稳定平台钢丝绳传动结构振动分析
变质量提升系统钢丝绳轴向-扭转耦合振动特性
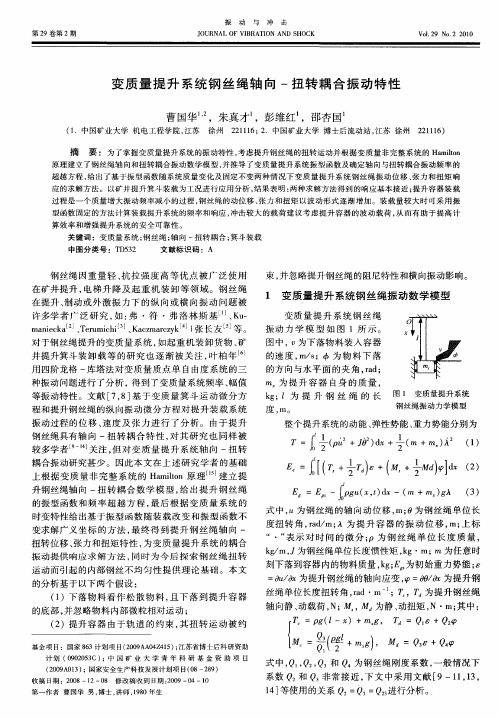
m 为 提 升 容 器 自身 的质 量 , ; f为 提 升 钢 丝 绳 的 长 图 1 变质量提升系统
度, m。 钢丝绳振动力学模型
型函数 固定的方法计算装载提升系统 的频率和响应 , 冲击较大 的载荷 建议考虑提 升容器的波动载荷 , 从而有助 于提高计 算效率和增强提升系统的安全可靠性 。
关 键 词 :变 质 量 系 统 ; 丝 绳 ; 向 一 转 耦 合 ; 斗 装 载 钢 轴 扭 箕
中 图分 类 号 :T 5 2 D3 文 献标 识 码 :A
摘 要 :为了掌握变质量提升系统的振动特性 , 考虑提升钢丝绳的扭转运动并根据变 质量 非完整系统 的 Ha io ml n t
原 理 建 立 了钢 丝 绳 轴 向 和扭 转耦 合 振 动 数 学 模 型 , 推 导 了变 质 量 提 升 系 统 振 型 函 数及 确 定 轴 向与 扭 转 耦 合 振 动频 率 的 并 超 越 方 程 , 出 了基 于 振 型 函数 随 系 统 质 量 变 化及 固定 不 变 两 种 情 况 下 变 质 量 提 升 系 统 钢 丝 绳 振 动 位 移 、 力 和 扭 矩 响 给 张 应 的求 解 方 法 。以 矿 井 提 升箕 斗 装 载 为 工 况 进 行 应 用 分 析 , 果 表 明 : 种 求 解 方 法 得 到 的 响 应 基本 接 近 ; 升容 器 装 载 结 两 提 过 程 是 一 个 质 量 增 大 振 动 频 率 减 小 的过 程 , 丝 绳 的 动 位移 、 力 和扭 矩 以 波 动 形 式 逐 渐 增 加 。装 载 量 较 大 时 可 采 用 振 钢 张
矿山提升机钢丝绳振动检测研究
矿山提升机钢丝绳振动检测研究一、引言矿山提升机是矿山生产中不可或缺的设备之一,而钢丝绳作为提升机的关键部件,在工作中承受巨大的拉力和振动。
因此,对于钢丝绳的振动检测就显得十分重要,可以有效提升矿山提升机的安全性和可靠性。
二、钢丝绳振动的原因及危害1. 钢丝绳振动的原因钢丝绳在提升机的工作过程中,受到了多个因素的作用,如重物的荷载、提升机的运动、风等因素,这些因素会导致钢丝绳的振动。
2. 钢丝绳振动的危害(1)疲劳破坏:钢丝绳的长期振动容易导致金属疲劳,使钢丝绳逐渐疲软、断裂,从而对提升机的安全造成威胁。
(2)工作噪音:钢丝绳的振动会产生噪音,不仅影响操作人员的工作环境,还可能扰乱周围环境。
(3)影响使用寿命:钢丝绳的振动会大大减少其使用寿命,缩短提升机的维护周期和更换成本。
三、钢丝绳振动检测方法1. 传统方法传统上,钢丝绳的振动检测通常是通过人工监测实现的。
工作人员观察钢丝绳的振动情况,根据经验来判断钢丝绳的安全性。
然而,这种方法存在主观性高、准确性低等问题。
2. 振动传感器方法近年来,随着传感器技术的快速发展,振动传感器成为一种有效的钢丝绳振动检测方法。
通过在钢丝绳上安装振动传感器,可以实时地监测钢丝绳的振动情况,并将数据传输给监控系统进行分析。
3. 数据处理方法振动传感器采集到的数据一般需要经过数据处理才能更好地获取有用的信息。
常用的数据处理方法包括小波分析、时频分析、频域分析等,这些方法可以帮助判断钢丝绳振动的频率、幅值等参数。
四、钢丝绳振动检测研究进展1. 检测技术的改进研究者们通过改进振动传感器的灵敏度和响应速度,提高了钢丝绳振动的检测精度。
例如,引入MEMS技术的振动传感器,可以实现更加准确的振动监测。
2. 数据处理方法的优化针对不同的钢丝绳振动特点,研究人员提出了更加精确的数据处理方法,如小波包分析、时频分析等,有效提取了钢丝绳振动信号中的有用信息。
3. 智能检测系统的研发随着人工智能技术的快速发展,研究人员开始将其应用于钢丝绳振动的检测研究中。
钢丝振动的原理

钢丝振动的原理钢丝振动的原理是指钢丝在受到外部力量作用下发生的周期性振动现象。
钢丝是一种具有弹性的材料,当受到外力作用时,可以产生弹性形变,并在脱离外力作用后,恢复到原始形态。
这种弹性特性使得钢丝可以在受到外部扰动时产生振动。
钢丝振动的原理可以用简单的弹簧振子模型来解释。
当一根钢丝受到外力拉扯时,会产生张力,使得钢丝形成一定的弹性形变。
如果在这个状态下受到外部的扰动,比如捶打或者摆动,钢丝就会开始振动。
这是因为外部扰动改变了钢丝的原始平衡位置,使其产生了弹性能量,并且在外力作用下产生周期性的来回振动。
这种振动的周期与钢丝的弹性系数、质量和外力大小有关。
除了弹簧振子模型,钢丝振动的原理还可以通过波动理论来解释。
当钢丝受到外力作用时,会在重力和张力的作用下产生一定的波动,即机械波。
当外部力量作用消失后,波动会继续传播,并且在传播的过程中产生反射和干涉现象,最终形成周期性的振动。
这种振动的频率和波速与钢丝的材质、张力和外力的频率有关。
另外,钢丝振动的原理也可以从能量转化角度来解释。
当钢丝受到外部扰动时,外力对钢丝做功,使得钢丝产生了一定的动能。
而在外力消失后,钢丝会持续振动并逐渐失去能量,最终停止振动。
这是因为钢丝的动能被逐渐转化为热能和声能,并且在阻尼的作用下,振动逐渐衰减直至停止。
因此,钢丝振动的原理也可以通过能量守恒和能量转化来解释。
总的来说,钢丝振动的原理涉及到了弹性形变、波动理论和能量转化等多个方面。
钢丝受到外力作用后,产生了周期性的振动,其振动的频率、幅度和衰减速度与钢丝的物理特性和外力特性有关。
因此,通过对钢丝振动的原理进行综合分析和理解,可以更好地控制和利用钢丝振动的特性,从而应用于各种领域,如音乐乐器、工程结构和科学实验等。
斗式提升机的提升钢丝绳对振动分析的影响颇大

在斗式提升机载荷的动力学分析中,提升钢丝绳的处理方式对振动分析的影响颇大。不论是将其视作一根无质量弹簧,还是采用瑞利法,所建立的都是单自由度模型,虽然计算简单,但分析误差过大;将钢丝绳分段处理而建立多自由度模型,在较大程度上提高了分析精度,斗式提升机的钢丝绳被视作连续弹性体进行研究。
在对斗式提升机装载过程中箕斗和钢丝绳纵向振动行为的研究中,视钢丝绳为连续弹性体,并考虑了容器质量的时变性,讨论了箕斗纵向振动响应与装煤流量之间的联系。在研究斗式提升机的钢丝绳载荷时,先后将钢丝绳视作弹性连续体和离散系统,给出了近似的提升系统动张力基频表格。
斗式提升机的提升钢丝绳对振动分析的影响颇大
由于斗式提升机的许多提升系统有升降人员的任务,在安全性得到保障的前提下,乘坐的舒适性是又一追求目标,以此为内容的研究也取得了一定的成果:以带和梁两种模型探讨斗式提升机提升钢丝绳的动态行为,发现对容器和导向装置间滚轮的合成刚度和阻尼系数进行优化可以使向上运动过程中的振动能量减少70%以上。
摩擦式提升机钢丝绳抖动故障诊断与分析
摩擦式提升机钢丝绳抖动故障诊断与分析
导语:钢丝绳抖动对多绳摩擦式提升机的运行危害很大,如果不能引起足够的重视,往往会给矿山的安全生产带来隐患。
