中间位置转向试验和评价指标
汽车低速转向回正试验测试及评价

值按下式确定:
式中:t s为三次试验稳定时间均值,
的稳定时间,s。
②残留横摆角速度。
上,松开转向盘3s
汽车回正性能越好,
式中:Δr为三次试验残留横摆角速度均值,
i次的残留横摆角度,
③横摆角速度超调量。
线上响应的第一个峰值超过稳态值的部分与初始值之比;横摆角速度均值按下式确定:
式中:σ为三次试验横摆角速度超调量均值,
次试验横摆角速度超调量,
④横摆角速度总方差:
设备图片由下式确定:
式中:E ri为第i次试验横摆角速度总方差,
摆角速度时间历程曲线瞬时值,(
应初始值,(°)/s;n为采样点数;Δt
2s。
2.2测试设备简介
为满足试验标准规定及测试精度,
图4低速转向回正试验的试验结果(d)侧向加速度试验曲线(右转)(f)横摆角速度试验曲线(右转)(b)方向盘转角试验曲线(左转)
(a)侧向加速度初始曲线(左转)(c)横摆角速度试验曲线(左转)(e)方向盘转角试验曲线(右转)
①残留横摆角速度绝对值Δr的评价分数:
②残留横摆角速度总方差E的评价分数:低速转向回正性试验的综合评价分数为:则该试验车低速转向回正试验项目评分如表。
C-NCAP 评分方法

得分 0~5 0~2 0~5 0~2 0~2
总体罚分 最高限定 为4 分
总分 0~16
内部资料
第 3 页 共 11 页
4 前部偏置可变形壁障碰撞评估
4.1 标准和限值
在前部偏置可变形壁障碰撞中,可以得到的最高分数为 16 分,评分部位为假人的头颈部位、 胸部、膝盖、大腿、骨盆部位和小腿、脚及脚踝部位,每个部位最高得分分别为 4 分、4 分、4 分和 4 分。
减去 1 分。
碰 撞 试 验 后 ,若 燃 油 供 给 系 统 存 在 液 体 连 续 泄 漏
且在碰撞后前 5 分钟平均泄漏速率超过
30g/min,则减去 2 分。
0~4 0~4 0~4 0~4
总体罚分 最高限定 为4 分
0~16
5 侧面可变形移动壁障碰撞评估
5.1 标准和限值
在侧面可变形移动壁障碰撞中,可以得到的最高分数为 16 分,评分部位为假人的头部、胸部、 腹部和骨盆,每个部位最高得分分别为 4 分、4 分、4 分和 4 分。
剪切力FX
1.9kN@0ms
2
1.2kN@25~35ms
2
1.1kN@45ms
2
张力FZ
2.7kN@0ms
2
2.3kN@35ms
2
1.1kN@60ms
2
伸张弯矩My
42Nm
2
3.1kN@0ms
0
剪切力FX
1.5kN@25~35ms
0
1.1kN@45ms
0
3.3kN@0ms
0
张力FZ
2.9kN@35ms
CHINA NEW CAR ASSESSMENT PROGRAMME
(C-NCAP) 评分方法
主观评价_转向性能

直道行驶的转向特性
项目
7.3.2响 应特性
行驶轨迹变化
车辆在稳定直线 行驶状态下,施 加正弦或者无规 则转向输入。转 角幅度从很小开 始逐渐增大,直 到车身产生明显 侧向运动。改变 车速后重复该工 况
速度范围
30km/h到 最高车速
评价内容
研发目标
车辆为保持行 驶路线采取的 转向动作,其 产生的车身响 应
转向回正的运 动学设计(主销 后倾、主销内倾)
轮胎特性(车轮 和轮胎尺寸,特 征参数,如轮胎 侧偏刚度等)
直道行驶的转向特性
项目 行驶轨迹变化 速度范围 评价内容
研发目标 影响因素
7.3.4转 向中位 感觉
车辆在不同车速 下保持直线行驶 状态,使车辆轻 微转向,以获得 最小的行驶路线 改变(根据车速 的不同,方向盘 转角介于3-10度 之间)。方向盘 在转动后首先会 回正。在其它行 驶工况中也将撒 手松开方向盘
0.00
Lateral Acceleration (g)
N300 Coil Initial Design (Design Mass, PAS) Optimised Coil Sprung (PAS) Optimised Coil Sprung (NO PAS)
Target (Design Mass) Suzuki APV (Design Mass) N300 Coil Initial Design (Design Mass, No PAS)
车辆应该自 发且线性的 对转向输入 做出响应。 时间和相位 延迟或车辆 的过度响应 都应避免
影响因素
静态和动态转向传 动比
伺服转向的转向特 性曲线
侧倾支承(弹簧、 稳定杆、阻尼)
前、后桥的侧倾运 动学
电动助力转向的转向感觉客观综合评价
机 械 工 程 学 报JOURNAL OF MECHANICAL ENGINEERING 第45卷第6期 2009年6月Vol.45 No.6 Jun. 2009DOI :10.3901/JME.2009.06.171电动助力转向的转向感觉客观综合评价*张 昕1 施国标2 林 逸2(1. 北京交通大学机械与电子控制工程学院 北京 100044; 2. 北京理工大学机械与车辆工程学院 北京 100081)摘要:针对电动助力转向 (Electric power steering, EPS)系统进行整车转向感觉主观评价试验,分别对转向轻便性、回正性、中间位置转向和移线性能转向感觉客观评价指标进行分析。
由于单个指标与驾驶员整体转向感觉评价之间并没有直接的对应关系。
通过主成分分析的方法,获得互不相关的客观综合评价指标,将主观转向感觉量化为客观评价指标值,并且对客观评价指标与驾驶员主观评价进行相关性检验,检验EPS 转向感觉客观评价指标的合理性和可靠性。
