电梯运行速度曲线的分析及其应用
电梯门机速度曲线的自动比较
电梯门机速度曲线的自动比较作者:姚效来源:《硅谷》2009年第09期中图分类号:TP2文献标识码:A文章编号:1671-7597(2009)0510016-02一、背景介绍1854年,在纽约水晶宫举行的世界博览会上,美国人伊莱沙·格雷夫斯·奥的斯第一次向世人展示了他的发明-历史上第一部安全升降梯。
从那以后,升降梯在世界范围内得到了广泛应用。
电梯在操纵控制方面更是步步出新手柄开关操纵,按钮控制,信号控制,集选控制、人机对话等,多台电梯还出现了并联控制,智能群控。
现在的电梯大都采用分布式控制系统,由主控制柜、轿顶站、轿内操纵箱、层站召唤等控制部件组成。
轿顶站是电梯的重要控制部件,主要通过接收控制柜和轿内操纵箱的信号,驱动门电动机,实现电梯门的开关动作。
因为轿顶站是电梯中的关键部件之一,必须在出厂前对其进行模拟调试,以保证其工作性能达到设计要求。
由于电梯轿门形式多样,其开门的力矩和速度特性都不尽相同,轿顶站需要能够对应不同的开门特性需求。
本文将介绍一种调试装置的设计,以达到检验电梯轿顶站能否按照设计要求满足对应不同的开门特性的目的。
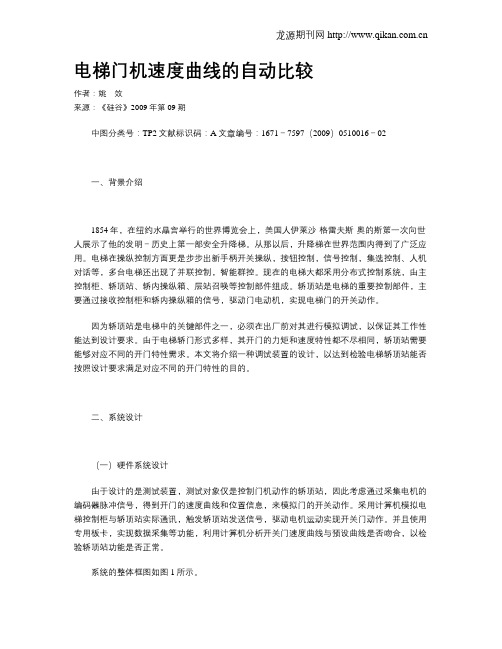
二、系统设计(一)硬件系统设计由于设计的是测试装置,测试对象仅是控制门机动作的轿顶站,因此考虑通过采集电机的编码器脉冲信号,得到开门的速度曲线和位置信息,来模拟门的开关动作。
采用计算机模拟电梯控制柜与轿顶站实际通讯,触发轿顶站发送信号,驱动电机运动实现开关门动作。
并且使用专用板卡,实现数据采集等功能,利用计算机分析开关门速度曲线与预设曲线是否吻合,以检验轿顶站功能是否正常。
系统的整体框图如图1所示。
(二)系统的软件设计系统要解决的关键问题是速度曲线的采集和与预设曲线的比较。
本文接下来将就这两个方面进行详细介绍。
1.速度曲线的采集。
本系统采用一个与电动机同轴的编码器,利用电动机每转过一圈编码器都会发出一个脉冲信号的特性,来表示电动机转过的圈数。
同时,在工控计算机中,插入一块专用的数据采集板卡,以记录编码器发出的脉冲数。
电梯运行速度优化控制策略探讨
电梯运行速度优化控制策略探讨xx年xx月xx日CATALOGUE目录•引言•电梯运行速度优化控制理论基础•电梯运行速度优化控制策略的方案设计•电梯运行速度优化控制策略的仿真分析•电梯运行速度优化控制策略的实验验证•基于深度学习的电梯运行速度优化控制策略研究•结论与展望01引言电梯作为现代高层建筑中重要的交通工具,其运行效率与乘坐舒适度对于人们的生活和工作具有重要影响。
随着城市化进程的加速和建筑高度的增加,电梯的运行效率问题逐渐凸显,因此对电梯运行速度优化控制策略的研究具有重要意义。
研究背景与意义VS国内外研究现状及发展趋势国内对于电梯速度优化控制的研究起步较晚,但随着技术水平的提高和研究的深入,也取得了一定的进展。
国外对于电梯速度优化控制的研究起步较早,且取得了一定的成果。
目前,电梯速度优化控制策略主要集中在以下几个方面:基于模糊控制的优化策略、基于神经网络的优化策略、基于遗传算法的优化策略等。
研究内容本研究旨在通过对电梯运行速度优化控制策略的研究,提出一种基于自适应模糊控制的电梯速度优化控制方法,并通过实验验证其可行性和有效性。
研究方法本研究采用理论分析和实验验证相结合的方法,首先对电梯的运行特性和速度控制系统的基本原理进行分析和研究,然后提出基于自适应模糊控制的电梯速度优化控制方法,并利用MATLAB进行仿真实验验证。
研究内容与方法02电梯运行速度优化控制理论基础电梯运行速度优化控制以运动学和控制理论为基础,通过调节电梯的运行速度,以达到节能、提高效率的目的。
电梯运行速度优化控制同时考虑了电梯的运行状态和外部环境条件,通过采集相关数据并进行分析,实现速度的优化调整。
电梯运行速度优化控制的原理1电梯运行速度优化控制的主要影响因素23包括空气阻力和机械阻力等,这些阻力会影响到电梯的运行速度。
电梯的运行阻力包括电动机、减速器和滑轮等部件,这些部件的性能会影响到电梯的运行速度。
电梯的拖动系统包括控制器、传感器和调速器等部件,这些部件的性能会影响到电梯的运行速度。
采用PLC对电梯速度曲线产生方法的技术改造.