针对某矿副井摩擦式提升机钢丝绳出现严重抖动的问题,经分析,把引起钢丝绳抖动的原因聚焦在钢丝绳张力是否平衡、提升机电控和主轴承是否存在故障3 个方面,并制定相应测试方案。
经过现场测试和结果分析,最终确定了钢丝绳抖动的原因。
摩擦式提升机依靠摩擦力来提升重物,就其工作原理来说,它与缠绕式提升机最大的区别在于其钢丝绳不是缠绕在卷筒上,而是搭在摩擦轮上,在绳的两端各悬挂一个提升容器,借助于安装在摩擦轮上的绳槽和钢丝绳之间的摩擦力来传递提升的动力,使提升容器上下移动,从而完成物料、人员的提升或下放。
从摩擦式提升机的运行原理可以看出,钢丝绳的稳定运行对整个提升系统起着关键性的作用,一旦钢丝绳出现问题,往往给整个提升系统的安全运行带来危害[1-2]。
比如当钢丝绳出现抖动时,会直接导致摩擦力的不稳,当抖动幅度变大或抖动时间延长时,很容易出现滑绳事故,损伤摩擦衬垫,而摩擦衬垫的损伤又会加剧钢丝绳的抖动,从而产生恶性循环,最终导致严重的后果。
但是目前矿山设备的管理部门对钢丝绳抖动问题不够重视,出现问题后无视问题的存在,使得设备带病运行,导致事故频发。
因此,亟待对钢丝绳抖动产生的原因进行深入分析。
钢结构加工中的振动和稳定性分析技术
钢结构加工中的振动和稳定性分析技术随着工业的不断发展,各种各样的建筑工程和设备越来越多地采用钢结构,因为它具有优良的质量、良好的可靠性和耐久性,同时还拥有较高的承载能力。
然而,在钢结构加工的过程中,难免会出现振动对整个加工过程的影响,同时,稳定性也是一个重要的考虑因素。
因此,钢结构加工中的振动和稳定性分析技术也逐渐成为了一个研究的热点。
首先,我们来看一下振动对钢结构加工的影响。
振动指的是对物体的周期性的位移,它往往是由于钢结构加工过程中的某些因素引起的,例如锯切、钻孔或者钻铣等等。
在加工中,如果振动的频率与结构自身的固有频率相同,就会引起共振,并可能导致结构破坏。
因此,了解和控制振动的变化是非常重要的。
在进行钢结构加工时,可以采用一些控制振动的手段,例如使用阻尼器或增加支撑点的数量等等。
同时,还可以使用数学模型或计算机模拟等工具来对振动进行分析。
例如,有一些基于有限元法的软件,可以模拟钢结构的振动情况,帮助工程师更好地进行振动控制和优化设计。
除了振动的问题,稳定性也是一个钢结构加工中需要解决的问题。
稳定性指的是杆件在承载能力范围内不会发生形变或破坏的能力。
在钢结构中,稳定性的好坏会直接影响结构的安全性和可靠性。
因此,稳定性的分析和研究也变得非常重要。
为了更好地进行稳定性分析,我们需要了解和掌握一些基本的稳定学原理。
例如,在进行稳定性计算时,需要根据构件的实际长度和所承受的载荷,来确定杆件的截面和形状,从而达到稳定的目的。
此外,还需要进行受压杆件的挠曲计算,关注钢结构各个部分之间的相互作用,以及避免负载集中和偏心造成的不均衡问题。
总体来说,在钢结构加工中,振动和稳定性分析技术是非常重要的。
通过合理的振动控制和稳定性分析,可以大大提高钢结构的安全性和可靠性。
该领域正在不断地进行研究和发展,我们相信,未来的钢结构加工一定会更加高效、优质和可靠。
钢丝绳自振频率-概述说明以及解释

钢丝绳自振频率-概述说明以及解释1.引言1.1 概述钢丝绳是一种以细钢丝为基本材料制成的柔性结构,在工程领域中被广泛应用于吊索、索桥、电梯等领域。
钢丝绳具有高强度、耐磨损、耐腐蚀等优点,但是在实际使用过程中,钢丝绳受到外部振动和扭转的影响,容易发生自由振动现象。
钢丝绳的自振频率是描述其振动特性的重要参数,对于确保钢丝绳的安全运行具有重要意义。
本文将对钢丝绳的结构与特性、自振频率相关理论以及影响钢丝绳自振频率的因素进行系统性的分析和探讨,旨在深入了解钢丝绳振动特性及其影响因素,为钢丝绳的安全运行提供理论支持和实践指导。
1.2 文章结构文章结构部分的内容:本文共分为三个部分:引言、正文和结论。
在引言部分,我们将对钢丝绳的自振频率进行简要介绍,包括概述钢丝绳的结构与特性,以及探讨与钢丝绳自振频率相关的理论。
同时,我们也会阐明本文的目的,即探讨影响钢丝绳自振频率的因素。
在正文部分,我们将详细讨论钢丝绳的结构与特性,探究钢丝绳的自振频率相关的理论,并分析影响钢丝绳自振频率的因素。
最后,在结论部分,我们将对本文的内容进行总结,展望钢丝绳自振频率在工程实践中的应用,并进行结束语的总结。
1.3 目的本文的目的主要在于探讨钢丝绳的自振频率及其相关理论,深入分析影响钢丝绳自振频率的因素。
通过对钢丝绳结构和特性的介绍,以及对自振频率相关理论的解释,读者将能够更加全面地了解钢丝绳在振动过程中的表现和特点。
同时,本文旨在为相关领域的研究者和工程师提供参考和指导,帮助他们更好地设计和应用钢丝绳,提高其在工程实践中的性能并降低潜在的风险。
最终,希望通过本文的探讨和总结,为钢丝绳的使用和改进提供有益的启示和建议,推动该领域的发展与进步。
2.正文2.1 钢丝绳的结构与特性钢丝绳是由多股细钢丝扭绞而成的复合材料结构,具有较高的强度和耐久性。
其主要结构包括钢丝(单股细钢丝)、合股(多根单股细钢丝绞合),以及包覆层(通常是塑料或金属保护层)。
钢丝绳在航天发射平台升降系统中的应用与优化
钢丝绳在航天发射平台升降系统中的应用与优化引言:随着航天事业的发展,对于航天器的发射需求也在不断增加。
航天发射平台的升降系统扮演着至关重要的角色,其性能直接关系到航天任务的安全与成功。
钢丝绳作为升降系统的关键部件之一,其应用与优化对于升降系统的稳定性和可靠性具有重要意义。
本文将重点探讨钢丝绳在航天发射平台升降系统中的应用与优化,通过分析和评估现有技术,提出相应的改进方案,以期为航天事业的发展提供参考。
一、钢丝绳在航天发射平台升降系统中的应用1. 承载能力钢丝绳的高强度和良好的承载能力使其成为升降系统中理想的材料之一。
在航天发射平台的升降系统中,钢丝绳承担着支撑整个平台和载荷的重要任务。
通过正确选择和使用钢丝绳,可以确保升降系统在高负荷情况下的稳定性和安全性。
2. 抗疲劳性航天发射平台的升降系统在使用过程中会受到频繁的往复运动,因此钢丝绳的抗疲劳性至关重要。
通过选用高品质的钢丝绳材料,并严格控制使用条件,可以延长钢丝绳的使用寿命,减少因疲劳损伤而导致的系统故障和事故。
3. 自重与阻力钢丝绳的自重和阻力也是航天发射平台升降系统中需要考虑的重要因素。
合理计算和控制钢丝绳自重和阻力,可以减小对升降系统的影响,提高系统的运行效率和稳定性。
4. 其他应用除了在升降系统中作为承载材料外,钢丝绳还可以用于航天发射平台的其他部件,例如安全绳索、缆绳等。
通过利用钢丝绳的优势特性,可以提高整个平台的可靠性和安全性。
二、钢丝绳在航天发射平台升降系统中的优化措施1. 材料优化选择合适的钢丝绳材料对于升降系统的性能和可靠性至关重要。
应优先考虑高强度、耐疲劳性强的材料,并对材料进行必要的检测和验证。
此外,钢丝绳的防腐蚀性能也需要得到充分的考虑,以确保其在复杂环境下的长期稳定性。
2. 结构优化升降系统的结构设计对钢丝绳的使用和性能影响较大。
通过合理的结构优化,可以减小钢丝绳的应力集中和磨损,提高其使用寿命。