转向感觉客观评价指标的确定便于对EPS 转向感觉进行系统全面的评定,提高设计的可预见性。
关键词:电动助力转向 转向感觉 客观评价 主成分分析 中图分类号:U463.3Objective Evaluation of Electric Power Steering Steering FeelZHANG Xin 1 SHI Guobiao 2 LIN Yi 2(1. School of Mechanical Electric and Control Engineering, Beijing Jiaotong University, Beijing 100044;2. School of Mechanical and Vehicular Engineering, Beijing Institute of Technology, Beijing 100081)Abstract :Based on the electric power steering (EPS) system ,subjective evaluation tests of complete vehicle steering feel are carried out. The steering feel objective evaluation indexes such as steering portability, returnability, middle position steering and lane change steering are analyzed respectively. As there is no direct corresponding relation between a single index and the driver’s whole steering feel, the principal component analysis (PCA) method is chosen to obtain uncorrelated objective comprehensive evaluation indices, the subjective steering feel is quantified to objective evaluation index value. The objective evaluation index is validated by drivers’ subjective evaluation. The objective indices make it possible to benchmark EPS steering feel characteristics entirely and improve the prediction in EPS design. Key words :Electric power steering Steering feel Objective evaluation Principal component analysis0 前言电动助力转向(Electric power steering, EPS)采用受电子控制单元控制的电机直接提供助力,适应以安全、舒适、节能、环保为标志的现代汽车发展方向,备受汽车业界的重视。
操稳客观数据处理技术规范
Lateral Acceleration [m/s2] Yaw Velocity [deg/s]
Steering Wheel Angle VS Lateral Acceleration 4.5
4
Steering Sensitivity: 1.0124 g/100deg
操稳客观数据处理
目录
一.蛇行试验 二.角阶跃试验 三.角脉冲试验 四.转向回正试验 五.原地转向试验 六.滚动转向试验 七.直线加速试验 八.直线制动试验 九.直线行驶稳定性试验 一○.正弦扫频输入试验 一一.中心区转向试验
2
一、蛇行试验
1)蛇行车速 第i次试验的蛇行车速按下式确定:
v1 3.6 L (N 1) / t1
Steering Wheel Torque [Nm]
2
0
-2
评价指标: 1)方向盘最大圈数:方向盘能转动的最大圈数;
-4
-6 -500 -400 -300 -200 -100 0 100 200 300 400 500
Steering Wheel Angle [deg]
Raw Data Max Torque point On Centre Area
t —采样时间间隔,不应大于 0.2s。
7)侧向加速度总方差
Eay
n i i0 0
a yi a yo
2
t
式中: Eay —侧向加速度总方差,s;
ayi —侧向加速度响应的瞬时值,m/s2;
ayo —侧向加速度响应的稳态值,m/s2。
6
三、角脉冲试验
数据处理方法:利用转向盘脉冲输入和横摆响应,辨识ARMAX模型参数,利用欧拉转换 ,
Phase [deg]
汽车操纵稳定性分析与评价指标

汽车的操纵稳定性分析和评价指标
1
➢汽车的操纵稳定性是指在驾驶者不感到过分紧张、疲劳 的情况下,汽车能遵循驾驶者通过转向系统及转向车轮给定 的方向行驶,且当遭遇外界干扰时,汽车能抵抗干扰而保持 稳定行驶的能力。
➢汽车的操纵稳定性是汽车主动安全性的重要评价指标。
汽车的操纵稳定性分析和评价指标
➢路面有薄 水层时,由于 滑水现象,会 出现完全丧失 侧偏力的情况。
汽车的操纵稳定性分析和评价指标
23
