最新利用MATLAB实现极点配置、设计状态观测器现代控制
现代控制理论实验报告
现代控制理论实验报告现代控制理论实验报告组员:院系:信息工程学院专业:指导老师:年月日实验1 系统的传递函数阵和状态空间表达式的转换[实验要求]应用MATLAB 对系统仿照[例]编程,求系统的A 、B 、C 、阵;然后再仿照[例]进行验证。
并写出实验报告。
[实验目的]1、学习多变量系统状态空间表达式的建立方法、了解系统状态空间表达式与传递函数相互转换的方法;2、通过编程、上机调试,掌握多变量系统状态空间表达式与传递函数相互转换方法。
[实验内容]1 设系统的模型如式示。
p m n R y R u R x DCx y Bu Ax x ∈∈∈??+=+=&其中A 为n ×n 维系数矩阵、B 为n ×m 维输入矩阵 C 为p ×n 维输出矩阵,D 为传递阵,一般情况下为0,只有n 和m 维数相同时,D=1。
系统的传递函数阵和状态空间表达式之间的关系如式示。
D B A SI C s den s num s G +-==-1)()()(()(式中,)(s num 表示传递函数阵的分子阵,其维数是p ×m ;)(s den 表示传递函数阵的按s 降幂排列的分母。
2 实验步骤① 根据所给系统的传递函数或(A 、B 、C 阵),依据系统的传递函数阵和状态空间表达式之间的关系如式,采用MATLA 的编程。
注意:ss2tf 和tf2ss 是互为逆转换的指令;② 在MATLA 界面下调试程序,并检查是否运行正确。
③ [] 已知SISO 系统的状态空间表达式为,求系统的传递函数。
,2010050010000100001043214321u x x x x xx x x ?-+-=????????????&&&&[]???=43210001x x x x y程序:A=[0 1 0 0;0 0 -1 0;0 0 0 1;0 0 5 0]; B=[0;1;0;-2]; C=[1 0 0 0]; D=0;[num,den]=ss2tf(A,B,C,D,1)程序运行结果:num =0 den =0 0 0从程序运行结果得到:系统的传递函数为:24253)(ss s S G --= ④ [] 从系统的传递函数式求状态空间表达式。
现代控制理论的MATLAB实现

现代控制理论的MATLAB实现现代控制理论是控制工程中一门重要的学科,它研究如何设计和分析控制系统以满足一定的性能指标。
MATLAB是一种功能强大的科学计算和工程仿真软件,广泛应用于控制系统设计与分析。
本文将介绍现代控制理论的一些常见方法在MATLAB中的实现。
1.线性系统的状态空间表示线性系统的状态空间表示是现代控制理论的核心内容之一、在MATLAB中,可以使用`ss`命令创建线性系统的状态空间模型。
例如,假设存在一个二阶线性时不变系统,其传递函数为:可以使用以下代码将其转换为状态空间模型:```matlabnum = [1];den = [1, 1, 1];sys = tf(num, den);ss_sys = ss(sys);```2.线性系统的传递函数表示传递函数是描述线性系统输入输出关系的一种常用表示方法。
在MATLAB中,可以使用`tf`命令创建线性系统的传递函数模型。
例如,假设存在一个二阶线性时不变系统,其状态空间描述为:```matlabA=[0,1;-1,-1];B=[0;1];C=[1,0];D=0;ss_sys = ss(A, B, C, D);```可以使用以下代码将其转换为传递函数模型:```matlabtf_sys = tf(ss_sys);```3.常见控制器的设计与分析现代控制理论中常用的控制器设计方法包括PID控制器、根轨迹法、频率域分析等。
在MATLAB中,可以使用`pid`命令创建PID控制器,并使用`rlocus`命令绘制根轨迹图。
例如,创建一个PID控制器:```matlabKp=1;Kd=0.1;pid_controller = pid(Kp, Ki, Kd);```绘制根轨迹图:```matlabsys = tf([1], [1, 1, 1]);rlocus(sys);```4.系统的频率响应分析频率响应分析是现代控制理论中常用的系统性能评估方法之一、在MATLAB中,可以使用`bode`命令绘制系统的频率响应曲线。
现代控制理论基础实验指导书200
现代控制理论基础实验指导书实验一:控制系统模型转换一、实验目的1.掌握控制系统模型转换,并使用计算机仿真软件验证。
2.学习并会简单应用MATLAB软件。
二、实验器材[1] 微型计算机[2] MATLAB软件三、实验要求与任务1.设系统的零极点增益模型为,求系统的传递函数及状态空间模型。
解:在MATLAB软件中,新建m文件,输入以下程序后保存并运行。
%Example 1%k=6;z=[-3];p=[-1,-2,-5];[num,den]=zp2tf(z,p,k)[a,b,c,d]=zp2ss(z,p,k)其中:zp2tf函数——变零极点表示为传递函数表示zp2ss函数——变零极点表示为状态空间表示记录实验结果,并给出系统的传递函数及状态空间模型。
2.给定离散系统状态空间方程求其传递函数模型和零极点模型,并判断其稳定性。
解:在MATLAB软件中,新建m文件,输入以下程序后保存并运行。
%Example 2%a=[ 0 0 ; 0 0 0; ;0 0 0];b=[1;0;1;0];c=[0,0,0,1];d=[0];[num,den]=ss2tf(a,b,c,d)[z,p,k]=ss2zp(a,b,c,d)pzmap(p,z)title('Pole-zero Map')其中:ss2tf函数——变状态空间表示为传递函数表示ss2zp函数——变状态空间表示为零极点表示pzmap ——零极点图记录实验结果,并给出系统的传递函数模型和零极点模型;绘出图形,并判断系统稳定性。
3.已知系统的传递函数为,求系统的零极点增益模型及状态空间模型。