采用PLC对电梯速度曲线产生方法的技术改造电梯运行的舒适性取决于其运行过程中加速度a和加速度变化率p的大小,过大的加速度或加速度变化率会造成乘客的不适感。
同时,为保证电梯的运行效率,a、p的值不宜过小。
能保证a、p最佳取值的电梯运行曲线称为电梯的理想运行曲线。
电梯运行的理想曲线(图1)应是抛物线-直线综合速度曲线,即电梯的加、减过程由抛物线和直线构成。
电梯给定曲线是否理想,直接影响实际的运行曲线。
一、东洋电梯速度曲线的产生方法东洋电梯采用的方法是电梯运行的舒适性取决于其运行过程中加速度a和加速度变化率p的大小,过大的加速度或加速度变化率会造成乘客的不适感。
同时,为保证电梯的运行效率,a、p的值不宜过小。
能保证a、p最佳取值的电梯运行曲线称为电梯的理想运行曲线。
电梯运行的理想曲线(图1)应是抛物线-直线综合速度曲线,即电梯的加、减过程由抛物线和直线构成。
电梯给定曲线是否理想,直接影响实际的运行曲线。
一、东洋电梯速度曲线的产生方法东洋电梯采用的方法是阶梯-滤波方式,和一般电梯的起、制动方式一样,起动受时间控制(称为时间原则),制动受距离控制(称为距离原则)。
先通过电阻分压产生阶梯给定电压U,阶梯电压的顺序由继电器的触点控制。
每一阶梯的保持时间,就是对应继电器常开触点吸合的时间,这一时间由延时电路实现。
制动过程由对应减速距离的选层器凸轮触点和门区内的磁感应开关控制。
起动过程分12级,制动过程为13级。
这是为了在起动时有足够的起动转矩,而将第一级给定电压设置得较高。
制动时,为保证平层精度,最后一级要小一些。
阶梯电压产生后,送到滤波电路,经滤波输出后,产生平滑的速度给定曲线。
采用硬件电路实现的速度曲线产生方法,由于采用继电器逻辑控制,不仅可靠性不理想,而且存在下述问题:(1)受分级电压级数的限制,不易使曲线达到理想;(2)调试困难;(3)加速过程采用由小到大的阶梯给定顺序,引起电梯起动时的冲击。
这一问题是由于在电梯起动瞬间克服了机械静磨擦力后,给定电压没能随磨擦力的减小而及时降低造成。
毕业设计—对在用电梯控制系统方面的改造
毕业设计—对在用电梯控制系统方面的改造对在用电梯控制系统方面的改造摘要用可编程控制器(PC)实现对电梯的逻辑控制,实质上是使控制算法不再由硬件逻辑所固定,而是通过程序储存器中的程序(软件)进行控制。
因此,对于有不同功能要求的电梯控制系统,只要改变程序储存器中的程序指令——软件即可,而无需变更或减少硬件系统的布线。
因而十分便于使用、管理和改变功能要求。
另一方面也减少了控制系统体积,减低能耗和减低维修保养费用。
本文使用三菱可编程逻辑控制器代替传统的继电器-接触器控制系统,编制在用电梯控制所需要的全部程序,确定了PC的输入输出信号。
关键词:电梯控制,可编程控制器,软件逻辑Reconstruction of On-Service Elevator Controlling SystemABSTRACTUsing Programmable Controller to realize the logical controlling of elevators is virtually making the controlling arithmetic not to be decided by hardware logic, instead, by programs stored in program memory (software). Therefore, as for different functional requirement of elevator controlling system, we just need to change the instructions storedin memory, needless to change or diminish the installation of hardware system. So it’s very convenient to use, manage and change the instructions. To another hand, it has diminished the volume of the controlling system, reduced energy consumption and expense to maintenance. In this article, we use Mitsubishi Programmable Logic Controller to replace traditional relay –contactor controlling system, compile all the programs needed for elevator controlling, and set up the input/output ports of PC.Key Words: elevator controlling, PC, software