汽车的操纵稳定性分析和评价指标
24
二、汽车的转向特性
直角三角勾股定理: c2=a2+b2
因此:sin2A+cos2A=1 sinA/cosA=tanA tanA=1/cotA
汽车的操纵稳定性分析和评价指标
直线cc表示轮胎平面线
Fy
俯视图
直线aa表示轮胎与地 面接触印痕的中心线
FY
车轮静止
汽车的操纵稳定性分析和评价指标
10
2)在弹性轮上作用侧向力 F y
Fy
FY
车轮滚动
汽车的操纵稳定性分析和评价指标
11
侧偏角α
轮胎接地印 迹中心的位移 方向与X轴的 夹角。
2.侧偏现象
当车轮有侧向弹性时,即使FY没有 达到侧向附着极限,车轮行驶方向也 将偏离车轮平面的方向。
前205、后225的轮胎组合,使得前轮的侧偏刚度小于后轮,
有利于营造不足转向特性。
汽车的操纵稳定性分析和评价指标
31
3)过多转向 R<R0 u↑→ R↓→ 汽车具有过多转向特性。
这意味着很小的前轮转角将产生极大的横摆角速度, 汽车将发生激转而侧滑或侧翻。由于过多转向汽车有失 去稳定性的危险,汽车应具有适度的不足转向特性。
c-ncap评价标准

C-NCAP评价标准、C-NCAP评价标准主要包括以下三个方面:试验项目,性能指标与评分办法,得分与星级评价,下面一一介绍。
1.试验项目1.1正面100%重叠刚性壁障碰撞试验试验车辆100%重叠正面冲击固定刚性壁障,壁障上附以20mm厚胶合板。
碰撞速度为50-51km/h(试验速度不得低于50km/h)。
试验车辆到达壁障的路线在横向任一方向偏离理论轨迹均不得超过150mm。
在前排驾驶员和乘员位置分别放置一个Hybrid III型第50百分位男性假人,用以测量前排人员受伤害情况。
在第二排座椅最左侧座位上放置一个Hybrid III型第5百分位女性假人,最右侧座位上放置一个P系列3岁儿童假人,用以测量第二排人员受伤害情况。
若车辆第二排座椅ISOFIX固定点仅设置于左侧,可以将女性假人放置的位置与儿童约束系统及儿童假人调换。
对于两门单排座车型,仅在前排驾驶员和乘员位置分别放置一个Hybrid III型第50百分位男性假人,用以测量前排人员受伤害情况。
1.2正面40%重叠可变形壁障碰撞试验试验车辆40%重叠正面冲击固定可变形壁障。
碰撞速度为63-65km/h,偏置碰撞车辆与可变形壁障碰撞重叠宽度应在40%车宽±20mm的范围内。
在前排驾驶员和乘员位置分别放置一个Hybrid III型第50百分位男性假人,用以测量前排人员受伤害情况。
在第二排座椅最左侧座位上放置一个Hybrid III型第5百分位女性假人,用以测量第二排人员受伤害情况。
对于两门单排座车型,仅在前排驾驶员和乘员位置分别放置一个Hybrid III型第50百分位男性假人,用以测量前排人员受伤害情况。
在试验中需测量A柱、转向管柱和踏板变形量。
1.3可变形移动壁障侧面碰撞试验在移动台车前端加装可变形蜂窝铝,移动壁障行驶方向与试验车辆垂直,移动壁障中心线对准试验车辆R点,碰撞速度为50-51km/h(试验速度不得低于50km/h)。
移动壁障的纵向中垂面与试验车辆上通过碰撞侧前排座椅R点的横断垂面之间的距离应在±25mm内。
转向盘中间位置操纵稳定性试验评价指标分析

转向盘力矩为零处的横坐标迟滞区
该指标描述了转向盘作用力矩为零时,即回正力矩与转向系统摩擦力矩相等时,转向盘转角的大小,该指标类似于回正性能试验中的“残留转向盘转角”。反映了转向盘转角相对于转向盘力矩的滞后,属于“滞后”特性范畴。
转向盘中间位置操纵稳定性评价指标
迟滞回线
评价指标
指标描述
反应问题
转向盘力矩与转角关系曲线
平均转向刚度
转向盘转标描述了车辆系统在中心区范围内,转向盘力矩关于转向盘转角的平均增益,很大程度上反映了车辆在中心区范围内的转向盘作用力水平,受助力特性影响较大,对驾驶员高速行驶时操纵车辆的体力负担具有一定的影响,属力矩的“灵敏度”特性范畴。
转向盘中间位置转向刚度
转向盘转角为零处的斜率
该指标描述了车辆系统在直线行驶位置时,转向盘力矩关于转向盘转角的增益,反映了车辆驶离直线行驶状态初始时刻的转向盘力矩增益。将该指标与“平均转向刚度”相联系,对于描述车辆高速行驶时,在驶离中心区过程中转向力感觉具有较大意义。该指标属力矩的“灵敏度”特性范畴。
转向摩擦力矩
转向盘转角为零处的纵坐标迟滞区
该指标描述了由转向系统机械结构摩擦引起的转向盘力矩相对于转向盘转角的超前,很大程度上反映了高速行驶状态下转向系统及轮胎的摩擦力水平,由于中心区工况下轮胎受到的侧向力较小,因此“转向摩擦力矩”对转向盘力矩水平有较大的影响。该指标属于“滞后”特性范畴。转向系统的摩擦主要来自于车轮绕主销的摩擦、球头销处的摩擦、转向器机械结构中的摩擦和万向节的摩擦。
电动助力转向系统移线试验转向感觉评价与分析
K e r s El c rc p we t e n , n — h n e t s, t e n e l g Ev l a i n i d x y wo d : e t i o r se r g La e c a g e t e r g f ei , a u t n e i S i n o
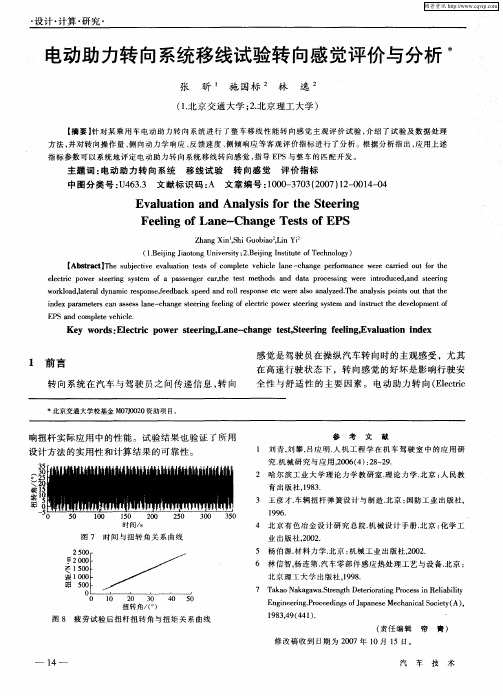
图 7 时间 与 扭 转 角关 系 曲线
25 o 0 2o o o 15 0 0 lo o o
6 林 信 智 , 连 第 . 车 零 部件 感 应 热处 理 工艺 与设 备 . 京 : 杨 汽 北
北 京 理 工 大学 出 版社 9 8 19 .