同时,应注重提高系统的平衡性和稳定性,减少钢丝绳在运动过程中的摆动和晃动。
装配式建筑施工中的施工振动控制与建筑结构稳定性分析

装配式建筑施工中的施工振动控制与建筑结构稳定性分析随着现代建筑技术的发展,装配式建筑在减少施工时间、改善质量和提高效率方面具有显著优势。
然而,在装配式建筑施工过程中,施工振动可能会对建筑结构产生不利影响。
因此,控制施工振动并确保建筑结构的稳定性成为一个重要的课题。
一、装配式建筑施工中存在的振动问题在进行装配式建筑施工时,涉及到吊装、下放、吸顶等操作,这些都有可能引起振动。
特别是大型模块化构件的安装过程中所产生的振动,往往较为明显。
1. 振动来源:主要包括吊车操作、机械设备运转和人员活动等。
其中,吊车操作是造成较大振动的主要原因之一。
2. 振动传播:一旦发生振动,其能量会通过地基传递到整个建筑结构,进而引起不同程度的结构变形和破坏。
3. 振动频率:传统混凝土建筑的自振频率通常较低,而装配式建筑由于材料和构造的差异,其自振频率可能较高,对振动敏感度也更高。
二、施工振动控制方法为了控制装配式建筑施工中的振动,提高建筑结构的稳定性,下面介绍一些常用的控制方法。
1. 合理施工方案:在设计施工方案时,应考虑到各种影响因素,并采取相应的减震措施。
比如调整吊装方式、改进工艺流程等。
2. 控制设备震动:对于引发主要振动源的设备,可以采取隔离、降噪等措施来减小其产生的振动量。
3. 使用减震器件:通过使用减震器件如阻尼器和隔震垫等来降低建筑结构对外界振动的敏感度,并起到吸收或分散能量的作用。
4. 监测与调整:实时监测施工过程中的振动情况,并及时进行调整。
通过不断观察和收集数据来分析、评估并完善振动控制方案。
三、建筑结构稳定性分析除了施工振动的控制,对于装配式建筑的结构稳定性也需要进行分析和评估。
1. 结构设计:在进行装配式建筑设计时,应根据振动频率和加载条件等因素,合理选择材料、构造形式和设计参数,确保建筑结构满足抗振要求。
2. 水平力分布:考虑到施工过程中产生的水平力矩,要在结构设计中合理分配水平刚度和强度,以增加整体稳定性。
钢缆牵引输送带的降噪与减振技术研究
钢缆牵引输送带的降噪与减振技术研究引言:钢缆牵引输送带是现代工业中广泛使用的一种物料输送设备。
它具有结构简单、运行可靠、输送能力大等优点,被广泛应用于矿山、码头、发电厂等场所。
然而,随着社会对环境噪音的关注度不断提高,输送带产生的噪音也成为一个令人关注的问题。
同时,输送带的振动也会对设备和工人造成一定的影响。
因此,钢缆牵引输送带的降噪与减振技术研究成为了当前研究的重点和迫切需求。
一、噪音产生原因及影响钢缆牵引输送带在工作过程中会产生较大的噪音,主要来源于以下几个方面:1. 钢缆的运动摩擦:钢缆在输送过程中与滚筒、导向辊等设备部件摩擦产生噪音;2. 物料撞击声:物料在输送过程中碰撞产生声音;3. 机械运行噪音:输送带上的电机、滚筒、链轮等设备运行时产生噪音;4. 空气流动噪音:空气在输送带上流动产生噪音。
这些噪音会对生产环境和工人的健康造成一定的影响,如引起听力损害、睡眠障碍、注意力分散等问题。
另外,噪音扰民也会影响周围居民的生活质量,应引起重视。
二、降噪技术研究为了降低钢缆牵引输送带的噪音水平,研究人员提出了多种降噪技术,下面主要介绍几种常用的方法:1. 隔膜降噪技术:通过在钢缆和滚筒之间设置隔膜,减少钢缆与滚筒的直接接触,从而降低运动摩擦噪音。
隔膜材料多采用橡胶或聚氨酯等有吸音性能的材料,能够有效减少噪音的产生。
2. 减震技术:通过在输送带的底座上安装特殊的减震装置,将输送带与地面之间的振动传递减少,从而降低传输噪音。
减震装置可以采用弹簧、橡胶阻尼器等。
三、减振技术研究除了降噪技术,减振技术也是钢缆牵引输送带研究的重点之一。
输送带的振动不仅影响设备运行稳定性和寿命,还会产生噪音并对工作人员造成不利影响。
以下是几种减振技术的介绍:1. 减速器优化设计:减速器是输送带的核心部件之一,其运行效率和设计结构对减振效果有重要影响。
通过优化减速器的设计,减少振动的产生并提高传递效率。
2. 减振弹簧设计:在输送带的托辊、滚筒等部位安装减振弹簧,通过弹性变形吸收振动能量,起到减振效果。
钢丝绳精密传动机构的分析与实验研究
钢丝绳精密传动机构的分析与实验研究分类号UDC工学硕士学位论文学号钢丝绳精密传动机构的分析与实验研究硕士生姓名金思庆学科领域机械工程研究方向精密工程与计算机控制指导教师范大鹏教授国防科学技术大学研究生院二oo六年十一月国防科学技术大学研究生院学位论文摘要高性能光电稳定跟踪平台要求平台机械系统精度高、动态性能好,采用钢丝绳精密传动可以满足这种需求。
钢丝绳精密传动具有低噪声、无空回、高刚度、小惯量、传动平稳和维护费用较低等优点,它在工业、商业、航空、军事、医疗和研究的应用,l:都具有较高的性价比。
本文以此为背景,研究钢丝绳精密传动的关键技术问题。
论文研究了钢丝绳精密传动不同的结构形式,提出了钢丝绳精密传动的设计方案,分析了钢丝绳在不同绳槽上的受力、运动情况和绳槽之间的匹配关系,得出有效传动的条件。
对钢丝绳精密传动精度进行了理论分析,求解出实际传动比、滑移角、传动系统各部分的刚度和总的扭转刚度。
运用计算机仿真分析出系统各部分刚度和负载之间的关系、系统总刚度相对于系统中各参数改变的规律和灵敏度。
设计了测试钢丝绳精密传动特性的试验台,验证了钢丝绳精密传动的精度,测试了传动系统的动态性能。
本文为开发基于钢丝绳精密传动的高性能光电稳定平台奠定了初步的基础。
关键词:精密传动,钢丝绳传动,绳槽匹配,刚度,灵敏度第i页ABSTRACTHighperformancephotoelectricstabilizationandautomaticpointingandtrackingplatformrequiresmollandmolehighprecisionanddynamicresponsetoitsmechanitaIsystem.Steelcabledrivercanmeetthisrequirement.Precisesteelcabledriverhastheadvantagesofbothhighaccuracyandstiffness,aswellascompactcomposition.Itprovidesbothcostandperformanceadvantagesinalltypesofindustrial,commercial,aerospace,military,medicalandresearchapplications.Onthisbackground,thispaperstudiesmainlyonthe研marytechnologiesofprecisecabledriver.111ispaperstudiesdifferentstructuralformsofprecisesteelcabledriver,thedesignprojectofprecisesteelcabledriver.ItanalysesthemovementofsteelcableandtheforceloadedonsteelcableindiffelIntgrooves.andanalysesthematchingbetweendifferentgrooves.Anditeducesthequalificationoftransmittingavailably.Itanalysestheprecisionoftheprecisesteelcabledrivertheoretically.andeducesactuaIratio,slippageangel,thestiffnessofdifferentpartsoftheprecisesteelcabledriverandthetotaltorsionstiffnessofthetransmissionsystem.Thecharacteristicsofbothtorsionstiffnessandstiffilesssensitivityaretheoreticallyanalysedandsimulated.Theexperimentstrategyissetupinordertotesttheperformanceofthesteelcabledriver.ThellSUItsshowthattheprecisesteeIcabledrivercouldreachreasonablegoodaccuracy.Thispaperlaysapreparatoryphotoelectricstabilizationandautomaticprecisesteelcabledriver.foundationfordevelopinghig}l—precisionpointingandtrackingplatformbasedonKeyWords:precisedriver,steelcabledrive,cablegroovematching,stiffness.sensitivity第ii页表目录表格2.1表格2.2表格5.1表格5.2表格5.3表格5.4表格5.5表格5.6表格Al表格A2钢丝绳精密传动结构形式综合比较……………………………………。
传动链振动分析报告(法库项目)
104风力发电机组日期Date 2015-02-12传动链振动分析报告(辽宁法库项目)编制Prepared by校对Checked by审核Approved by标准Standardized by批准Released by发布Released by文件号Document No. 版本Revision A 密级Classification 页码Number of pages □绝密Strictly Confidential ■机密Confidential □秘密Secret □内部Internal□公开Published注意事项和声明Notification and disclaimer本文件中所有的事项尽可能的全面和准确,但本文件可能还需要进一步修正。
未经广东明阳风电集团有限公司确认和许可而依据此文件进行制造和其他用途时,广东明阳风电产业集团有限公司将不负责因此所产生的风险。
任何发现有关本文件的不足和错误之处,请文件使用者立即反馈给版权所有者。
本文件仅在接收方同意以上条件时才给予提交。
This document may still be undergoing checking by the institution responsible, Although all work has been carried out very thoroughly; this document is still subject to changes. The risk of manufacturing in accordance to this document or any other use of the results stays exclusively with the customer and is not in the responsibility of MY.Should any information in this document be not complete, incomprehensible or faulty, it is the responsibility of the user of this document to immediately clarify the facts with the author and the client. This document is only submitted under the assumption that the receiver accepts the above conditions.有效附件List of Valid Documents序号Item文件名Document Name文件号Document No.版本Rev.1 2更改记录表List of Alterations序号Item 版本Rev.所在页Modified Pages更改内容Modifications日期Date目录Content1概述 (5)1.1故障说明 (5)1.2机组模态 (5)2录播数据分析 (6)3振动传感仪数据分析 (13)3.1不同部位三个方向振动分析 (14)3.2双侧扭力臂数据分析 (20)4处理措施 (23)4.1带阻滤波器 (23)4.2传动链加阻参数 (24)5总结 (24)1概述1.1故障说明吉林法库双台子项目,截止到2014年12月25日,吊装完成3台机组。
矿井提升机停车时减速机响声和钢丝绳抖动的原因分析和解决办法

矿井提升机停车时减速机响声和钢丝绳抖动的原因分析和解决办法矿井提升机是矿山生产的关键设备,特别是副井提升机承担着运送人员的任务,其安全性和可靠性直接影响着矿工的人身安全,一直倍受重视。
但时常会听到矿方抱怨,提升机停车时停得过猛、减速机有撞击声、钢丝绳抖动及罐笼上下窜动,致使乘罐人员极不舒服且有恐惧感。
然而在分析原因和协商解决办法时,机、电、液各专业之间相互扯皮、互相推诿。
笔者通过对多年现场调试经验分析总结,认为这是一个多种原因的综合问题,需要机、电、液各专业紧密配合,多方面入手共同解决。
1、故障现象提升机停车时停得过猛、减速机有撞击声、钢丝绳抖动及罐笼上下窜动数次,特别是罐笼在井口停车时抖动较大,每次提车抱闸后罐笼都要上下蹿动数次,且幅度很大(上下幅度有300mm),并伴有剧烈的机械撞击声。
2、原因分析遇到这种情况,首先要多观察,进而确定是电控系统本身不稳定还是仅在停车点有该现象。
判断的依据是看加速段、等速段、减速段的运行情况,如果不出现电流、速度大幅度波动的情况,则认为系统是基本稳定的。
之后重点解决停车点抖动的问题。
经过现场的多次观察发现,一般情况下都是因为停车爬行速度过大,液压站压力变化太大、太快,从而使制动力大幅度阶跃变化,属全压制动,造成瞬时减速度太大;又由于提升系统,属于大转动惯量系统,惯性大而反坠,如果停车时速度和压力配合不好,极易发生抖动。