logic目录中文摘要ABSTRACT第一章绪论 (1)1.1 电梯的电气控制系统 (1)1.2 电梯电气系统的分类 (1)第二章电梯电气控制的基本原理 (3)2.1 电梯运行的条件 (3)2.2 电梯的工作状态 (3)2.3 电梯控制线路的主要组成 (3)2.4 电梯运行的速度曲线 (5)第三章可编程控制器(PC)控制系统 (6)3.1 PC的定义和特点 (6)3.2 PC的基本工作原理 (7)3.3 PC的基本结构 (8)3.4 三菱FX2系列PC中使用的各种元件 (9)第四章可编程控制器在电梯控制系统上的应用 (16)4.1开关门控制电路 (18)4.2层楼控制和显示电路 (21)4.3自动和检修定向电路 (23)4.4启动、加速控制电路 (27)4.5减速停车和自动平层控制电路 (29)4.6指令和召唤信号的的登记和消除电路 (33)4.7检修运行控制电路 (36)4.8指令专用和超载控制 (37)第一章绪论1.1 电梯的电气自动控制系统根据不同的用途,电梯可以有不同的载荷,不同的速度及不同的驱动和控制方式。
电梯工作原理与运动分析

电梯工作原理与运动分析电梯是现代城市中不可或缺的交通工具之一,它的工作原理是通过电动机驱动缆绳系统的运动,从而实现上下楼的功能。
接下来,我将详细介绍电梯的工作原理和运动分析。
首先,电梯的工作原理可以简单描述为:电动机带动一根或多根钢丝绳通过滑轮系统与电梯厢体相连,当电动机启动时,钢丝绳便会收缩或拉伸,从而使电梯上升或下降。
电梯在运行时,通过对控制系统的操作控制电梯的开关、运行速度和停靠楼层等。
电梯的运动分析可以从多个方面进行考虑。
首先,电梯的速度是一个重要的指标。
电梯的运行速度由电动机的转速和钢丝绳直径等因素决定。
当电动机转速较大,钢丝绳直径较小时,电梯的速度会较快。
然而,速度过快也会引起安全隐患,所以电梯的速度通常需要在一定范围内控制。
其次,电梯的运行距离也是需要考虑的因素。
电梯的运行距离由电梯所处楼层的高度差决定。
当两个楼层的高度差越大时,电梯的运行距离也会相应增加。
电梯的运行距离较长时,所需的时间也会相应增加。
另外,电梯在运行过程中需要考虑的问题还有电梯的载重能力和安全性。
电梯的载重能力由电动机的功率和钢丝绳的直径等因素决定。
当电梯的载重能力达到一定标准后,才能够确保乘客的安全。
此外,电梯在运行过程中需要通过控制系统对电梯进行安全监测,以确保电梯在运行过程中的稳定性和安全性。
最后,电梯的运动还需要考虑电梯的制动和停靠。
当电梯需要停靠在其中一楼层时,电梯的制动系统会发挥作用,通过锁紧钢丝绳,使得电梯能够平稳停靠。
制动系统的设计需要确保制动效果良好,以保证乘客的安全。
同时,电梯在停靠后还需要进行开门和关门的操作,确保乘客能够进出电梯。
总结起来,电梯的工作原理是通过电动机驱动钢丝绳系统的运动,从而实现电梯的升降。
电梯的运动分析需要考虑多个因素,包括电梯的速度、运行距离、载重能力、安全性以及制动和停靠等。
电梯的设计需要综合考虑这些因素,以确保电梯的安全和舒适性。
8-----第7章 电梯运行状态分析
第7章电梯运行状态分析7.1 检修运行状态电梯处于检修运行工况,轿厢、外呼显示“保养中”。
检修优先级顺序为轿顶、轿厢、机房。
当前级(如轿顶)处于检修工况,则后一级(如轿厢)检修上下行键不起作用,以此类推。
电梯门未关好,且电梯处于非平层区,主控柜中显示“E7”故障,如果电梯处于平层区,则不显示“E7“故障。
如果希望电梯关门,可以按轿厢内的关门键,令电梯门关好,也可以直接按检修上行或下行键,电梯门会自动关好。
如果希望电梯开门,只有当电梯处于平层区,按轿厢内开门键,电梯门才会打开。
在电梯门关好的状态下(主控柜中的接触器K7已吸合),按检修上行键和下行键,电梯以检修速度(慢车)上行或下行,一旦松开检修上行或下行键,电梯立即停止运行。
电梯慢车上、下行时,轿厢和外呼盒显示的上、下箭头会滚动,电梯停止运行时,显示的上下箭头消失。
检修运行状态不检测“E3”、“E9”、“EB”、“EC”故障,所以当载客运行中出现这四种故障时,可以在检修状态下去清除故障显示,由于这四种故障不会影响检修运行,可以在检修状态下去排除这四种故障。
检修上、下行碰到上限位或下限位开关时会自动停止运行,其中检修下行并碰到下限位开关是进行电梯楼层自学习的条件之一。
在无司机工况,电梯自动关门后,如果门锁回路接触不好造成主控柜中的接触器K7不能吸合,则延时8秒钟后门会自动打开,再重新关门,关门后如果门锁回路接触好了,则门不再重新打开,如果门锁回路仍接触不好,则如此反复动作5次,最后门处于开门状态。
集选控制器显示“EC”故障。
7.2 电梯载客运行状态电梯主控柜上电或重新复位时,如果电梯处于平层区,则电梯自动开门。
如果电梯处于非平层区,则电梯自动关好门并以爬行速度下行至下一层的平层区,再自动开门。
轿厢和外呼板显示电梯所在楼层号。
电梯由检修工况切换到载客工况,电梯运行状态过程与上一条相同。
当电梯在非平层区出现故障并停梯后,如果故障消失(如门锁瞬间断开又闭合,“E7”故障出现又消失等),电梯会自动以爬行速度下行至下一层平层区后自动开门。