响扭 杆实 际应用 中的性能 。试 验结果也 验证 了所用
参
考
文
献
设计 方法 的实用性 和计算 结果 的可靠性 。
l 刘青, 攀, 刘 吕应 明. 机 工 程 学 在 机 车 驾 驶 室 中 的应 用 研 人
究 . 械 研究 与应 用 , 0 ( )2 — 9 机 2 6 4 :8 2 . 0 2 哈 尔 滨 工 业 大 学理 论 力 学 教 研 室 . 论 力 学 . 京 : 民教 理 北 人
维普资讯
・
设计 ・ 算・ 究・ 计 研
如
电动助力转 向系统移线试验转 向感觉评价与分析
张 昕 施 国 标 林 逸
( . 京交通 大学 ;. 1 北 2北京理 工大 学 )
【 要 】 对 某 乘 用 车 电 动 助力 转 向 系统 进 行 了整 车 移 线 性 能 转 向感 觉 主观 评 价 试 验 , 摘 针 介绍 了试 验 及 数 据 处 理
方法 , 对转 向操 作 量 、 向 动力 学 响 应 、 馈 速 度 、 倾 响应 等 客 观 评 价指 标 进 行 了分 析 。根 据 分 析指 出 , 用 上 述 并 侧 反 侧 应 指标 参 数 可 以 系统 地 评 定 电 动助 力 转 向 系统 移 线 转 向感 觉 , 导 E S与整 车 的匹 配开 发 。 指 P
《汽车概论》课程教学大纲
《汽车概论》课程教学大纲《汽车概论》课程教学大纲一、《汽车概论》课程说明(一)课程代码:0216038(二)课程英文名称:Introduction to Vehicle(三)开课对象:机械工程学院本科各专业(四)课程性质:本课程是汽车类专业的专业选修课及各专业的公共选修课。
通过本课程的学习,使学生掌握汽车性能的主要评价指标,汽车受力分析的基本方法,汽车传动系、汽车制动系统和汽车转向系设计的基础理论,为合理设计和正确使用汽车打下理论基础。
(五)教学目的:通过本课程的学习,使学生掌握汽车性能的主要评价指标,汽车受力分析的基本方法,汽车传动系、汽车制动系统和汽车转向系设计的基础理论,为合理设计和正确使用汽车打下理论基础。
(六)教学内容:本课程主要研究汽车的动力性、燃油经济性、汽车动力装置参数的选定、制动性、操纵稳定性、平顺性和通过性。
(七)学时数、学分数及学时数具体分配:学时数: 32学时分数: 2 学分(八)教学方式:以多媒体教学手段为主要形式的课堂教学。
(九)考核方式和成绩记载说明:考核方式为考试。
严格考核学生出勤情况,达到学籍管理规定的旷课量取消考试资格。
综合成绩根据平时成绩、实验成绩和期末成绩评定,平时成绩占30% ,期末成绩占70% 。
二、讲授大纲与各章的基本要求第一章汽车的动力性教学要点:掌握汽车的动力性及其指标,汽车的驱动力和行驶阻力的意义、算法、影响因素,汽车的行驶方程及转动质量换算系数,汽车的驱动力-行驶阻力和功率平衡图,汽车的驱动与附着条件。
了解液力变矩器汽车的动力性。
教学时数: 4学时教学内容:第一节汽车的动力性指标第二节汽车的驱动力与行驶阻力一、汽车的驱动力二、汽车的行驶阻力三、汽车行驶方程式第三节汽车的驱动力-行驶阻力平衡图与动力特性图一、汽车的驱动力-行驶阻力平衡图二、动力特性图第四节汽车行驶的附着条件与汽车的附着率一、汽车行驶的附着条件二、汽车的附着力与地面法向反作用力三、作用在驱动轮上的地面切向反作用力四、附着率第五节汽车的功率平衡第六节装有液力变矩器汽车的动力性考核要求:1、汽车的动力性指标(识记)2、汽车的驱动力与行驶阻力概念(识记)3、汽车行驶阻力包含的各阻力(领会)4、汽车的驱动力-行驶阻力平衡图与动力特性图(领会)5、汽车行驶的附着条件(识记)6、汽车的附着率(领会)7、汽车的功率平衡第二章汽车的燃油经济性教学要点:掌握汽车的燃油经济性及评价指标,汽车燃油经济性计算,提高汽车燃油经济性的途径。
《GB2020汽车操纵性转向中心区过渡特性试验方法》编制说明
汽车操纵性转向中心区过渡特性试验方法编制说明一、工作过程,任务来源、主要参加单位和工作组成员名单等;任务来源:依据2015年5月29日,全国汽车标准化技术委员会车辆动力学分技术委员会的会议决议,对ISO13674-2标准进行研究,并进行国标转换。
(计划书编号:20173651-T-339)编制本标准的重大意义:车辆中间位置性能是汽车性能的重要部分,它不仅仅是汽车品质问题,中间位置性能不好的车辆还会使人驾驶起来紧张,产生疲劳,影响安全。
在GB6323-2014中量化了中心转向的部分性能,但对转向初始状态的中心性能量化不足,ISO13674-2有效补充了该方面的不足,更接近于主观评价项目中的内容。
对ISO13674-2进行研究、验证,转化成国标后,会促进研发人员对车辆中心性能的认识,进一步改善汽车性能,提升汽车品质。
主要参加单位:国家汽车质量监督检验中心(襄阳)、中汽研汽车检验中心(天津)有限公司、泛亚汽车技术中心有限公司、吉林大学汽车仿真与控制国家重点实验室、南京汽车集团有限公司汽车工程研究院、东风汽车公司技术中心工作组成员名单:朝斌、吴旭、梁荣亮、杨万安、詹军、张丙军、杨建园沙雷二、标准编制原则和主要内容,修订标准时应列出与原标准的主要差异和理由;标准编制原则:对ISO13674-2消化吸收,尽可能遵循原标准内容;主要内容:中心转向试验有很多种,本标准量化了车辆高速直线行驶时,汽车缓慢转向过渡到较小侧向加速度过程中,车辆在中心位置的转向感觉。
