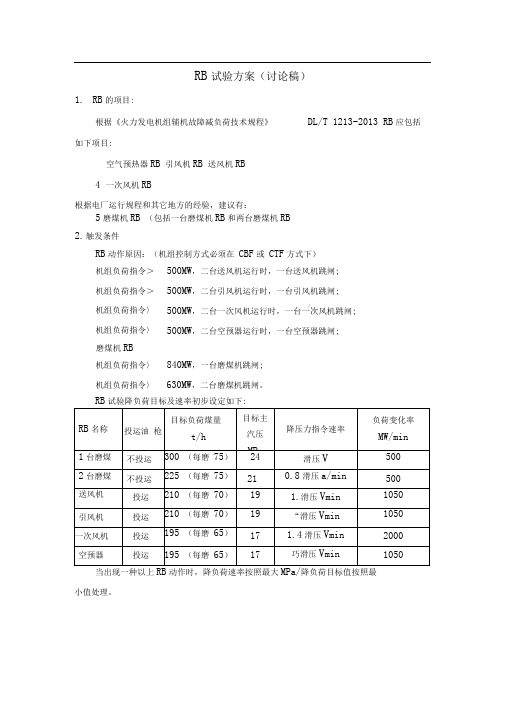
RB 试验方案(讨论稿)1. RB 的项目:根据《火力发电机组辅机故障减负荷技术规程》DL/T 1213-2013 RB 应包括如下项目:空气预热器RB 引风机RB 送风机RB 4 根据电厂运行规程和其它地方的经验,建议有:5磨煤机RB (包括一台磨煤机RB 和两台磨煤机RB2. 触发条件RB 动作原因:(机组控制方式必须在 CBF 或 CTF 方式下)磨煤机RBRB 试验降负荷目标及速率初步设定如下:当出现一种以上RB 动作时,降负荷速率按照最大MPa/降负荷目标值按照最小值处理。
一次风机RB机组负荷指令> 500MW ,二台送风机运行时,一台送风机跳闸;机组负荷指令> 500MW ,二台引风机运行时,一台引风机跳闸;机组负荷指令〉 /、500MW ,二台一次风机运行时,一台一次风机跳闸;机组负荷指令〉 500MW ,二台空预器运行时,一台空预器跳闸;机组负荷指令〉 840MW ,一台磨煤机跳闸;机组负荷指令〉 630MW ,二台磨煤机跳闸。
以上根据数据来自《电厂运行规程》。
按以往一些工程的经验,目标负荷煤 量的计算方法为:RB 前的煤量/RB 前的负荷X RB 的目标负荷。
3. RB 动作结果磨煤机RB 动作时,机组主控方式自动切至BI 方式。
锅炉主控BID 指令自 动下降,机组负荷快速下降。
空预器RB 弓I 风机RB 送风机RB 动作时,相关辅机联锁动作,停对应侧的 送、引风机。
机组主控方式自动切至 BI 方式,DEH 自动切至初压模式。
BID 指 令自动下降到50 %,机组负荷快速下降。
助燃油枪自动投入运行。
(初步定为投 最下层油枪,投入油枪的速度是在油压能够保持稳定,不影响油枪燃烧的情况下, 尽可能快的投入各油枪,各油枪的投运时间间隔可能小于正常层启动程控的时间 间隔,)磨煤机以从上到下的次序跳闸,保留三台磨运行。
一次风机RB 动作时,机组主控方式自动切至 BI 方式,DEH 自动切至初压 模式。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
5. 本次RB试验所作改进及传动: 5.1 对BMS回路所作改动 增加在RB动作后,至BMS跳上层磨的逻辑,通过磨 的急停逻辑,跳掉该磨。 只剩下一层磨煤机运行时,为了防止锅炉灭火, 自动将对应层的油层投入。 磨煤机风量低保护加15S的延时。 5.2 对SCS回路所作改动 5.2.1锅炉大联锁按纽投入与改造前的设计逻辑相 同。 5.2.2锅炉大联锁按纽不投
统具有良好的调节品质,对这部分回路也 作了相应的改动,并在RB试验中,能够满 足调节要求。 通过此次试验,证明在大容量机组上 进行RB试验是必要的,它可以有效的防止 在重要辅机发生故障时造成机组的误跳闸, 自动平稳的实现机组从不稳定的状态过渡 到稳定的状态,减少运行人员的误操作, 延长机组的使用寿命。
7.3
针对在RB投入后,有可能投入锅炉大 联锁,也有可能不投锅炉大联锁。对于 这种情况,也对逻辑作了相应的增加和 补充,即在锅炉大联锁不投的情况下, 在空预器跳闸后延时 60S 的时间关闭同 侧的引风机、送风机、一次风机入口挡 板。 7.4 为了让机组调节各子系统具有适应RB工 况下的调节品质,对给水、主蒸汽温度、 再热蒸汽温度、炉膛负压等各主要子系
强制其中一台磨煤机跳闸,即发生RUN BACK,RUN BACK动作后,可检查其发出 的指令: (1)协调控制系统为CCTF方式 (2)机组控制采用滑压方式 (3)机组指令按12MW/MIN的指令降负荷 (4)磨煤机按平衡块的功能自动把跳磨指令 加到运行磨上,并保持10S的时间不参加调 节,RUNBACK复位后,开始调节。 两台磨煤机运行,一台跳闸的动作情况 不发RB。
2.2.5三台磨运行时一台磨跳闸,机组指令以 一定速率降至230MW或由运行人员判断机 组稳定手动复位对应的功率值。 3 试验条件: 3.1 机组正常运行时,所有辅机设备运行正 常; 3.2 机组能够达到额定负荷; 3.3 锅炉BMS逻辑传动正常,机组投入所有 锅炉主保护;