电梯运行速度曲线的控制

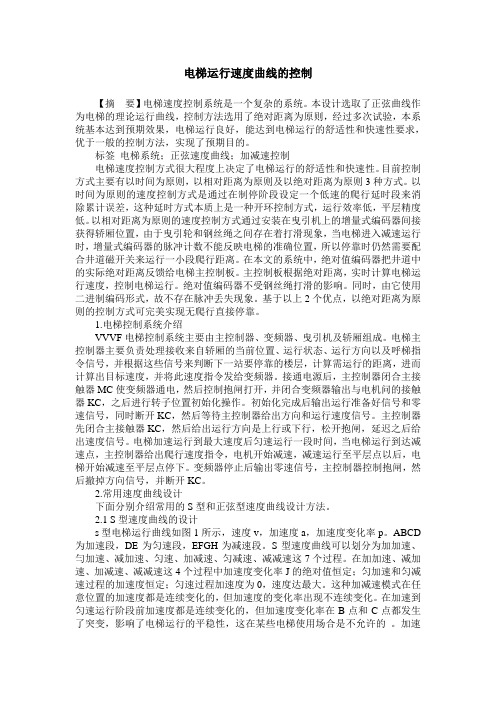
电梯运行速度曲线的控制【摘要】电梯速度控制系统是一个复杂的系统。
本设计选取了正弦曲线作为电梯的理论运行曲线,控制方法选用了绝对距离为原则,经过多次试验,本系统基本达到预期效果,电梯运行良好,能达到电梯运行的舒适性和快速性要求,优于一般的控制方法,实现了预期目的。
【关键词】电梯系统;正弦速度曲线;加减速控制电梯速度控制方式很大程度上决定了电梯运行的舒适性和快速性。
目前控制方式主要有以时间为原则,以相对距离为原则及以绝对距离为原则3种方式。
以时间为原则的速度控制方式是通过在制停阶段设定一个低速的爬行延时段来消除累计误差,这种延时方式本质上是一种开环控制方式,运行效率低,平层精度低。
以相对距离为原则的速度控制方式通过安装在曳引机上的增量式编码器间接获得轿厢位置,由于曳引轮和钢丝绳之间存在着打滑现象,当电梯进入减速运行时,增量式编码器的脉冲计数不能反映电梯的准确位置,所以停靠时仍然需要配合井道磁开关来运行一小段爬行距离。
在本文的系统中,绝对值编码器把井道中的实际绝对距离反馈给电梯主控制板。
主控制板根据绝对距离,实时计算电梯运行速度,控制电梯运行。
绝对值编码器不受钢丝绳打滑的影响。
同时,由它使用二进制编码形式,故不存在脉冲丢失现象。
基于以上2个优点,以绝对距离为原则的控制方式可完美实现无爬行直接停靠。
1.电梯控制系统介绍vvvf电梯控制系统主要由主控制器、变频器、曳引机及轿厢组成。
电梯主控制器主要负责处理接收来自轿厢的当前位置、运行状态、运行方向以及呼梯指令信号,并根据这些信号来判断下一站要停靠的楼层,计算需运行的距离,进而计算出目标速度,并将此速度指令发给变频器。
接通电源后,主控制器闭合主接触器mc使变频器通电,然后控制抱闸打开,并闭合变频器输出与电机问的接触器kc,之后进行转子位置初始化操作。
初始化完成后输出运行准备好信号和零速信号,同时断开kc,然后等待主控制器给出方向和运行速度信号。
主控制器先闭合主接触器kc,然后给出运行方向是上行或下行,松开抱闸,延迟之后给出速度信号。
电梯速度曲线生成技术分析
电梯速度曲线生成技术分析杨亚军【摘要】对电梯运行的速度速度曲线的生成技术进行分析,并提出可行的距离闭环的实现方案。
首先对实现的过程进行说明,按照此方案实现了运行效率的最大化。
其次对平层位置校正后的速度补正作了详细的分析,提出的运用三角函数生成补正曲线与理想曲线叠加的方法 ,解决了相对位置编码器用于距离闭环速度生成的突跳问题。
最后对该方案进行了实机测试,达到了很好的运行效果。
【期刊名称】《科学家》【年(卷),期】2016(004)007【总页数】3页(P135-137)【关键词】电梯;速度曲线;距离闭环【作者】杨亚军【作者单位】永大电梯设备中国有限公司研发中心,上海201615【正文语种】中文【中图分类】TU8随着生活水平的提高,人们对应电梯的数量、品质、舒适度的要求越来越高。
如何平稳的将乘客送到指定的楼层,如何最大限度的及时响应乘客呼梯,如何在多叫车的情况下优化分派,这些都对电梯提出较高的要求。
很好的解决这些问题就需要对电梯速度进行专门的研究。
GB/T10058《电梯技术条件》、GB7588《电梯制造与安装安全规范》规定了电梯运行的速度、加速度的要求,GB/T24474《电梯乘运质量测量》规定了电梯乘运质量的测试标准。
法规兼顾了电梯的舒适度及运行效率,对电梯运行的品质做了定义,其中很大一部分跟电梯的速度曲线有关,如A95加速度、轿厢运行振动等。
要达到国标的要求,需要对速度曲线的参数加以限制,通常设定运行的最大加速度、加速时间,最大速度,只要设定的参数合适,就能得到符合标准的曲线。
要确定一条曲线,只需知道最大加速度amax、最大减速度a’max、加加速时间t1、减加速时间t3、加减速时间t5、减减速时间t7以及额定速度V。
如图1,设定好加速度a、加加速时间t,即确定加加速度J。
加加速度确定后,实时的加速度a是对加加速度J的积分,实时的V又是对加速度a的积分,实时的S又是对速度V的积分。
以①区为例有:由此可知,速度是抛物线、直线的组合,在连接处的a保持一致,速度曲线是相切的。
PLC实现电梯运行速度曲线控制的研究
(9 2一) 男 , 南 长 葛 人 , 源 职 业 技 术 学 院 教 师 。 18 , 河 济
4 7
第1 O卷
第 1期
济 源 职业 技 术学 院学 报
J u a fJy a c t n la d T c n c lC l g o r lo i u n Vo ai a n e h i a ol n o e
目前 , 电梯 的继 电器 控 制 方式 已逐 渐 被 P C控制 L
所代替 。同时 , 由于 电 机 交 流 变频 调 速 技术 的发
展, 电梯 的拖 动方 式 已 由原 来 直 流 调 速 逐 渐过 渡 到 了交 流 变 频 调 速 。 因此 , L P C控 制 技 术 加 变 频调速 技 术 己成为 现代 电梯 行 业 的一个 热 点 。