标准中规定了试验条件、试验方法、数据处理的方法和量化中心位置感觉的相关指标。
三、采用国际标准和国外先进标准情况,及与国际、国外同类标准水平的对比情况;本标准参照最新版本的国际标准,ISO13674-2-2006《Road vehicles-Teset method for the quantification of on-centre handling-Part2:Trasition test》四、主要试验验证情况和预期达到的效果;至今为止,已对该标准的试验方法进行了验证,共进行了若干台车辆的试验,且对数据进行了处理,以下是其中一台车辆的试验图形及数据处理结果。
汽车转向系统性能检测与评价分析

• 机动车方向盘的最大自由转动量不允许 大于:
• (1)最高设计车速不小于100km/h的机 动车:20°;
• (2)三轮汽车:45°;
• (3)其他机动车:30°。
• 2)方向盘转向力
• 机动车在平坦、硬实、干燥和清洁的水 泥或沥青道路上行驶,以10km/h的速度在
• 5s之内沿螺旋线从直线行驶过渡到直径为 24m的圆周行驶,施加于方向盘外缘的最 大切向力不应大于245N。
ab之间距离称为主销后倾拖距 力矩YL称为稳定力矩
在YL力矩作用下,将使车轮 回复到原来中间的位置,从而 保证了汽车稳定的直线行驶。 此力矩称为稳定力矩。
但此力矩也不宜过大,否 则在转向时为了克服此力矩, 驾驶员必须在转向盘上施加较 大的力(即转向沉重)。
因稳定力矩的大小取决于 力臂L的数值,而力臂L又取决 于后倾角γ的大小。现在车辆一 般采用的γ角不超过2°~3°现 代高速汽车由于轮胎气压降低 弹性增加,而引起稳定力矩增 加,因此γ角可以减小到零甚至 为负。
第四章
汽车转向系统性能检测与评价
多媒体课件
4.1汽车转向系统性能评价指标
• 1操纵性与稳定性
•汽车操纵性----驾驶员以最少的修正而能维 持汽车按给定的路线行驶以及按驾驶员愿望 转动转向盘以改变汽车行驶方向的能力。
• 操纵性能的评价: • (1)在规定车速下,汽车质心曲线轨迹与
转向盘转角的关系;
②气候条件
③左右车轮运动状态
2.转向操纵轻便性
• 转向操纵轻便性——驾驶员操纵转向盘的 容易程度。
• 转向沉重容易使驾驶员产生驾驶疲劳或使 车辆操纵失控而导致交通事故。通常采用 转向助力装置。
• 转向助力装置:液压助力、气压助力、电 动机助力
中间位置转向试验和评价指标

中间位置转向试验和评价指标中间位置转向操纵稳定性的参数灵敏度分析和改进中间位置指的是车辆⾼速⾏驶时在直线⾏使位置附近,⽅向盘转动范围不太⼤,转动速度缓慢,侧向加速度较⼩时的⼀个区域,这个操纵区域称为中间位置(on-center)。
统计结果显⽰,车辆在⾼速⾏驶时,驾驶员绝⼤多数操纵⾏为发⽣在⽅向盘转动范围不太⼤,侧向加速度较⼩的⼀个区域内,需要急打⽅向的紧急情况相对较少,在⾼速公路上尤其如此。
在评估车辆⾼速⾏驶的操纵性能时,中间位置的路感是⼀个⾮常重要的问题,汽车的很多⾼速操纵稳定性能指标,例如经常评价的车辆是否发飘的问题就需要在这个区域内进⾏评估。
另外,转向系统的⾮线性特性在转向过程中起着⾮常重要的作⽤,尤其是在中间位置。
因此,在研究路感各影响因素的同时,重点需要研究⼲摩擦、液压助⼒等⾮线性特性的影响。
评价采⽤的客观评价指标,主要是那些与主观性评价相关性好的中间位置操纵稳定性客观评价指标。
1 中间位置操纵稳定性的客观评价⽅法可以通过侧向加速度、⽅向盘⼒矩和⽅向盘转⾓三者之间的相互关系对整车的操稳进⾏评价。
⽅向盘⼒矩VS侧向加速度从图中提取出五个评价指标:1)⽅向盘⼒矩为0时的车辆侧向加速度⽅向盘⼒矩为0时的汽车侧向加速度表征了汽车的回正性能。
为了理解这个指标的意义,可以设想汽车在移线运动中⽅向盘最后要回到直线⾏驶的位置之前,若松开⽅向盘,车辆并不会回到直线⾏驶的位置⽽会“卡住”在某处。
显然,此时⽅向盘⼒矩为0,但汽车仍在做⼤半径的曲线运动,仍有⼀定的侧向加速度,此加速度越⼩表明汽车的回正性能越好。
2)侧向加速度为0g时的⽅向盘⼒矩侧向加速度为0g时的⽅向盘⼒矩主要反映转向系统的⼲摩擦。
3)侧向加速度为0g时⽅向盘⼒矩梯度侧向加速度为0g时的⽅向盘⼒矩梯度就是⽅向盘⼒矩随侧向加速度的变化率,表征了车辆在直线⾏驶时的“路感”,它主要受到主销⼏何参数和总传动⽐的影响。
在装有动⼒转向的车辆上,转向机阀中扭⼒杆的刚度、转阀的设计及转向系统摩擦都会对其产⽣影响。
转向特性的几个等价评价指标及习题解答

ω r δ
s
ω δ
r
=
s
u / L 1 + k ⋅ u
2
∴
ωr δ
)
s
| u = u ch =
1 2
(
u ch L
)
而中性转向时, 而中性转向时,当 u = u ch 时,
∴
ωr δ s u =uch
)|
=( )
u ch L
所以, 所以,
∴
ωr k =0 δ s u =u ch
)|
