一种虹膜内外轮廓检测方法
基于轮廓跟踪的虹膜定位算法
虹 膜是 位 于瞳孔 和 巩膜 问 的环状 区 域.虹膜 表 面有 许 多腺 窝 、皱 褶 、色 素斑 等纹 理 信 息 ,这些 纹
理 的稳 定性 、唯一 性 和 防伪 性使 虹 膜识 别技 术成 为 生物 信息 安 全 认证 的重 要 途径 .典 型 的虹 膜 识 别 系 统 主要 涉 及虹膜 采 集 、 预处 理 、 特征 提取 、 征识 别 4个过 程 。 .虹 膜定 位是 通 过检测 虹 膜 内 、外轮廓 特 。 确定 虹 膜在 图像 中的 区域位 置 , 其作 为 虹膜 预处 理 过程 中 的重要 环节 直 接影 响特 征 提取 甚 至 特 征 编码 的有效性 和 准确 性 , 而决 定 虹膜识 别 的性 能 . 进
t p e n c ur c he s e d a d a c a y,a d i u t e r t b e n sf rh r mo e sa l . Key wor ds:ii e o n to rs r c g iin;ii o a ia in;c n o r flo ng rs l c l to z o tu o lwi
I i c l a i n Al o ih s d o n o r Fo l wi r s Lo a i to g r t m Ba e n Co t u l z o ng
LI Yua n n U n— i g,HU ng x n Zo — i g,ZHU a — o g,HE i Xio d n Fe
ag rt m mpr v d t e lt e a c u a y o rsl c lz to lo h i i o e he r a—i nd a c r c fii o a ia in. Fisl m r ty,t e a g rt m c n h n tb n r h l o h s a st e i pu i a y i ii m a e t fn u t e sa t on f t e o tur Th n a tr e i s f p o e u e o o tu n i g, rsi g o i d o t h tr p it o h c n o . e f a s re o r c d r s f c n o r f d n e i
一种快速的虹膜定位算法
b u d r on —e u n e r x r ce .S mi r o n a p i ts q e c swe e e t t d i l l h u e ice c n b t d b h e s s u r t o y a a y,t e o t rcr l a ef t y t e l a t q a e meh d i e a a t x e me t l e u t s o h t h t o a v r o h y ls e n y l c l so tls .E p r n a s l h w t a e meh d c n o e c me t e e e a h sa d e ei o cu in,a d as i r s t d n lo
A s rs Lo a i a i n M e h d Fa t I i c l to t o z
C E i ,WA G S -n , I i —u , A e, HO h ng a g H NQa n N uj g LU X a h a G O L i Z U C u —un i o
lc lz t n.On lc t g t n e o n a y o rs,a mp o e r c ng a g rt m s i to u e o o t i o aia i o o ai he i n rb u d r fii n n i r v d ta ki lo ih wa n r d c d t b a n
第4 9卷
第 6期
吉 林 大 学 学 报 (理 学 版 )
Junl f inU i r t S i c d i ) ora o Ji nv sy( c neE io l ei e tn
Vo. No 6 149 . NO 2 V 011
轮廓度测试方法

轮廓度测试方法嘿,咱今儿个就来唠唠轮廓度测试方法!你说这轮廓度啊,就好比是给一个东西画个精准的画像,得把它的边边角角都给弄得清清楚楚明明白白的。
想象一下,你要测试一个奇形怪状的零件,那可不得有专门的法子嘛!首先呢,就是用那些个精密的测量工具,就像孙悟空的火眼金睛一样,一点一点地去瞄,去量。
这可不是随随便便就能搞定的事儿,得细心,得耐心,要是一马虎,那可就全白搭啦!然后呢,还有一种方法是通过对比标准模型来测试。
这就好像你有个完美的模板在那,你把要测的东西往跟前一放,看看哪儿不一样,哪儿多了,哪儿少了。
这多直观啊!就跟照镜子似的,一下子就能看出差别来。
还有啊,现在科技这么发达,还有一些高科技的测试手段呢!什么激光扫描啦,什么三维成像啦,听着就很厉害的样子。
这些方法就像是给轮廓度测试开了外挂,能把那些细微的差别都给揪出来。