tf2zp函数——变系统传递函数形式为零极点增益形式tf2ss函数——变系统传递函数形式为状态空间表示形式编写程序,记录实验结果,并给出系统的状态空间模型和零极点模型。
4.已知系统状态空间表达式为ss2tf函数——变状态空间表示为传递函数表示ss2zp函数——变状态空间表示为零极点表示编写程序,记录实验结果,并给出系统传递函数模型和零极点模型。
利用MATLAB 实现极点配置、设计状态观测器(现代控制)
订 线实 验 报 告实验名称 利用MATLAB 实现极点配置、设计状态观测器系 专业 自动化 班 姓名 学号 授课老师 预定时间实验时间实验台号一、目的要求1、掌握状态反馈和输出反馈的概念及性质。
2、掌握利用状态反馈进行极点配置的方法。
学会用MATLAB 求解状态反馈矩阵。
3、掌握状态观测器的设计方法。
学会用MATLAB 设计状态观测器。
4、熟悉分离定理,学会设计带有状态观测器的状态反馈系统。
二、原理简述1、状态反馈和输出反馈设线性定常系统的状态空间表达式为Cxy Bu Ax x=+=如果采用状态反馈控制规律u= r-Kx ,其中 r 是参考输入,则状态反馈闭环系统的传递函数为:B BK A sIC G k 1)]([---=2、极点配置如果 SISO 线性定常系统完全能控,则可通过适当的状态反馈, 将闭环系统极点配置到任意期望的位置。
MATLAB 提供的函数acker( )是用Ackermann 公式求解状态反馈阵K 。
该函数的调用格 式为K=acker(A,B,P)其中A 和B 分别为系统矩阵和输入矩阵。
P 是期望极点构成的向量。
MATLAB 提供的函数place( )也可求出状态反馈阵K 。
该函数的调用格式为 K=place(A,B,P)函数place( )还适用于多变量系统极点配置,但不适用含有多重期望极点的问题。
函数acker( )不适用于多变量系统极点配置问题,但适用于含有多重期望极点问题。
三、仪器设备PC 计算机,MATLAB 软件[0410x y ⎢=⎢⎢--⎣=理想闭环系统的极点为(1)采用直接计算法进行闭环系统极点配置;(2)采用Ackermann订 线y1=lsim(G,u,t); plot(t,y1,':',t,y2,'-')蓝色为配置前,绿色为配置后题5-3 某系统状态空间描述如下[]010100134326100x x u y x⎡⎤⎡⎤⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥----⎣⎦⎣⎦= 设计全维状态观测器,要求状态观测器的极点为[]123---。
matlab仿真毕设--倒立摆现代控制理论研究
内蒙古科技大学本科生毕业设计说明书(毕业论文)题目:倒立摆现代控制理论研究倒立摆现代控制理论研究摘要倒立摆系统是一个复杂的非线性、强耦合、多变量和自不稳定系统。
在控制工程中,它能有效地反映诸如可镇定性、鲁棒性、随动性以及跟踪性等许多控制中的关键问题,是检验各种控制方法的理想工具。
理论是工程的先导,它对倒立摆系统的控制研究具有重要的工程背景,单级倒立摆与火箭的飞行有关,二级倒立摆与双足机器人的行走有相似性,日常生活中的任何重心在上,支点在下的问题都与倒立摆的控制有极大的相似性,所以对倒立摆的稳定控制有重大的现实意义。
迄今,人们已经利用古典控制理论、现代控制理论及多重智能控制理论实现了多种倒立摆系统的稳定控制[5]。
倒立摆的控制方法有很多,如状态反馈控制,经典PID控制,神经网络控制,遗传算法控制,自适应控制,模糊控制等。
其控制方法已经在军工、航天、机器人和一般工业过程等领域得到了应用。
因此对倒立摆系统的控制研究具有重要的理论和现实意义,成为控制领域中经久不衰的研究课题。
本文是应用线性系统理论中的极点配置、线性二次型最优(LQR)和状态观测器等知识,设计了倒立摆系统线性化模型的控制器,通过MA TLAB仿真,研究其正确性和有效性。
通过分析仿真结果,我们知道了,状态反馈控制可以使倒立摆系统很好的控制在稳定状态,并具有良好的鲁棒性。
关键词:倒立摆;现代控制;Matlab仿真;Modern Control Theory Of Inverted PendulumAbstractInverted pendulum system is a complex nonlinear and strongly coupled,multi-variable and unstable system since.In control engineering,it can effectively reflect such stabilization,robustness,with the mobility of control and tracking,and many other key issue,It is the test ideal for a variety of control methods.Theory is the project leader,inverted pendulum control system also has important engineering research background,inverted pendulum with single-stage related torocket for the flight,Inverted pendulum and biped walking robot similar nature in any life in the center of gravity,the fulcrum in the next issue with the inverted pendulum control has a great similarity,so the stability control of inverted pendulum significant practical