3.4 所有锅炉闭环调节系统均已通过静态调 试,所有RUN BACK条件下的静态传动检查 试验已经完成; 3.5 锅炉各单项闭环调节系统在锅炉运行至 带满负荷过程中均完成动态试验,自动调 节系统全部投入,调节品质优良; 3.6 机、炉主控协调控制经调试合格,机组 负荷变动试验完成,协调控制系统工作在 BF/TF/CCBF/CCTF方式中任意一种,在调 试协调控制系统调试过程中应将RB指令封 住,一旦在调试过程中出现RB情况则改为 手动调节;
7 试验结论:
7.1 本次RB试验共完成了磨RB、一次风机 RB、送风机RB、引风机RB、给水泵RB试 验项目,试验结果证明,机组能够在重要 辅机跳闸的情况下,RB完,能够满足现场 运行要求。
7.2 RB对锅炉大联锁的逻辑回路进行了改动, 在辅机(引、送)跳闸后,只把对应同 侧的风机导叶关闭,等跳闸风机故障排 除后,即可以很快对系统进行恢复。减 少和缩小了事故发生的范围。在对应操 作设备有故障,不能按时关回去的情况 下,可以把相应跳闸,从而避免了这种 情况的发生。
5.2.2.2送风机跳闸 运行中如A侧送风机跳闸,且负荷大于 180MW,送风机RB动作。对应侧A一次风机 入口引叶应关为0。如A一次风机导叶未关 到位(关节点未闭合),延时120秒后分别 跳A一次风机;若在120S的时间内关到位 (关节点闭合), A一次风机不跳闸。 B侧送风机跳闸动作原理和过程与A侧相同。
6.2 一次风机一侧失去: 运行机组在A、B、C三台磨煤机、两 台给水泵运行状况下,带负荷300MW。在 各方人员准备就绪情况下,手动停止一台 一次风机导致50%RUN BACK,此时将立即 切除A磨煤机。并且负荷中心切至CTF方式, 定压方式切为滑压方式,机组主控按照 50MW/MIN的速率减负荷,并把机组指令 的前馈信号加到汽机主控。锅炉主控按目 标负荷对应的煤量进行调节。
的汽机主控和锅炉主控与一次风机RB、引 风机RB、送风机RB的动作情况类似。 6.5.2 跳闸的A给水泵勺管按平衡块的运算功 能把指令加到了另一台运行的B给水泵勺管 上,但由于设备故障,B给水泵的指令只加 到75%。 6.5.3 试验结果见曲线
图3中,曲线1~6分别为实际负荷,主汽 压力,主汽压力定值,负荷指令,燃料指 令,主汽调门指令;曲线15为汽包水位。 给水泵RB过程中,汽包水位的最低值为219mm。
协调控制可在下列四种方式中的任一种: BF、TF、CCBF、CCTF。 RUN BACK试验:试验内容共六种,当其 中一种发生RUN BACK后,其以后动作基 本都是一样的。以给水泵为例: 条件: (1)机组指令自动状态 (2) 机组指令大于一台给水泵的限值 强制其中一台电泵跳闸、第三台电泵不在 备用状态,即发生RUN BACK,RUN BACK动作后,可检查其发出的指令:
发生送风机、一次风机、引风机RUN BACK时,其动作指令同上。发生RUN BACK以后,协调控制系统转入CCTF方式, 通过汽机主控控制机前压力。 发生磨煤机跳闸,与给水泵、送风机、 一次风机、引风机RUN BACK动作稍有不 同。三台磨煤机运行,一台磨煤机跳闸的 动作过程如下: (1)机组指令自动状态 (2) 机组指令大于两台磨煤机的限值
RB动作时,增加炉膛负压自动、送风机风 压自动、一次风压自动/手动切换回路。
改善炉膛负压自动、汽包水位、主汽温度、 再热汽温度等主要回路的调节品质,增加 了一些前馈控制回路,使其能够满足RB工 况。 6 动态试验过程: 以上各项静态试验完成后,开始进行动态 试验。试验过程及结果如下:
以上各项静态试验完成后,开始进行动态试 验。试验过程及结果如下: 6.1 磨煤机跳闸: 机组在A、B、C三台磨煤机运行状况 下,带负荷300MW。在各方人员准备就绪 情况下,手动停掉任一台磨,此时控制按 上述的动作情况进行。 由于试验当时情况仓促,没有记录下 曲线。