咱再说说这测试的时候得注意啥。
你可别小瞧了这些细节,有时候一个不小心,就会前功尽弃。
比如说测量的时候手得稳吧,不能抖来抖去的,不然测出来的能准吗?还有啊,环境也很重要,不能在那乱糟糟的地方测,得找个安静、干净的地儿。
你说这轮廓度测试重要不?那当然重要啦!要是轮廓度没测好,那做出来的东西能合格吗?不合格的话不就浪费材料浪费时间啦!这可不行,咱得把好关,不能让那些次品流出去。
总之呢,轮廓度测试方法有很多种,每种都有它的特点和适用场合。
咱得根据实际情况选择合适的方法,就像医生看病似的,对症下药。
而且啊,不管用哪种方法,都得认真、仔细,不能有半点马虎。
这样才能保证测试结果的准确性,才能让我们做出高质量的产品。
你说是不是这个理儿?。
基于梯度极值的虹膜卷缩轮检测方法

、 , o 1 . 4 0
NO. 2
计
算
机
工
程
2 0 1 4年 2月
F e b r ua r y 2 01 4
Co mp u t e r En -
文章编号: 1 0 o 0 — 3 4 2 8 ( 2 0 1 4 ) 0 2 —0 1 6 2 —0 4 文献标识码: A
o r i g i n a l g r a y i ma g e . E x p e r i me n t a l r e s u l t s s h o w t h a t t h e l o c a t i o n a c c u r a c y o f t h i s me t h o d c a n r e a c h 9 2 . 5 %. a n d i t h a s a g o o d e f e c t i n t h e i is r
值 的虹 膜卷 缩轮 检测 方法 。根 据 虹膜 图像 中卷 缩轮 及其 附近 区域 在 竖直 方 向上 的灰度 差 异性 ,在 部分 归一 化 图像 中 ,利 用改进 的
垂直梯度算子对图像进行处理,提取竖直方向上的梯度极值点得到卷缩轮轮廓,并将轮廓点还原显示在原始灰度 图像 中。实验 结果表 明,该方法 的定位准确率可以达到 9 2 . 5 %,具 有较 好的检测效果 。
( 1 . C o m p u t e r y i s i o n G r o u p , S h e n y a n g U n i v e r s i t y o f T e c h n o l o g y , S h e n y a n g 1 1 0 8 7 0 , C h i n a ;
一种快速有效的虹膜图像预处理方法

灰 度形 态学 中用b 开启 记 为I・ ,定 义 为 b
I b= ( o6 0 ・ , ) b
为解 决这 些 问题 , 算 法 首先 对 虹膜 图像 采 本 用 数 学形态 学进 行 处理 ,大 量减 少 了边 缘 图像 中 非虹 膜边缘 点 数 ,从而 缩短 定位 的时 问;然 后采
库 的 实验 结 果显 示 ,提 出的虹膜 图像 预处 理 方法 准确 快速 , 能合 理有 效去 除 眼睑 和睫 毛。
关
键
词 : 图像 预 处理 ;数 学形 态 学;虹 膜 定位 ; 眼睑检 测 ;眼毛检 测
文 章 编 号 :2 9 .0 X(0 20 —0 30 0 53 2 2 1)40 9 .5
中 图分类 号 :T 9 . P3 1 4
文献标 识码 :A
A a ta f e tvem e ho fi i m a epr pr c s i f s nd e f c i t d o si g e o e sng r
G o g J nh , Che i i g, Ta g Y o gq , Hua g Fe g n u ui nA pn n n i n n
K e o ds m a e p e oc s i g;m a h m a ia or ho o y;ii o a in;e e i t ci n; y w r :i g r pr e sn te tc lm p l g rsl c to y ld dee to e e a hdee to y ls tcin
用 结 构元 素 b 虹膜 图像 行 灰 度腐 蚀 记 对 进
为 6 ,其 定义 为
虹 膜识 别 的准确 性 ; 3 虹 膜 内外边 界都 具有 较好 的 圆环 特性 , ) 因 此传 统 的虹 膜 定位 算 法 都 是 采 用 圆 形检 测 算
一种新颖的虹膜图像预处理方法
一种新颖的虹膜图像预处理方法
苑玮琦;白晓光;冯琪
【期刊名称】《光电工程》
【年(卷),期】2009(036)004
【摘要】本文提出了一种新颖的虹膜图像预处理方法,该方法打破了传统的定位思想,并且将噪声检测的过程由空间域转到频域来完成.首先,在原始图像上填充瞳孔内的光斑;其次,将人眼图像展开成矩形,在矩形图像上以点线检测代替传统的圆检测确定虹膜的内外边界,并进行归一化;最后在归一化后的虹膜图像上利用2D-Galbor滤波器的方向选择性检测眼毛和眼睑,标记干扰区域.实验证明,该方法可以解决内边界不是理想圆造成的瞳孔遗留或纹理损失问题,而且显著降低了虹膜定位时间,提高了虹膜识别的准确性.