significance.So far,it has been the use of classical control theory,modern control theory and control theory of multiple intelligence to achieve a variety of inverted pendulum system stability control[5].Inverted pendulum control methods there are many,such as the state feedback control,the classic PID control,neural network control,genetic algorithm control,adaptive control,fuzzy control.The control method has been in military,aerospace,robotics and general industrial processes and other areas have been intended use.Therefore,the control of inverted pendulum system research has important theoretical and practical significance,of becoming enduring research topics in the field.This is the application of the theory of linear systems pole placement,linear quadratic optimal (LQR) and the state observer of such knowledge,the design of the linear inverted pendulum model of the controller,through simulation to study the correctness and effective sex.By analyzing the results of MATLAB simulation,state feedback control can make a goodcontrol of inverted pendulum system in a stable state,and has good robustness,stability control features.Key words: Inverted pendulum;Modern control;Matlab simulation;目录摘要 (I)Abstract (II)第一章绪论 (1)1.1倒立摆系统模型简介 (1)1.2倒立摆研究的背景与意义 (2)1.3国内外研究现状、水平和发展趋势 (3)1.3.1倒立摆和控制理论的发展 (3)1.3.2倒立摆的控制方法 (4)1.3.3倒立摆的发展趋势 (5)1.4本论文的主要工作介绍 (6)第二章一级倒立摆的数学模型建立及其性能分析 (7)2.1 系统的组成 (7)2.2 一级倒立摆数学模型的建立 (8)2.2.1 数学模型的建立 (8)2.2.2 系统的结构参数 (9)2.2.3 用牛顿力学方法来建立系统的数学模型 (9)2.2.4 一级倒立摆的性能分析[7] (13)2.3 本章小结 (15)第三章现代控制理论在倒立摆控制中的应用 (16)3.1 自动控制理论的发展历程 (16)3.2 经典控制理论 (18)3.2.1 PID控制现状 (18)3.2.2 PID控制的基本原理 (18)3.2.3 常用PID数字控制系统 (20)3.3 现代控制理论 (21)3.3.1 极点配置[11] (22)3.3.2 线性二次型最优的控制理论[7,8] (24)3.3.3 加权矩阵的选取 (26)3.3.4 状态观测器[7] (26)3.4 本章小结 (29)第四章MA TLAB仿真技术 (30)4.1 仿真软件——Matlab简介 (30)4.1.1 MA TLAB的优势 (30)4.2 Simulink简介 (32)4.3 S-函数简介 (33)4.3.1 用M文件创建S-函数 (34)4.4 倒立摆仿真模块的建立 (36)4.5 本章小结 (37)第五章一级倒立摆线性模型系统的仿真 (38)5.1 倒立摆控制器结构选择 (38)5.2 一级倒立摆线性模型系统仿真 (38)5.2.1 Simulink仿真 (42)5.3 本章小结 (46)结束语 (48)参考文献 (49)附录A (51)致谢 (53)第一章绪论1.1倒立摆系统模型简介倒立摆控制系统是一个复杂的、不稳定的、非线性的系统,是进行控制理论教学及开展各种控制实验的理想实验平台,但它并不是我们想象的那样抽象,其实在我们日常生活中就有很多这样的例子。
基于matlab的状态观测器设计
基于MATLAB 的状态观测器设计预备知识: 极点配置基于状态反馈的极点配置法就是通过状态反馈将系统的闭环极点配置到期望的极点位置上,从而使系统特性满足要求。
1. 极点配置原理假设原系统的状态空间模型为:⎩⎨⎧=+=Cxy Bu Ax x 若系统是完全可控的,则可引入状态反馈调节器,且:Kx u input -=这时,闭环系统的状态空间模型为:⎩⎨⎧=+-=Cxy Bu x )BK A (x 2. 极点配置的MATLAB 函数 在MATLAB 控制工具箱中,直接用于系统极点配置的函数有acker()和place()。
调用格式为:K=acker(A,C,P) 用于单输入单输出系统其中:A ,B 为系统矩阵,P 为期望极点向量,K 为反馈增益向量。
K=place(A,B,P)(K,prec,message)=place(A,B,P)place()用于单输入或多输入系统。