2.2.2 两台引风机运行,其中一台跳闸,机 组指令以一定速率降至 170MW 或由运行人 员判断机组稳定手动复位对应的功率值。 2.2.3两台一次风机运行,其中一台跳闸, 机组指令以一定速率降至170MW或由运行 人员判断机组稳定手动复位对应的功率值。 2.2.4只剩一台给水泵运行,机组指令以一 定速率降至170MW或由运行人员判断机组 稳定手动复位对应的功率值。
6.2.2 由于试验当时情况仓促,没有记录下 曲线。 6.3 失去一台送风机: 6.3.1 运行机组在A、B、C三台磨煤机运行, 带负荷300MW,在各方人员准备就绪情况 下,手动停止一台送风机导致50%RUN BACK,停一台送风机将同侧一次风机导叶 关到0。RB动作后的调节情况与一次风机RB 相似。
3.7 汽机旁路关闭,旁路处于不可用状态; 3.8试验的内容、要求及时间安排均已通过 试运指挥组及调度批准; 3.9 送、引、一次风挡板在满负荷工况下, 开度有一定裕量,不能超过70%。 3.10 送风自动调节品质得到改善,能在 50%~100%负荷范围内进行调节。 4 静态试验 条件:锅炉、汽机主控器在自动方式,机组 在自动方式。 强制或设定一些信号将锅炉控制系统处于 自动方式。
5.2.2.1 引风机跳闸 运行中如A侧引风机跳闸,且负荷大于 180MW,引风机RB动作。对应侧A送风机入 口动叶、A一次风机入口引叶应关为0。如A 送风机动叶未关到位(关节点未闭合), 延时120秒后跳A送风机;A一次风机导叶未 关到位(关节点未闭合),延时120秒后分 别跳A一次风机;若在120S的时间内关到位 (关节点闭合),A送风机、A一次风机不 跳闸。 B侧引风机跳闸动作原理和过程与A侧相 同。
5.2.2.3空预器跳闸 运行中如A侧空预器跳闸,延时60S后,对应侧A引 风机入口静叶、A送风机入口动叶、A一次风机入 口引叶应关为0。 B侧空预器跳闸动作原理和过程与B侧相同。
对MCS回路所作改动
RB动作时,超驰关一级、二级减温水阀,再热器 喷水阀保持60秒。 RB动作时,增加引风机入口静叶、送风机入口动 叶、一次风机入口导叶在开到位的跟踪回路。
1.概述
蒙达#4机组锅炉采用的是北京巴威锅炉厂生产的亚临界压 力控制循环锅炉;汽机采用的是北京汽轮电机有限责任公 司生产的N330—17.75/540/540型中间再热冷凝式汽轮机。 制粉系统采用中速直吹磨(共有四台,平时三台运行), 采用前后墙对冲燃烧方式。热控系统采用加拿大贝利公司 生产的INFI—90系统。此机组于1999年初投入生产,由于 投产时没有将CCS(协调控制系统)投入,后经过改造, 能将CCS投入,但没有包括RUNBACK(机组故障快速减 负荷,以下简称RB)。随着热工自动控制技术的发展,已 具备将RB功能投入的条件,趁着本次机组大修的机会,主 要由内蒙古电力科学研究院负责,华北电力大学和蒙达公 司配合,完成了此次RB改造功能。
2.RB试验目的和RUN BACK的内容
2.1 RB试验目的:来自2.1.1 检查机组主要辅机发生故障时,机组快 速自动降负荷,维持锅炉允许出力的能力。 2.1.2 检查机组RB(RUN BACK)功能及各自动 调节系统的控制能力。
2.2 此次RUN BACK的内容: 2.2.1 两台送风机运行,其中一台跳闸,机组指令 以一定速率降至170MW或由运行人员判断机组 稳定手动复位对应的功率值。
RB实验措施
主讲人:孙建国
目
录
1.概 述· · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · 3 2. RB试验目的和RUN BACK的内容· · · · · · · · 3 3.试验条 件· · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · 3 4.静态试 验· · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · 5 5.本次RB试验所作改进及传动· · · · · · · · · · · · · 6