以某矿为例,原系统接近停车时爬行速度为0.4m/s,贴闸点自减速点开始直到停车点,油压从最大敞闸油压一次性降到零,无贴闸油压。
无贴闸油压主要因为贴闸是从减速开始的,如果贴闸紧就会造成闸盘过热,严重时损坏闸盘,但如果不贴闸就容易发生停车抖动。
这是一对矛盾,必须从根本上加以解决。
3、解决措施(1)、设置二次爬行速度。
将原爬行段分为两部分,第一阶段以0.5m/s的速度爬行,接近停车点0.5m的地方转入第二阶段,第二阶段以0.2m/s的速度爬行,这样既可以解决停车速度高的问题,又不至于延长运行时间。
自行式高空作业平台结构稳定性分析
第11卷第1期2013年2月中 国 工 程 机 械 学 报CHINESE JOURNAL OF CONSTRUCTION MACHINERYVol.11 No.1 Feb.2013基金项目:国家“十一五”科技支撑计划重点资助项目(2008BAJ09B01)作者简介:张 珂(1969-),男,教授,工学博士.E-mail:zhangke@sjzu.edu.cn自行式高空作业平台结构稳定性分析张 珂1,黄小征1,陈建平2,樊玉言1(1.沈阳建筑大学交通与机械工程学院,辽宁沈阳 110168;2.杭州赛奇高空作业机械有限公司,浙江杭州 310015)摘要:根据高空作业平台设计规范,结合某型高空作业平台结构特点,采用力矩平衡法建立高空作业平台抗倾覆稳定性数学模型,分析计算出两种危险工况下整机稳定性情况;又利用有限元分析软件ANSYS创建起升机构的APDL(ANSYS Parametric Design Language)参数化模型,进行该起升机构的线性和非线性屈曲分析.结果表明:该起升机构在工作状态下不会出现失稳现象.关键词:高空作业平台;稳定性;线性;非线性;屈曲分析中图分类号:TM 344.1 文献标志码:A 文章编号:1672-5581(2013)01-0011-05Structural stability analysis on self-propelledaerial work platformZHANG Ke1,HUANG Xiao-zheng1,CHEN Jian-ping2,FAN Yu-yan1(1.School of Traffic and Mechanical Engineering,Shenyang Jianzhu University,Shenyang 110168,China;2.Hangzhou Sivge Aerial Work Machinery Co.,Ltd.,Hangzhou 310015,China)Abstract:According to the design specifications of aerial work platform,the structural features areconsidered upon a specific aerial work platform.By employing the torque balancing method to establish amathematical model on anti-overturning stability,two dangerous working conditions are analyzed andcalculated.An APDL(ANSYS Parmetric Design Language)parametric model is created using ANSYSTMforlinear and nonlinear buckling analysis on hoisting mechanism.Accordingly,it is found from results that thehoisting mechanism will be stabilized enough under working conditions.Key words:aerial work platform;stability;linearity;nonlinearity;buckling analysis 高空作业平台是应用于各行业的高空作业,如高空设备安装、检修等的可移动的高空作业产品,广泛应用于电力、市政、园林、通信、机场、造船、交通、广告、摄影等高空作业领域.随着经济技术的快速发展,高空作业平台的安全与稳定问题越来越引起人们的重视,为保证结构安全及人身安全,必须要弄清整机和关键部件的正常工作载荷范围和失效机理.在稳定性研究方面,前人已经做了很多工作,得到很多有价值的研究成果.例如,刘晓婷等[1]利用力矩平衡法在研究蜘蛛式高空作业平台抗倾覆稳定性过程中,得到了单、双人负载时高空作业平台的稳定性系数范围,高空作业平台在这个稳定系数范围内可达到整体稳定;谷礼新等[2]利用有限元法在研究塔式起重机起重臂结构稳定性的过程中,得到了起重臂在典型工况下的特征值,利用该特征值就可以模拟实际情况进行稳定性分析,对塔机的设计具有指导和借鉴意义.本文应用力矩法[3]和有限元法,分别对6012型可移动式高空作业平台的整体和局部稳定性进行分析校核.1 高空作业平台的结构组成及工况分析1.1 结构组成自行式高空作业平台主要由底架、支腿、升降机构、连接架、回转支撑、工作平台、护栏等组成.C A M E O 凯模C A E 案例库w w w .c a m e o .o r g .c n 中 国 工 程 机 械 学 报第11卷 其中底架采用4轮驱动,并附有双转向系统和复杂地面辅助导轨移动系统;升降机构采用不平行布置的6桅柱组结构,既提高了工作平台的稳定性,又增强了升降机构在各个方向上的刚度特性;工作平台可以进行360°旋转,且在护栏两端能够加装活动式延伸装置,扩大了工作平台的工作范围.自行式高空作业平台整机三维Solidworks模型如图1所示.图1 自行式高空作业平台整机三维模型Fig.1 Whole three-dimensional model of self-propelledaerial work platform1.2 工况分析根据欧盟标准EN280,工作平台上工作人员及设备的作用位置如下所述:即2名操作员位于平台的同一边,其中操作员1位于平台左上角,操作员2位于操作员1正下方0.5m处,且离护栏边缘的距离均为0.1m;设备(物料)的集中力载荷均匀分布在平台总面积的1/4处,且位于平台的左侧;考虑x,y向风载荷,并用黑箭头表示,载荷分布如图2所示.图2 工作人员及设备的作用位置Fig.2 Effect location of staff and equipment 工况1:自行式高空作业平台起升到最高位置,工作平台不旋转;工况二:自行式高空作业平台起升到最高位置,工作平台旋转90°.