转弯半径之比R/R0: 转弯半径之比
♦ 推导汽车的转弯半径之比
R/R0与稳定性因数 的关系: 与稳定性因数k的关系 的关系: R0为车速很低且方向盘转 角保持不变时汽车的转向半径, 角保持不变时汽车的转向半径, 此时, 因满足条件: 此时, 因满足条件: 车速很低; 车速很低; 侧向加速度a 较小; 侧向加速度 y较小; 轮胎侧偏角接近零; 轮胎侧偏角接近零;
∴ | α1 | − | α 2 |= | a y | ⋅L ⋅ k
工程上,常用前/ 工程上,常用前/后轮侧偏角之差表示汽车 稳态响应。 稳态响应。 可见,汽车的三种转向特性: 可见,汽车的三种转向特性:
– 当k>0时,| α 1|-| α 2 |>0, 汽车为不足转向; 汽车为不足转向; 时 – 当k=0时,| α 1|-| α 2 |=0, 汽车为中性转向; 汽车为中性转向; 时 – 当k<0时,| α 1|-| α 2 |<0, 汽车为过多转向; 时 汽车为过多转向;
=2
( )| )
ωr k >0 δ s u =uch
临界车速求解
解答: 解答: ω u r = L 2 可知, 可知, 由 δ s 1 + ku ωr 必须1+ku2 要使 → ∞ 必须 δ s
汽车操纵稳定性的客观定量评价指标
第 30 卷 第1期 2000 年 1 月
吉林工业大学自然科学学报
Natural Science Journal of Jilin University of Technology
Vol. 30 No . 1
Jan. 2000
文章编号 :1002 2378 X ( 2000) 01 20001 206
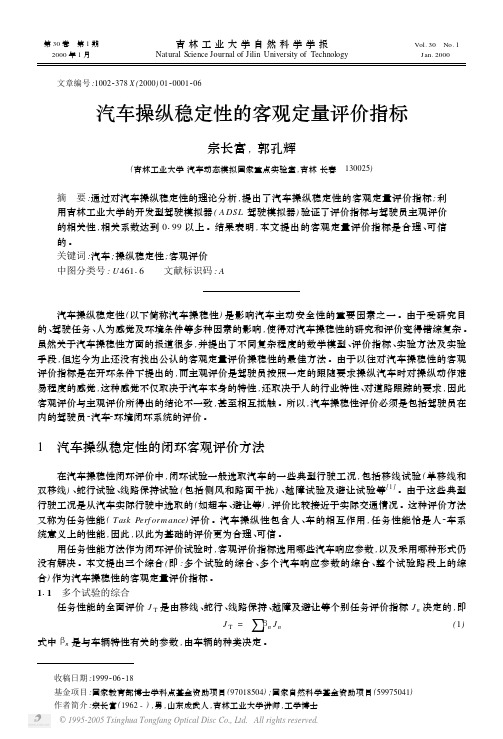
111 多个试验的综合
任务性能的全面评价 J T 是由移线 、 蛇行 、 线路保持 、 越障及避让等个别任务评价指标 J n 决定的 , 即
JT =
βJ ∑
n
n
( 1)
式中 βn 是与车辆特性有关的参数 , 由车辆的种类决定 。
收稿日期 :1999 206 218 基金项目 :国家教育部博士学科点基金资助项目 ( 97018504) ; 国家自然科学基金资助项目 ( 59975041) 作者简介 :宗长富 ( 1962 - ) , 男 , 山东成武人 , 吉林工业大学讲师 , 工学博士 © 1995-2005 Tsinghua Tongfang Optical Disc Co., Ltd. All rights reserved.
载货汽车基本性能关键指标及评分体系研究
载货汽车基本性能关键指标及评分体系研究摘要:对N2和N3类载货汽车基本性能关键指标进行分类设定,通过对大量实车测试结果统计分析,结合主观感受,建立了一套载货汽车基本性能关键指标体系与评分规则。
基于对评价体系的研究,能够对整车性能高低统一标尺,直观展现整车关键性能的优劣。
通过实车验证,载货车基本性能关键指标评分规则具备广泛适用性。
关键词:基本性能;整车试验;评价指标中图分类号:TH122 文献标识码:A据中汽协统计数据显示,2021年国内载货车总销量达到428.8万辆,其中轻型和中型载货车销量合计达到228.9万辆,占比高达53.4%[1]。
而且在受疫情影响整个汽车行业出现较大下滑的背景下,轻中型载货车销量较前一年仅下降3%显得更难能可贵。
随着近年来国内载货汽车市场的蓬勃发展,各大车企纷纷加快新车开发进度,加大研发投入,打造适应国内市场需求具备市场竞争力的卡车产品。
整车结构与功能就像是有机体的皮与骨,而性能则是灵与肉,只有将二者完美的结合在一起才能打造出一款品质优良的整车。
随着国家法规与客户要求的持续提升,各大卡车生产企业也纷纷加大开发力度,整体提升了国内载货汽车的性能品质。
[2]本文对近年来国内多款载货汽车从动力经济性、制动和操稳性能三方面,进行了大量的整车测试与主观评价[3],总结归纳当前载货汽车在几大基本性能关键指标上的技术水平,建立评价体系,为评价新产品关键性能水平提供了依据。
1基本性能关键指标设定1.1 动力经济性关键指标设定收稿日期:2022-07-07作者简介:黎程(1985-),男,硕士,中级机械工程师;宋军(1986-),男,本科,中级机械工程师。
动力经济性关键指标由2大类14项组成,动力性大类由最高档最高车速、次高档最高车速、最高档最低稳定车速、次高档最低稳定车速、最大爬坡度、全油门起步加速至50km/h 时间、全油门起步加速至80km/h时间、次高档全油门加速40km/h至80km/h时间、最高档全油门加速50km/h至80km/h时间、初速50km/h滑行距离、初速90km/h滑行距离共11项组成。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
中间位置转向操纵稳定性的参数灵敏度分析和改进中间位置指的是车辆高速行驶时在直线行使位置附近,方向盘转动范围不太大,转动速度缓慢,侧向加速度较小时的一个区域,这个操纵区域称为中间位置(on-center)。
统计结果显示,车辆在高速行驶时,驾驶员绝大多数操纵行为发生在方向盘转动范围不太大,侧向加速度较小的一个区域内,需要急打方向的紧急情况相对较少,在高速公路上尤其如此。