间 t, : 速度 的变 化 开 始 减 小 , 到 t 开 始 进入 直 时 匀速运 行 段 。 由 t t 制 动减 速 段 , 运 行 过 ,为 一 其 程与启 动加 速段 对称 。由启动 加速 到制 动减速停
车 , 的运行 时 间 为 T 总 。电 梯 的 理想 速 度 曲线 为 加、 减速 的始 、 端 均呈 抛 物 线 形 , 末 中间 为 直线 的 梯 形 曲线 。
置 为 O z零 速 抱闸功 能将 影响 舒适感 ; 频器其 H, 变
零 速抱 闸 , 层精 度高 。无 须配 专用 电机 , 自学 平 可 习所配 电机 的各 个参 数 , 确 控 制 任何 品牌 的 电 精 机 。采 用高性 能 I B , 波频 率 2 K Z, 而 使 G T载 0H 从 变频 器输 出一 个不 失 真 的 正 弦 流波 形 , 电机始 使
摘
要 : 通 用 变频 器的基 础上 , 用 P C对 电梯 进行 控 制 , 过合 理 的选 择 和 设 计 , 电梯 速 度 在 采 L 通 使
电梯控制系统功能及速度曲线毕业论文
电梯控制系统功能及速度曲线毕业论文目录第1章绪论 (1)第2章方案论证 (2)2.1 基本方案概述 (2)2.1.1. 电梯变频调速控制的特点 (3)2.1.2. PLC控制电梯的特点 (3)2.2 变频器的选择 (4)2.2.1 安川VS-616G5型变频器特点 (4)2.2.2 安川VS-616G5型变频器配置 (5)2.3 可编程控制器(PLC)选择 (5)第3章系统硬件设计 (7)3.1 概述 (7)3.1.1 电梯PLC控制系统基本结构 (7)3.1.2 电梯信号控制系统组成 (7)3.1.3 电梯控制系统原理框图 (8)3.2 电梯控制系统功能及速度曲线 (9)3.2.1 电梯控制系统功能 (9)3.2.2 电梯速度给定曲线 (9)3.3 PLC输入输出信号及系统选型 (10)3.3.1 PLC输入输出信号 (10)3.3.2 PLC系统选型 (12)3.4 控制系统I/O地址分配 (13)3.5 PLC及扩展模块外部接线设计 (14)3.5.1 PLC主机外部接线设计 (14)3.5.2 扩展模块外部接线设计 (16)3.6电梯PLC系统控制电气设计 (17)第4章系统软件设计 (18)4.1 程序中使用的通用继电器及功能 (18)4.2 计数脉冲的确定 (19)4.3 基于高速计数器的相关设计 (19)4.3.1 高速计数器初始化 (19)4.3.2 轿厢所处楼层位置的确定 (22)4.3.3 门厅及轿厢处楼层显示 (23)4.3.4 减速信号的确定 (23)4.4 开关门控制 (26)4.4.1 开门控制 (26)4.4.2 关门控制 (28)4.5 呼外唤及定向信号的获取 (29)4.5.1 指令信号处理 (29)4.5.2 外召唤信号处理 (29)4.5.3 呼外唤及定向信号获取梯形图 (29)4.6 选层定向及反向截梯 (32)4.7 呼梯铃控制与故障报警 (35)第5章结论 (37)参考文献 (38)致谢 (40)附录Ⅰ (41)附录Ⅱ (46)第1章绪论自1889年美国奥梯斯升降机公司推出世界第一部以电动机为动力的升降机以来,电梯在驱动方式上经历了卷筒式驱动、牵引式驱动等历程,逐渐形成了直流电机拖动和交流电机拖动两种不同的拖动方式。
电梯速度控制曲线的改进2003版

电梯速度控制曲线的改进
金融街购物中心:孔庆有
关键词:电梯、起动、制动、曲线
引言:电梯的 0 速度 0 位移停靠,一直是自动控制领域中的热门话题,作为一个 电气方面的工程人员,在几年的工作中,有了自己的想法,结合学校里学到的知 识,对电梯速度的控制产生了新的想法,把它写出来,和大家分享。 京津动车组,27 分钟即可到达天津,假如您坐在动车上,看一下表,过去 14 分钟了,你可以断定,已经走了一半了,同样的道理,当您看见廊坊火车站, 您同样可以判断已经走一半了。与火车运动方向垂直的电梯也是,在起动时,因 为“前途无量”,自然不必考虑距离,只要舒适就可以,但是停车时就必须考虑 位置问题,不但要在 30 分钟到,而且必须到天津火车站,否则“舒适”就没有 什么意义了!
0
s1 v1dt 0.25t 3 m
0
2
2. m / s 3 a2 3 m / s 2 3. 1.5m / s 3 a3 v3 s3
t 2 0.52 s v2 3t 3 t3 2 s m / s2
2
电梯控制系统功能及速度曲线毕业论文