为了便于计算分析,假设2个工作人员都作用于第一个操作人员的位置,并用小长方体来表示,如图3,4所示.2 整机抗倾覆稳定性分析与计算根据高空作业平台设计规范,结合自行式高空作业平台的结构特点,借鉴已有起重机抗倾覆稳定性的计算方法,本文采用力矩平衡法分别计算出两种工况下的稳定力矩和倾覆力矩,并进行验算[4].2.1 工况1下的抗倾覆稳定性模型求解为了便于观察并节省空间,下面用平台缩合状态来表示平台起升到最高位置状态.自行式高空作业平台横向和纵向的受力分析如图5,6所示.在工况1条件下,利用力矩平衡法,分别列出高空作业平台横向和纵向整机抗倾覆稳定性的数学模型.2.1.1 工况1下的平台横向整机抗倾覆稳定性分析稳定力矩为Ms=mt(L8/2-L6)cosθ+(me+mp)L7cosθ(1)式中:Ms为稳定力矩;mt为机器总质量;L8为2个支腿之间中心距离;L6为整机偏心距离;θ为底架允许的最大倾角;me为设备质量;mp为工作人员总质量;L7为工作人员重心与左侧支腿支点之间的距离.21C A M E O 凯模C A E 案例库w w w .c a m e o .o r g .c n 第1期张 珂,等:自行式高空作业平台结构稳定性分析图5 平台横向受力分析示意图Fig.5 Diagram of platform transverse stress analysis图6 平台纵向受力分析示意图Fig.6 Diagram of platform longitudinal stressanalysis 倾覆力矩为Mt=FeL1cosθ+FpL2cosθ+FmL3cosθ+FgxL4cosθ+FmxL5cosθ(2)式中:Mt为倾覆力矩;Fe为作用在设备的风力;L1为风力设备作用点与地面之间的距离;Fp为作用在人身上风力;L2为工作人员的作用点与地面之间的距离;Fm为工作人员手操作力;L3为工作人员手操作力与地面之间的距离;Fgx为作用在平台和护栏上的横向风力;L4为风力在平台和护栏的作用点与地面距离;Fmx为作用在起升机构上的横向风力;L5为起升机构的作用点与地面之间的距离.依据《GB3811—83起重机设计规范》,高空平台的稳定性安全系数K为K=Ms/Mt=75 144.5N·M/12 960.82N·M=5.8>1所以,在工况1条件下,平台横向是稳定的.2.1.2 工况1下的平台纵向整机抗倾覆稳定性分析稳定力矩Ms=mt(L8/2-L6)cosθ+(me+mp)L2cosθ(3) 倾覆力矩为Mt=FeL1cosθ+FpL2cosθ+FmL3cosθ+FgyL4cosθ+FmyL5cosθ(4)式中:Fgy为作用在平台和护栏上的纵向风力;Fmy为作用在起升机构上的纵向风力.依据《GB3811—83起重机设计规范》,高空平台的稳定性安全系数K为K=Ms/Mt=50 261.69N·M/18 651.78N·M=2.7>1所以,在工况1条件下,平台纵向也是稳定的.2.2 工况2抗倾覆稳定性模型求解在工况2条件下,自行式高空作业平台横向和纵向的受力分析如图7,8所示.图7 平台横向受力分析示意图Fig.7 Diagram of platform transverse stress analysis图8 平台纵向受力分析示意图Fig.8 Diagram of platform longitudinalstress analysis 利用力矩平衡法分别列出高空作业平台横向和纵向整机抗倾覆稳定性的数学模型.2.2.1 工况2下的平台横向整机抗倾覆稳定性分析稳定力矩为Ms=mt(L8/2-L6)cosθ+(me+mp)(L8/2+900-L7)cosθ(5) 倾覆力矩为Mt=FeL1cosθ+FpL2cosθ+FmL3cosθ+FgyL4cosθ+FmxL5cosθ(6) 稳定性安全系数K=Ms/Mt=75 865.67N·M/14 679.19N·M=5.2>1,所以在工况2条件下,平台横向是稳定的,且有较大的安全储备.31C A M E O 凯模C A E 案例库w w w .c a m e o .o r g .c n 中 国 工 程 机 械 学 报第11卷 2.2.2 工况2下的平台纵向整机抗倾覆稳定性分析稳定力矩为Ms=mt(L8/2-16)(7) 倾覆力矩为Mt=FeL1cosθ+FpL2cosθ+FmL3cosθ+FgxL4cosθ+FmyL5cosθ+(me+mp)·(2.04m-L7-L8)cosθ(8) 稳定性安全系数K=Ms/Mt=48 204.003N·M/19 343.843N·M=2.5>1,所以在工况2条件下,平台纵向也是稳定的.3 起升机构局部稳定性的分析与计算 自行式高空作业平台采用桅柱式起升机构进行升降,各桅柱组主要由高强度铝合金型材、板式传动链条、链轮等组成,是升降工作平台的重要传动部件.因此其局部稳定性的好与坏,对保证施工安全、减少安全事故具有十分重要的意义.本文利用有限元分析软件ANSYS创建起升机构的APDL参数化模型[5],进行该起升机构的特征值屈曲分析[6].3.1 建立起升机构有限元模型考虑到铝合金6组桅柱的材料特性,本次分析选用Beam188梁单元来建立起升机构的有限元模型.Beam188是2节点的三维线性梁单元,每个节点有6个自由度,并能够承受拉、压、弯、扭特性;材料的弹性模量E=70GPa,泊松比λ=0.3,密度ρ=2.7t·m-3.网格划分后,起升机构有限元模型如图9所示,该模型共有462个节点,420个单元.图9 起升机构有限元模型Fig.9 Finite element model of hoisting mechanism3.2 起升机构特征值屈曲分析对已建立的有限元模型施加约束和外载荷:限制起升机构底部6个节点的全部自由度及全耦合起升机构顶部6个节点的全部自由度,以更好模拟连接架与桅柱组的连接关系;对起升机构顶部6个节点施加竖直向下的外载荷(忽略风载荷影响);对起升机构施加竖直向上的重力加速度(g=9.8m·s-2),用惯性力来模拟其重力.然后打开预应力效果选项,进行静力学求解.然后利用Block Lanczos方法获得起升机构前10阶的屈曲特征值和屈曲模态[7-8].起升机构前10阶的屈曲特征值如表1所示.表1 升降机构前十阶的屈曲特征值Table 1 Former ten step buckling eigenvalue ofhoisting mechanism阶数/阶屈曲特征值载荷步/步载荷子步/子步1 2.5461 1 12 12.098 1 23 19.771 1 34 30.633 1 45 30.654 1 56 32.654 1 67 32.064 1 78 32.819 1 89 52.343 1 910 64.315 1 10 从表1可以看出:起升机构一阶屈曲特征值为2.546 1>1,则屈曲临界载荷为23 398.65N,这在实际应用中是比较安全的,不会发生屈曲破坏,起升机构具有很好的稳定性.3.3 起升机构非线性屈曲分析由于结构失稳很可能发生在线性屈曲之前,因此在实际问题分析中,需要引入缺陷进行非线性分析.非线性屈曲分析考虑了几何非线性和材料塑性这两种主要非线性因素,因此相对于特征值屈曲分析,其结果更加精确,更符合结构极限状态时的受力和变形性能,对实际工程的设计有一定的指导意义[9-10].