Prec 为实际极点偏离期望极点位置的误差;message 是当系统某一非零极点偏离期望位置大于10%时给出的警告信息。
3. 极点配置步骤:(1)获得系统闭环的状态空间方程;(2)根据系统性能要求,确定系统期望极点分布P ;(3)利用MATLAB 极点配置设计函数求取系统反馈增益K ; (4)检验系统性能。
已知系统模型如何从系统的输入输出数据得到系统状态?初始状态:由能观性,从输入输出数据确定。
不足:初始状态不精确,模型不确定。
思路:构造一个系统,输出逼近系统状态称为是的重构状态或状态估计值。
实现系统状态重构的系统称为状态观测器。
观测器设计状态估计的开环处理:但是存在模型不确定性和扰动!初始状态未知!应用反馈校正思想来实现状态重构。
通过误差来校正系统:状态误差,输出误差。
基于观测器的控制器设计系统模型若系统状态不能直接测量,可以用观测器来估计系统的状态。
L是观测器增益矩阵,对偏差的加权。
真实状态和估计状态的误差向量误差的动态行为:的极点决定了误差是否衰减、如何衰减?通过确定矩阵L来保证。
实验2 利用MATLAB判断系统的稳定性
G=Gt' (3)极点配置状态反馈系统的实现 根据(2)中的运行结果,用 SIMULINK 搭建仿真模型,实现极点配置状态反馈系统,绘制 系统的单位阶跃响应曲线
Step 1
x2 1 s Integrator 4
3
Gain 9
1 Gain 11
3 Gain 12
x1 1 s
Integrator 5
2 Gain 10
x
0 2
1 3
x
0 1u
y 1 0
K=
31
G=
9
7
三
:
示
波
器
图
形
四: a:
b
:
五:
(2)实验体会。
1:带有状态观测器的状态反馈系统在不同初始条件下更加稳定,反馈平稳,图像更加平缓, 稳定性更强。 2:初始状态值越大,系统稳定性 越低,、反馈时间越长,系统平稳所需时间越长。
[z,p,k]=ss2zp(A,B,C,D,1)
z= -4.3028 -0.6972
p= -1.6506 -0.1747 + 1.5469i -0.1747 - 1.5469i
k= 1
二:已知系统的状态方程和输出方程如下,用状态反馈使闭环系统的极点为-2+j、-2-j,
由于状态变量不能量测,设计状态观测器使观测器的极点为-6,-6
2 Gain 4
4 Out 4
Scope
4.实验报告: (1)写出将实验内容的程序和运行结果。
0 1 0 1
x 一:)判定系统的稳定性
0
0
1
x
现代控制理论实验内容
现代控制理论实验一一、实验目的:1.熟悉MATLAB,掌握Simulink 工具的使用方法;2.根据传递函数设计出对应的能控、串联结构图;3.掌握极点配置状态反馈方法设计控制器技术;4.学会设计全维观测器。
二、实验内容: 已知系统传递函数)3)(2()1(6)(+++=s s s s s W 1. 用Simulink 对该系统进行实现(1)能控性实现(2)串联实现2. 以上述系统的串联实现为基础,实验研究:(1)系统在初始条件作用下的状态响应和输出响应(2)系统在阶跃输入信号作用下的状态响应和输出响应(3)分析系统在状态空间坐标原点的稳定性3. 以上述系统的能控实现为基础,设计状态反馈控制器要求:系统输出的最大超调量8.16%=δ,调节时间1=s t 秒仿真分析系统的实际工作效果,由系统输出的实际阶跃响应曲线计算最 大超调量、调节时间、稳态误差等系统的性能参数分析该系统在输出比例控制下是否会存在稳态误差?状态反馈控制下是否会存在稳态误差?分析出现这种差异的原因,讨论消除状态反馈稳态误差的方 法。
4. 以上述系统的串联实现为基础,设计系统的全维状态观测器,观测器极点全为-4。
仿真分析在原系统和观测器系统初始条件相同和不同时,观测状态与原状态变量的差值随时间变化的情况,例如改变观测器极点配置到-9,结果有何不同?5. 结合以上 3、4 的结果,应用观测状态实现状态反馈控制对比分析实际状态反馈与观测状态反馈系统控制效果的异同三、实验装置:1.微型计算机2.实验平台采用MATLAB 及Simulink 工具四、实验数据及分析1.(1)能控性实现根据状态空间表达式直接写出系统的能控标准I 型:[]066,100560100010=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=y u x x输出响应:(2)串联实现输出响应:2.(1)初始条件下的状态响应和输出响应:状态响应:输出响应:(2)阶跃信号作用下的状态响应和输出响应:状态响应:输出响应:分析系统在坐标原点的稳定性:在(1)中设置的初始值为1,1,1,由状态响应曲线可以看出X1并不能最终稳定在零点,其他两条输出曲线虽可稳定,但系统仍可认为在原点处是不稳定的。
现代控制实验状态反馈器和状态观测器的设计

现代控制实验状态反馈器和状态观测器的设计现代控制实验中,状态反馈器和状态观测器是设计系统的重要组成部分。
状态反馈器通过测量系统的状态变量,并利用反馈回路将状态变量与控制输入进行耦合,以优化系统的性能指标。
状态观测器则根据系统的输出信息,估计系统的状态变量,以便实时监测系统状态。
本文将分别介绍状态反馈器和状态观测器的设计原理和方法。
一、状态反馈器的设计:状态反馈器的设计目标是通过调整反馈增益矩阵,使得系统的状态变量在给定的性能要求下,达到所需的一组期望值。
其设计步骤如下:1.系统建模:通过对被控对象进行数学建模,得到描述系统动态行为的状态空间表达式。
通常表示为:ẋ=Ax+Buy=Cx+Du其中,x为系统状态向量,u为控制输入向量,y为系统输出向量,A、B、C、D为系统的状态矩阵。
2.控制器设计:根据系统的动态性能要求,选择一个适当的闭环极点位置,并计算出一个合适的增益矩阵。
常用的设计方法有极点配置法、最优控制法等。
3.状态反馈器设计:根据控制器设计得到的增益矩阵,利用反馈回路将状态变量与控制输入进行耦合。