【总页数】7页(P133-139)
【作者】苑玮琦;白晓光;冯琪
【作者单位】沈阳工业大学,视觉检测技术研究所,沈阳,110178;沈阳工业大学,视觉检测技术研究所,沈阳,110178;沈阳工业大学,视觉检测技术研究所,沈阳,110178【正文语种】中文
【中图分类】TP391.41
【相关文献】
1.一种快速有效的虹膜图像预处理方法 [J], 龚军辉;陈爱萍;唐勇奇;黄峰
2.一种快速有效的虹膜图像预处理方法 [J], 龚军辉;陈爱萍;唐勇奇;黄峰
3.一种新的虹膜图像预处理眼睑定位算法 [J], 岳学东;刘洋
4.一种新颖的虹膜图像噪声检测方法 [J], 雷浩鹏;李峰
5.一种新颖的虹膜图像预处理算法 [J], 姚鹏;叶学义;庄镇泉;吴亮;龙飞;李斌
因版权原因,仅展示原文概要,查看原文内容请购买。
基于DSP的虹膜识别系统的实现
总第254期2010年第12期计算机与数字工程C om put er8。
D i gi t al Engi nee r i ngV01.38N o.12112基于D SP的虹膜识别系统的实现。
柯辉尉宇(武汉科技大学信息科学与工程学院武汉430081)摘要提出基于T M S320C6713b浮点型D SP的虹膜识别硬件系统设计,以模块化的方式详细介绍了各个部分的结构、功能、工作原理等设计内容。
对归一化的虹膜图像采用2D-G abor滤波器的虹膜算法实现对虹膜特征的提取,通过比较海明码距完成特征匹配。
实验结果表明,该系统能高效、稳定的工作,具有较高的识别率,效果良好。
关键词虹膜识别;D SP2D-G abo r滤波器;特征提取中图分类号TP391.41I m pl em ent at i on of I r i s R ecogni t i on Sys t em B as ed on D S PK e H U i W ei Y u(Col l ege O f I nf or m a t i on Sc i enc e and Engi neer i ng,W uhan U ni ver s i t y of S c i e nce and Techno l ogy,W uhan430081)A bs t ra ct A n i ri s r ec ogni t i on s y s t em i s pr es ent ed bas ed o n f l oat i ng-poi nt D SP T M S3200C6713b.E v er y s ys t em m od ul e’S con st i t ut i on.f unct i on and pr i nci pl e ar e di scusse d i n det ai l.I n or der t O ext r act i ri s ch ar ac t er,an i r i s r ec ogni t i on al—gor i t hm ba se d2D-G abor f i l t e r f or nor m a l i za t i on i m age s i s proposed.Thr ough c om pa ri ng t he ham m i ng di st a nce t O r eal i ze fea—t u r e m at ch.E xper i m ent r esul t s s how t hat t h i s s ys t em c an r un ef f i cient l y and st a bi l i t y,w hi ch has hi ghe r r ec ogni t i on ac cur ac y and go od ef fect.K eyW or ds i ri s r ec o gni t i o n,D S P,2D-G abo r f i l t er,f eat ur e ext r act i onC l as s N um be r TP391.411己I言_L J1日随着社会经济的快速发展,身份识别越来越受到重视,特别是生物识别技术受到了广大科技人员的青睐。
一种虹膜定位算法
中图法分 类号
An I i c to g r t m r s Lo a i n Al o i h
W a g Ch n r Hu Z e g ig Lin Qi s e g n egu h n pn a u hn
( nt ueo ma ePrc s n ,Y n h n Unv ri ,Qih a g a 0 6 0 ) I s t t f I g oes g a s a iest i i y nun do 6 0 4
s m e r e t r nd e ge de e to r ym t y f a u e a d t c i n f om a c l m a spr s n e gr y s ae i gei e e t d. Bas d o t si a,t e i pr e e n hi de h m ov d Sob ld — e e
c er,t n he ii nt ror a ent he t rs i e i nd ext ror r d ia e de e t d by u i g r di s ogr m oug r ns o m . Re uls e i a i r t c e s n a us hit a ofH h ta fr s t s how ha he m e h a m pr t t t t od c n i ove l a i n s e nd i oc to pe d a s nots nstve t oie efe t e ii o n s f c .