本文采用20个子步的加载方式,施加100%的偏位缺陷2.26mm,并把1.3倍线性屈曲载荷逐步加载到起升机构顶部6个节点上,进行非线性屈曲分析.并选取顶部节点299作为参考点,根据其载荷位移曲线来判别结构是否达到稳定临界状态.参考点299的载荷位移曲线如图10-12所示.可以看出,当载荷增加到19 000N时,起升机构将会发生失稳现象,与特征值屈曲分析相比,屈曲载荷有一定程度的下降,计算结果偏于安全.在该极限载荷的作用下,参考点299最大位移为Ux=90mm,Uy=-0.5mm,Uz=-0.16×10-5 mm.41C A M E O 凯模C A E 案例库w w w .c a m e o .o r g .c n 第1期张 珂,等:自行式高空作业平台结构稳定性分析 图10 x方向载荷-位移曲线Fig.10 x direction load-displacement curve图11 y方向载荷-位移曲线Fig.11 y direction load-displacement curve图12 z方向载荷-位移曲线Fig.12 z direction load-displacement curve4 结语本文应用力矩平衡法和有限元法,对自行式高空作业平台进行了整体和局部稳定性分析,得到如下结论:(1)应用力矩平衡法建立高空作业平台抗倾覆稳定性数学模型,分析计算出两种危险工况下整机的稳定性情况.结果表明:在两种危险工况下,自行式高空作业平台是比较稳定的,不会发生倾翻.(2)应用有限元法,对起升机构进行特征值屈曲分析,结果表明:该起升机构在工作状态下不会出现失稳现象,具有良好的稳定性.(3)由于考虑了初始缺陷、塑性性能和大变形响应等因素的影响,非线性屈曲分析所得到的屈曲极限载荷要小于相同条件下的线性分析结果,计算值偏于安全,且有较大的安全余量.参考文献:[1] 刘晓婷,赵洪亮,邢宇,等.高空作业平台抗倾覆稳定性分析[J].起重运输机械,2011(1):19-22.LIU Xiaoting,ZHAO Hongliang,XING Yu,et al.Overturning-resistance stability analysis of aerial workplatform[J].Lifting Transport Machinery,2011(1):19-22.[2] 谷礼新,郑海斌,彭卫平.塔式起重机起重臂结构和稳定性有限元分析[J].机电工程技术,2005,34(8):27-28.GU Lixin,ZHENG Haibin,PENG Weiping.Tower craneboom structure and stability of finite element analysis[J].Electromechanical Engineering Technology,2005,34(8):27-28.[3] 刘鸿文.材料力学:I[M].第四版.北京:高等教育出版社,2008.LIU Hongwen.Material mechanics:I[M].4th ed.Beijing:Higher Education Press,2008.[4] 梁淇洪.汽车起重机失稳分析与防范[J].机电工程技术,2007,36(5):100-102.LIANG Qihong.Truck crane instability analysis andprevention[J].Electromechanical Engineering Technology,2007,36(5):100-102.[5] 龚曙光,谢桂兰,黄云清.ANSYS参数化编程与命令手册[M].北京:机械工业出版社,2010.GONG Shuguang,XIE Guilan,HUANG Yunqing.ANSYSparameter programming and command manual[M].Beijing:China Machin Press,2010.[6] 王新敏.ANSYS工程结构数值分析[M].北京:人民交通出版社,2012.WANG Xinmin.ANSYS numerical analysis of engineeringstructure[M].Beijing:Public Transportation Press,2012.[7] 李萍.基于ANSYS的钢筋混凝土拱桥特征值屈曲分析[J].桥梁结构,2008(7):45-48.LI Ping.The eigenvalue buckling analysis for reinforcedconcrete crane on arch bridge based on ANSYS[J].BridgeStructure,2008(7):45-48.[8] 屠凤莲,范顺成,罗文龙.基于ANSYS的支撑架特征值屈曲分析[J].河北工业大学学报,2010,39(3):6-10.TU Fenglian,FAN Shuncheng,LUO Wenlong.The eigenvaluebuckling analysis for support frame based on ANSYS[J].Journal ofHebei Industry University,2010,39(3):6-10.[9] 刘朝辉,柳翼,李轶鹤.ANSYS在结构稳定性中的应用[J].湖南工程学院学报,2002,12(2):33-35.LIU Zhaohui,LIU Yi,LI Yihe.Application of ANSYS instructure stability[J].Journal of Hunan Institute ofEngineering,2002,12(2):33-35.[10] 张晓霞,姚远.基于ANSYS机车牵引杆屈曲分析[J].计算机应用技术,2008,35(7):36-37.ZHANG Xiaoxia,YAO Yuan.Buckling analysis for tractionrod on locomotive based on ANSYS[J].ComputerApplication Technology,2008,35(7):36-37.51C A M E O 凯模C A E 案例库w w w .c a m e o .o r g .c n。
钢丝绳解耦机构
钢丝绳解耦机构钢丝绳解耦机构是一种常见的机械装置,用于解耦两个或多个旋转部件,以减小振动和噪音,提高机械系统的可靠性和运行效率。
本文将介绍钢丝绳解耦机构的原理、结构和应用。
一、原理钢丝绳解耦机构利用钢丝绳的弹性特性将两个旋转部件之间的动力传递解耦。
当一个旋转部件受到外界干扰或负载变化时,会产生振动。
如果直接将这种振动传递到另一个旋转部件上,会导致整个机械系统的振动加剧,从而影响机械系统的稳定性和工作效率。
而钢丝绳解耦机构通过将两个旋转部件用钢丝绳连接起来,使它们之间的动力传递通过钢丝绳实现,从而在一定程度上减小了振动的传递。