状态反馈器的输出为:u=-Kx其中,K为状态反馈增益矩阵。
4.性能评估与调整:通过仿真或实验,评估系统的性能表现,并根据需要对状态反馈器的增益矩阵进行调整。
二、状态观测器的设计:状态观测器的设计目标是根据系统的输出信息,通过一个状态估计器,实时估计系统的状态变量。
其设计步骤如下:1.系统建模:同样地,对被控对象进行数学建模,得到描述系统动态行为的状态空间表达式。
2.观测器设计:根据系统的动态性能要求,选择一个合适的观测器极点位置,以及一个合适的观测器增益矩阵。
常用的设计方法有极点配置法、最优观测器法等。
3.状态估计:根据观测器设计得到的增益矩阵,通过观测器估计系统的状态变量。
状态观测器的输出为:x^=L(y-Cx^)其中,L为观测器增益矩阵,x^为状态估计向量。
4.性能评估与调整:通过仿真或实验,评估系统的状态估计精度,并根据需要对观测器的增益矩阵进行调整。
现代控制实验--状态反馈器和状态观测器的设计

现代控制实验--状态反馈器和状态观测器的设计-CAL-FENGHAI-(2020YEAR-YICAI)_JINGBIAN状态反馈器和状态观测器的设计一、实验设备PC 计算机,MATLAB 软件,控制理论实验台,示波器二、实验目的(1)学习闭环系统极点配置定理及算法,学习全维状态观测器设计法;(2)掌握用极点配置的方法(3)掌握状态观测器设计方法(4)学会使用MATLAB工具进行初步的控制系统设计三、实验原理及相关知识(1)设系统的模型如式所示若系统可控,则必可用状态反馈的方法进行极点配置来改变系统性能。
引入状态反馈后系统模型如下式所示:(2)所给系统可观,则系统存在状态观测器四、实验内容(1)某系统状态方程如下10100134326x x u •⎡⎤⎡⎤⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥----⎣⎦⎣⎦[]100y x =理想闭环系统的极点为[]123---.(1)采用 Ackermann 公式计算法进行闭环系统极点配置;代码:A=[0 1 0;0 0 1;-4 -3 -2];B=[1; 3; -6];P=[-1 -2 -3];K=acker(A,B,P)Ac=A-B*Keig(Ac)(2)采用调用 place 函数法进行闭环系统极点配置;代码:A=[0 1 0;0 0 1;-4 -3 -2];B=[1;3;-6];eig(A)'P=[-1 -2 -3];K=place(A,B,P)eig(A-B*K)'(3)设计全维状态观测器,要求状态观测器的极点为[]---123代码:a=[0 1 0;0 0 1;-4 -3 -2];b=[1;3;-6];c=[1 0 0];p=[-1 -2 -3];a1=a';b1=c';c1=b';K=acker(a1,b1,p);h=(K)'ahc=a-h*c(2)已知系统状态方程为:10100134326x x u •⎡⎤⎡⎤⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥----⎣⎦⎣⎦[]100y x =(1)求状态反馈增益阵K ,使反馈后闭环特征值为[-1 -2 -3];代码:A=[0 1 0;0 0 1;4 -3 -2];b=[1;3;-6];p=[-1 -2 -3];k=acker(A,b,p)A-b*keig(A-b*k)(2)检验引入状态反馈后的特征值与希望极点是否一致。
基于MATLAB平台的现代控制理论研究

c mp e e so fs se c n e t n he c mb n to fmo e c nr lt o n o r h n in o y t m o c p ,a d t o i ain o d m o to he r a d MATL y AB
wilo ti o d ta h n f c . l b an a g o e c i g ef t e
C ia 2 R rl f c, uuC u t R rl o e C m ayLm t , uuJl 3 20 C ia h ; . ua O e F y ony ua P wr o p n iid F y in1 10 , h ) n f i e i n
Absr c Mo e c n r lt e r sa mp ra tp oe so lb sc c u s n t e rl td s e i l t a t: d m o to h oy i n i ot n r f sina a i o re i h ea e p ca —
能观 测 性 的基 本 性 质 , 以及 对 稳 定性 的分 析 和 系统
数学 圈 。M T A A L B语 言能 用简单 的命令 给 出状 态 空 间模 型 以及 能控 性 和能 观测 性 , 析 系 统 稳定 性 时 分
的综合 , 也就 是状态 反馈 和状 态观 测器 的设计 , 同时 掌握 最优控 制 的问题 。 在本 门课 程 的学 习过 程 中 , 用 的数 学 工 具 最 应
收 稿 日期 :0 0 9 .0 2 1 46 2
也 可用直 观 的图形来 描述 系统 的稳定 性 。我 们要 改 变传 统 中过分 突 出数 学分 析和 变换 而掩 盖 本 质 内容 的缺 点 , 学 生 明确 分 析 目的 , 住 重 点 , 高 分 析 使 抓 提 问题 的能力 , 实现数学 概念 、 理概 念 和工 程 概念 的 物 统 一 , 导 学生 学 习使用 计 算 机 进行 实 际 的 分析 和 引 处 理 , 现理论 与实 际 的紧密结 合 , 分培 养 学生 利 实 充 用理 论分 析 问题 、 解决 问题 的能 力 。 针 对 以上 的思路 , 在 教 学 过程 中 针对 本 门课 拟 程 本 科 阶段 教 学 大 纲提 出的 重点 问题 , 状 态空 间 如 模 型 , 统 的求 解 问 题 , 系 以及 系 统 的 能 控 性 和 能 观 性, 系统 的李雅 普诺 夫稳定 性分 析 , 系统 的极 点 配置 和观测 器 设计 等 主要 问题 建立 MA L B平 台 , 示 TA 演 相 应 的概念定 理方 法 , 深学生 对抽 象 问题 的理 解 。 加