Ke r ii o aton,ii d ntfc to , ice de e t y wo ds rs l c i rsi e iia in cr l t c or, ou r H gh tansor f m
基于结构与边缘分布范围双约束的虹膜定位

膜 图像 , 并进 行粗 定 位 , 后 利 用 这 两 种 方 法 进 行 精 确 定 位 , 然 从 而 大 大 提 高 虹 膜 识 别 系 统 的 实 时 性 , 当存 在 眼 睑 、 毛 但 睫
测) 然后确定二值化 闯值得到包含瞳孔 的连通 区域 , 图像 , 对 进行形态学填充 、 腐蚀 和膨胀 等操作 , 而利用 该 区域 的灰 进 度信息精确 瞳孔 区域 , 最后对其下边缘边界点采 用最小二乘
法 圆 拟合 。具 体 实 现 步 骤 如 下 : 1 )光 斑 检 测 。 通 常 情 况 下 光 斑 的பைடு நூலகம்亮 度 比 虹 膜 图像 其 它
等于扰时 , 这些算 法定 位结果存 在一定 偏差。另外文 献 [ ] 6 中在极坐标下的矩形图像 中确定虹 膜边界 , 种方法思路新 这
颖, 对虹 膜 中心 定 位 准 确 性 要 求 较 高 ; 文献 [ ] 7 中提 出基 于最
第3 2卷
第 3期
四 川 兵 工 学 报
2 1 年 3月 01
【 自动化技 术 】
基 于 结 构 与 边 缘 分 布 范 围双 约 束 的 虹 膜 定 位
胡 正 平 , 丽华 , 明 玉 , 季辉 王 侯 李
( 1大 学 信 息 科 学 与 程 学 院 , 北 索 岛 燕 I 』 1 河 06 0 ) 6 04
基于形态学方法的虹膜快速定位算法

的虹膜 图像 质量 的不确 定性 ,上 述算 法都 有一 定 的适 用 范 围 , 圆梯 度算 子 定位 精 度高 , 不受 二值 化 阈值 的影 响 , 点是 容 且 缺
易受 到局部 光 源 的影响 ; u h变 换 与最 小二 乘法 都是 基 于二 Ho g 值化 边界点 的定 位方 法 , 前提是 必须 将边 界点 与非 边界 点 区 其 分开 来 ,否则 不能 精确 定位 , o g H u h变换 方法 存在 实 时性 差 的 问题 , 最小 二乘法 由于是 拟合方 法 , 而 定位 速 度较快 , 其 精度 但 不如 圆梯 度 算子 和 H uh变换 方 法 高 ; og 当图像 质 量 不高 时 , 基 于几 何特征 的定 位方 法 与主动 轮廓 线法 定位 精度 急剧下 降 。 针 对 以上 算法 的局 限 . 多文献 提 出 了粗 定位 与精 定位相 结合 的 许 方法 , 既保 证 了定位 精度 , 提高 了定 位速 度 。 文利 用 阈值 对 也 本
位算 法都 是采用 圆形 检测 算子 定位 虹膜 内外 边缘 。 典 虹膜定 经
位 方 法 主 要 有 Jh ag a o n D u m n提 出 的 圆 梯 度 算 子 。 ih r R c ad
虹 膜 图像 中存在 一定 的 图像 噪声 ,为 保证 本算 法 的定位 精度 . 必 须去 除虹 膜边 界带 上 的噪声 , 样使虹 膜 图像 的 内外边 界上 这 尽 可 能多 的像 素点 的灰度 值趋 于一 致 。 时又不 至于 消除 内外 同
t H
G y: )
I,
e
作者简 介 : 炜 (9 0 ) 男 , 魏 1 8 一 , 江苏徐 州人 , 东南大 学在 读硕 士研 究 生 , 苏州卫 生职 业技 术 学院信 息 中心教 师 , 究方 向 为软件 工程 、 研 网络安 全 ; 周俊 (9 1 , , 1 8 一) 男 江西丰城 人 , 硕士 , 勤工程 学院在读 博 士研 究生 , 究 方向 为后 勤信 息化和信 息安 全 。 后 研
关于虹膜识别方法的课程大作业

用户较少配合情况下的虹膜识别方法研究用户较少配合情况下的虹膜识别技术具有易于市场推广、方便快捷等优点,已成为虹膜识别技术的发展趋势。
由于眼睑遮挡、运动模糊、高亮点等多种干扰和噪声影响,非理想条件下采集的虹膜图像中虹膜通常不是完整的,模糊或发生形变。
这种情况下的虹膜识别具有很高的挑战性。
本文首先阐述了在CASIA—IrisV4虹膜数据库中的虹膜定位方法。
该方法二值化虹膜图像保留瞳孔高亮点信息,并通过横纵向投影初步确定瞳孔位置。
然后在限定范围内采用Canny边缘检测和圆Hough变换拟合虹膜内外轮廓。
用户较少配合情况下虹膜识别技术研究背景虹膜表面高低不平,有许多皱纹、凹陷、条纹、斑点以及隐窝等细节特征,包含丰富的纹理信息。
正常情况下,虹膜纹理一旦形成,终生不变。
人眼立体机构中,虹膜位于角膜之后;水晶体之前。
虹膜有天然的保护膜。
虹膜纹理极少因意外伤害被破坏,亦不会磨损。
人为改变虹膜纹理几乎不可行,还有失明的危险。
此外,因光照不同瞳孔的大小发生变化是检测虹膜活体组织的显著特征。
这些生理特点为虹膜成为身份认证生物特征提供了生理学理论依据。
但是,现有的虹膜识别系统要求用户高度配合,即在特定光照条件下,虹膜采集仪与人眼的距离在固定范围内,并且用户视线直视虹膜采集设备等条件下进行虹膜采集。