二、结构钢丝绳解耦机构由两个旋转部件、钢丝绳和固定支撑件组成。
两个旋转部件分别通过轴承与固定支撑件相连,钢丝绳则通过滑轮或滚轮与两个旋转部件相连。
钢丝绳的一端固定在一个旋转部件上,另一端则固定在另一个旋转部件上。
当一个旋转部件受到干扰或负载变化时,由于钢丝绳的弹性,其振动会通过钢丝绳传递到另一个旋转部件上,从而实现解耦效果。
三、应用钢丝绳解耦机构广泛应用于各种机械系统中,特别是那些对振动和噪音有较高要求的场合。
以下是钢丝绳解耦机构的几个典型应用领域:1.航空航天领域:飞机发动机、飞机起落架等旋转部件之间的解耦,可以减小振动和噪音,提高飞机的稳定性和舒适性。
2.汽车工程领域:汽车发动机和变速器之间的解耦,可以减小引擎振动对车内的传导,提高乘坐舒适性。
3.工业生产领域:机械设备中各个旋转部件之间的解耦,可以减小振动对设备的影响,提高设备的稳定性和工作效率。
4.电力工程领域:发电机组中发电机转子和发电机外壳之间的解耦,可以减小发电机振动对发电机组的影响,提高发电机组的可靠性和运行效率。
钢丝绳解耦机构是一种有效的机械装置,可以减小振动和噪音,提高机械系统的可靠性和运行效率。
它在航空航天、汽车工程、工业生产和电力工程等领域都有着广泛的应用。
随着科技的进步和工程技术的发展,钢丝绳解耦机构将在更多领域发挥重要作用,为人们的生活和工作带来更多便利和舒适。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
稳 定 平 台钢 丝绳 传 动 结构 振 动 分 析
胡 恒 松 朱 岩 峰 赵 桂 瑾
(中国 空 空 导 弹 研 究 院 ) 摘 要 稳 定平 台传动 系统的振动特 性直接 影响平 台结 构性 能 ,进 而影响伺服 系统 的工作可靠性 。本文运 用有限元模 态分析理 论 ,对平 台铜丝绳传动 系统 的振动特 性进 行 了理论分析 ,抽取建立 了分析模型 ,计算 出了低 阶模 态,并进行 了试验验证。 同时,本文 还 对影 响 平 台性 能 的低 阶模 态提 出 了改进 措 施 。 关键词 稳 定平 台 钢丝绳传动 振 动模 态 有限元 稳定平台工作 时 , 伺服控制 系统 以机械 量 ( 位置 、速 度、加速 度 等) 为控制对象,要求系统 响应平稳 、 快速而 准确。当力矩器驱动 台 ( ) 2 钢丝绳 自 的横幅振动 。钢丝绳 因其 纵向刚度 引起传 动系 身 统扭转振 动 ,其 自身横 幅振 动问题 也可能对系统造成影响。其横幅振 动可 以看作弦 ( 长径 比足够 大 )的横 向振动 问题 。依据 弦理论 ,设弦
J+
a = , = 时 ,系统为无阻尼 自由振动 : ) 当C O O
-
M xt十 C =0 ( Kxt 1 )
此方程有解 :
某型稳定平 台方位轴框架采用了一套钢丝绳组传动 系统 ,该传动
q= 丽
其中 K,M 为系统第i 主刚度 ,主质 量 。由此 可见 ,系统 固有 i ; 阶 频 率由K 及M决定。 b当C O ) = 时,引入外激励 F ,系统 变为无阻尼受迫振动 : 0 e
体运动时 , 转轴扭转刚度 、传动系统弹性变形等 因素使结构具有多阶 固有频率。除上述线性因素外 ,固有频率还与 系统阻 尼、装配 间隙等 非线性因素密切相关 。一般情况下 ,当力矩器 与负载 同轴安装 ,传动 刚度取决于轴及轴连接的扭转刚度 ,设计简单可控 ,结构的 固有频率 值一般远在控制带宽外 ,系统发生谐振的可能性较小 。然而 ,随着平 台控制精度和响应快速性等系统指标的不断提高 ,伺服控制带宽相应
s ot i a n
:
O
须进行 合理设计以满足指标要求。同时 ,相对于同轴驱动方式 ,钢丝 绳组往往具有较低的传动刚度 , 能使传 动系统 的固有 频率落入 控制 可 带宽 中,从而产生回路震荡 ,影响系统正常工作 。
1 钢 丝 绳振 动 理 论 分 析
其 固有频率 : _ ( l i _ —a i t r
M xt+Kxt =Fe“ () () oi
系统由一对定滑轮组成 ,上下滑轮分别连接负载框架和驱动 电机 ,滑 轮 问通过两根钢丝绳实现有限转角传动。为 保证伺服系统工作稳定可 靠, 需要对这套传动系统 低频扭转振动特性进行分析 。
( ) 1 有限元模 型抽 象与计算 。由于实际结 构比较复杂 ,建模时 考虑 影响振型的几个主要因素 ( 和 ),力求其 物理原型准确 ,对 关键参数精度要求较高 。 框架采用se -维 面单元 建立 ,厚度 、材料等参数按 实物 ;台体 hl " l 用高 刚度梁b a em单元和质 量mas 单元精 确模拟其 质量和 绕各 回转 s点 轴的转动惯量 ;电机和配重用mas s点单元模拟其质 量和相对转轴 的转 动惯量 ;轴承采用多点约束MP 单元 ,释放 其转轴的转 动 自由度模拟 C 轴承转动和力的传递 ;在线弹性范围内 ,只要钢丝终 中的张 力保证钢 丝绳被拉 紧 ,其张力 的大小与 钢丝绳拉伸 刚度无关 ,用拉升杆rd o 单 元模拟钢丝绳刚度属性 ,约束钢丝绳轴 向拉伸方 向 自由度模拟其在轮 槽 中的运 动。模 型示意图如下 图2:
( ) 1 钢丝绳组传动系统振动分析。一般系统的动力学方程 为 :
M xt+ (+ xt=Fe ( cxt K ( ) ) ) 口’ “
时外界扰动或栽荷 的广义激励振幅 , m为激励频 率。 )
( ) 1
如果 钢丝绳长径比不够大 ,需考虑钢丝绳抗弯刚度 ,则其
( 中 ,M 为 系统 质 量 矩 阵 ,C为 阻 尼 矩 阵 ,K为刚 度 矩 阵 ,F为 受迫 振 动 其 ^
的线密度为 ,横 向挠度yx) (,为小量 ,振动过程 中张力F t 的变化 可忽 略 ,如图 1 : 示 对长度为 出 的微元体 ,依据 = 可列出下方程 :
出 =, 出
将 = / 代入方程得 :
二横 的二
其中n √ : , 利用分 离变量法 求解此波动 方程, 得:
设系统固有频率 皑, 此方程有解 : x ) 4s ( + ) ∞ ( + + T 1 。 ( + ) ( = n , i 纯r + 她f - = i f. - n
变大。同时 ,受平台框架角指标要求及结构上的限制 ,当力矩器无法 实现 同轴驱动时 ,需要通过传动系统传递力矩 。当传动系统的固有频 率接近或落入控制带宽中 ,系统将产 生振 荡 ,无法正常工作。因此 , 平 台伺服控制带宽受到结构固有频 率的限制。钢丝绳传动具有简捷高 效 的特点 ,在工程中的应用灵活度较 高。当其应用在伺服控制系统中 时,钢丝绳安装形式 、张力等因素将 影响力矩的传动效 率及精度 ,必
,
2 …)
对 于某 型稳 定平 台使 用 的钢丝绳 ,长 9 . m,直径0 m 05 m . m,可 8 以近似按 弦理论 计算其横幅振频 。其线密度 p 3 5 l- gm, A= . x O K / 0 计算得  ̄=6 . F 卢q2 io√ 。绳 中张力F 10 qi26 , , ) 0 , ix 8 √ =【 1 =0N,一阶固有频 率flOH ,远高于 系统带 宽。 =OO z