现代控制理论实验报告

现代控制理论实验报告学院:机电学院学号:XXXXX姓名:XXXXX班级:XXXX实验一 系统的传递函数阵和状态空间表达式的转换一、实验目的1.熟悉线性系统的数学模型、模型转换。
2.了解MATLAB 中相应的函数 二、实验内容及步骤 1.给定系统的传递函数为1503913.403618)(23++++=s s s s s G 要求(1)将其用Matlab 表达;(2)生成状态空间模型。
2.在Matlab 中建立如下离散系统的传递函数模型y (k + 2) +5y (k +1) +6y (k ) = u (k + 2) + 2u (k +1) +u (k ) 3.在Matlab 中建立如下传递函数阵的Matlab 模型⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+++++++++++=726611632256512)(2322s s s s s s s s s s s s G 4.给定系统的模型为)4.0)(25)(15()2(18)(++++=s s s s s G求(1)将其用Matlab 表达;(2)生成状态空间模型。
5.给定系统的状态方程系数矩阵如下:[]0,360180,001,0100011601384.40==⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=D C B A用Matlab 将其以状态空间模型表示出来。
6.输入零极点函数模型,零点z=1,-2;极点p=-1,2,-3 增益k=1;求相应的传递函数模型、状态空间模型。
三、实验结果及分析 1. 程序代码如下:num = [18 36];den = [1 40.3 391 150]; tf(num,den) ss(tf(num,den))Transfer function:18 s + 36----------------------------s^3 + 40.3 s^2 + 391 s + 150a =x1 x2 x3x1 -40.3 -24.44 -2.344x2 16 0 0x3 0 4 0b =u1x1 1x2 0x3 0c =x1 x2 x3y1 0 1.125 0.5625d =u1y1 0Continuous-time model.2.2.程序代码如下:num=[1 2 1];den=[1 5 6];tf(num,den,-1)运行结果:Transfer function:z^2 + 2 z + 1-------------z^2 + 5 z + 6Sampling time: unspecified3.程序代码如下:num={[1 2 1],[1 5];[2 3],[6]};den={[1 5 6],[1 2];[1 6 11 6],[2 7]};tf(num,den)Transfer function from input 1 to output...s^2 + 2 s + 1#1: -------------s^2 + 5 s + 62 s + 3#2: ----------------------s^3 + 6 s^2 + 11 s + 6Transfer function from input 2 to output...s + 5#1: -----s + 26#2: -------2 s + 74. 程序代码如下:sys=zpk(-2,[-15 -25 -0.4],18)ss(sys)运行结果:1)Zero/pole/gain:18 (s+2)---------------------(s+15) (s+25) (s+0.4)2)a =x1 x2 x3x1 -0.4 1.265 0x2 0 -15 1x3 0 0 -25b =u1x1 0x2 0x3 8c =x1 x2 x3y1 2.846 2.25 0d =u1y1 0Continuous-time model.5.程序代码如下:A=[-40.4 -138 -160;1 0 0;0 1 0];B=[1 0 0]';C=[0 18 360];D=0;ss(A,B,C,D)运行结果:a =x1 x2 x3x1 -40.4 -138 -160x2 1 0 0x3 0 1 0b =u1x1 1x2 0x3 0c =x1 x2 x3y1 0 18 360d =u1y1 0Continuous-time model.6. 程序代码如下:sys=zpk([1 -2],[-1 2 -3],1) tf(sys)ss((sys)运行结果:Zero/pole/gain:(s-1) (s+2)-----------------(s+1) (s+3) (s-2)Transfer function:s^2 + s - 2---------------------s^3 + 2 s^2 - 5 s - 6a =x1 x2 x3x1 -1 2.828 1.414x2 0 2 2x3 0 0 -3b =u1x1 0x2 0x3 2c =x1 x2 x3y1 -0.7071 1 0.5d =u1y1 0Continuous-time model.四、实验总结本次实验主要是熟悉利用matlab建立线性系统数学模型以及模型间的相应转换(如状态空间、传递函数模型等)、并了解matlab中相应函数的使用,如tf、ss、zp2ss、ss2tf等。
现代控制理论状态反馈和状态观测器的设计实验报告

现代控制理论状态反馈和状态观测器的设计实验报告本次实验是关于现代控制理论中状态反馈与状态观测器的设计与实现。
本次实验采用MATLAB进行模拟与仿真,并通过实验数据进行验证。
一、实验目的1、学习状态反馈控制的概念、设计方法及其在实际工程中的应用。