有的虹膜识别系统甚至在虹膜识别之前,需要教授用户如何才能让虹膜采集仪获取适合的虹膜图像,使得虹膜识虹膜图像别系统正常工作。
这一过程不仅耗时而且枯燥,反复采集虹膜图像使用户感到厌烦,因此,用户较少配合情况下的虹膜识别技术的呼声越来越高。
虹膜图像预处理较少配合情况下,在降质虹膜图像中提取的虹膜特征的分类表征能力不理想。
虹膜识别中的预处理算法的性能准确性尤为关键,直接影响虹膜匹配的准确性。
虹膜识别流程虹膜识别主要分三个阶段:虹膜图像采集、虹膜图像预处理和虹膜特征提取与匹配。
每个阶段对最终的识别效果的影响都至关重要。
首先,虹膜采集得到虹膜图像。
虹膜图像归一化及特征提取

虹膜图像归一化及特征提取3.1 虹膜纹理归一化由于拍摄环境等条件的改变,摄取的每张虹膜图片的位置与大小都可能会发生变化,所引起的虹膜的平移、缩放和旋转都会对虹膜识别造成影响,而人的瞳孔也会因外界环境而缩放。
为了消除这些影响,将每幅原始图像调整到相同的尺寸和对应位置,实现精确的匹配,就必须对虹膜进行归一化。
因为虹膜内外边界都近似为圆形,因此可以用几何的方法归一化。
通常的虹膜识别算法都假定外界光照不发生变化或者外界环境可控制,所以瞳孔的缩放可忽略不计,或简化为线性形变。
在John Daugman系统中,提出了弹性片模型,认为虹膜区域可以任意拉伸或者压缩,总可以通过拉伸(压缩)将圆环区域变为矩形区域—即极坐标表示的矩形区域。
在Wildes系统中,通过采集图像和数据库图像的缩放、旋转变换进行特征区域配准,然后注册图像。
在Boles系统中,为了使两幅虹膜图像可以比较,将一幅虹膜图像作为参考,将另一幅虹膜图像缩放为同样半径大小,这一规范化只在匹配时进行,而不是为了将来的匹配而存储同一大小的虹膜特征模板。
无论哪种情况,只要进行模式比对,必须要把不同分辨率的虹膜区域转化为相同分辨率的虹膜区域。
3.1.1 平移虹膜平移是指虹膜位置在实际捕捉到的图像中的位置是不固定的,总是存在相对的位置变化。
分析造成虹膜区域在图像中位置相对平移的原因,主要是拍摄时采集设备位置与人眼的位置存在光轴不重合,导致了图像采集中虹膜位置发生偏离图像中心位置。
平移变化只能改变虹膜在图像中的位置,对于这一变化总可以通过坐标的平移将虹膜的中心平移到图像的中心位置,其特征不会发生变化,因此说虹膜特征是平移不变的。
3.1.2 旋转虹膜旋转是指采集设备和虹膜所在的两个平面发生了相对的角度旋转变化,导致采集的不同虹膜图像发生了相对的旋转变化。
造成虹膜图像发生旋转的原因是:(1)头部倾斜(或采集设备倾斜);(2)眼球在眼眶的转动。
3.1.3 伸缩虹膜的伸缩变化是指图像中虹膜面积大小的变化。
采用Hough变换定位出虹膜内外边缘的圆心和半径
采用Hough 变换定位出虹膜内外边缘的圆心和半径虹膜包含纹理的部分是内外两个近似圆形边界之间的部分,虹膜的内侧与瞳孔相邻,外侧与眼白相邻,这两个圆不是完全同心的,需要分别对内外两个边界进行处理。
目前国内外提出了不少的虹膜定位算法。
在此具体研究基于Hough 变换的虹膜定位算法。
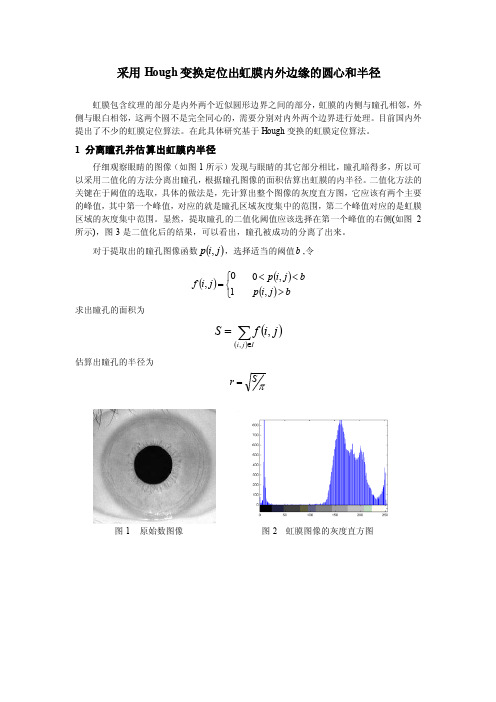
1 分离瞳孔并估算出虹膜内半径仔细观察眼睛的图像(如图1所示)发现与眼睛的其它部分相比,瞳孔暗得多,所以可以采用二值化的方法分离出瞳孔,根据瞳孔图像的面积估算出虹膜的内半径。
二值化方法的关键在于阈值的选取,具体的做法是,先计算出整个图像的灰度直方图,它应该有两个主要的峰值,其中第一个峰值,对应的就是瞳孔区域灰度集中的范围,第二个峰值对应的是虹膜区域的灰度集中范围。
显然,提取瞳孔的二值化阈值应该选择在第一个峰值的右侧(如图2所示),图3是二值化后的结果,可以看出,瞳孔被成功的分离了出来。
对于提取出的瞳孔图像函数()j i p ,,选择适当的阈值b ,令()⎩⎨⎧=10,j i f ()()b j i p b j i p ><<,,0 求出瞳孔的面积为()()∑∈=Ij i j i f S ,, 估算出瞳孔的半径为 πSr =图1 原始数图像 图2 虹膜图像的灰度直方图图3 二值化方法定位瞳孔2 采用改进的Hough 变换算法定位出虹膜内外边缘(一)Hough 变换的原理Hough 变换的实质是将图像空间的具有一定关系的像元进行聚类,寻找能把这些像元用某一解析形式联系起来的参数空间累积对应点。
采用Hough 变换检测任意曲线的原理如下:假设()y x a a f a n n ,,,...,11-= (1)为需检测曲线的参数方程,式中n a a , ... ,1为形状参数,y x ,为空间域的图像点坐标,对于图像空间的任意点()00,y x ,利用(1)式可将其变换为参数空间()n a a ,...,1中的一条曲线。
一种新颖的眼睛状态识别方法

积 分投 影 ,从而 确定 出虹膜 区域 的轮 廓线 .再 在
所 确定 的虹膜 区域使用 H u h o g 变换来 检测 虹膜 。
息 ( 眼 睑闭合 程 度 或 眨 动速 率 等)可作 为 监 测 如 的对 象 ,故 可结 合 驾 驶员 驾 驶 时 的特 点 和规 律 ,
对驾驶 员疲 劳驾 驶 进行检 测 和预警 。其 中 ,人 眼 状态 信息 识别 是一 个关键 技 术 ,为此 ,本 文提 出
一
种新 颖 的 眼睛状 态识别 方法 。该 方 法先 通过 是 的眼部 可变形 模板 的参 数 中上下 眼 睑的宽 度来 进
大提 高眼部状 态的识 别精度