电梯控制系统功能及速度曲线毕业论文目录第1章绪论 (1)第2章方案论证 (2)2.1 基本方案概述 (2)2.1.1. 电梯变频调速控制的特点 (3)2.1.2. PLC控制电梯的特点 (3)2.2 变频器的选择 (4)2.2.1 安川VS-616G5型变频器特点 (4)2.2.2 安川VS-616G5型变频器配置 (5)2.3 可编程控制器(PLC)选择 (5)第3章系统硬件设计 (7)3.1概述 (7)3.1.1 电梯PLC控制系统基本结构 (7)3.1.2 电梯信号控制系统组成 (7)3.1.3 电梯控制系统原理框图 (8)3.2 电梯控制系统功能及速度曲线 (9)3.2.1 电梯控制系统功能 (9)3.2.2 电梯速度给定曲线 (9)3.3 PLC输入输出信号及系统选型 (10)3.3.1 PLC输入输出信号 (10)3.3.2 PLC系统选型 (12)3.4 控制系统I/O地址分配 (13)3.5 PLC及扩展模块外部接线设计 (14)3.5.1 PLC主机外部接线设计 (14)3.5.2 扩展模块外部接线设计 (16)3.6电梯PLC系统控制电气设计 (17)第4章系统软件设计 (18)4.1 程序中使用的通用继电器及功能 (18)4.2 计数脉冲的确定 (19)4.3 基于高速计数器的相关设计 (19)4.3.1 高速计数器初始化 (19)4.3.2 轿厢所处楼层位置的确定 (22)4.3.3 门厅及轿厢处楼层显示 (23)4.3.4 减速信号的确定 (23)4.4 开关门控制 (26)4.4.1 开门控制 (26)4.4.2 关门控制 (28)4.5 内呼外唤及定向信号的获取 (29)4.5.1 内指令信号处理 (29)4.5.2 外召唤信号处理 (29)4.5.3 内呼外唤及定向信号获取梯形图 (29)4.6 选层定向及反向截梯 (32)4.7 呼梯铃控制与故障报警 (35)第5章结论 (37)参考文献 (38)致谢 (40)附录Ⅰ (41)附录Ⅱ (46)第1章绪论自1889年美国奥梯斯升降机公司推出世界第一部以电动机为动力的升降机以来,电梯在驱动方式上经历了卷筒式驱动、牵引式驱动等历程,逐渐形成了直流电机拖动和交流电机拖动两种不同的拖动方式。
电梯运行安全评价方法和运用探究
742022年7月上 第13期 总第385期工艺设计改造及检测检修China Science & Technology Overview电梯是人们日常出行的重要交通工具,电梯运行故障的出现不仅会影响电梯的使用性能,而且也会影响到人们的生命财产安全。
为了能够保障电梯的运行安全,需要相关人员采取积极的措施对电梯进行安全管理,并在电梯运行中引入电梯运行安全评价方法,通过科学的电梯运行安全评价来防范电梯运行过程中可能出现的一系列故障,提高电梯设备的应用水平。
1.电梯运行安全评价方法的分析电梯运行安全分析方法对比研究可以从性质特点、逻辑思维方式、使用周期等方面进行研究,由此得出以下几个特点:第一,从系统安全角度进行分析考虑,具体包含定量分析和定性分析。
定性分析是对生产系统全过程状况进行全面的分析,在具体分析时所使用的方法可以是直观判断,也可以是根据自己过往的经验。
定性安全分析被广泛应用到电梯运行生产各个阶段,具体包含电梯的设计阶段、电子的制造、电梯的检验、电梯的试运行管理。
定量分析是在定性分析方法基础上,依托大量经验、实验结果来对系统的运行情况进行定量分析,从而有效判定出电梯故障的严重程度。
第二,逻辑思维方法分析。
逻辑思维方法是一种归纳方法,是根据电梯基本故障类型和失误来推断可能发生的灾害事故。
第三,从寿命周期思路分析。
电梯运行全寿命周期分析包含初始阶段的设计分析、使用过程分析评价、系统寿命完结阶段的分析[1]。
2.曳引驱动电梯的综合因素分析2.1曳引驱动电梯故障影响因素分析在挖掘电梯运行数据信息发现电梯在早上8点到10点阶段的时候很容易出现故障。
按照《电梯曳引机》的规定,机房温度在5℃~40℃。
较高的温度会对曳引机的运行产生不利的影响,电梯故障发生概率也会大大加大。
医院、住宅也是电梯故障的高发区域,住宅建筑的使用频率比较高、楼层也比较高,相应的电梯额定运行速度也会提升。
与此同时,业主装修房屋期间在搬运砂石、泥土等过程中也会诱发电梯门系统的故障。
电梯工作原理与运动分析
电梯的曳引条件
国标GB7588-2003中的规定:电梯在如下两种工作状态应保证曳引钢 丝绳在曳引轮绳槽中不出现打滑现象:
1、空载电梯在最高停站处处于上升制动状态(或下降起动状态);
2.装有125%额定载荷的电梯,在最低停站处处于下降制动状态(或上升 起动状态)。
为满足上述的曳引条件,在设计曳引系数时应按以下公式进行:
半圆形带切口槽
(4)、半圆形带切口槽的切口角β多为90~100°且不 超过120°, 国产曳引机切口角β多为90°。切口角大则 曳引能力大, 但钢丝绳与绳槽间的磨损会加剧。这种 槽形的摩擦系数比半圆形槽明显增大, 磨损却比V形减 小, 在绳槽发生磨损后仍能够保持较高的摩擦系数, 所以在电梯曳引机上得到广泛应用。
3.1 曳引式提升原理
3.1.2 液压驱动电梯
液压驱动电梯具有提升力大、运转平稳、无须将机房设置在井道上方等特
点。机房设置灵活。液压传动系统是依靠油管来传递动力的, 因此机房位置
可设置在离井道20m内的范围内,
且机房占有面积也仅4~5㎡。
低楼层建筑物采用液压电梯的总费用较低。
3.1 曳引式提升原理
3.1 曳引式提升原理
3.1.1 卷筒驱动电梯的主要缺点 5.轿厢有冲顶的危险。当轿厢或对重由于某种原因冲击底坑中的缓冲器时,