3、掌握MATLAB软件的使用方法。
二、实验原理1、状态反馈控制状态反馈控制是指将系统状态作为反馈控制的输出,通过对状态反馈控制器参数的设计,使系统的状态响应满足一定的性能指标。
状态反馈控制的设计步骤如下:(1) 确定系统的状态方程,即确定系统的状态矢量、状态方程矩阵和输出矩阵;(2) 设计状态反馈控制器的反馈矩阵,即确定反馈增益矩阵K;(3) 检验状态反馈控制器性能是否满足要求。
2、状态观测器(1) 确定系统的状态方程;(2) 设计观测器的状态估计矩阵和输出矩阵;(3) 检验观测器的状态估计精度是否符合标准。
三、实验内容将简谐信号加入单个质点振动系统,并对状态反馈控制器和状态观测器进行设计与实现。
具体实验步骤如下:1、建立系统状态方程:(1)根据系统的物理特性可得单自由度振动系统的运动方程为:m¨+kx=0(2)考虑到系统存在误差、干扰等因素,引入干扰项,得到系统状态方程:(3)得到系统状态方程为:(1)观察系统状态方程,可以发现系统状态量只存在于 m 行 m 到 m 行 n 之间,而控制量只存在于 m 行 1 到 m 行 n 之间,满足可控性条件。
(2)本次实验并未给出状态变量的全部信息,只给出了系统的一维输出,因此需要设计状态反馈器。
(3)我们采用极点配置法进行状态反馈器设计。
采用 MATLAB 工具箱函数,计算出极点:(4) 根据极点求解反馈矩阵,得到状态反馈增益矩阵K:(1)通过矩阵计算得到系统的可观性矩阵:(2)由若干个实测输出建立观测器,可将观测器矩阵与可观测性矩阵组合成 Hankel 矩阵,求解出状态观测器系数矩阵:(3)根据系统的状态方程和输出方程,设计观测方程和状态估计方程,如下:4、调试控制器和观测器(1)经过上述设计步骤,将反馈矩阵和观测矩阵带入 MATLAB 工具箱函数进行仿真。
在MATLAB中使用状态空间模型进行设计
在MATLAB中使用状态空间模型进行设计MATLAB是一种功能强大的计算机工具,可以用于各种科学计算、数据可视化和算法开发等任务。
在控制系统设计中,MATLAB也是一个重要的工具,可以用来建立和分析控制系统模型。
其中,状态空间模型是一种常用的表示方法,可以描述系统的动态行为和状态变化。
状态空间模型是一种数学模型,用一组微分方程描述系统的动态行为。
它通过将系统内部的状态变量以及输入和输出变量进行关联,来描述系统的演化过程。
状态空间模型可以用矩阵形式表示,这种表示方法直观而且方便进行计算。
在MATLAB中,可以使用StateSpace类来构建状态空间模型。
StateSpace类可以接受系统的系数矩阵作为输入,然后根据这些系数矩阵构建一个状态空间模型对象。
这个对象可以用来进行模型分析、设计和模拟等操作。
下面我们将介绍一些常用的MATLAB函数和命令,帮助读者了解如何在MATLAB中使用状态空间模型进行设计。
首先,我们可以使用`ss`函数来创建一个状态空间模型对象。
这个函数可以接受系统的系数矩阵作为输入,然后返回一个StateSpace对象。
例如,我们可以使用如下命令创建一个二阶系统的状态空间模型:```matlabA = [0 1; -1 -1];B = [0; 1];C = [1 0];D = 0;sys = ss(A, B, C, D);```在上述代码中,矩阵A、B、C和D分别表示系统的状态方程、输入矩阵、输出矩阵和直接传递矩阵。
通过使用`ss`函数,我们可以将这些矩阵传递给StateSpace对象,并得到一个表示系统的状态空间模型对象sys。
接下来,我们可以使用MATLAB提供的函数和方法来对状态空间模型进行各种操作。
例如,我们可以使用`tf`函数将状态空间模型转换为传输函数模型。
传输函数模型是一种常用的控制系统表示方法,可以用来分析系统的频率响应和稳定性等特性。
下面是一个将状态空间模型转换为传输函数模型的示例代码:```matlabtf_sys = tf(sys);```在上述代码中,我们使用`tf`函数将状态空间模型sys转换为传输函数模型tf_sys。
利用MATLAB设计状态观测器
执行以上程序可得:
⎡ 16.855 ⎤
L
=
⎢⎢147.3875
⎥ ⎥
⎢⎣544.3932⎥⎦
相应的全维观测器是:
x&% = ( A − LC)x% + Bu + Ly
⎛⎡ 0
1
0 ⎤ ⎡ 16.855 ⎤
⎞ ⎡ 0 ⎤ ⎡ 16.855 ⎤
=
⎜ ⎜
⎢ ⎢
0
0
1
⎥ ⎥
−
⎢⎢147.3875⎥⎥
[1
0
0]⎟⎟
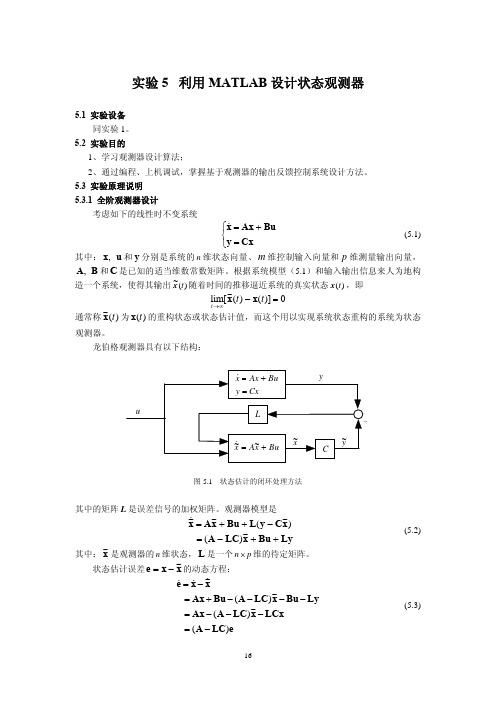
t→∞
通常称 ~x(t) 为 x(t) 的重构状态或状态估计值,而这个用以实现系统状态重构的系统为状态
观测器。
龙伯格观测器具有以下结构:
x& = Ax + Bu
y
y = Cx
u
L
-
~x& = A~x + Bu ~x
~y C
图 5.1 状态估计的闭环处理方法
其中的矩阵 L 是误差信号的加权矩阵。观测器模型是
由于
~x
=
⎡xa ⎢⎣~xb
⎤ ⎥ ⎦
=
⎡ ⎢⎣w~
y⎤ + Ly⎥⎦
=
⎡0⎤
⎢⎣I
⎥ ⎦
w~
+
⎡1⎤ ⎢⎣L⎥⎦
y
记
Cˆ
=
⎡0⎤ ⎢⎣I ⎥⎦
,
Dˆ
=
⎡1⎤ ⎢⎣L⎥⎦
则
~x = Cˆ w~ + Dˆ y 上式用降阶观测器的状态 w~ 和测量值 y 给出了系统状态 x 的估计值 ~x 。
基于状态估计值的反馈控制器是 u = −Kx%
直接测量的部分。将状态空间模型(5.1)中的矩阵 A 和 B 作相应的分块,则该状态空间模
实验6极点配置与全维状态观测器的设计

实验6极点配置与全维状态观测器的设计实验 6 极点配置与全维状态观测器的设计⼀、实验⽬的1. 加深对状态反馈作⽤的理解。
2. 学习和掌握状态观测器的设计⽅法。
⼆、实验原理在MATLAB 中,可以使⽤acker 和place 函数来进⾏极点配置,函数的使⽤⽅法如下:K = acker(A,B,P) A,B为系统系数矩阵,P为配置极点,K为反馈增益矩阵。