关键 词 :疲 劳驾驶 ;虹膜 ;可 变形模 板 ;眼睑 ;眼 睛状 态识 别
0 引 言
据 世界 卫生 组织 的统 计报 告显 示 ,全世 界 每
在检 测 虹膜前 .一 般需 要快 速定 位 出虹膜 区
域 。 由于虹 膜 区域 的灰 度值 和 眼部其 他 区域 的灰 度 值相 差较 大 ,因此 ,可 以对人 眼 图像 的灰度 积 年 因道 路交 通事 故造 成 的死亡 ,高 居非 正 常死 亡 原 因之 首 ,道路 交通 事故 已成 为 当今世 界危 及人
种 快捷 准确 的眼 睛 状 态识 别 方 法。该 方 法首 先根 据 是 否检 测 到 虹膜 来判 断是 否 开 眼 .若 没
有 ,再根据 提取 到 的眼部 可 变形模板 的 参数 来计 算上 下眼 睑的 宽度 ,并进 一步判 断 眼睛 的开 闭。 实验表 明 ,眼 睛无论是 处 于 开眼还是 闭眼状 态 ,这 种 方法都有 很好 的识 别 效果 。可 以大
几种虹膜定位算法的分析与比较

几种虹膜定位算法的分析与比较作者:郭巧丽黄健来源:《软件工程师》2010年第05期摘要:本文介绍了离散圆形动态轮廓线法、灰度阈值分割法、圆Hough变换和点Hough变换几种虹膜定位算法,并对各种算法进行了分析和比较。
关键词:虹膜;离散圆形动态轮廓线法;灰度阈值分割法;圆Hough变换;点Hough变换1 引言虹膜定位是虹膜识别处理过程中非常重要的环节,它不仅决定了后续过程能否继续,而且决定了提取特征是否有效,并最终决定虹膜识别结果。
虹膜包含纹理的部分是内外两个近似圆形边界之间的部分,虹膜内侧与瞳孔相邻,外侧与眼白相邻。
但是,这两个圆不是完全同心的[1],需要分别对内外两个边界进行处理。
本文介绍了离散圆形动态轮廓线法、灰度阈值分割法、圆Hough变换和点Hough变换几种虹膜定位算法,并对各种算法进行了分析和比较。
2 离散圆形动态轮廓线法离散圆形动态轮廓线法(DCAC:Discrete Circular Active Contours),这种算法使用了先验的信息和统计学的知识,找出虹膜边界和评定这种方法的成功和失败。
由于瞳孔-虹膜边界是圆形,需要定义一个圆形的动态轮廓线,假定一个开始点,在图像中定位一个圆[2]。
每个顶点用 vi 来表示,内部力Fint,i被定义为:(2.1)是该顶点在完美多边形中的位置。
有如下公式:(2.2)其中Cr表示当前边界的平均半径,C= (Cx,Cy) 是当前的质心,n是节点数,δ是每次迭代中半径的增加值,质心C被定义为:(2.3)平均半径Cr被定义为:(2.4)由图像像素的灰度级提供的图像力把顶点向里推,来平衡轮廓线的内部力。
每个顶点 vi 的外部图像力的方向定义为:(2.5)大小定义为:(2.6)I(vi) 是vi最近顶点的灰度值,这样每个顶点的图像力被定义为:(2.7)如图2所示:轮廓线的运动由内部力和图像力之和决定,因此从t到t+1次迭代顶点运动表示为:(2.8)β是这两种力的权重。
虹膜识别
归一化的目的是将每幅原始图像调整到相同的尺寸和对应 位置,从而消除平移、缩放和旋转对于虹膜识别的影响。 虹膜的内外边界都为圆形,可以简单地利用几何方法归一 化。以瞳孔圆心为起点,与虹膜内外边界的交点坐标分别 为(xp(θ),yp(θ))和(xs(θ),ys(θ)),则利用下式,将虹膜图像 中的每个点一一映射到极坐标(r, θ)中。
虹膜,作为重要的身份鉴别特征— 1. 高独特性:几乎任何两个人(包括双胞胎)的虹膜都是不 完全相同的,即使是同一个人左右眼的虹膜也存在一定的 差异。 2. 高稳定性:虹膜本身一般不易发病,可以保持几十年不 变。 3. 良好的防伪性能:要想精细地修改虹膜的表面结构特征, 即使采用目前先进的眼科手术,也必须冒着视力损伤的危 险。另外,利用虹膜本身有规律的震颤特性以及虹膜随光 强度变化而缩放的特性,可以把假冒的虹膜图片区分开来。 4. 易接受性:可以不与人体接触,甚至能够在人们没有觉 察的情况下把虹膜图像拍摄下来。
虹膜识别的优势
同其它的生物识别技术相比,虹膜识别技术具有非常明 显的优势。
虹膜识别的优势
搜索符合影像的时间短(每秒10万笔虹膜 编码)。 虹膜被人体保护,不易改变(在怀孕第7个 月已经确定)。 具有高独特性,高稳定性,防伪性好,易 使用性。
虹膜识别的不足
虹膜识别技术刚起步,很多方面都有不足: 虹膜纹络是否具有稳定性有待研究。 虹膜采集技术有待提高。 高重复性的虹膜识别算法有待进一步开发。 目标物渺小,以致于有取得目标物的距离限制。 瞳孔、睫毛或多或少会对图像采集造成影响。 天生无法聚焦的人会使得系统运行困难。
二维小波变换:
小波变换是一个常用的图像分析手段,并且在纹理 识别中有较多的应用。一个二维小波变换可以看作两个连 续的一维小波变换。二维小波变换将一幅图像分解成一系 列的低频子图像。小波变换的结果取决于所采用的小波基 的类型,而小波基是由滤波器的类型决定的。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
轮廓检测方法, 用灰度投影方法估计虹膜 内边缘 圆心位置; 使 然后采 用边缘检测方法得到虹膜边 缘 图像 , 用 H uh变换 准 确检 测 虹膜 内轮 廓 ; 使 og 最后 使 用一 维信 号检 测 确 定 虹 膜 外 边缘 点 同 时
使 用 Hog uh变换检 测 虹膜 外轮 廓 . 实验 结果表 明 , 该方 法 能够有 效检 测 出虹 膜 内外轮 廓 .