此时如果曳引机继续运转, 会使轿厢或对重继续向上运行, 造成冲顶。 6.能耗大。 由于上述这些因素, 卷筒驱动方式主要在杂物梯以及曳引电梯不适用的非
标设计的货梯中使用。而且限定, 不得载人, 额定速度不超过0.25m/s。
P = T1 - T2
此载荷力与轿厢的载重量有关,同时随电梯的运 行阶段和运行工况而变化,曳引力的具体分析如下:
电梯运行速度曲线的控制
电梯运行速度曲线的控制【摘要】电梯速度控制系统是一个复杂的系统。
本设计选取了正弦曲线作为电梯的理论运行曲线,控制方法选用了绝对距离为原则,经过多次试验,本系统基本达到预期效果,电梯运行良好,能达到电梯运行的舒适性和快速性要求,优于一般的控制方法,实现了预期目的。
标签电梯系统;正弦速度曲线;加减速控制电梯速度控制方式很大程度上决定了电梯运行的舒适性和快速性。
目前控制方式主要有以时间为原则,以相对距离为原则及以绝对距离为原则3种方式。
以时间为原则的速度控制方式是通过在制停阶段设定一个低速的爬行延时段来消除累计误差,这种延时方式本质上是一种开环控制方式,运行效率低,平层精度低。
以相对距离为原则的速度控制方式通过安装在曳引机上的增量式编码器间接获得轿厢位置,由于曳引轮和钢丝绳之间存在着打滑现象,当电梯进入减速运行时,增量式编码器的脉冲计数不能反映电梯的准确位置,所以停靠时仍然需要配合井道磁开关来运行一小段爬行距离。
在本文的系统中,绝对值编码器把井道中的实际绝对距离反馈给电梯主控制板。
主控制板根据绝对距离,实时计算电梯运行速度,控制电梯运行。
绝对值编码器不受钢丝绳打滑的影响。
同时,由它使用二进制编码形式,故不存在脉冲丢失现象。
基于以上2个优点,以绝对距离为原则的控制方式可完美实现无爬行直接停靠。
1.电梯控制系统介绍VVVF电梯控制系统主要由主控制器、变频器、曳引机及轿厢组成。
电梯主控制器主要负责处理接收来自轿厢的当前位置、运行状态、运行方向以及呼梯指令信号,并根据这些信号来判断下一站要停靠的楼层,计算需运行的距离,进而计算出目标速度,并将此速度指令发给变频器。
接通电源后,主控制器闭合主接触器MC使变频器通电,然后控制抱闸打开,并闭合变频器输出与电机问的接触器KC,之后进行转子位置初始化操作。
初始化完成后输出运行准备好信号和零速信号,同时断开KC,然后等待主控制器给出方向和运行速度信号。
主控制器先闭合主接触器KC,然后给出运行方向是上行或下行,松开抱闸,延迟之后给出速度信号。
关于电梯运行速度的优化控制
关于电梯运行速度的优化控制摘要:电梯是现代化社会必不可少的垂直运输工具,无论是在建筑,还是其他方面都起到了非常重要的作用。
在电梯运行舒适、安全的前提下,实现电梯运行速度的优化控制,成为了人们对于电梯运行的更高要求,本文便以此为基础来进行研究。
关键词:电梯;运行速度;优化控制引言随着我国现代化进程的加快,建筑业的发展,建筑高度也是在不断的提高与刷新。
对于建筑高度的不断提高,电梯已经成为了现代建筑不可或缺的一部分,做好电梯运行速度的优化控制,已成为了现代快节奏生活人们的追求之一。
1.电梯运行速度控制方式选择与运行速度曲线设计现代社会,建筑业出现了前所未有的发展速度,施工技术的提高,使得建筑的高度不断地攀升。
由于建筑高度的不断攀升,人们的生活已经越来越离不开电梯的使用。
而且现在的电梯,也更加的考虑到使用者的舒适和安全性。
当然这也是电梯发展的趋势,是人们对于生活质量要求提高,必不可少的重要因素。
但除此之外,人们对于电梯的运行速度也有了越来越高的要求,现在社会快节奏的生活,使得人们对于时间更为珍重,也更强调生活的速度化,所以对于电梯运行速度的优化控制也是十分重要的。
电梯运行速度通常有多种控制方式,但是考虑到其各自安全、稳定、舒适性等特点,绝对距离的控制方式通常更加的突出,所以本文便以绝对值编码器来实现绝对距离控制方式的速度优化。
为了电梯运行的舒适性,电梯运行速度曲线应是平滑的,所以在此我们选用正弦-直线型速度曲线,以此来确保电梯运行安全性基础上的舒适性[1]。
2.电梯运行速度的优化控制2.1电梯运行速度优化的原理与方案对于电梯运行速度优化控制的系统结构,与所使用的模块,我们通过图一来进行清晰的展示。
图1 电梯运行速度优化控制系统、模块图主控制器主要通过绝对值编码器,来实现运行速度信号对绝对值剩余距离的转化,并发送至速度优化控制模块。
速度优化控制模块一方面将变频参数传传递个主控制器,另一方面进行主控制器绝对剩余距离信息的接受,并发送给变频器,以实现电梯运行速度的控制。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
丘 =0 5x .。 . 12 =0 7 ( s, 2m/)
.
E a 12 s。 m . m/
陈 广 培 ,河 北省 特 种 设 备 学会
中国 电梯
2 1 年6 第 2 卷 01 月 2
第 1期 2 1 7
设讨研究l舀 妄 ’ 垂意 赢
速度a :12 s<1 s,最 大 加速 度 变化 率 p =10 .m/ . m/ 5 .