在评估车辆高速行驶的操纵性能时,中间位置的路感是一个非常重要的问题,汽车的很多高速操纵稳定性能指标,例如经常评价的车辆是否发飘的问题就需要在这个区域内进行评估。
另外,转向系统的非线性特性在转向过程中起着非常重要的作用,尤其是在中间位置。
因此,在研究路感各影响因素的同时,重点需要研究干摩擦、液压助力等非线性特性的影响。
评价采用的客观评价指标,主要是那些与主观性评价相关性好的中间位置操纵稳定性客观评价指标。
1 中间位置操纵稳定性的客观评价方法可以通过侧向加速度、方向盘力矩和方向盘转角三者之间的相互关系对整车的操稳进行评价。
方向盘力矩VS侧向加速度从图中提取出五个评价指标:1)方向盘力矩为0时的车辆侧向加速度方向盘力矩为0时的汽车侧向加速度表征了汽车的回正性能。
为了理解这个指标的意义,可以设想汽车在移线运动中方向盘最后要回到直线行驶的位置之前,若松开方向盘,车辆并不会回到直线行驶的位置而会“卡住”在某处。
显然,此时方向盘力矩为0,但汽车仍在做大半径的曲线运动,仍有一定的侧向加速度,此加速度越小表明汽车的回正性能越好。
2)侧向加速度为0g时的方向盘力矩侧向加速度为0g时的方向盘力矩主要反映转向系统的干摩擦。
3)侧向加速度为0g时方向盘力矩梯度侧向加速度为0g时的方向盘力矩梯度就是方向盘力矩随侧向加速度的变化率,表征了车辆在直线行驶时的“路感”,它主要受到主销几何参数和总传动比的影响。
在装有动力转向的车辆上,转向机阀中扭力杆的刚度、转阀的设计及转向系统摩擦都会对其产生影响。
4)侧向加速度为0.1g处的方向盘力矩侧向加速度为0.1g的方向盘力矩值代表了方向盘非线性力的大小。
5)侧向加速度为0.1g处方向盘力矩梯度0.1g处方向盘力矩梯度代表车辆的非线性路感,反映的是车辆驶离直线行驶位置时的“路感”。
动力转向的车辆在0.1g时的力矩和力矩梯度比机械转向器要小很多,因此路感比机械转向差。
一些车辆中间位置转向试验客观指标的评价值方向盘转角VS侧向加速度方向盘转角()()侧向加速度 g从图中提取的评价指标:转向灵敏度、最小转向灵敏度和转向迟滞。
1)转向灵敏度侧向加速度为0.1g时曲线斜率的倒数反映的是转向灵敏度。
单位g/°。
2)最小转向灵敏度图上侧向加速度0g-0.1g之间的曲线上最大斜率处,其值的倒数为最小转向灵敏度,这个灵敏度通常比0.1g的转向灵敏度低很多,主要原因在于非线性的转向柔性,在中间位置转向系比较高的转向柔性和横摆冲击会减小最小转向灵敏度。
3)转向灵敏度比转向灵敏度与最小转向灵敏度的比值。
因为在某种程度上最小转向灵敏度也与0.1g处的转向灵敏度成比例的变化,因此可以将二转向灵敏度进行比较,可以排除由转向柔性对系统分析的干扰,通用公司后来定义此比值为“线性度”。
此项指标也可作为车辆易于驾驶程度的评价指标,线性度越高,说明车辆响应变化率与输入变化率的比例化程度越高,车辆也就越容易驾驶,这一点对新司机而言尤显重要。
4)转向迟滞转向迟滞等于侧向加速度在正负0.1g之间的曲线所包围的面积再除以0.2g。
其他评价指标郭孔辉在此基础上提出的三个新评价指标:平均转向灵敏度将整个中心区操纵性实验数据进行线性回归,其直线斜率的倒数除以100定义为平均转向灵敏度。
他的大小介于0.1g转向灵敏度与最小灵敏度之间,因为驾驶员对车辆感觉有滞后,特别对新手来说对细微处不能很好的感觉,更多感觉到的是中心区平均灵敏度,因此,用此指标能反映大多数司机的情况。
平均灵敏度方差定义实验数据与回归后支线的方差为平均灵敏度方差,由于静摩擦、转向系统柔性等原因造成了非线性,因此,此项指标也是对总体非线性程度的评价。
方差越小,说明这些影响非线性的因素越小,反之越大。
如果说0.1g是灵敏度及最小灵敏度是对代表性点处细节的评价,则郭孔辉的这两个指标是对整个中心转向区的综合评价。
线性回归的相关系数定义为灵敏度线性化系数评价指标,越接近1越好,这与线性度指标类似。
2.3方向盘力矩对方向盘转角有两个评价参数由方向盘力矩对转角特性关系图中导出,它们是0度转角时方向盘力矩及0度转角时方向盘力矩梯度,即常提到的转向的“刚度”,这个术语可能来自于此参数的单位(如:每单位角位移变化引起的力矩变化)。
然而,这个参数并不是通常意义上的转向系统刚度。
这些特性更接近需要精确控制操作(如闭环控制)的“感觉”,而在正常公路行驶时的转向开环控制意义不大。
2.3.1.平均方向盘力矩梯度将数据进行线性回归,其直线斜率定义为平均方向盘力矩梯度。
因为驾驶员对车辆感觉有滞后,特别对新手来说对细微处不能很好感觉,更多感觉到的是一种平均程度,它是中心区转向时“路感”的平均度量。
用此指标能反映大多数司机的情况。
2.3.2.平均方向盘力矩梯度方差实验数据与回归后直线的方差为平均方向盘力矩梯度方差。
由于静摩擦、转向系统柔性特别是动力转向助力等原因造成了系统非线性,因此,此项指标也是对总体非线性程度的评价。
方差越小,说明这些影响非线性的因素较小,反之就越大。
2.3.3.线性回归的相关系数线性回归的相关系数定义为“方向盘力矩梯度线性化系数”评价指标,越接近1越好,这与线性度指标类似。