当前 应 用最 为方便 和 精确 的一种 . 膜识 别技 术被 虹
广泛 认 为是二 十 一世 纪 最具 有 发 展 前 途 的 生物 认
组向量( Y r 作为虹膜边缘 的圆心和半径 , ,, ) 然后 对其 增 加 修 正 因 子 之 后 来 求 虹 膜 的 内半 径. Wi e 提出又一经典算法 , ls d 它采 用边缘检测加 H uh变换 的 方 法 检 测 虹 膜 内外 轮 廓 . o yr4 og B w e【 J
() b
图 7 边缘检测得到虹膜 的边缘 图像
23 H uh . 。g 变换检测虹膜 内边缘
周 c上一 ( y一6) 。::, () 8
在虹膜图像上 , 中心在( ,。 , 径是 的圆 b) 半
根据粗定位 的瞳孔圆心我们可以确定瞳孑 圆 L
第 3期
刘晓敏 , : 等 一种虹膜 内外轮廓检测方法
量 积分算 子 定义 如下 :
M(,( ‘、 a }) , x G f r
r c y J ' ・c
l( 2 虹 膜 内外 轮 廓 检 测 1 )
本文介绍了一种有效 的虹膜 内外轮廓检测方 法, 如图 l 所示 , 首先输入虹膜图像 , 然后框 图项分 别对 轴方向, 轴方 向作灰度投影大致确定瞳孑 Y L 圆心. 接下来进行边缘检测 , 在得到 的边缘图像上 使用 H u h o g 变换检测虹膜 内轮廓. 确定内轮廓后 ,
识别 方法 . 文 提 出了一 种有 效 的虹膜 内外 轮廓 检 本
测方 法 达到 了很 好 的性 能 .
膜识别的准确性. 目前已经有一些成熟的算法检i 贝 0 虹膜内外轮廓 , 但是针对不同数据库不同算法性能
是不一样 的. 最经典 的虹膜 内外轮廓 检测方法是 D uma 出的环量 积 分算 子确 定 虹膜 外 轮 廓 , ag n提 环
43 1
根据内轮廓确定虹膜所在大致 区域 , 在该区域沿着 水平方向扫描虹膜 图像计算它的外轮廓边缘点 , 最 后使 用 Hog uh变换 检测 虹 膜外 轮廓 .
(
输虹 图 入膜像
灰 度投 影 粗 定 位 虹 膜 内轮 廓
二
该算法 利用梯度算子检测虹膜的内边缘点 , 梯度 是 图像处 理 中最 为 常用 的一 次微分 方法. 图 设 像 ,) Y 在点( Y ,)的梯度矢量 为 G [
证技术 , 未来 的安防 , 国防 , 电子商务等多种领域的 应 用也必 然会 以虹膜 识别 技术 为重 点. 种趋 势现 这 在 已经在全球各地的各种应用 中逐渐开始显现出 来, 市场应用前景非常广阔. 然而 , 虹膜内外轮廓检测是虹膜识别技术 中最 重要的一个步骤 , 准确检测虹膜 内外轮廓将保证虹
2 梯度的幅度用 G ,) ) [ Y ]表示 , 由下式 并
(
输检虹 图 出测膜像
图 1 虹膜 内外轮廓检测过程
)
G )=( ( } ( E ][ ) f ( 善+ 5 )
梯度的大小就是 厂 Y 在其最大变化率方向 ( ) , 上的单位距离所增加 的量. 我们知道图像函数, , (
44 1
佳 木 斯 大 学 学 报 (自 然 科 学 版 )
2 1 年 01
输 入 图像
3 3 卷 积 核 *
一
2 O 2
8
8 8
图 4 卷积核
设 原 图像 为
1 1 1 1 1
图 5 原始数据
经 过模 板操 作 后 的 图像 为
,
,…
、2
式 中G r 1 ( )=
,
一(
Zr , O
/ 7r 2r c
) 中心为 r 标 是 o
准差为 的高斯 函数 , 代表卷积 , 代表 中心为 s
( ,。 , Y) 半径为 r 的圆的圆弧 , D um n 的 在 ag a ¨
系统中, x yr 在 ,, 空间中寻求使上述算 子最小的一
关键 词 : 虹 膜识 别 ; 灰度 投 影 ; o g H u h变换 ; 边缘检 测 中图分 类号 : T 3 14 P 9 . 文献 标识 码 : A
l 国内外虹膜 内外轮廓检测发展现状
虹膜识别技术是人体生物识别技术的一种. 在 包括 指纹 在 内 的所 有 生物 识别 技 术 中 , 膜识 别是 虹
摘 要 : 虹膜识别技 术是人体生物识别技术的一种 , 它作为重要 的身份鉴 别特征具有唯一性 , 稳 定性 , 可采 集性 和 非侵 犯 性 等优 点. 脸像 , 音 等 身份 鉴 别 方 法相 比 , 膜 具 有 更 高 的 准确 与 声 虹 性. 而虹膜 内外轮廓提取是虹膜识别技 术不可缺少的关键步骤 . 文章介绍 了一种有效的虹膜 内外