m/ < 1 3m / s . s 。
生 成 可采 用 模拟 量 外部 给 定ห้องสมุดไป่ตู้方式 和数 字 量选 择 的 多段 速 型 ) 举 例 。 方 式 。前 者 是 由 电梯 主 控板 的开发 者 来 设计 电 梯速 度 的
王 金 凤 ,河 北省 滦 南 县 电 力 公 司
根据 电梯运 行 舒 适性 的 要求 选取 以下参 数 。最 大 加
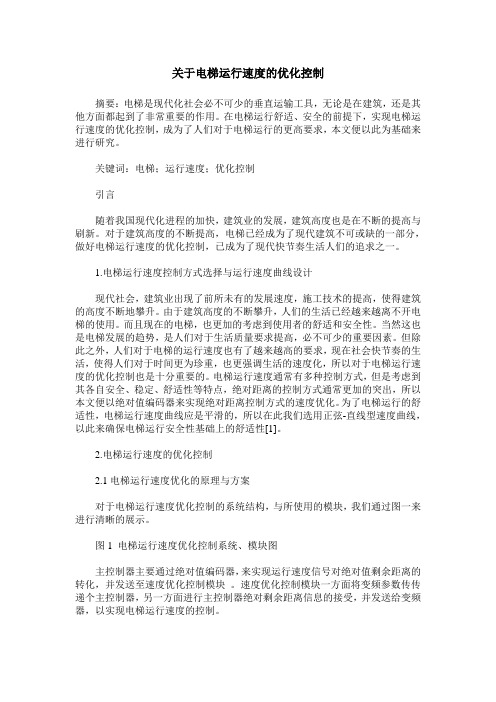
举例 说 明运行 速度指令 信号 的各段 曲线 的数学解 析式。 AE 速 度 曲线 为y= t ,这 是 一条 抛物 线 段 ;其 加 段 k
度 曲线 。该 速 度 曲线 在 转 弯处 都是 圆滑 过渡 的 ,处 处可 速 度 曲线 为a=d /t k ,是 一条 斜 线段 ;而加 加 速度 vd =2 t 导 ,以满 足 电梯 乘客 的舒 适感 要 求 。为 了便 于 分析 ,我 曲线 为 P:d/t k,是 一条水 平 的直线 段 。 ad =2 们可 以把 这 条速 度运 行 曲线分 段 释义 如 下 :启动 起 始 加 E 段 速 度 曲线 为 = + f ) F a (一 ,是 一条 斜率 为g 的 t
抛 物 线 ;将 E 段 视 为 一 条 在 E 与 AE 物 线 相 切 的 直 线 段( 代 表额 定速 度) F 点 抛 ;其加 速度 曲线 为g vd =2 ( 一 t =d /t 1 t ,
的一 部分 ;而 : F  ̄ B段 当作是 一条 反抛物 线 ,它与AE B 段抛
,
感 的 要求 。
3 电梯运 行模 拟速 度指 令信 号 曲线 的解析
如 图 1 示 ,对 于 外 部 给 定 的模 拟 速 度 指 令 信 号 ,可 所
以是 电压 型模 拟量或者 电流型 模拟量 。下面 以电压型信 号
2 电梯运 行速 度 指令 曲线 的理 想 化设计
如 图 1 示 ,AB 所 CD就 是 一 条 理 想 化 的 电梯 运 行速
是 一 条下 斜 的斜线 段 ;而加 加速 度 曲线 P…d/t ad
物线 以E 段 的中点 相对 称 ;B F C段是 电梯 匀速 运 行段 ,其 丝 ,是 一 条 水 平 的 直 线 段 。 速 度 为 电梯 的额 定 速度 ;CFED段 是 由匀速 运 行 变为 减 — 速运 行 的 曲线 段 ,通 常设计 为 与起 动段 曲线 对称 。
速段 ( AE)、匀加 速 段( F 、启动 末加 速段 ( B) 、匀 直 线段 ;其加 速 度 曲线 为a vd _ E) F =d /t a ,是 一条 水平 的直 速 运 行段 ( BC)、减 速 初 减 加速 段 ( ’ CF )、匀 减 速段 线段 ;而 加加速 度 曲线 为 P:d/t ,是 一条 与横 坐标 ad =0 ( ’ ) 、减速 末 减加 速 段 ( ’ 。对速 度 运行 曲线各 轴 重 合 的 直 线 段 。 FE’ ED) 段 进 行数 学 模型 分 析如 下 :将AE B段 的AE段 当作 一段 F F 段 速度 曲线 为y N ( 一 B =V -k t ,是一 条反抛 物 线 B
电梯运行 速度 曲线 的分析及其应用
An ls fh e dCu v } sAp , ail ay i o eSp e re l I pi t s t dt c o1
◆ 王金凤 陈广培
1 电梯运 行速 度 曲线 设计 的必 要性
电梯 作 为 一 种 交 通 工 具 ,对 于 快 速 性 、 舒 适 性 的 要 求 是 必 不 可 少 的 ,但 两 者 亦 相 矛 盾 ,过 快 的 加 速 或 减 速 、 高 速 上 升 或 下 降 会 给 电 梯 乘 客 带 来 不 适 。GB/ T 1 0 8 2 0 电梯 技 术 条件 规定 : 电梯 的起 制 动应 0 5 — 0 9 平稳 、迅速 ,加减 速 度 的最 大值 不 大于 15 s。同 时根 .m/ 据 经验 ,对 加 速 度 的 变 化 率 p一般 限 制 在 13m/ ,如 . s 果加 速 度 的 变化 率过 大会 使 乘 客大 脑感 到 晕 眩 。也就 是 模拟 指令 信 号 ;后 者 是主 控板 只 给定 速 度运 行值 ,其加 说 ,既 要 考虑 电 梯运 行 的快 速 性 ,又要 兼 顾乘 客 舒 适感 速 度 的 设 定 在 变 频 器 内部 可 供 选 择 。 的要 求 。 因此 ,有必 要科 学 地设 计 电梯 运 行速 度 的轨 迹 曲线 ,使 之 理 想化 、数字 化 ,以满 足 电梯 乘客 乘 坐舒 适
() 物 线 AE : 1抛 段
a=d /t kt v d =2 . p :d / t k=p , a d =2
七=p 2 102 =05m/ ) / =(./) .( s 。 对 于E : 点 = E2 a P a /k= / =1 /. =1 ( , . 10 . s 2 2)
通 过 上 面 的 解 析 式 , 根 据 电 梯 标 准 的 规 定 和 实 际 设
计 的 需要 ,能够 求 出各 段 曲线 的参 数表 征值 。下面 以设
.0 s 抛 根据 目前 常 用 电梯 变频 器 的特 点 ,速 度 指令 信 号 的 计 一 条 额 定 速 度 为25 m/的 起 动段 速 度 曲线 ( 物 线