K = place(A,B,P) A,B为系统系数矩阵,P为配置极点,K为反馈增益矩阵。
[K,PREC,MESSAGE] = place(A,B,P) A,B为系统系数矩阵,P为配置极点,K为反馈增益矩阵,PREC 为特征值,MESSAGE 为配置中的出错信息。
三、实验内容1.已知系统(1)判断系统稳定性,说明原因。
(2)若不稳定,进⾏极点配置,期望极点:-1,-2,-3,求出状态反馈矩阵k。
(3)讨论状态反馈与输出反馈的关系,说明状态反馈为何能进⾏极点配置?(4)使⽤状态反馈进⾏零极点配置的前提条件是什么?1.(1)(2)代码:a=[-2 -1 1;1 0 1;-1 0 1];b=[1,1,1]';p=[-1,-2,-3]';K=acker(a,b,p)K =-1 2 4(3)讨论状态反馈与输出反馈的关系, 说明状态反馈为何能进⾏极点配置?在经典控制理论中,⼀般只考虑由系统的输出变量来构成反馈律,即输出反馈。
在现代控制理论的状态空间分析⽅法中,多考虑采⽤状态变量来构成反馈律,即状态反馈。
从状态空间模型输出⽅程可以看出,输出反馈可视为状态反馈的⼀个特例。
状态反馈可以提供更多的补偿信息,只要状态进⾏简单的计算再反馈,就可以获得优良的控制性能。
(4)使⽤状态反馈配置极点的前提是系统的状态是完全可控的。
2.已知系统设计全维状态观测器,使观测器的极点配置在12+j,12-j 。
(1)给出原系统的状态曲线。
(2)给出观测器的状态曲线并加以对⽐。
实验五利用MATLAB求解极点配置问题
现代控制理论第四次上机实验报告实验五 利用MATLAB 求解极点配置问题实验目的:1、学习极点配置状态反馈控制器的设计算法;2、通过编程、上机调试,掌握系统极点配置设计方法。
实验步骤:1、极点配置状态反馈控制器的设计,采用MA TLAB 的m-文件编程;2、在MA TLAB 界面下调试程序,并检查是否运行正确。
实验要求:1、 在运行以上程序的基础上,针对状态空间模型为[]01034132x x u y x⎡⎤⎡⎤=+⎢⎥⎢⎥--⎣⎦⎣⎦=的被控对象设计状态反馈控制器,使得闭环极点为-4和-5,并讨论闭环系统的稳态性能。
先判断系统能控性:>> A = [0 1 ;-3 -4];B = [0;1];Tc=ctrb(A,B)n=size(A);if rank(Tc)==n(1)disp('The system is controlled')elsedisp('The system is not controlled')endTc =0 11 -4The system is controlled再求状态反馈器:>> A = [0 1 ;-3 -4];B = [0;1];J = [-4 -5];K = place(A,B,J)K =17.0000 5.0000即状态反馈控制器为:状态反馈闭环系统状态空间表达式:A1=A-BK=[0 1;-20 -9]配置极点前:>> A=[0 1 ;-3 -4];B=[0;1];C=[3 2];D=0;step(A,B,C,D)得到波形:配置极点后:A变为A1>> A=[0 1 ;-20 -9];B=[0;1];C=[3 2];D=0;step(A,B,C,D)得到波形:由上述两图对比可知,配置极点后,系统动态性能变好,但是稳态误差变大。
2、 分析极点配置对稳态性能有何影响?如何消除对稳态性能的负面影响?答:配置极点后动态性能变好,但是稳态误差不能消除。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
利用M A T L A B实现极点配置、设计状态观测器现代控制
实 验 报 告
实验名称 利用MATLAB 实现极点配置、设计状态观测器
系 专业 自动化 班
姓名 学号 授课老师
预定时间 实验时间 实验台号 一、目的要求
1、掌握状态反馈和输出反馈的概念及性质。
2、掌握利用状态反馈进行极点配置的方法。
学会用MATLAB 求解状态反馈矩阵。
3、掌握状态观测器的设计方法。
学会用MATLAB 设计状态观测器。
4、熟悉分离定理,学会设计带有状态观测器的状态反馈系统。
二、原理简述
1、状态反馈和输出反馈
设线性定常系统的状态空间表达式为
Cx
y Bu Ax x =+= 如果采用状态反馈控制规律u= r-Kx ,其中 r 是参考输入,则状态反馈闭环系统的传递函
数为:
B BK A sI
C G k 1)]([---=
2、极点配置
如果 SISO 线性定常系统完全能控,则可通过适当的状态反馈, 将闭环系统极点配置到
任意期望的位置。
MATLAB 提供的函数acker( )是用Ackermann 公式求解状态反馈阵K 。
该函数的调用格
式为
K=acker(A,B,P)
其中A 和B 分别为系统矩阵和输入矩阵。
P 是期望极点构成的向量。
MATLAB 提供的函数place( )也可求出状态反馈阵K 。
该函数的调用格式为
K=place(A,B,P)
函数place( )还适用于多变量系统极点配置,但不适用含有多重期望极点的问题。
函数
acker( )不适用于多变量系统极点配置问题,但适用于含有多重期望极点问题。
三、仪器设备
PC 计算机,MATLAB 软件
⎣[
plot(t,y1,':',t,y2,'-')
蓝色为配置前,绿色为配置后
题5-3 某系统状态空间描述如下
[]010100134326100x x u y x
⎡⎤⎡⎤⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥----⎣⎦⎣⎦
= 设计全维状态观测器,要求状态观测器的极点为[]123---。
程序>> A=[0 1 0;0 0 1;-4 -3 -2];
B=[1;3;-6]';
C=[1 0 0];
D=0;
p=[-1 -2 -3];
L=(acker(A',C',p))'
结果:L = 4
-10。