)()的度值 [ ) ( , 在 , 梯幅为( 等】 点 y +)其 T
方r j图过运灵 向【‘ 像梯算敏 口 可 经度能 c 见 留
的检测 出边 界线 . 图像 边缘 提 取 中 , 在 使用 sbl o e算
『 ] - ( )
子检测边缘 , bl s e 梯度算子是先做加权平均, o 然后 再差 分 , 即 A ( ,)= [ f x) , 一1Y+1 , )+2 ( , f Y+1 ) + +1Y+1 ]一[ , ) 一1Y一1 , ) +2 , Y一1 , +1Y一1 ] )+ ( , ) () 6 A ( ,)=[ f xY 一1Y一1 2 ( 一1Y , )+ , ,)
对虹膜外边界的影响. 虹膜以瞳孔圆心为中心分作 左右两个部分 , 先扫描虹膜的左半部分并计算其梯
图 9 虹膜外 轮廓检测示 意图
3 实验 结果 分 析
实验 中使 用 的 计 算 机 C U 主 频 为 2 O G z P .1 H ,
① 收稿 日期 :0 1一o 21 4—0 8 基金项 目: 黑龙江省教育厅 ( 15 4 9 15 18 ).
作者简介 : 晓敏 (90 , , 刘 18 一)女 黑龙江佳木斯人 , 佳木斯大学信息电子技术学院讲师 , 硕士
第 3期
刘晓敏 , : 等 一种虹膜 内外轮廓检测方法
22 边缘 检 测确 定 内轮廓 .
45 1
心( ,) a b 选取的空间范围为 a∈[。 , +s , 一占 ‰ ] b∈ [。 ,o ]对虹膜库 中的虹膜进行统计 Y 一 Y +占 .
的个数 p 则 图像 中瞳孔 的圆心和半径(Pb, 口, r 满足 p , 的值是最大的, p ) 即
p , ,
2 1 灰度投 影 确定 内轮 廓 圆, .
瞳孔的灰度值与其 它部分相 比非常 明显 ( 见 图2 , ) 因此可 以用灰度投影 的方法确定 瞳孔 圆心 的坐标 ( , ) 给定虹膜图像 , . 我们将该 图像向水 平方向和垂直方向分别投影 , 每个方向投影最小值 即为瞳 孔 的圆心 坐标. 假设一幅虹膜输入图像 ,) 其在 方向的 y, 灰度投 影量和在 Y方 向 的灰度 投影量 的分布分别 为
第2 9卷 第 3期
21 年 O 月 01 5
佳 木 斯 大 学 学 报 ( 自 然 科 学 版 ) Ju a o a ui nvrt N trl c neE io ) or l fim sU iesy( a a i c dt n n J i u Se i
V0. 9 No 3 12 .
s ()=∑fx) u x m (, , )
y
() 2
s ()=∑ , u y m , , )
圆心 的坐标 ( ,o. Y)
() 3
求得式 ( ) 2 和式( )的最小值 , 3 即可得到瞳孔
+
一1Y+1 ]一[ , )
+1Y一1 , )
⑥ .
2 ,)+ ( , , ) () 7 sbl o e算子有一定的噪声抑制能力 , 在检测边 缘 时效 果 明显. 过 式 ( )和 式 ( )可 得 到 模 板 通 6 7
对存 在 的虹 膜 分 割 算 法 进 行 了 总 结 . 陈功 等人 使 用 Sb l 子 进 行 边 缘 检 测 之 后 使 用 改 进 的 oe 算 Hog u h变换 获 得 虹 膜 的 内外 边 缘 , 良洲 也 采 陈 用 了 H uh变换 的方 法 . og 叶学 艺 等 人 采 用 小 尺
Ma y 2 1 01
文章编号 : 0 10 (0 1 0 — 4 2 0 1 8— 4 2 2 1 )3 0 1 - 5 0
一
种 虹 膜 内外轮 廓 检 测 方 法①
刘 晓敏 张 , 思 李川汇。 高 晶 , ,
1佳木斯大学信息电子技术学院. . 黑龙江 佳木斯 140 ;. 5072吉林大学通信工程学院. 吉林 长春 100 ;. 3003 佳木斯大学应用技术学院。 黑龙江 佳木斯 140 507
度高斯低通滤波器对 图像滤波之后采用 直方 图投 票的方式先提取外边 缘然后 提取 内边缘. 陈颖 等 人 提 出粗定位虹膜 内轮廓 , 再精确定位虹膜 内 外轮廓. 张立云等人u 还提 出对虹膜图像质量进 行评价以便得到更好 的识别效果. 对于质量较高的 虹膜 图像, 以上方法能够较好完成虹膜 内外轮廓检 测, 但是对 于 低质 量 虹膜 图像 还需 要更 有效 的虹膜
_ 厂 、 \
图2 虹膜图像灰度投影示意 图
[量 [ 2]里忽 三 _ . 采 ] _ 这用 或 0 0 在