另外,日本丰田公司的Akira Higuchi 和Hideki Sakai经过多次试验,采用多个驾驶员,研究中心区操纵稳定性的评价方法。
根据中心区操纵稳定性的主观评价与客观评价指标的相关性,分别从三个方面得出了以下结论[14]:2.4方向盘力矩特性方向盘力矩特性即方向盘力矩对侧向加速度特性。
力矩梯度以及力矩梯度的线性度是表示了方向盘的力矩特性的两个稳态评价指标。
力矩梯度是指中心区侧向加速度对方向盘力矩的变化率dy/dT,因此,力矩梯度越小,侧向加速度引起的力矩越大。
力矩梯度的线性度,是指中心区力矩梯度与非中心区力矩梯度之比。
实验表明,力矩梯度的线性度越小,驾驶员的主观评价越高。
2.5平面运动特性平面运动特性即侧向加速度对方向盘转角特性,侧向加速度增益即为汽车在非中心区侧向加速度对方向盘转角之比,侧向加速度增益的线性度是指中心区侧向加速度增益与非中心区侧向加速度增益之比。
此值越大,表明线性度越好,主观感觉就越好。
2.6侧倾运动特性侧倾运动特性即侧倾角对侧向加速度特性,侧倾率表示侧向加速度值较小时的范围内的侧倾角对侧向加速度的变化率,试验表明,此值越小,主观评价越高。
侧倾角延迟时间与主观评价的相关性不大。
综合以上两种评价方法,本文拟采用其中与主观评价相关性较好的参数作为本章的客观评价指标,具体指标是方向盘力矩对侧向加速度特性下的方向盘力矩为0时的汽车侧向加速度,0g时的方向盘力矩,0.1g时的方向盘力矩,0g时的方向盘力矩梯度,0.1g时的方向盘力矩梯度五个评价指标和方向盘转角对侧向加速度特性下转向灵敏度,最小转向灵敏度,0.1g下的转向灵敏度三个客观评价指标来对中心区操纵稳定性的参数灵敏度进行分析[14]。
3 中心区操纵稳定性的参数灵敏度分析3.1仿真工况及参数运用第二章所建立的动力转向系统的汽车操纵稳定性仿真模型,进行动力转向系统不同参数特性的计算机仿真,分别从转向系统的角传动比、阻尼、干摩擦、车轮定位参数以及液压助力几个方面进行。
采用中心区操纵稳定性仿真实验,过程如下:在车辆加速到100km/h后,驾驶员随后输入一个连续正弦转向。
转向频率为0.2Hz,转向输入要足够大,使侧向加速度峰值大约为0.25g。
仿真实验车的原车参数如下表所示。
表3-2 仿真实验轿车的整车以及转向系参数如图3—6所示为本程序的仿真结果的实验参数的时间历程图,本章将取其中的一个正弦作为我们分析的数据,详细介绍各个转向系统各参数对中心区操纵稳定性的影响。
246810-5-4-3-2-1012345时间方向盘转矩()s ()m n ⋅24681012-20-15-10-505101520时间()s 方向盘转角()图3-3方向盘力矩随时间变化历程图 图3-4方向盘转角随时间变化历程图246810-0.15-0.10-0.050.000.050.100.15时间()s 横摆角速度()s r a d /246810-3-2-10123时间()s 侧向加速度2/s m图3-5横摆角速度随时间历程图 图3-6侧向加速度随时间历程图3.2 参数灵敏度分析1.转向系统转向传动比对中心区操纵稳定性的影响1)转向器齿轮半径在车辆工业中,通常将齿轮比定义为方向盘转角与前轮转角之比值;观察低速下之转向行为可以发现,齿轮比的降低可以减少方向盘转至左、右死点之圈数,对于驾驶员在停车或大角度回转时,可以提高其操控上的便利性,然而相对于高速下之转向特性,车辆转向反映过于灵敏(即齿轮比太小)反而容易造成危险,因此车辆转向系之齿轮比的变化为影响驾驶员行为的关键因素[16]。
侧向加速度()2/s m 方向盘转矩(m n ⋅()方向盘转角侧向加速度()2/s m图3-7方向盘力矩对侧向加速度特性图3-8方向盘转角对侧向加速度特性由图3-7和3-8可以看出,当齿条半径由STEER_GR = 0.00877减小到STEER_GR = 0.0066时,齿条半径减少24.7%,方向盘力矩减少41.8%,侧向加速度减少29.4%,由方向盘力矩对侧向加速度特性图看出,力矩为0时的侧向加速度由-0.078g 变为-0.068g ,此值越小表示汽车的回正性越好。
0g 时的方向盘力矩由0.97m N ⋅减小到0.87m N ⋅;0.1g 时的力矩2.201m N ⋅减小到1.71m N ⋅, 0g 时的力矩梯度为减小,0.1g 时的力矩梯度减小。
由方向盘转角对侧向加速度特性图看出,0.1g 处的转向灵敏由0.0189deg 100/⋅g 减小为 0.0127deg 100/⋅g 。
2)齿条位移到右前轮转角传动比由图3-9和3-10中曲线表明:当齿条位移到右前轮转角传动比IL1, IL2由 IL1 = 0.1454867rad m / ,IL2 = 0.1454867rad m / 分别减小为 IL1 = 0.1054867rad m /, IL2 = 0.1054867rad m /时,角传动比减小40%,方向盘力矩增大了27%,侧向加速度增大了38%。
从方向盘力矩对侧向加速度特性图中可以看出:力矩为0时的侧向加速度由-0.078g 变为-0.071g ,此值越小表示汽车的回正性越好。